实验12 超声波传感器测距
12、超声波测距
一、实验目的:
1、掌握超声波测距原理
2、掌握脉冲宽度测距函数pulseIn()
二、实验原理或参考资料:
1、超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射与接
收回波的时间差t,然后求出距离S=Ct/2,C为超声波波速。由于超声波也是一种声波,其声速C与温度有关,图下图。
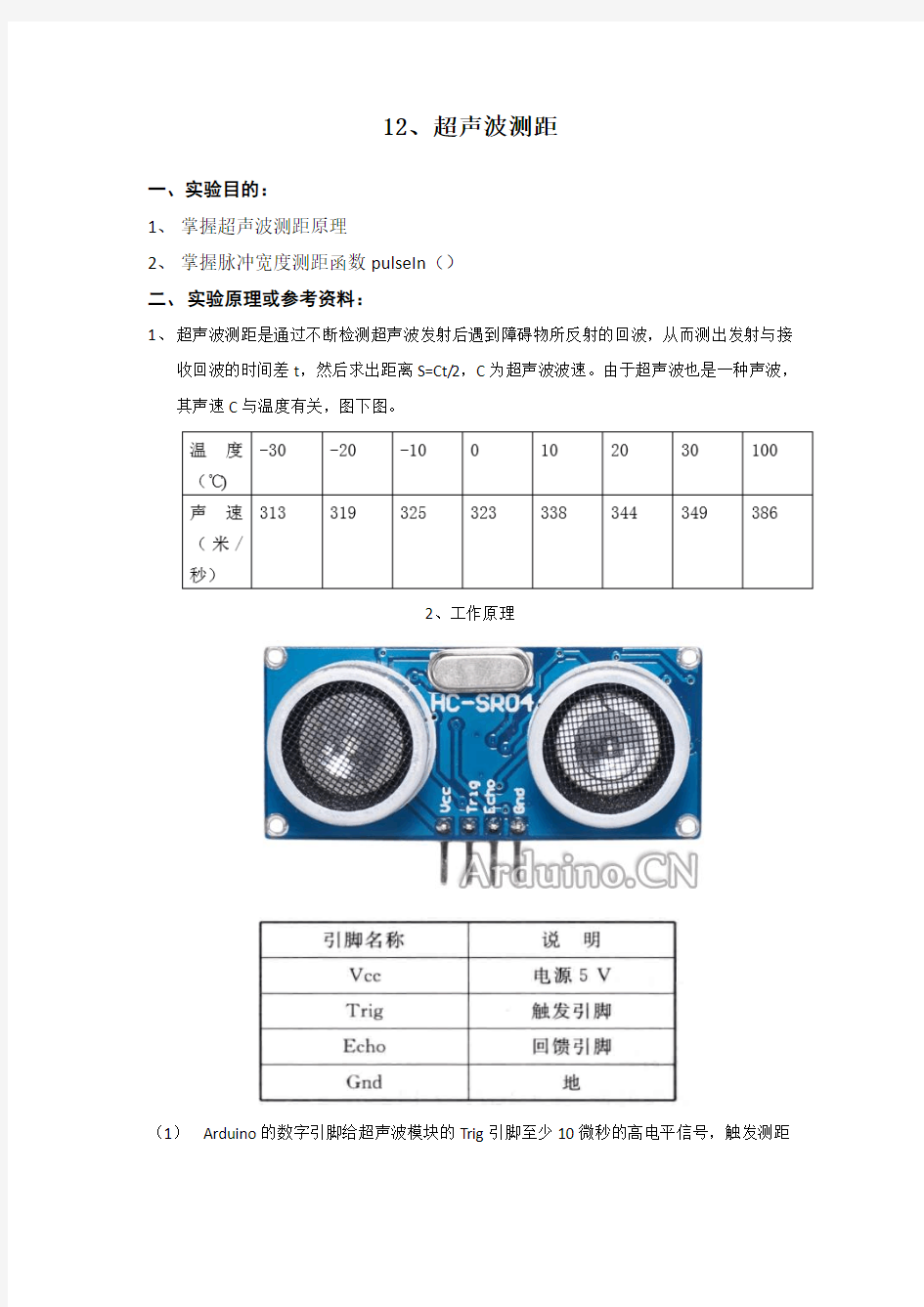
2、工作原理
(1)Arduino的数字引脚给超声波模块的Trig引脚至少10微秒的高电平信号,触发测距
功能
(2)触发测距功能后,模块会自动发送8个40khz的方波脉冲,自动检测是否有信号返回
(3)有信号返回,则Echo引脚会输出高电平,高电平持续的时间就是超声波从发射到返回的时间。测距=(高电平时间x声速)/2
2、脉冲宽度测量函数PulseIn()
功能:检测指定引脚上的脉冲信号宽度。
语法:PulseIn(pin,value)
pin,需要读取脉冲的引脚。Value,需要读取的脉冲类型,HIGH或LOW
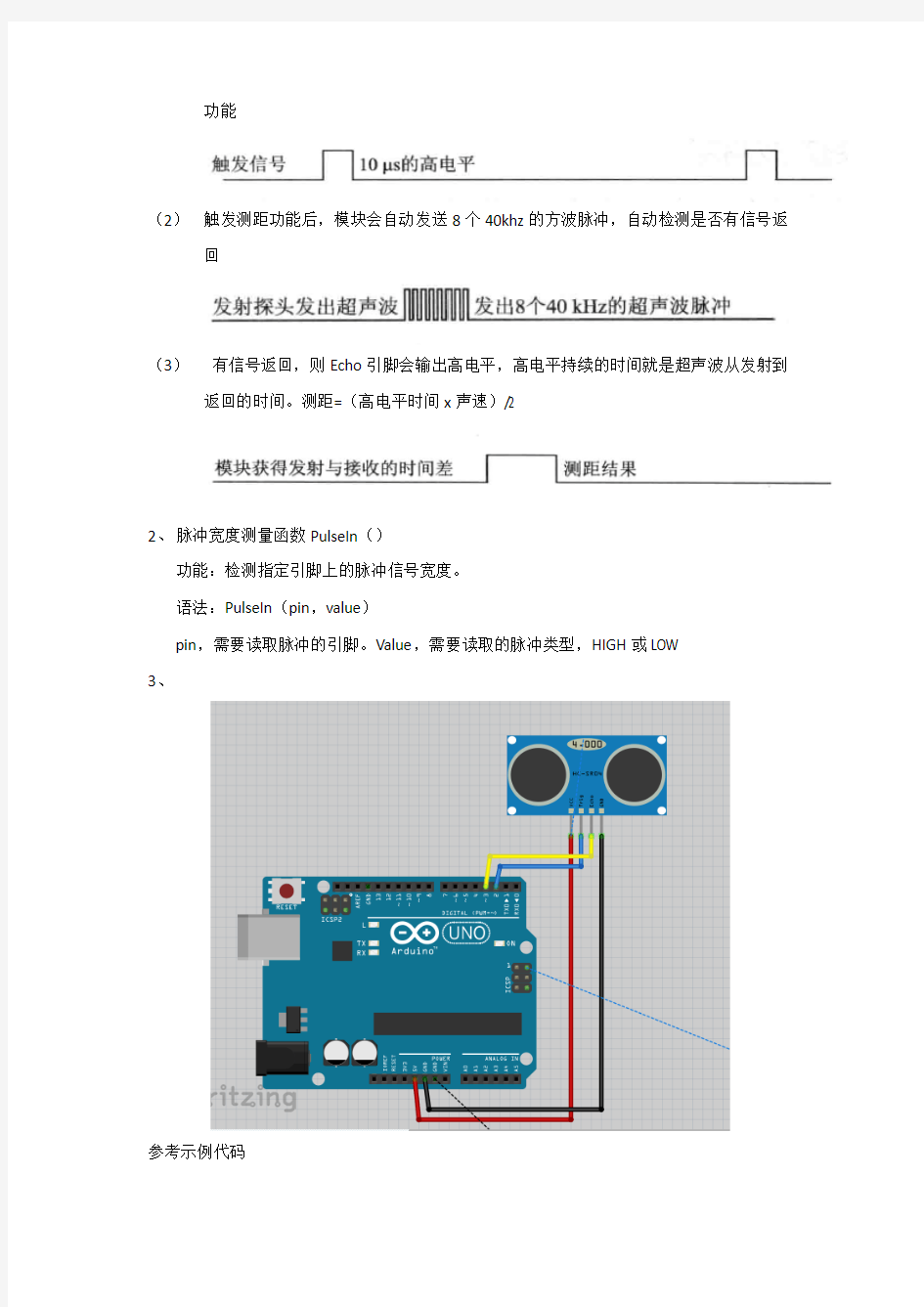
3、
参考示例代码
三、实验结果
基础题:
1、搭建实验电路图,将以上Arduino的超声波测距程序烧录到arduino控制板中,使得能在串口输出传感器数据。在每一行代码后面添加注释,将程序代码及串口输出截图。
提高篇:
1、完成以上基本练习的基础上,试增加一个报警功能(灯光报警),即超过设定的距离阈值即灯光报警。程序代码及串口监视器截图。
超声波传感器测距原理
芀一、超声波测距原理 肅超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的 同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S , 即: 膂S = v·△t /2 ① 芀这就是所谓的时间差测距法。 蝿由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为: 螅V = 331.45 + 0.607T ② 芄 声 速 确 定
后, 只要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。 薂二、系统硬件电路设计 腿图2 超声波测距仪系统框图 蒆基于单片机的超声波测距仪框图如图 2 所示。该系统由单片机定时器产生 40KHZ 的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机 是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单 片机复位,然后控制程序使单片机输出载波为40kHz 的10 个脉冲信号加到超声 波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后, 单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数, 这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路: 莅1 、超声波发射电路 螀超声波发射电路如图3所示,89C51 通过外部引脚P1.0 输出脉冲宽度为250 μ s , 40kHz 的10 个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发 射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远, 可对振荡信号进行功率放大后再加在超声波传感器上。 薈图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应 将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它 上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声 波传感器有专用型和兼用型,专用型就是发送器用作发送超声波,接收器用作接
51单片机超声波测距程序
//晶振:11.0592 //TRIG:P1.2 ECH0:P1.1 //波特率:9600 #include
{ j=10; while(--j); } } } void zd0() interrupt 1 //T0中断用来计数器溢出,超出测距范围{ flag=1; //中断溢出标志 } void StartModule() //T1中断用来扫描数码管和计800ms启动模块{ TX=1; //800MS启动一次模块 _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); TX=0; } void main(void) { TMOD=0x21; //设T0为方式1,GATE=1; SCON=0x50; TH1=0xFD; TL1=0xFD; TH0=0; TL0=0;
基于单片机的超声波测距系统设计实验报告 - 重
指导教师评定成绩: 审定成绩: 自动化学院 计算机控制技术课程设计报告设计题目:基于单片机的超声波测距系统设计 单位(二级学院): 学生姓名: 专业: 班级: 学号: 指导教师: 负责项目: 设计时间:二〇一四年五月 自动化学院制
目录 一、设计题目 (1) 基于51单片机的超声波测距系统设计 (1) 设计要求 (1) 摘要 (2) 二、设计报告正文 (3) 2.1 超声波测距原理 (3) 2.2系统总体方案设计 (4) 2.3主要元件选型及其结构 (5) 2.4硬件实现及单元电路设计 (9) 2.5系统的软件设计 (13) 三、设计总结 (17) 四、参考文献 (17) 五、附录 (18) 附录一:总体电路图 (18) 附录二:系统源代码 (18)
一、设计题目 基于51单片机的超声波测距系统设计 设计要求 1、以51系列单片机为核心,控制超声波测距系统; 2、测量范围为:2cm~4m,测量精度:1cm; 3、通过键盘电路设置报警距离,测出的距离通过显示电路显示出来; 4、当所测距离小于报警距离时,声光报警装置报警加以提示; 5、设计出相应的电子电路和控制软件流程及源代码,并制作实物。
摘要 超声波具有传播距离远、能量耗散少、指向性强等特点,在实际应用中常利用这些特点进行距离测量。超声波测距具有非接触式、测量快速、计算简单、应用性强的特点,在汽车倒车雷达系统、液位测量等方面应用广泛。本次课设利用超声波传播中距离与时间的关系为基本原理,以STC89C52单片机为核心进行控制及数据处理,通过外围电源、显示、键盘、声光报警等电路实现系统供电、测距显示、报警值设置及报警提示的功能。软件部分采用了模块化的设计,由系统主程序及各功能部分的子程序组成。超声波回波信号输入单片机,经单片机综合分析处理后实现其预定功能。 关键词:STC89C52单片机; HC-SR04;超声波测距
基于单片机的超声波测距系统实验报告
基于单片机的超声波测距系统实验报告
一、实验目的 1.了解超声波测距原理; 2.根据超声波测距原理,设计超声波测距器的硬件结构电路; 3.对设计的电路进行分析能够产生超声波,实现超声波的发送与接收,从而实现利用 超声波方法测量物体间的距离; 4.以数字的形式显示所测量的距离; 5.用蜂鸣器和发光二极管实现报警功能。 二、实验容 1.认真研究有关理论知识并大量查阅相关资料,确定系统的总体设计方案,设计出系 统框图; 2.决定各项参数所需要的硬件设施,完成电路的理论分析和电路模型构造。 3.对各单元模块进行调试与验证; 4.对单元模块进行整合,整体调试; 5.完成原理图设计和硬件制作; 6.编写程序和整体调试电路; 7.写出实验报告并交于老师验收。 三、实验原理 超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距S=Ct/2,式中的C为超声波波速。由于超声波也是一种声波,其声速C与温度有关。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。声速确定后,只要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理,单片机(AT89C51)发出短暂的40kHz信号,经放大后通过超声波换能器输出;反射后的超声波经超声波换能器作为系统的输入,锁相环对此信号锁定,产生锁定信号启动单片机中断程序,得出时间t,再由系统软件对其进行计算、判别后,相应的计算结果被送至LED显示电路进行显示。 (一)超声波模块原理: 超声波模块采用现成的HC-SR04超声波模块,该模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm。模块包括超声波发射器、接收器与控制电路。基本工作原理:采用 IO 口 TRIG 触发测距,给至少 10us 的高电平信号;模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。实物如下图1。其中VCC 供5V 电源,GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四支线。
超声波测距程序(详细C语言数码管显示)
超声波测距程序(详细C语言数码管显示) #include
超声波测距仪硬件电路的设计
超声波测距仪电路设计实验报告 轮机系楼宇071 周钰泉2007212117 实验目的:了解超声波测距仪的原理,掌握焊接方法,掌握电路串接方法,熟悉电路元件。 实验设备及器材:电烙铁,锡线,电路元件 实验步骤:1,学习keil软件编写程序2、焊接电路板3、运行调试 超声波测距程序: #include
unsigned char i; sbit ST=P3^0; sbit OE=P3^1; sbit EOC=P3^4; sbit CLK=P3^5; sbit M1=P3^6; sbit M2=P3^7; sbit SPK=P2^6; sbit LA=P3^3; sbit LB=P3^2; sbit LC=P2^7; sbit K1=P2^4; sbit K2=P2^5; bit wd; bit yw; bit shuid; bit shuig; unsigned int cnta; unsigned int cntb; bit alarmflag; void delay10ms(void) { unsigned char i,j; for(i=20;i>0;i--) for(j=248;j>0;j--); } void main(void) { M1=0; M2=0; yw=1; wd=0; SPK=0; ST=0; OE=0; TMOD=0x12; TH0=0x216; TL0=0x216; TH1=(65536-500)/256; TL1=(65536-500)%256; TR1=1; TR0=1; ET0=1; ET1=1; EA=1; ST=1; ST=0; while(1) { if(K1==0) { delay10ms(); if(K1==0) { yw=1; wd=0; } } else if(K2==0) { delay10ms(); if(K2==0) { wd=1; yw=0; } } else if(LC==1) { delay10ms(); if(LC==1) { M1=0; M2=1; temp1=13; shuid=0; shuig=1; LB=0; } } else if((LC==0) && (LB==1)) { delay10ms(); if((LC==0) && (LB==1)) { M1=0; M2=0; temp1=12; shuig=0; shuid=0; LB=0; }
超声波传感器及其测距原理
安全避障是移动机器人研究的一个基本问题。障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。本超声波测距系统选用了SensComp公司生产的Polaroid 6500系列超声波距离模块和600系列传感器,微处理器采用了ATMEL公司的AT89C51。本文对此超声波测距系统进行了详细的分析与介绍。 1、超声波传感器及其测距原理 超声波是指频率高于20KHz的机械波[1]。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应[1]的原理将电能和超声波相互转 化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。 超声波测距的原理一般采用渡越时间法TOF(time of flight)[2]。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的
声源与障碍物之间的距离,即 1、硬件电路设计 我们设计的超声波测距系统由Polaroid 600系列传感器、Polaroid 6500系列超声波距离模块和AT89C51单片机构成。 2.1 Polaroid 600系列传感器 此超声波传感器是集发送与接收一体的一种传感器。传感器里面有一个圆形的薄片,薄片的材料是塑料,在其正面涂了一层金属薄膜,在其背面有一个铝制的后板。薄片和后板构成了一个电容器,当给薄片加上频率为49.4kHz、电压为300VAC pk-pk的方波电压时,薄片以同样的频率震动,从而产生频率为49.4kHz的超声波。当接收回波时,Polaroid 6500内有一个调谐电路,使得只有频率接近49.4kHz的信号才能被接收,而其它频率的信号则被过滤。 Polaroid 600超声传感器发送的超声波具有角度为30度的波束角[3],如图1所示:
单片机应用_超声波测距器
单片机课程设计 一、需求分析: 超声波测距器,可以应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。要求测量围在1m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。 本文旨在设计一种能对中近距离障碍物进行实时测量的测距装置,它能对障碍物进行适时、适量的测量,起到智能操作,实时监控的作用。 关键词单片机AT82S51 超声波传感器测量距离 二、硬件设计方案 设计思路 超声波传感器及其测距原理 超声波是指频率高于20KHz的机械波。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time of flight)。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离 测量距离的方法有很多种,短距离的可以用尺,远距离的有激光测距等,超声波测距适用于高精度的中长距离测量。因为超声波在标准空气中的传播速度为340米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以达到毫米级。 由于超声波指向性强,能量消耗缓慢,在介质中传播距离远,因而超声波可以用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,并且在测量精度方面也能达到要求。 超声波发生器可以分为两类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。本课题属于近距离测量,可以采用常用的压电式超声波换能器来实现。 根据设计要求并综合各方面因素,可以采用AT89S51单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距器的系统框图如下图所示: 超声波测距器系统设计框图 主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。采用AT89S51来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
PLC超声波测距实验报告082039140程稳
利用plc的高速计数模块进行超声波测距实验 ―――――微型控制计算机暑期设计实验报告 082039140程稳 利用51单片机来驱动超声波模块测距,是一件很容易的事,只需要结合定时中断和外部中断,利用12M或更高的晶振频率即可精确获取从发射到接收到超声波之间的时间,平均1ms对应 3.4cm的行程,本GE比赛设计需要物位测量的最大距离是30cm,即需要30*2/3.4=17.64ms,而GE PAC RX3i的PME软件梯形图程序得扫描周期2ms以上,就算是最快的定时节点也有1ms,所以若直接用PLC的普通离散量输入模块IC694MDL654输入节点来测量接收到超声波回波的时间的误差为1ms,误差距离3.4/2=1.7cm,结果自然不理想,更严重的问题在于PLC该模块无硬件中断响应功能,是不能测电平宽度的。总之PLC的IO口工作在低速模式下是难以胜任高速测量任务的,但可喜的是GE PLC 的高速计数模块HSC304能处理2MHZ的信号,但仍无硬件中断功能。于是想能否干脆把单片机测出的电平时间数据通过串口发送给PLC,我也试着这样连线测试,不过PLC串口的使用不像单片机这么简单,没有相关资料,PLC内部寄存器找不到PLC从单片机接收的数据。于是仍决定放弃此方案,回到高速计数模块。再认真阅读此模块配置信息和实验调试后,发现其可以测量出外部信号频率,于是想既然PLC无法直接测电平宽度,那干嘛不测量频率,有了频率自然有周期,有周期自然有电平宽度!
利用plc的高速计数模块检测超声波测距仪的信号接收端的频率,正常情况下应使用频率直接求得周期接而来计算时间,但由于实际测得这样根本很难实现,所以直接测频率,并利用示波器查看该频率的波形,并修改程序使得在所测距离变化的情况下,一周期内的低电平保持不变(高电平所持续的时间表示超声波从发出到接收到所经历的时间,低电平是延时,为了使得波形正常),然后测出频率及其所对应的距离。 以下是用虚拟示波器测出的超声波模块在不同距离测量回波接收脚电压波形:
超声波传感器测距仪设计报告(全)-张哲铭
单片机、传感器、印制电路板 课程整合实训 电子产品设计与制作 技术报告 (2013——2014 学年第二学期) 项目名称:超声波测距仪设计 指导教师:卢建声,曾庆波,代瑶 专业:微电子技术 班级:12微电子 组长:张哲铭 组员:高金阁,李雨泽,苏程龙黑龙江信息技术职业学院·电子工程系
目录 任务书...................................................................... 错误!未定义书签。 一、工作任务 ................................................................. 错误!未定义书签。 二、工作目标 (3) 三、主要设计内容 (3) 1.原理设计 (3) 2.原理框图 (3) 3原理图 (4) 4元件清单 (4) 五、提交成果 ................................................................. 错误!未定义书签。 一、原理设计与技术路线 .............................................. 错误!未定义书签。 1、原理图绘制......................................................... 错误!未定义书签。 2、PCB图绘制.......................................................... 错误!未定义书签。 3、单元电路设计..................................................... 错误!未定义书签。 4、整机设计 ............................................................ 错误!未定义书签。 (5) (6) 六、总结报告 (10) 附录 (13) 超声波测距仪设计
超声波测距仪的设计说明
题目:超声波测距仪的设计 超声波测距仪的设计 一、设计目的: 以51单片机为主控制器,利用超声波模块HC-SR04,设计出一套可在数码管上实时显示障碍物距离的超声波测距仪。 通过该设计的制作,更为深入的了解51的工作原理,特别是51的中断系统及定时器/计数器的应用;掌握数码管动态扫描显示的方法和超声波传感器测距的原理及方法,学会搭建51的最小系统及一些简单外围电路(LED显示电路)。从中提高电路的实际设计、焊接、检错、排错能力,并学会仿真及软件调试的基本方法。 二、设计要求: 设计一个超声波测距仪。要求: 1.能在数码管上实时显示障碍物的实际距离; 2.所测距离大于2cm小于300cm,精度2mm。 三、设计器材: STC89C52RC单片机 HC-SR04超声波模块 SM410561D3B四位的共阳数码管 9014三极管(4) 按键(1) 电容(30PF2,10UF1) 排阻(10K),万用板,电烙铁,万用表,5V直流稳压电源,镊子,钳子,
导线及焊锡若干,电阻(200欧5)。 四、设计原理及设计方案: (一)超声波测距原理 超声测距仪是根据超声波遇到障碍物反射回来的特性进行测量的。超声波发射器向某一方向发射超声波,在发射同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即中断停止计时。通过不断检测产生波发射后遇到障碍物所反射的回波,从而测出发射超声波和接收到回波的时间差T,然后求出距离L。基本的测距公式为:L=(△t/2)*C 式中 L——要测的距离 T——发射波和反射波之间的时间间隔 C——超声波在空气中的声速,常温下取为344m/s 声速确定后,只要测出超声波往返的时间,即可求得L。 根据本次设计所要求的测量距离的围及测量精度,我们选用的是HC-SR04超声波测距模块。(如下图所示)。此模块已将发射电路和接收电路集成好了,硬件上不必再自行设计繁复的发射及接收电路,软件上也无需再通过定时器产生40Khz的方波引起压电陶瓷共振从而产生超声波。在使用时,只要在控制端‘Trig’发一个大于15us宽度的高电平,就可以在接收端‘Echo’等待高电平输出。单片机一旦检测到有输出就打开定时器开始计时。 当此口变为低电平时就停止计时并读出定时器的值,此值就为此次测距的时间,再根据传播速度方可算出障碍物的距离。 (二)超声波测距模块HC-SR04简要介绍 HC-SR04超声波测距模块的主要技术参数使用方法如下所述: 1. 主要技术参数: ①使用电压:DC5V ②静态电流:小于2mA ③电平输出:高5V
超声波测距
总体方案 本设计主要是进行距离的测量和报警,设计中涉及到的内容较多,主要是将单片机控制模块、超声波测距模块、蜂鸣器报警模块、4位数码管显示模块这几个模块结合起来。而本设计的核心是超声波测距模块,其他相关模块都是在测距的基础上拓展起来的,测距模块是利用超声波传感器,之后选择合适单片机芯片,以下就是从相关方面来论述的。 超声波测距仪 超声波是一种超出人类听觉极限的声波即其振动频率高于20 kHz的机械波。超声波传感器在工作的时候就是将电压和超声波之间的互相转换,当超声波传感器发射超声波时,发射超声波的探头将电压转化的超声波发射出去,当接收超声波时,超声波接收探头将超声波转化的电压回送到单片机控制芯片。超声波具有振动频率高、波长短、绕射现象小而且方向性好还能够为反射线定向传播等优点,而且超声波传感器的能量消耗缓慢有利于测距。在中、长距离测量时,超声波传感器的精度和方向性都要大大优于红外线传感器,但价格也稍贵。从安全性,成本、方向性等方面综合考虑,超声波传感器更适合设计要求。 综合上述三种测距仪的对比,本实验选着超声波测距仪。 系统方案 本系统选择52单片机作为控制系统核心,所测得的距离数值由4位共阴极数码管显示,与障碍物之间的不同距离利用蜂鸣器频率的不同报警声提示,超声波发射信号由52单片机的P1.0口送出到超声波发射电路,将超声波发送出去,报警系统由蜂鸣器电路构成。本设计中将收发超声波的探头分离这样不会使收发信号混叠,从而能避免干扰,可以很好的提高系统的可靠性。系统框图如下:
硬件设计 超声波测距模块 模块功能 该模块利用超声波测距仪,测试小车与障碍物之间的距离,当距离小于某一给定值时,利用程序,将信号传递给单片机的某个引脚。其他控制模块检测该引脚的电平高低,根据电平的高低,控制小车的行驶状态。 基本实现原理 超声波接收器 放大器 检波电路 显示模块 51单片机 放大电路 报警模块 超声波接收器
超声波测距实验报告
电子信息系统综合设计报告 超声波测距仪
目录 摘要 (3) 第一章绪论 (3) 1.1 设计要求 (3) 1.2 理论基础 (3) 1.3 系统概述 (4) 第二章方案论证 (4) 2.1 系统控制模块 (5) 2.2距离测量模块 (5) 2.3 温度测量模块 (5) 2.4 实时显示模块 (5) 2.5 蜂鸣报警模块 (6) 第三章硬件电路设计 (6) 3.1 超声波收发电路 (6) 3.2 温度测量电路 (7) 3.3 显示电路 (8) 3.4 蜂鸣器报警电路 (9) 第四章软件设计 (10) 第五章调试过程中遇到的问题及解决 (11) 5.1 画PCB及制作 (11) 5.2 焊接问题及解决 (11) 5.3 软件调试 (11) 实验总结 (13) 附件 (14) 元器件清单 (14) HC-SR04超声波测距模块说明书 (15) 电路原理图 (17) PCB图 (17) 程序 (18)
摘要 该系统是一个以单片机技术为核心,实现实时测量并显示距离的超声波测距系统。系统主要由超声波收发模块、温度补偿电路、LED显示电路、CPU处理电路、蜂鸣器报警电路等5部分组成。系统测量距离的原理是先通过单片机发出40KHz 方波串,然后检测超声波接收端是否接收到遇到障碍物反射的回波,同时测温装置检测环境温度。单片机利用收到回波所用的时间和温度补偿得到的声速计算出距离,显示当前距离与温度,按照不同阈值进行蜂鸣报警。由于超声波检测具有迅速、方便、计算简单、易于做到实时控制的特点,并且在测量精度方面能达到工业实用的要求,因此在生产生活中得到广泛的应用,例如超声波探伤、液位测量、汽车倒车雷达等。 关键词:超声波测距温度测量单片机 LED数码管显示蜂鸣报警 第一章绪论 1.1设计要求 设计一个超声波测距仪,实现以下功能: (1)测量距离要求不低于2米; (2)测量精度±1cm; (3)超限蜂鸣器或语音报警。 1.2理论基础 一、超声波传感器基础知识 超声波传感器是利用晶体的压电效应和电致伸缩效应,将机械能与电能相互转换,并利用波的特性,实现对各种参量的测量。 超声波的传播速度与介质的密度和弹性特性有关,与环境条件也有关: 在气体中,超声波的传播速度与气体种类、压力及温度有关,在空气中传播速度为C=331.5+0.607t/0C (m/s) 式中,t为环境温度,单位为0C. 二、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 三、超声波测距原理 由于超声波指向性强,能量消耗缓慢,在空气中传播的距离较远,因而超声波
超声波测距C语言源程序代码
超声波测距C语言源程 序代码 文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]
/*{HZ即单位s的倒数}本晶振为12MHZ,因此外部的时钟频率为12MHZ,所以内部的时钟频率为(12M H Z)/12=1M H 即1000000HZ,而机械频率为1/(1MHZ),即每完成一次计算(即定时器的值加一)用时, 即1us(微秒).*/ /*************************************************************************** ********/ #include<> #define UC unsigned char #define UI unsigned int void delay(UI); sbit BX = P3^0;void TimeConfiguration(); a = 0; b = 0; c = 0; P2 =~ 0x00; goto loop; } time = TL0 + TH0*256; juli = ( int )( (time*/2 ); BAI = ( (juli%1000)/100 ); SHI = ( (juli%100)/10 ); GE = ( juli%10 ); /******************************************两种模式的距离显示 ********************************************/ if(juli > MAX) { Hong = 0; Lv = 1; while( t1-- ) { a = 0; b = 1; c = 1; P2 =~ CharacterCode[BAI]; delay(400); a = 1; b = 0; c = 1; P2 =~ CharacterCode[SHI]; delay(400); a = 1; b = 1; c = 0; P2 =~ CharacterCode[GE]; delay(390);
stm32超声波测距汇总
嵌入式系统及应用开放性实验报告 Stm32 HC-SR04超声波测距
第一章绪论 1.1STM32超声波测距系统 1.1.1 HC-SR04超声波测距模块简介 HC-SR04 超声波测距模块可提供2cm-400cm 的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。 使用电压:DC---5V 静态电流:小于2mA 电平输出:高5V 低0V 感应角度:不大于15度 探测距离:2cm-450cm 高精度:可达3mm 1.1.2 HC-SR04超声波测距模块原理 采用IO 口TRIG 触发测距,给TRIG至少10us 的高电平信号; 模块自动发送8个40khz 的方波,自动检测是否有信号返回; 有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超 声波从发射到返回的时间。 测试距离=(高电平时间*声速(340M/S))/2; T(℃)={(V25-Vsense)/Avg_Slope}+25 V25=Vsense 在25 度时的数值(典型值为: 1.43)。 Avg_Slope=温度与Vsense 曲线的平均斜率(单位为mv/℃或uv/℃)(典型值为4.3Mv/℃)。 利用以上公式,我们就可以方便的计算出当前物体超声波模块之间的距离。 程序中使用: 测试距离=高电平时间*声速(340M/S))/2 这个公式 1.2 设计要求 使用ARM开发板上硬件资源与超声波模块结合,编程实现实时距离显示功能,通过数码管实时显示距离,并在距离小于设定报警距离时使用蜂鸣器报警。1.3 总体设计方案及框图
1.3.1 距离测量及获取方法 通过设置定时器,开启中断,读取ECHO 输出高电平的持续时间,计算结果 作为当前距离。1.3.2 总体设计方案 实时距离: 本超声波测距系统可实现对距离的实时测量,并不断显示在数码 管上 保持距离: 用户可通过按键使得当前距离值在数码管保持, 也可再次返回对 距离的实时测量,此模式下距离小于报警值不会报警,仅为显示模式。 两种模式相互转换,并且可以在距离保持状态时通过按键进入修改报警距离模式,如果实测距离小于下限值,蜂鸣器报警,当距离大于下限值时,报警自动停止。 1.3.3 程序框图 K5 按下 K6按下 否 是 K7按下 是 否 否 超声波测距数码管显示距离K4是否按下 显示当前距离K7是否按下 开始初始化 数码管及按键扫描 SV++ SV-- K1是否按下
超声波测距实验报告
目录 1、课题设计的目的和意义 (3) 2、课题要求 (3) 2.1、基本功能要求 (3) 2.2、提高要求 (4) 3、重要器件功能介绍 (4) 3.1、CX20106A红外线发射接收专用芯片 (4) 3.2、AT89C51系列单片机的功能特点 (5) 3.3、ISD1700优质语音录放电路 (6) 4、超声波测距原理 (8) 4.1、超声波测距原理图 (8) 4.2、超声波测距的基本原理 (9) 5、硬件系统设计 (10) 5.1、超声波发射单元 (10) 5.2、超声波接收单元 (11)
5.3、显示单元 (11) 5.4、语音单元 (12) 5.5、硬件设计中遇到的难题: (12) 6、系统软件设计 (14) 7、调试与分析 (15) 7.1调试 (15) 7.2误差分析 (15) 8、总结 (16) 9、附件 (17) 9.1、总电路 (17) 9.2、主要程序 (18) 10、参考文献 (22)
1课题设计的目的及意义 随着科学技术的快速发展,超声波在测距仪中的应用越来越广,但就目前技术水平而言,人们可以利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。展望未来,超声波测距作为一种新型的非常重要有用的工具在各方面都有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求。如声纳的发展趋势:研究具体的高定位精度的被动测距声纳,以满足军事和渔业等的发展需求,实现远程的被动探测和识别。毋庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。 超声波测距在某些场合有着显著的优点,因为这种方法是利用计算超声波在被测物体和超声波探头之间的传输来测量距离的,因此它是一种非接触式的测量,所以他就能够在某些场合或环境比较恶劣的环境下使用。比如测有毒或者有腐蚀性化学物质的液面高度或者高速公路上快速行驶汽车之间的距离。 随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最注重发展到具有创造力。在新的时代,测距仪将发挥更大的作用。 2课题要求 以单片机AT89C51为中心控制单元,配以超声波发射、接收装置,实现超声波发射及接收其遇到障碍物发生反射形成的回波信号,并根据超声波在介质中的传播速度及超声波从发射到接收到回波的时间,计算出发射点距障碍物的距离,设计出一套基于单片机的脉冲反射式超声波测距系统,利用单片机进行操作控制,用数码管作输出显示,设计发射、接收、检测、显示硬件电路和测距系统软件。
用51单片机实现HC-SR04超声波测距程序
#include
基于单片机的超声波测距仪设计
基于单片机的超声波测距仪设计
基于单片机的超声波测距仪设计 1总体设计方案介绍 1.1超声波测距原理 发射器发出的超声波以速度υ在空气中传播,在到达被测物体时被反射返回,由接收器接收,其往返时间为t,由s=vt/2即可算出被测物体的距离。由于超声波也是一种声波,其声速v 与温度有关,下表列出了几种不同温度下的声速。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。 表1-1 超声波波速与温度的关系表 表1-1 1.2超声波测距仪原理框图如下图 单片机发出40kHZ的信号,经放大后通过超声波发射器输出;超声波接收器将接收到的超声波信号经放大器放大,用锁相环电路进行检波处理后,启动单片机中断程序,测得时间为t,再由软件进行判别、计算,得出距离数并送LED
显示。 图1-1 超声波测距仪原理框图 2 系统的硬件结构设计 硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分。单片机采用AT89C51或其兼容系列。采用12MHz高精度的晶振,以获得较稳定时钟频率,减小测量误差。单片机用P1.0端口输出超声波换能器所需的40kHz的方波信号,利用外中断0口监测超声波接收电路输出的返回信号。显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管8550驱动。 2.1 51系列单片机的功能特点及测距原理 2.1.1 51系列单片机的功能特点 5l系列单片机中典型芯片(AT89C51)采用40引脚双列直插封装(DIP)形式,内部由CPU,4kB的ROM,256 B的RAM,2个16b的定时/计数器TO和T1,4个8 b的工/O端I:IP0,
超声波传感器测量距离
一、超声波测距原理 超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即: S = v·△t /2 ① 这就是所谓的时间差测距法。 由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为: V = 331.45 + 0.607T ② 声 速 确 定 后, 只 要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。 二、系统硬件电路设计
图2 超声波测距仪系统框图 基于单片机的超声波测距仪框图如图2所示。该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路: 1 、超声波发射电路 超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远,可对振荡信号进行功率放大后再加在超声波传感器上。 图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声