材料成型原理(读书报告)

3D 打印技术及其发展趋势
3D 打印(3D Printing )技术作为快速成型领域的一种新兴技术,目前正成为一种迅猛发展的潮流,引起了国内外新闻媒体和社会公众的广泛关注。2011年2月,英国《经济学人》杂志刊载的封面文章,对3D 打印技术的发展作了简要介绍和展望,文章认为:3D 打印技术未来的发展将使大规模的个性化生产成为可能,这将会带来全球制造业经济的重大变革。更有新闻媒体乐观地认为:3D 打印产业将成为下一个具有广阔前景的朝阳产业。由此可见,了解3D 打印技术的相关知识及其未来发展对我们学习先进成型技术、掌握新材料和新成型技术的市场需求及发展具有重要意义。
一、3D 打印技术简介
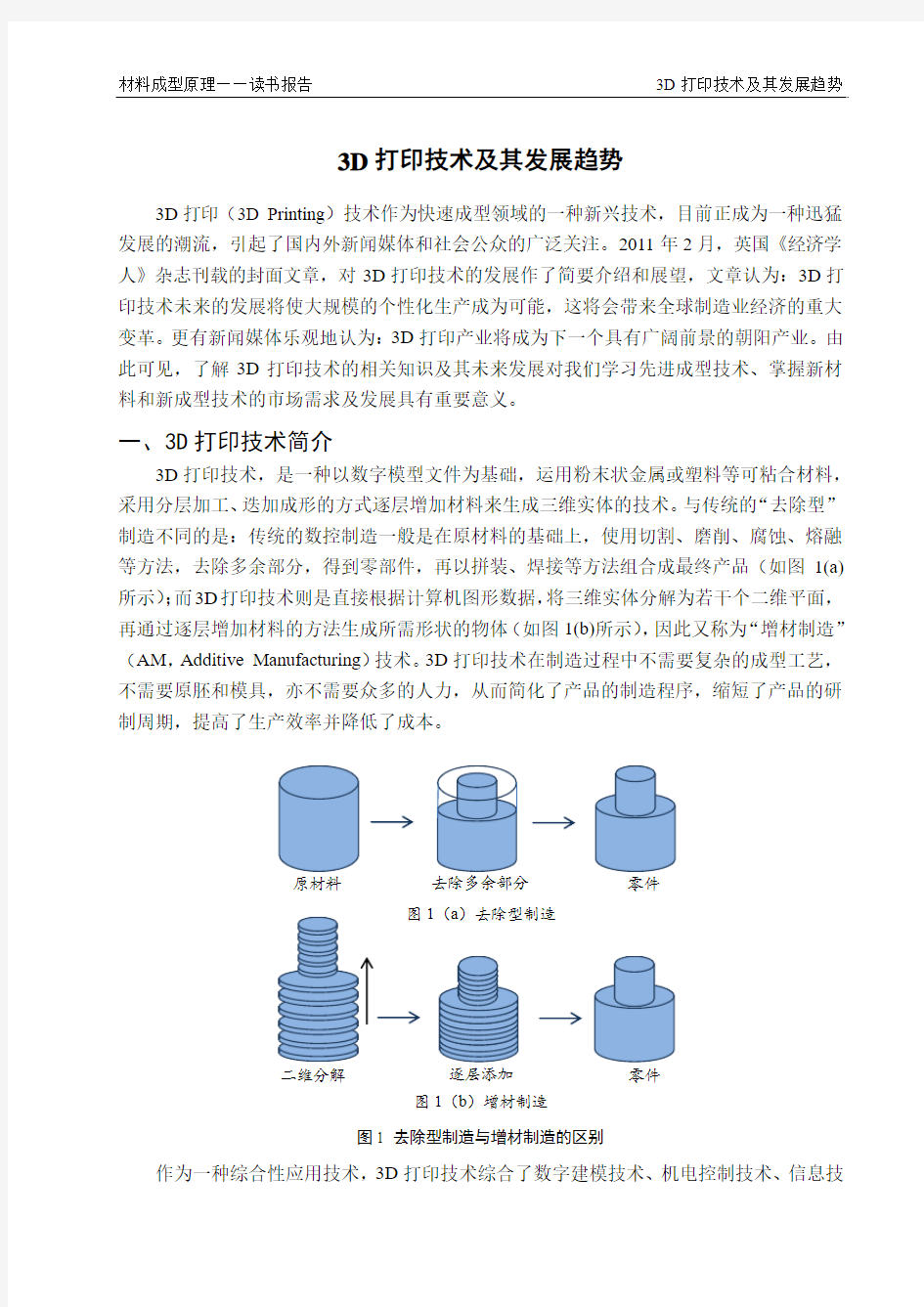
3D 打印技术,是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,采用分层加工、迭加成形的方式逐层增加材料来生成三维实体的技术。与传统的“去除型”制造不同的是:传统的数控制造一般是在原材料的基础上,使用切割、磨削、腐蚀、熔融等方法,去除多余部分,得到零部件,再以拼装、焊接等方法组合成最终产品(如图1(a)所示);而3D 打印技术则是直接根据计算机图形数据,将三维实体分解为若干个二维平面,再通过逐层增加材料的方法生成所需形状的物体(如图1(b)所示),因此又称为“增材制造”(AM ,Additive Manufacturing )技术。3D 打印技术在制造过程中不需要复杂的成型工艺,不需要原胚和模具,亦不需要众多的人力,从而简化了产品的制造程序,缩短了产品的研制周期,提高了生产效率并降低了成本。
作为一种综合性应用技术,3D 打印技术综合了数字建模技术、机电控制技术、信息技图1(a )去除型制造
原材料
零件
二维分解 逐层添加
零件
图1(b )增材制造 图1 去除型制造与增材制造的区别
术、材料科学与化学等诸多方面的前沿技术知识,具有很高的科技含量。其核心装备是3D 打印机——它是集机械、控制及计算机技术等为一体的复杂机电一体化系统,主要由高精度机械系统、数控系统、喷射系统和成型环境等子系统组成。此外,新型打印材料、打印工艺、设计与控制软件等也是3D打印技术体系的重要组成部分。
3D打印技术可使用的材料种类非常丰富,例如以沙子为材料可打印建筑;以玻璃为材料可打印玻璃制品;以金属为材料可打印机械零件等。同时3D打印技术还可以在很大程度上提高制作效率和精密程度。目前,3D打印技术主要应用于产品模型、模具制造、文化创意、航空航天、生物医疗、艺术创作以及个性化定制等领域,以替代这些领域传统依赖的精细加工工艺。此外,在生物工程与医学、建筑、服装等领域,3D打印技术的引入也为创新开拓了广阔的空间。
二、3D打印技术的过程及原理
众所周知,我们日常生活中所使用的普通打印机以墨水和纸张为打印材料可以打印出电脑设计的二维平面图像及文字。而3D打印机的工作原理则参照了普通打印机的技术原理,其分层加工的过程与喷墨打印十分相似,只是二者的不同之处主要在于其打印材料不同——3D打印机的打印材料是金属、陶瓷、塑料、砂等实实在在的原材料,打印机与计算机连接后,打印机在计算机的控制下利用快速成型技术将“打印材料”一层一层叠加起来,最终把计算机上的蓝图变成实物。简而言之,所谓3D打印技术就是可以打印出真实的三维物体的一种技术。
2.1 3D打印技术的过程
3D打印技术的实现主要分为四步,即三维设计、切片处理、三维打印和产品后处理。
1、三维设计
作为一种新兴的高技术数字化加工方式,3D打印离不开数据的驱动。而三维数据的获得则是根据需要,利用计算机辅助设计软件如3DMAX、PRO/E等设计出产品的数字化三维模型。模型创建可根据创意理念或是具体的产品尺寸进行设计,在对已有实物仿制时,还可以借助近几年来迅速发展起来的反求技术采集已有实物的空间三维数据,再以此在计算机辅助设计软件上重建产品的三维模型。
2、切片处理
3D打印的工作原理是分层累加,故必须对模型进行离散化处理。用一族密集的平行平面切分三维模型,得到一层层交线,由于模型是实体,故每一条交线应该是封闭的环,称之为轮廓线。切平面间是密集的,相互之间的距离越接近,最终成品的精度越高,但与之对应的是数据的急剧增大,数据处理的时间会成倍增加。而在实际应用中,通常需要兼顾材料特性、零件精度和处理时间,目前,常用的3D打印机的精度多在0.005mm~0.1mm 之间的。
3、三维打印
打印过程中,打印机通过读取文件中的横截面信息,用液体状、粉状或片状的材料将这些截面逐层地打印出来,再将各层截面以各种方式粘合起来从而制造出一个实体。这种技术的特点在于其几乎可以造出任何形状的物品。
4、产品后处理
介于目前3D 打印技术的发展水平,通过3D 打印机打印的零件大多不能直接使用,还必须经过一定的后续处理才能满足工况要求,如去除支撑材料、打印件的手续烧结处理等。
2.2 3D 打印技术的成型原理
3D 打印技术是利用普通打印机的原理,将打印机和计算机连接起来,把原料装入机身,通过计算机的控制,利用快速成型技术将原料一层一层累积起来,最后将计算机上的蓝图变成实物。目前实现3D 打印的快速成型技术多种多样,应用最多的主要有以下四类:
1、选择性激光烧结成型(SLS )
选择性激光烧结法又称为选区激光烧结,它的原理(如图2所示)是:预先在工作台上铺一层粉末材料(金属粉末或非金属粉末),激光在计算机控制下,按照界面轮廓信息,对实心部分粉末进行扫描,被激光扫描部分的粉末烧结在一起,得到零件的截面,并与下面已成形的部分粘接为一体,;当一层截面烧结完后,再铺上新的一层材料粉末,选择地烧结下层截面,如此不断循环,层层堆积,最终获得所需三维实体。
2、激光光固化成型(SLA )
光固化是指单体、低聚体或聚合体基质在光的诱导下发生固化的过程。激光光固化成型的工作原理(如图3所示)是:采用特定波长与强度的紫外线激光束,按计算机切片软件所得到的每层薄片的二维图形轮廓轨迹,对液态光敏树脂进行扫描,使之由点到线,由线到面顺序凝固,从而构成模型的一个薄截面轮廓;在完成一个层面的绘图作业后,将升降台在垂直方向移动一个层片的高度,再固化另一个层面,这样层层叠加最后构成一个三维实体。
图2 选择性激光烧结成型的原理图
3、熔融沉积造型(FDM )
熔融沉积造型的工作原理类似于标花蛋糕的制作(如图4所示)。熔融沉积造型采用热熔喷头,丝状热塑性材料由供丝机构送进喷头,在喷头中加热到熔融态。熔融态的材料被挤压出来,按照计算机给出的截面轮廓信息,随加热喷头的运动,选择性地涂覆在工作台的制件基座上,并快速冷却固化。一层完成后喷头上升一个层高,再进行下一层的涂覆,如此循环,最终形成三维产品。
4、三维打印技术(3DP )
三维打印技术与SLS 工艺类似,采用粉末材料成形,如陶瓷粉末,金属粉末(如图5所示)。所不同的是三维打印过程中材料粉末不是通过烧结连接起来的,而是通过喷头用粘接剂(如硅胶)将零件的截面“印刷”在材料粉末上面。成型过程中,首先在工作台上均匀地铺上一层粉末材料,接着打印头(喷头)将按照零件截面形状,把粘结材料选择性地喷射到已铺好的粉末层上,使零件截面实体区域内的粉末材料粘接在一起,从而形成截面轮廓;一层打印完后工作台下移一定高度,然重复上述过程,如此循环逐层打印直至工件完成。由于用粘接剂粘接的零件强度较低,通常还须后处理。
图3 激光光固化成型的原理图
图4 熔融沉积造型的原理图
三、3D 打印技术的特点
3D 打印与传统模型加工制造相比,有以下优势:
1、打印的零件精度高。目前市面上的主流3D 打印机的精度基本都可以控制在0.3r am 以下。这种精度对于一般产品需求来说是足够的。
2、产品制造周期短,制造流程简单。3D 打印技术省去了传统工艺模具设计与制作等工序,直接从CAD 软件的三维模型数据得到实体零件,生产周期大大缩短,也简化了制造流程,节约制模成本。
3、可实现个性化制造。3D 打印一般通过计算机建模实现设计,很容易在尺寸、形状和比例上做修改,并且这些修改都是实时的,为制作个性化产品提供了极大便利。另一方面,利用计算机建模能得到一些传统工艺不能得到的曲线,这将使3D 打印产品拥有更加个性的外观。
4、制造材料的多样性。通常一个3D 打印系统可以使用不同材料打印,如金属、石料、塑料等,从而满足不同领域的需要。
5、可完成一些相对复杂的零件。弥补了传统加工工艺的不足。
但3D 打印技术要进一步扩展其产业应用空间,仍面临着多方面的瓶颈和挑战:
1、成本较高。现有3D 打印机造价普遍较为昂贵,今年虽然多家公司推出了廉价3D 家用打印机( 1000美元以下),但是苦于打印材料价格高居不下,导致总体成本偏高。
2、打印材料限制。目前3D 打印的成型材料多采用化学聚合物,选择的局限性较大,成型品的物理特性较差,而且安全性也存在一定隐患。
3、精度、速度和效率方面。目前3D
打印成品的精度还不尽如人意,打印效率还远不图5三维打印技术的原理图
适应大规模生产的需求,而且受打印机工作原理的限制,打印精度与速度之间存在严重冲突。
4、打印零件尺寸限制。目前的3D打印机并不能实现大尺寸零件的制造。
5、产业环境面。3D打印技术的普及将使产品更容易被复制和扩散,制造业面对的盗版风险大增,现有知识产权保护机制难以适应产业未来发展的需求。
四、3D打印技术的发展趋势
近年来3D打印技术持续发展,成本的大幅降低使其已经从研发的小众空间向主流市场进军,发展势头不可阻挡,并成为了社会广泛关注、民用市场迅速崛起的新领域。但Gartner公司2011年发布的最新技术发展展望报告判断:3D打印技术目前正在进入概念炒作的高峰阶段,其技术还有待充分成熟,主流市场也有待进一步培育。随着智能制造的进一步发展成熟,新的信息技术、控制技术、材料技术等不断被广泛应用到制造领域,3D 打印技术也将被推向更高的层面。因此,现阶段产业界对3D打印领域的投入应以加强创新研发、技术引进为主,重视自主知识产权的建设和维护,争取在未来的市场竞争中占据优势地位。
未来,3D打印技术的发展将体现出精密化、智能化、通用化以及便捷化等主要趋势,综合起来可以从以下几方面进行改善:
1、提升3D打印的速度效率和精度,开拓并行打印、连续打印、大件打印、多种材料打印的工艺方法,提高成品的表面质量、力学和物理性能,以实现直接面向产品的制造。
2、可开发更为多样的3D打印材料,如智能材料、功能梯度材料、纳米材料、非均质材料及复合材料等,特别是金属材料直接成型技术。
3、3D打印机可以向双色或多色打印机发展,同时进行两种以上颜色的渲染,得到更有层次和立体感的打印模型。
4、3D打印机的体积小型化、桌面化,成本更低廉,操作更简便,更加适应分布化生产,设计与制造一体化的需求以及家庭日常应用的需求。
5、软件集成化。实现CAD/CAPP/RP的一体化,使设计软件和生产控制软件能够无缝对接,实现设计者直接联网控制的远程在线制造。
6、拓展3D打印技术在生物医学、建筑、车辆、服装等更多行业领域的创造性应用。
参考文献
[1]吴平.3D打印技术及其未来发展趋势.印刷质量与标准化,2014(1).
[2]杨恩泉.3D打印技术对航空制造业发展的影响.航空科学技术,2013(1).
[3]王月圆,杨萍.3D打印技术及其发展趋势.印刷杂志,2014.
[4]王雪莹.3D打印技术与产业的发展及前景分析.中国高新技术企业,2012(26).
[5]钱波.快速成型制造关键工艺的研究.华中科技大学,2009.
[6]张柏林.试析“3D打印技术”的优点与局限.自动化技术与应用,2013(32).
[7]古丽萍.蓄势待发的3D打印机及其发展.数码印刷,2011(10).
[8]刘厚才.三维打印快速成型技术及其应用.机械科学与技术,2008(9).
[9]陈步庆.三维打印技术及系统研究.机电一体化,2005(4).
[10]Barry Berman.3-D printing: The new industrial revolution.Business Horizons,2012, 55(2):155-162.
[11]Thomas A.3D printing of multifunctional nanocomposites.Nano Today,2013,8(2):119-120.
[12]Anton J.M.A global sustainability perspective on 3D printing technologies.Energy
Policy,2014,74:158-167.
[13]Jeremy Straub.Utilizing in-situ resources and 3D printing structures for a manned Mars
mission.ActaAstronautica, 2015,107:317-326.
[14]Susanne Christ, Martin Schnabel, et al. Fiber reinforcement during 3D printing.Materials Letters,
2015,139(15):165-168.
[15]Xianglu Dai, HuiminXie.Constitutive parameter identification of 3D printing material based on the
virtual fields method.Measurement,2015,59:38-43.
[16]Weijie Zhang, Qin Lian et a.The effect of interface microstructure on interfacial shear strength for
osteochondral scaffolds based on biomimetic design and 3D printing.Materials Science and Engineering, 2015,46:10-15.
[17]S.S. Bobby.Influence of Moisture in the Gypsum Moulds Made by 3D Printing.Procedia Engineering,
2014,97:1618-1625.
[18]James Hyde,et al.The use of three-dimensional printing to produce in vitro slice chambers.Journal of
Neuroscience Methods, 2014, 238:82-87.
[19]Graham Gagg.Effects of sintering temperature on morphology and mechanical characteristics of3D
printed porous titanium used as dental implant.Materials Science and Engineering, 2013, 33(7): 3858-3864.
[20]W. Otten,et al.Combining X-ray CT and 3D printing technology to produce microcosms with replicable,
complex pore geometries.Soil Biology and Biochemistry,2012, 51:53-55.
[21]Vivian K. Lee, et al.The integration of 3-D cell printing and mesoscopic fluorescence molecular
tomography of vascular constructs within thick hydrogel scaffolds.Biomaterials, 2012, 33(12):5325-5332.[22]Carlos F.L. et al.Design and production of sintered β-tricalcium phosphate 3D scaffolds for bone tissue
regeneration.Materials Science and Engineering,2012,32(5):1293-1298.
[23]Natalja E,et al.Organ printing: the future of bone regeneration.Trends in Biotechnology,
2011,29(12):601-609.
[24]Hod Lipson. Why 3D printing is set to change how we live.New Scientist,2011,21(2823):77-89.
[25]Shih-FengLan.Alginate based 3D hydrogels as an in vitro co-culture model platform for the toxicity
screening of new chemical entities.Toxicology and Applied Pharmacology, 2011,256(1):67-72.
[26]Michel Jordan, et al. Artwork 3D model database indexing and classification.Pattern
Recognition,2011,43(1):588-597.
通信原理课程设计报告书
通信原理课程设计 题目:脉冲编码调制(PCM)系统设计与仿真 院(系):电气与信息工程学院 班级:电信04-6班 姓名:朱明录 学号: 0402020608 指导教师:赵金宪 教师职称:教授
摘要 : SystemView 仿真软件可以实现多层次的通信系统仿真。脉冲编码调制(PCM )是现 代语音通信中数字化的重要编码方式。利用SystemView 实现脉冲编码调制(PCM)仿真,可以为硬件电路实现提供理论依据。通过仿真展示了PCM 编码实现的设计思路及具体过程,并加以进行分析。 关键词: PCM 编译码 1、引言 随着电子技术和计算机技术的发展,仿真技术得到了广泛的应用。基于信号的用于通信系统的动态仿真软件SystemView 具有强大的功能,可以满足从底层到高层不同层次的设计、分析使用,并且提供了嵌入式的模块分析方法,形成多层系统,使系统设计更加简洁明了,便于完成复杂系统的设计。 SystemView 具有良好的交互界面,通过分析窗口和示波器模拟等方法,提供了一个可视的仿真过程,不仅在工程上得到应用,在教学领域也得到认可,尤其在信号分析、通信系统等领域。其可以实现复杂的模拟、数字及数模混合电路及各种速率系统,并提供了内容丰富的基本库和专业库。 本文主要阐述了如何利用SystemView 实现脉冲编码调制(PCM )。系统的实现通过模块分层实现,模块主要由PCM 编码模块、PCM 译码模块、及逻辑时钟控制信号构成。通过仿真设计电路,分析电路仿真结果,为最终硬件实现提供理论依据。 2、系统介绍 PCM 即脉冲编码调制,在通信系统中完成将语音信号数字化功能。PCM 的实现主要包括三个步骤完成:抽样、量化、编码。分别完成时间上离散、幅度上离散、及量化信号的二进制表示。根据CCITT 的建议,为改善小信号量化性能,采用压扩非均匀量化,有两种建议方式,分别为A 律和μ律方式,我国采用了A 律方式,由于A 律压缩实现复杂,常使用 13 折线法编码,采用非均匀量化PCM 编码示意图见图1。 图1 PCM 原理框图 下面将介绍PCM 编码中抽样、量化及编码的原理: (a) 抽样 所谓抽样,就是对模拟信号进行周期性扫描,把时间上连续的信号变成时间上离散的信号。该模拟信号经过抽样后还应当包含原信号中所有信息,也就是说能无失真的恢复原模拟信号。它的抽样速率的下限是由抽样定理确定的。 (b) 量化 从数学上来看,量化就是把一个连续幅度值的无限数集合映射成一个离散幅度值的有限数集合。如图2所示,量化器Q 输出L 个量化值k y ,k=1,2,3,…,L 。k y 常称为重建电
线性系统理论大作业小组报告-汽车机器人建模
审定成绩: 重庆邮电大学 硕士研究生课程设计报告 (《线性系统理论》) 设计题目:汽车机器人建模 学院名称:自动化学院 学生姓名: 专业:控制科学与工程 仪器科学与技术 班级:自动化1班、2班 指导教师:蔡林沁 填表时间:2017年12月
重庆邮电大学
摘要 汽车被广泛的应用于城市交通中,它的方便、快速、高效给人们带来了很大便利,这大大改变了人们的生活. 研制出一种结构简单、控制有效、行驶安全的城市用无人智能驾驶车辆,将驾驶员解放出来,是大大降低交通事故的有效方法之一,应用现代控制理论设计出很多控制算法,对汽车进行控制是非常必要的,本文以汽车机器人为研究对象,对其进行建模和仿真,研究了其模型的能控能观性、稳定性,并通过极点配置和状态观测器对其进行控制,达到了一定的性能要求。这些研究为以后研究汽车的自动驾驶和路径导航,打下了一定的基础。 关键字:建模、能控性、能观性、稳定性、极点配置、状态观测器
目录 第一章绪论 (1) 第一节概述 (1) 第二节任务分工 (2) 第二章系统建模 (2) 2 系统建模 (2) 2.1运动学模型 (2) 2.2自然坐标系下模型 (4) 2.3具体数学模型 (6) 第三章系统分析 (7) 3.1 能控性 (7) 3.1.1 能控性判据 (7) 3.1.2 能控性的判定 (8) 3.2 能观性 (10) 3.2.1 能观性判据 (10) 3.2.2 能观测性的判定 (12) 3.3 稳定性 (13) 3.3.1 稳定性判据 (13) 3.3.2 稳定性的判定 (14) 第四章极点配置 (15) 4.1 极点配置概念 (15) 4.2 极点配置算法 (15) 4.3 极点的配置 (16) 4.4 极点配置后的阶跃响应 (17) 第五章状态观测器 (18) 5.1概念 (19) 5.2带有观测器的状态反馈 (20) 5.3代码实现 (21) 5.4 极点配置和状态观测器比较 (23)
线性系统理论Matlab实践仿真报告
线性系统理论Matlab实验报告 1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具 有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。 (1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控; 判断能控程序设计如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; Qc=ctrb(A,B) Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 Rc=rank(Qc) Rc =2 Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。 (2)求取状态反馈器中的K,设的期望特征根为-7,-9; 其设计程序如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; P=[-7 -9]; k=place(A,B,P) k = 1.0e+003 * -0.0200 9.0000 0.0072 -0.4500 程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。 2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
任正非《华为执行力》读后感
---------------------------------------------------------------范文最新推荐------------------------------------------------------ 任正非《华为执行力》读后感 没有任何借口体现的是一种负责、敬业的工作精神,一种服从、诚实的工作态度。下面是小编为大家整理的读《华为执行力》有感,供大家参考。 【篇一】读《华为执行力》有感 我们正处在产业升级和机构改革的关键时期,执行力是否到位势必影响我们改革发展的成果和企业的生死存亡。下面我结合自己的实际工作谈谈在企业执行力方面的学习体会。 一,按质按量践行执行力,让企业战略落到实处 新时期新形势下,钢城公司的党建工作突出抓好党建促经济,抓好经济促发展为重点,推动企业各项工作的发展,确实有效地做到服务生产,服务人民群众。我们在工作中要求党员起到先锋模范作用,作为提升执行力的有力抓手,按质按量及时完成自己的工作任务。 以此同时我们注重培养积极肯干,表现优秀的团员,争取让他们早日加入党组织,选拔他们到合适重要的岗位上。 在机器设备维护方面,要求操作者严格遵守操作规程和日常维护制度,并定期检查调试机床设备,把指标分解到每一个机床负责人,形成考核绩效机制。近期,机床故障率明显下降,保养维护工作明显好转。 二,有的放矢提升执行力,让企业管理发挥实效虽然我们在以往 1 / 21
的工作中已经试图提升企业的执行力,但是相较于那些出色的公司和国际化的企业, 我们的缺陷与不足是显而易见,触目惊心的!无论是人员的执行意识,流程机制,执行文化,更不用说成套的培养与保障模式。在中国,华为是执行力创造商业王国的一个典范,甚至有人这样形容任正非的成功:偏执狂+执行力! 相较于华为,我们国企与集体性质的企业,缺乏危机感、功臣意识,元老文化盛行,这些都影响了整个企业的执行意识,脱离了剧烈竞争的市场经济。 而且在这个信息极易扩散的年代,固步自封缺乏集体合作和有效的执行力,随时都有可能成为狼群待宰的羔羊。 三,形成良好的执行文化,让企业拥有更强的竞争力 任正非的华为,能够拥有如此强大的执行力当然离不开14年艰苦的军旅生涯带给他那种强大的信念和锻造出的钢铁意志、执行力和社会责任感!我们不难 发现没有良好企业文化的公司,是很难长久生存下去的,尤其没有关于执行力的企业文化的。我们需要在每一个员工的头脑中根植如履薄冰、如临深渊的危机感,形成与企业共存亡的执行力。 我们在强调执行文化基础性作用的同时,当然不能忽视科学长效的执行流程机制,这有利于使所有公司员工的心往一起走,劲往一块使。比如对机床维护保养的指标下达,就必须落实到个人,必须定期检查,形成绩效机制。
全维状态观测器的设计
实 验 报 告 课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计 评分 批阅教师签字 一、实验目的 1、 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的 极点对状态的估计误差的影响; 2、 掌握全维状态观测器的设计方法; 3、 掌握带有状态观测器的状态反馈系统设计方法。 二、实验内容 开环系统? ??=+=cx y bu Ax x &,其中 []0100001,0,10061161A b c ????????===????????--???? a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时); 绘制系统的输出阶跃响应曲线。 三、实验环境 MATLAB6、5 四、实验原理(或程序框图)及步骤
利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件就是必须对全部状态变量都能进行测量,但在实际系统中,并不就是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。因此要设法利用已知的信息(输出量y 与输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。该模型就称为状态观测器。若状态观测器的阶次与系统的阶次就是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。 设系统完全可观,则可构造如图4-1所示的状态观测器 图4-1 全维状态观测器 为求出状态观测器的反馈ke 增益,与极点配置类似,也可有两种方法: 方法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出k e ; 方法二:就是可 采用Ackermann 公式: []T o e Q A k 1000)(1Λ-Φ=,其中O Q 为可观性矩阵。 利用对偶原理,可使设计问题大为简化。首先构造对偶系统 ???=+=ξ ηξξT T T b v c A & 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可
执行力就是结果读后感
执行力就是结果读后感 执行力就是结果读后感一 对于我们来说,好像这句话真的很重要。甚至比做什么都更加的重要了。因为世界上有太多的机会。但是这么多机会,真正去做的,真正有结果的,真的都很少很少。 而结果,是我们追求的。为了追求,我们需要真正的来说下我们的执行力。 题目是我在一本书上看到的,而这本书,是一个朋友送我的。他自己事业做得很好,最主要的是他看了很多的书,而且还坚持的看书。我说,你为什么还看书,而且老送书。 他说,看书一是为了成长,二是为了寻找更好的方法与成长。 也就是这个朋友,他说,他最喜欢看的是那种可操作的书。 我说,我也是,因为这样子的看了就能用,用了就有效果,我说,这个也是我的性格。 因为我们都是为了一个结果。 看着我们身边,好像很多的人一下不见,都跑到我们的前面去了。如果我们认真的去研究他们,也许可以从他们的性格里得到一个启发。会想着,原来他们性格也是为了结果。 但是我们更多的,也是看到一个一个在为了结果努力执行的人。如果有一个人,他不努力,而做没意义的事情。我觉得,如果他是我身边的人,那么我应该是会引导他去做。引导他去学习。也许他最后没学到东西,那么至少眼界也不一样。 所以,假如我们是这样子的。那么我们要去学习,要走出去。就像我上面的那个朋友一样,说不定就会有一个更好的结果。一直找一直找,总会有更好的结果,说不定就在转角。
所以,要是有个人说,我做网络没赚钱的。我们这个行业不好做的。 也许他刚进入这个行业,也许他已经是这个行业里的老兵了。在这个行业里很多年了。那么我觉得,他要做的就是走出去。因为这个世界很大,比我们想象中的大。 虽然我们没做好,我们身边的人没做好。但是还是有很多的人都做得很好的。 我们所能做的,在这个世界上,还是有很多的机会的。 所以,我们一定要走出去,要去学习。在我们这个行业里,肯定有更多的方法。而我们也要学着,如何把我们目前所做的事情做到最好。或者,是不是有转型的机会。 肯定有很多的机会都是存在的。 上次有个朋友是做拖鞋的,后面也是做得比较的累。他也是去学习。后面,他依然是做鞋子。但是不是拖鞋了。而是做真皮的鞋子。所以,加上他的资源,半年之内就起来。半年赚到的钱,比他之前所赚到几年的钱还要多。 而这个走出去,不是没执行了。更重要是真的执行,不是一个层次的执行,因为结果在那里。我们为什么要执行了。 过程就是精彩,过程就是恩赐。而且还有个美丽的结果。 但是我在这里更想说的是,很多的人,其实他们表面上看,执行力不行。但是真的行。 在很早的时候,有个朋友公司,他们在网络上卖东西,一个月可以卖几百万。但是有个人,他们只靠走关系。他们一年能卖上千万。所以,他在那郁闷。当然,现在不会了。 因为现在他也成长起来了。而成长起来了,他现在自己一年也可以做几千万。 而关于这个成长起来,其实不是他的业绩成长起来的。
通信原理 数字基带传输实验报告
基带传输系统实验报告 一、 实验目的 1、 提高独立学习的能力; 2、 培养发现问题、解决问题和分析问题的能力; 3、 学习matlab 的使用; 4、 掌握基带数字传输系统的仿真方法; 5、 熟悉基带传输系统的基本结构; 6、 掌握带限信道的仿真以及性能分析; 7、 通过观察眼图和星座图判断信号的传输质量。 二、 实验原理 在数字通信中,有些场合可以不经载波调制和解调过程而直接传输基带信号,这种直接传输基带信号的系统称为基带传输系统。 基带传输系统方框图如下: 基带脉冲输入 噪声 基带传输系统模型如下: 信道信号 形成器 信道 接收 滤波器 抽样 判决器 同步 提取 基带脉冲
各方框的功能如下: (1)信道信号形成器(发送滤波器):产生适合于信道传输的基带信号波形。因为其输入一般是经过码型编码器产生的传输码,相应的基本波形通常是矩形脉 冲,其频谱很宽,不利于传输。发送滤波器用于压缩输入信号频带,把传输 码变换成适宜于信道传输的基带信号波形。 (2)信道:是基带信号传输的媒介,通常为有限信道,如双绞线、同轴电缆等。信道的传输特性一般不满足无失真传输条件,因此会引起传输波形的失真。另 外信道还会引入噪声n(t),一般认为它是均值为零的高斯白噪声。 (3)接收滤波器:接受信号,尽可能滤除信道噪声和其他干扰,对信道特性进行均衡,使输出的基带波形有利于抽样判决。 (4)抽样判决器:在传输特性不理想及噪声背景下,在规定时刻(由位定时脉冲控制)对接收滤波器的输出波形进行抽样判决,以恢复或再生基带信号。 (5)定时脉冲和同步提取:用来抽样的位定时脉冲依靠同步提取电路从接收信号中提取。 三、实验内容 1采用窗函数法和频率抽样法设计线性相位的升余弦滚讲的基带系统(不调用滤波器设计函数,自己编写程序) 设滤波器长度为N=31,时域抽样频率错误!未找到引用源。o为4 /Ts,滚降系数分别取为0.1、0.5、1, (1)如果采用非匹配滤波器形式设计升余弦滚降的基带系统,计算并画出此发送滤波器的时域波形和频率特性,计算第一零点带宽和第一旁瓣衰减。 (2)如果采用匹配滤波器形式设计升余弦滚降的基带系统,计算并画出此发送滤波器的时域波形和频率特性,计算第一零点带宽和第一旁瓣衰减。 (1)非匹配滤波器 窗函数法: 子函数程序: function[Hf,hn,Hw,w]=umfw(N,Ts,a)
线性系统理论课程报告
线性系统的坐标变换及其相关特性 坐标变换的概念: 系统坐标变换的几何意义就是换基,即把状态空间的坐标系由一个基底换为另一个基底。 坐标变换的代数表征: 对系统的坐标变换代数上等同于对其状态空间的基矩阵的一个线性非奇异变换。 线性时不变系统的坐标变换的一个状态空间描述: 对(1)式表征的线性时不变系统的状态空间描述,引入坐标变换即线性非奇异变换 ,则变换后的系统系统状态空间描述为: 推导过程如下: 此时,原系统的状态空间描述与变换后的系统的状态空间描述之间的系数矩阵有如下关系: 对线性时不变系统的(1),引入同样的线性非奇异变: x Ax Bu y Cx Du =+=+∑(1)1x p x -=: x Ax Bu y Cx Du =+=+∑(2)11x p x x p x --=?=1111()x p x p Ax Bu p Apx p Bu ----==+=+y Cx Du Cpx Du =+=+11,,,A p Ap B p B C Cp D D --====
换 ,则变换前后的系统的传递函数不变,即成立 。 进而得 基于上述讨论可得出在线性时不变系统变换下系统具有一些特性: (1)对线性时不变系统,不管是系统矩阵还是传递函数矩阵,其特征多项式在坐标变换下保持不变。 (2)对线性时不变系统,系统矩阵A 的特征值在坐标变换下保持不变,而特征向量在坐标变换下具有相同的变换关系,即对 的线性非奇异变换有: 线性时变系统的坐标变换的一个状态空间描述: 对线性时变的状态空间描述(3),引入坐标变换即线性非奇异变换 (4), 为可逆且连续可微,则变换后的状态空间描述为: 推导过程如下: 对 (4) 式两边关于 t 求导得: 1x p x -=()()G s G s =1111111()() [()] ()() G s Cp sI p Ap p B D C p sI p Ap p B D C sI A B D G s -------=-+=-+=-+=1x p x -=1,1,2,3i i v p v i -== : ()() ()()x A t x B t u y C t x D t u =+=+∑(3)()x p t x =()p t ()() ()()x A t x B t u y C t x D t u =+=+(5)()() x p t x p t x =+(6)
二阶倒立摆实验报告
. I 线性系统实验报告 : 院系:航天学院 学号: . .
2015年12月
1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系应用经典力学理论建立系统的动
力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析容主要包括得出原未加控制器时系统的极点分布,系统的能观性,能控性。 3)LQR控制器设计与调节实验 利用线性二次型最优(LQR)调节器MATLAB仿真设计的参数结果对平面二阶倒立摆进行实际控制实验,参数微调得到较好的控制效果,记录实验曲线。 4)改变控制对象的模型参数实验 调整摆杆位置,将摆杆1朝下,摆杆2朝上修改模型参数、起摆条件和控制参数,重复3的容。 3.实验步骤
执行力读书心得精选范文2020
执行力读书心得精选范文2020 执行力读书心得1 执行力》一书的作者通过大量详实而生动的案例为那些意欲构建执行力组织的企业提供了一个很好的实践模板。执行力是决定企业成败的重要因素,是21世纪构成企业竞争力的重要一环。在这个竞争激烈的时代,一个企业的执行力如何,将决定企业的兴衰。 作者通过对长期以来的绩优公司以及最新崭露头角的企业发展研究,它们之所以得以成功,是因为他们具有较强的执行力组织。《执行力》概括阐述了那些经得起严峻挑战的企业组织内部的共同点是:建立了一种执行力文化,组织的薪酬设计更多的是与业绩联系起来,在执行力组织中,人员、战略、运营三个核心流程是紧密连接在一起的,通过制定周密、详细的计划去实现该组织的战略目标,在这个过程中突出强调要具有求实、实干、协作的精神。新经济理论以成长为先,以愿景为贵。当今的各大企业并不缺乏经营理念和思想决策,可看了《执行力》一书中众多事例表明在企业运营中永立不败之地的企业确实还太少,它们缺的只是执行力文化。 执行力文化,很大一部分人会误以为是“服从”文化。其实这样的思想是错误的。执行力是一种纪律。执行力文化并不只是靠你或我的力量就能够建立起来。它是策略的根本。而是要全员参与进来,大家都朝着共同的目标奋斗,保持始终不逾的精神。我们不难得出:执行力就是一个企业、一个组织的竞争优势,具体说就是一个企业或一个组织如何配置自身现有的人力资源、财力资源、物力资源,最终实
现组织战略目标的策略。 作者在书中提到过的许多企业、组织成功的秘诀给我的启示:首先,领导者制订了非常明确的奋斗目标和战略路线,也会同时考虑自己的行为将影响到员工更好的执行任务,在工作过程中他们都很好的扮演引导的角色,为员工创造良好的执行氛围。领导者要全面的了解企业,了解员工心态。知道企业组织每天在做什么,下属每天都做了些什么,各项工作任务进行的如何,在实施目标过程中是否遇到困难,是否已有解决的办法,成功的领导者总是知道适时的与员工进行沟通,关注执行力进程。其次,员工要有敬业精神和极大的工作热情,如果他们热爱自己的工作就会尽自己的能力完成任务。我们不可否认公司里大部分员工都是不错的。他们有很多好的工作方法、工作习惯、工作经验,而作为基层管理者就要把这些资源很好的利用起来,我们应该经常组织一些经验交流的活动,把各位好的东西集中起来让每个员工都做到全面改善,尽快丰富自己的工作经验。更好的融入执行力文化。 执行力组织的核心流程即人员流程、战略流程、运营流程。人,执行力团队的关键要素。有了思想,有了决策,可是每项任务必须由团队成员去完成。团队中所有的成员不折不扣将领导者的构思彻底的执行,企业的目标才能够实现。任何的行为与活动都必须有一个“一般的号召”,这就是所谓的'目标。如果没有一般的普遍的号召,就不能动员广大员工行动起来。公司要提高执行力强度,必须通过组织学习、培训等形式提高员工的素质。企业要发展就应该对那些不再
通信技术读书笔记
通信技术读书笔记 【篇一:通信发展简史读书笔记(格式)】 五邑大学土木建筑学院学院 读书笔记 课程名称: 专业: 学号: 姓名:任课教师: 时间: 评定成绩: 读书笔记 1.潜艇堪称水中暗藏的杀手,其突出的特点之一就是其隐蔽性,影响潜艇隐蔽性的因素很多,而潜艇的通信,特别是潜艇的主动发信行为则是潜艇暴露的重要因素之一。随着无线电测向技术的发明,利用岸基、舰载或机载无线电测向设备能测出潜艇发信时的位置,使潜艇招致打击。故此,各国都对潜艇的通信方法和新的通信技术进行了研究,目的就是在确保潜艇在满足必要的通信同时尽量增强潜艇的通信隐蔽性。 潜艇通信的方法主要有无线电静默和快速通信。潜艇无线电静默是潜艇在规定的时间和海区内禁止无线电发信而只收信甚至不收信的隐蔽措施。一般在舰艇接敌前、通过敌占区或执行特殊任务的隐蔽航行时采用。目的是防止敌方利用无线电台和无线电测向设备获取已方舰艇的发信时间、功率、联络关系和电台移动的速度、方向,从而测到己方潜艇所在海区、数量、指挥关系、航速、航向和行动企图等情报。潜艇无线电静默有全面静默和单方静默,单方静默是只接收不发信。 ——摘自《潜艇通信杂谈》 2.turbo码(turbo code)是一种应用在外层空间卫星通信和设计者寻找完成最大信息传输通过一个限制带宽通信链路在数据破坏的噪声面前的其它无线通信应用程序的高性能纠错码。 turbo码的判决 传统的数字化方法一般是先确定一个阈值电平。信号电平低于这个阈值就判决为“0”,高于就判决为“1”,即硬判决。在turbo码的解码过程中,对于一个给定比特的电平被量化成整数,例如从-99到
+99。其数值就被作为判决这个比特为“0”或“1”的可信度的指标(如-89意味着这个比特很可能是“0”,如+28意味着这个比特也许是“1”,但把握不是很大),即软判决。 星通信技术的发展也促进了信道编码技术的迅速发展,从现在的整 体状况来看,turbo码的使用已经越来越广泛了,在国际卫星信道中 的比例也越来越大,这些都是因为turbo码具备了许多优点,例如:turbo码具有接近香农极限的性能、延迟时间短、解码算法能够充分 利用软判决、突发错误纠错性能好、甚至当信道条件差时仍具有较 好的纠错能力等,这是rs码和其他编码不具备的。事实已经证明,turbo码技术具有强大的功能和灵活性,能够为各行各业的用户及 卫星运营商们带来非常明显的效益。 码会很快取代现在所使用的其他前向纠错技术,在卫星通信领域里 得到非常广泛的应用。 ——摘自《解析卫星通信中的turbo码编解码原理》 3.projectloon计划通过热气球给偏远地区提供互联网接入服务。 人们通过使用安置于家中建筑物上的特制网络天线,让信号从天线 发射到热气球,再由气球返回数据传送进入全球因特网中。https://www.360docs.net/doc/391883623.html,也是使用类似的方法,唯一的不同就是,计划利用无人 机作为传输媒介 通讯技术愈加发达的当今社会,反而加剧了缺少网络覆盖的偏远地 区与发达社会间的差距。 最近google和facebook两个巨头公司的均发起了相关项目,googleproject loon和markzuckerberg成立的https://www.360docs.net/doc/391883623.html,组织,致力于借助空中网络基站为世界上网络不畅的偏远地区提供互联网 服务。 projectloon计划通过热气球给偏远地区提供互联网接入服务。人们通过使用安置于家中建筑物上的特制网络天线,让信号从天线发射 到热气球,再由气球返回数据传送进入全球因特网中。https://www.360docs.net/doc/391883623.html, 也是使用类似的方法,唯一的不同就是,计划利用无人机作为传输 媒介。 ——摘自《什么是空中基站》 4.铁路应急通信系统是当铁路运输发生自然灾害或突发事件等紧急 情况时,为确保铁路实施救援指挥的需要,在突发事件现场与救援 指挥中心之间,各相关救援中心之间及现场内部建立的语音、图像 等通信系统。
线性系统理论Matlab实践仿真报告指南
线性系统理论实验报告 学院:电信学院 姓名:邵昌娟 学号:152085270006 专业:电气工程
线性系统理论Matlab实验报告 1、由分析可知系统的状态空间描述,因系统综合实质上是通过引入适当状态反馈矩阵K,使得闭环系统的特征值均位于复平面S的期望位置。而只有当特征根均位于S的左半平面时系统稳定。故当特征根是正数时系统不稳定,设计无意义。所以设满足题目中所需要求的系统的期望特征根分别为λ1*=-2,λ2*=-4。 (a) 判断系统的能控性,即得系统的能控性判别矩阵Q c,然后判断rankQ c,若rank Q c =n=2则可得系统可控;利用Matlab判断系统可控性的程序如图1(a)所示。由程序运行结果可知:rank Q c =n=2,故系统完全可控,可对其进行状态反馈设计。 (b) 求状态反馈器中的反馈矩阵K,因设系统的期望特征根分别为λ1*=-2,λ2*=-4;所以利用Matlab求反馈矩阵K的程序如图1(b)所示。由程序运行结果可知:K即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。 图1(a) 系统的能控性图1(b) 状态反馈矩阵 2、(a) 求系统的能控型矩阵Q c,验证若rank Q c 关于执行力的读后感大全 关于执行力的读后感大全不找借口找方法体现的是“什么叫执行力”这篇短文中的一位退伍军人的形象写照,其中的观点让我倍受启发,受益颇丰写下了这篇执行力的读后感。执行就是有结果的行动。 作为一名木材公司的新职员来说,这位退伍军人在对待公司副总裁的开玩笑似的给他安排一份“不可能完成的任务”应付他的应聘时,他没有灰心,没有感到无助,而是毅然的接受了工作,并“保证完成任务”。在对待公司总裁安排的一项信息有误、甚至故意刁难的任务时,他没有找任何借口,时时刻刻、事事处处体现出服从、诚实的态度和负责、敬业的精神。结合到我们工作实践中来说,再完美的操作方案,如果不能强有力地执行,最终也只能是纸上谈兵。所以要提高我们个人的执行能力,就必须解决好“想执行”和“会执行”的问题,把执行变为自动自发自觉的行动。 依我个人来说,我所匮乏的就是这种不折不扣的执行力,常常在自己心血来潮时就给自己制定了一份工作目标和计划,计划书看起来是即符合实际又富有挑战,可是往往执行力随着时间的推移和进展难度的增大,自己就会慢慢放松、甚至慢慢放弃。学了执行力,让我明白:成功者常改变方法而不改变目标,失败者常改变目标而不改变方法。 看完《什么叫执行力》我决定摒弃惰性,培养自己的自 觉习惯,其实偶尔的偷懒并不是最可怕的,最可怕的是每次都找到偷懒的理由。在工作当中我们常有的状况就是:面对某项任务,反正也不着急要,我先拖着再说,等到了非做不可的地步再做就可以了,但是在这不知不觉中我们已经养护成了拖拉办事的风格,找到了偷懒的理由,那么习惯就成了自然,这是一种消极的、不负责任的态度。 我们不管在工作中还是生活中都应该养成说到做到的好习惯。 关于执行力的读后感大全拜读《真正的执行力》,慷慨激昂、意犹未尽之余,顿觉对实际工作也有很好的指导和借鉴意义。这首先要感谢来熊总和领导们给了我们这个受益匪浅的机会,也感谢同事们的帮助与积极配合。下面就本人有关“执行力”理解的拙见向大家叙述如下,请多指教。 什么叫执行力呢?书中写道:“执行力是一门学问”,“执行力是一种文化”“执行力是一种艺术”等等,我本人理解为“每位员工不折不扣、脚踏实地、义无反顾、持之以恒地执行公司及领导的决策,以达到公司预期的经营目标和宏伟规划”。在日常工作当中,要做到: 第一,从细节中来,到细节中去。常言道:“天下难事,必做于易,天下大事,必作于细”。细节是一种创造,细节是一种动力,细节表现修养,细节体现艺术,细节影藏机会, 课程设计任务书 姓名学号 班级学院电子信息学院课程通信原理课程设计 题目数字调制系统误比特率(BER)测试的仿真设计与分析 设计任务 1.利用SystemView软件按照课设指导书分别画出2DPSK 系统中相干解调与差分解调的高频与不加噪声时低频的误比特率仿真测试原理图。 2.观测低频的仿真过程中原始基带信号波形、差分码波形、2DPSK信号波形、本地载波、解调端相乘器输出、低通滤波器输出、抽样判决输出波形以及码反变换后的输出波形。观测输入和输出波形的时序关系。 3.在2DPSK系统中,“差分编码/译码”环节的引入可以有效地克服接收提取的载波存在180°相位模糊度,即使接收端同步载波与发送端调制载波间出现倒相180°的现象,差分译码输出的码序列不会全部倒相。重新设置接收载波源的参数,将其中的相位设为180°,运行观察体会2DPSK系统时如何克服同步载波与调制载波间180°相位模糊度的。 4.利用建立的SystemView DPSK系统相干接收的仿真模型进行BER测试,产生该系统的BER曲线以此评估通信系统的性能。 时间 进度 课程设计要求在1.5周内做完 主要参考资料[1] 樊昌信,张甫翊,徐炳祥,吴成柯.通信原理(第五版)[M] 北京:国防工业出版社,2002 [2] 罗卫兵,孙桦,张捷.SystemView动态系统分析及通信系统仿真设计[M] 北京:电子工业出版社,2002 [3] 李东生, 雍爱霞, 左洪浩。System View 系统设计及仿真入门与应用[M] 北京: 电子工业出版社, 2002 [4] 青松, 程岱松, 武建华等。数字通信系统的System View 仿真与分析[M] 北京: 北京航空航天大学出版社, 2001 实验报告 课程线性系统理论基础实验日期年月日 专业班级姓名学号同组人 实验名称系统的能控性、能观测性、稳定性分析及实现评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌握如何使用MATLAB进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a)了解以下命令的功能;自选对象模型,进行运算,并写出结 果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性; (c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性 执行力学习心得体会 【第1篇】执行力学习心得体会 上周人事部发放一份关于执行力的文件,给每位员工学习、及自我检查,其实对于这份文件内容,我是非常同意文章所写的观感,以下是我自己的一些看法、及体会: 我个人觉得好多人,不管是做到那个职位的管理层、还是一些基层员工,都是领导给工作就做,也不管工作的质量、完成的效率,好多员工都觉得我完成了就好,至于做的怎么样,是不是达到要求他们觉得是老板、上级去制定的,(好多人都是觉得自己的工作是没有问题,至于你的上级对于的批评觉得是出于私人的情绪,并非出于工作上的)就像文章说到的最终落实下去,就成了蜻蜓点水。只是做表面文章,但对于完成效果如何这个就不是他们关心的,觉得如果不做老板责怪下来就是他们的问题,但是做了做的不好就不是他们的问题,因为他们觉得至少是有去服从。其实对于管理层来说对于老板、上级的话不是只是去听表面的意思,要更深层的去了解这句话的寓意,其实导致许多管理层无法在自己的岗位上发挥,而且他们的特长也没有最大程度上的体现出来,其实最根本的原因是没有弄清楚自己的工作是为了谁而做,都觉得是为了自己的老板、上级去工作,觉得我拿多少钱的工资就做多少钱的事,如果每个人都是这样去想,那永远都不知道自己在工作中所带来的乐趣,不会给你带来工作中的满足 感。 其实现在好多中国的企业导致管理层还有个最根本的原因,其实就是我是领导,那就我说了算了,对于自己的员工当然就跟自己的要求完全不一样,中国有句古话:只须州官放火,不须百姓点灯。其实好多员工是对于自己的领导、上级有许多的看法,但无法把自己最真的想法对于自己的领导去说,当然对于员工领导也会有不同的待遇,不同的待遇当然也会对执行力度的不同,这其实也会造成团队的不和谐因素,也会在部门里造成员工与员工之间的问题、领导之间的问题,这样精力就不会放在工作上,导致工作效率、完成的程度就会造成变制,永远不会做到自我的翻新、自我的检讨,觉得自己身为领导,自己的决定不会有任何问题,慢慢开始建造独立王国,与此同时部门与部门之间缺少沟通、协调、配合。员工与员工之间也缺少坦诚,当然员工也会慢慢产生不信任、肆意破坏制度。 我个人觉得要加强执行力度,首先要学会自我检讨、做到自我批评,对于工作任何事情不可以拖延、敷衍了事,不可以只做表面文章,对于每位员工要真真做到一视同仁,学会用心去聆听员工的心声,做为管理层要非常清楚明白,在什么场合什么话可以说,什么话不可以说,当要求你自己的员工时,这些要求自己是否可以达到标准,工作中要力求完美,对于其他部门及任何一个员工要坦诚,团队的凝聚力是非常重要的,不可以在自己的部门建造自己的王国,要合理的安排自己的时间,对于自己的时间要做管理,很清楚事情的轻重缓急,不可以没有重点和关键,不分先后顺须的去做,做事也要真到坚持到 通信与网络复习笔记——通信部分 第一讲信息论 信息的度量: 不确定度 平均不确定度,熵:单位bit 定理:离散随机变量的最大熵,S表示该随机变量的取值集合 联合熵:pij 联合概率,则联合熵是 条件熵:条件概率的熵H(X|Y)=∑∑p(i,j) log p(i|j) 关系: 互信息: 互信息的理解:①X的不确定度减去观测Y后X残存的不确定度,通过观测Y帮助了解X ②Y的不确定度减去观测X后Y残存的不确定度,通过观测X帮助了解Y的信息 集合对应:并——联合熵;减——条件熵;交——互信息量 X、Y独立→互信息量为0 →H(XY)=H(x)+H(Y)→H(X|Y)=H(X) X、Y相等→互信息量=自身信息量,最大互信息→条件熵为0 信道:信息的通道。信息传输的本质就是,利用接收的结果估计发送的结果,互信息 信道容量:互信息最大值 常见信道: I)BSC 对称二进制信道,差错概率ε,信道容量C=1+εlogε+(1-ε)log(1-ε) II)高斯信道:描述信道转移的概率,加性噪声 互信息量 用到h(X|X)=0 。Gauss是最差的加性信道,h(N)最大 信道容量C=max I(X:Y)(信号自己功率受限P) 香农定理:*信号带宽W,单位时间最多2W个采样 低信噪比:C=1.44P/n0 微分熵: 给定峰值约束,规定则最大微分熵的分布是均匀分布p(X)=1/(2A); 若能量受限,最大熵是高斯分布,熵h(N)= 若随机向量映射:J是X对Y的,则 第二讲压缩编码理论 常用傅立叶变换对 ———— 带通抽样:fs≥2 fH/[fH/B] []是取整最低抽样率:2B 窄带信号 O量化 I)均匀量化:量化噪声方差 Δk=Δ=2V/L 量化噪声Δ^2/12 。还有过载噪声 最优量化分层电平在重建电平终点,重建电平在分层电平质心(用x概率密度求) 此时表示yk最小bit数 工程运用:-V~V均匀量化,不考虑过载,信噪比:/=,多一位码字6dB改善 II)非均匀量化:用于语音,经常落入的区域精度高,损失小,不常落入的区域权重低 压缩编码:取ln→均匀量化→编码;扩张解码:解码→均匀重建→扩张(做exp) 对数量化:y=1/B*lnX 则信噪比S/=3*(L/BV)^2 O PCM 脉冲编码调制 13折现A律近似,或者15折现μ律近似 PCM协议:M1~M8:M1,极性(正负);M2~M4,段落;M5~M8 每段中电平位置 第三讲数字基带传输(一) O符号映射 bit:数字传输的“基本粒子” 符号:集装箱卡车,用于承载信息,可以是物理量 常用M表示符号集合的元素数目。1个符号承载的比特: 临位最小差错映射:格雷码。相邻符号对应的比特串只差错一位。 PAM符号集合: PSK、QAM符号集合: 实 验 报 告 课程 线性系统理论基础 实验日期 年 月 日 专业班级 学号 同组人 实验名称 系统的能控性、能观测性、稳定性分析及实现 评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌 握如何使用MATLAB 进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a )了解以下命令的功能;自选对象模型,进行运算,并写出结 果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,18 2710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性; (c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性 已知两个单位负反馈系统的开环传递函数分别为 s s s s G s s s s G 457.2)(,457.2)(232231-+=++= 用Bode 图法判断系统闭环的稳定性。 (d )判断下列系统是否状态渐近稳定、是否BIBO 稳定。 []x y u x x 0525,100050250100010-=????? ?????+??????????-=关于执行力的读后感大全
通信原理报告(DOC)
系统的能控性,能观测性,稳定性分析
执行力学习心得体会
通信原理学习笔记
系统的能控性、能观测性、稳定性分析