集成运放参数测试仪[2005年电子大赛一等奖
集成运放参数测试仪[2005年电子大赛一等奖]
摘要:本系统参照片上系统的设计架构、采用FPGA与SPCE061A相结合的方法,以SPCE061A单片机为进程控制和任务调度核心;FPGA做为外围扩展,内部自建系统总线,地址译码采用全译码方式。FPGA内部建有DDS控制器,单片机通过系统总线向规定的存储单元中送入正弦表;然后DDS控制器以设定的频率,自动循环扫描,生成高精度,高稳定的5Hz基准测量信号。扫频信号通过对30MHz的FPGA系统时钟进行分频和外部锁相环(FPGA采用FLEX10K10无内部锁相环)倍频,产生高频率稳定度、幅值稳定度的扫频信号。放大器参数测量参照GB3442-82标准,低频信号幅度的测量采取AD高速采样,然后进行数字处理的方法;高频信号的幅度直接采用集成有效值转换芯片测得。A/D 转换采用SPCE061A内部自带的10位AD。SPCE061A主要实现用户接口界面(键盘扫描、液晶显示、数据打印以及其他服务进程的调度)、AD转换以及测量参数(Vio Iio Kcmr Avd BWG Tr)计算、与上位机通信等方面的功能。上位机主要实现向下位机发送测量指令、与下位机交换测量数据、以及数据的存储、回放、统计。
关键词:参数测量运算放大器 DDS FPGA SPCE061A 数字信号处理
一、方案比较设计与论证
(一)测量电路模块
1、测试信号源部分
方案一:利用传统的模拟分立元件或单片压控函数发生器MAX038,可产生三角波、方波、正弦波,通过调整外围元件可以改变输出频率、幅度,但采用模拟器件由于元件分散性太大,即使用单片函数发生器,参数也与外部元件有关,外接电阻电容对参数影响很大,因而产生的频率稳定度较差、精度低、抗干扰能力差、成本也较高。
方案二:采用锁相式频率合成方案。锁相式频率合成是将一个高稳定度和高精度的标准频率经过运算,产生同样稳定度和精确度的大量离散频率的技术,他在一定程度上满足了既要频率稳定精确,又要在大范围内变化的矛盾。但其波形幅度稳定度较差,在低频内波形不理想。
方案三:采用DDS技术。DDS以Nyquist时域采样定理为基础,在时域内进行频率合成,其相位、幅度都可以实现程控,而且用FPGA来实现非常简单。
在这里我们只需要一个5Hz的单一稳定频率,要求其频率,幅度稳定。综合考虑,我们采用方案三,实现了高精度,高稳定度的5Hz测试信号源。
2、主测试电路
方案一:将测试放大器参数的实现分成4个电路检测。该方案实现各个参数的测量比较好,且有利于各个参数调试。但是对于要实现智能测试该方案较复杂,在电路中所用的继电器太多,很容易引起电磁干扰,不利于系统的整体性能提高,且不能实现电路的智能测试。
方案二:采用一级运放。该电路经过仔细的分析会发现它设计的非常的巧妙调试也很方便,不会产生自激、饱和等情况。缺点就是对与精度较高的运算放大器该方案实现不了。
方案三:采用试题中所给的电路。这是一个二级的电路,测试精度非常的高。但在调试中我们发现它很容易出现自激,为了使整个电路保持稳定,我们采取了一系列的稳定措施,如采用雕刻机雕刻线路,并实现大面积的接地,辅助运放加入补偿矫正网络等。
综合上述,为了实现自动测量,保证测试有更高的精度,采用方案三。
3、信号放大电路
方案一:采用普通的运算放大器放大电路。运算放大器放大电路成熟可靠,选用不同的运算放大器,能够对各种信号进行很好放大。但其放大值固定,不能动态调整,不便于处理大范围变化信号。
方案二:采用程控可增益放大器。程控可增益放大器可用单片机方便的进行增益设定,十分有利于处理大动态范围信号。
由于测量信号动态范围大,要有效的采样处理,就要求放大器增益可动态调整,由此我们选用方案二,采用可编程增益放大器AD625和数字电位器AD737组成程控增益放大器,实现对测量信号的有效放大。
4、滤波电路
方案一:采用二阶切比雪夫低通滤波器或二阶巴特沃斯低通滤波器。切比雪夫滤波器的幅度响应在通带内是在两值之间波动,在通带内波动的次数取决于滤波器的阶数。理想的在靠近截止频率的范围内比巴特沃斯有更接近矩形的频率响应。但这一点是一在频带内允许波动为代价的。巴特沃斯低通滤波器幅频响应是单调下降的,其N阶低通滤波器的前(2N-1)阶导数在频率为零处始终为零,故又称为最大平坦幅度滤波器。
方案二:采用数字滤波。数字滤波有极大的灵活性,可以在不增加任何硬件成本的基础上对信号进行有效的滤波,而且可以实现模拟器件难以实现的高阶滤波。但要进行高效率的滤波,对AD采样要求有较高的采样速率和时实性,对单片机要求有较高的数据运算速度。
方案三:采用模拟滤波器加数字滤波。先用模拟滤波器对信号进行简单的滤波处理,然后AD采样,进行数字滤波。这样既可以更加有效的对信号进行滤波,使有效信号更为纯净,便于后级数据处理,又降低了对ADC及单片机的要求,使得利用SPCE061A可以较轻松的实现
在本题中,测量输出有效信号同样为5Hz,但伴有大量的高频及较严重的50Hz工频干扰,为了保持通带内有效信号的平坦性及纯净,我们选用方案三,模拟用二阶巴特沃斯低通滤波器,数字滤波采用有限冲击响应法设置了低通滤波器及50Hz陷波器。
(二)信号采集模块
方案一:用AD736 RMS真有效值转换芯片,AD736的响应频率在0~10KHZ,采用该器件只需将被测的信号加到它的输入端上,就可以得到它的有效值,无需软件处理,测试非常的方便。但是我们在调试中现在AD736 在响应低频的时候不是很稳定,这样对整个系统会带来不稳定。因此我们没有选用这个方案。
方案二:采用A/D转换,将模拟信号数字化,然后进行数据处理。凌阳16位单片机内置有8路10位的A/D,运用起来非常的方便。无需外围的电路,转换精度也比较高,因此我们采用了方案二。
(三)用户接口模块
1、显示方案:
方案一:采用LED或字符型LCD显示。LED可以用移位寄存器74164或者专用芯片MA X7219驱动,字符型LCD也可以才用74LS164通过同步串口驱动。优点是控制比较简单,而且串行显示只占用很少的I/O口。但也有一个很大的缺点,只能显示一些简单的ASCII码字符,显示的信息量十分的有限,对于本系统较复杂的功能不太适合。
方案二:采用点阵型LCD显示。点阵型LCD虽然占用的I/O口资源较多,控制也较复杂,但其功能却是强大的,显示信息量大,可以保证良好的用户模式。且我们在系统中用FPGA设计的总线方式,扩展了I/O资源,就无须考虑I/O资源的限制了。
经过综合考虑我们选择方案二,不需要很复杂的电路就可以实现并扩展非常强大的显示功能。
2、键盘输入方案:
方案一:采用7289芯片与键盘相结合,键盘的整个控制只需4条控制线。程序的编写也比较简单且容易同LED显示接口。
方案二:不使用任何专用芯片,用一块74LS138译码输出8路扫描信号,3路扫描返回信号线接I/O口输入(我们设计的是3*8的键盘)。这种设计方案电路设计非常的简单,但是软件的编写要考虑软件去抖等,会比较复杂而且占用大量的CPU资源。
方案三:在FPGA内部构造一键盘扫描控制器,专门用以处理按键信息,并进行初步的处理(如键盘去抖),通过中断把键值发送给单片机。由于我们在FPGA内部已经建立了系统总线,扩展键盘非常简单。而且采用此方法外部硬件电路的设计也非常简单。
比较三者的优缺点我们选择了方案三,这样充分利用CPLD的功能硬件与软件设计都比较简单。
二、整机工作原理与功能实现
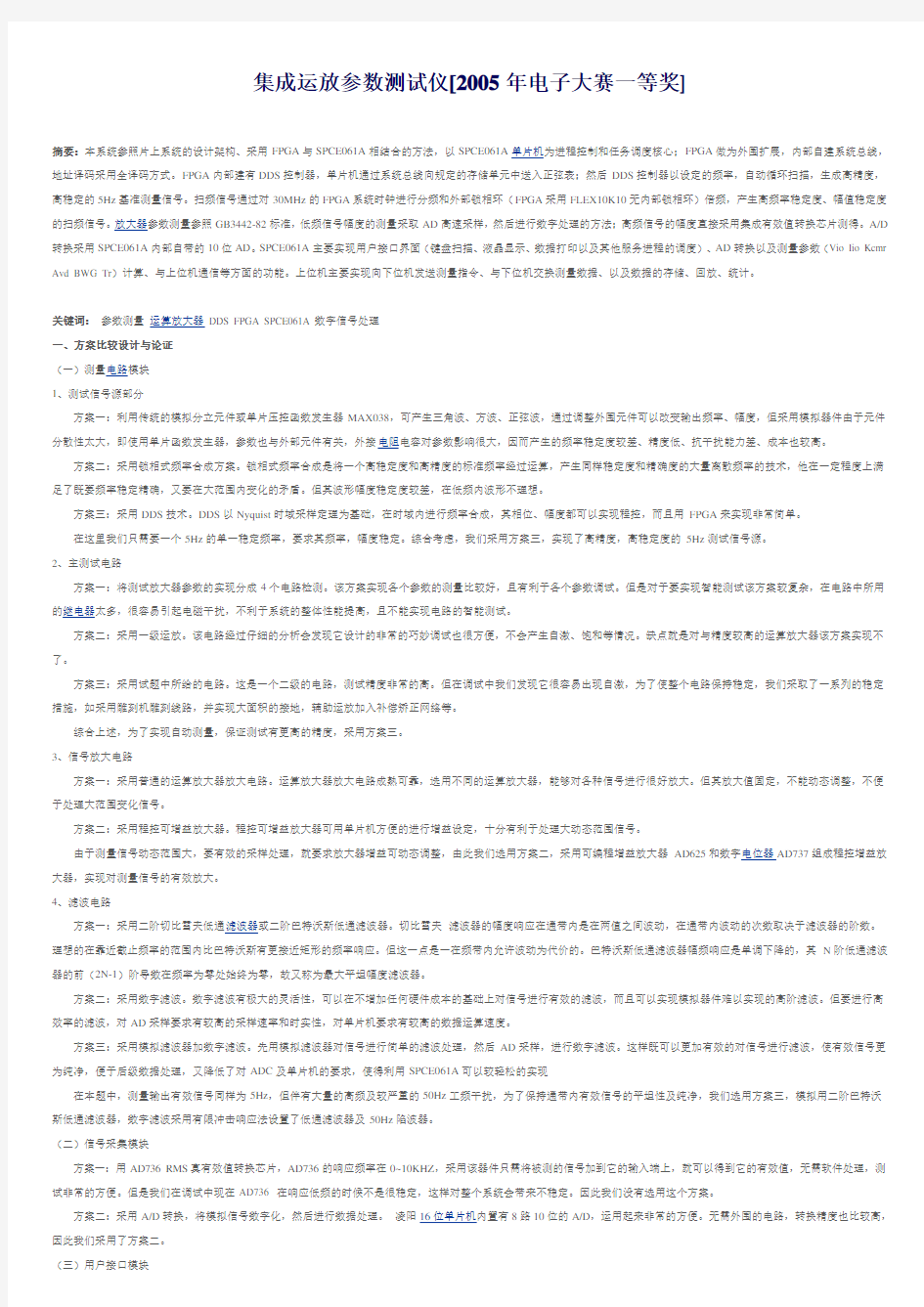
图2-1-1 系统整体结构示意图
系统电路原理图如图5-3-1所示。通过继电器的切换实现四个基本参数和大量程的转换。测量开环放大倍数和共模抑制比的基准信号采用DDS合成技术产生(DDS合成控制器通过硬件编程在FPGA内部生成)。信号的幅值通过精密整流后的响应信号高速采样,再经过数字信号处理的方法获得。采样信号的幅值测量采用等精度测量方法,通过程控放大器将采样信号的幅度控制在1-3.3V之间,这样可以使小信号测量时有效位数增多,又克服了测量大信号量程不足的限制。
-3dB带宽的测量,通过FPGA与外部锁相环对30MHz信号进行分频与倍频,产生高精确度的扫频信号,然后通过隔直电容加到被测放大器的同相输入端(放大器通过继电器切换接成单位增益组态),放大器的输出信号通过隔直电容加到有效值转换芯片的输入端。扫频信号从40kHz开始逐渐增大,同时通过AD检测有效值转换芯片的输出电压,当输出电压下降到原来的0.707倍时记下此时的频率值既是-3dB带宽截止频率。
上升时间的测量,单片机向某一特定地址中写入任意值,启动上升时间测量功能。接着FPGA输出一阶跃信号给被测放大器(被测放大器也接成单位增益组态),同时启动高速计数,放大器的输出信号送给一比较电平设为0.9Vdd的高速比较器,当放大器输出端的信号增大到0.9Vdd时比较器输出高电平,FPGA内部计数器停止计数。如图2-1-2根据此计数值和计数时钟的频率便可以得到上升时间。
图2-2-1无操作系统与有操作系统的区别
设计到很多的硬件、软件及其混合的设计。采用操作系统的架构来组织,将非常有利于我们小组各个成员之间的协作开发。有的人专注于服务进程以及用户界面和数据处理,有人专注于FPGA系统总线和外围器件以及底层驱动程序的设计。
Mini OS是一款拥有可裁剪、多任务的占先式内核的操作系统。它的任务调用及中断时间是可知道的,因此,采用Mini OS操作系统将大幅改善软件设计的环境,提高软件设计的规范。且该系统的底层模块完全采用汇编语言编写,然后采用操作系统调度的方法,很大程度上提高了系统的实时性和执行效率。如图2-2-2
图2-2-2 Mini OS 各进程示意图
(三)其他系统扩展
1、语音播报方案
为了丰富人机的接口我们增加了语音的播报利用凌阳SPCE061位单片机的语音处理功能。只须调用库函数即可以实现音频编程或自己录制语音资源就可以实现语音播放以及语音报警功能。
2、打印功能
为了能够将测量数据打印出来,我们采用了TL58打印机,该打印机小型、轻便、我们使用并口打印,控制也非常的方便。它带国家一、二级字库,可以满足一般打印的需求。
3、串口通信功能
为了适应网络化的趋势,为了能够进行大批量的数据统计与分析我们设计了此与上位机进行通讯的串行数据接口。我们可以通过此串行接口,将一批运放的测量参数上传到上位机,然后进行统计分析,对这一批运放的性能参数给出有效的估计。这在实际的科研、生产中比只测量一两个放大器的参数具有更大的意义。我们还可以通过上位机控制下位机测量相应的参数,并在显示屏上显示下位机无法显示的参数(如波特图、对正弦信号相应的频谱)具有虚拟仪器的功能。
三、各子模块的设计
(一)输入电压4~40mV、输入电流0~4mA量程转换:
量程转换通过继电器和程控放大器相结合实现。继电器切换大量程;程控放大器切换小量程,最终将信号的幅度控制在1-3.3V之间,这样既可以使小信号测量时有效位数增多,又克服了测量大信号量程不足的限制;保证了测量的精度和范围,实现等精度测量。
图3-3-1 DDS外围电路
(四)单位增益带宽测试:
在该功能中需要40KHZ--4MH Z的扫频信号,我们通过FPGA和外部锁相环对30MHz的系统时钟进行程控分频和倍频生成,从而使产生的频率可以进行数字控制,而且极其稳定。为了测试放大器的截止频率,我们需要检测单位增益组态的放大器对扫频信号的响应情况。对于如此高频的信号我们不能采用A/D采样方法处理了,而是采用RMS真有效值转换的芯片,进过实验的测试我们最终选用AD637芯片。它的标定响应频率为6MHZ。我们对其进行了检测,该芯片完全符合我们的需求。
图3-1-1 程控放大器原理图(自动量程转换)
(二)静态参数与动态参数的测量:
静态参数与动态参数的测量具有完全不同的特点,静态参数测量电路要考虑静态误差,系统稳定度等。动态参数测量电路要考虑电磁干扰以及高频信号的衰减补偿等。两个电路有着完全不同的设计方法和技术指标要求。我们在设计中采用两个电路分开设计的方法,在最后通过一个继电器实现两个电路的切换。
(三)5Hz 4V有效值正弦波的实现:
5HZ 4V信号在电路中要多次用到,对该信号的稳定度有较高的要求,该信号的好坏直接关系到测量的精度。我们采用先进的DDS直接数字频率合成技术,产生高幅值稳定度和频率稳定度的信号。外围电路如图3-3-1所示:
图3-4-1锁相环外围及接口电路
图3-4-2 BWG测量电路
(五)自动测量功能的实现:
我们采用了两大组继电器来控制电路状态,实现参数的自动测量。第一组为主测量电路部分,采用6个继电器实现四个基本参数的测量。由于测量BWG和Tr需要采用完全不同的电路,我们又加入两个继电器,很方便的实现两个电路的切换。示意图如图3-5-1:
(六)显示模块:
液晶显示采用金鹏的OCM4X8C型液晶显示模块,该模块是128×64点阵的汉字图形型液晶显示模块,可显示汉字及图形,内置国标GB2312码简体中文字库(16X16点阵)、128个字符(8X16点阵)及64X256点阵显示RAM(GDRAM)。可与CPU直接接口,提供两种界面来连接微处理机:8-位并行及串行两种连接方式。具有多种功能:光标显示、画面移位、睡眠模式等。
(七)键盘模块:
原理如图3-7-1所示。键盘通过FPGA进行管理,当有键按下时,触发中断;去抖后将数据发送给单片机,单片机主服务进程接受按键值,然后根据按键值调度相应的进程。
图3-7-1 键盘电路原理图
图3-7-2 键盘服务进程调度示意图
(八)、UART-PC机通讯:
串口是计算机与外部设备进行数据交换的重要介质,所以串行通信在实际工程实现中有着广泛的应用。而Microsoft公司的VC++6.0功能强大,其基础类库(MFC)封装了WIN32 API中的标准通信函数,可方便的支持串口通信。在放大器参数测试仪的设计中,能够很方便地将放大器的各个参数数据显示并存储。
我们运用了串口进行了下位机(单片机)与上位机(PC机)的通信。如图3-8-1上位机接收数据,显示数据界面。
图3-8-1上位机界面
二者通过RS-232串行口接收或上传数据和指令。传输介质为二芯屏蔽电缆,接线图如下图3-8-2所示:
图3-8-2 RS-232串行口接线图
RS-232信号的电平和单片机串口的电平不一致,必须进行二者之间的电平转换。在此使用的集成电平转换芯片MAX232为RS-232C/TTL电平转换芯片。它只使用单+5V为其工作,配接4个1UF电解电容即可完成RS-232电平与TTL电平之间的转换。其原理图如下图所示,转换完毕的串口信号TXD、RXD直接和单片机SPCE061A相连接。
图3-8-3 MA X232外围原理图
四、理论计算及分析
图4-1-1 主测量电路原理图
(一)开环放大倍数的测量
如图4-1-2继电器状态:K1,K2接地,K3,K4接通,K5接地,K6接信号输入端。整个电路构成一个大的环路负反馈,信号从R7端输入,根据虚短虚断的概念,因为R7上端与放大器的同相端相联,为地电位;所以节点OU T1的电位为:
( )
又:( 为放大器U2的输出电压)
得:
所以:
图4-1-2 开环放大倍数测量原理图
(二)输入失调电压的测量
继电器状态:K1,K2接地,K3,K4接通,K5,K6接地。如图4-2-1
K6接地,放大器U1的输出与放大器U2的同相端通过一电阻分压网络相连,而放大器U2的反相端接地。所以:
根据输入失调电压的定义:
( )
图4-2-1 输入失调电压测试原理图
(三)输入失调电流的测量
继电器状态:K1,K2接地,K3,K4断开,K5,K6接地。如图4-3-1
与上面相同有,所以有:
图4-3-1 输入失调电流测试原理图
(四)共模抑制比的测量
继电器状态:K1、K2接信号端,K3、K4闭合。K5,K6接地。如图4-4-1 运放应对共模信号有很强的抑制能力。表征这种能力的参数叫共模抑制比,用kCMR表示。它定义为差模电压增益AvD和共模电压增益Avc之比,即kCMR=∣AvD/Avc∣。
测试原理如图35.5所示。由于RF>>RI,该闭环电路对差模信号的增益AvD= RF/RI。共模信号的增益AvC= (VO/VS)。因此,只要从电路上测出VO和VS,即可求出共模抑制比
KCMR=∣AvD/Avc∣= (RF/RI)o(VS/VO)
KCMR的大小往往与频率有关,同时也与输入信号大小和波形有关。测量的频率不宜太高,信号不宜太大。
图4-4-1 共模抑制比测量原理图
(五) -3dB带宽F0
继电器状态:K7断开,K4闭合,K2接信号端;被测放大器构成单位增益状态。K9接OUT1将单位增益状态的放大器信号输出。
-3dB带宽的测量,通过FPGA与外部锁相环对30MHz信号进行程控分频与倍频,产生高精确度的扫频信号,然后通过隔直电容加到被测放大器的同相输入端(放大器通过继电器切换接成单位增益组态),放大器的输出信号通过隔直电容加到有效值转换芯片的输入端。扫频信号从40kHz开始逐渐增大,同时通过AD检测有效值转换芯片的输出电压,当输出电压下降到原来的0.707倍时记下此时的频率值既是-3dB带宽截止频率。
(六)转换速率(SR)和上升时间的测量
脉冲响应时间包括上升时间,下降时间、延迟时间、和脉动时间等。测试电路仍然采用以上电路,继电器状态K7断开,K4闭合,K2接信号端;被测放大器构成单位增益状态。K9接OUT1将单位增益状态的放大器信号输出。读取响应时间方法如下图所示。其中tr为上升时间,t f为下降时间,td(r)为上升延迟时间,td(f)为下降延迟时间。在单片机的控制下,FPGA发出一阶跃信号,同时触发高速计数,通过一高速比较器检测放大器的输出状态,当上升到0.9Vdd时锁存计数值,同时触发中断,将计数值送给单片机。单片机根据此计数值和计数频率便可以计算出上升时间。
图4-6-1 Tr示意图
五、电路图及有关设计文件
(一)电源电路:
为了保证足够的电源供应,我们制作了一个有±5V、±12V、±15V、0~30V可调的电压源。图5-1-1、图5-1-2是原理图
图5-1-1 电源电路
(二)单片机、FPGA系统板电路:
图5-2-1 单片机、FPGA系统图
SPCE061A单片机与FPGA为基本系统。数控部分采用SPCE061A同FPGA相结合,61单片机内置有32K Flash 存储和2K的RAM、8通道的10位A/D、10位D/A。我们用VHDL为FPGA编写了一个的总线控制器扩展SPCE061A的I/O端口。
(三)测量电路
图5-3-1 测量电路原理图
(四)精密整流电路
Vo1=0 (Vi)
Vo1=-Vi (Vi>=0) (1)
运放二构成反相加法器,其输入为Vi和Vo1,所以有
Vo=-Vi-2Vo1 (2)
将其带入式(1)中有:
Vo1=-Vi (Vi)
Vo1=+Vi (Vi >=0)
图5-4-1 精密整流电路原理图
(五)低通滤波电路
我们在这里设计了个=30Hz 的有源低通滤波电路。并通过继电器控制它的通断,我们把设计在30HZ主要是保护5H Z的信号不被衰减,也可以让50HZ及以上的干扰信号进行衰减。图2-2-6这些电路我们都是用Muilisim2001 软件进行严格的仿真及论证。在1~5ZH信号是960mV ,50Hz的信号是187mV(输入的交流信号在1V)
图5-5-1 低通滤波原理图
图5-5-2 5HZ低通滤波电路仿真图
六、系统测试
测量环境:24℃
日期:2005年9月10日
测试仪器:电源:WD990
示波器TDS2012
信号发生器GFG-8255A
数字万用表FLUKE175
失真度测量仪ZQ4126
交流毫伏表HG2170
PC P41.7G 128M内存
仿真器:SPCE061A PROBE;EL EDA
测试数据:
表6-1测试数据
抗干扰措施:
系统要测量信号非常微弱,最小数量级可达PA级,增益高,非常容易受干扰和产生自激。因此抗干扰措施必须做的很好,才能避免自激,减小噪声,提高测量精确度。通过理论分析和实验,我们采用下述方法减小干扰,避免自激。
1.将系统测量电路放入屏蔽盒中进行电磁屏蔽,避免空间高频电磁干扰,和工频干扰。
2.模数隔离。由于数字电路有非常大的高频对地干扰,非常容易对模拟电路产生影响。在电路板制作中我们采用了模拟地数字地一点接地。
3.由于主测量电路工作在高增益状态下,极易产生自激,使得测量无法进行。为消除自激,我们对辅助运放加上相位矫正网络,在靠近两运放处对正负供电进行电源去耦。去耦电容采用一大一小:大的选用漏电流较小的钅旦电解电容,小的采用具有优良高频特性的CBB电容。这些有效的保证了电路的稳定。
4.电源隔离。由于系统要有供电,其中继电器的开关噪声非常大,实际示波器测量可看到瞬间峰值可达1V,我们采用了完全的独立电源供电,有效减小对主测量电路的影响。
七、结论
基本完成了系统基本及发挥部分的要求,在某些方面性能有极大的提高,大大超过了要求。但由于时间紧张等原因,整个系统还存在着设计简陋,测量精度不是很高等问题。由于系统采用了模块化设计,系统还有很大的升级扩展空间。经过进一步的完善,完全可以应用于实际测量中。
参考文献:
1 电子电路设计与实践. 姚福安编著. 山东省科学技术出版社.2001
2 MCS-51单片微型计算机原理与接口技术. 东北大学出版社.1994
3 全国大学生电子设计竞赛组委会. 第四届全国大学生电子设计竞赛获奖作品选编.
4 凌阳16位单片机基础原理与应用. 北航出版社
5 计算机控制系统. 机械工业出版社
6 电子系统设计. 浙江大学出版社
7模拟集成电路应用. 山东大学出版社
8 VHDL数字电路设计应用实践教程. 机械工业出版社
9 FPGA设计及应用. 西安电子科技大学出版社
10 VC++6.0应用设计及提高电子工业出版社
全国电子设计大赛报告一等奖
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 摘要: 通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D采样后反馈给主控制器。控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D的值,同时由显示模块显示当前的P、D值。 关键字: 倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法
目录 一、设计任务与要求 (4) 1 设计任务 (4) 2 设计要求 (4) 二系统方案 (5) 1 系统结构 (5) 2 方案比较与选择 (5) (1)角度传感器方案比较与选择 (5) (2)驱动器方案比较与选择 (6) 三理论分析与计算 (6) 1 电机的选型 (6) 2 摆杆状态检测 (6) 3 驱动与控制算法 (7) 四电路与程序设计 (7) 1 电路设计 (7) (1)最小系统模块电路 (7) (2)5110显示模块电路设计 (8) (3)电机驱动模块电路设计 (9) (4)角位移传感器模块电路设计 (9) (5)电源稳压模块设计 (9) 2 程序结构与设计 (10) 五系统测试与误差分析 (11) 5.1 测试方案 (11) 5.2 测试使用仪器 (11) 5.3 测试结果与误差分析 (11) 6 结论 (12) 参考文献 (12) 附录1 程序清单(部分) (13) 附录2 主板电路图 (18) 附录3 主要元器件清单 (19)
集成运放参数测试仪
集成运放性能参数测试仪 一、集成运放性能参数测试仪性能指标 工作电压:±15V V IO:测量范围:0~40mV(<小于3%读数±1个字); I IO:测量范围:0~4μA(<3%读数±1个字); A VD:测量范围:60dB~120dB±3dB; K CMR:测量范围:60dB~120dB±3dB; 输出频率:5Hz 输出电压有效值:4 V 频率与电压值误差绝对值均小于1%; 二、设计思路: 本设计以单片机STC89C52为控制核心,利用数模转换器ADS1110以及继电器,为切换开关,对被测量信号进行采样,通过单片机处理完成对运算放大器LM741的UIO,IIO,AVC,KCMR等参数的测量。并通过系统显示接口,利用液晶显示装置将测试的结果进行显示,同时本系统还能通过键盘进行人机交流,实现按下一个按键就可以对该运放的某个参数进行测试。 三、系统结构图
四、方案比较与选择: 主控芯片部分 方案一:采用STC89C52单片机。优点是芯片结构简单,使用相对容易;缺点是不带AD转换电路,需要外接AD转换芯片,测量精度相对较低。 方案二:采用凌阳SPCE061A单片机。优点是自带AD转换模块,测量精度相对较高,能进行音频处理等多种智能化功能;缺点是结构复杂,使用起来相对繁琐。 由于此方案的核心内容在测试电路部分,主控芯片的选择对结果的影响相对较小,综合以上芯片的性能以及自身的情况,选择使用相对简单的STC89C52单片机。 信号发生器的选择
方案一:利用传统的模拟分立元件或单片压控函数发生器 MAX038,可产生三角波、方波、正弦波,通过调整外围元件可以改变输出频率、幅度,但采用模拟器件由于元件分散性太大,即使用单片函数发生器,参数也与外部元件有关,外接电阻电容对参数影响很大,因而产生的频率稳定度较差、精度低、抗干扰能力差、成本也较高。 方案二:采用ICL8038芯片产生信号。优点是电路简单,波形好,控制方便,缺点是频率有限。 由于需要的频率不宽,综合以上考虑,选择电路简单,波形好,控制方便,精度和抗干扰能力更强的ICL8038作为信号发生器。 显示模块的选择 方案一:采用液晶显示模块SVM12864(LCD)。占用I/O口多,控制复杂,但可以显示汉字和简单图形等,功能强大 方案二:采用液晶显示模块1602。占用I/O口少,控制简单,每行可显示16个字符。 虽然SVM12864功能相对强大,但是采用1602更为合理。因为需要显示的参数不多,且都是英文字母和数字,因此选择控制简单的1602液晶显示模块。 五、测量原理 2.1 失调电压Vios 理想运放当输入电压为零时,其输出电压也为零,但实际运放电路当
集成运放的主要参数和含义
集成运放数据手册中的主要参数和含义 一、直流参数: 1.---输入失调电压 为了是集成运放在零输入时达到零输出,需在其输入端加一个直流补偿电压,这个直流补偿电压的大小即为输入失调电压,两者方向相反。输入失调电压一般是毫伏(mV)数量级。采用双极型三极管作为输入级的运放,其为1-10mV;采用场效应管作为输入级的运放,其大得多;而对于高精度的集成运放,其的值一般很小。 2.---输入失调电压的温度系数 在确定的温度变化范围内,失调电压的变化与温度的变化的比值定义为输入失调电压的温度系数。一般集成运放的输入失调电压的温度系数为10-20;而高精度、低漂
移集成运放的温度系数在1以下。 3.----输入偏置电流 当集成运放的输入电压的输入电压为零,输出电压也为零时,其两个输入端偏置电流的平均值定义为输入偏执电流。两个输入端的偏置电流分别记为和,而表示为 双极型晶体管输入的集成运放,其为10nA-1;场效应管输入的集成运放,其一般小于1nA。 4.—输入失调电流 当集成运放的输入电压威灵,输出电压也为零时,两个输入偏置电流的差值称为输入失调电流,即 一般来说,集成运放的偏置电流越大,其输入失调电流也越大。输入偏置电流和输入失调电流的温度系数,分别用/ 和/来表示。由于输入失调电压和输入失调电流及输入偏置电流均为温度的函数,所以产品手册中均应注明这些参数的测试温度。另外,需要指出的是,上述各参数均与电源电压及集成运放输入端所加的共模电压值有关。手册中的参数一般指在标准电源电压值及零共模输入电压下的测试值。 5.---差模开环直流电压增益 集成运放工作在线性区时,差模电压输入以后,其输出电压变化与差模输入电压变化的比值,称为差模开环电压增益,即 = 差模开环电压增益一般用分贝(dB)为单位,可用下式表示 ( )=20lg()(dB)
全国大学生,电子设计竞赛,控制类备战刚要
全国大学生电子设计竞赛控制类赛题备战纲要 一笔丹青 QQ:2990731899 2013年,四旋翼飞行器首次出现在全国电赛的本科组题目中,电赛控制类开始从二维平面空间走向三维立体空间。对于这样的“跨越”,当年参赛的学生绝大多数准备并不充分,无可避免,13年四旋翼飞行器项目的比赛情况非常糟糕。本人亲历了13年的电赛,获得了控制类本科组全国一等奖,从2015年开始协助老师指导学生参加全国电赛,相较于13年,15年四旋翼飞行器项目的比赛情况好了很多,某种程度上,这要归功于近几年旋翼飞行器的飞速发展(大疆的崛起是最好的注解),互联网为大量实用的开源程序的传播提供了便利。 不得不说,在电赛所有类别的题目中,控制类绝对是“宠儿”,自2005年开始,每届电赛,控制类赛题几乎都是两个,如2011年:自由摆和小车;2013年:旋转倒立摆和四旋翼飞行器;2015年:风力摆和四旋翼飞行器。近日,收到关于电赛的许多咨询,一一回答效率太低,在此,针对电赛的准备,我列出了几点建议,请大家批评指正。 1.基础知识 1.1硬件方面 数电、模电、电路,熟悉基本元器件的使用,初期至少能够搭建稳定可用的单片机最小系统;后期逐渐掌握基于开关电源芯片的供电电源电路搭建,电机驱动电路搭建,液晶屏及数码管显示电路搭建等等; 1.2软件方面 熟练C语言,掌握模块化编程的思想,掌握硬软件联合调试办法,掌握参数整定办法(如最常用的PID算法,其参数整定尤为重要)。 2、常用元器件 2.1 电机 作为执行机构,一个控制系统中没有执行机构几乎没有意义。电机是最为常用的执行机构,如05年悬挂系统中的步进电机;07年、09年所用到小车的直流电机;11年自由摆的步进电机和智能小车的直流电机;13年旋转倒立摆的直流减速电机和四旋翼飞行器的空心杯直流电机;15年风力摆的直流电机、飞行器的空心杯直流电机。 鉴于此,在准备过程中,要很好的掌握直流电机、步进电机以及空心杯直流电机的使用。 2.2 传感器 控制系统离不开传感器,如:07年电赛跷跷板赛题采用的倾角传感器,09年声音引导系统所采用的拾音器;11年自由摆平板系统采用的角度传感器(光电编码器或者精密电位器);11年智能小车采用的光电接近开关;13年旋转倒立摆采用的光电编码器;13年四旋翼飞行器采用的三轴倾角传感器、陀螺仪、电子罗盘、测距传感器… 因此,常用的传感器必须掌握,如: ?旋转角度测量:光电编码器,精密电位器; ?倾斜角度测量:单轴倾角传感器,三轴倾角传感器,如SCA1600等;
毕业设计133集成运放参数测试仪
集成运放参数测试仪——程序设计 内容摘要:该课题设计的运算放大器闭环参数测试系统是基于MSC-51单片机控制模块,并且 由LCD(Liquid Crystal Display)显示模块,键盘模块,数据采集和转换模块,采用DDS芯片(AD9851)实现了40kHz~4MHz的扫频输出模块等五部分组成。采用辅助运放测试方法,可对运放的输入失调电压、输入失调电流、交流差模开环电压增益和交流共模抑制比以及单位增益带宽进行测量。在软件上,用C语言来编程实现。其要实现的功能包括:对来自TLC2543A/D转换的数字信号进行接收、分析、计算和对结果的显示;通过不同键值的接收、分析来控制对不同对象的测量,并在LCD上显示对应的人机界面;对来自DDS的高频信号源的频率进行控制来实现对集成运放的带宽参数的测试和显示。而且具有自动量程转换、自动测量功能和良好的人机交互性。 关键词:单片机 C语言 DDS LCD 人机交互界面 The Instrument for testing the Parameters of Integrated Operation Amplifier ——program design Abstract:This system is designed based on C51 microcontroller to measure the close loop parameters of the operation amplifier. The system conclude five modules: LCD (liquid crystal display) display module, keyboard module, data collection module, conversion module, and the module of generating sweep sine-wave signal with frequency range from 40 kHz to 4 MHz, using the DDS chip of AD9851. The system can measure the input offset voltage、the input offset current、the open loop AC differential mode voltage gain、the AC common mode rejection ratio and unit gain bandwidth,using the measure method of assistant amplifier. The data can be display on the LCD which is using of C program. And the function concludes: receiving, analysing and calculating the digital signals from TLC2543A/D then send them to show; accepting different key value on keyboards, analysing and processing it for controlling the measurement of different target and display on the LCD with different computer interface; controlling the bandwidth of HF signal source from DDS chip to measure the integrated transport bandwidth parameters and display the result. What’s more C51 microcontroller can control relays to complete auto measurement range switching ,auto measuring and good interface. Key Words:MCU CLanguage DDS LCD interface
实验5 集成运算放大器参数测试
实验五 集成运算放大器参数测试 一、实验目的: 1.通过对集成运算放大器741参数的测试,了解集成运算放大器组件主要参数的定义和表示方法。 2.掌握运算放大器主要参数的测试方法。 二、实验原理: 集成运算放大器是一种使用广泛的线性集成电路器件,和其它电子器件一样,其特性是通过性能参数来表示的。集成电路生产厂家为描述其生产的集成电路器件的特性,通过大量的测试,为各种型号的集成电路制定了性能指标。运算放大器的性能参数可以使用专用的测试仪器进行测试(“运算放大器性能参数测试仪”),也可以根据参数的定义,采用一些简易的方法进行测试。本次实验是学习使用常规仪表,对运算放大器的一些重要参数进行简易测试的方法。 实验中采用的集成运算放大器型号为741,其引脚排列如图5.1所示。它是一种八脚双列直插式器件,其引脚定义如下: ①、⑤调零端; 图 5.1 741引脚 ②反相输入端; ③同相输入端; ④电源负极; ⑥输出端; ⑦电源正极; ⑧空脚。 以下为主要参数的测试方法: 1.输入失调电压: 理想运算放大器,当输入信号为零时其输出也为零。但在真实的集
成电路器件中,由于输入级的差动放大电路总会存在一些不对称的现象(由晶体管组成的差动输入级,不对称的主要原因是两个差放管的U BE 不相等),使得输入为零时,输出不为零。这种输入为零而输出不为零的现象称为“失调”。为讨论方便,人们将由于器件内部的不对称所造成的失调现象,看成是由于外部存在一个误差电压而造成,这个外部的误差电压叫做“输入失调电压”,记作U IO或V OS。 输入失调电压在数值上等于输入为零时的输出电压除以运算放大器的开环电压放大倍数: 式中:U IO — 输入失调电压 U OO — 输入为零时的输出电压值 A od — 运算放大器的开环电压放大倍数 本次实验采用的失调电压测试电路如图5.2所示。闭合开关K1及K2, 使电阻R B短接,测量此时的输出电压U O1即为输出失调电压,则输入失调电压 图5.2 U IO,I IO测试电路 实际测出的U O1可能为正,也可能为负,高质量的运算放大器U IO一般在1mV以下。 测试中应注意: ①要求电阻R1和R2,R3和R F的阻值精确配对。 2.输入失调电流I IO 当输入信号为的零时,运放两个输入端的输入偏置电流之差称为输入失调电流,记为I IO(有的资料中使用符号I OS)。 式中:I B1,I B2分别是运算放大器两个输入端的输入偏置电流。 输入失调电流的大小反映了运放内部差动输入级的两个晶体管的失配度,由于I B1,I B2本身的数值已很小(μA或nA级),因此它们的差值通常不是直接测量的,测试电路如图5.2所示,测试分两步进行:1)闭合开关K1及K2,将两个R B短路。在低输入电阻下,测出输出
历年年全国大学生电子设计竞赛题目
历年年全国大学生电子设计竞赛题目 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
2015年全国大学生电子设计竞赛题目 【本科组】 双向DC-DC变换器(A题) 风力摆控制系统(B题) 多旋翼自主飞行器(C题) 增益可控射频放大器(D题) 80MHz-100MHz频谱分析仪(E题) 数字频率计(F题) 短距视频信号无线通信网络(G题) 第一届(1994年) 第一届(1994年)全国大学生电子设计竞赛 A.简易数控直流电源 B.多路数据采集系统 第二届(1995年) 第二届(1995年)全国大学生电子设计竞赛 A.实用低频功率放大器 B.实用信号源的设计和制作 C.简易无线电遥控系统 D.简易电阻、电容和电感测试仪 第三届(1997年) 第三届(1997年)全国大学生电子设计竞赛A.直流稳定电源
B.简易数字频率计 C.水温控制系统 D.调幅广播收音机 第四届(1999年) 第四届(1999年)全国大学生电子设计竞赛 A.测量放大器 B.数字式工频有效值多用表 C.频率特性测试仪 D.短波调频接收机 E.数字化语音存储与回放系统 第五届(2001年) 第五届(2001年)全国大学生电子设计竞赛 A.波形发生器 B.简易数字存储示波器 C.自动往返电动小汽车 D.高效率音频功率放大器 E.数据采集与传输系统 F.调频收音机 第六届(2003年) 第六届(2003年)全国大学生电子设计竞赛 A.电压控制LC振荡器 B.宽带放大器
C.低频数字式相位测量仪 D.简易逻辑分析仪 E.简易智能电动车 F.液体点滴速度监控装置 第七届(2005年) 第七届(2005年)全国大学生电子设计竞赛 A.正弦信号发生器 B.集成运放测试仪 C.简易频谱分析仪 D.单工无线呼叫系统 E.悬挂运动控制系统 F.数控恒流源 G.三相正弦波变频电源 第八届(2007年) 第八届(2007年)全国大学生电子设计竞赛 A.音频信号分析仪 B.无线识别 C.数字示波器 D.程控滤波器 E.开关稳压电源 F.电动车跷跷板 G.积分式直流数字电压表
电子设计大赛控制类题目汇总
全国大学生电子设计竞赛历年题目(1994-2011) 第一届(1994年)全国大学生电子设计竞赛题目题目三简易无线电遥控系统 一、任务 设计并制作无线电遥控发射机和接收机。 1.无线电遥控发射机 2.无线电遥控接收机 二、要求 1.基本要求 (1)工作频率:fo=6~10MHz中任选一种频率。 (2)调制方式:AM、FM或FSK……任选一种。 (3)输出功率:不大于20mW(在标准75Ω假负载上)。 (4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作。 (5)接收机距离发射机不小于10m。
2.发挥部分 (1)8路设备中的一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数。 (2)在一定发射功率下(不大于20mW),尽量增大接收距离。 (3)增加信道抗干扰措施。 (4)尽量降低电源功耗。 注:不能采用现成的收、发信机整机。 三、评分意见 电子设计大赛控制类题目汇总 ·控制类的题目均要注意外界的干扰。要采取一定的屏蔽措施。 ·涉及到电机时要考虑控制部分和电机部分,分开供电。双电源供电。将电动机驱动电源与单片机以及其周边电路完全隔离,利用光电耦合传输信号。这样做虽然不如单电源方便灵活,但可以将电动机所造成的干扰彻底消除,提高了系统稳定性。 ·掌握各种算法。 第三届(1997年) C题水温控制系统 一、任务 设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。 二、要求
1.基本要求 (1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。 (2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。 (3)用十进制数码管显示水的实际温度。 2.发挥部分 (1)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。 (2)温度控制的静态误差≤0.2℃。 (3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。 三、评分意见 四、说明 (1)加热器用1千瓦电炉。 (2)如果采用单片机控制,允许使用已右的单片机最小系统电路板 (3)数码显示部分可以便用数码显示模块。 (4)测量水温时只要求在容器内任意设置一个测量点。 (5)在设计报告前附一篇400字以内的报告摘要。 赛题分析: 一、赛题要点: 水温的范围水温调节的误差水温变化的速度打印水温变化的曲线 二、参考设计方案 1、水温的测量。温度传感器(参考型号AD590K)
集成运放参数测试仪(B题)
集成运放参数测试仪(B题) 一、任务 设计并制作一台能测试通用型集成运算放大器参数的测试仪,示意图如图1所示。 图1 二、要求 1、基本要求 (1)能测试V IO(输入失调电压)、I IO(输入失调电流)、A VD (交流差模开环电压增益)和K CMR (交流共模抑制比)四项基本参数,显示器最大显示数为3999; (2)各项被测参数的测量范围及精度如下(被测运放的工作电压为±15V): V IO:测量范围为0~40mV(量程为4mV和40mV),误差绝对值小于3%读数+1个字; I IO:测量范围为0~4μA(量程为0.4μA和4μA),误差绝对值小于3%读数+1个 字; A VD:测量范围为60dB~120dB,测试误差绝对值小于3dB; K CMR:测量范围为60dB~120dB,测试误差绝对值小于3dB; (3)测试仪中的信号源(自制)用于A VD、K CMR参数的测量,要求信号源能输出频率为5Hz、输出电压有效值为4 V的正弦波信号,频率与电压值误差绝对值均小于1%; (4)按照本题附录提供的符合GB3442-82的测试原理图(见图2~图4),再制作一组符合该标准的测试V IO、I IO、A VD和K CMR参数的测试电路,以此测试电路的测试结果作 为测试标准,对制作的运放参数测试仪进行标定。 2、发挥部分 (1)增加电压模运放BW G (单位增益带宽)参数测量功能,要求测量频率范围为100kHz~3.5MHz,测量时间≤10秒,频率分辨力为1kHz; 为此设计并制作一个扫频信号源,要求输出频率范围为40kHz~4MHz,频率误差绝对值小于1%;输出电压的有效值为2V±0.2 V; (2)增加自动测量(含自动量程转换)功能。该功能启动后,能自动按V IO、I IO、A VD、K CMR 和BW G的顺序测量、显示并打印以上5个参数测量结果; (3)其他。
运放的主要参数
集成运放的参数较多,其中主要参数分为直流指标和交流指标。其中主要直流指标有输入失调电压、输入失调电压的温度漂移(简称输入失调电压温漂)、输入偏臵电流、输入失调电流、输入偏臵电流的温度漂移(简称输入失调电流温漂)、差模开环直流电压增益、共模抑制比、电源电压抑制比、输出峰最大差模输入电压。 主要交流指标有开环带宽、单位增益带宽、转换速率宽、建立时间、等效输入噪声电压、差模输入阻抗、共模输入阻抗、输出阻抗。 1、输入失调电压VIO(Input Offset Voltage)输入失调电压定义为集成运放输出端电压为零时,两个输入端之间所加的补偿电压。 输入失调电压实际上反映了运放内部的电路对称性,对称性越好,输入失调电压越小。输入失调电压是运放的一个十分重要的指标,特别是精密运放或是用于直流放大时。输入失调电压与制造工艺有一定关系,其中双极型工艺(即上述的标准硅工艺)的输入失调电压在±1~10mV之间;采用场效应管做输入级的,输入失调电压会更大一些。对于精密运放,输入失调电压一般在1mV以下。输入失调电压越小,直流放大时中间零点偏移越小,越容易处理。所以对于精密运放是一个极为重要的指标。 2、输入失调电压的温漂αVIO(Input Offset Voltage Drift) 输入失调电压的温度漂移(又叫温度系数)定义为在给定的温度范围内,输入失调电压的变化与温度变化的比值。这个参数实际是输入失调电压的补充,便于计算在给定的工作范围内,放大电路由于温度变化造成的漂移大小。一般运放的输入失调电压温漂在±10~20μV/℃之间,精密运放的输入失调电压温漂小于±1μV/℃。 3、输入偏臵电流IB(Input Bias Current) 输入偏臵电流定义为当运放的输出直流电压为零时,其两输入端的偏臵电流平均值。输入偏臵电流对进行高阻信号放大、积分电路等对输入阻抗有要求的地方有较大的影响。输入偏臵电流与制造工艺有一定关系,其中双极型工艺(即上述的标准硅工艺)的输入偏臵电流在±10nA~1μA之间;采用场效应管做输入级的,输入偏臵电流一般低于1nA。对于双极性运放,该值离散性很大,但几乎不受温度影响;而对于MOS型运放,该值是栅极漏电流,值很小,但受温度影响较大。 4、输入失调电流(Input Offset Current)输入失调电流定义为当运放的输出直流电压为零时,其两输入端偏臵电流的差值。输入失调电流同样反映了运放内部的电路对称性,对称性越好,输入失调电流越小。输入失调电流是运放的一个十分重要的指标,特别是精密运放或是用于直流放大时。输入失调电流大约是输入偏臵电流的百分之一到十分之一。输入失调电流对于小信号精密放大或是直流放大有重要影响,特别是运放外部采用较大的电阻(例如10k或更大时),输入失调电流对精度的影响可能超过输入失调电压对精度的影响。输入失调电流越小,直流放大时中间零点偏移越小,越容易处理。所以对于精密运放是一个极为重要的指标。 5、输入阻抗 (1)差模输入阻抗差模输入阻抗定义为,运放工作在线性区时,两输入端的电压变化量与对应的输入端电流变化量的比值。差模输入阻抗包括输入电阻和输入电容,在低频时仅指输入电阻。 (2)共模输入阻抗共模输入阻抗定义为,运放工作在输入信号时(即运放两输入端输入同一个信号),共模输入电压的变化量与对应的输入电流变化量之比。在低频情况下,它表现为共模电阻。 6、电压增益 (1)开环电压增益(Open-Loop Gain)在不具负反馈情况下(开环路状况下),运算放大器的放大倍数称为开环增益,记作AVOL,有的datasheet上写成:Large Signal Voltage Gain。AVOL 的理想值为无限大,一般约为数千倍至数万倍,其表示法有使用dB及V/mV等。 (2)闭环电压增益(Closed-Loop Gain顾名思义,就是在有反馈的情况下,运算放大器的放大倍数、
TI杯大学生电子设计竞赛题目
2016年T I杯大学生电子设计竞赛 A题:降压型直流开关稳压电源 1.任务 以TI公司的降压控制器LM5117芯片和CSD18532KCSMOS场效应管为核心器件,设计并制作一个降压型直流开关稳压电源。额定输入直流电压为时,额定输出直流电压为,输出电流最大值为。测试电路可参考图1。 图1电源测试连接图 2.要求 (1)额定输入电压下,输出电压偏差:;(10分) (2)额定输入电压下,最大输出电流:;(10分) (3)输出噪声纹波电压峰峰值:;(10分) (4)从满载变到轻载时,负载调整率: ;(10分) (5)变化到17.6V和13.6V,电压调整率: (10分)(6)效率;(15分) (7)具有过流保护功能,动作电流;(10分) (8)电源具有负载识别功能。增加1个2端子端口,端口可外接电阻R(1kΩ-10kΩ)作为负载识别端口,参考图1。电源根据通过测量端口识别电阻R的阻值,确定输出电压,;(10分) (9)尽量减轻电源重量,使电源不含负载的重量。(15分)
(10)设计报告(20分) 3.说明 (1)该开关稳压电源不得采用成品模块制作。 (2)稳压电源若含其它控制、测量电路都只能由端口供电,不得增加其他辅助电源。(3)要求电源输出电压精确稳定,或,作品不参与测试。 2016年TI杯大学生电子设计竞赛题 B题:物品分拣搬送装置 1.任务 在一个以木条(截面不大于3cm×4cm,木质本色)围成的100cm×150cm的A区域内,散落着边长均为4cm的正方体。设计一自动物体搬运系统,能够快速将这些正方体移至指定区域。A区域的颜色为白色,B区域为黑色,C区域为红色。 2.要求 (1)在A区域内任意放置了12只黑色正方体,以最快的速度将这些正方体移送到B区域,完成时间不得超过180秒;(24分) (2)将A区域的12只黑色正方体以最快的速度移送到红色C区域;完成时间不得超过180秒;(26分) (3)A区域12只正方体中有桔黄色与黑色两种颜色,以最快的速度将桔黄色正方
电子设计大赛我们该做什么
全国大学生电子设计大赛应该怎么准备? 最主要的是学习什么课程::《电工电路基础》《低频电子线路》《数字电路》《高频电子线路》《电子测量》《智能仪器原理及应用》《传感器技术》《电机与电气控制》《信号与系统》《单片机接口原理及应用》等等。所要学习的科目当然不能定局,知识面越广越好,它是对各个科目综合运用的产物,而且要具有非常强的动手和创新能力,对一个人的动手能力有很大的促进作用.学起来不要急于求成,掌握一些基本电路及调试,焊接技术,Protel软件的使用,能制作机器人最好对机械结构方面也要懂些。很多东西只要学习了不一定什么时候就能用到,不要在学时表面感觉没用就不注重它,那样就犯了很大的错误了。在电子DIY学习过程中你会体会到很多乐趣的。要厚积勃发。 全国大学生电子设计大赛应该准备哪些模块? 主要可以针对以下几类准备模块:电源类、信号源类、无线电类、放大器类、仪器仪表类、控制类。 建议现在打好基础,做好知识储备: 1.数电,模电,单片机原理,C语言,这几个是必学的,重要,相当重要。 2.收集相关资料,比如芯片数据手册,应用笔记,源程序,制作实例,现在吧资料积累好了,到时候用起来很方便。
3.多跑电子市场,买些元件回来自己动手做一些东西,锻炼实践能力。4.看往年电子设计大赛的题目,学习别人设计的长处,最好自己总结下,写成自己的东西。 5.找你们学校以前带电子设计竞赛的老师,告诉他你自己的想法,希望他能给你点建议或者帮助。?6.坚持,坚持,再坚持,克服困难,持之以恒!?这些最基本的东西学好了,等你正式参加比赛的时候,什么ARM,DSP,FPGA等用起来也就不是很困难了!切记,不要赶时髦,追新潮,最基本的东西全掌握了,新东西也不就那么神秘了!! 课程方面: ?还要学单片机啊、嵌入式系统、数字电路、CPLD/FPGA设计、C语言、汇编、微机接口 模电要好好学,信号没多大用?CPLD/FPGA编程/模拟用QuartusII ?单片机模拟用Proteus ?模电模拟用Multisim 单片机编程用Keil,用的C语言和汇编?嵌入式还要用到Linux 的内核 还有个画PCB板的,Protel 99SE,现在最新的叫“Altium D esigner” ?反正这些东西都会要用的,要学起来东西很多,建议你要用到什么看书吧~而且电子设计竞赛都是几个人一组,分工合作吧~ 在此留贴激励自己备战两年后的全国大学生电子设计大赛。在这两年完成自己技能的升级,能力的质变: 1.熟练PCB Layer Out规则(EDA工具Protel99SE,OR CAD)
电子设计大赛心得
电子设计大赛心得 XX年的全国大学生电子设计大赛终于落下帷幕,真的很庆幸自己得以参加这样的比赛。虽然最后失手的结果让人感到无比遗憾,但正如老师所说的,此前长达一年的技能学习对知识,心态的锻炼才是我们最大的收获,我会朝着自己所爱坚定地走下去。 一年的技能特训以来,尤其这个暑假里,在实验里的一幕幕依然仿佛在眼前,这将是令人难忘的,令人永远怀念的一段时光,因为在这段日子里,我们不懈地努力,全身心地投入。一个闷热,单调的夏天,却是充满回忆,收益匪浅的收获的季节。 时间过得好快,依然很怀念曾经一起努力的日子。和师兄姐,姐弟们的相互调侃,请教师兄,听老师说教,一起讨论算法,叫外卖一块吃,通宵攻关,小组篮球赛,一起焊电路,近乎争吵的讨论,为找器件走遍整个实验室,被师兄笑菜鸟,卷在台下跟电脑主机睡……这一幕幕仿佛在昨天。 一路走过来,从只知道些课本的理论知识之外一无所知的菜鸟开始,上培训课,请教老师、师兄,上网查资料,自己动手实践、摸索,到激动地喊出“我搞出来啦!”这是一个美妙的过程。在三人小组里,我的角色是负责软件的编写,在刚开始时遇到很大困难,特别是串口的初始化、中断的设置和文件配置上有很多不明白的地方,但在两位指导老师还有师兄的帮助下,查参考资料,自己尝试,甚至巩老师手把手的调教下,一点点地深入了解了其工作原理。我真诚地感激帮助我的老师和师兄们,在认真观察了他们的编写、调试程序和探寻答案的过程后,我真正感叹自己确是菜鸟一个,我简直难以抑制自己的兴奋—--这些经验我像是在信手拈来!在硬件方面,我常常参予到硬件的选择和焊接中去,和队友一起沟通讨论其工作原理以便编写程序,遇到问题时同队友们由软硬件两个方向推敲,从而找到问题所在。我愰然发觉,一些在课本上看起来很容易的内容其实一点不简单,同样地,一些很难的理论知识应用起来其实也不是那么难。
集成运放的主要参数以及测试方法
集成运放的性能主要参数及国标测试方法 集成运放的性能可用一些参数来表示。 集成运放的主要参数: 1.开环特性参数 (1)开环电压放大倍数Ao。在没有外接反馈电路、输出端开路、在输入端加一个低频小信号电压时,所测出输出电压复振幅与差动输入电压复振幅之比值,称为开环电压放大倍数。Ao越高越稳定,所构成运算放大电路的运算精度也越高。 (2)差分输入电阻Ri。差分输入电阻Ri是运算放大器的主要技术指标之一。它是指:开环运算放大器在室温下,加在它两个输入端之间的差模输入电压变化量△V i与由它所引起的差模输入电流变化量△I i之比。一般为10k~3M,高的可达1000M以上。在大多数情况下,总希望集成运放的开环输入电阻大一些好。 (3)输出电阻Ro。在没有外加反馈的情况下,集成运放在室温下其输出电压变化与输出电流变化之比。它实际上就是开环状态下集成运放输出级的输出电阻,其大小反映了放大器带负载的能力,Ro通常越小越好,典型值一般在几十到几百欧。 (4)共模输入电阻Ric。开环状态下,两差分输入端分别对地端呈现的等效电阻,称为共模输入电阻。 (5)开环频率特性。开环频率特性是指:在开环状态下,输出电压下降3dB所对应的通频带宽,也称为开环-3dB带宽。 2.输入失调特性 由于运算放大器输入回路的不对称性,将产生一定的输入误差信号,从而限制里运算放大器的信号灵敏度。通常用以下参数表示。 (1)输入失调电压Vos。在室温及标称电源电压下,当输入电压为零时,集成运放的输出电位Vo0折合到输入端的数值,即: Vos=Vo0/Ao 失调电压的大小反映了差动输入级元件的失配程度。当集成运放的输入端外接电阻比较小时。失调电压及其漂移是引起运算误差的主要原因之一。Vos一般在mV级,显然它越小越好。 (2)输入失调电流Ios。在常温下,当输入信号为零时,放大器两个输入端的基极偏置电流之差称为输入失调电流。即: Ios=Ib- — Ib+ 式中Ib-、Ib+为放大器内两个输入端晶体管的基极电流。Ios一般在零点几微安到零点零几微安数量级,其值越小越好。失调电流的大小反映了差动输入级两个晶体管B值的失配程度,当集成运放的输入端外接电阻比较大时,失调电流及其漂移将是运算误差的主要原因。 (3)输入失调电流温漂dIos。温度波动对运算放大器的参数是有影响的。如温度变化时,不仅能使集成运放两输入晶体管的基极偏置电流Ib-、Ib+发生变化,而且两者的变化率也不相同。也就是输入失调电流Ios将随温度而变化,不能保持为常数。一般常用的集成运放的dIos指标如下: ●通用I型低增益运放。在+25℃~+85℃范围约为5~20nA/℃,-40℃~+25℃范围约为 20~50nA/℃。 ●通用Ⅱ型中增益运放。dIos约为5~20nA/℃。 ●低漂移运放。dIos约为100PA/℃ (4)输入失调电压温漂dVos。在规定的工作温度范围内,Vos随温度的平均变化率,
2017年全国大学生电子设计竞赛
2017年全国大学生电子设计竞赛 管道内钢珠运动测量装置(M题) 【高职高专】
摘要: 系统以STC15W4K61S4单片机为主控器,设计一款管道内钢珠运动测量装置。该装置可以获取管道内钢珠滚动的方向,以及倒入管道内钢珠的个数和管道的倾斜角度。并通过LCD12864液晶显示屏实时显示钢珠滚动方向、个数以及管道的倾斜角度。系统包括单片机主控模块、角度信号采集模块、磁力传感器模块、显
示模块、电源模块、采用稳压输出电源为系统提供工作电源。系统制作成本较低、工作性能稳定,能很好达到设计要求。 关键词:角度传感器、磁性接近开关、LCD12864 目录 1设计任务与要求 (1) 1.1设计任务 (1) 1.2技术指标 (1) 1.3题目评析 (1)
2方案比较与选择 (2) 2.1单片机选择 (2) 2.2角度测量选择 (2) 2.3 钢珠运动检测选择 (2) 2.4显示选择 (2) 2.5电源选择 (2) 3电路系统与程序结构设计 (3) 3.1系统硬件总体设计 (3) 3.2单片机最小系统模块设计 (3) 3.3角度传感器模块设计 (3) 3.4 磁性传感器模块设计 (4) 3.5显示模块设计 (4) 3.6电源模块设计 (4) 3.7程序结构与设计 (5) 4系统测试 (5) 5总结 (6) 参考文献及附录 (6)
1设计任务与要求 1.1设计任务 设计并制作一个管道内钢珠运动测量装置,钢珠运动部分的结构如图1.1所示。 1.2技术指标 1.基本要求 规定传感器宽度 w≤20mm,传感器1和2之间的距离l 任意选择。 (1)按照图1.1所示放置管道,由A 端放入2~10粒钢珠,每粒钢珠放入的时 间间隔≤2s,要求装置能够显示放入钢珠的个数。 (2)分别将管道放置为A 端高于B 端或B 端高于A 端,从高端放入1粒钢 珠,要求能够显示钢珠的运动方向。 (3)按照图1.1所示放置管道,倾斜角ɑ为10o~80o之间的某一角度,由A 端放入1粒钢珠,要求装置能够显示倾斜角ɑ的角度值,测量误差的绝对≤3o。 2.发挥部分 设定传感器1和2之间的距离l 为20mm ,传感器1和2在管道外表面上安放的位置不限。 (1)将1粒钢珠放入管道内,堵住两端的管口,摆动管道,摆动周期≤1s , 摆动方式如图1.2所示,要求能够显示管道摆动的周期个数。 (2)按照图1.1所示放置管道,由A 端一次连续倒入2~10粒钢珠,要求装置 能够显示倒入钢珠的个数。 (4)其他。 3.设计报告。 1.3题目评析 根据设计要求,对题目评析如下: 本题的重点: ① 传感器灵敏度的选择。 ② 用于钢珠运动检测的传感器选择 图1.1:管道内钢珠运动测量装置的结构图 图1.2:管道摆动方式
历年电子设计大赛控制类题目汇总
1.历届的控制类赛题” 1.历届的“控制类赛题” 在9届电子设计竞赛中,“控制类赛题” 除了1994和1995年外,其它每届都有,共有9题:①水温控制系统(1997年C 题);②自动往返电动小汽车(2001年C 题); ③简易智能电动车(2003年 E 题);④液体点滴速度监控装置(2003年 F 题);⑤悬挂运动控制系统(2005年 E 题);⑥电动车跷跷板(2007年F 题本科组);⑦电动车跷跷板(2007年J 题高职高专组); ⑧声音引导系统(2009年 B 题);⑨模拟路灯控制系统(2009年I 题)。 2. 从历届赛题可以看到:从历届的赛题来看,主攻“控制类”赛题方向的同学需要了解和掌握:(1)系统控制方案和算法设计( 2 )微控制器电路模块制作和编程:如:AT89S52 、MSP430F1611 、MSP430F2274、Atmega128、PIC16F628A、ADuC841、C8051F022、W78E51B 、STM32F103VET6等等。(3)微控制器外围电路模块制作和编程:如键盘及LED 数码管显示器模块、RS-485总线通信模块、CAN 总线通信模块、无线收发器电路模块、ADC 模块、DAC 模块等等。(4)传感器电路模块制作和编程:如光电传感器模块、超声波发射与接收模块、温湿度传感器模块、倾角传感器模块、角度传感器模块、音频信号检测模块等等。(5)电机控制电路模块制作和编程:如直流电机驱动模块(L298 N)步、进电机驱动模块(L297+L298N,TA8435H)、舵机控制模块、光电隔离模块等等。(6)放大器电路模块制作:小信号放大器电路模块、滤波器电路模块、音频放大器(7)电源电路模块制作(8)电动小车制作 建议:3. 建议:“控制类”赛题中所涉及到的一些知识点,特别是有关
全国大学生电子设计大赛作品报告
全国大学生电子设计大 赛作品报告 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
2015年全国大学生电子设计竞赛 多旋翼自主飞行器(c题) 2015 年8月15 日 摘要 旋多翼自主飞行器由RL78/G13MCU板(芯片型号R5F100 LEA),STM32单片机模块(加SD卡),CMOS摄像头,A2212/13T新西达电机。STM32单片机输入信号到RL78/G13MCU板,启动飞行器和CMOS摄像模块,RL78/G13MCU飞控模块矫正飞行器在空中的姿态,实现悬停,前进,后退等功能,CMOS模块将拍摄的视频内容存储在STM32模块内置的SD卡里。当飞行到目的地时各模块自动停止工作。 飞行器能一键式启动,并开始航拍,从A点起飞,飞向B区,在B区降落,但不是中心,当飞行结束后,拔掉SD卡,能顺利的通过P0机回放,在飞行过程中,始终在电子示高线H1和H2的区间内。 目录 目录
1. 方案论证与比较 四旋翼算法方案 方案一:采用欧拉角法欧拉角法静止状态,或者总加速度只是稍微大于g 时,由加计算出的值比较准确。 使用欧拉角表示姿态,令Φ,θ和Φ代表ZYX 欧拉角,分别称为偏航角、俯仰角和横滚角 。 载体坐标系下的 加 速 度(axB,ayB,azB)和参考坐标系下的加速度(axN, ayN, azN)之间的关系可表示为(1)。其中 c 和 s 分别代表 cos 和 sin 。axB,ayB,azB 就是mpu 读出来的三个值。 这个矩阵就是三个旋转矩阵相乘得到的,因为矩阵的乘法可以表示旋转。 axB c c c s s axN ayB c s s s c c c s s s s c ayN azB s s c s c s c c s s c c azN θψθψθφψφθψφψφθψφθφψφθψφψφθψφθ-??? ?????????=-++????????????+-+?????? (1) 飞行器处于静止状态,此时参考系下的加速度等于重力加速度,即 00xN yN zN a a g a ????????=???????????? (2) 把(2)代入(1)可以解 : arctg θ= (3) yB zB a arctg a φ??= ? ?? (4) 即为初始俯仰角和横滚角,通过加速度计得到载体坐标系下的加速度即可将其解出,偏航角可以通过电子罗盘求出。 方案二:四元数法(通过处理单位采样时间内的角增量(mpu 的陀螺仪得到的就是角增量),为了避免噪声的微分放大,应该直接用角增量-------抄的书) 本项目采用的是方案一。 STM32控制方案 方案一: 直接激活飞控模块(RL78/G13MCU ),可以很好的与飞控进行协调,实现飞控模块的启动与停止。 方案二:使用STM32直接控制飞行器飞行。在植入的程序里包含对四旋翼的控制算法和自启动和自停止,还有视频模块的处理,但太过复杂。