多学科设计优化笔记
1主要研究内容
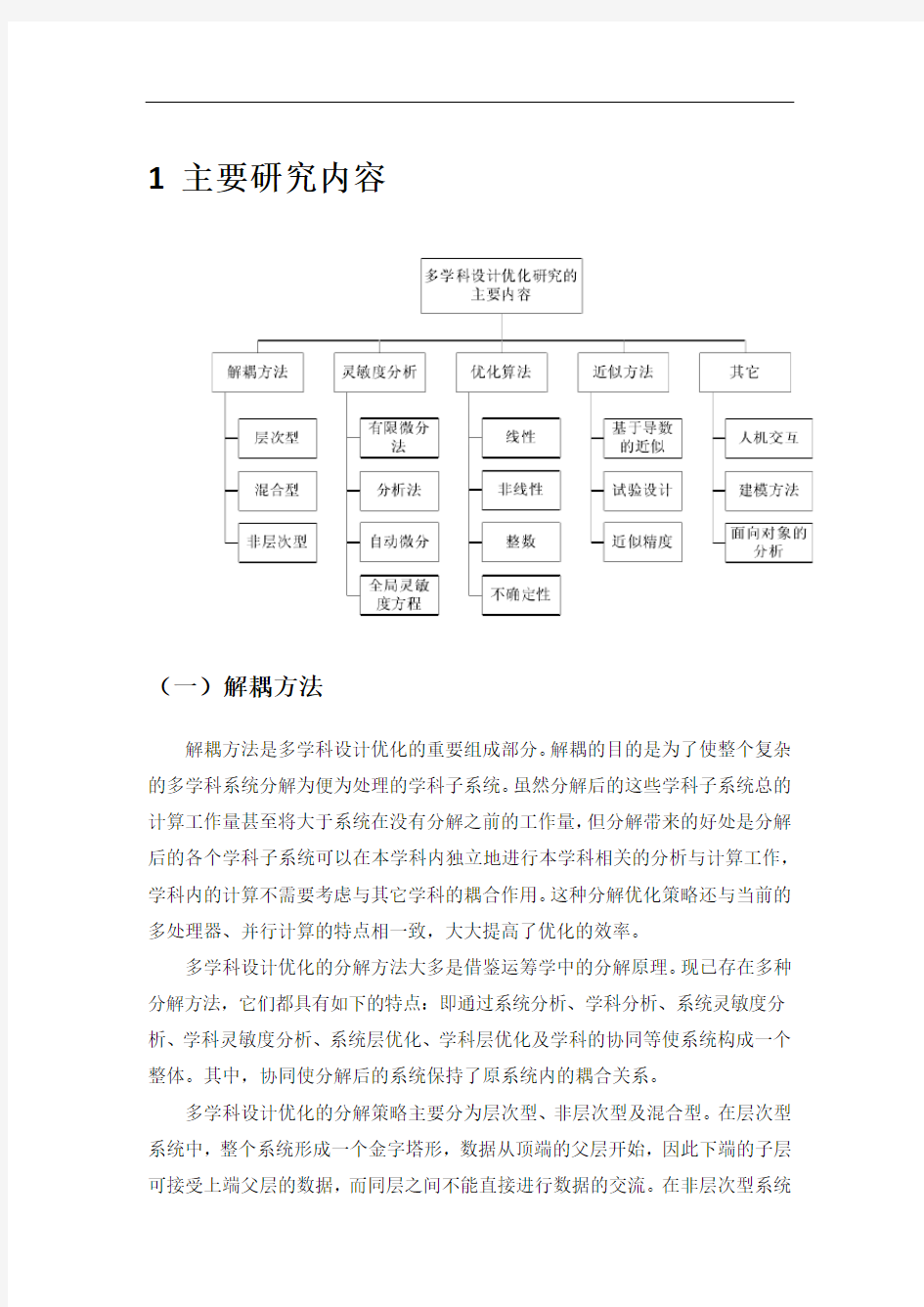
(一)解耦方法
解耦方法是多学科设计优化的重要组成部分。解耦的目的是为了使整个复杂的多学科系统分解为便为处理的学科子系统。虽然分解后的这些学科子系统总的计算工作量甚至将大于系统在没有分解之前的工作量,但分解带来的好处是分解后的各个学科子系统可以在本学科内独立地进行本学科相关的分析与计算工作,学科内的计算不需要考虑与其它学科的耦合作用。这种分解优化策略还与当前的多处理器、并行计算的特点相一致,大大提高了优化的效率。
多学科设计优化的分解方法大多是借鉴运筹学中的分解原理。现已存在多种分解方法,它们都具有如下的特点:即通过系统分析、学科分析、系统灵敏度分析、学科灵敏度分析、系统层优化、学科层优化及学科的协同等使系统构成一个整体。其中,协同使分解后的系统保持了原系统内的耦合关系。
多学科设计优化的分解策略主要分为层次型、非层次型及混合型。在层次型系统中,整个系统形成一个金字塔形,数据从顶端的父层开始,因此下端的子层可接受上端父层的数据,而同层之间不能直接进行数据的交流。在非层次型系统
中,并没有父与子层的关系,故系统中数据可自由交换没有任何限制。由层次型系统与非层次型系统则可构成混合型系统。
多学科系统的分解可以采用原来的经验或例子,也可根据对系统中各个模块之间数据的流向而进行系统的分解或使用一些正规的方法如N-平方法可对多学科系统进行分解[21]。
(二)灵敏度分析
灵敏度分析的基本思想就是为了求得输入变量改变一个单位时输出变量的变化大小。在传统的单学科设计优化问题中,灵敏度分析主要用来计算最优点处优化点对目标函数或约束函数的灵敏度,常通过计算最优点处目标函数或约束函数的导数来实现灵敏度分析。采用的方法有有限微分法、分析法、自动微分法等。从原理上来说,多学科设计优化中采用的灵敏度分析方法与单学科设计优化相同,但由于多学科设计优化中常常具有多个学科分析模块,各个学科分析模块之间存在着耦合关系,即一个学科分析模块的输入变量可能又是另一个学科的输出变量,因此在进行灵敏度分析,计算学科输入变量对输出变量(本学科或其它学科的学科分析模块输出变量)的影响时通常要涉及到其它学科分析模块,传统的灵敏度计算方法已不能胜任多学科设计优化的要求。另一方面,多学科设计优化中灵敏度分析的变量维数也大大多于单学科设计优化问题,所需的数据量也大为的增加。传统的灵敏度分析方法不能简单地推广到多学科设计优化环境中,因此,在多学科设计优化过程中,使用一种新的灵敏度分析手段成为必然。
九十年代初,Sobieski导出了用于耦合系统灵敏度分析的全局灵敏度方程。GSE 是一种能有效计算相互耦合多学科灵敏度的方法,该方法直接从隐函数原理推导而来,精确性较高。Sobieski导出的算法有两种,一种是基于每个学科分析模块残数的导数;一种是基于各个学科分析模块输出对其输入的导数。其中,以第二种方法应用的最为广泛,首先,各个学科独立的完成各自的灵敏度计算,然后集成分析计算全局灵敏度。多学科设计优化的灵敏度分析的作用主要在于跟踪学科之间相互影响的功能,判断耦合性的大小。同时,在一些多学科设计优化方法中,通过全局灵敏度方程得到的全导数被用来对状态变量进行近似处理。
除了以上介绍的灵敏度分析方法外,另外一种灵敏度分析方法是采用神经网
络技术。通过神经网络模拟学科分析模块而实现灵敏度分析计算。神经网络的训练过程通常是在感兴趣的样本点上输出对输入连接权值的不断调整。因此,对于一个训练好的神经网络而言,其连接权值就可以认为是对敏感度的度量。换而言之,它可以被用于求在感兴趣的范围内系统输出对输入的敏感度,也是一种行之有效的方法。
(三)优化算法
在多学科设计优化环境中,优化算法参与优化的方式有两种。如果多学科设计优化的规划是采用单学科优化策略,则只需一个优化算法程序。如果多学科设计优化的规划是采用系统分解与协同的策略,则需要多种或多个优化算法程序。如系统分解后,在系统层和各学科层都需要配置一个优化算法程序,由于系统层和各学科层优化任务的不同,所采用的优化算法也可能不同。因此,在一个多学科设计优化问题中,可能需要综合应用几种算法,才能取得较好的效果。
多学科设计优化所采用的是已有的在单学科优化中所采用的成熟算法,根据问题的不同特点或性质可采用不同算法。如线性规划;以微分算法为基础的非线性规划:序列二次规划、广义既约梯度法、最速下降法、Newton 法、共扼梯度法、变尺度法、可行方向法、Powell 法、罚函数法与变步长下山法;遗传算法:自适应进化法,差分进化法,模拟退火法;随机搜索算法:Latin 超立方体法;整数规划等。到目前为止,在多学科设计优化的应用中,还没有发现一种对任何情况都适用的优化算法。但是对于特定的数学模型,总有一种或者某几种优化算法能取得较好的效果。对于同一个优化任务,也可以采用不同的算法进行计算及比较(因为算法本身有其局限性)来获得任务的最优解。
在这里需要指出的是,序列二次规划算法(SQP)是基于导数的算法中收敛最快的算法,并在优化之前的初始点不必可行的,因此,在多学科设计优化环境中,序列二次规划算法是采用得较为广泛的一种算法。
多学科设计优化算法进一步研究的重点在于开发出一些能解决设计全过程中出现的难解、完全NP、不可微非光滑等问题的高效的、对数学性态没有特殊要求的、具有并行处理特点的优化算法,以适应MDO 问题发展的需要。
(四)不确定性
在多学科设计优化过程中,如果不考虑不确定性因素的影响,则这时得到的优化解也可称之为确定性的优化解。通常,这些确定性的优化解处于设计空间的边界上。但考虑到实际工作环境中的复杂性,特别是各种确定性因素的影响,都将使确定性的优化解产生某些偏差,而更为重要的是将使某些约束条件失效。因此,如果要得到一个具有实际应用价值的优化解,则需要在进行多学科设计优化的同时,考虑如何减小不确定性因素的影响或者将不确定性的大小控制在一个合理的范围内。
由于多学科系统的耦合性,不确定因素在多学科系统中交叉传播,使不确定性的定量计算费用较大。如果伴随着多学科设计优化过程,计算费用将成倍增长。因此,需要根据问题的性质选择恰当的数学方法处理多学科系统中的不确定量大小。已有的数学方法有概率方法、模糊分析法与区间数学法等。但无论那一种数学方法,由于考虑不确定性因素的影响,多学科设计优化将变得复杂。为了减少计算费用,有时可以利用一些简化的手段或者近似处理方法。
(五)近似方法
由于多学科设计优化的复杂性,在某些情况下,直接采用学科模块中的学科分析参与多学科优化将带来许多问题,如将使优化的难度增大,效率低等。其主要表现在以下三个方面,1、对于设计变量较多的情况,优化算法调用目标函数与约束函数的次数将增多,相应地对学科分析的调用次数也将增多,导致的结果是计算量增大,优化时间变长。2、有时各个学科的分析模块驻留在分布于不同计算机或处于不同的地点,不利于将各个学科模块放置于一起进行多学科设计优化。3、某些学科模块分析结果可能有噪声或具有不连续性的特点,如果直接参与优化不仅引入了噪声因素,而且不利于采用梯度优化算法。
由于以上原因,在多学科设计优化中一般不将优化方法中的设计空间搜索程序与学科分析模块直接耦合,而采用了对目标函数与约束函数近似处理的方法。在优化过程中,目标函数或约束函数的近似模型直接参与优化,并经过反复迭代,使优化结果趋近并最终得到原目标函数的优化解。方法避免了在优化的搜索过程
中频繁地进行极其耗时的学科分析,从而大大降低了设计空间搜索工作的计算量。该方法类似于单学科优化的序列优化法。
在应用于工程系统的传统优化近似技术中,常采用基于导数的近似方法,如线性近似和二次近似,这些技术通常为局部近似。在多学科设计优化环境中,更多的是采用全局近似。目前,全局近似的一种形式是利用“可变复杂性模型",也就是在优化过程中同时使用较简单与较复杂的模型,复杂模型为简单模型提供修正尺度,这里的简单模型就可以看作是全局近似。另一种特别适用于多学科设计优化问题的全局近似方法是响应面法。其中一种是用简单的函数(如多项式)来近似代替原函数,另一种实施途径是采用人工神经网络法。
MDO 在应用全局近似时,还需要应用试验设计技术进行数据的采样工作,如响应面法常用到的正交矩阵法。在这里,试验设计的目的是为了使用较少的计算量获得较高的近似精度。
(六)人机交互
多学科设计优化大大提高了解决复杂系统的优化效率,但整个设计过程并不能一步到位,自动完成。在设计过程中,还需要通过人机交互的作用进行人工干预。工程师将控制设计的流程、将设计者的判断与创造力融入到整个设计过程之中。因此,这种人机交互功能在多学科设计优化环境中是至关重要的。
人机交互功能的特点是能灵活地选择自变量与因变量,为了方便设计人员迅速获取这些信息,并能将这些信息以平面图、三维图、不同颜色的图形、正交投影图及动画形式图形等展示出来。其中,动画图形不仅可以显示振动系统中的动态变化行为,而且可以显示设计优化的迭代过程中设计的变化过程。当前,动画展示手段是采用虚拟现实的技术。以上对信息的展示主要局限于变量,而多学科设计优化环境中还需展示的是优化过程中的数据流。将数据流形象地展示给工程设计人员,将有利于设计人员设计思想的连续性,从而激发产生出许多的设计创新点。如Parkinson[22]就开发出一个在多学科设计优化环境中可显示优化中变量、约束、目标函数大小的交互窗口。
人机交互的另一方面是设计人员对优化进程的控制。简单的方法是菜单形式,而更高层次的控制手段则是以二次开发的形式实现对优化进程的控制。它将设计
人员从设计好的菜单式控制中解放出来,更有效地设置优化设计中的计算顺序,减少计算的费用。如Lee[23]在多学科优化环境Engineous中,采用二次开发与人工智能AI 相结合的技术操作与控制优化多学科优化进程。
(七)建模方法
物理系统通常是由多个子系统构成的一个整体,其各个子系统分别代表了系统的某个零件或局部的物理现象。多学科设计优化则是对构成系统的多个子系统进行协同优化以实现对整个系统的优化。因此,建立合适的子系统模型是多学科设计优化的前提。在多学科系统中,各个学科子系统模型是以学科分析模块形式来表现,例如:结构学科的有限元分析模块,气动学科的流体力学模块等。这些模块之间进行的数据交换代表了整个多学科系统的耦合情况。由各个学科分析模块及其模块之间的数据传输如实的反映了现实中的多学科系统的实际情况。因此,多学科优化模型的建立需要考虑的是学科分析模块的建立及如何处理模块之间的数据传输。
多学科系统中的数据传输在多学科优化中需要消耗一定的计算费用。它首先体现在模块之间传输的数据作为输入量进行计算之前都需要经过一次预处理转换。例如,气动学科的流体力学模块的输出量为位移,作为输入量传输给结构学科的有限元模块之前,需要将位移转换为负载量的形式参与有限元模块分析计算。数据传输的计算费用的另一方面是灵敏度方法的计算增大了模块间数据的传输量。针对数据传输所导致计算费用的增加,其处理方法有两种。一是对传输的数据进行近似处理,原来大量的数据传输变为近似模型的模型系数的传输。方法二是将模块间耦合强度高、数据传输量大的模块整合为一个模块来处理,从而部分减少了数据的传输量。
在建立多学科优化设计的数学模型时,需要强调的不能追求数学模型的精度而造成计算费用的大幅度上升,也不能为了减少计算费用而不顾一切地牺牲精确性。为此,采用如下方法来协调模块的计算精度与计算费用问题。首先,多学科优化模型中的学科分析模型与原学科分析模块的原理相同,但忽略了其中许多不重要的细节部分,得到精度较低的近似结果。其二,相对单学科优化中的学科分析模块,多学科优化不直接采用原来复杂的学科分析模块,而根据其它理论构造
计算效率高的分析模块。第三,在同一个学科中,还可建立学科分析模块的各种计算精度、计算费用不同的版本。例如,复杂的分析模块用来处理学科输出计算,简单的分析模块用来计算学科状态变量等。
近年来,随着全生命周期设计概念的提出,多学科优化系统的建立也增加了一些新的学科及其分析模块,这些学科及其模块分别代表了整个系统的经济性、可维护性、制造性与可操作性等,因此研究产品全生命周期建模技术,以适应MDO 的不同需要成为多学科设计建模技术研究的一项新任务。
(八)面向对象的分析
工程设计中的每一步都是以提出问题与解决问题的方式即所谓“What if”方式进行,为了在每一步中快速地解决问题,设计人员需要许多辅助的手段与工具,这些辅助的手段与工具可统称为面向对象分析。其主要包括有不同层次即从简单、近似到复杂、精确的分析方法的选择,设计变量改变时对相应部分进行的快速再分析,灵敏度分析,数据管理与可视化。其中,不同层次的分析将在数学模型中讨论,灵敏度分析将也将在后面作专门讨论,而数据管理与可视化内容较广泛,可参考文献[24]。
快速再分析的目的是使分析代码以一种较灵活的方式组织起来,当设计变量发生变化时,只需要计算尽可能少的代码就可得到分析结果。通常代码是以严格结构化的代码形式组成,每一组设计变量对应的问题将有不同的代码执行选项,如若直接采用结构化的代码组成形式进行快速预测再分析将很困难,而且因为如果对所有问题进行快速预测再分析数据的储存将是巨大的,因此采用严格结构化的代码形式进行问题结果预测是不可行的。
改进的方法是建立系统的模块化形式,构造模块之间、模块与系统外部输入的信息依存关系,这些信息依存关系将被保存与记录,当设计发生变化时,通过这些信息依存关系将找出受到影响的模块,给出为计算预测结果需要再次执行的模块。在进行快速再分析时,对于给出的设计变量的改变,首先需要检查是否保存有设计变量原来执行过的结果,如果有,则可直接得到结果而不需再次分析计算。否则,将利用信息依存关系得到需要进行再次分析计算的最少的一组模块及它们的执行循序,最后分析计算得到所需的结果。这种快速再分析方法将在设计
发生改变时,利用最小的计算量获得分析计算的结果。Kroo[25]与Gage[26]开发出了一种称为PASS 的快速再分析工具,它使用文档的形式保存信息依存关系。
2最优灵敏度分析方法
3滞后耦合伴随方法
4可变复杂度方法
最初的可变复杂度方法(Variable-Complexity Method,简称VCM)是用来发展基于梯度的优化技术,整个设计过程由一组优化循环组成。在各优化循环开始的时候采用精确分析,而近似分析则运用于各循环内的后续计算。精确分析获得一个比例因子,用这个比例因子修正近似分析,而且这个比例因子可以在设计过程中不断更新(Dudley et al., 1995; Hutchison et al., 1994)。VCM 的基本流程为(Alexandrov and Lewis, 2002b):
(1) 分别应用高精度模型和低精度模型计算初始点X0处的目标函数值和约束值;
(2) 求解比例因子;
(3) 使用比例修正后的低精度模型进行优化搜索;
(4) 对优化结果应用高精度模型进行评估;
的结合。在高速民用运输机(High-Speed Civil Transport,简称HSCT)的设计中,成功地应用了该方法。在研究中,首先对由全因子试验设计获得1296 个方案进行初步可行性分析,去除明显不合理的设计,余下157 个设计方案。然后,对这些方案进行低精度模型的分析,建立二次多项式响应面,并根据方差分析(Analysis of Variance, 简称ANOVA)去掉对响应值影响小的项;再根据D-最优设计(D-optimal point selection)选择50 个方案进行高精度分析,并以其结果建立响应面模型(采用方差分析后的响应面形式),以此作为优化对象,该方法取得了良好的结果(Giunta et al., 1995)。
5响应面更新策略
5.1加实验点
5.2Interval Reduction
Once a system optimization is conducted, it is important to check the accuracy ofthe response surface fit. A simple calculation was used to compare values taken from theresponse surfaces to those produced directly from the BB analyses. First, the values {Z |Y | w}* are found by the system optimization. Then these values were used as BB inputparameters, and the BB’s were re-optimized. The difference YBB*-YRS* was taken andnormalized by YBB* to give a measure of the “goodness of fit” obtained in the quadraticrespons e surface model.
The measure of error due to lack of fit was used as a termination criteria. If, at theend of one iteration, the values YRS* and YBB* do not agree by a predetermined tolerance,the response surfaces are reformulated by reducing the intervals around
system optimalvalues.
Reducing the interval sizes has the general property of improving the fit of theresponse surface. Indeed, as the intervals are reduced, the fit becomes more and morelinear. It is desired that the new interval be centered on the anticipated optimum value,and that the new interval makes physical sense. Since the Y and w variables are notsubject to any clear physical limitations, their interval bounds are allowed to “drift”across the original interval bounds. However, the Z variab les are subject to such physicallimitations so their intervals must always lie within the original interval bounds. Thesedifferences lead to the use of two different interval reduction methods.
Intervals on system level variables Z are reduced in such a way as to ensure thesubsequent interval would fall within the physical bounds described by the originalinterval. For example, let XLi and XHi denote the respective lower and upper limits onthe interval used to generate a response surface. If the termination tolerance is notsatisfied, then the interval is reduced by 20% and centered on the system optimal value.
If any of the new XLi+1is less than XLi , the value is returned to XLi. Similarly, if any ofthe XHi+1 is larger than XHi the interval limit is returned to XHi. This operation shrinksthe interval over which points are placed to generate the response surfaces. It should benoted, however, that reducing the intervals in this manner does not ensure that the newinterval is centered on the optimum found in the previous iteration.
The factor by which the interval is reduced each iteration was chosen somewhatarbitrarily. Since the interval is reduced each iteration (without the possibility of beingincreased), it is important to reduce the interval size gradually to prevent prematureconvergence to an unreliable optimum.
The intervals for coupling variables Y and weight factors w were not subject tothe limitation of falling within the original interval. Therefore, the intervals are allowedto shift solely on the basis of where the optimum was found on the previous iteration.
This carries the added benefit of centering the RS’s in the middle of the design
space withrespect to Y and w, so satisfaction of the coupling constraints is always possible.
A simple algorithm was adapted from [16] for re-sizing the intervals on Z and w.
First, a factor K is defined for reducing the interval size. This factor is not directlyapplied to the current interval. Instead, an adjustment factor A i is determined by linearinterpolation as:
whereC i is the center of the current interval, Opti is the optimum found in the currentinterval, and Li is the lower value of the current interval. The actual reduction factor canthen be found as:
The result of this process is that the interval size will not be reduced if the optimum pointis located on a boundary, while it will be reduced by a factor of K when the optimumpoint is located at the center.
Additionally, a history of optimum location with respect to bounds is kept. If thebest design point hits the same bound twice, the interval is expanded by a fixed amount.If the optimum oscillates from upper to lower bounds between iterations, the interval isreduced by a fixed amount.
5.3Modified Interval Reduction(自创)
此方法与original interval reduction类似,只是when we follow the routine of original one to reduce the interval, number of existed experiment point may be reduced to the one not enough to perform RSM. 因而在reducing the interval时,bring in an out-screening mechanism, namely, 在确定在reduced interval中存在足够的实验点时按照original interval reduction进行操作,否则在以上一cycle的优化点为中心的情况下,选择能保证存在足够实验点的最小interval,遇到边界时
将interval的另一边界向相反的方向移动以保证存在足够的点。
5.4实验点选取方法
1)选择上一cycle的解点即最优点
2)类似SKO或MSKO的取点方法,取得全局最优点利用max( expented-improvement)
5.5Move limit(Move limits definition in structural
optimizationwith sequential linear
programming.Part I: Optimization algorithm)
Since Pope introduced move limits in the early 70s,researchers proposed a variety of techniques to definethe move limits. Haftka and Gurdal [1] suggests tochoose as move limit the 10–30% of the value that adesign variable has at the beginning of the iterationcycle. The move limits are gradually shrunk as the designapproaches the optimum and they should be reducedif the cost function does not improve or theconstraints are more violated than at the previous iteration.Vanderplaats and Kodyalam [6] adopt the followingcriterion: the move limits are very large in thefirst design cycles and they are then reduced by 50% ifthe design violates the constraints more than at theprevious iteration; anyhow the move limits are neverreduced to less than 25%. John et al. [7] solve the linearizedsub-problems with the Simplex algorithm. Movelimits are reduced by means of the a parameter each timethe design does not improve in the current iterate. Theoptimal step size a is determined with reanalysis techniquesbased on quadratic approximations of the costfunction.
原则:They concluded that a proper choice of themove limits should ensure that the objective functionimproves monotonously, that each intermediate solutionis feasible, that the design variable movement is controlledin order to maintain the approximation error at areasonable level.
It can be seen from Fig. 1 that the value of the trustregion parameter q gets smaller than one when the designvariables are perturbed so that the cost functionimproves. In such a case, the linear model computes thesmallest value for the trust region parameter while highorder approximation models result in smoothing thevariations of the q parameter. Therefore, the linearmodel may be considered the most conservative schemefor the purpose of shrinking move limits.
6MDO基本理论(飞行器MDO过程)6.1定义
6.2基本优化组织模式
6.3单级优化过程
(完整版)GPS控制网的优化设计毕业设计
GPS控制网的优化设计
GPS控制网的优化设计 摘要 优化设计是最优化理论和方法在设计中的应用,力求以最低的成本、最高的效率达到最优的目标。本文通过一系列的分析,对控制网的优化方法进行分析,说明可行性。 为了解决控制网优化设计问题,本论文分两大部分,GPS网的优化设计和GPS网的精度和可靠性,在 GPS网形设计中,首先根据工程的特点和GPS网设计规范的要求,大致确定网的规模,用图论和树的有关算法推导出GPS网形中点、边、异步环之间的关系,然后给出一种生成网形的算法,自动生成初步网形,并用模拟法在顾及精度和可靠性准则下对初步网形进行优化设计,确定最终网形,并按最小路径方法生成观测方案。 关键词: GPS控制网,优化设计,精度,可靠性 OPTIMIZING DESIGNING OF CONTROL NETWORK
ABSTRACT The optimization design is a application of the most optimizative theory and method in the design. It is design of GPS control network’s methods by a series of analysis. This paper consists of two parts: Optimizing designing of GPS control network and the Precision and Reliability of GPS network. When designing a GPS control network ,its scale should be predicted as the project requested and the GPS surveying standard disciplined. According to the relationship among GPS points , edges and nonsynchronous loops, we can use an algorithm of Graphic Theory to produce a network when given the number of points and the maximum edges of each nonsynchronous loop, after being modified by using simulate optimizing method we can draw the ultimate network, then the observation plan can be gained by using the best way algorithm. KEYWORDS:gps control network, optimizing designing, precision, reliability
读书笔记清洁生产
研究生学位课程 读书笔记 科目清洁生产 专业环境工程 学号 201131497 姓名吴金鸿 日期 2012年06月29日 西北大学研究生处
废纸造纸企业的清洁生产 摘要:在废纸造纸行业发展及污染现状的基础上,提出实施清洁生产是废纸造纸行业治理污染,实现可持续发展健康之路。 关键字:废纸;清洁生产;处理 Abstract:On the basis of development and pollution status of waste paper and paper industry, Implementation of cleaner production is paper and paper industry control pollution and to achieve sustainable development of the road to health. Key Words:Wastepaper;Cleaner production;Deal with 1我国废纸造纸行业的发展 纤维原料来源紧张是今后世界造纸上业面临的重大课题之一,解决这一课题的措施,除大力发展速生人工造纸林外,回用废纸是一个重要途径,废纸造纸其有设备投资少,工艺技术简单,环境污染负荷相对较小,能有效利用废纸资源等优点,已经在造纸行业中占有相当大的比重。随着废纸回收利用的快速增长,最大限度的回收利用废纸是造纸工.业实现清洁生产,走可持续发展的主要方向之一,废纸再制浆工艺因废纸种类、来源、质量与废纸浆的用途不同差异较大,废纸制浆过程的主要污染是废水和废渣,清洁生产方案的实施是一项系统工程,涉及到观念、资金、技术、知识等诸多方面因素。废纸造纸行业应从自身的特点出发,结合其它行业清洁生产的经验,重点在物料综合利用、企业内部管理、工艺设备改造、废纸制浆新土艺、废纸脱墨技术、废水处理及综合利用等方面寻求清洁生产的机会和潜力,研制并实施各项清洁生产方案,使清洁生产在该行业获得巨大的环境、经济和社会效益[1]。 2.废纸造纸企业的清洁生产 2.1清洁生产的发展 进入 20 世纪 80 年代,全球经济发展加速,环境问题日益严峻,数十年工业排污积累的潜在危害开始暴露,气候变化等全球性问题引起了全世界的高度重视。实践中人们认识到以往的解决工业污染的方法都是治标不治本的方法,彻底的解决方法必须是“将综合预防的环境策略持续地应用于生产过程和产品中,以
机械优化设计论文(基于MATLAB工具箱的机械优化设计)
基于MATLAB工具箱的机械优化设计 长江大学机械工程学院机械11005班刘刚 摘要:机械优化设计是一种非常重要的现代设计方法,能从众多的设计方案中找出最佳方案,从而大大提高设计效率和质量。本文系统介绍了机械优化设计的研究内容及常规数学模型建立的方法,同时本文通过应用实例列举出了MATLAB 在工程上的应用。 关键词:机械优化设计;应用实例;MATLAB工具箱;优化目标 优化设计是20世纪60年代随计算机技术发展起来的一门新学科, 是构成和推进现代设计方法产生与发展的重要内容。机械优化设计是综合性和实用性都很强的理论和技术, 为机械设计提供了一种可靠、高效的科学设计方法, 使设计者由被动地分析、校核进入主动设计, 能节约原材料, 降低成本, 缩短设计周期, 提高设计效率和水平, 提升企业竞争力、经济效益与社会效益。国内外相关学者和科研人员对优化设计理论方法及其应用研究十分重视, 并开展了大量工作, 其基本理论和求解手段已逐渐成熟。 国内优化设计起步较晚, 但在众多学者和科研人员的不懈努力下, 机械优化设计发展迅猛, 在理论上和工程应用中都取得了很大进步和丰硕成果, 但与国外先进优化技术相比还存在一定差距, 在实际工程中发挥效益的优化设计方案或设计结果所占比例不大。计算机等辅助设备性能的提高、科技与市场的双重驱动, 使得优化技术在机械设计和制造中的应用得到了长足发展, 遗传算法、神经网络、粒子群法等智能优化方法也在优化设计中得到了成功应用。目前, 优化设计已成为航空航天、汽车制造等很多行业生产过程的一个必须且至关重要的环节。 一、机械优化设计研究内容概述 机械优化设计是一种现代、科学的设计方法, 集思考、绘图、计算、实验于一体, 其结果不仅“可行”, 而且“最优”。该“最优”是相对的, 随着科技的发展以及设计条件的改变, 最优标准也将发生变化。优化设计反映了人们对客观世界认识的深化, 要求人们根据事物的客观规律, 在一定的物质基和技术条件下充分发挥人的主观能动性, 得出最优的设计方案。 优化设计的思想是最优设计, 利用数学手段建立满足设计要求优化模型; 方法是优化方法, 使方案参数沿着方案更好的方向自动调整, 以从众多可行设计方案中选出最优方案; 手段是计算机, 计算机运算速度极快, 能够从大量方案中选出“最优方案“。尽管建模时需作适当简化, 可能使结果不一定完全可行或实际最优, 但其基于客观规律和数据, 又不需要太多费用, 因此具有经验类比或试验手段无可比拟的优点, 如果再辅之以适当经验和试验, 就能得到一个较圆满的优化设计结果。 传统设计也追求最优结果, 通常在调查分析基础上, 根据设计要求和实践
多学科设计优化简要介绍
多学科设计优化简要介绍 多学科设计优化 (Multidisciplinary Design Optimization,简称 MDO)是一种通过充分探索和利用工程系统中相互作用的协同机制来设计复杂系统和子系统的方法论。其主要思想是在复杂系统设计的整个过程中利用分布式计算机网络技术来集成各个学科 (子系统 )的知识,应用有效的设计优化策略,组织和管理设计过程。其目的是通过充分利用各个学科(子系统 )之间的相互作用所产生的协同效应,获得系统的整体最优解,通过实现并行设计,来缩短设计周期,从而使研制出的产品更具有竞争力。因此,MDO宗旨与现代制造技术中的并行工程思想不谋而合,它实际上是用优化原理为产品的全寿命周期设计提供一个理论基础和实施方法。 MDO研究内容包括三大方面:1,面向设计的各门学科分析方法和软件的集成;2,探索有效的 MDO算法,实现多学科 (子系统 )并行设计,获得系统整体最优解;3,MDO分布式计算机网络环境。 多学科设计优化问题 ,在数学形式上可简单地表达为: 寻找:x 最小化:f=f(x,y) 约束:hi(x,y)=0 (i=1 ,2 ,… ,m) gj(x,y)≤ 0 (j=1 ,2 ,… ,n) 其中:f 为目标函数;x为设计变量;y是状态变量;hi(x,y)是等式约束;gj(x,y)是不等式约束。状态变量 y,约束 hi 和 gj以及目标函数的计算涉及多门学科。对于非分层系统,状态变量 y,目标函数 f,约束hi 和 gj 的计算,需多次迭代才能完成;对于分层系统,可按一定的顺序进行计算。这一计算步骤称为系统分析。只有当一设计变量 x通过系统分 随着科学技术日新月异的发展,我们的武器装备,尤其是战斗机的水平日益提高,装备复杂程度已远超乎平常人的想象,装备设计不单要用到
优化设计方法的发展与应用情况
优化设计方法的发展与应用情况 贾瑞芬张翔 (福建农林大学 机电工程学院, 福建 福州 350002) 摘 要:本文概要地介绍了优化设计方法在国内近年的应用和发展情况,包括传统优化方法、现代优化方法,以及优化软件的应用和发展情况。 关键词:优化 遗传算法 神经网络 MATLAB 优化方法是20世纪60年代随着计算机的应用而迅速发展起来的,较早应用于机械工程等领域的设计。80年代以来,随着国内有关介绍优化设计方法的专著(如《机械优化设计》[1])的出版和计算机应用的普及,优化设计方法在国内的工程界得到了迅速的推广。本文按传统优化方法、现代优化方法、优化软件应用等三个方面,概要地介绍优化设计方法近年来在国内工程界的应用和发展情况。 1. 传统优化方法的应用与改进情况 1.1传统优化方法的应用 从近10年发表的工程优化设计的论文可以看出,罚函数法、复合形法、约束变尺度法、随机方向法、简约梯度法、可行方向法等,都有较为广泛的应用。对重庆维普信息数据库中的工程技术类刊物做检索,1993年至2003年,这6种约束优化方法应用的文献检出率的比例,依次约为12:10:3:1.5:1.5。 以机械设计为例,传统优化方法主要应用于机构和机械零部件的优化设计,主要对零件或机构的性能、形状和结构进行优化。在结构方面,如对升降天线杆的结构优化设计[2],采用内点罚函数法优化,在保证天线杆具有足够的刚度和压弯组合强度的前提下所设计出的结构尺寸比按一般的常规设计方法所计算的尺寸要小,自重更轻。在形状方面,赵新海等[3]对一典型的轴对称H型锻件的毛坯形状进行了优化设计,取得了明显的效果。在性能方面,《凸轮一连杆组合机构的优化设计》[4]一文以最大压力角为最小做为优化目标、并采用坐标轮换法和黄金分割法等优化方法对书本打包机中的推书机构(凸纶—连杆组合机构)进行优化设计,从而使得机构确保运动的平衡性的前提下具有良好的传力性能,使设计结果更加合理。《弹性连杆机构结构和噪声控制一体化设计》[37]一文,利用改进的约束变尺度法,求解基于噪声控制的弹性连杆机构结构控制同步优化问题,同步优化后机构的声辐射性能指标具有明显改善。由以上的例子可以看出,因此,传统优化方法仍然具有不可忽视的作用。 将优化技术与可靠性理论相结合,形成了可靠性优化设计法。按照可靠性优化设计法设计的产品,既能定量地回答产品在运行中的可靠性,又能使产品的功能参数获得优化解,两种方法相辅相成,是一种非常具有工程实用价值的设计方法。如采用惩罚函数内点法求解齿轮传动的可靠性优化设计的数学模型[5],以及运用二阶矩法和约束随机方向法对钢板弹簧进行可靠性优化设计[6]。 1.2传统优化方法的一些改进 目前,随着工程问题的日益扩大,优化要面对的问题的规模和复杂程度在逐渐增大,传统的优化方法解决这些问题时,就显露出了其局限性与缺陷。于是就出现了在分析现有算法的基础上,针对方法的不足或应用问题而作出的改进。 1.2.1对传统优化方法应用于离散变量优化的改进 工程设计问题中,经常遇到设计变量必须符合本行业的设计规范和标谁,只能取为限定的离散值或整数值的情况。若应用连续变量优化方法.得到最优解后再作简单的圆整处理,可能造成设计上的不可行解,或得到一个非最优解。为此适用于变量取离散值的优化方法发展起来。朱浩鹏等[7]提出了改进的动态圆整法、拉格朗日松弛法。 惩罚函数优化方法是一种常用的求解约束非线性问题的方法,但它仅限于求解连续变量的优化问题。
北航飞行器多学科设计优化复习题
飞行器多学科设计优化复习题 1.优化设计问题的三要素是什么?给出一个优化设计问题的例子,分别说明三个要素的具体内容。 三要素分别是设计变量,约束条件和目标函数。 以结构优化设计为例,设计变量可能是蒙皮厚度,前后翼梁缘条厚度,前后翼梁腹板厚度等结构参数;约束条件是机翼强度要求、刚度要求等目标函数是最小化结构重量。 2.飞行器设计一般分哪几个阶段?飞行器多学科优化设计有什么意义? 飞行器设计分三个阶段:概念设计、初步设计、详细设计。 飞行器MDO的意义为: (1)MDO符合系统工程的思想。能有效提高飞行器的设计质量 (2)MDO为飞行器设计提供了一种并行设计模式。 (3)MDO的设计模式与飞行器设计组织体制一致,能够实现更高程度的自动化。 (4)MDO的模块化结构使飞行器设计过程具有很强的灵活性。 3.在飞行器设计过程中,多学科设计优化方法与传统设计方法之间有哪些相同和不同点。 传统的飞行器设计优化中,采取的是一种串行的设计模式,往往首先进行性能设计优化,然后进行结构、操纵和控制系统设计优化,最后进行工艺装备设计。在传统的方法中,各个学科任务成了实现系统设计的最基本单元,影响飞机性能的气动、推进、结构和控制等学科被人为地割裂开来,各学科之间相互耦合所产生的协同效应并未被充分考虑进去,这可能导致失去系统的整体最优解,串行的模式也使得设计时间周期和成本大大增加。 而多学科优化设计技术是一种并行设计模式,它以各子系统、学科的优化设计为基础,在飞行器各个阶段力求各学科的平衡,充分考虑哥们学科之间的相互影响和耦合作用,应用有效的设计/优化策略和分布式计算机网络系统,来组织和管理整个系统的设计过程,通过充分利用各个学科之间的相互作用所产生的协同效应,以获得系统的整体最优解。 相同点在于都有对于子学科的分解,但是MDO更注重子学科间的协同。 4.给出MDO的三种定义,根据你的理解,MDO该如何定义? Definition1:MDO是一种通过充分探索和利用系统中相互作用的协同机制来设计复杂系统和子系统的方法论。 Definition2:MDO是指在复杂工程系统的设计过程中,必须对学科(子系统)之间的相互作用进行分析,并且充分利用这些相互作用进行系统优化合成的方法。 Definition3:多学科设计优化就是进行复杂系统的设计过程中,结合系统的多学科本质,充分利用各种多学科设计与多学科分析工具,最终达到基于多学科优化的方法论。 My Definition:当设计中每个因素都影响另外的所有因素时,确定该改变哪个因素以及改变到什么程度的一种设计方法。 5.多学科设计优化中,什么是学科分析?什么是系统分析? 学科分析:也成为子系统分析或子空间分析,以某一学科设计变量,其他学科对该学科的耦合状态变量和系统的参数为输入,根据某一学科满足的物理规律确定其物理特性的过程 系统分析:对整个系统,给定一组设计变量X,通过求解系统的状态方程得到系统状态变量的过程。 6.什么是多学科设计优化的状态变量?学科状态变量和耦合状态变量之间有什么区别?
卓有成效的管理者-读书笔记
根据人力资源课老师的推荐,我有幸拜读了德鲁克的名著《卓有成效的管理者》,并受益匪浅。这本书的核心观点是:对组织负有责任,能影响组织经营成果的人,就是管理者。管理者的工作必须是卓有成效,卓有成效是可以学会的。 通过阅读总结,我认为要成为一个卓有成效的管理者,应当做到: 一、重视目标和绩效管理。通过确定自己的工作目标,让自己的工作更有计划性。使自己的日常工作始终围绕目标进行,通过责任意识将计划的执行到位,保证工作目标的实现。而现实中团队的目标,要通过组织来实现。这要求我们要加强组织内部沟通和团队合作,通过各种激励手段和培训等手段来实现组织目标。 二、做好时间管理。我认为要更好的实现目标,同一时间只做一件最重要的事情,这样才能做到最好。这就要求我们慎重设定自己工作的优先顺序,将宝贵的时间资源进行最合理的划分。 三、用人所长。如何发挥一个人的长处,使他在团队中做出最大贡献,这是我们学习人力资源管理课的目的。这要求我们根据工作中时刻变化的形势,对人员做出客观的评价,并合理搭配班子、进行性格互补和工作按流程咬合、做好人性的制衡,知人善用,善于挖掘人才、激发潜力,做好授权和及时沟通。 四、进行有效决策。管理者每天要做很多决策,这必然分散他的注意力,降低决策的效益。这就要求我们首先要关注经营核心,集中有限的精力投入到影响经营结果的核心业务上,从关乎企业命运的战略目标着手,审慎制定战术策略和行动措施,按工作的轻重缓急安排先后顺序,充分发挥组织内各人的专业学历、经历特长,在总结过往经验的基础上做好综合分析和换位思考,把握机遇,有胆有谋,进行有效的决策,完成组织目标。 五、关注运营体系建设。达成目标要讲究方法策略,这就要求我们在工作上有一套完整的运营管理体,使组织内各人各负其责,按照既定规范,最大效率的完成日常工作,将更多的经历和时间给予“危机管理”,才能确保企业长盛不衰。 结合着《卓有成效的管理者》中关于有效管理的方法和案例,我更深刻的认知到管理能够优化经营效果,特别是战略目标的确定、组织结构的设置、激励政策关注的核心对经营效果的影响是至关重要的,并书中的成熟做法,对照自身的不足,对日常工作进行了改进: 加强职业素养培养,强化时间管理和进度控制,时刻强调有效决策,将管理的基本常识用到日常工作中,关注自己的核心业务绩效,重视长久利益,做到顺时应势、与时俱进。 2、一向对畅销书有点抵制心理,也不知道是出于标新立异的想法还是觉得畅销书太过大众,体现不了自己的能力,总之这个想法一直制约着自己,让自己成为井底之蛙。上半年的《一个经济杀手的自白》让我已经感觉到,即使再大众读物,你大概也只知道其中的一小部分。这次看完《卓有成效的管理者》后,更是印证了这个想法。这段话写在开头,算是对自己的一个警醒:不要夜郎自大! 全书分7部分,分问题列表,时间管理,我能贡献什么,发挥别人长处,要事优先,决策要素和有效决策几个模块。除了第一部分仍然有部分意见不能苟同外,其他部分,看了深受启发。第一部分讲到:卓有成效是可以通过学习掌握的。个人以为,还需要天赋及管理者某些共同的性格特点(现在还不能完全描述,但是成功的管理者都有,做事持续跟进的能力),当然不排除为了更畅销,鼓励一下我们这样资质一般读者的购买潜力:)
控制网优化设计复习题
1 GPS卫星定位的基本原理 GPS卫星定位的基本原理,就是把卫星视为“飞行”的控制点,在已知其瞬时坐标的条件下,以GPS卫星和用户接收机天线之间的距离为观测量,进行空间距离后方交会,从而确定用户接收机天线所处的位置。 2 在进行载波相位定位时,在不同观测时段,载波可以分别划分为那几个阶段 3 坐标系之间的坐标转换过程 举例:WGS—84大地坐标系至80平面直角坐标系: 方法一:先将WGS—84大地坐标系转换成WGS—84空间直角坐标系,再将WGS —84大地坐标系,利用七参数(三个平移参数,三个旋转参数,一个尺度变换参数)转变成80空间直角坐标系,在将80空间直角坐标系转换成80大地坐标系,通过高斯投影,输入相应中央子午线经度L0,将其转换成80平面直角坐标系。 方法二; 通过高斯投影,输入相应中央子午线经度L0,先将WGS—84大地坐标系转换成WGS—84平面直角坐标系,再利用四参数(两个平移参数,一个旋转参数,一个缩放参数)将WGS—84平面直角坐标系转化成80平面直角坐标系。 4 GPS网络数据处理的基本过程 设置参数,选择椭球,导入数据,数据修正,基线解算,检核基线质量,无约束平差,无约束平差质量检核,约束平差(改变坐标基准,输入控制点),质量检核,导出数据 5 GPS控制网优化设计的分类处理方法 GPS控制网优化设可以参照传统控制网优化设计进行分类处理: 零类设计:即控制网的基准设计,是对一个已知图形结构和观测方案的自由GPS 网确定最优坐标系统的优化设计。对于区域GPS网来说,主要确定控制网的投影面和投影带,一般要考虑现有坐标系统的利用及其两种坐标系统的转换。 一类设计:即控制网图形设计,是在约定网的精度和观测方案的情况下,求得最佳点位的优化设计。研究表明,尽管GPS对网形设计要求不十分严格,但是网形仍然影响着最后成果的精度。GPS网图形设计主要考虑连接方式:即边连接,点连接,重复设站比率,重测基线比率等。 二类设计:即观测方案的最佳选择。选择观测方案主要反映在选星计划,行车路线,观测时间和数据处理方法等内容。 三类设计:用GPS改造现有控制网的最优设计。主要考虑在什么地方加测GPS基线向量,加则多少。在设计时主要计算各种方案的经费、精度和可靠性。 6 GPS网络数据处理精度控制指标 一基本精度指标:各级GPS网测量精度用相邻点弦长标准差 二基线解算质量控制指标:1 基线本身限制, 2 网限制:(1)同一时段观测值的数据剔除率应小于10%。
机械优化设计综述及其应用举例
机械优化设计综述与应用 苟晓明 (重庆理工大学重庆汽车学院,重庆市400054) 摘要:机械优化设计是一门实践性很强的综合性学科,在现代机械设计中占有非常重要的地位,其应用价值十分高,是非常有发展潜力的研究方向。文章对机械优化设计的基本理论,基本研究思路、优化设计方法、软件的应用情况以及应用中可能遇到的问题等分别进行了简述,分析了优化设计应用的发展趋势。并应用Matlab优化工具箱对产品进行了优化设计应用实例分析。 关键词:机械优化设计;优化方法;蜗杆传动;Matlab Summary of Mechanical Optimal Design and Application GOU Xiao Ming (Chongqing University of Technology, Chongqing Automobile Institute,Chongqing,400054,Chain) Abstract: Mechanical optimal design is a very practical comprehensive discipline, it plays a very important role in modern mechanical design. Its value is very high, and is very promising research direction. This article summarized the basic theory of optimal design, research ideas, optimal design method, the application of software and possible problems in use the software. Analyze the application and trends of optimization methods. And use Matlab optimization toolbox to analyze the optimal design of products. Key words:mechanical optimal design; optimization method;worm transmission; Matlab 0 引言 优化设计是20世纪60年代发展起来的,以数学规划理论为基础,根据最优化的原理和方法,应用计算机技术,寻求最优设计参数的一种新方法,为工程设计提供了一种重要的科学设计方法。优化设计首先需根据工程需要将实际问题转化成数学模型,然后选择合理的优化方法,通过计算机求得最优解。能使设计周期大大缩短,提高计算精度、设计效率和设计质量。因此优化设计是现代设计理论和方法的一个重要领域,它已广泛应用于各个工业部门,已成为设计方法的一个重要发展趋势。 1 优化设计基本概念 机械优化设计就是在满足给定的载荷、环境条件、产品的形态、几何尺寸关系或其它约束条件下,以机械系统的功能、强度和经济性等为优化对象,选取设计变量,建立目标函数和约束条件, 利用数值优化计算方法使目标函数获得最优设计方案一 种现代设计方法]3 1[ 。进行最优化设计时,首先必须将实际问题加以数学描述,形成一组由数学表达式组成的数学模型,然后选择一种最优化数值计算方法和计算机程序,在计算机上运算求解,得到一组由数学表达式组成的最优设计参数。利用优化设计,可进一步改善和提高产品的性能;在满足各种设计条件下减少产品或工程结构重量,从而节省产品成本消耗、降低工程造价;可以进一步提高产品或工程设计效率。因此,优化设计是直接提高产品设计性能、降低产品成本的有效设计方法。优化设计可给企业带来直接的经济效益,从而提高企业产品的竞争能力。 优化设计的目标是使设计对象最优,而优化设计的手段是计算机及优化计算软件。优化计算软件是以优化计算方法为基础而形成的应用程序系统。因此,优化设计还可以被理解为采用计算程序的从设计空间搜索最佳设计方案的现代设计手段。优化设计与常规设计相比具有借助计算机为工具的明显特征。优化设计中优化计算方法的数学基础包括线性规划、非线性规划、动态规划、几何规划等内容的数学规划理论。 优化设计一般包含如下主要内容:①将设计中的实际物理模型抽象为数学模型。确定设计过程中主要的设计目标和设计条件,在此基础上构造评价设计方案的目标函数和约束条件等。②数学模型的求解。根据数学模型的性质,选择合适的优化方法,并利用计算机进行数学模型的求解,得到优化设计方案。 任何机械设计问题,总是要求满足一定的工作条件、载荷和工艺等方面要求,并在强度、刚度、
数学建模读书笔记
数学建模是通过对实际问题进行抽象、简化,反复探索,构件一个能够刻划客观原形的本质特征的数学模型,并用来分析、研究和解决实际问题的一种创新活动过程。 数学建模的几个过程: 模型准备:了解问题的实际背景,明确其实际意义,掌握对象的各种信息。用数学语言来描述问题。 模型假设:根据实际对象的特征和建模的目的,对问题进行必要的简化,并用精确的语言提出一些恰当的假设。 模型建立:在假设的基础上,利用适当的数学工具来刻划各变量之间的数学关系,建立相应的数学结构。(尽量用简单的数学工具) 模型求解:利用获取的数据资料,对模型的所有参数做出计算(估计)。 模型分析:对所得的结果进行数学上的分析。 模型检验:将模型分析结果与实际情形进行比较,以此来验证模型的准确性、合理性和适用性。如果模型与实际较吻合,则要对计算结果给出其实际含义,并进行解释。如果模型与实际吻合较差,则应该修改假设,在次重复建模过程。 模型应用:应用方式因问题的性质和建模的目的而异 数学建模就是建立数学模型,建立数学模型的过程就是数学建模的过程,数学建模是一种数学的思考方法,是运用数学的语言和方法,通过抽象、简化建立能近似刻划并"解决"实际问题的一种强有力的数学手段。 数学模型的分类 (1)按模型的应用领域分类: 生物数学模型,医学数学模型,地质数学模型,数量经济学模型,数学社会学模型等。(2)按是否考虑随机因素分类: 确定性模型与随机性模型 (3)按是否考虑模型的变化分类: 静态模型与动态模型 (4)按应用离散方法或连续方法分类: 离散模型与连续模型 (5)按建立模型的数学方法分类: 几何模型,微分方程模型,图论模型,规划论模型,马氏链模型等。 (6)按人们对是物发展过程的了解程度分类: 白箱模型:指那些内部规律比较清楚的模型。如力学、热学、电学以及相关的工程技术问题。灰箱模型:指那些内部规律尚不十分清楚,在建立和改善模型方面都还不同程度地有许多工作要做的问题。如气象学、生态学经济学等领域的模型。 黑箱模型:指一些其内部规律还很少为人们所知的现象。如生命科学、社会科学等方面的问题。但由于因素众多、关系复杂,也可简化为灰箱模型来研究。 数学建模方法
多学科设计优化笔记
1主要研究内容 (一)解耦方法 解耦方法是多学科设计优化的重要组成部分。解耦的目的是为了使整个复杂的多学科系统分解为便为处理的学科子系统。虽然分解后的这些学科子系统总的计算工作量甚至将大于系统在没有分解之前的工作量,但分解带来的好处是分解后的各个学科子系统可以在本学科内独立地进行本学科相关的分析与计算工作,学科内的计算不需要考虑与其它学科的耦合作用。这种分解优化策略还与当前的多处理器、并行计算的特点相一致,大大提高了优化的效率。 多学科设计优化的分解方法大多是借鉴运筹学中的分解原理。现已存在多种分解方法,它们都具有如下的特点:即通过系统分析、学科分析、系统灵敏度分析、学科灵敏度分析、系统层优化、学科层优化及学科的协同等使系统构成一个整体。其中,协同使分解后的系统保持了原系统内的耦合关系。 多学科设计优化的分解策略主要分为层次型、非层次型及混合型。在层次型系统中,整个系统形成一个金字塔形,数据从顶端的父层开始,因此下端的子层可接受上端父层的数据,而同层之间不能直接进行数据的交流。在非层次型系统
中,并没有父与子层的关系,故系统中数据可自由交换没有任何限制。由层次型系统与非层次型系统则可构成混合型系统。 多学科系统的分解可以采用原来的经验或例子,也可根据对系统中各个模块之间数据的流向而进行系统的分解或使用一些正规的方法如N-平方法可对多学科系统进行分解[21]。 (二)灵敏度分析 灵敏度分析的基本思想就是为了求得输入变量改变一个单位时输出变量的变化大小。在传统的单学科设计优化问题中,灵敏度分析主要用来计算最优点处优化点对目标函数或约束函数的灵敏度,常通过计算最优点处目标函数或约束函数的导数来实现灵敏度分析。采用的方法有有限微分法、分析法、自动微分法等。从原理上来说,多学科设计优化中采用的灵敏度分析方法与单学科设计优化相同,但由于多学科设计优化中常常具有多个学科分析模块,各个学科分析模块之间存在着耦合关系,即一个学科分析模块的输入变量可能又是另一个学科的输出变量,因此在进行灵敏度分析,计算学科输入变量对输出变量(本学科或其它学科的学科分析模块输出变量)的影响时通常要涉及到其它学科分析模块,传统的灵敏度计算方法已不能胜任多学科设计优化的要求。另一方面,多学科设计优化中灵敏度分析的变量维数也大大多于单学科设计优化问题,所需的数据量也大为的增加。传统的灵敏度分析方法不能简单地推广到多学科设计优化环境中,因此,在多学科设计优化过程中,使用一种新的灵敏度分析手段成为必然。 九十年代初,Sobieski导出了用于耦合系统灵敏度分析的全局灵敏度方程。GSE 是一种能有效计算相互耦合多学科灵敏度的方法,该方法直接从隐函数原理推导而来,精确性较高。Sobieski导出的算法有两种,一种是基于每个学科分析模块残数的导数;一种是基于各个学科分析模块输出对其输入的导数。其中,以第二种方法应用的最为广泛,首先,各个学科独立的完成各自的灵敏度计算,然后集成分析计算全局灵敏度。多学科设计优化的灵敏度分析的作用主要在于跟踪学科之间相互影响的功能,判断耦合性的大小。同时,在一些多学科设计优化方法中,通过全局灵敏度方程得到的全导数被用来对状态变量进行近似处理。 除了以上介绍的灵敏度分析方法外,另外一种灵敏度分析方法是采用神经网
控制网优化设计
控制网优化设计 一、GPS 卫星定位的基本原理 GPS 定位时,把卫星看成是“飞行”的已知控制点,利用测量的距离进行空间后方交会,便得到接收机的位置。卫星的瞬时坐标可以利用卫星的轨道参数计算。 二、在进行载波相位观测时,在不同观测时段,载波可以划分为哪几部分? 首次观测值0 0)(~φ?Fr = 后继量测值)()(~φφ? Fr Int += 通常表示为)()(~0 0φφ?Fr Int N N ++=+=Φ 三、坐标系之间的转换过程 四、GPS 网数据处理的基本过程 1、数据传输 2、建立坐标系统 1)打开TGO 软件,功能—Coordinate System Manager ,进入坐标系统管理器。 2)增加椭球,输入椭球名称、长半轴、扁率 3)增加基准转换(Molodensky ),创建新的基准转换组。 4)增加坐标系统组 5)选择投影方式:横轴墨卡托投影 6)文件保存退出 3 、新建项目 1)新建项目 2)选择模板(Metric 米制单位模板). 3)改变坐标系统,选择需要的坐标系统。 4、导入静态观测数据(*.dat 或RINEX)数据 1)文件/导入 2)修改测站名,天线高度,天线类型,测量方法。 5、处理Timeline 6、处理GPS 基线 7、GPS 网的无约束平差 1)平差—基准—WGS-84,进行无约束平差。 2)查看网平差报告。看迭代平差是否通过;如果不通过,选择“交替的”加权策略 3)再次进行平差,直到通过为止。 8、网的约束平差 1) 平差—基准—当地投影基准。 2)然后点击观测值,加载水准面模型,输入已知点坐标。 3)点击平差,进行网的约束平差。 9、成果输出 五、GPS 控制网优化设计的分类处理方法 零类设计:即控制网的基准设计,是对一个已知图形结构和观测方案的自由GPS 网确
给水管网优化设计研究综述
1999年6月第15卷第2期 陕西工学院学报 JOURNAL OF SHAANXI INSTITU TE OF TECHNOLO GY J une 11999Vol 115 No 12【文章编号】1002-3410(1999)02-0046-04 给水管网优化设计研究综述3 王晓峰 (陕西师范大学旅游与环境学院99#,陕西西安 710062) 【摘 要】 本文详细叙述了给水管网优化设计国内、外的研究现状,针对目前研究中存在的一些问题,作者提出了一些观点和解决问题的办法,和读者共同探讨。 【关 键 词】 给水管网; 优化设计; 综述 【中图分类号】 TU991.32 【文献标识码】 A 收稿日期:1999-03-13 作者简介:王晓峰(1972— ),男,陕西师范大学助教。3陕西省第二农业区开发项目:陕农发(1989)25号 1 前 言 给水管网是给水设计的重要组成部分,在该系统中,管网的投资很高。因此,人们对管网设计以使其产生最大的经济效益。然而,给水管网设计的任务是艰巨而复杂的。在设计过程中涉及到大量的需要认真考虑的相关因素。如今,优化设计更趋艰难,主要是因为在设计过程中,要将费用效益及可靠性同步考虑。其复杂性通过以下几个因素来体现:(1)决策变量的离散性(如有效经济管径);(2)与管材、劳动力、管道布置和开挖等费用有关的复杂离散函数;(3)设计中涉及到的多种需水量荷载形式;(4)在加压系统中,为了计算能量费用所需管道流量及压力方面的一系列知识。 2 研究现状 自从20世纪60年代人们就开始用系统分析方法设计给水管网,并将优化程序应用于其中。最早的给水管网设计模型是为树状网设计的,如Karmeli et al (1968)、Schaake 和Lai (1969)。这些模型没有考虑类似阀门的附属物,但根据水力特性说明了其影响。其它非线性模型在当时也被提出,如Schaake 和Lai (1969)。以上这些模型仅用于树状网系统,没有线性规划法的计算优势,不能得出比较好的结果。1977年Alperovits 和Shamir 提出了一个基本线性规划公式的、能引入任何理论和产生实际兴趣的第一个环状系统模型,其中使用了保证环状网水力连续性的附加约束(如围绕环的水头损失代数和等于零),这说明线性规划法具有强大的实用性。在1979年Quindry et al.对该模型进行了修正。 自从20世纪70年代以来,大量的管网优化设计技术被相继提出。Walski (1985)、Walters (1988)以及G oulter (1992)在他们的论文中提出了最中肯最有发展前途的建议。Alperovit 和Shamir (1977)应用梯度搜索法得出给水系统中满足最小总费用的流量形式Quindryal et al (1981)用两阶段法设计给水管网。在优化结构中,两阶段法在模型中的使用代表了管网优化
多学科优化
摘要:工程系统近年来变得相当大和复杂。所要求的设计相当复杂并且仅仅考虑一个学科的话不容易满足设计要求。因此,需要考虑到不同学科的设计方法。多学科设计优化是考虑到多学科设计环境所形成的优化方法。MDO包含七中方法。他们是多学科可行方法MDF,单学科可行方法IDF,同时运行方法AAO,并行子空间优化方法CSSO,合作优化CO,错落综合系统合成方法BLISS,基于子空间的多学科优化MDOIS.通过几个数学例子,方法的性能可以得到评估和比较。用于比较所定义的具体要求和新的数学问题类型是根据要求所定义的。所有的方法被编码并且可以在数量和质量上比较方法的性能。 1.简介 目前,工程系统都是相当大而且复杂的。对于这类系统,设计要求是严苛的。因此,设计工程师正在寻求新的方法,其中之一是多学科设计优化(MDO;Balling 和Sobieszcznski-Sobieski在1996提出)。MDO是一种设计优化方法。一般来说,优化在实施时,仅仅只考虑到了一门学科。然而,用单一的学科去解决现代工程问题是相当困难的。因此,我们需要一种可以覆盖多学科的设计方法。 在Sobieszczanski-Sobieski于1998年提出并行子空间优化之后,其他的几种方法也被相继提出来。多学科设计优化方法分为单级方法和多级方法。单级方法一般有一个单一的优化程序并且直接使用非层次结构。以下这些方法就是属于单级方法,其中包括多学科可行法(MDF;Cramer等在1993年提出)、独立学科可行法(IDF;Cramer等在1993年提出;Lee在2004年提出)、All-at-once (AAO;Cramer等在1993年提出;Haftka在1985年提出)和基于独立子空间的多学科优化(MDOIS;Park在2007年提出;Park和Shin在2005年提出)。 在单级方法下,除了MDOIS以外,所有的学科都不能决定设计,并且分析只在学科之间进行。在MDOIS情况下,各个学科都决定了设计。另一方面,多级方法能够将非层次的机构关系转化为层次结构而且每个层次都有优化程序。这些多级方法包括并行子空间优化(CSSO,Park和Lee在2001年提出;Renaud 和Gabriele在1994年提出;Sobieszczanski-Sobieski在1982年提出;Tappeta 在1998年提出)、双极集成系统合成(BLISS;Sobieszczanski-Sobieski在1998
失控读书笔记
失控读书笔记 【篇一:《失控-人类的最终命运和结局》读后感】 《失控—全人类的最终命运和结局》 读后感 一班钟超 《失控》可以说是1990年面世的最伟大的一本书,用着超前的眼 光系统的阐述了很多让我们为之惊叹的领域。《失控》中涉及到的 学科无所不包,其中,让我比较印象深刻的一些知识是生物学、进 化论、分布式、生态学、电子货币、收益递增定律、预言机以及其 中的大总结九律。 生物学:《失控》里有一个让我惊骇的预言是,机械会具有生物特性,人工生命会失去控制成为世界的未来,机械可以生物化,生物 也将机械化。我也幻想如果把我骨骼都换成坚硬的金属,那么我会 变得更加powerful,或者把我的大脑移植到机器人身上,我还是我,只是我的身体换了。或许一天会实现吧。 进化论:我们一直在学校接受达尔文进化论的思想,孰不知这不过 是进化论的一个重要分支,但不是进化论的全部。另外达尔文理论 的一个弱点:“达尔文曾经主动提供过一个实例来说明他的理论所遇 到的困难,就是高度复杂的人眼。设计精巧且相互作用的晶状体、 虹膜、视网膜等结构,看起来确实挑战了达尔文那种“轻微、累进的”随机改进机制的可信度。没有进化完全的眼睛中,真不知道某些部 分会有什么用。” 进化是什么?进化是什么样子的?为什么会有的生物可以进化成能 适应环境,有的生物又没有进行这种进步式的进化呢?达尔文进化 论只告诉我们优胜劣汰,但是没告诉我为什么有这些差别。 分布式:蜂群意识是自然界的分布式,蜜蜂,或者蚂蚁,或者你我 的生命,群氓却有集体的智慧,仿佛有一只看不见的手让智能“涌现”出来。但是群体不是最优的,也不可控,不可预测,不可控,非即刻。 群氓的智慧太深奥,放任失控,如何利用?我有时候觉得现在 web2.0的ugc有一点集体智慧的意思,或者一个社会的管理,是否 放任失控才能发展得更好? 生态学:《失控》里讲了很多关于生态圈二号的这项实验。生态圈 二号犹如一个微型的地球,它的建立和维护让人类知道地球的一切
HEEDS多学科优化方案
多学科设计优化 HEEDS ? MDO——多学科设计优化软件 多学科 不论是结构问题(线性或非线性,静态或动态,散装材料或复合材料)、流体问题、热力学问题,或者声学问题、NVH问题、动力学问题以及同时存在以上几项问题,HEEDS MDO都可以帮助用户寻找最佳解决方案。 易于使用的界面 虽然HEEDS MDO使用的技术很复杂,但是软件用户界面友好。它特有的选项卡界面可以使用户明确项目建立和执行的六个过程。 与诸多CAE工具的连接 HEEDS MDO与所有常用的CAE应用软件均有接口,使设计优化过程自动化。它还能调用多种软件工具进行前处理,后处理,分析计算和多学科优化。HEEDS MDO为以下工具提供输入和输出接口: ?Abaqus ?ANSYS WB ?Excel ?LS-DYNA ?Nastran
?NX ?Solidworks ?SW Simulation 另外,HEEDS MDO提供一种通用接口生成ASCII格式的输入输出文件,从而可以连接所有商业或者私有CAE工具。如果您不确定您的工具是否与HEEDS MDO兼容,可以联系我们。 独有的优化技术 HEEDS MDO默认的研发方式-SHERPA采用多重研发策略,可以动态和实时的随着优化范围的变化调整针对问题的研发方式。用户可以利用HEEDS软件进行众多的分析,快速确定优化空间,省去了众多的试验费用及时间;从大量的模型参数中提取出敏感参数,并对敏感性参数进行评估;对模型的健壮性和可靠性进行评估。通过对模型参数的优化,达到减少模型质量与成本的目的。 通过HEED优化分析,车身减重33.5kg
并行优化技术 HEEDS PARALLEL通过同时提交多个方案给不同的处理器,提高优化速度,且速度提高与硬件及软件资源几乎是线性的关系。 典型应用 BD公司:使用HEEDS MDO结合有限元方法对医疗器械设计进行优化和评估。 PRATT & MILLER:使用HEEDS MDO优化军用重型汽车底盘组件参数,为赛车优化齿轮速比,优化赛车悬挂系统的球形连接头。