最新工业机器人工作站系统集成技术教学大纲

最新工业机器人工作站系统集成技术教学大纲
工业机器人工作站系统集成技术
一、说明
1.课程的性质和内容
《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。
2.课程的任务和要求
本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。
(1)通过本课程的学习,学生应该达到以下几个方面的专业基础。
(2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。
(3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。
(4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。
(5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。
(6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。
(7)熟悉ABB机器人的硬件连接。
3.教学中应该注意的问题
(1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。
(2)在本课程的教学中应该注意培养学生的逻辑思维能力。
(3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。
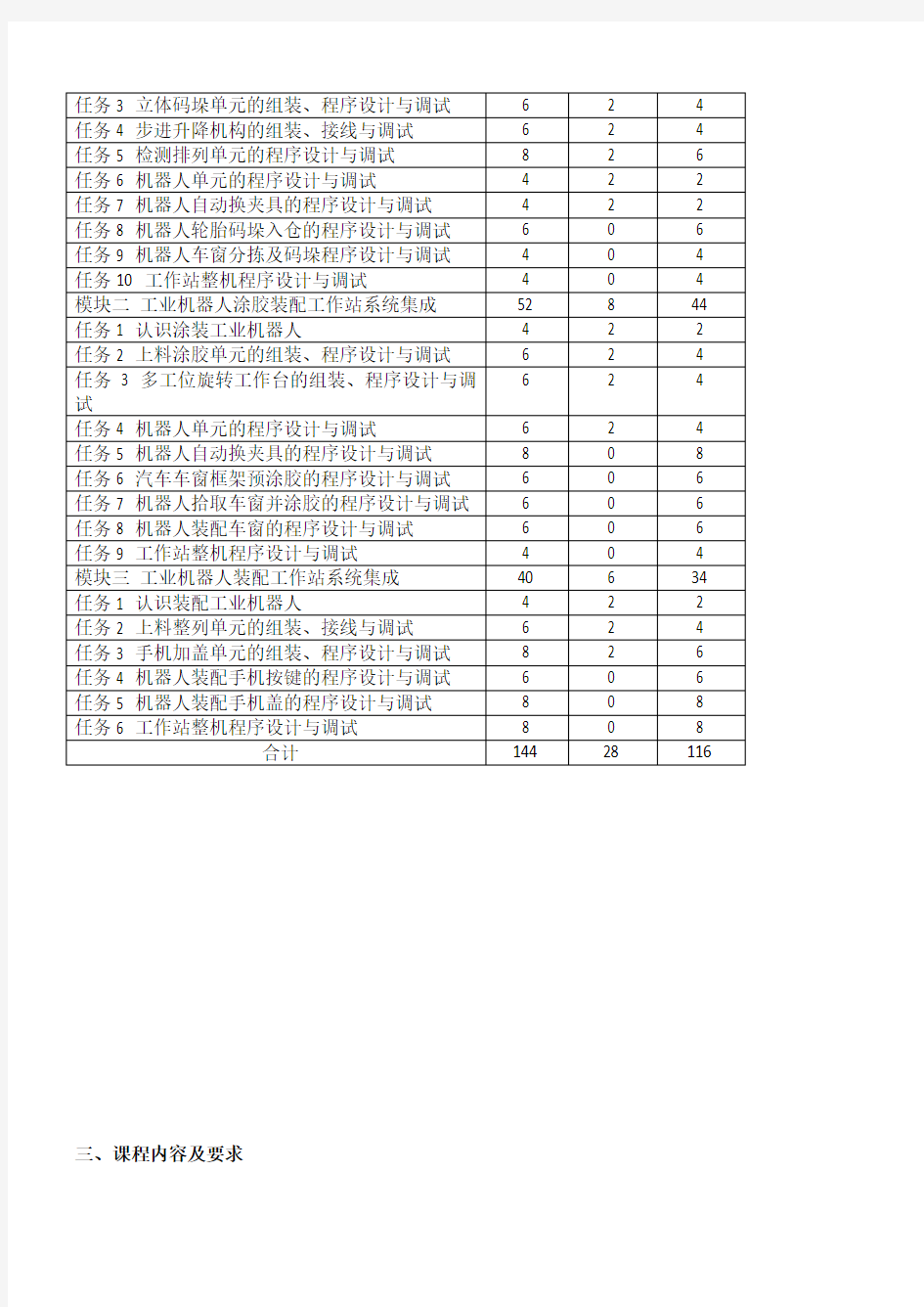
二、学时分配表
三、课程内容及要求
教学要求
1.了解工业机器人码垛工作站的组成。
2.掌握码垛工作站的机械装配。
3.掌握码垛工作站系统编程。
教学内容
任务1 认识码垛工业机器人工作站
任务2 筛选皮带机构的组装、接线与调试
任务3 立体码垛单元的组装、程序设计与调试
任务4 步进升降机构的组装、接线与调试
任务5 检测排列单元的程序设计与调试
任务6 机器人单元的程序设计与调试
任务7 机器人自动换夹具的程序设计与调试
任务8 机器人轮胎码垛入仓的程序设计与调试
任务9 机器人车窗分拣及码垛程序设计与调试
任务10 工作站整机程序设计与调试
教学建议
本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。
模块二工业机器人涂胶装配工作站系统集成
教学要求
1.了解工业机器人涂胶工作站的组成。
2.掌握涂胶工作站的机械装配。
3.掌握涂胶工作站系统编程。
教学内容
任务1 认识涂装工业机器人
任务2 上料涂胶单元的组装、程序设计与调试
任务3 多工位旋转工作台的组装、程序设计与调试
任务4 机器人单元的程序设计与调试
任务5 机器人自动换夹具的程序设计与调试
任务6 汽车车窗框架预涂胶的程序设计与调试
任务7 机器人拾取车窗并涂胶的程序设计与调试
任务8 机器人装配车窗的程序设计与调试
任务9 工作站整机程序设计与调试
教学建议
本项目的主要教学目标是使学生对涂胶工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。
教学要求
1.了解工业机器人手机装配工作站的组成。
2.掌握手机装配工作站的机械装配。
3.掌握手机装配工作站系统编程。
教学内容
任务1 认识装配工业机器人
任务2 上料整列单元的组装、接线与调试
任务3 手机加盖单元的组装、程序设计与调试
任务4 机器人装配手机按键的程序设计与调试
任务5 机器人装配手机盖的程序设计与调试
任务6 工作站整机程序设计与调试
教学建议
本项目的主要教学目标是使学生对手机装配工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。
最新ABB-机器人-RAPID-常用指令详解-中文(1)
ABB 机器人RAPID 常用指令详解-中文
1.88.MoveAbsJ—把机器人移动到绝对轴位置
用途:MoveAbsJ(绝对关节移动)用来把机器人或者外部轴移动到一个绝对位置,该位置在轴定位中定义。使用实例:
终点是一个单一点
对于I R6400C 中的不明确的位置,例如携带超过机器人范围的工具运动。
MoveAbsJ 指令中机器人的最终位置,既不受工具或者工作对象的影响,也不受激活程序更换的影响。但是机器人要用到这些数据来计算负载、TCP 速度和转角点。相同的工具可以被用在相
邻的运动指令中。
机器人和外部轴沿着一个非直线的路径移动到目标位置。所有轴在同一时间运动到
目标位置。该指令只能被用在主任务T_ROB1 中,或者在多运动系统中的运动任务
中。
基本范例:该指令的基本范
例说明如下。也可参看第
207 页更多范例。
例1 MoveAbsJ p50, v1000, z50, tool2;
机器人将携带工具t ool2 沿着一个非线性路径到绝对轴位置p50,以速度数据v1000 和
zone 数据z50。例2 MoveAbsJ *, v1000\T:=5, fine, grip3;
机器人将携带工具grip3 沿着一个非线性路径到一个停止点,该停止点在指令中作为一个绝对轴位置存储
(用*标示)。整个运动需要5秒钟。
项目:
MoveAbsJ [\Conc] ToJointPos [\ID] [\NoEOffs] Speed [\V] | [\T] Zone [\Z] [\Inpos]
Tool [\Wobj] [\Conc]:
并发事件
数据类型:switch
当机器人正在移动的时候执行的后续指令。该项目通常不使用,但是当和外部设备通讯、不
需要同步的时候可以用来缩短循环周期。
当使用项目\Conc 的时候,连续运动指令的数量限制为5。在包含S torePath-RestoPath 的程序段中不允许包含项目\Conc 的运动指令。
如果该项目忽略并且T oJointPos 不是一个停止点,在机器人到达程序z one 之前一段时间后续指令就开始执行了。
该项目不能用在多运动系统的坐标同步运动中。
ToJointPos:到达的关
节位置。数据类
型:jointtarget
机器人和外部轴的绝对目标轴位置。它被定义为一个命名的位置或者直接存储在指令中(在指令中用*标示)。
[\ID]:
同步I D 数据类型:identno 该项目必须使用在多运动系统中,如果并列了同步运
动,则不允许在其他任何情况下使用。指定的I D 号在所有协同的程序任务中必须
相同。该I D 号保证在r outine 中运动不会混乱。
[\NoEOffs]:没有外
部偏移量数据
类型:switch
如果项目\NoEOffs 设为1,MoveAbsJ 运动将不受外部轴的激活偏移量的影响。
Speed:数据类型:
speeddata
运动所用的速度数据。速度数据定义了T CP、工具再定位和外部轴的速度。
[\V]:速度数据
类型:num
该项目用来在指令中直接指定T CP 的速度,单位m m/s,它替代在速度数据中指定的相应的速度。[\T]:时间数据类
型:num
该项目用来指定机器人运动的总时间,单位秒。它替代相应的速度数据。
Zone:数据类型:
zonedata
运动的z one 数据。Zone 数据描述了产生的转角路径的大小。
[\z ]:
Zone
数据类型:num
该项目用来在指令中直接指定机器人TCP 的位置精度。转角路径的长度用毫米给出,替代zone
数据中指定的相应数据。
[\Inpos ]:到位数据类型:stoppointdata
(停止点数据)
改项目用来指定机器人TCP 在停止点位置的收敛性判别标准。该停止点数据代替在zone 参数中指定的
zone。
Tool:数据类型:tooldata 运
动过程中所携带的工具。
TCP 的位置和工具的负载在工具数据中定义。TCP 位置用来计算运动的速度和转角路径。
[\Wobj ]:工作对象
数据类型:
wobjdata
在运动过程中使用的工作对象。
如果机器人抓着工具的时候,该项目可以忽略。但是,如果机器人抓着工作对象,也就是说工具
是静止的,或者带有外部轴,那么该项目必须指定。
在有并列工具或者有并列外部轴的情况下,系统使用该数据计算运动的速度和转角路径,该数
据在工作对象中定义。
程序执行:
MoveAbsJ 运动不会受激活的程序转移的影响,并且如果使用了可选项目\NoEOffs,将没有外部轴的偏移。如果不使用\NoEOffs,外部轴的目标位置将会受到激活的外部轴偏移的影响。工具按照轴角度插补移动到绝对轴目标位置。这就是说每一个轴都按照固定的速度运动,并且所有轴都在同一时间到达目标位置,这样就形成一个非线性的路径。
总的来说,TCP 大约按照编程的速度运动。在T CP 运动的同时,工具重新定向,并且外部轴也在运动。如
果重新定向的或者外部轴的程序要求的速度不能达到,TCP 的速度将被减小。
当转换到路径的下一段的时候通常会产生转角路径。如果停止点在Zone 数据中指定,只有在机
器人和外部轴到达合适的轴位置的时候程序才能继续执行。
更多范例:
关于如何使用该指令,更多范例说明如下:
例1 MoveAbsJ *, v2000\V:=2200, z40 \Z:=45, grip3;
Grip3 沿着一个非线性路径运动到一个存储在指令中的一个绝对轴位置。执行的运动数据为v2000 和z40。
TCP 的速度大小是2200mm/s,zone 的大小是
45mm。例2 MoveAbsJ p5, v2000, fine
\Inpos :=inpos50, grip3;
Grip3 沿着一个非线性路径运动到绝对轴位置p5。当停止点fine 的50%的位置条件和50%的速度条件满足的时候,机器人认为它已经到达位置。它等待条件满足最多等 2 秒。参看
stoppointdata 类型的预定义数据inpos50。
例3 MoveAbsJ \Conc, *, v2000, z40, grip3;
Grip3 沿着一个非线性路径运动到一个存储在指令中的一个绝对轴位置。当机器人运动的时候,也执行了并发的逻辑指令。
例4 MoveAbsJ \Conc, * \NoEOffs, v2000, z40, grip3;
和以上的指令相同的运动,但是它不受外部轴的激活的偏移量的
影响。例5 GripLoad obj_mass;
MoveAbsJ start, v2000, z40, grip3
\Wobj:=obj;
机器人把和固定工具grip3 相关的工作对象obj 沿着一个非线性路径移动到绝对轴
位置s tart。
限制:
为了能够后台运行中包括指令M oveAbsJ,并且避免单一点和模糊区的问题,并发指令满足以下的要求是很
必要的(参看下图)
下图显示了后台运行MoveAbsJ 指令的一些
限制。
语法:
MoveAbsJ [‘\’ Conc ‘,’ ] [ ToJointPos’ :=’ ] <关节目标表达式
(IN)> [ ‘\’ ID ‘:=’
NoEOffs ] ‘,’
[ Speed ‘:=’ ] (IN)> [ ‘\’ V ‘:=’ (IN)> ] | [ ‘\’ T’ :=’ [‘\’ Z ‘:=” ] [ ‘\’ Inpos’ :=’ [Tool ‘:=’ ] [‘\’Wobj’ :=’ wobjdata 类型的恒量 (PRS)> ] ‘;’ 相关信息: 1.89.MoveC—让机器人做圆周运动 用途: 该指令用来让机器人T CP 沿圆周运动到一个给定的目标点。在运动过程中,相对圆的方向通常保持不变。该指令只能在主任务T_ROB1 中使用,在多运动系统中的运动任务中使用。 基本范例:该指令的基本范例 说明如下:也可参看第212 页更多范例。 例1Move p1, p2, v500, z30, tool2; Tool2 的T CP 圆周运动到p2,速度数据位v500, zone 数据为z30.圆由开始点、中间点p1 和目标点p2 确定。例2MoveC *, *, v500 \T:=5, fine, grip3; Grip3 的T CP 沿圆周运动到存储在指令中的f ine 点(第二个*标记)。中间点也存储在指令中(第一个*标记)。 整个运动需要5秒钟。 例3MoveL p1, v500, fine, tool1; MoveC p2, p3, v500, z20, tool1; MoveC p4, p1, v500, fine, tool1; 下图说明了怎么用两个M oveC 指令画一个完整的圆。 P1 P4 P2 P3 项目: MoveC [\Conc] CirPoint ToPoint [\ID] Speed [\V] | [\T] Zone [\z] [\Inpos] Tool [\Wobj] [\Corr] [ \Conc]: 并发事件 数据类型:switch 当机器人运动的同时,后续的指令开始执行。该项目通常不使用,但是当使用飞点(flyby points) 时,可以用来避免由CPU 过载引起的不想要的停止。当使用高速度并且编程点相距较近时这是很 有用的。例如,当和外部设备通讯并且外部设备和机器人通讯不要求同步的时候,这个项目也很有 用。 使用项目\Conc 的时候,连续的运动指令的数量限制为5 个。在包括StorePath—RestorePath 的程序段中不 允许使用带有\Conc 项目的运动指令。 如果不使用该项目,并且ToPoint 不是停止点,在机器人到达程序zone 之前一段时间后续指令 就开始执行了。在多运动系统中的坐标同步运动中不能使用该项目。 CirPoint:数据类型:robtarget 机器人的圆轴上的中间点。这是圆轴上处于起点和终点之间的点。 为了获得最好的精度,最好选择起点和 终点的中间位置附近的点。如果太接近起点或者终点,机器人将会报警。中间点定义为一个命名的位置或者直接存储在指令中(在指令中用*标记)。不使用外部轴的位置。 ToPoint:数据类型:robtarget 机器人和外部轴的目标点。定义为一个命名的位置或者直接存储在指令中(在指令中用*标记)。 [ \ID ]: 同步I D 数据类型:identno 该项目必须使用在多运动系统中,如果并列了同步运动,则不允许在其他任何情况下使用。 指定的I D 号在所有协同的程序任务中必须相同。该I D 号保证在r outine 中运动不 会混乱。如果并列了同步运动,不允许在其他任何情况下使用。 Speed:数据类型: speeddata 应用到运动中的速度数据。速度数据定义T CP、工具再定位和外部轴的速度。 [ \V]:速度数据 类型:num 该项目用来在指令中直接指定T CP 的速度,单位m m/s。它代替速度数据中指定的相应的速度。[\T]:时间数据类 型:num 该项目用来指定机器人和外部轴运动的总时间,单位秒。它代替相应的速度数据。 Zone:数据类型: zonedata 运动的z one 数据。它描述产生的转角路径的大小。 [ \Z]:Zone 数据 类型:num 该项目用来在指令中直接指定机器人TCP 的位置精度。转角路径的长度以毫米为单位给出,它代替zone 数据中指定的z one。 [\Inpos ]:到位数据类型:stoppointdata (停止点数据) 改项目用来指定机器人TCP 在停止点位置的收敛性判别标准。该停止点数据代替在zone 参数中指定的 zone。 Tool:数据类型: tooldata 运动过程中所使用的工具。TCP 是运动到指定目标的点。 [\Wobj ]: 工作对象 数据类型:wobjdata 机器人在指令中定位的相关到的工作对象。该项目可以忽略,如果忽略了,定位相关到世界坐标系。在另一方面,如果使用了静态T CP 或者并列外部 轴,为了执行相关到工作对象的圆周,该项目必须被指定。 [ \Corr ]:改正数 据类型:switch 如果使用该项目的话,通过C orrWrite 指令写到改正入口的改正数据将被添加到路径和目标位置。 程序执行: 机器人和外部单元以下说明移动到目标位置: 工具的T CP 按照程序中的定常速度作圆周运动。 工具按照定常速度重新定向,从开始位置的方向到目标点的方向。 重新定向相对于圆周路径执行。因此如果开始点和目标点的方向相对于路径是相同的,在移动过程中相对方向保持不变(参看下图)。 下图说明了圆周运动过程中的工具方向。 圆周点的方向没有到达,它只是用来区别重新定向中两个可能的方向。沿着路径重新定向的精度只取决于 开始点和目标点的方向。 圆周运动过程中的工具方向的不同模式在指令C irPathMode 中有描述。非并列的外部轴以定常 速度执行,目的是和机器人轴同时到达目标点。圆周点中的位置没有用到。如果重新定向或者 外部轴不能达到程序中的速度,TCP 得速度将被减小。当运动转换到路径中的下一段的时候通 常会产生转角路径。如果停止点在z one 数据中指定,在机器人和外 部轴到达合适位置的时候,程序才能继续执行。 更多范例: 如何使用该指令得更多范例说明如下: 例1 MoveC *, *, v500 \V:=550, z40 \Z:=45, grip3; Grip3 的TCP 圆周运动到存储在指令中的位置。运动中把数据设定到v500 和z40 执行; TCP 的速度是 550mm/s,zone 的大小是45mm。 例2 MoveC p5, p6, v2000, fine \Inpos := inpos50, grip3; Grip3 的T CP 圆周运动到停止点p6。当停止点f ine 的50%的位置条件和50%的速度条件满足的时候,机器 人认为它到达该点。它等待条件满足最多等两秒。参看s toppointdata 数据类型的预定义数据inpos50。 例3 MoveC \Conc, *, *, v500, z40, grip3; Grip3 的TCP 圆周运动到指令中存储的位置。圆周点也存储在指令中。当机器人移动的时候,执行后续逻辑指令。 例4 MoveC cir1, p15, v500, z40, grip3 \Wobj :=fixture; Grip3 的T CP 经过圆周点c ir1 圆周运动到位置p15。这些位置在f ixture 的对象并列系统中指定。限制: 对于c irPoint 和T opoint 如何放置有一些限制,如下图描述: 起点和T oPoint 之间的最小距离是0.1 毫米。 起点和C irPoint 之间的最小距离是0.1 毫米。 从起点到C irPoint 和T oPoint 之间的最小角度是1度。在接近这些限制的时候,精度将会很差,即如果圆的起点和T oPoint 相距较近,圆倾斜引起的缺陷可能远大 于编程点所使用的精度。 确保机器人在程序执行过程中可以到达C ircle Point(圆周点),必要的话把圆再分段。 当机器人停止在圆周路径上,执行模式从向前到向后得改变,或者相反,是不允许的,并且将导致错误信息。 警告! 当T CP 在圆周点和终点之间的时候,MoveC 指令(或者任何其它包括圆周运动的指令)不允许从开头执行。 否则机器人将不能执行编程的路径(从和编程路径方向不同的方向绕圆周路径定位)。 语法: MoveC [ ‘\’ Conc ‘,’ ] [CirPoint’ :=’ ] (IN)> ‘,’ [ToPoint’ :=’ ] < robtarget 类型的表达式(IN)> ‘,’ [ ‘\’ID ‘:=’ [ Speed ‘:=’ ] (IN)> [‘\’ V ‘:=’ (IN)>] [‘\’ T ‘:=’ [zone ‘ :=’] (IN)> [‘\’ Z ‘:=’ (IN)> ] [‘\’Inpos’ :=’ [‘\’Wobj ‘:=’ [ ‘\’ Corr ] ‘;’ 相关信息: 1.90.MoveCDO-圆周移动机器人并且在转角处设置数字输出 用途: MoveCDO(圆周移动数字输出)用来把TCP 圆周移动到一个给定的目标点。指定的数字输出在目标点的转角路径的中间被置位/复位。在运动过程中,相对于圆周的方向通常保持不变。 该指令只能用在主任务T_ROB1,或者多运动系统的运动任务中。 基本范例:该指令的基本范例 说明如下。 例1 MoveCDO p1, p2, v500, z30, tool2, do1, 1; Tool2 的TCP 圆周移动到位置p2,速度数据v500 和z one 数据z30。圆周由开始点、圆周点p1 和目标点p2 确定。在转角路径p2 的中间位置设置输出d o1。 项目: MoveCDO CirPoint ToPoint [\ID] Speed [\T] Zone Tool [\Wobj] Signal V alue CirPoint:数据类型:robtarget 机器人的圆周点。圆周点是圆周上开始点和目标点之间的一个位置。 为了获得最好的精度,它最好处于开 始点和目标点一半的位置。如果它太靠近开始点或者目标点,机器人将给出一个警告。圆周点定义为一个命名 的位置或者直接存储在指令中(在指令中用*标记)。不使用外部轴的位置。 ToPoint:数据类型:robtarget 机器人和外部轴的目标点。定义为一个命名的位置或者直 接存储在指令中(在指令中用*标记)。 [\ID]: 同步I D 数据类型:identno 该项目必须用在并列了同步运动的多运动系统中,不允许 在其它任何条件下使用。在所有协作的程序任务中,指定的I D 号码必须相同。ID 号 保证了在r outine 中运动不会混淆。 Speed:数据类型: speeddata 应用到运动中的速度数据。速度数据定义T CP、工具重新定向和外部轴的速度。 [\T]:时间数据类 型:num 该项目用来指定机器人和外部轴运动的总时间,单位秒。它用来替换相应的速度数据。Zone:数据类型: zonedata 运动的z one 数据。Zone 数据描述产生的转角路径的大小。 Tool:数据类型:tooldata 当机器人运动时时用的工具。工具中心 点就是运动到目标点的那个点。 [\Wobj]:工作对象数 据类型:wobjdata 工作对象(对象坐标系统),就是在指令中机器人相关到的对象。该项目可以忽略,如果忽略的话,位置相关到世界坐标系。另一方面,如果使用了静止T CP 或者并列的外 部轴,为了执行相关到工作对象的圆周,该项目必须指定。 Signal:数据类型: signaldo 要改变的数字输出信号的名称。 Value:数据类型:dionum 期望 的信号的数值(0 或者1)。 程序执行: 关于圆周运动得更多信息参看指令M oveC。在飞点的转角路径的 中间位置,数字输出信号置位/复位,如下图所示。下图说明在 转角路径M oveC 指令的数字输出信号的置位/复位。 对于停止点,我们推荐使用“正常”的编程顺序,即MoveC+SetDO。但是当在指令MoveCDO 中使用停止点、当机器人到达停止点的时候,数字输出信号置位/复位。 在执行模式继续逐步向前而不是逐步向后时,指定的I/O 信号被置位/复位。 限制: 按照指令M oveC 的常规限制。 语法: MoveCDO [ CirPoint ‘:=’ ] [ToPoint’ :=’] ‘,’ [‘\’ ID ‘:=’ [Speed ‘:=’ ] [‘\’ T ‘:=’ < num 类型的表达式(IN)>] ‘,’ [Zone ‘:=’ ] ‘,’ [Tool ‘:=’ ] (PERS)> [‘\’ Wobj’ :=’ (PERS)>]’,’ [Signal ‘:=’ ] 量(V AR)>] ‘,’ [Value ‘:=’ ] 达式(IN)>] ‘;’ 相关信息: 1.91.MoveCSync-圆周移动机器人,并且执行一个RAPID 程序 用途: MoveCSync(同步圆周移动)用来圆周移动T CP 到一个给定的目标位置。在目标点的转角路径的中间位置,指定的R APID 程序开始运行。在运动过程中,相对于圆周的方向通常保持不变。 该指令只能用在主任务T_ROB1,或者多运动系统的运动任务中。 基本范例:该指令的基本范例 说明如下。 例2 MoveCSync p1, p2, v500, z30, tool2, “proc1”; Tool2 的TCP 圆周移动到位置p2,速度数据v500 和z one 数据z30。圆周由开始点、圆周点p1 和目标点p2 确定。在转角路径p2 的中间位置程序p roc1 开始执行。 项目: MoveCSync CirPoint ToPoint [\ID] Speed [\T] Zone Tool [\Wobj] ProcName CirPoint:数据类型:robtarget 机器人的圆周点。圆周点是圆周上开始点和目标点之间的一个位置。 为了获得最好的精度,它最好处于开 始点和目标点一半的位置。如果它太靠近开始点或者目标点,机器人将给出一个警告。圆周点定义为一个命名 的位置或者直接存储在指令中(在指令中用*标记)。不使用外部轴的位置。 ToPoint:数据类型:robtarget 机器人和外部轴的目标点。定义为一个命名的位置或者直接存储在指令中(在指令中用*标记)。 [\ID]: 同步I D 数据类型:identno 工业机器人工作站系统集成技术 一、说明 1.课程的性质和内容 《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。二、学时分配表 三、课程内容及要求 模块一工业机器人码垛工作站系统集成 教学要求 1.了解工业机器人码垛工作站的组成。 2.掌握码垛工作站的机械装配。 3.掌握码垛工作站系统编程。 教学内容 任务1 认识码垛工业机器人工作站 任务2 筛选皮带机构的组装、接线与调试 任务3 立体码垛单元的组装、程序设计与调试 任务4 步进升降机构的组装、接线与调试 任务5 检测排列单元的程序设计与调试 任务6 机器人单元的程序设计与调试 任务7 机器人自动换夹具的程序设计与调试 任务8 机器人轮胎码垛入仓的程序设计与调试 任务9 机器人车窗分拣及码垛程序设计与调试 任务10 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 模块二工业机器人涂胶装配工作站系统集成 教学要求 1.了解工业机器人涂胶工作站的组成。 2.掌握涂胶工作站的机械装配。 3.掌握涂胶工作站系统编程。 教学内容 任务1 认识涂装工业机器人 任务2 上料涂胶单元的组装、程序设计与调试 任务3 多工位旋转工作台的组装、程序设计与调试 任务4 机器人单元的程序设计与调试 任务5 机器人自动换夹具的程序设计与调试 任务6 汽车车窗框架预涂胶的程序设计与调试 任务7 机器人拾取车窗并涂胶的程序设计与调试 任务8 机器人装配车窗的程序设计与调试 变配电自动化系统集成设计 摘要:通过对目前人工操作室配电所存在的问题进行分析,按现行变配电设计规范对变配电控制、测量和监视的要求为设计目标,提出采用网络控制的方案,并对系统进行需求分析,可行性分析论证后采用博大工控公司的BDP-6000系列微机保护装置和局域网的连接组成变配电自动化系统。采用Sybaes数据库来保障变配电控制自动化系统的运行稳定、数据及时存储、确保大规模数据的存储安全。用户界面采用博大开发的组态工具设计,用户界面绚丽多彩,用户界面隐藏了与数据库、网络部分的复杂接口,通过组态图、各种监视控制窗口以及调度员权限管理工作变得直观。 1.前言 人类进入21世纪,科学技术飞速发展,特别是计算机技术的发展更是日新月异,已经应用到各个领域。而计算机网络技术发展更快,可以说网络技术已经为信息化社会架设了高速公路。如今,从政府机关,企业事业单位,医院,百货商场,银行和证券交易所,到一个部门,一个办公室,一个宿舍或一个家庭,随处都可以看到网络的存在,随处都可以享受网络生活带来的便利。 随着计算机和网络技术的发展,网络技术已经与现代建筑巧妙集成。即现代所谓的智能建筑。智能建筑是信息化社会,网络化社会的必然产物。智能建筑是利用系统集成方法,将计算机网络技术与建筑艺术有机结合,通过对设备的自动监控,对信息资源的管理和对使用者的信息服务及其与建筑的优化组合,所获得的投资合理,适合信息化需要并且具有安全,高效,舒适,便利和灵活的建筑物。 变配电自动控制系统是智能建筑电气设计的一个重要组成部分,其能否安全、可靠地运行,方便、快捷的操作,远程控制智能化管理,是智能建筑的重要体现。一类建筑供电多数采用高压10kv系统单母线分段运行,两路高压电源同时供电。当一路电源断电时,中间联络开关自动闭合,由另一路电源向全部一级,二级负荷供电。为做好供电的安全性设各级保护,保护分为:进线过电流保护,电流速断保护和低电压保护。母线联络柜装设过电流保护。变压器装设过电流保护,电流速断保护,温度保护。为保障变配电系统时监控,监视,记录供电系统的运行情况。高压系统要进行进线与中间联络断路器状态控制监测,电压,电流,频率,有功功率,无功功率,变压器温度及故障状态正常运行显示与报警。低压系统包括进线与中间 学年第学期期末试卷 B 卷首页 课程名称:工业机器人工作站系统集成出卷教师: 任课教师:出卷日期:年月日考试班级: 教学团队审核意见: 签名:日期:年月日系(部)审核意见: 签名:日期:年月日 试题分布情况 答案及评分标准(请与试题分开):一、填空题(每空1分,共30分) 1、ABB、安川 2、示教模式、再现模式、远程模式 3、伺服电源 4、100、OFF、ON 5、绝对编码器 6、D、5 7、编码器、新电池组 8、远程 9、连续轨迹型、点位型 10、工业机器人本体、机器人控制柜、末端执行器、输送线、外围控制系统 11、暂停、急停 12、法兰 13、外部轴、同步 14、翻转变位 15、焊枪、母材 二、判断题(每题2分,共20分) 1(×) 2(√) 3(×) 4(√) 5(√)6(√) 7(√) 8(√) 9(×) 10(√) 三、分析题(共30分) 1、(10分) a图4分,IN1线1分,IN2线1分,COM线2分;b图6分,IN1线1分,IN2线1分,COM线2分,PC线2分; a)使用变频器内部电源 b)使用变频器外部电源 2、(10分) 3、(10分) 1)当使用外部急停时,跳线一定要拆除。如果不拆除,外部急停信号无效,将导 致机器人无法停止的事故。(3分) 2)采用双回路急停,可以防止外部急停信号当有一个常闭触头由于故障不能断开时, 出现机器人不能急停的事故。二个触头只要有一个断开,就可以保证机器人急停,降 低了不能急停的概率,提高了系统的安全性。(4分) 3)机器人急停后,需要通过操作机器人示教器,在示教模式下,使机器人回到作业 原点,然后再重新控制机器人运行。( 3分) 四、综合应用题(共20分) (1)(5分) 《工业机器人》课程教学大纲 一.课程的性质与任务 课程性质:本课程综合介绍了机器人技术,设计思想和发展趋势 主要任务:本课程是要求学生通过学习、课堂教育,能了解机器人发展的最新技术与现状;初步掌握机器人技术的基本知识。 三.课程教学内容 第一章绪言 简述机器人学的起源与发展,讨论机器人学的定义,分析机器人的特点、结构与分类。 第二章机器人学的数学基础 空间任意点的位置和姿态变换、坐标变换、齐次坐标变换、物体的变换和逆变换,以及通用旋转变换等。 第三章机器人运动方程的表示与求解 机械手运动姿态、方向角、运动位置和坐标的运动方程以及连杆变换矩阵的表示,欧拉变换、滚-仰-偏变换和球面变换等求解方法,机器人微分运动及其雅可比矩阵等 第四章机器人动力学 机器人动力学方程、动态特性和静态特性;着重分析机械手动力学方程的两种求法,即拉格朗日功能平衡法和牛顿-欧拉动态平衡法;然后总结出建立拉格朗日方程的步骤 第五章机器人的控制 机器人控制与规划 第六章机器人学的现状、未来 包括国内外机器人技术和市场的发展现状和预测、21世纪机器人技术的发展 趋势、我国新世纪机器人学的发展战略等。不同类型机器人的研究发展状况等。四.教学的基本要求 采用启发式教学,培养学生思考问题、分析问题、解决问题的能力;理论以够用为度,且从应用的角度,尽量简化定量分析。 五.建议教材与教学参考书 1、机器人学、蔡自兴、清华大学出版社、2000 2、机器人学导论,约翰J.克雷格、西北工业大学出版社、1987 六.说明 1.本课程的教学原则上须由一定工作经验的讲师及讲师以上的教师担任,以保证理论知识和实践操作技能教学的需要。 2.本课程适用于高职数控技术应用、机电一体化、机电工程及自动化、机械工程与自动化等专业。 主编:张晖 主审:曹京生 一、机器人系统集成介绍 1.机器人工业化模式 工业机器人系统集成商处于机器人产业链的下游应用端,为终端客户提供 应用解决方案,其负责工业机器人应用二次开发和周边自动化配套设备的集成,是工业机器人自动化应用的重要组成。只有机器人本体是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。 相较于机器人本体供应商,机器人系统集成供应商还要具有产品设计能力、对终端客户应用需求的工艺理解、相关项目经验等,提供可适应各种不同应用 领域的标准化、个性化成套装备。从产业链的角度看,机器人本体(单元)是 机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。本体产品由于技术壁垒较高,有一定垄断性,议价能力比较强,毛利较高。而系统集成的壁垒相对较低,与上下游议价能力较弱,毛利水平不高,但其市 场规模要远远大于本体市场。 工业机器人产业化过程中,可以归纳为三种不同的发展模式,即日本模式、欧洲模式和美国模式。 日本模式:各司其职,分层面完成交钥匙工程。即机器人制造厂商以开发 新型机器人和批量生产优质产品为主要目标,并由其子公司或社会上的工程公 司来设计制造各行业所需要的机器人成套系统,并完成交钥匙工程; 欧洲模式:一揽子交钥匙工程。即机器人的生产和用户所需要的系统设计 制造,全部由机器人制造厂商自己完成; 美国模式:采购与成套设计相结合。美国国内基本上不生产普通的工业机 器人,企业需要时机器人通常由工程公司进口,再自行设计、制造配套的外围 设备,完成交钥匙工程中国与美国类似,机器人公司集中在机器人系统集成领域。 目前,国内的机器人企业多为系统集成商。根据国际经验来看,国内的机 器人产业发展更接近于美国模式,即以系统集成为主,单元产品外购或贴牌, 为客户提供交钥匙工程。与单元产品的供应商相比,系统集成商还要具有产品 设计能力、项目经验,并在对用户行业深刻理解的基础之上,提供可适应各种 不同应用领域的标准化、个性化成套装备。 中国机器人市场基础低、市场大。中国机器人产业化模式较可行的是从集 成起步至成熟阶段采用分工模式。即美国模式(集成)-日本模式(核心技术)-德国模式(分工合作)。 2.工业机器人集成产业应用方向 自动化系统集成的发展趋势 北京远东仪表有限公司副总经理张洪垠 关键词:自动化,系统集成,解决方案,发展趋势 Key W or d: Automation. system Integration. Solution. developing trend 【摘要】本文介绍了自动化行业新的发展所趋,自动化公司和系统集成商为能给用户提供整体自动化技术解决方案,都在走系统集成之路。系统集成和提供自动化解决方案,二者是相辅相成的关系。从技术和产品上看,系统集成模式是自动化发展的必然趋势;从用户需求上看,需要提供整体自动化解决方案;供应商的发展模式:都致力于打造最具竞争力的自动化解决方案供应商。 【Abstract 】This essay introduces the new trend of development of automation industry. In order to provide the clients with integral solution of automation technology. the automation companies and system integrator all choose the way of system integration. System integration and providing the solution of automation can be supplemented mutually. For technology and the products.System integration mode is the inevitable trend of development of automation industry. For the requirements from clients. Interal solution of automation is needed. The development pattern of the suppliers: they all work to become the most competitive supplier who can provide solution of automation. 随着工业装置的大型化、连续化、高参数化,对自动化产品的要求不断提高。为了达到工业设备的安全启/停、稳定运行、优化操作、故障处理、低碳经济等要求,必须把不同厂家生产的各种仪器仪表产品和系统无缝地集成为一个协调的信息系统。如何处理这些仪器仪表产品、系统之间的数据传递、信息共享、协调操作等以满足用户的要求已经成为一项十分重要的技术,即系统集成技术。另外,以提出整体解决方案(SOLUTION)为目标的应用技术和以优化软件、先进控制算法为代表的应用软件也已成为新的发展趋势。这些技术的发展都为用户带来明显的经济效益。 根据当今我国客户需求和市场变化,近年来,自动化公司和系统集成商为能给用户提供整体自动化技术解决方案,都在走系统集成之路,过去只做DCS或只做仪表的公司,现在发生了明显的转变。国际知名的大牌自动化公司几乎都是不但做现场仪表业务,也做DCS、PLC系统业务,既做产品销售,也做项目实施和工程技术服务,能给用户提供全集成的自动化技术解决方案,产品集成能力、方案技术能力、工程服务能力和实力都较强,不仅是产品销售公司,也是工程技术公司。譬如:1)、国内知名的自动化工程公司如和利时、浙江中控、国电智深、南京科远(靠DCS起家),其 多年质保操作简单方便快捷—————————————————————————————————————————————对于我们大多数人来说,社会发展速度这么快,生活中的一切都越来越智能化,机器人并不是什么难见的,作为一种新颖的能助力设备够比较节省人力,那么其上下料工作站你了解吗?接下来由安徽泰珂森智能装备科技有限公司为您简单介绍,希望能给您带来一定程度上的帮助。 工业机器人上下料作站由上下料机器人、数控机床、PLC控制柜、输送线、等组成。 1)上下料工业机器人 上下料工业机器人包含:工业机器人、控制柜、示教器、末端执行器。上下料工业机器人的选型一般根据自动生产线加工产品与设备布局来选用工业机器人及末端执行器。 2) 数控机床 多年质保操作简单方便快捷—————————————————————————————————————————————数控机床的任务是对工件进行加工,而工件的上下料则由工业机器人完成。 3) PLC控制系统 PLC控制柜用来安装断路器、PLC、开关电源、中间继电器、变压器等元件器。 4) 上下料输送线 上下料输送线的功能是将载有待加工工件的托盘输送到上料工位,机器人将工件搬运至机床进行加工,再将加工完成的工件搬运到托盘上,由输送线将加工完成的工件输送到装配工作站进行装配。 工业机器人上下料工作流程如下: (1) 当载有待加工工件的托盘输送到上料位置后,机器人将工件 多年质保操作简单方便快捷—————————————————————————————————————————————搬运到数控机床的加工台上; (2) 数控机床进行加工; (3) 加工完成,机器人将工件搬运到输送线上料位置的托盘上; (4) 上料输送线将载有已加工工件的托盘向装配工作站输送。 安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。 公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。致力于以工业机器人应用为核心,为客户提供完善的自动化解决方案和交钥匙工程,同时是德国库卡、日本发那科、日本川崎、国产埃夫特机器人授权代理商与系统集成商,在机器人技术应用上有着密切的合作,为用户提供强有力的技术支撑。 《工业机器人》课程教学大纲 一.课程基本信息 《工业机器人》是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。通过该课程的学习,使得学生基本熟悉这门技术以及其发展状况,为今后从事光机电一体化与系统设计、制造的研究工作打下基础。 开课单位:机械工程学院 课程编号: 02010267b 英文名称:INDUSTRIAL ROBOT TECHNOLOGY 学时:总计32学时,其中理论授课26学时,实验(含上机)6学时 学分:2学分 面向对象:机械电子工程专业 先修课程:《线性代数》,《测试技术及仪器》,《电工电子学》,《机械设计基础》 教材: 《工业机器人》第二版吴振彪王正家主编(华中科技大学出版社) 主要教学参考书目或资料: 1 《工业机器人技术基础》孙树栋主编(西北工业大学出版社) 2 《机器人与控制技术》孙迪生,王炎主编机械工业出版社,1997 二.教学目的和任务 《工业机器人》是机械电子工程的专业选修课,通过本课程的学习,使学生掌握机器人机构设计、运动分析、控制和使用的技术要点和基础理论。机器人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有一个全面、深入的认识。培养学生综合运用所学基础理论和专业知识进行创新设计的能力。 三.教学目标与要求 本课程系统的介绍了机器人设计、控制、编程和使用的理论基础和技术要点,包括工业机器人的一般概论,机器人运动学,静力/动力学分析,工业机器人机械系统设计,工业机器人的控制和工业机器人的应用等内容。通过课程学习,使学生掌握工业机器人的基本原理、基础知识,对工业机器人机械系统的总体设计方法有初步了解,并相应的掌握一些实用工业机器人控制及规划和编程方法。 四.教学内容、学时分配及其基本要求 第一章绪论(2学时) (一)教学内容 1、工业机器人的定义、应用领域与发展; 2、工业机器人的组成、分类及技术参数。 (二)基本要求 1、明确本课程的研究对象、内容、性质、任务; 2、了解工业机器人的定义、应用领域与发展方向; 3、了解工业机器人的组成、分类及技术参数。 第二章工业机器人运动学(6学时含讲授4学时,实验2学时) 十大优秀工业机器人系统集成商 分析 十大优秀工业机器人系统集成商分析 工业机器人产业是一个集系统集成、先进制造和精密配套融合一体的产业,是一个需要技术、制造、研发沉淀经验的行业。从我国机器产业链发展来看,由于受核心技术限制等多方面因素影响,我国工业机器人产业目前获得突破的主要为系统集成领域。国内一些领先企业从集成应用开始,主要借助对国内市场需求、服务等优势,逐渐脱颖而出,取得了不错的市场成绩。笔者对获得2013年十大优秀工业机器人系统集成商的发展概况及主要产品进行了简单归纳分析,以飨读者。 1、佛山市利迅达机器人系统有限公司(简称:利迅达) 佛山市利迅达机器人系统有限公司是从事机器人系统自动化集成和工业智能化设备研发、生产的高科技企业。公司筹备于2008年,于2010年4月正式成立,经过数年迅猛增长,已发展成为华南地区乃至国内规模最大,实力最强的专业工业机器人应用系统集成商。 利迅达与欧州多家高技术企业的机器人系统研发生产企业战略合作,令利迅达由一开始就在一个国际级的高起点上,再根据中国市场实际,研发出一系列具自有知识产权的全新意念的金属产品表面处理综合系统。其中“机器人打磨拉丝 系统”被评为2011年广东省高新技术产品;“机器人智能化焊接系统”被评为2012年广东省高新技术产品。公司为顺德区百家智能制造工程试点示范企业,在2013年被认定为国家级高新技术企业。 2、厦门思尔特机器人系统有限公司(简称:思尔特) 思尔特创建于2004年6月,位于厦门集美灌南工业区,是厦门市高新技术企业。思尔特多年来为中联、徐工、柳工、厦工、龙工、玉柴等多家国内大中型企业服务,设计制造出技术先进的机器人系统。 2009年,思尔特在上海成立全资子公司上海思尔特机器人科技有限公司,针对冲压机、折弯机、压铸机、弯管机、热锻机等机床的自动上下料生产线的研发、设计、制造。 2010年,思尔特决定打造西南区制造基地,于2010年7月注册成立全资子公司成都思尔特机器人科技有限公司。成都思尔特是西南地区首家专业机器人系统集成商,具有年集成200套机器人系统的能力,主营方向为汽车零部件及薄板焊接的机器人应用。 3、无锡丹佛数控装备机械科技有限公司(简称:丹佛) 无锡丹佛数控装备机械科技有限公司成立于2010年,现阶段主要经营项目分别为:abb工业机器人、韩国现代工业机器人、焊接机器人、搬运机器人、涂装机器人、机床上下料机器人、码垛机器人、焊接机器人、机器人取毛刺等等,同时为客户提供夹具设计制造及交钥匙工程。 丹佛又与几家大型的融资企业签订战略合作合伙,为那些有订单有市场而没有太多 《工业机器人》课程教学大纲 课程编号:0803701069 课程名称:工业机器人 英文名称:Industrial Robot 课程类型:专业任选课 总学时:32 讲课学时:24 实验学时:8 学分:2 适用对象:四年制机械设计制造及其自动化专业、四年制机械电子工程专业。 先修课程:高等数学、线性代数、工程制图、机械工程材料、理论力学、材料力学、机械原理、机械设计、电子技术、电工技术、机械制造基础、互换性与技术测 量、液压与气压传动、机电传动控制、单片机原理及应用、自动控制原理等。 一、课程性质、目的和任务 工业机器人课程是机械设计制造及其自动化专业各专业方向的一门主要专业技术课,是一门多学科的综合性技术,它涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多学科的内容。其目的是使学生了解工业机器人的基本结构,了解和掌握工业机器人的基本知识,使学生对机器人及其控制系统有一个完整的理解。培养学生在机器人技术方面分析与解决问题的能力,培养学生在机器人技术方面具有一定的动手能力,为毕业后从事专业工作打下必要的机器人技术基础。 二、教学基本要求 本课程以机器人为研究对象,以工业机器人为重点。学完本课程应达到以下基本要求:1.了解机器人的由来与发展、组成与技术参数,掌握机器人分类与应用,对各类机器人有较系统地完整认识。 2.了解机器人运动学、动力学的基本概念,能进行简单机器人的位姿分析和运动分析。 3.了解机器人本体基本结构,包括机身及臂部结构、腕部及手部结构、传动及行走机构等。 4.了解机器人轨迹规划和关节插补的基本概念和特点。 5.了解机器人控制系统的构成、编程语言与编程特点。 6.了解工业机器人工作站及生产线的基本组成和特点。 7.对操纵型机器人、智能机器人有一般的了解。 三、教学内容及要求 绪论 0.1概述 0.1.1机器人的由来与发展 0.1.2机器人的定义 0.1.3机器人技术的研究领域与学科范围 0.2机器人的分类 0.2.1 按机器人的开发内容与应用分类 水处理行业的自动化系统集成方案 水处理厂自动化控制系统的开发,是我们发展行业工程的一个典型应用例。本公司的系统运行可靠,水处理及自动化技术达到了国外先进水平,具有功能齐全、高度智能化、运行可靠、投资省、见效快等优点,能帮助用户取得明显的经济效益和社会效益。并且该系统对生态环境、海水资源、城市环境及旅游业等,都能起到极大的推动作用。 系统特点 1、集中式控制结构 中心控制系统在中心控制室(Center Control Room)对全厂泵站系统实施控制,每个泵站系统又相互独立,有各自专门的PLC实施控制。对泵站的控制系统控制功能有就地(Local)和远程(Remote)两种;分手动(Manul)和自动(Auto)两种操作模式,平时可根据系统设计,设定自动运行。当某一控制室和泵站某一部分出现故障时,现场的报警信号立即通过网络反馈到中心控制室,通过打印机将故障的具体信息打印出来,并根据实际情况进行操作。这样既方便,叉快捷。 2、故障诊断实时性 PLC实时监控系统的硬件运行情况,功能针对性强,查找故障方便,排除也快, 3、修改和维护方便 PLC编程容易,可以在线(Online)、离线(Offline)编程,可以用模块图、梯形图和指令图,各种方式任选,即改即用,对设计维护相当便利。 工作原理 自动调节控制系统 (1)格栅程控系统 根据格栅前后的水位差(该水位差值直接反映格栅堵塞情况),自动控制栅耙,按预定周期运行,以保证格栅正常工作。 (2)水泵程控系统 按水泵池的液位控制水泵,按预定的次序逐台开启。一台水泵不够用时,下一台水泵开启(反之亦然)。备用泵最后启动,并根据水泵的运行时间自动轮换水泵,使各水泵的运行时间均等。 (3)曝气池空气量调节系统 曝气空气量的调整,采用控制鼓风机导叶片的方式,即通过改变鼓凤机导叶片的角度来改变空气量,从而保证溶解氧的需求量。 (4)回流污泥量调节系统 回流污泥量的调节,采用比例控制方式,按进入曝气池的水量控制回流污泥泵的开启台数和回流污泥管道上阀门的角度,以保证回流污泥管道上阀门的合适比例。 课程编号: 课程名称:机器人学 《机器人学》教学大纲 一、课程的地位、性质何任务 本课程是自动化、机械类专业为培养高级工程技术应用型人才而开设的硕士研究生选修课程。面对21世纪知识经济时代的机遇与挑战,人类(地球人)正在以非凡的智慧构思新世纪的蓝图。世界的明天将更加美好。但是,地球人在发展中也面临着环境、人口、资源、战争和贫困等普遍问题,同时还要学会与机器人共处,这是21世纪地球人必须正视和处理的紧要问题,是影响地球人生存和发展的休戚与共的重大事件。 机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。自第一台电子编程工业机器人问世以来,机器人学已取得令人瞩目的成就。正如宋健教授1999年7月5日在国际自动控制联合会第14届大会报告中所指出的:“机器人学的进步和应用是本世纪自动控制最有说服力的成就,是当代最高意义上的自动化。”机器人技术的出现与发展,不但使传统的工业生产面貌发生根本性的变化,而且将对人类的社会生活产生深远的影响。 通过本课程的学习,培养学生的思维能力和严谨的求学态度,本课程的主要任务是:通过本课程的学习,使学生达到以下基本要求: (1)了解机器人的特点、结构与分类。了解机器人学的研究领域及其与人工智能的关系。 (2)掌握机器人运动方程的表示及运动方程的求解。 (3)掌握机器人动力学方程。 (4)了解机器人的基本控制原则,初步掌握机器人的位置控制和柔顺控制以及机器人的分解运动控制。 (5)了解机器人规划的作用和任务,初步认识机器人的轨迹规划问题。 (6)了解机器人编程的要求和分类、机器人语言系统的结构和基本功能。 工业机器人系统集成市场现状与特点 目前大多数国内机器人厂商业务集中于此,竞争激烈从产业链的角度看,机器人本体(单元)是机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。只有机器人裸机是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。系统集成方案解决商处于机器人产业链的下游应用端,为终端客户提供应用解决方案,其负责工业机器人软件系统开发和集成,是工业机器人自动作业的重要构成。在我国,系统集成商多是从国外购臵机器人整机,根据不同行业或客户的需求,制定符合生产需求的解决方案。 系统集成想从小做大规模并不容易。系统集成企业的工作模式是非标准化的,从销售人员拿订单到项目工程师根据订单要求进行方案设计,再到安装调试人员到客户现场进行安装调试,最后交给客户使用,不同行业的项目都会有其特殊性,很难完全复制。如果专注于某个领域,可以获得较高的行业壁垒,但这个壁垒也使系统集成企业很难跨行业去扩张,其规模也很难上去。 尽管存在诸多障碍,近年来国内还是涌现一批系统集成行业的佼佼者。国际机器人系统集成企业主要有kuka、abb、发那科、科马、锐驰机器人、徕斯等。国内涉足下游集成应用领域的上市公司包括新松机器人、博实股份、天奇股份、广州数控、埃斯顿等,其中新松机器人为国内最大的系统集成商,主要从事工业机器人及自动化成套装备系统的研发、制造。新三板公司有伯朗特、林克曼、拓斯达等。 机器集成产业现状 机器人系统集成商作为中国机器人市场上的主力军,普遍规模较小,年产值不高,面临强大的竞争压力。根据GGII的数据显示,截至2014年9月,中国机器人相关企业428家,其中系统集成商就占88%,并且从相关市场数据来看,现阶段国内集成商规模都不大,销售收入1个亿以下的企业占大部分,能做到5个亿的就是行业的佼佼者,10个亿以上的全国范围屈指可数。 一般工业是指非汽车行业。目前汽车行业的自动化程度比较高,供应商体系相对稳定。而一般工业的自动化改造需求相对旺盛。全球工业机器人集成从应用角度看“搬运”占比最高。全球工业机器人销量中,半数机器人用于搬运应用。搬运应用中又可以按照应用场景不同分为拾取装箱、注塑取件、机床上下料等。按照应用来分,占比前三的应用为搬运50%,焊接28%,组装9%。现阶段工业机器人系统集成有如下特点: 1)不能批量复制 系统集成项目是非标准化的,每个项目都不一样,不能100%复制,因此比较难上规模。能上规模的一般都是可以复制的,比如研发一个产品,定型之后就 《工业机器人技术基础》教学大纲 一、课程基本信息 课程名称:工业机器人技术基础 学时:48 适用对象: 工业机器人技术专业、电气自动化技术专业、机电一体化技术专 业 考核方式:考查 二、课程简介 机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。通过该课程的学习, 使得学生基本熟悉这门技术以及其发展状况,为今后从事工业机器人的操作管 理、维护维修、系统安装调试和集成设计的工作打下基础。 三、课程性质与教学目的 本课程是专业基础课,通过本课程的学习,使学生了解机器人及其应用,掌 握机器人系统组成、机构、运动分析、控制和使用的技术要点和基础理论。机器 人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、 控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有 一个全面、深入的认识。培养学生综合运用所学基础理论和专业知识分析问题解 决问题的能力。 第1章概述 机器人的基本概念,机器人的组成原理、机器人应用与外部的关系、机器人应用技术的现状 第2章机器人的基础知识 机器人的分类、机器人的基本术语与图形符号、机器人的技术参数、机器人的运动学基础、机器人的动力学基础 第3章机器人的机械结构系统 机器人的机械结构系统、机器人的腕部机构、机器人的手部机构、机器人的行走机构 第4章机器人的驱动系统 机器人的驱动系统概述、电动机及其特性、液压驱动系统及其特性 第5章机器人的控制系统 机器人的控制系统、伺服控制系统及其参数、交流伺服电动机的调速、机器人控制系统结构、机器人控制的示教再现、机器人控制系统举例 第6章机器人的感觉系统 机器人的传感技术、机器人的内部传感器、机器人的外部传感器、机器人的视觉系统、机器人传感器的选择 第7章机器人的语言系统 机器人的语言系统概述、常用的机器人语言简介、机器人的离线编程、机器人的编程示例 第8章工业机器人及其应用 工业机器人概述、焊接机器人、搬运机器人、喷涂机器人、装配机器人 四、各教学环节学时分配 教学环节 教学时数课程内容讲课实验 其他教学 环节 第一章概述 4 第二章机器人的基础知识 4 第三章机器人的机械结构系统 6 1 第四章机器人的驱动系统8 第五章机器人的控制系统8 第六章机器人的感觉系统8 1 第七章机器人的语言系统 6 第八章工业机器人及其应用12 一、填空题 1、工业机器人通常由执行机构、驱动系统、控制系统、传感系统四部分组成。 2、工业机器人手部工作原理不同,结构形式不同按其夹持原理不同,可以分为机械式、磁力式和真空式三种。 3、电气设备包含用于轴1至轴6电机的所有电机电缆和控制电缆。 4、工业机器人外围设施的电气连接包括防护门的电气连接、静电保护的连接。 5、工业机器人工作站集成一般包括硬件集成、和软件集成两个过程。硬件集成需要根据需要对各个设备接口进行统一定义,以满足通信要求;软件集成则需要对整个系统的信息流进行综合,然后再控制各个设备按流程运转。 6、工业机器人工作站设计过程包括可行性分析、工作站和生产线的详细设计、制造与运行、交付使用四部完成。 7、工业机器人弧焊工作站主要由机器人系统、焊枪、焊接电源、送丝机构、焊接变位机等组成。 8、焊枪导电嘴为机器人移动TCP点,机器人的运动主要由各轴单独运动、TCP点直线运动、机器人姿态运动3种运动方式。 9、安川MA1400机器人包括机器人本体、DX100控制柜、示教器组成。 10、DX100控制柜主要由控制柜冷却、电源接通单元、基本轴控制基板、CPU单元、CPS单元、断路器基板、I/O单元、机械安全单元、机器人专用输入端子台、伺服单元组成。 11、电源接通单元是由电源接通顺序基板和伺服电源接触器以及线路滤波器组成。 12、电源接通单元根据来自电源接通顺序基板的伺服电源控制信号的状态,打开或关闭伺服电源接触器,供给伺服单元电源,电源接通单元经过线路滤波器对控制电源供给电源。 13、CPU单元是由控制器电源基板与基本架、控制基板、机器人I/F单元和轴控制基板组成。 14、伺服单元主要由变频器及PWM放大器构成。 15、弧焊工作站中需要根据材质或焊缝的特性来调整焊接电压或电流的大小及是否需要摆动,用程序数据来控制这些变化的因素通过设定焊接参数、起弧收弧参数、摆弧参数来实现。 16、盛放二氧化碳气体的气瓶一般分为飞虹吸式、虹吸式两种。 17、弧焊专用基板是DX100控制柜与焊接电源连接交换信息,弧焊基板具有2路模拟输出、2路模拟输入、以及焊接电源的输入输出状态信号。 18、机器人与焊接电源的接口信号一般需要包括对焊接电源状态的控制、对焊接参数的控制、焊接电源给机器人的反馈信号三种功能。 19、DX100控制柜电源连接漏电断路器,要使用可防止高频的漏电断路器,它能防止整流器的高频漏电流引起的误动作。 20、专用输入输出信号的功能是机器人系统预先定义好的,当外部操作设备作为系统来控制机器人及相关设备时,要使用专用输入输出。 21、通用输入输出主要是在机器人的操作程序中使用,作为机器人和周边设备的即时信号。 22、工业机器人点焊工作站由机器人系统、伺服机器人焊钳、冷却水系统、电阻焊接控制器装置、焊接工作台等组成。 23、电极材料具有足够高的导电率、热导率和高温硬度的制造要求。 24、点焊电极的结构可分为标准直电极、弯电极、帽式电极、螺纹电极、和复合电极五种。 25、点焊机器人控制系统由本体控制部分及焊接控制部分组成。本体控制部分主要实现示教在线、焊点位置及精度控制,控制分段的时间及程序转换,还通过改变主电路晶闸管的导通角而实现焊接电流控制。 26、目前使用的机器人点焊电源主要由单相工频交流点焊电源和逆变二次整流式点焊电源两种。 自动化与系统集成培训 一、前言 随着数字信息化的发展,生产设备自动化程度的提高,需进一步提高职工技能水平,培养更多的复合型人才和专业型人才。本公司培训中心是一个专业技术培训机构,重点推出了自动化与系统集成工程师综合能力的培训,使维修工程师尽快掌握控制系统方案设计和软硬件调试维修技能水平,有设计安装工程项目经验的老师指导教学,设备齐全。培训中心还以系统设计问题解决和到厂办班现场指导的方式,结合参加人员的素质进行策划与设计课程来培训,教学方法形式多样化、个性化。 本公司培训中心主办“自动化与系统集成”培训班的特点:是结合生产线上的电气设备,进行有针对性、有效实用性的培训。 二、目标要求 1、培训目标 通过学习使职工深刻领会到认真学习竞聘上岗的精神和统一认识;掌握生产设备的工作原理,先进的电气自动化控制技术知识;以及提高职工的维修技能水平;同时还可解决厂引进人才和留住人才难的问题,为企业的发展战略、结构调整、人才储备运作奠定扎实的基础。 2、培训要求 通过培训使学员掌握电气自动化控制技术知识和设计、维修技能水平,根据针对性、有效性的培训原则。要求培训结束后,使职工能处理日常维修事务,并解决实际问题。 三、课程安排 根据问题型培训的针对性、有效性的培训原则,使学员在今后工作中能有效的应用学习的知识和实际操作能力。培训班的总体安排如下: 3、课程内容:详见计划培训课程表; 4、交流交流:组织交流会的目的,是为了巩固所掌握的知识和交流维修经验; 5、培训考评:培训结束后,设立考评; 6、培训场地:由上海深洋科技发展有限公司自己提供教学场地和必备的教学器材。 四、授课内容 培训课程策划设计主要以理论和实践相结合。(详见课程内容和时间进度表) SIMA TIC S7系统、维护和编程课程内容 ?熟悉PLC I/O信号模块 ?掌握PLC 的硬件安装和地址分配 ?Spet7程序的结构、生成、文档和运行 ?用Spet7工具生成软件、归档和测试程序 ?使用符号地址和绝对地址 ?Spet7诊断PLC的系统信息和故障诊断 ?处理数据类型、数据存储与归档 ?用STEP7工具软件对CPU与模板进行组态与参数化 ?处理模拟模板和模拟量值(案例) ?编程所需的基本指令(案例) ?编制和使用可组态的块(案例) ?各种OB程序块的应用(案例) 最新工业机器人工作站系统集成技术教学大纲 工业机器人工作站系统集成技术 一、说明 1.课程的性质和内容 《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。 二、学时分配表 三、课程内容及要求 教学要求 1.了解工业机器人码垛工作站的组成。 2.掌握码垛工作站的机械装配。 3.掌握码垛工作站系统编程。 教学内容 任务1 认识码垛工业机器人工作站 任务2 筛选皮带机构的组装、接线与调试 任务3 立体码垛单元的组装、程序设计与调试 任务4 步进升降机构的组装、接线与调试 任务5 检测排列单元的程序设计与调试 任务6 机器人单元的程序设计与调试 任务7 机器人自动换夹具的程序设计与调试 任务8 机器人轮胎码垛入仓的程序设计与调试 任务9 机器人车窗分拣及码垛程序设计与调试 任务10 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 模块二工业机器人涂胶装配工作站系统集成 教学要求 1.了解工业机器人涂胶工作站的组成。 2.掌握涂胶工作站的机械装配。 3.掌握涂胶工作站系统编程。 教学内容 任务1 认识涂装工业机器人 任务2 上料涂胶单元的组装、程序设计与调试 任务3 多工位旋转工作台的组装、程序设计与调试 任务4 机器人单元的程序设计与调试 任务5 机器人自动换夹具的程序设计与调试 任务6 汽车车窗框架预涂胶的程序设计与调试 任务7 机器人拾取车窗并涂胶的程序设计与调试 任务8 机器人装配车窗的程序设计与调试 任务9 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对涂胶工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 《机器人技术》教学大纲 一、课程基本信息 课程代码:050361 课程名称:机器人技术 英文名称:Robot Techniques 课程类别:专业选修课 学时:36 学分: 2 适用对象: 机械电子工程专业(本科) 考核方式:考查 先修课程:《微机原理》,《电工电子学》,《机械设计基础》,《可编程控制器原理》二、课程简介 机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。通过该课程的学习,使得学生基本熟悉这门技术以及其发展状况,为今后从事光机电一体化与系统设计、制造的研究工作打下基础。 Robotics is a new interdiscipline, Robot techniques include mechanics, mechanics, biology, anthropology, computer science, project, cybernetics and controlling engineering, electronic engineering, artificial intelligence, sociology,etc., It is a comprehensive technology. Through studying this course, the students can be familiar with this technology and the development state, and make the foundation in optical, mechanical and electronic integration and research work including system design and manufacture in the future. 三、课程性质与教学目的 本课程是机械电子工程的专业选修课,通过本课程的学习,使学生掌握机器人机构设计、运动分析、控制和使用的技术要点和基础理论。机器人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有一个全面、深入的认识。培养学生综合运用所学基础理论和专业知识进行创新设计的能力。·工业机器人工作站系统集成技术教学大纲教学文案
变配电自动化系统集成设计
工业机器人工作站系统集成-B(答案)
《工业机器人》课程教学大纲.
工业机器人系统集成篇
自动化系统集成的发展趋势
机器人上下料工作站
45《工业机器人》课程教学大纲
十大优秀工业机器人系统集成商分析
0803701069《工业机器人》教学大纲
水处理行业的自动化系统集成方案
机器人教学大纲
工业机器人系统集成市场现状与特点
《工业机器人技术基础》教学大纲
工业机器人系统集成题库
自动化与系统集成培训
最新工业机器人工作站系统集成技术教学大纲
《机器人技术》教学大纲