执行2009版_全球定位系统_GPS_测量规范_若干问题的研究_谭世波

gps全球定位系统规范
竭诚为您提供优质文档/双击可除gps全球定位系统规范 篇一:全球定位系统gps测量规范(20xx)不合理之处 a:最近遇到一个关于规范上的问题,全球定位系统gps 测量规范上有这么一个规定,静态基线处理时,关于基线弦长中误差,固定误差a与b只能采用仪器的标称精度,问题随之而来,如果某些不良商家给自己的标称精度很高,比如5+1,而旧规范可以引用10+1,旧规范容易通过精度评定,而新规范就太难了。新规范那岂不是太坑人了吧? 新规范要求是这样的 旧规范要求是这样的 太坑人了,不管bcde级,都得按照仪器标称精度来评定,很不合理。 如果这么考虑问题的话,今后的一级或者二级导线就不是按照固定的相对误差来评定了,而是与仪器的标称精度有关了。如果真这样的话,说不定低精度的仪器可以通过精度评定,高精度仪器测得的导线成果反而通不过了。 毕竟,仪器鉴定单位并没有对商家的标称精度a与b给出具体的鉴定数值,或者对商家提供的标称精度给出合理与
否,真是与否的结论 另外,规范允许在基线处理时运用商家的提供的随机处理软件,而很多随机处理软件本身就有很多致命性错误。这再次让不良的仪器 厂家钻漏洞,夸大自己仪器标称精度的同时,商家开发出来的软件又低门槛地允许通过很多不合格基线通过了精 度评定。 b:旧规范就是很合理的,比如 c: 问题是,新规范中 ,我就不知道在做d级gps测量时,a与b的具体取值了,按照新规范要求,我使用的仪器不同,a与b的具体取值就会不同。这样的话,我如果拿到一批仪器,假如商家的标称精度为:a=5,b=1ppm,标称精度很高(但是仪器鉴定单位并没有对商家的标称精度a与b给出具体的鉴定数值,或者对商家提供的标称精度给出合理与否,真实与否的结论。)仪器的真实精度是这样的:a=10,b=5ppm,这样的话,我用这批仪器在做d级gps控制测量内业精度评定时,运用a=5,b=1ppm,不能通过精度评定;运用真实的标称精度a=10, b=5ppm,我就很容易通过精度评定了。 篇二:公路全球定位系统(gps)测量规范 1总则
GPS定位仪通用技术规范
国家电网公司物资采购标准 (大地测量、测距仪器卷 GPS定位仪册) GPS定位仪 通用技术规范 (编号:1311014-0000-00) 国家电网公司 二〇一六年四月
目录 1总则.............................................................................................................................错误!未定义书签。 2 性能要求.....................................................................................................................错误!未定义书签。 3 主要技术参数.............................................................................................................错误!未定义书签。 4 外观和结构要求.........................................................................................................错误!未定义书签。 5 验收及技术培训.........................................................................................................错误!未定义书签。 6 技术服务.....................................................................................................................错误!未定义书签。附录A 供货业绩 ............................................................................................... 错误!未定义书签。
GPS规范
《全球定位系统(GPS)测量规范》GB/T18314-2009 表3-1 最简异步环或附和路线的边数的规定表3-2
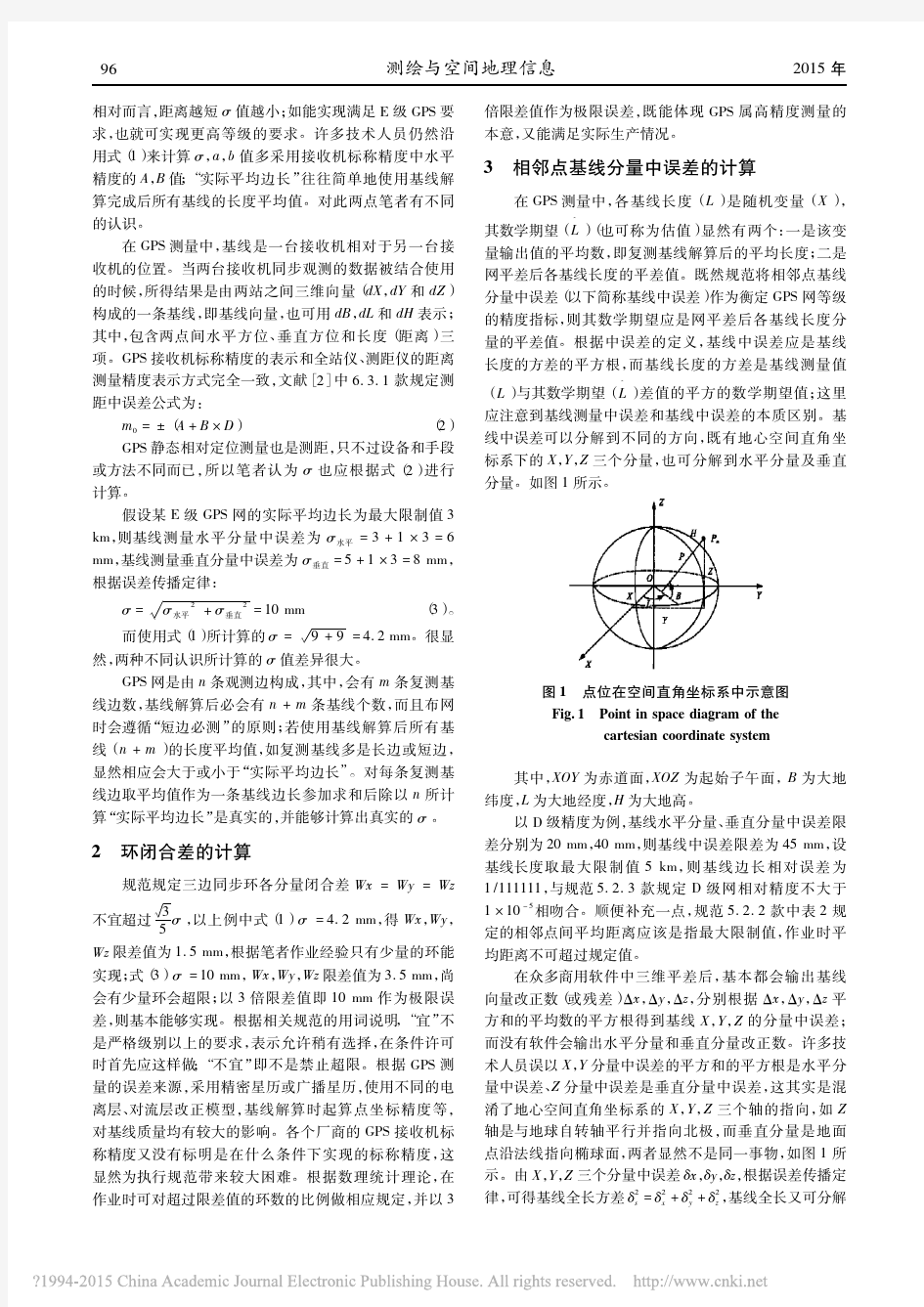
GPS 测量各等级作业的基本技术要求 表3-4 下面各项限差规定中使用的σ())((22bd a +=σ采用外业测量时使用的GPS 接收机的标称精度,计算时边长d 按实际平均边长计算。) 同步环闭合差限差(对于4站以上同步观测时段,在处理完各边观测值后,应检查一切可能的三边环闭合差) σω53x ≤ , σω53y ≤, σω53z ≤, σω5 3 ≤ 同步环只计算三边同步环,ω—环闭合差,2 2 2 z y x ωωωω++= 异步环闭合差或附合路线坐标差限差ω及坐标分量闭合差应满足下列要求 σωn 3x ≤, σωn 3y ≤, σωn 3z ≤, σωn 33≤ n —独立环的边数,ω—环闭合差,22 2z y x ωωωω++= 重复基线限差 复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长 计算) 三维无约束平差中,基线分量的改正数(X V ?,Y V ?,Z V ?)绝对值应满足下列要求
σ?3V X ≤,σ?3V Y ≤,σ?3V Z ≤ ))((22bd a +=σ d 按照基线边长计 算 约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线,相应改正数较差的绝对值应满足下列要求(C 、D 、E 级网平差后,其精度应符合表3-1规定,国家三、四等大地控制网的B 、C 、D 级,其相对精度应分别不低于1×10-7、1×10-6、1×10-5。) σ?2dV X ≤,σ?2dV Y ≤,σ?2dV Z ≤ ))((22bd a +=σ d 按照基线边长计算
全球导航卫星系统测量规范
竭诚为您提供优质文档/双击可除全球导航卫星系统测量规范 篇一:测绘规范目录(20xx) 现行测绘标准目录(20xx年版) 篇二:Rtk测量规范(试行) 中华人民共和国****标准 ** ******-**** 全球定位系统实时动态(Rtk)测量 技术规范 (征求意见稿) *****发布 目次 前言…………………………………………………………………………………………………..i引言…………………………………………………………...…………………………………….ii1范围.................................................
...........................12引用标准................................................. .......................13术语................................................. ...........................14坐标系统、高程系统和时间系统................................................. ...35Rtk控制测量技术要求................................................. ............36Rtk地形测量技术要求................................................. ............77仪器设备的要求................................................. .................98资料提交和成果验收................................................. .............10附录a2000国家大地坐标系地球椭球参数...........................................11附录b平面控制标石埋设................................................. .........12附录c参考点的转换残差及转换参数表. (14) 附录dRtk测量参考站观测手
全球定位系统(GPS)术语及定义
全球定位系统(GPS)术语及定义 全球定位系统(GPS)术语及定义 【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:15 1范围 本标准规定了全球定位系统(GPS)常用术语及定义。 本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。 2通用术语 2.1 全球定位系统global positioning system(GPS) 导航星navigation by satellite timing and ranging(NA VSTAR) 一种卫星导航定位系统。由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。 2.2 全球导航卫星系统global navigation satellite system(GLONASS) 一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。包括军用和民用两种服务。 2.3 伽利略系统Galileo system 一种民用全球卫星导航系统; 2.4 全球导航卫星系统global navigation satellite system(GNSS) 由国际民航组织提出的概念。GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。并将由多国民间参与运行和控制的卫星导航系统。GNSS也已经为国际海事组织(IMO)所接受。欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。 2.5 静地星/定位星系统Geostar/Locstar system 一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。 2.6 海军导航卫星系统navy navigation satellite system(NNSS) 子午仪Transit 是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。 注:已于l997年12月31日关闭。 2.7 国际GPS动力学服务international GPS geodynamics service(IGS) 国际大地测量协会于1994年创立的国际GPS研究服务机构。它负责向世界各国的GPS 用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息。
公路全球定位系统(GPS)测量规范
1总则 1.0.1为规定利用全球定位系统(GlobalPositioningSRstem, 缩写为GPS)建立公路工程 GPS测量控 制网的原则、精度和作业方法,特制定本规范。 1.0.2本规范是依据《公路勘测规范》(JTJ061 ),并参照《全球定位系统(GPS测量规范》(CH20RR-92 的有关规定,在收集、分析、研究和总结经验的基础上制定的。 1.0.3本规范适用于新建和改建公路工程项目的各级GPS控制网的布设与测量。 1.0.4采用全球定位系统测量技术建立公路平面控制网时,应根据《公路勘测规范》(JTJ061 )中规定的平面控制测量的等级、精度等确定相应的GPS控制网的等级。 1.0.5GPS测量采用WGS-84大地坐标系。当公路工程GPS控制网根据实际情况采用1954年北京坐标 系、1980西安坐标系或抵偿坐标系时,应进行坐标转换。各坐标系的地球椭球基本参数、主要几何和物理常数见附录 A. 高程系统根据实际情况可采用1956年黄海高程系或1985国家高程基准. 1.0.6GPS测量时间系统为协调世界时(UTC).在作业过程中,附录D"GPS观测手薄"中的开、关机时间可采用北京时间记录. 1.0.7GPS接收机及附属设备均按有关规定定期检测 . 1.0.8GPS控制测量应按有关规定对全过程进行质量控制 1.0.9在提供GPS控制测量成果资料时,应执行保密制度中的有关规定. 2术语 2.0.1 基线 Baseline 两测量标志中心的几何连线。 2.0.2 观测时段 Observationsession GPS接收机在测站上从开始接收卫星信号进行观测到停止观测的时间长度。 2.0.3 同步观测 Simultaneousobservation 两台或两台以上 GPS接收机同时对一卫星进行的观测。 2.0.4 同步观测环 Simultaneousobservation 三台或三台以上 GPS接收机同步观测所获得的基线向量构成的闭合环。 2.0.5 独立基线 Independentbaseline 由独立观测时段所确定的基线。 2.0.6 独立观测环 Independentobservableloop 由独立基线向量构成的闭合环。 2.0.7 自由基线 Freebaseline 不属于任何非同步图形闭合条件的基线。 2.0.8 复测基线 Duplicatemeasurebaseline 观测两个或两个以上观测时段的基线。 2.0.9 边连式 LinkmethodbRabaseline 相邻图形之间以一条基线边相连接的布网方式。 2.0.10 无约束平差 Non-constrainedadjustment 在一个控制网中,不引入外部基准,或虽引入外部基准但并不产生控制网非观测误差引起的变形和改正的平差方法。 2.0.11 公路抵偿坐标系 Compe nsatio ncoordi natesRstemforhighwaR 在建立公路控制网时,根据需要投影到抵偿高程面上和(或)以任一子午线为中央子午线的一种直角坐标系。2.0.12 首级控制网 Firstclasscontrolnetwork 为一个公路工程项目而建立的精度等级最高,并同国家控制 点联测能控制整个路线的控制网。 2.0.13 主控制网 Mai neon trol network 为满足公路测设放线或施工放样,在首级控制网基础上加密 并贯通整条公路的控制网。 2.0.14 天线高 Antennaheight 观测时天线平均相位中心标志面的高度。 3GPS控制网分级与设计 3.1GPS控制网分级 3.1.1根据公路及桥梁、隧道等构造的特点及不同要求,GPS控制网分为一级、二级、三级、四级共
动力定位(DP)系统简介知识分享
动力定位(D P)系统简 介
动力定位(DP)系统简介 作者:王卫卫 来源:《广东造船》2014年第01期 摘要:随着海洋工程项目的蓬勃发展,动力定位系统(简称DP系统)的应用已越来越广泛。本文对DP系统等级、工作原理以及根据船级社不同入级符号的设备配置等作了简单的介绍,希望能够对大家以后的开发设计及生产有所帮助。 关键词:DP;入级符号;特点;工作原理 中图分类号:P751文献标识码:A Investigation of Dynamic Positioning System WANG Weiwei ( Guangzhou Shipyard International Co., Ltd. Guangzhou 510382 ) Abstract: The application of Dynamic Positioning System (DP system) is more and more popular because of development of ocean project. The article introduce the level of DP system, work principle, the requirement of equipment according to different DP notations. I hope it is helpful to exploder, design and production in the future. Key words: DP;Classification notation;characteristic;work principle 1前言 动力定位系统(Dynamic Positioning System)简称DP系统,是从上个世纪70年代逐渐发展起来的,并逐步由浅水海域向深水海域发展,应用于各种海洋工程、海上科考、水下工程等领域。随着船舶自动化程度越来越高,DP系统的定位能力以及自动化程度也越来越高,而以上各类领域的工程项目也越来越离不开带有DP系统的海上钻井平台和船舶。本文简要介绍DP系统的工作原理,以及根据船级社不同入级符号对DP系统的等级和不同等级下设备的配置。 2DP系统工作原理 IMO给出的DP船舶定义为:仅靠推力器的推力作用能够自动保持船舶位置(固定位置或者预定航迹)的船舶。 DP系统的工作原理:由于海上海浪、风速、风向的影响,船舶或者平台在海上必然会产生移动,DP系统就是利用计算机软件对采集到的周围的环境因素如水流、风速、风向、海浪等,根据位置参照系统(GPS、罗经等)进行汇总计算后不断控制调整船舶或者平台上的各个推力器的大小和方向,从而使得船舶或者平台保持事先设定的位置。
GPS测量规范2009
目次 1范围…………………………………………… 1 范围 (3) (1) 2规范性引用文件 (1) 3术语和定义 (1) 4基本规定 (2) 5级别划分和测量精度 (2) 5.1级别划分 (2) 5.2测量精度 (2) 5.3用途 (3) 6布设的原则 (3) 6.1基本原则 (3) 6.2 GPS点命名 (4) 6.3技术设计 (4) 7选点 (4) 7.1选点准备 (4) 7.2点位基本要求 (4) 7.3辅助点与方位点..........................................................................4 7.4选点作业 (5) 7.5选点后应上交的资料 (5) 8埋石 (5) 8.1标石 (5) 8.2埋石作业 (5) 8.3标石外部整饰 (6) 8.4关键工序的控制 (6) 8.5埋石后上交的资料 (6) 9仪器 (6) 9.1接收机选用 (6) 9.2仪器检验 (6) 9.3仪器维护 (7) 10观测 (7) 10.1基本技术规定 (7) 10.2观测区的划分 (7) 10.3观测计划 (8) 10.4观测前的准备 (8) 10.5观测作业的要求 (8) 11外业成果记录 (9) 11.1 A级GPS网外业成果记录 (9) 11.2 B、C、D、E级GPS网外业成果记录 (9)
12数据处理 (9) 12.1基本要求 (9) 12.2外业数据质量检核 (9) 12.3基线向量解算 (10) 12.4 A、B级GPS网基线处理结果质量检核 (11) 12.5重测和补测 (11) 12.6 GPS网平差 (12) 12.7数据处理成果整理和技术总结编写................................................l3 13成果验收与上交资料.....................................................................l3 13.1成果验收 (13) 13.2上交资料 (13) 附录A(资料性附录)大地坐标系有关说明………………………………………l4 附录B(规范性附录)选点与埋石资料及其说明………………………………l5 附录C(规范性附录)气象仪表的主要技术要求…………………………………l9 附录D(规范性附录)测量手簿记录及有关要求 (20) 附录E(资料性附录)归心元素测定与计算 (23) 附录F(规范性附录) 同步观测环检核……………………………………………
《全球定位系统(GPS)测量规范》复习
《全球定位系统(GPS)测量规范》复习 1. GPS测量观测时,各级网点可视情况设立与其通视的方位点,方位点目标明显,且距网点的距离一般不少于()m。 A.100 B.200 C.300 D.500 答案:【C】解析:详见《全球定位系统(GPS)测量规范》7. 3. 2规定。各级GPS网点可视情况设立与其通视的方位点,方位点目标明显,观测方便,方位点距网点的距离一般不小于300 m。 2. 按现行《全球定位系统(GPS)测量规范》,对于D级GPS网的高程联测要求为()。A.可依具体情况B.需按一定比例联测 C.需逐点联测D.根据区域似大地水准面精化要求 答案:【A】解析:详见《全球定位系统(GPS)测量规范》6. 1. 7规定。A、B级应逐点联测,C级根据区域似大地水准面精化要求联测,D、E级可依具体情况联测高程。 3. 按现行《全球定位系统(GPS)测量规范》,GPS观测期间,不应在天线附近()m 以内使用电台。 A.10 B.20 C.50 D.100 答案:【C】解析:详见《全球定位系统(GPS)测量规范》10. 5. 10规定。 4. 按现行《全球定位系统(GPS)测量规范》,GPS观测期间,不应在天线附近()m 以内使用对讲机。 A.10 B.20 C.50 D.100 答案:【A】解析:详见《全球定位系统(GPS)测量规范》10. 5. 10规定。 5. 为了防止多路径效应和数据链的丢失,基准站()m范围内应无电视台、微波站、电台等无线电发射源。 A.50 B.100 C.200 D.300 答案:【C】解析:详见《全球定位系统(GPS)测量规范》7. 2. 1规定。 6. 在局部补充,加密低等级的GPS网点时,采用高等级GPS网点点数应不少于()个。 A.2 B.3 C.4 D.5 答案:【C】解析:详见《全球定位系统(GPS)测量规范》6. 1. 10规定。 7. 新布设的GPS网应与附近已有的国家高等级GPS点进行联测,联测点数不应少于()个。 A.2 B.3 C.4 D.5 答案:【B】解析:详见《全球定位系统(GPS)测量规范》6. 1. 5规定。 8. 非基岩的A、B级GPS点的附近埋设辅助点,并测定其与该点的距离和高差,其精度应优于()mm。 A.±0. 5 B.±1. 0 C.±2. 0 D.±5. 0 答案:【D】解析:详见《全球定位系统(GPS)测量规范》7. 3. 1规定。 9. 按现行的《全球定位系统(GPS)测量规范》,对于GPS点位的命名,下列说法错误的是()。 A.GPS点名以该点位所在地命名,无法区分时可在点名后加注(一)、(二)等予以区别B.新旧点重合时,应采用新点名;点编号按旧点号的最大编号续编,重新设置后并注明C.点名书写应规范准确,如与水准点重合时,应在新点名后以括号注明水准点等级及编号
DNV动力定位规范
RULES FOR CLASSIFICATION OF D ET N ORSK E V ERITAS Veritasveien 1, NO-1322 H?vik, Norway Tel.: +47 67 57 99 00 Fax: +47 67 57 99 11SHIPS NEWBUILDINGS SPECIAL EQUIPMENT AND SYSTEMS ADDITIONAL CLASS PART 6 CHAPTER 7 DYNAMIC POSITIONING SYSTEMS JANUARY 2004 This booklet includes the relevant amendments and corrections shown in the July 2007 version of Pt.0 Ch.1 Sec.3. CONTENTS PAGE Sec.1General Requirements (5) Sec.2General Arrangement (11) Sec.3Control System (15) Sec.4Thruster Systems (18) Sec.5Power Systems (19) Sec.6Environmental Regularity Numbers (21)
CHANGES IN THE RULES Comments to the rules may be sent by e-mail to rules@https://www.360docs.net/doc/399124568.html, For subscription orders or information about subscription terms, please use distribution@https://www.360docs.net/doc/399124568.html, Comprehensive information about DNV and the Society's services is found at the Web site https://www.360docs.net/doc/399124568.html, ? Det Norske Veritas Computer Typesetting (FM+SGML) by Det Norske Veritas Printed in Norway If any person suffers loss or damage which is proved to have been caused by any negligent act or omission of Det Norske Veritas, then Det Norske Veritas shall pay compensation to such person for his proved direct loss or damage. However, the compensation shall not exceed an amount equal to ten times the fee charged for the service in question, provided that the maximum compen-sation shall never exceed USD 2 million. In this provision "Det Norske Veritas" shall mean the Foundation Det Norske Veritas as well as all its subsidiaries, directors, officers, employees, agents and any other acting on behalf of Det Norske Veritas. General. The present edition of the rules includes additions and amendments decided by the board in November 2003, and supersedes the January 2003 edition of the same chapter. The rule changes come into force on 1 July 2004. This chapter is valid until superseded by a revised chapter. Supple-ments will not be issued except for an updated list of minor amend-ments and corrections presented in Pt.0 Ch.1 Sec.3. Pt.0 Ch.1 is normally revised in January and July each year. Revised chapters will be forwarded to all subscribers to the rules.Buyers of reprints are advised to check the updated list of rule chap-ters printed Pt.0 Ch.1 Sec.1 to ensure that the chapter is current. Main changes —Steering gears shall be designed for continuous operation when they form part of the DP-system. Testing requirements to steer-ing gear shall also be specified. —The specific requirement for certification of UPS used for DP control systems is removed. Certification of UPSs now shall fol-low main class requirements in Pt.4 Ch.8 Electrical Systems.—Requirement for certification of the independent joystick system required for notations DYNPOS-AUT , DYNPOS-AUTR and DYNPOS-AUTRO introduced. —The new rules give opening for one of the three gyros required for notation DYNPOS-AUTR and DYNPOS-AUTRO to be re-placed by a heading device based upon another principle, as long as this heading device is type approved as a THD (Transmitting Heading Device) as specified in IMO Res. MSC.116 (73). — The possibility for letting the independent joystick system use the same redundant network as the DP control system is re-moved. In the new rules the independent joystick system may share the communication link with the manual control, but not with the DP-control system. —More specific requirements to the effect of failures in the inde-pendent joystick control system. —Power supply for the independent joystick system is now re-quired to be independent of the DP control system UPSs. —The input power supply to the redundant UPSs is now required derived from different sides of the main switchboard. — Specification of power supply arrangement for position reference systems (PRS). The requirement is now that the power supply shall be in line with the overall redundancy requirements. PRSs shall still be powered from UPS. —The requirement for full separation between fuel oil systems de-signed with redundancy for notation DYNPOS-AUTR is clari-fied. —The new rules require FMEAs for Power Management Systems.— Requirement for DP-Control centre arrangement and layout doc-umentation is introduced. Corrections and Clarifications In addition to the above stated rule requirements, a number of correc-tions and clarifications have been made in the existing rule text.
铁路工程卫星定位测量规范-条文
《铁路工程卫星测量规范》条文说明 1.0.1本规范是以现行的《新建铁路工程测量规范》、《新建铁路摄影测量规范》规定的测量精度为标准,充分考虑经实践证明铁路卫星测量能够达到的精度,采纳了路内各勘察设计院、工程局、以及铁路局的技术开发成果和作业技术规定编制而成的,适用于不同等级铁路、不同勘察阶段和不同用途的卫星测量工作。 1.0.4卫星接收机的定期检验鉴定,是国家强制性标准,各单位除认真执行外。在一个项目开始测量之前,为了解经过长途运输之后,仪器及设备工作状态是否正常,规定在现场进行接收机比长测量和附属设备的检验校正。 1.0.5本条规定除符合本规范的规定外,尚应符合国家和铁道部现行有关强制性标准的规定。这些标准包括: TB 10101─99 新建铁路工程测量规范 TB 10050—97新建铁路摄影测量规范 TBJ 101-88 既有铁路测量技术规则 《客运专线铁路无碴轨道工程测量暂行规定》(铁建设[2006]189号)GB/T18314—2001 全球定位系统(GPS)测量规范 CH 8016-1995全球定位系统(GPS)测量型接收机检定规程 CH 1002-1995测绘产品检查验收规定 GB 12896-1991 国家三、四等水准测量规范 GB 50026-93 工程测量规范 GB/T17942-2000国家三角测量规范 3.1.2 、3.1.4 卫星相对定位获取的是WGS-84坐标系中的三维坐标向量(△
X、△Y、△Z),反映了WGS-84坐标系的指向和尺度,不能用于铁道工程的施工。施工坐标系与独立坐标系本质上同属于独立坐标系。习惯使用的桥、隧施工坐标系是一般的平面坐标系,实质上讲是一个经过坐标平移和旋转的自定义椭球(工程椭球)的高斯投影坐标系。计算自定义椭球的高斯投影坐标需要确定自定义椭球的基本参数和中央子午线经度。而自定义椭球参数的计算需要测区平均高程异常,工程平均高程,以及施工坐标系的起算点假定坐标和工程主轴的坐标方位角。经过秦岭特长铁路隧道等十多座特长隧道和特长桥梁的工程验证表明,基于工程椭球建立施工坐标系是适宜的。本条规定了建立工程施工坐标系所需的各个参数,以保证转换精度。 3.1.3 、3.1.4利用卫星测量技术进行铁路工程测量时,为满足工程设计的需求,往往需要将WGS-84坐标转换成1954年北京坐标系或者1980西安坐标系的坐标或者工程独立坐标。铁路线路测量过去常采用国家统一的高斯正形投影3°带平面直角坐标系统。因为铁路是沿地面修建的,在我国中、西部地区地势高,线路横跨多个投影带,地面长度测量值与测量坐标反算值之间差别大(如青藏线,长度变形高达0.6m/km),投影误差不能满足工程放样的精度要求。因此,应合理设计铁路坐标系统,使这种变形在工程放样误差中可以忽略不计;同时,高等级铁路(客运专线、高速铁路、磁悬浮)的工程放样的精度与一般铁路相比有一定提高,把投影误差的影响限制到更小也是必要的。因此,仅仅规定采用1954年北京坐标系或1980西安坐标系是不妥当的,已不能满足工程建设的需要。所以,本条规定了“应根据工程的地理位置和高程变化情况,按工程放样精度对投影误差的要求选择坐标系”。
《GPS定位测量》标准
《GPS定位测量》课程标准 1课程定位 《GPS定位测量》是引入了《全球定位系统GPS测量规范》GB/T18314-2001、《全球定位系统城市测量技术规程》CJJ73-97、《公路全球定位系统(GPS)测量规范》JTJ/C066-98等技术规范;GPS(GlobalPositioningSystem,全球定位系统)测量定位技术现已广泛应用于国民经济建设的各个领域,并积极引领着测绘科学技术的新发展,代表了工程测量技术的先进性和高科技性,在现代测绘科学技术教学中处于重要地位;本课程的任务如下:教会学生使用GPS测量仪器设备进行控制测量及数据处理、数字测图、施工测量与放样;本课程在《地形测量》、《控制测量》、《数字测图》课程之后开设,与《工程勘测规划测量》、《工程施工测量》课程同时开设,其后续课程为《土地调查与地籍测量》、《摄影测量外业》、《工程变形测量》。 2工作任务与课程目标 2.1工作任务及职业能力 学生在进行GPS定位测量时,要依据测量工作“先整体后局部”、“先控制后碎部”的基本原则,完成GPS控制测量数据采集与处理,熟练运用GPS-RTK (RealTimeKinematic,实时动态)技术进行数字测图,同时理解CORS (ContinuousOperationalReferenceSystem,连续运行参考站系统)技术的工作原理,在实践中熟练运用CORS技术进行施工测量与放样。 通过本专业岗位需求分析,确定工作领域、施工测量与放样工作任务和职业能力,并针对GPS定位测量这一工作领域的控制测量数据采集与处理、数字测图、工作任务和对应的职业能力,按照基于工作过程、任务引领知识的教学思路整合课程内容,设计学习项目,采用案例教学、项目导向、任务驱动等教学方法,通过项目教学,使学生能够完成工作任务,提交合格的测绘成果。《GPS定位测量》课程工作任务及职业能力分析见表1。
船舶动力定位技术简述
1.动力定位技术背景 1.1 国外动力定位技术发展 目前,国际上主要的动力定位系统制造商有Kongsberg公司、Converteam公司、Nautronix公司等。 下面分别介绍动力定位系统各个关键组成部分的技术发展现状。 1.动力定位控制系统 1)测量系统 测量系统是指动力定位系统的位置参考系统和传感器。国内外动力定位控制系统生产厂家均根据船舶的作业使命选择国内外各专业厂家的产品。位置参考系统主要采用DGPS,水声位置参考系统主要选择超短基线或长基线声呐,微波位置参考系统可选择Artemis Mk 4,张紧索位置参考系统可选择LTW Mk,激光位置参考系统可选择Fanbeam Mk 4,雷达位置参考系统可选择RADius 500X。罗经、风传感器、运动参考单元等同样选择各专业生产厂家的产品。 2)控制技术 20世纪60年代出现了第一代动力定位产品,该产品采用经典控制理论来设计控制器,通常采用常规的PID控制规律,同时为了避免响应高频运动,采用滤波器剔除偏差信号中的高频成分。 20世纪70年代中叶,Balchen等提出了一种以现代控制理论为基础的控制技术-最优控制和卡尔曼滤波理论相结合的动力定位控制方法,即产生了第二代也是应用比较广泛的动力定位系统。 近年来出现的第三代动力定位系统采用了智能控制理论和方法,使动力定位控制进一步向智能化的方向发展。智能控制方法主要体现在鲁棒控制、模糊控制、非线性模型预测控制等方面。 2001 年5 月份,挪威著名的Kongsberg Simrad 公司首次展出了一项的新产品—绿色动力定位系统(Green DP),将非线性模型预测控制技术成功地引入到动力定位系统中。Green DP 控制器由两部分组成:环境补偿器和模型预测控制器。环境补偿器的设计是为了提供一个缓慢变化的推力指令来补偿一般的环境作用力;模型预测控制器是通过不断求解一个精确的船舶非线性动态数学模型,用以预测船舶的预期行为。模型预测控制算法的计算比一般用于动力定位传统的控制器设计更加复杂且更为耗时,主要有三个步骤:1.从非线性船舶模型预测运动;2.寻找阶跃响应曲线;3.求解最佳推力。控制器结构如图所示[1]: 图1.1Green-DP总体控制图
e等gps静态测量规范
竭诚为您提供优质文档/双击可除e等gps静态测量规范 篇一:gps静态控制测量外业操作指南 gps控制测量外业作业要求及技术指南 一:外业观测作业人员操作内容 安置接收机天线(严格对中整平、定向、量取仪器高)、设置接收机中的参数(如观测模式、截止高度角、和采样间隔等;如不设参数,接收机一般就采用缺省值),以及开机、关机等工作,其他工作由接收机自动完成。 二:操作流程:【选点与埋石——gps接收机的检查——观测方案设计——观测作业——外业观测成果质量检核】 1.选点准备: 根据收集的测区内及周边现有平面和高程控制点以及测区地形图等,依据项目任务书或合同书以及相关规范的要求在图上进行设计,标绘处计划设站的区域。 1.1选点的基本要求 基本要符合规范(全球定位系统gps测量规范 gb/t18314-20xx)的相关要求: a)测站四周视野开阔,高度角15°以上不允许存在成
片的障碍物 b)远离大功率无线电发射源,以免损坏接收机天线,高压 1/16 电线50米至少,大功率无线发射源至少200米。 c)测站远离房屋、围墙、广告牌、山坡及大面积平静水面(湖泊、池塘)等信号反射物,以免出现严重的多路径效应。 d)点位应位于地质条件良好、点位稳定、易于保护的地方, 并尽可能顾及交通条件。 1.2选点作业 a)测量人员应按照在图上选择的初步位置以及对点位的基本 要求,在实地最终选定点位,并做好相应的标记。 b)利用旧点时,应对旧点的稳定性、可靠性和完好性进行检 查,符合要求时方可利用。 c)点名以该点位所在地命名,无法区分时,可在点名后加注 (一)、(二)。 d)新旧点重合时,应沿用旧点名,一般不应更改。
全球定位系统测量规范
全球定位系统(GPS)测量规范 1 范围 本标准规定利用全球定位系统(GPS)按静态、快速静态定位原理,建立测量控制网(简称(GPS)控制网)的原则、等级划分和作业方法。 本标准适用于国家和局部GPS控制网的设计、布测与数据处理。 2 引用标准 下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。 GB 12897—1991 国家一、二等水准测量规范 GB 12898—1991 国家三、四等水准测量规范 GB/T 17942—2000 国家三角测量规范 CH 1002—1995 测绘产品检查验收规定 CH 1003—1995 测绘产品质量评定标准 CH/T 1004—1999 测绘技术设计规定 CH 8016—1995 全球定位系统(GPS)测量型接收机检定规程 3 术语 3.1 观测时段 observation session 测站上开始接收卫星信号到停止接收,连续观测的时间间隔称为观测时段,简称时段。3.2 同步观测 simultaneous observation 两台或两台以上接收机同时对同一组卫星进行的观测。 3.3 同步观测环 simultaneous observation loop 三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。 3.4 独立观测环 independent observation loop 由非同步观测获得的基线向量构成的闭合环。 3.5 数据剔除率 percentage of datar rejection 同一时段中,删除的观测值个数与获取的观测值总数的比值。 3.6 天线高 antenna beight 观测时接收机天线相位中心至测站中心标志面的高度。 3.7 参考站 Reference station