系统建模与仿真仿真作业结果
Simulink 仿真
根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初
步得到图3动态结构图
图3
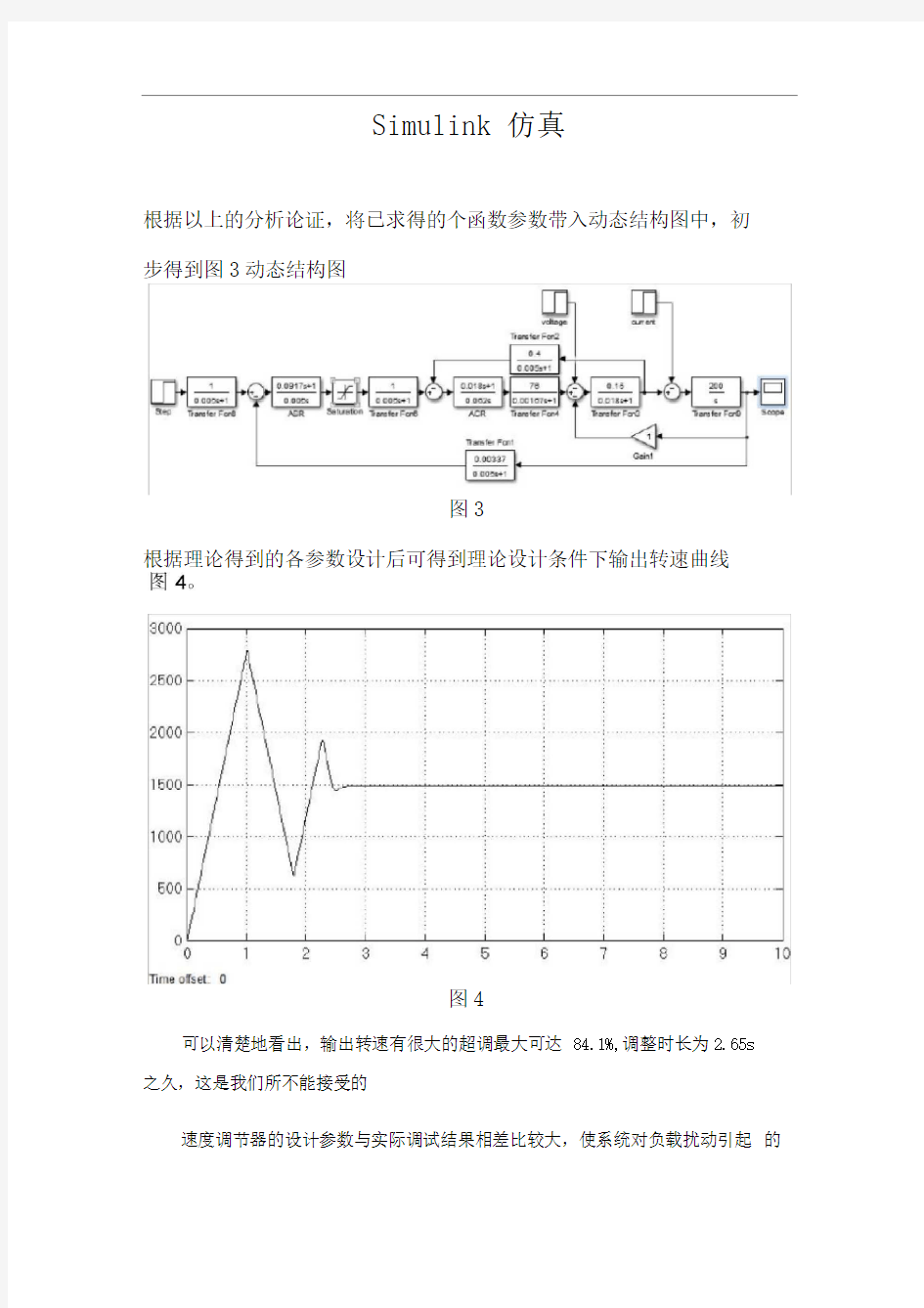
根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线
图4
可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的
速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的
动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。
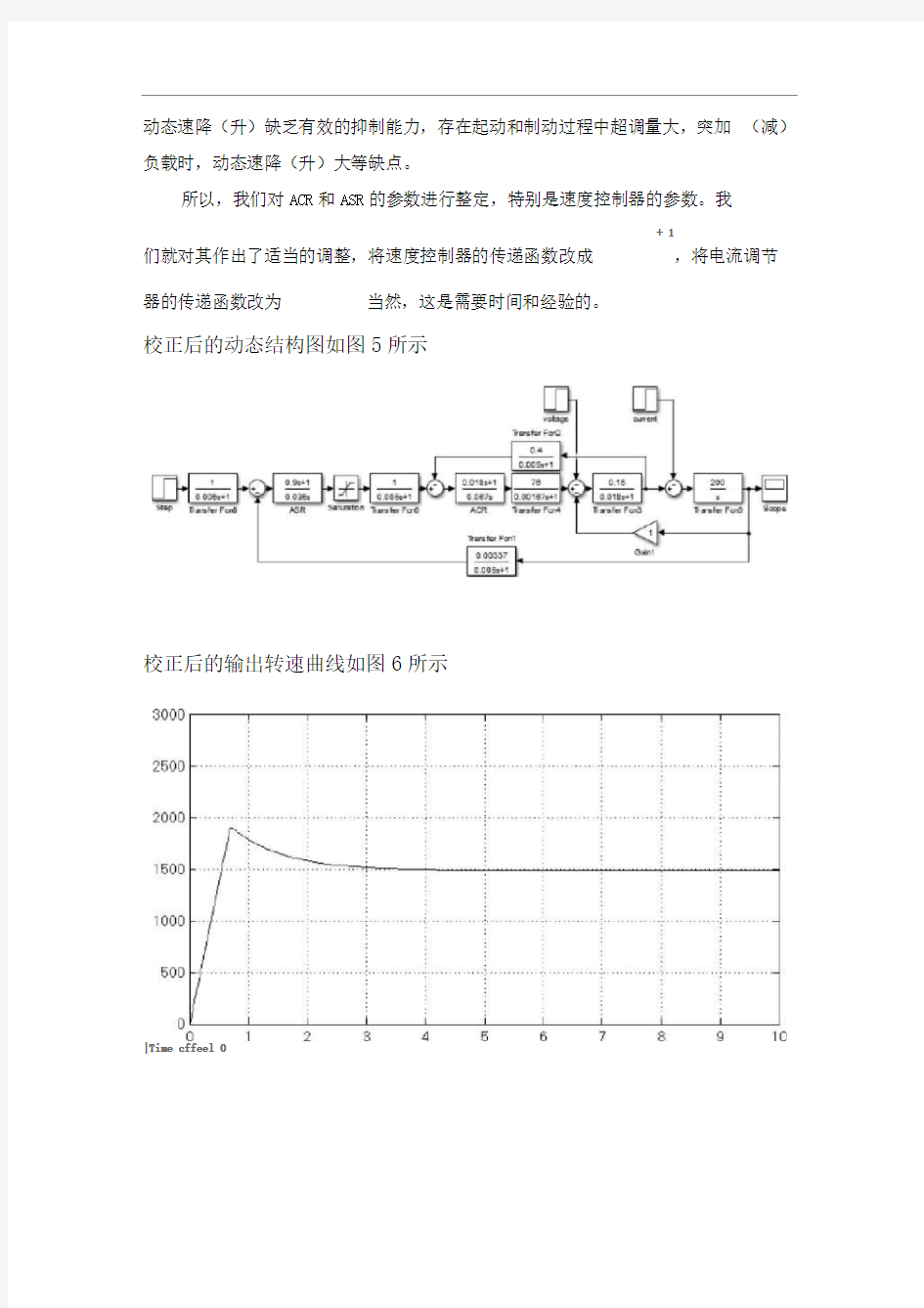
所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。我
+ 1
们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为当然,这是需要时间和经验的。
校正后的动态结构图如图5所示
校正后的输出转速曲线如图6所示
|Time cffeel 0
图六
电流环跟随性能仿真实验
如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。这就需要我们对电流环的跟随性能加以分析。将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。电流环模型如图7所示:
Transfer Fcn1
图7
通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响
应。
[nu m,de n]=li nm od('curre nt_loop')
sys=tf( nu m,de n)
figure(1)
margi n(sys)
[mag,phase,w]=bode(sys);
[gm,pm,wcg,wcp]=margi n( mag,phase,w)
Figure(2)
Nyquist(sys)
Figure?)
Step(sys)
我们还可以得到以下的数据
gm = 4.2925 pm =47.7281 wcg = 345.3056
cp = 164.6317
剪切频率3 c=164.6317rad/s;相角相对裕度S = 47.7281 °; -n穿越频率3
g=345.3056rad/s 幅值相对裕度Lh=20lg (4.2925) =12.65dB
27t 0
1 上
2 」 J A 10 10 10 10 10 F 怛OuerKV HQd^k 图8电流环的bode 图
图10电流环的单位阶跃响应
⑥
s co?3 ■
….
呂畫rl u 丄图9电流环的nyquist 图
0D O H Di 心4甬m
Gm - 12 7d0 欄 ratfs) Rm _ 47 5 de 。-it 10& rnd^k
D 01 QQ2 0 03 0.04 DOS Q 06 0.07 0 DA ilime (Mjconds)
mprr-三
1<
从图8与9种可以看出我们设计的电流环控制器是正确的,电流环是稳定的,根据剪切频率就可以看出电流的响应很快,即跟随性很好。从图10中可以更直接的看到这一点。在图20中还可以看出电流环的超调量很小(3.6%)与过渡过程时间很短(0.07s)。
转速环抗扰性能仿真
图12图13图14分别为ASR的输出与电动机转速动态特性仿真结果,ACR的输出与电动机转速动态特性仿真结果以及电动机电流与电动机转速动态特性仿真结果。
图14电动机电流特性
(2)仿真结果分析
由图12、13、14可见,系统地工作过程可概括为如下几点:
(1)ASR从起动到稳速运行的过程中经历了两个状态,即饱和限幅输出与线性调节状态;
(2)ACR从起动到稳速运行的过程中制工作在一种状态,即线性调节状态;
(3)该系统对于起动特性来说,已达到预期目的;
4)对于系统性能指标来说,起动过程中电流的超调量为 5.3%,转速的超调量为21.3%。这与理论最佳设计有一定差距,尤其是转速超调量略高一些。
抗扰性能分析
实验中我们选取Start time=O.O,Stop time=5.0,仿真时间从Os到5.0&扰动加入的时间均为3.5s。
一般情况下,双闭环调速系统的干扰主要是负载突变与电网电压波动两种。
图15、绘出了该系统电动机转速在突加负载(4 I=12A)情况下电动机电流Id与输出转速n的关系;图16、17分别绘出了电网电压突减(△ U=100V)情况下晶闸管触发整流装置输出电压Ud0、电动机两端电压Ud,与输出转速n的关系。
图15突加负载抗扰特性
通过仿真分析,对于该系统的抗扰性能,我们可有如下几个结论:
(1)系统对负载的大幅度突变具有良好的抗扰能力,在厶I=12A的情况下系统恢复时间为tf=1.2s。
(2)系统对电网电压的大幅波动也同样具有良好的抗扰能力。在厶U=100V的情
况下,系统恢复时间为tf=0.15s。
(3)与理想的电动机的起动特性相比较,该系统的起动和恢复时间显得略长一些(轻载状态下接近4s)。
实验总结
本次建模仿真实验,按我的理解是一个多学科交叉的综合性实验,在整个实验过程中,激起了我对电机学,运动控制理论的理论回忆,对于双闭环系统有了更加深刻的了解。从数学建模开始从原理进行剖析学习,当然本次实验的中心思
想还是对于仿真实验的训练,Simulink 的仿真练习,对各模块的仿真有了更多的了解。系统性的进行了仿真练习加深了我对仿真模型的认识与理解。我们小组在实验初期在寻找突破口的地方发生了歧义,最后在运动控制系统的第二章和第三章中找到了灵感,利用MATLAB上的SIMULINK仿真平台对直流调速系统进行理论设计与调试,使得系统的性能分析过程简单且直观。通过对系统进行仿真,可以准确地了解到理论设计与实际系统之间的偏差,逐步改进系统结构及参数,得到最优调节器参数,使得系统的调试得到简化,缩短了产品的开发设计周期。
在对于PID控制方面的有了进一步的学习与认识。在这方面老师的帮助起到了十分重要的作用。测偏纠偏的过程是本次实验的重点也是难点,每个系统的ASR 转速调节器的传递函数都有所不同因此对于这里的测偏纠偏过程就变成的一种经验的积累,在一个围寻找最适合自己系统的传递函数显得尤为重要。
参考文献
[1] 阮毅,伯时.电力拖动自动控制系统:运动控制系统[M]. :机械工业,2009:
[2] 恩让,聂诗良.控制系统仿真[M]. :中国林业;大学,2006:
信号与系统仿真实验报告
信号与系统仿真实验报告1.实验目的 了解MATLAB的基本使用方法和编程技术,以及Simulink平台的建模与动态仿真方法,进一步加深对课程内容的理解。 2.实验项目 信号的分解与合成,观察Gibbs现象。 信号与系统的时域分析,即卷积分、卷积和的运算与仿真。 信号的频谱分析,观察信号的频谱波形。 系统函数的形式转换。 用Simulink平台对系统进行建模和动态仿真。 3.实验内容及结果 3.1以周期为T,脉冲宽度为2T1的周期性矩形脉冲为例研究Gibbs现象。 已知周期方波信号的相关参数为:x(t)=∑ak*exp(jkω),ω=2*π/T,a0=2*T1/T,ak=sin(kωT1)/kπ。画出x(t)的波形图(分别取m=1,3,7,19,79,T=4T1),观察Gibbs现象。 m=1; T1=4; T=4*T1;k=-m:m; w0=2*pi/T; a0=2*T1/T; ak=sin(k*w0*T1)./(k*pi); ak(m+1)=a0; t=0:0.1:40; x=ak*exp(j*k'*w0*t); plot(t,real(x)); 3.2求卷积并画图 (1)已知:x1(t)=u(t-1)-u(t-2), x2(t)=u(t-2)-u(t-3)求:y(t)=x1(t)*x2(t)并画出其波形。 t1=1:0.01:2; f1=ones(size(t1)); f1(1)=0; f1(101)=0; t2=2:0.01:3; f2=ones(size(t2)); f2(1)=0; f2(101)=0; c=conv(f1,f2)/100;
t3=3:0.01:5; subplot(311); plot(t1,f1);axis([0 6 0 2]); subplot(312); plot(t2,f2);axis([0 6 0 2]); subplot(313); plot(t3,c);axis([0 6 0 2]); (2)已知某离散系统的输入和冲击响应分别为:x[n]=[1,4,3,5,1,2,3,5], h[n]=[4,2,4,0,4,2].求系 统的零状态响应,并绘制系统的响应图。 x=[1 4 3 5 1 2 3 5]; nx=-4:3; h=[4 2 4 0 4 2]; nh=-3:2; y=conv(x,h); ny1=nx(1)+nh(1); ny2=nx(length(nx))+nh(length(nh)); ny=[ny1:ny2]; subplot(311); stem(nx,x); axis([-5 4 0 6]); ylabel('输入') subplot(312); stem(nh,h); axis([-4 3 0 5]); ylabel('冲击效应') subplot(313); stem(ny,y); axis([-9 7 0 70]); ylabel('输出'); xlabel('n'); 3.3 求频谱并画图 (1) 门函数脉冲信号x1(t)=u(t+0.5)-u(t-0.5) N=128;T=1; t=linspace(-T,T,N); x=(t>=-0.5)-(t>=0.5); dt=t(2)-t(1); f=1/dt; X=fft(x); F=X(1:N/2+1); f=f*(0:N/2)/N; plot(f,F)
工业电力系统动态建模和仿真分析
工业电力系统动态建模和仿真分析 (Industrial power system dynamic modeling and simulation analysis) 一、概述 工业电力系统: 大型电力系统复杂性:本身有发电机、电动机 中型工业电力系统:即使无发电机,也包括大量中压电动机 意义、内容: 1、确定通过动态建模与仿真分析验证: 1、机组的暂态稳定(极限切除时间) 2、特定的大容量电动机的电压稳定 3、校验电流电压型保护的定植 4、确定低频减载与孤网运行 二、介绍原件与组成: (一)、同步电机实用模型: 1、意义:对于dq0坐标下同步电机方程,如果单独考虑与定子d绕组、q绕组相独立的零轴绕组,则在计及d,q,f,D,Q5个绕组的电磁过渡过程(以绕组磁链或电流为状态量)以及转子机械过渡过程(以ω及δ为状态量)时,电机为七阶模型。对于一个含有上百台发电机的多机电力系统,若再加上其励磁系统、调速器和原动机的动态方程,则将会出现“维数灾”给分析计算带来极大的困难。因此在实际工程问题中,常对同步电机的数学模型作不同程度的简化,以便在不同的场合下使用。 2、对派克方程中的转子变量 若,则 可用定子侧等效量取代原来的转子量,得到用这些实用等效量表示的同步电机实用方程。原派克方程中的定子量,保留易测量及计算的和及和,而消去和两个变量。 3、三阶实用模型 其简单而又能计算励磁系统动态,因而广泛的应用于精度要求不十分高,但仍需计及励磁系统动态的电力系统动态分析中,较适用于凸极机。 模型导出基于: (1)、忽略定子d绕组、q绕组的暂态,即定子电压方程中取P=P=0 (2)、在定子电压方程中,设ω≈(p.u.)在速度变化不大的过渡过程中,其引起的误差很小。 (3)、忽略D绕组、Q绕组,其作用可在转子运动方程补入阻尼项来近似考虑。 及以下三个定子侧等效实用变量: 为消除转子励磁绕组的变量 、 定子励磁电动势 电机(q轴)空载电动势 电机瞬变电动势 (二)、励磁系统数学模型: 描述同步发电机励磁系统(包括励磁调节器)物理过程的数学方程。是电力系统机电暂态过程数学模型的重要组成部分,主要应用于电力系统稳定计算。
物流仿真大作业.doc
物流系统仿真 期末作业 题目:Manufacturing System Planning and Scheduling 班级:物流工程131 学号:1311393003 1311393008 姓名:黎宇帆张力夫 日期:2015-09-19 成绩:
制造系统规划与调度 翻译 2.1引言 现代生产调度工具是非常强大的,提供了广阔的范围内调整工具的行为的真实过程要求的选项和参数。 然而,更多的选项的存在,它就在实践中找到的工具的最佳配置更加困难。 即专家们经常无法预测的多种可能性的影响。 测试甚至一小部分在现实中可能的配置,对实际生产过程的影响可能需要几个月的时间,可能会严重降低整体性能。 因此,这样的试验在实践中是不可行的。 优化的生产调度仿真模型比使用真正的过程更安全,更便宜,更快,更容易测试。为了在一个中等规模的制造公司充分使用先进的调度工具的优势,找到它的一个最佳的规则和参数的优化配置。 模块化仿真模型的整个业务的制造系统和生产过程中阳极氧化阶段是建立以测试不同的调度配置的影响。调度工具的配置测试和优化进行了离线使用的仿真模型。实际生产过程不受干扰,可以非常快速、低成本的找到最优配置。 2.2问题描述 位于英国的一个中型制造商,生产一系列的不同的小压铝零件和一系列大批量的其他面向消费者的产品。典型的应用包括香水的喷雾组件和哮喘患者的分配器。这是一个高度竞争的行业,成功取决于是否能实现高效率和低成本制造。所以生产调度是非常重要的。 在过去,该公司安装的软件工具可以支持生产过程中的各个区域调度。全面提高公司绩效,增加产量和减少产品的交货时间,他们计划建立自动电抗器的供应链规划服务器–总调度系统协调当地所有的业务和生产区。为了提供最好的解决方案,调度工具供应商,预优国际(https://www.360docs.net/doc/3e11329913.html,)决定使用模拟求解调度工具的优化配置。 问题是建立一个仿真工具,它将接受的到来客户订单和生产订单排序以满足这些需求。一个重要的地方是模型的生产过程本身,以确保它的主要阶段的最佳时刻加载。阳极氧化阶段是整个生产过程中特别重要的,因此,它必须是非常详细的模拟,以测试到整体订单的交货时间可以通过阳极氧化过程阶段优化减少到什么程度。 在这种情况下的研究主要目标是以下几个: (1)为了确定公司模型间的相关业务和生产过程和确定订单和交货时间, (2)在规划部门分析和优化业务流程,为了处理传入的需求和规划生产订单。 (3)测试的整体生产时间,提高灵敏度,特别是确定是否引入特定排序规则的生产订单将减少在阳极氧化处理阶段总的处理时间。
信号与系统的MATLAB仿真
信号与系统的MATLAB 仿真 一、信号生成与运算的实现 1.1 实现)3(sin )()(π±== =t t t t S t f a )(sin )sin()sin(sin )()(t c t t t t t t t S t f a '=' '== ==πππ π ππ m11.m t=-3*pi:0.01*pi:3*pi; % 定义时间范围向量t f=sinc(t/pi); % 计算Sa(t)函数 plot(t,f); % 绘制Sa(t)的波形 运行结果: 1.2 实现)10() sin()(sin )(±== =t t t t c t f ππ m12.m t=-10:0.01:10; % 定义时间范围向量t f=sinc(t); % 计算sinc(t)函数 plot(t,f); % 绘制sinc(t)的波形 运行结果: 1.3 信号相加:t t t f ππ20cos 18cos )(+= m13.m syms t; % 定义符号变量t f=cos(18*pi*t)+cos(20*pi*t); % 计算符号函数f(t)=cos(18*pi*t)+cos(20*pi*t) ezplot(f,[0 pi]); % 绘制f(t)的波形 运行结果:
1.4 信号的调制:t t t f ππ50cos )4sin 22()(+= m14.m syms t; % 定义符号变量t f=(2+2*sin(4*pi*t))*cos(50*pi*t) % 计算符号函数f(t)=(2+2*sin(4*pi*t))*cos(50*pi*t) ezplot(f,[0 pi]); % 绘制f(t)的波形 运行结果: 1.5 信号相乘:)20cos()(sin )(t t c t f π?= m15.m t=-5:0.01:5; % 定义时间范围向量 f=sinc(t).*cos(20*pi*t); % 计算函数f(t)=sinc(t)*cos(20*pi*t) plot(t,f); % 绘制f(t)的波形 title('sinc(t)*cos(20*pi*t)'); % 加注波形标题 运行结果:
系统仿真示例
Flexsim应用案例示例 示例一港口集装箱物流系统仿真 (根据:肖锋,基于Flexsim集装箱码头仿真平台关键技术研究,武汉:武汉理工大学硕士学位论文,2006改编) 1、港口集装箱物流系统概述与仿真目的 1.1港口集装箱物流系统概述 1.2港口集装箱物流系统仿真的目的 2、港口集装箱物流系统的作业流程 2.1港口集装箱物流系统描述 2.2港口集装箱物流系统作业流程 2.3港口集装箱物流系统离散模型分析 3、港口集装箱物流系统仿真模型 3.1港口集装箱物流系统布局模型设计 3.2港口集装箱物流系统设备建模 3.3港口集装箱物流系统仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据的结果分析 小结与讨论 示例二物流配送中心仿真 (根据:XXX改编) 1、物流配送中心概述与仿真目的 1.1物流配送中心简介 1.2仿真目的 2、配送中心的作业流程描述 2.1配送中心的功能 2.2配送中心的系统流程
3、配送中心的仿真模型 3.1配送中心的仿真布局模型设计 3.2配送中心的设备建模 3.3配送中心的仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据结果分析 4.3系统优化 小结与讨论 “我也来编书”示例 示例一第X章排队系统建模与仿真学习要点 1、排队系统概述 2、排队系统问题描述 3、排队系统建模 4、排队系统仿真 5、模型运行与结果分析 小结 思考题与习题(3-5题) 参考文献 1、李文锋,袁兵,张煜.2010.物流系统建模与仿真(第6章) 北京:科学出版社 2、王红卫,谢勇,王小平,祁超.2009.物流系统仿真(第6章) 北京:清华大学出版社 3、马向国,刘同娟.2012.现代物流系统建模、仿真及应用案例(第5章)
系统建模与仿真
一、基本概念 1、数字正弦载波调制 在通信中不少信道不能直接传送基带信号,必须用基带信号对载波波形的某些参量进行控制,使得载波的这些参量随基带信号的变化而变化,即所谓数字正弦载波调制。 2、数字正弦载波调制的分类。 在二进制时, 数字正弦载波调制可以分为振幅键控(ASK)、移频键控(FSK)和移相键控(PSK)三种基本信号形式。如黑板所示。 2、高斯白噪声信道 二、实验原理 1、实验系统组成 2、实验系统结构框图
图 1 2FSK信号在高斯白噪声信道中传输模拟框图 各个模块介绍p12 3、仿真程序 x=0:15;% x表示信噪比 y=x;% y表示信号的误比特率,它的长度与x相同FrequencySeparation=24000;% BFSK调制的频率间隔等于24KHz BitRate=10000;% 信源产生信号的bit率等于10kbit/s SimulationTime=10;% 仿真时间设置为10秒SamplesPerSymbol=2;% BFSK调制信号每个符号的抽样数等于2 for i=1:length(x)% 循环执行仿真程序 SNR=x(i);% 信道的信噪比依次取中的元素 sim('project_1');% 运行仿真程序得到的误比特率保存在工作区变量BitErrorRate中 y(i)=mean(BitErrorRate); end hold off% 准备一个空白的图 semilogy(x,y);%绘制的关系曲线图,纵坐标采用对数坐标 三、实验结论
图 4 2FSK信号误比特率与信噪比的关系曲线图 系统建模与仿真(二) ——BFSK在多径瑞利衰落信道中的传输性能 一、基本概念 多径瑞利衰落信道 二、实验原理 1、实验系统组成
电力系统建模及仿真课程设计
某某大学 《电力系统建模及仿真课程设计》总结报告 题目:基于MATLAB的电力系统短路故障仿真于分析 姓名 学号 院系 班级 指导教师
摘要:本次课程设计是结合《电力系统分析》的理论教学进行的一个实践课程。 电力系统短路故障,故障电流中必定有零序分量存在,零序分量可以用来判断故障的类型,故障的地点等,零序分量作为电力系统继电保护的一个重要分析量。运用Matlab电力系统仿真程序SimPowerSystems工具箱构建设计要求所给的电力系统模型,并在此基础上对电力系统多中故障进行仿真,仿真波形与理论分析结果相符,说明用Matlab对电力系统故障分析的有效性。实际中无法对故障进行实验,所以进行仿真实验可达到效果。 关键词:电力系统;仿真;短路故障;Matlab;SimPowerSystems Abstract: The course design is a combination of power system analysis of the theoretical teaching, practical courses. Power system short-circuit fault, the fault current must be zero sequence component exists, and zero-sequence component can be used to determine the fault type, fault location, the zero-sequence component as a critical analysis of power system protection. SimPowerSystems Toolbox building design requirements to the power system model using Matlab power system simulation program, and on this basis, the power system fault simulation, the simulation waveforms with the theoretical analysis results match, indicating that the power system fault analysis using Matlab effectiveness. Practice can not fault the experiment, the simulation can achieve the desired effect. Keywords: power system; simulation; failure; Matlab; SimPowerSystems - 1 - 目录 一、引言 ............................................ - 3 -
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
制造系统建模与仿真知识点2
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
通信系统建模与仿真课程设计
1 任务书 试建立一个基带传输模型,采用曼彻斯特码作为基带信号, 发送滤波器为平方根升余弦滤波器,滚降系数为0.5,信道为加性高 斯信道,接收滤波器与发送滤波器相匹配。发送数据率为1000bps , 要求观察接收信号眼图,并设计接收机采样判决部分,对比发送数据 与恢复数据波形,并统计误码率。另外,对发送信号和接收信号的功 率谱进行估计。假设接收定时恢复是理想的。 2 基带系统的理论分析 2.1基带系统传输模型及工作原理 基带系统传输模型如图1所示。 发送滤波器 传送信道 接收滤波器 {an} n(t) 图1 基带系统传输模型 1)系统总的传输特性为(w)()()()H GT w C w GR w ,n (t )是信道中 的噪声。 2)基带系统的工作原理:信源是不经过调制解调的数字基带信号, 信源在发送端经过发送滤波器形成适合信道传输的码型,经过含有加
性噪声的有线信道后,在接收端通过接收滤波器的滤波去噪,由抽样 判决器进一步去噪恢复基带信号,从而完成基带信号的传输。 2.2 基带系统设计中的码间干扰及噪声干扰 码间干扰及噪声干扰将造成基带系统传输误码率的提升,影响基 带系统工作性能。 1)码间干扰及解决方案 a ) 码间干扰:由于基带信号受信道传输时延的影响,信号波形 将被延迟从而扩展到下一码元,形成码间干扰,造成系统误码。 b) 解决方案: ① 要求基带系统的传输函数H(ω)满足奈奎斯特第一准则: 2(),||i i H w Ts w Ts Ts ππ+ =≤∑ 不出现码间干扰的条件:当码元间隔T 的数字信号在某一理想低通 信道中传输时,若信号的传输速率位Rb=2fc (fc 为理想低通截止频 率),各码元的间隔T=1/2fc ,则此时在码元响应的最大值处将不 产生码间干扰。传输数字信号所要求的信道带宽应是该信号传输速 率的一半:BW=fc=Rb/2=1/2T ② 基带系统的系统函数H(ω)应具有升余弦滚降特性。 如图2所示:滚降系数:a=[(fc+fa)-fc]/fc
PSCAD的电力系统仿真大作业3
仿真计算 1、在PSCAD中建立典型的同步发电机模型,对同步发电机出口三相短路进行仿真研究。要求: (1)运行“同步发电机短路”模型,截取定子三相短路电流波形,并对波形进行分析,验证与理论分析中包含的各种分量是否一致; 图一同步发电机短路模型
图二、定子三相短路电流 定子三相短路电流中含有直流分量和交流分量,其中周期分量会衰减。三相短路电流直流分量大小不等,但衰减规律相同,均按指数规律衰减,衰减时间常数为Ta,由定子回路电阻和等值电感决定,大约在0.2s。交流分量也按指数规律衰减,它包括两个衰减时间常数,分为次暂态过程、暂态过程和稳态过程。 (2)修改电抗参数Xd(Xd’,X’’d),增加或者减小,截取定子三相电流,并与第一步结果对比分析; 图一是Xd`=0.314 p.u,Xd``=0.280 p.u情况下的定子电流波形;图二是Xd`=0.514 p.u, Xd``=0.280 p.u情况下的定子电流波形。显然,随着Xd`的增大定子的电流在减少。
图三、定子三相短路电流 (3)修改时间常数Td(Td’,T’’d),增加或者减小,截取定子三相电流,并与第一步结果对比分析。 参数Td’=6.55s ,Td”=0.039s时定子电流如图一所示;当参数变为Td’=3.55s ,Td”=0.039s是定子电流如图三所示,显然
图四、定子三相短路电流 2、利用暂态仿真软件对下面的简单电网进行建模,对模型中各元件参数进行详细说明,并进行短路计算。将故障点的电流电压波形及线路M端的电流电压波形、相量图粘贴到课程报告上。 要求:
(1)短路类型为①三相故障;②A相接地;③BC两相故障。 (2)两端系统电势夹角取15o δ=。 (3)故障点设置为线路MN中点(25km处)。 (4)仿真结果包括M、N两侧和短路点处的三相电压、电流的瞬时值波形和短路发生后时刻的三相电压、电流相量图。 三、课程学习心得 通过本课程的学习,你有哪些体会和心得,请写出来。可以从以下几个方面考虑,但不局限于这些方面:通过课程你学到了哪些知识;学会了哪些方法;对电力系统的认识;对课程的建议等。 课程的开始复习了一下简单的电力系统稳态分析部分,然后就进行了课程的重点就是电力系统的暂态分析,其中包括PARK变换、标么值下的磁链方程和电压方程、同步发电机各种电势的表达式、发电机阻抗的概述、(次)暂态电抗和(次)暂态电势、发电机三相短路电流、对称分量法、叠加定理、电力系统简单故障分析。学习了几种电力系统分析中的方法,例如分析同步发电机短路时PARK变换将静止三相坐标系的量转化为旋转坐标系dq0的量,还有分析不对称故障时对称分量法转化到相对简单的对称故障分析中。
《生产系统建模与仿真》教学大纲
《生产系统建模与仿真》教学大纲 (理论课程) 开课系(部):工程学院课程编号:010396 课程类型:专业课总学时:48 学分:3 适用专业:工业工程开课学期:2014-2015学年第一学期 先修课程:概率论与数理统计、C语言程序设计、系统工程导论 一、课程简述 《生产系统建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。 本课程具有较强的理论性,同时具有较强的实践性和应用性,能够有效增强学生的系统仿真理论基础,提高学生对系统仿真、分析工作的适应性,培养其开发创新能力。 本课程的教学目标是培养学生的设计能力、创新能力和工程意识。课程以制造型生产企业为核心,通过理论教学和实践环节相结合,阐述了离散事件系统建模与仿真技术在生产企业分析中的基本原理和方法。其容涉及计算机仿真技术在生产系统分析中的作用和原理、仿真软件的介绍,重点介绍排队系统、库存系统、加工系统以及输入、输出数据分析。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理;并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能;使学生了解计算机仿真的基本步骤。 二、课程要求 (一)教学方法 1、启发式课堂讨论 针对关键知识点、典型题和难题,通过教师提问,鼓励学生回答问题或请到讲台前做题,并请其他学生评判或提出不同的答案或不同的解决方法。目的是加强学生自主学习的能力和判断能力,培养主动思考的习惯,启发学生的探索精神。 2、重视在教学中加强知识演进的逻辑规律的讲解 提高学生的逻辑思维能力,培养学生分析问题、解决问题的能力。 3、加强计算机辅助设计、分析 将Flexsim仿真软件引入教学中。应用计算机辅助设计、分析,能方便的改变系统
信号与系统仿真作业
nGDOU-B-11-112广东海洋大学学生实验报告书(学生用表) 课程名称课程号学院(系)信息学院 专业班级 学生姓名学号 实验地点04002 实验日期 实验一连时间信号的MATLAB表示 和连续时间LTI系统的时域分析 一、实验目的 1.掌握MATLAB产生常用连续时间信号的编程方法,并熟悉常用连续时间信号的波形和特性; 2.运用MATLAB符号求解连续系统的零输入响应和零状态响应; 3.运用MATLAB数值求解连续系统的零状态响应; 4.运用MATLAB求解连续系统的冲激响应和阶跃响应; 5.运用MATLAB卷积积分法求解系统的零状态响应。 二、实验原理 1. 连续信号MATLAB实现原理 从严格意义上讲,MATLAB数值计算的方法并不能处理连续时间信号。然而,可用连续信号在等时间间隔点的取样值来近似表示连续信号,即当取样时间间隔足够小时,这些离散样值能够被MATLAB处理,并且能较好地近似表示连续信号。
MATLAB提供了大量生成基本信号的函数。比如常用的指数信号、正余弦信号等都是MATLAB的内部函数。为了表示连续时间信号,需定义某一时间或自变量的范围和取样时间间隔,然后调用该函数计算这些点的函数值,最后画出其波形图。 三、实验内容 1.实例分析与验证 根据以上典型信号的MATLAB函数,分析与验证下列典型信号MATLAB程序,并实现各信号波形图的显示,连续信号的图形显示使用连续二维图函数plot()。 (1) 正弦信号:用MATLAB命令产生正弦信号2sin(2/4) ππ+,并会出时间0≤t≤3的波形图。 程序如下: K=2;w=2*pi;phi=pi/4; t=0:0.01:3; ft=K*sin(w*t+phi); plot(t,ft),grid on; axis([0,3,-2.2,2.2]) title('正弦信号')
系统建模与仿真课后作业
、系统、模型和仿真三者之间具有怎样的相互关系 答:系统是研究的对象,模型是系统的抽象,仿真通过对模型的实验以达到研究系统的目的。 、通过因特网查阅有关蒲丰投针实验的文献资料,理解蒙特卡罗方法的基本思想及其应用的一般步骤。 答:蒲丰投针实验内容是这样的:在平面上画有一组间距为a的平行线,将一根长度为L(L (1)实体流图 (2)活动循环图 、以第二章中图2-5所示的并行加工中心系统为对象,建立Petri 网模型。 3214所示Petri 网模型的运行过程,并将分析结果同例3-5相比较。 、任取一整数作为种子值,采用第三题中得到的随机数发生器生成随机数序列的前200项数据,并对其统计性能进行检验。 解:由第3题可得到一个随机数发生器: a=5 b=9 c=3 m=512 取种子值,生成的随机数序列前200项数据如下: n n 5000032458 4 t t P t P P P P t P (2)t3发 生后 t t P t P P P P t P (3)t2发 生后 (4)t1不能 发生 t t P t P P P P t P (5)t4发 生后 开题报告 电气工程及其自动化 基于MATLAB/simulink的船舶电力系统建模与故障仿真 一、综述本课题国内外研究动态,说明选题的依据和意义 1、本课题国内外研究动态 船舶电力系统是一个独立的、小型的完整电力系统,主要由电源设备、配电系统和负载组成。船舶电站是船上重要的辅助动力装置,供给辅助机械及全船所需电力。它是船舶电力系统的重要组成部分,是产生连续供应全船电能的设备。船舶电站是由原动机、发电机和附属设备(组合成发电机组)及配电板组成的。最近几年,船舶电站采用电子技术、计算机控制技术,实现船舶电站自动化和船舶电站的全自动控制,实现无人值班机舱。船舶自动化技术正朝着微机监控、全面电气、综合自动化方向发展。船舶电站运行的可靠性、经济性及其自动化程度对保证船舶的安全运营具有极其重要的意义。 国外的某些造船业发达的国家在二十世纪中叶就着手船舶电力系统领域的探索,在船舶电力系统稳态、暂态过程等方面进行了细致的研究。近些年来,挪威挪控公司困.R.co咖l)、英国船商公司(TRANSS)、德国西门子公司(SIEMENS)、-日本三菱公司(MITSUBISHD等大公司开始进行船舶电力系统的建模与分析方面的研究工作。国内针对船舶电力系统的研究起步相对较晚,虽然取得了一定成果,但在理论先进性、系统完整性等方面还存在一定差距,这也在一定程度上导致了目前国产船电设备与世界主要造船国家船电设备存在一定差距、装船率偏低等一系列问题。 目前,国内外最常用的建模软件有四中:分别是:matlab、lingo、Mathematica 和SAS。MATLAB用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。Matlab开发效率高,自带很多数学计算函数,对矩阵支持好。Lingo可以用于求解非线性规划,也可以用于一些线性和非线性方程组的求解等,功能十分强大,是求解优化模型的最佳选择。Mathematica是一款科学计算软件,很好地结合了数值和符号计算引擎、图形系统、编程语言、文本系统、和与其他应用程序的高级连接。SAS 是一个模块化、集成 成绩 1. (4)求解差分方程:y(n)-y(n-1)-2y(n-2)=f(n) ?f(n)=( 1 )nε (n) Simulink仿真 根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图。 图3 根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4。 图4 可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的。 速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。 所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。我们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为。当然,这是需要时间和经验的。 校正后的动态结构图如图5所示 图5 校正后的输出转速曲线如图6所示 图六 电流环跟随性能仿真实验 如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。这就需要我们对电流环的跟随性能加以分析。将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。电流环模型如图7所示: 图7 通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。 [num,den]=linmod('current_loop') sys=tf(num,den) figure(1) margin(sys) [mag,phase,w]=bode(sys); [gm,pm,wcg,wcp]=margin(mag,phase,w) Figure(2) Nyquist(sys) Figure(3) Step(sys) 我们还可以得到以下的数据: gm = 4.2925 pm =47.7281 wcg =345.3056 cp =164.6317 剪切频率ωc=164.6317rad/s;相角相对裕度δ=47.7281°;-∏穿越频率ω g=345.3056rad/s 幅值相对裕度Lh=20lg(4.2925)=12.65dB 电 力 系 统 仿 真 作 业 论 文 电控学院 电气0903 刘娟 0906060301 离散可编程三相电压源PLL和可变频率正序电压和功率测量 the Discrete 3-Phase Programmable Voltage Source PLL and Variable-Frequency Positive-Sequence Voltage and Power Measurements 线路图: 线路结构: 一个25KV,100MVA的短路等效电路网络给一个5MW,5Mvar的负载供电。电源的内部电压通过离散的三相可编程电压源装置来提供。三相电压电流测量装置用来检测三个负载电压和电流。 离散的三相PLL装置用来测量频率,也产生一个基于频率变化的系统电压信号。PLL用来驱动两个测量装置,并把变化的频率考虑在内。其中一个用来计算正序负载电压的标幺值,另外一个用来计算负载的有功和无功功率。这两个装置和PLL必须初始化,以保证初始处在稳态。 PLL和两个测量装置分别在Extras/Discrete in the Control Block 和 Extras/Discrete Measurements中可以找到。 整个系统(包括网络,PLL和测量装置)以50us的采集时间来离散。仿真时间4.0秒,仿真参数ode45(Dormand-Prince)。 基本原理: PLL的概念 PLL其实就是锁相环路,简称为锁相环。许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。锁相环路是一种反馈控制电路,简称锁相环(PLL)。目前锁相环主要有模拟锁相环,数字锁相环以及有记忆能力(微机控制的)锁相环。 PLL的特点 锁相环的特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 PLL的组成 锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如下图所示。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成uD(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压uC(t),对振荡器输出信号的频率实施控制。 新疆财经大学实验报告 课程名称:物流管理综合实验 实验项目名称:系统建模与仿真 学号: 2013104059 姓名:曾华艳 班级:物流管理11-1 指导教师:林秋平 2014年 6月 2日 新疆财经大学实验报告 《铁路局联通营业厅排队仿真分析实验报告》 一、实验目的 (一)通过对铁路局联通营业厅运作的观察,建立计算机仿真全过程,对营业厅运作进行数据采集、建模和仿真分析,为联通营业厅提出改进和优化方案的建议。 (二)通过这次实验活动,全面了解计算机仿真技术在物流领域、生产制造领域等离散事件系统中的应用,理解仿真技术如何辅助管理人员进行决策。 (三)通过分组合作的形式,提供一种系统仿真工作中常见的团队协作方式的实践体验,培养协调工作、共同完成任务的能力。 二、系统描述 人们进入联通营业厅,首先要通过取票系统拿到自己的号,先在等待区等待叫号系统报自己的号。一共有2个服务台,2个服务台同时工作,哪个服务台叫到几号,拿这个号码的人就去哪个服务台,叫号系统按顺序叫号,2个服务台叫号不会发生重复现象。我们组决定针对铁路局联通营业厅叫号排队办理业务的过程进行研究,因此我们采集了仿真模型相关数据。记录了每位顾客到达时间、等待时间和离开时间。将收集的数据整理,录入excel中,并计算出了顾客的到达时间间隔和被服务时间,再利用flexsim建立仿真模型进行仿真分析与优化。 三、小组分工 (一)本组成员 1.组长:曾华艳 2.组员:晁芙蓉、陈磊、阿尔孜姑丽、宗泽宁、张振恒 (二)小组分工 1.调查收集数据和模型优化:全体成员 2.数据录入:晁芙蓉、张振恒、阿尔孜姑丽 3.数据处理:宗泽宁、阿尔孜姑丽 4.仿真模型建立与分析:陈磊、曾华艳 5.实验报告:曾华艳、晁芙蓉、宗泽宁 6.PPT 制作:张振恒、陈磊基于MATLABsimulink的船舶电力系统建模与故障仿真【开题报告】
信号与系统的MATLAB仿真
课程设计说明书(计算书、论文)
题 目 信号与系统的 MATLAB 仿真
课 程 名 称 院 (系)
信号与系统 电子通信工程学院
专 业 班 级 学 生 姓 名 学 号
设 计 地 点 指 导 教 师
设计起止时间:
年
月 日
至
年
月
日
课程设计应达到的目的
(1)熟悉 Matlab 软件的运行环境 (2)掌握采用 Matlab 软件程序实现信号与系统分析的方法 (3)掌握正确的编程过程和仿真分析 (4)总结对比软件仿真与硬件实验的区别及特点 2.课程设计题目及要求 《信号与系统》课程设计选题主要是要体现本课程的主要教学 内容中的重点部分,同时要求选题能过反映出信号仿真的代表性, 系统分析的应用性, 灵活性, 并且能与原本理论教学中繁琐的数学 计算相比较, 体现出软件计算的方便快捷性, 本课程设计主要包括 四个小设计部分,分别是: (1)信号的产生与简单运算:产生一个方波周期为 4π ,t[0 50]。
(2)?求解微分方程:y"(t)+3y'(t)+2y(t)=2e-2 ε(t)求 yzs; ?求卷积:e-2 ε (t)*e-3 ε (t)
t t
t
(3)求 H (s) ?
2s 2 ? 1 s 3 ? 4s 2 ? 6s ? 9
?求零、极点 ?并绘图 ?冲激响应
3
?f(n)=δ (n)
3.课程设计思路 利用信号与系统中的 matlab 常用命令集求解微分方程,并利用结 果和绘图命令绘图。
4.课程设计原理 设计原理 (1)设计一个简单程序能实现方波信号的生成。 利用Matlab软件的信号处理工具箱(Signal Processing Toolbox)中的专用函数产生 信号并绘出波形。
(2) ?对于求方程的零状态响应,即是求解常微分方程。Matlab 解常微分方程式的语法是 dsolve('equation','condition'),其中equation代表常微分方程式即 y'=g(x,y), 且须以Dy代表一 微分项y'',condition则为初始条件。 ?利用MATLAB中conv命令求解卷积。 阶微分项y' D2y代表二阶系统建模与仿真仿真作业结果
电力系统仿真作业(电子版)
曾华艳组离散事件系统仿真大作业