【CN109917540A】多光谱5D光度立体视觉的超高清电子内窥镜系统【专利】
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910273432.2
(22)申请日 2019.04.05
(71)申请人 舒轶
地址 200240 上海市闵行区东川路800号
(72)发明人 舒轶 安向昕 陈斌豪
(51)Int.Cl.
G02B 23/24(2006.01)
G01B 11/24(2006.01)
(54)发明名称多光谱5D光度立体视觉的超高清电子内窥镜系统(57)摘要一种图像检测领域的基于多光谱5D光度立体视觉的超高清电子内窥镜系统,包括内窥镜前端龙骨、LED控制接口、USB数据接口、手持方向控制端、内窥镜镜头、红色LED灯、绿色LED灯、蓝色LED灯、白色LED灯,内窥镜前端龙骨的前端布置PCB板,内窥镜镜头放置在PCB板的中间孔,六个LED灯分别以红、白、绿、白、蓝、白的顺序顺时针排列在PCB板上。本发明采用国内独创的5D(三维+实时动态+多光谱)光度立体视觉技术,获取不同光照方向及色彩通道下的对应图片,通过算法复现像素记录值与物体表面法向量之间的关系,恢复各通道法向量场,在此基础上重构观测对象表面法向量,实现微米级精细度的全三维形貌重构与评定,
从而实现超高清晰度的内部检测。权利要求书1页 说明书3页 附图2页CN 109917540 A 2019.06.21
C N 109917540
A
权 利 要 求 书1/1页CN 109917540 A
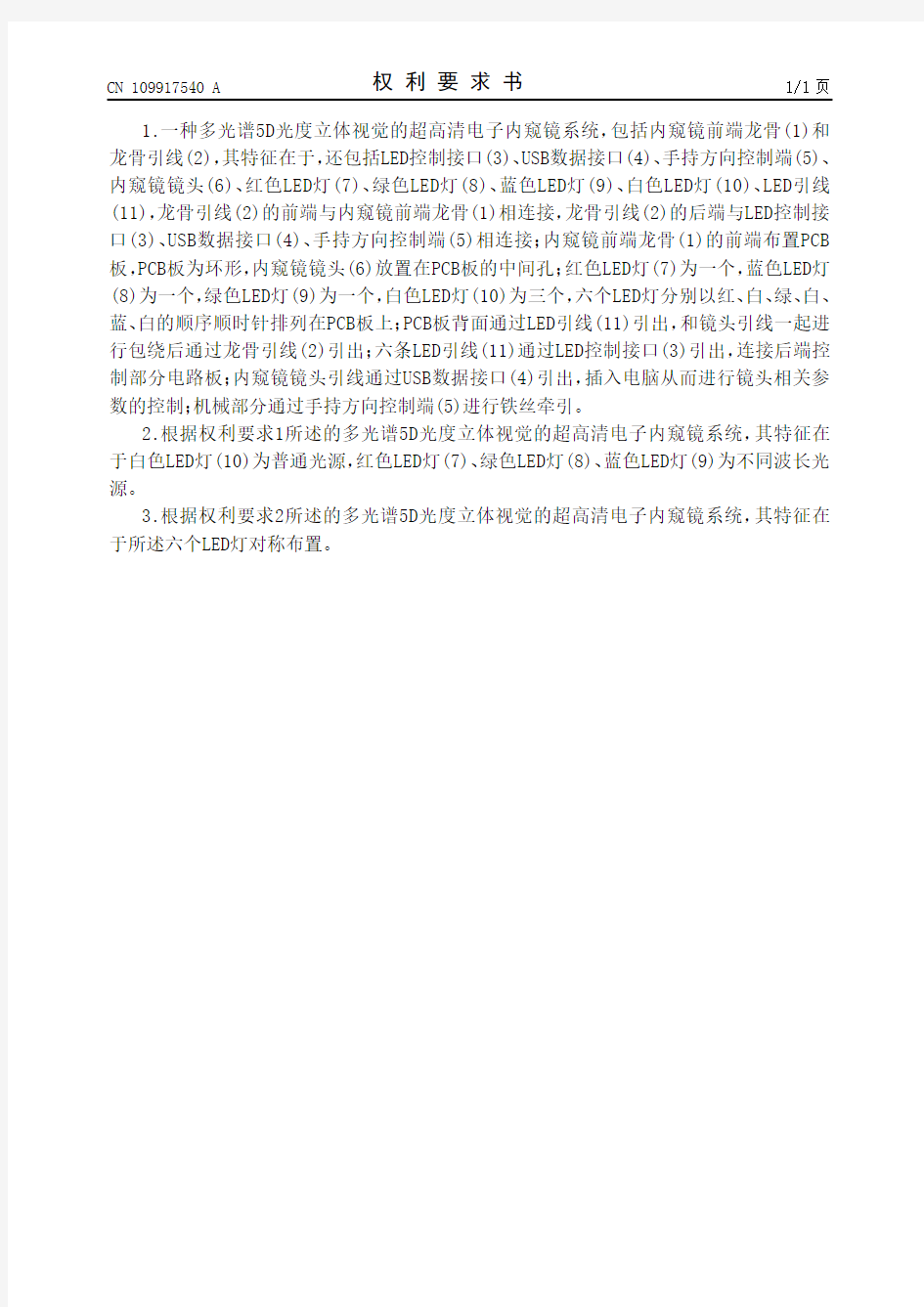
1.一种多光谱5D光度立体视觉的超高清电子内窥镜系统,包括内窥镜前端龙骨(1)和龙骨引线(2),其特征在于,还包括LED控制接口(3)、USB数据接口(4)、手持方向控制端(5)、内窥镜镜头(6)、红色LED灯(7)、绿色LED灯(8)、蓝色LED灯(9)、白色LED灯(10)、LED引线(11),龙骨引线(2)的前端与内窥镜前端龙骨(1)相连接,龙骨引线(2)的后端与LED控制接口(3)、USB数据接口(4)、手持方向控制端(5)相连接;内窥镜前端龙骨(1)的前端布置PCB 板,PCB板为环形,内窥镜镜头(6)放置在PCB板的中间孔;红色LED灯(7)为一个,蓝色LED灯(8)为一个,绿色LED灯(9)为一个,白色LED灯(10)为三个,六个LED灯分别以红、白、绿、白、蓝、白的顺序顺时针排列在PCB板上;PCB板背面通过LED引线(11)引出,和镜头引线一起进行包绕后通过龙骨引线(2)引出;六条LED引线(11)通过LED控制接口(3)引出,连接后端控制部分电路板;内窥镜镜头引线通过USB数据接口(4)引出,插入电脑从而进行镜头相关参数的控制;机械部分通过手持方向控制端(5)进行铁丝牵引。
2.根据权利要求1所述的多光谱5D光度立体视觉的超高清电子内窥镜系统,其特征在于白色LED灯(10)为普通光源,红色LED灯(7)、绿色LED灯(8)、蓝色LED灯(9)为不同波长光源。
3.根据权利要求2所述的多光谱5D光度立体视觉的超高清电子内窥镜系统,其特征在于所述六个LED灯对称布置。
2
内窥镜系统设计
门禁语言识别及视频监控系统硬件方案设计 姓名:欧志彬学号:4121161016 在医学领域,内窥镜是用于人体内部器官检查的主要设备之一。为实现人体内部器官的检测,内窥镜需要满足如下要求: 第一、能够获取内部器官的形态信息; 第二、能够将获取的信息传到体外,以实现医生的感知; 第三、能够将获取的信息转换为图像信号,并通过一定的设备显示出来; 第四、能够保存数据,实现群体信息的获取和识别,从而通过一定的方案报告病变情况。 针对以上需求,设计门禁的系统如下: 一、总体设计 内窥镜应该包括五个子系统,信息获取系统用于获取内部器官的图像信息;信息处理系统用于将获取的图像信息进行编码处理并转换为光线获电缆可传输的信息;信息传输系统用于将处理后的信息传输到体外;信息显示系统用于直观显示获取的内部图像情况并报告病变情况;信息存储系统用于将处理后的信息保存起来,以构建数据库。这五个子系统组成的内窥镜系统的框图如图1所示: 图1.内窥镜总体设计框图 二、子系统设计 在内窥镜系统中,主要需要获取的信息是图像信息,可通过一般的CCD进行图像获取。CCD是一种半导体器件,能够把光学影像转化为数字信号。CCD 上植入的微小光敏物质称作像素(Pixel)。一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。CCD的作用就像胶片一样,但它是把光信号转换成电荷信号。CCD上有许多排列整齐的光电二极管,能感应光线,并将光信号转变成电信号,经外部采样放大及模数转换电路转换成数字图像信号[1]。 CCD获取的信号最终以电信号输出,而通常用的光纤传输的信号的光信号,所以从CCD传来的信号还需要一个电光转换器件来处理信息,可通过发光二极管等器件来实现,并将信息输入光纤内部。发光二极管是是半导体二极管的一种,可以把电能转化成光能。发光二极管与普通二极管一样是由一个PN结组成,也具有单向导电性。当给发光二极管加上正向电压后,从P区注入到N区的空穴和由N区注入到P区的电子,在PN结附近数微米内分别与N区的电子和P区的空穴复合,产生自发辐射的荧光[2]。信息传输系统主要是光纤。
电子内窥镜的使用和维护_陈基明
2010年第25卷 05期 V OL.25 No.05 97 设备运行与保障 OPERATION & GUARANTEE FOR INSTRUMENTS 1 概述 医用电子内窥镜是一种可插入人体体腔和脏器内腔进行直接观察、诊断、治疗的集光、机、电等高精尖技术于一体的医用电子光学仪器。医用电子内窥镜是传统内窥镜技术与现代计算机技术、微电子技术等高新技术的不断发展和融合的产物[1]。通过它能直接观察人体内脏器官的组织形态,可提高诊断的准确性。结合医用内窥镜实施的内外科诊疗技术的诸多优点已为医学界所共识[2]。电子内窥镜是继第一代硬式胃镜和第二代光导纤维内镜之后的第三代内窥镜。1983年,美国WelchAllyn 公司研制成功了电子内窥镜,使内窥镜技术跨入电子时代。所谓电子内窥镜是由导光玻璃纤维束传导冷光照明及由导像纤维束或CCD 传导图像,并由金属网管制成插入管,镜身在各种弯曲状态下都能清晰地观察到人体内腔隙管道的一种集光学、机械、电子的装置[3] 。与CT、B 超图像成像原理不同,电子内窥镜不是通过光学镜头或光导纤维传导图像,而是利用视频处理器内装备的光源发出的光经光导纤维导入受检体腔内,由装配在电子内窥镜先端部的图像传感器CCD(charge coupled device)接收体腔内的反射光,并将光转换成电信号,再通过导线将信号输送到视频处理器,视频处理器将这些电信号经过贮存和处理,最后传输到监视器屏幕上显示出受检脏器的高清晰度的、色彩逼真的图像[4] ,用于观察和诊断,且可供多人同时观看,有利于教学和会诊,也有利于助手与手术者的紧密配合。在给病人检查的过程中,电子内窥镜承担着图像的采集与处理的功能。电子内窥镜在国内大中型医院内镜室的诊断和治疗活动中起着十分重要的作用。整套电子内窥镜包括: 电子内镜、冷光源、视频处理器、显示器和推车等组成[5] 。 医用电子内窥镜按技术特性分为:纤维、电子;按用途分为:医学镜——人体,工业镜——机器;按外部特性分为:GIF(胃)、CF(结肠)、JF(十二指肠)、 SIF(小肠)、ENF(鼻咽喉)、CHF(胆道)等;根据视角分为:直视型,侧视型。 2 常见故障现象及使用维护 2.1 漏水 内镜的检查和治疗过程都是在液体环境下进行的,因此,整个镜体的密封性就显得尤为重要。常见的导致镜体失去密封性的部位是弯曲橡皮和钳道管[6]。内镜漏水严重的会导致电子镜图像出现不良现象甚至引起电路板短路烧坏CCD,它是电子内镜的“心脏”部分,维修成本很高;还可能会引起纤维镜像束出现龟裂或彩虹现象,视野模糊;光束变硬变脆,容易折断,亮度减弱;螺旋管脱落,打角度镜身蛇形;电子镜开关按键短路,不能使用其功能等故障。 常见的有:① 弯曲橡皮漏水。使用质量差的口垫;患者咬住插入部使弯曲橡皮破裂;弯曲橡皮老化引起弯曲橡皮破损;内镜与尖锐附件一起清洗划破弯曲橡皮;钢网破裂扎坏橡皮都会引起弯曲橡皮漏水。② 钳子管道漏水。这主要是医生使用不当引起的。如使用不合适的治疗附件使得钳子管道破裂;使用治疗附件不正确引起钳子管道被插破;插入时遇到阻力,强行将治疗附件推进引起钳子管道被插破等等。③ 其它部位漏水。医生和护士在使用或清洁中如先端部不小心与硬物碰撞使镜头破裂;内镜插入部不小心被夹使内镜损坏等引起。 所以操作医生必须要培训上岗,而且操作内镜时要认真仔细;内镜的清洗消毒程序必须正确规范;有专人负责镜子的维护保养,尤其要注意内镜清洗前一定要通过漏水检测以防损坏镜子。 电子内窥镜的使用和维护 Use and Maintenance of Electronic Endoscope [摘 要] 本文介绍了电子内窥镜在临床上的应用情况,以及其使用、维护和保养注意事项,归纳总结了该仪器在使用过程中出现的较常见故障及其解决方法。 [关键词] 电子内窥镜;CCD ;设备维护 [中图分类号] TH776+.1 [文献标志码] B doi:10.3969/j.issn.1674-1633.2010.05.038[文章编号] 1674-1633(2010)05-0097-02 陈基明,张连强,田晓东 空军总医院 医学工程科,北京 100142 CHEN Ji-ming,ZHANG Lian-qiang,TIAN Xiao-dong Medical Engineering Department,General Hospital of Airforce,Beijing 100142,China 收稿日期:2010-02-13 作者邮箱:chen_jiming@https://www.360docs.net/doc/406619824.html,
第九章 明暗分析
第九章 明暗分析 本章将介绍光在物体表面的反射物理特性以及利用反射特性估计表面形状的方法,即光度立体法(Photometric Stereo ).在讨论光度立体法及从明暗恢复形状(Shape from Shading)之前,我们将首先介绍成象物理学,即场景中各点的光强度在图象平面上的映射过程(通常将这一过程称为成像).本章将按照[Horn 1986]所做的开创性工作对有关的理论和算法展开讨论. 9.1 图象辐照度 我们知道,通过投影原理可以确定场景中的点在图象平面中的位置,但并不能确定该点的图象强度.图象强度可用本节将要介绍的成象物理学来确定,其中用于描述图象强度的一个术语是图象辐照度(Irradiance ).由于强度、亮度或灰度等术语使用的十分普遍,因此本书通篇将这些术语视为图象辐照度的同义词. 图象平面中一点的图象辐照度是指图象平面点单位面积接收的辐射(radiance )功率。辐射为输出能量,辐照为输入能量.对图像来说,图像的辐照源对应景物对光源的反射,即场景的辐射。也就是说,图象平面上一点的辐照度),(y x E ''对应于图象点到场景点方向的场景辐射能量),,(z y x L : ),,(),(z y x L y x E ='' (9.1) 场景点),,(z y x 位于从投影中心到图象点),(y x ''的射线上.为了找到图象的辐照源,我们必须沿这条射线返回到发射射线的表面片上,并且弄清楚场景照明光是如何被表面片反射的. 决定场景表面片辐射的因素有两个:一个是投在场景表面片上的照明,另一个是表面片反射的入射照明部分. 投在某一特定表面片上的照明量取决于该表面片在场景中相对于光源的分布位置.在某一特定方向上被表面片反射的入射照明部分取决于表面材料的光学特性. 图9.1在一个无限小的表面片上建立极坐标系,用来描述表面片 可视半球方向的照明和辐射方向 考虑场景中一个无穷小的表面片被一个单独的点光源照明.在表面片上建立一个坐标系,如图9.1所示.此坐标系表示能量可以到达或离开该表面所有可能的方向半球.设),(i i φθ表示在极坐标中相对于表面片的场景照明点光源的方向,设),(e e φθ表示能量从表面片中发射的方向.从某一方向到达该表面片的能量为),(i i E φθ,从表面片向某一方向辐射的能量为
口腔内窥镜系统的设计与实现
第36卷第11期 光电工程V ol.36, No.11 2009年11月Opto-Electronic Engineering Nov, 2009 文章编号:1003-501X(2009)11-0075-04 口腔内窥镜系统的设计与实现 吴頔,张红霞,贾大功,井文才,张以谟 ( 天津大学精密仪器与光电子工程学院, 光电信息技术科学教育部重点实验室(天津大学),天津 300072 ) 摘要:本文设计一种口腔内窥镜,以满足牙科医学应用。整个系统主要由成像系统、照明系统、图像显示及处理系统三个部分组成。系统具有显微放大的功能,并且亮度及色温可调。文中利用光学软件设计、优化了光学成像系统,给出了系统像差曲线,并构造了光学照明系统。论文结尾使用口腔内窥镜对两种牙齿模型进行了测试实验,系统成像分辨力高于100 lp/mm,图像清晰,可以观察到牙齿表面的细节。实验结果表明,系统能够满足牙科医学使用要求。 关键词:口腔内窥镜;光学系统;照明系统;牙齿模型 中图分类号:TH74;R781 文献标志码:A doi:10.3969/j.issn.1003-501X.2009.11.016 Design and Realization of Oral Cavity Endoscope System WU Di,ZHANG Hong-xia,JIA Da-gong,JING Wen-cai,ZHANG Yi-mo ( College of Precision Instrument and Opto-Electronics Engineering, Key Laboratory of Opto-Electronic Science and Technology, Ministry of Education (Tianjin University), Tianjin 300072, China ) Abstract: An oral cavity endoscope was designed to meet the practical needs of dentistry. The whole system was composed of imaging system, illuminating system, image display and processing system. The system has the function of micro-amplification, and the brightness and color temperature is adjustable. In this paper, optics software was used to design and optimize the optics imaging system, and gave out the aberration curve. The illumination system was constructed. In the ending of the papers, the oral cavity endoscope was used to test two teeth model. The system resolution is higher than 100 lp/mm and the image is clear. The details of tooth surface can be observed. The experiment results show that the system could meet the requirements of dental medical application. Key words: oral cavity endoscope; optical system; illumination system; teeth model 0 引言 近年来,口腔内窥镜在口腔临床医学中得到迅速普及与广泛应用[1-3]。它通过将观测探头伸入口腔,在自备光源的照明下,由成像镜头摄取牙齿的细节,成像在COMS或CCD图像传感器上,经过光电转换和图像信号处理后送到显示器上,显示清晰放大的图像供医生观察。目前国内口腔内窥镜多为代理国外公司的产品,自行设计研发的口腔内窥镜产品很少[4]。市场上常见的口腔内窥镜,其成像系统一般是投影成像系统或望远成像系统。相应的照明系统使用贴片封装式的LED,其优点是成本低,结构简单。但是这种口腔内窥镜无法观察牙齿细节,并且不易在色温,亮度,发热等方面进行调节,同时需要复杂时序电路控制。 本文利用显微成像系统原理设计一种口腔内窥镜,目的在于观察人眼不易直接看到的牙齿细节,及时发现病变。文中采用图像传感器配合显微成像镜头和光纤照明系统实现清晰的成像效果,并在牙齿模型上 收稿日期:2009-03-03;收到修改稿日期:2009-06-11 基金项目:国家自然科学基金项目(60577013);教育部新教师博士点基金项目(200800561022);天津市自然科学基金项目(2009F2-0019)作者简介:吴頔(1985-),男(汉族),辽宁盘锦人。硕士研究生,主要从事口腔观测方面研究。E-mail: wd101101@https://www.360docs.net/doc/406619824.html,。
医用内窥镜介绍
医用内窥镜介绍(一) 内窥镜起源于100年前,主要经历了4个发展阶段,每个阶段都以当时所用器械的主要特征为标志。 硬式内镜阶段(1806~1932):硬式内镜由德国人Philipp Bozzini首创,由一花瓶状光源、蜡烛和一系列镜片组成,主要用于膀胱和尿道检查。1895年Rosenhein研制的硬式内镜由3根管子呈同心圆状设置,中心管为光学结构,第二层管腔内装上铂丝圈制的灯泡和水冷结构,外层壁上刻有刻度反应进镜深度。1911年Elsner对Rosenhein式胃窥镜作了改进,在前端加上橡皮头做引导之用,但透镜脏污后便无法观察成为主要缺陷,尽管如此,Elsner式胃镜1932年以前仍处于统帅地位。 半屈式内镜阶段(1932~1957):Schindler从1928年与优秀的器械制作师Georg Wolf 合作研制胃镜,最终在1932年获得成功,定名为Wolf-Schinder式胃镜。之后,许多人对其进行了改造,使之功能更为齐全,更为实用。 光导纤维内镜阶段(1957年至今):1954年,英国的Hopkins和Kapany发明了光导纤维技术。1957年,Hirschowitz及助手在美国胃镜学会上展示了自行研制的光导纤维内镜。60年代初,日本Olympas厂在光导纤维胃镜基础上,加装了活检装置及照相机,有效地显示了胃照相术。1966年Olympas厂首创前端弯角机构,1967年Machida厂采用外部冷光源,使光量度大增,可发现小病灶,视野进一步扩大,可以观察到十二指肠。近10年随着附属装置的不断改进,如手术器械、摄影系统的发展,使纤维内镜不但可用于诊断,且可用于手术治疗。 电视内镜时代(1983年以后):1983年Welch Allyn公司研制成功了电子摄像式内镜。该镜前端装有高敏感度微型摄像机,将所记录下的图像以电讯号方式传至电视信息处理系统,然后把信号转变成为电视显像机上可看到的图像。不久日本Olympas厂即推出相应型号胃镜,并占据大部分市场。 影像质量评价 内窥镜在200年里结构发生了4次大的改进,从最初的硬管式内镜、半曲式内镜到纤维内镜,又到如今的电子内镜。随着科技的进步,影像质量也发生了一次次质的飞跃。最初Bozzine研制的第一台硬管内镜以烛光为光源,后来改为灯泡作光源,而当今从内镜获得的是彩色相片或彩色电视图像。这图像不再是组织器官的普通影像,而是如同在显微镜下观察到的微观像,微小病变清晰可辨,可见其影像质量已达到了较高的水平。 医用内窥镜分类 按其发展及成像构造分类:可大体分为3大类:硬管式内镜、光学纤维(软管式)内镜和电子内镜。 按其功能分类:
主动式光学三维成像技术
万方数据
万方数据
万方数据
万方数据
主动式光学三维成像技术 作者:周海波, 任秋实, 李万荣 作者单位:上海交通大学激光与光子生物医学研究所,上海,200030 刊名: 激光与光电子学进展 英文刊名:LASER & OPTOELECTRONICS PROGRESS 年,卷(期):2004,41(10) 被引用次数:6次 参考文献(23条) 1.Noguchi M;Nayar S K Microscopic shape from focus using active illumination[外文会议] 1994(01) 2.Cohen F S;Patel M A A new approach for extracting shape from texture,Intelligent Control,1990 1990 3.Nayar S K;Watanabe M;Noguchi M Real-time focus range sensor[外文期刊] 1996(12) 4.Ghita O;Whelan P F A bin picking system based on depth from defocus[外文期刊] 2003(04) 5.POSDAMER J L;Altschuler M D Surface measurement by space-encoded projected beam systems[外文期刊] 1982(01) 6.WOODHAM R J Photometric method for determining surface orientation from multiple images 1980(01) 7.Miyasaka T;Kuroda K;Hirose M High speed 3-D measurement system using incoherent light source for human performance analysis 2000 8.Carrihill B;Hummel R Experiments with the intensity ratio depth sensor 1985 9.Maruyama M;Abe S Range sensing by projecting multiple slits with random cuts[外文期刊] 1993(06) 10.Caspi D;Kiryati N;Shamir J Range imaging with adaptive color structured light[外文期刊] 1998(05) 11.Horn E;Kiryati N Toward optimal structured light patterns[外文期刊] 1999(02) 12.Rocchini C;Cignoni P;Montani M A low cost 3D scanner based on structured light 2001(03) 13.Inokuchi S;Sato K;Matsuda F Range imaging system for 3-D object recognition 1984 14.Horn B K P;Brooks M Shape from Shading 1989 15.Schubert E Fast 3D object recognition using multiple color coded illumination[外文会议] 1997 16.Pulli K Acquisition and visualization of colored 3D objects[外文会议] 1998 17.Sato K;Inokuchi S Three-dimensional surface measurement by space encoding range imaging 1985(02) 18.Daniel Scharstein;Richard Szeliski High-Accuracy Stereo Depth Maps Using Structured Light[外文会议] 2003 19.Batlle J;Mouaddib E;Salvi J Recent progress in coded structured light as a technique to solve the correspondence problem: a survey[外文期刊] 1998(07) 20.Yoshizawa T The recent trend of moiremetrology 1991(03) 21.Li Zhang;Curless B;Seitz S M Rapid Shape Acquisition Using Color Structured Light and Multi-pass Dynamic Programming[外文会议] 2002 22.Sato T Multispectral pattern projection range finder 1999 23.EL-Hakim S F;Beraldin J A;Blais F A Comparative Evaluation of the Performance of Passive and Active 3-D Vision Systems 1995 本文读者也读过(2条) 1.欧阳俊华.OUYANG Jun-hua近距离三维激光扫描技术[期刊论文]-红外2006,27(3)
三维立体电影制作流程
1、三维立体电影制作流程 三维立体电影,即我们常说的4D电影,是立体电影和特技影院结合的产物。随着三维软件在国内越来越广泛的应用,4D电影也得到了飞速的发展。运用三维软件制作立体电影有其独特的优势,如三维场景本身就具有立体特性,与立体成像相关的各种参数非常容易在软件环境中调节等。本文具体讲解了三维立体电影制作的原理及常见问题的解决方法,以后我们还会在具体的制作方面继续探讨,希望广大对立体电影感兴趣的朋友不要错过。 4D电影:4D电影是立体电影和特技影院结合的产物。除了立体的视觉画面外,放映现场还能模拟闪电、烟雾、雪花、气味等自然现象,观众的座椅还能产生下坠、震动、喷风、喷水、扫腿等动作。这些现场特技效果和立体画面与剧情紧密结合,在视觉和身体体验上给观众带来全新的娱乐效果,犹如身临其境,紧张刺激。4D影院最早出现在美国,如著名的蜘蛛侠、飞跃加州、T2等项目,都广泛采用了4D电影的形式。近年来,随着三维软件广泛运用于立体电影的制作,4D电影在国内也得到了飞速的发展,画面效果和现场特技的制作水平都有了长足的进步,先后在深圳、北京、上海、大连、成都等地出现了几十家4D影院。这些影院大都出现在各种主题公园(乐园)、科普场所中,深受观众和游客的喜爱。
运用三维软件制作立体电影有其独特的优势,如三维场景本身就具有立体特性,与立体成像相关的各种参数非常容易在软件环境中调节等。所以,计算机三维技术应用于影视行业后,很快就出现了三维立体电影,如大家俗称的3D电影、4D电影。美国迪士尼乐园中的蜘蛛侠(SpiderMan),更是解决了“三维立体跟踪渲染”技术,使画面中的立体场景能够根据游客的运动轨迹自动地转换透视关系,能够适时地保持虚景(三维画面)和实景(现场布景)一致和连续的透视关系,大大提高了画面的真实感。那么,怎样运用三维软件来制作立体电影?制作过程中要注意哪些问题?本文将通过对三维立体电影的制作原理的详细分析,探讨一些常见问题的解决方法。 人眼的立体成像原理 在现实生活中,人们通过眼睛观察的周围环境之所以是立体的,是因为人的两只眼睛所处的空间位置不同,可以从两个不同的视角同时获得两幅不同的场景图像,人的大脑对这两幅图像进行处理后,不仅能分辨出所观察物体的颜色、质感等光学信息,还能根据两幅图像的差异判断出物体
放大内镜和窄带成像技术发现早期胃癌(组织分型及浸润深度)(参考提供)
放大内镜和窄带成像技术发现早期胃癌(组织分型及浸润深 度) VS 经典分型在区分癌与非癌上发挥了重要作用,后期学者又进一步对MV/MS 分型细化,以期预测组织学分型和早癌浸润深度,从而为后期内镜或外科治疗提供决策。 在预测组织学分型上,2010 年Akira 推出基于MV 的胃早癌ME+NBI 分型,即FNP(精细网格,fine network pattern),CSP(螺旋型,corkscrew pattern)(图1),此前一直被定义为「未分类型」的表型被进一步细化为IIL-1(小叶内环型-1,intra-lobular loop pattern-1),ILL-2(小叶内环型-2, intra-lobular loop pattern-2)(图2)。根据研究结果,FNP 与ILL-1 大部分为分化型腺癌,而CSP 多为未分化型腺癌。ILL-2 主要分布于分化型腺癌,但也可在未分化腺癌中存在。此外,64% 未分化ILL-2 腺癌中可见CS(螺旋状)微血管(图3),但在分化腺癌中未见此现象发生。 图1 FNP 与CSP 分型。A FNP 为MV 的精细网络状结构;B CSP 为MV 的螺旋型结构 图2 ILL-1 与ILL-2 分型。A ILL-1 为包含环形MV 的绒毛状腺体结构;B ILL-2 为上述基础上出现腺体断裂 图3 IIL-2 型胃癌中出现CS 型MV。A 胃体中部后壁一
0-IIc 型早癌;B NBI 可见不规则茶色区域;C ME+NBI:断裂绒毛状腺体上可见CS 型MV;D 病理示黏膜固有层未分化腺癌相反,Masashi 等另辟蹊径,从癌灶周围非癌黏膜表型推测癌灶组织学类型,将癌灶周围非癌黏膜的ME+NBI 表现分为以下四型:A 点状型(圆形或针眼点状);B 短线状(扩张、垂直长凹痕结构);C 条纹型(管样,小梁嵴样结构);D 颗粒型(绒毛、乳头状结构)(图4)。该分型由sakaki 的胃黏膜ME+NBI 七类分型简化而来。C 与D 预测着分化型癌的组织类型,其理论基础是 C 和 D 表型为黏膜萎缩相关表型,是分化型癌(肠型)发生基础。B 型为HP (-)炎性黏膜表型,萎缩程度较 C 和 D 轻,预测未分化型癌组织学类型,也间接反映了不同于分化型癌的发生路径。 图4 胃癌周围黏膜的ME+NBI 分型。a-d 分别对应A-D 分型以下为ABCD 分型应用实例: 图5 A 白光下病灶经靛胭脂染色后,病变为平坦结节形高分化腺癌,周围黏膜呈细颗粒样萎缩表现;B 放大后观察,可见小绒毛状结构(D 型) 图6 A 胃体中部前壁可见凹陷型未分化型早癌,褪色,大小约10 mm;B 放大观察,背景黏膜为B 型(短线状)2014 年Takashi 等通过多元逐步回归分析认为MV 结构缺失
机器视觉检测讲解
研究背景: 产品表面质量是产品质量的重要组成部分,也是产品商业价值的重要保障。产品表面缺陷检测技术从最初的依靠人工目视检测到现在以CCD 和数字图像处理技术为代表的计算机视觉检测技术,大致经历了三个阶段,分别是传统检测技术阶段、无损检测技术阶段、计算机视觉检测技术阶段。[] 传统检测技术 (1)人工目视检测法 (2)频闪检测法 无损检测技术 (1)涡流检测法 (2)红外检测法 (3)漏磁检测法 计算机视觉检测技术 (1)激光扫描检测法 (2)CCD 检测法 采用荧光管等照明设备,以一定方向照射到物体表面上,使用CCD摄像机来扫描物体表面,并将获得的图像信号输入计算机,通过图像预处理、缺陷区域的边缘检测、缺陷图像二值化等图像处理后,提取图像中的表面缺陷的相关特征参数,再进行缺陷图像识别,从而判断出是否存在缺陷及缺陷的种类信息等。 优点:实时性好,精确度高,灵活性好,用途易于扩充,非接触式无损检测。 基于机器视觉的缺陷检测系统优点: 集成化生产缩短产品进入市场时间改进生产流程100%质量保证实时过程监控提高产量精确检测100%检测 由于经济和技术原因国内绝大多数图像处理技术公司都以代理国外产品为主,没有或者很少涉足拥有自主知识产权的机器视觉在线检测设备,对视觉技术的开发应用停留在比较低端的小系统集成上,对需要进行大数据量的实时在线检测的研究很少也很少有成功案例,但是随着国内经济发展和技术手段不断提高对产品质量检测要求就更高,对在线检测设备的需求也就更大具有巨大的市场潜力。 机器视觉图像处理技术是视觉检测的核心技术 铸件常见缺陷:砂眼气孔缩孔披缝粘砂冷隔掉砂毛刺浇不足缺陷变形 问题的提出: 1.水渍、污迹等不属于铸件缺陷,但由于其外观形貌与缺陷非常类似, 因此易被检测系统误识为缺陷。从目前发表的文献来看,对于伪缺陷的识别率较低。 2.不同种缺陷之间可能存在形状、纹理等方面的相似性,造成缺陷误判。 国外研究发展现状: 20 世纪90 年代后,基于机器视觉检测系统的自动化功能和实用化水平得到了进一步的提高。 1990 年芬兰Rautaruukki New Technology公司研制了Smartivis表面检测系统[],该系统具有自学习分类功能,应用机器学习方法对决策树结构进行自动设计优化。 1996 年美国Cognex公司研发了一套iLearn自学习分类器软件系统并应用于其研制了iS-2000 自动检测系统。通过这两套系统的无缝衔接,极大地提高了检测系统实时的运算速度,有效的改进了传统自学习分类方法在算法执行速度、数据实时吞吐量、样本训练集规模及模式特征自动选择等方面的不足之处[]。 2004 年Parsytec公司发布了新一代表面质量检测产品Parsytec5i,该系统运用了自学习神经
内窥镜研究与设计
1 绪论 1.1 内窥镜的国内外发展现状 1.1.1 国内研究现状及主要研究内容 从1980年代起,国内陆续开始自主研究,生产硬式内窥镜、光纤内窥镜,并且引进电子内窥镜技术,生产电子内窥镜系列产品。己投放市场的产品有硬式内窥镜、光纤内窥镜、电子视频内窥镜三类产品。 (l)硬式内窥镜 硬式内窥镜由成像物镜、转像透镜、导光束、目镜、外管组成。硬式内窥镜成像原理是光学物镜成像,然后利用转像系统来传输图像。因此,光学镜片的加工技术水平决定了硬式内窥镜的技术水平。目前,在成像技术上,国内与国外是基本相同的。但是,在产品外部材料和外观上,与国外同类产品相比有差距,但使用效果相同。 (2)光纤内窥镜 制造光纤内窥镜关键的部件是光纤传像束,它决定产品清晰度、分辨率和使用寿命。在光纤传像束直径相同的条件下,国外光纤传像束生产线生产的光纤传像束单丝为2万余根,国产生产线生产的光纤传像束单丝为1万根以内。其内窥镜制造原理一样,但是光纤材料有差别。如果采用进口光纤传像束组装内窥镜,国内与国外同类产品的差距会减小。 例如:EKG一3002型光纤工业内窥镜是一种利用纤维光学、精密机械及电子技术结合而成的新型光学仪器。它利用光导纤维的传光、传像原理及其柔软弯曲性能,可以对设备中肉眼不易直接观察的隐蔽部位方便地进行直接快速的检查。既不需设备解体,也不需另外照明,只要将窥头插入孔内,内部情况便可一目了然。可直视,也可侧视。 还可手控窥头对被检查面进行连续上下左右扫描达100°。可目视,也可照相,还可录像或电视显示,为分析故障原因提供依据。是航天、军事、国防、无损检测、机械制造、发电、石化、汽车、兵器、交通、冶金、压力容器等领域中得心应手的直观高效的检测仪器。 EKG一3002型工业内窥镜主要技术参数: l)探头外径:Ф6.5~Ф15mm 2)探测长度:1.8~4.5m 3)工作距离:10~80mm 4)视场角:≥100° (3)电子内窥镜 国内制造商均采用进口CCD原件,组装电子工业内窥镜产品,整机主体技参数与外国产品的相接近。在航天航空行业等己基本能够满足NDT正常使用。国外产品最小直径为6mm,国内
NBI窄带成像内镜基本原理及临床应用
窄带成像内镜 又称为内镜窄带成像术(Narrow Band Imaging,NBI),是一种新兴的内镜技术,它是利用滤光器过滤掉内镜光源所发出的红蓝绿光波中的宽带光谱,仅留下窄带光谱用于诊断消化道各种疾病。NBI内镜技术主要的优势在于:不仅能够精确观察消化道黏膜上皮形态,如上皮腺凹结构,还可以观察上皮血管网的形态。这种新技术能够更好地帮助内镜医生区分胃肠道上皮,如Barrett食管中的肠化生上皮,胃肠道炎症中血管形态的改变,以及胃肠道早期肿瘤腺凹不规则改变,从而提高内镜诊断的准确率。 1简介编辑 内镜窄带成像术(NBI)作为一种新兴的内镜技术,已初步显示出它在消化道良、恶性疾病的诊断价值。NBI的窄带光谱有利于增强消化道黏膜血管的图像,在一些伴有微血管改变的病变,NBI系统较普通内镜有着明显的优势。目前,NBI已在多领域广泛开展,应用范围除消化道外,还包括耳鼻咽喉、呼吸道、妇科内镜与腹腔镜外科等。 2用途编辑 具NBI功能的内镜其外形和常规操作与普通内镜基本一致,在操作中可随时切换至NBI模式观察病灶。对于附带NBI功能的变焦放大内镜而言,在对病灶近距离放大观察后再开启NBI 模式,能更清晰地了解病灶表面的黏膜凹窝形态及血管等,方便对病灶进行定性与靶向活检。目前,NBI在临床工作中的应用包括: ①微小病灶的早期发现与诊断;②联合放大内镜观察其细微结构,进一步评价其特性并预测组织病理学结果;③作为病灶靶向活检及内镜下治疗的定位手段。 NBI技术的应用大大提高了中下咽部早期癌、食管上皮内癌、Barrett食管、早期胃癌、结肠早期癌的诊断及检出率。 NBI图像中血管和粘膜的颜色对比率明显更大,易于对食管上皮微血管(IPCL)的形态观察和评价,尤其是对无经验的内镜医师更易于发现病变。与组织学金标准相比,使用NBI内镜对IPCL的评价预测肿瘤浸润深度的精确性可达85%,因此,日本内镜学会建议在食管鳞癌的筛检中应常规使用HR-NBI。Barrett食管是食管腺癌唯一癌前病变,使用NBI加放大内镜联合检查Barrett食管,较传统电子内镜更容易呈现鳞柱上皮交界处,能更清晰地显示Barrett 上皮血管网的形态,并能较好地对Barrett上皮进行粘膜腺凹形态分型。资料显示,放大内镜、NBI加放大内镜和靛胭脂染色放大内镜能清楚地显示上皮腺凹的比例分别为14%、61%和70%。另外,通过活检证实其对异型增生诊断的准确性分别为42%、73%和79%。表明NBI 加放大内镜优于普通放大内镜,具有与染色放大内镜相近的诊断率。 大多数的胃癌被认为来源于一系列粘膜改变,经历Hp相关性胃炎、萎缩性胃炎、肠上皮化生和上皮内瘤变到肿瘤。越来越多研究证明,胃粘膜表面微血管结构的观察可以提高胃癌前病变和早癌诊断的敏感性。放大内镜结合NBI系统虽然不能取代组织学检查,但是能预测胃癌的组织学的特征。NBI放大内镜通过照射到胃黏膜中肠化上皮顶端可产生淡蓝色冠(LBC),人们根据这一特点应用NBI放大内镜在萎缩性胃炎中识别肠上皮化生的区域。临床观察结果显示,NBI识别肠上皮化生的敏感性为89%,特异性为93%。因此,NBI放大内镜通过淡蓝色冠这一特点,能较准确地发现胃黏膜中的肠上皮化生。 由于放大内镜在结肠癌的诊断中应用较成熟,且结肠黏膜较薄,微血管易见。因此,NBI系统对结肠疾病的鉴别和诊断帮助较大。NBI系统观察黏膜表面变化,判断肿瘤或非肿瘤病变的符合率比普通内镜和染色内镜高,敏感性强。NBI对结肠增生性息肉、腺瘤和早期癌的诊断敏感性为95.7% ,特异性为87.5%,准确性为92.7%。 3原理编辑 传统的电子内镜使用氙灯作为照明光,这种被称为“白光”的宽带光谱实际上是由R/G/B(红/绿/蓝)3种光组成的,其波长分别为605nm、540nm、415nm。NBI系统采用窄带滤光器代
3D立体成像技术简介
3D立体成像技术简介 3D立体成像技术其实并不是一个新鲜事物。如果从时间上看,3D立体成像 技术早在上个世纪中叶就已经出现,比起现在主流的的液晶、等离子这些平板 显示技术,历史更加悠久。 那么现在的3D电视,到底使用了哪些方式来实现所谓的“全高清无闪烁”的立体影像呢? 色差式3D 历史悠久缺点最多 首先我们看看最早出现的也是最容易实现的一种3D立体成像技术:色差式 3D成像技术。 从技术层面上看色差式3D立体成像是比较简单的一种方法,这种3D成像 只需要通过一副简单的红蓝(或者红绿)眼镜就可实现,硬件成本不过几元钱。显示设备方面也无需额外的升级,现有的任何显示设备都可以直接显示。 色差式3D立体成像技术的原理是将两张不同视角上拍摄的影像分别以两种不同的颜色印制在同一副画面中,如果不戴眼镜,我们只能看到色彩重合的模 糊图像。但是戴上眼镜后,左右眼不同颜色的镜片分别过滤了对应的色彩,只 有红色的影像通过红色镜片蓝色通过蓝色镜片,最终两只眼睛看到的不同影像 在人脑中重叠产生了立体效果。 色差式3D立体成像原理简单,能达到的3D景深效果也还算不错。不过由 于采用的色度分离方式会给观看者带来比较严重的视觉障碍,舒适感始终不能 让人满意,同时画面的色彩还原效果也一直在较低的水准徘徊,这就导致了它 很难成为3D立体显示技术中的主流。 偏光式3D 影院主流家庭不易实现 在3D电视大量出现之前,3D影院其实已经进入我们的生活很长一段时间。而在3D影院之中最为常见的,就是偏光式3D技术。 偏光式3D技术主要利用偏振光分离技术实现3D立体成像。观看者通过佩 戴偏振眼镜,左右眼镜片就分别过滤掉不同偏振方向的光线,从而实现了左右 眼画面的分离。 影院方面在具体实施的时候主要有两种方式:双机3D和单机3D。双机3D 多用在IMAX 3D影院中,通过使用两台投影机,分别透射偏振方向不一样的左 右眼画面。单机3D相对简单,主要通过但抬头迎和快速切换的偏振器来分别高速切换左右眼画面,最终再通过偏振眼镜进行左右眼画面的分离。
1080P高清内窥镜系统指导手册
用户指导手册 全高清内窥镜系统 适用系列 目录 i.菜单功能................................................................. 错误!未定义书签。 ①.色彩校正.......................................................... 错误!未定义书签。 ②.场景切换.......................................................... 错误!未定义书签。 ③.自定义场景........................................................ 错误!未定义书签。 ④.画面偏移.......................................................... 错误!未定义书签。 ⑤.时间日期显示...................................................... 错误!未定义书签。 ⑥.摄像头按键定义.................................................... 错误!未定义书签。 ⑦.菜单显示或隐藏.................................................... 错误!未定义书签。 ⑧.版本升级.......................................................... 错误!未定义书签。 ii.接口定义................................................................. 错误!未定义书签。 ⑨.前面板按键定义.................................................... 错误!未定义书签。 ⑩.摄像头接口定义.................................................... 错误!未定义书签。 ?.主板接口定义...................................................... 错误!未定义书签。 iii..................................................................................... 连接示意图错误!未定义书签。 前言 (A) 所有的产品版权均属于中安视达(以下简称ZSTEK)所有,未经ZSTEK同意,不得将对应的资料泄露给第三方。 (B) 此文档仅供技术参考,如有更新,恕不另外通知。 (C) 了解获取更多ZSTEK产品资讯,请访问公司官方网站或邮件. i.菜单功能
三维立体投影显示系统方案
一、单通道三维立体投影显示系统 单通道三维立体投影显示系统是一套基于高端PC 虚拟现实工作站平台的入门级虚拟现实三维投影显示系统,该系统通常以一台图形计算机为实时驱动平台,两台叠加的立体版专业LCD或DLP投影机作为投影主体显示一幅高分辨率的立体投影影像,所以通常又称之为单通道立体投影系统。我们采用成熟的偏振光成像技术或世界最先进的光谱分离立体成像技术来生成单通道立体图像。 采用光谱分离立体成像技术最大的优点是三维立体图像色彩饱和度更高、立体感更强,为虚拟仿真用户提供一个有立体感的沉浸式虚拟三维显示和交互环境,同时也可以显示非立体影像,而由于虚拟仿真应用的特性和要求,通常情况下均使用其立体模式。 在虚拟现实应用中用以显示实时的虚拟现实仿真应用程序,该系统通常主要包括专业投影显示系统、悬挂系统、成像装置等三部分,在众多的虚拟现实三维显示系统中,单通道立体投影系统是一种低成本、操作简便、占用空间较小(可选择正投或背投)具有极好性能价格比的小型虚拟三维投影显示系统,其集成的显示系统使安装、操作使用更加容易方便,被广泛应用于高等院校和科研院所的虚拟现实实验室中。投影系统是正投或背投,应该依据展示空间面积大小与实际需要来选择。正投系统更为紧凑,占用的空间更小,投影幕墙具有较好的稳定性。背投主要适用于空间比较大,而且投影前需要讲解人的场合。由于光线从另一侧打在投影幕上,讲解人不会挡住光线,也不会被强烈的光线损伤视力。 系统结构示意图
二、双通道立体投影显示系统 为了拓宽观察视角,满足控制室与演示中心多面板现实的需要,我们使用两套立体投影设备拼接成为宽幅面的双通道平板立体显示系统。 双通道显示系统的宽度适宜进行平 板显示(如果是更大的视角,使用柱面环 幕则更有利于产生视野封闭的巨大沉浸 感。) 对于双通道立体投影显示系统而言, 各通道间的亮度与色彩平衡也是至关重 要的技术要求。目前通常采用偏振立体成 像技术实现被动式三维立体成像,就是在 输出左右立体像对的两台高亮度的LCD 或DLP投影机前安装具有不同极化方向 的偏振片。但其所使用的投影幕必须是具 有高增益指数的金属投影幕,而且投影幅 面一般应该控制在150英寸范围以内,否则在不同的视点观看时会出现因高增益而引起的“太阳效应”,所以不适用于多通道立体投影显示系统。目前,一种全新的基于光学虑波的技术成功解决了这个问题,它就是来自德国的Infitec plus,Infitec plus是目前世界最先进的立体成像技术,中铭科技推出的多通道虚拟现实系统正是基于该项技术的一套完美的多通道虚拟现实投影显示系统解决方案。 偏振技术成像的太阳效应Infitec立体成像技术的效果Infitec技术(干涉滤波技术)采用高质量滤光技术,分离光谱以便适合人的每只眼睛,生成无重像的被动立体图像,所以,无需特殊的具有偏振特性的屏幕或电子眼镜,只需配戴专业Infitec眼镜即可,Infitec 眼镜不需要配备电源和复杂 的电路,因此舒适感和沉浸 感更好,眼镜轻便,由于不 需信号同步发射器,所以配 戴者的头部可随意移动,配 戴者互相之间不会产生干 扰,这样Infitec还可以满足 有大量观众场合的应用。