临近空间低速飞行器螺旋桨技术

临近空间低速飞行器螺旋桨技术
杜绵银,陈培,李广佳,周波
(中国航天空气动力技术研究院,北京 100074)
摘要:临近空间飞行器因其显著特点和潜在的军、民两用价值而成为当前各国研究的热点。螺旋桨推进是低速临近空间飞行器的主要推进动力方式。本文介绍了临近空间发展、螺旋桨的发展及其在低速临近空间飞行器特别是高空飞艇及高空太阳能无人机上的应用,分析了低速临近空间飞行器螺旋桨设计、试验、制造的技术特点及技术难点。
关键词:临近空间;螺旋桨;平流层飞艇;高空长航时无人机
引言
未来战争是空天地海电磁五位一体的体系对抗,空天是重要的战略制高点,图1显示了各个高度范围人类研制和构想的各种空天飞行器。距地面20km以下的范围是传统航空器主要活动区域,100km以上的太空则是航天器的运行空间。而介于两者之间即20~100km的临近空间,该空域大气稀薄、气象活动较弱包括了大气层中对流层顶、平流层、中间层和热层下边界,由于技术和认识上的原因,长期以来是一个相对独立的“和平地带”,各国均未给予太多关注。目前,随着航空航天技术的统一和融合,临近空间作为一个新兴的技术领域,其重要的战略价值日益受到世界各国的高度重视。美国、俄罗斯、欧洲、韩国、英国、日本、以色列等国家纷纷投入大量的经费,积极开展临近空间飞行器的技术与应用研究。但从发展总体水平上看,国外临近空间飞行器技术仍处于关键技术攻关与演示验证阶段,要获得较高的军用价值仍需实现关键技术上的突破[1]。
图1 空间飞行器概念示意图
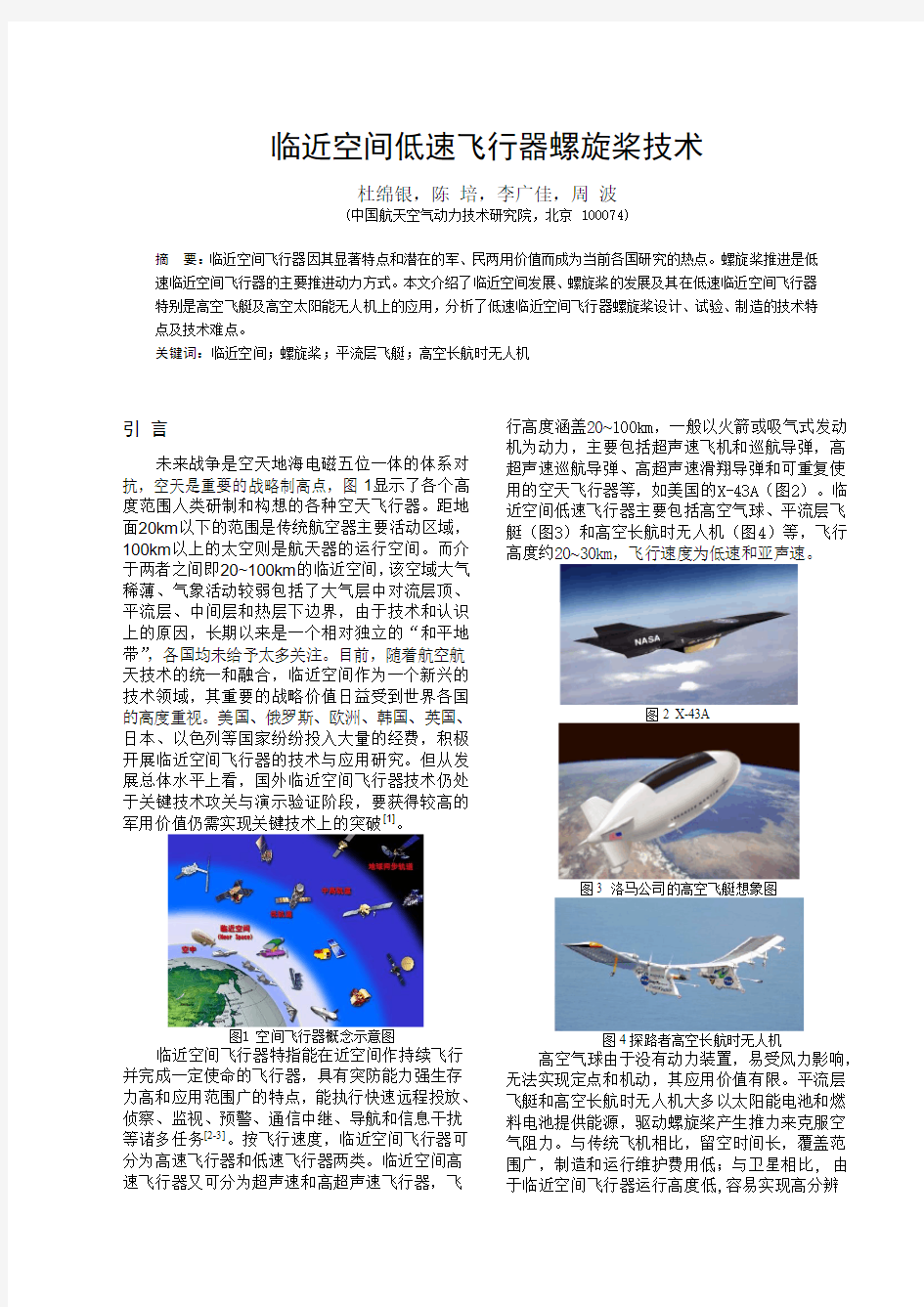
临近空间飞行器特指能在近空间作持续飞行并完成一定使命的飞行器,具有突防能力强生存力高和应用范围广的特点,能执行快速远程投放、侦察、监视、预警、通信中继、导航和信息干扰等诸多任务[2-3]。按飞行速度,临近空间飞行器可分为高速飞行器和低速飞行器两类。临近空间高速飞行器又可分为超声速和高超声速飞行器,飞行高度涵盖20~100km,一般以火箭或吸气式发动机为动力,主要包括超声速飞机和巡航导弹,高超声速巡航导弹、高超声速滑翔导弹和可重复使用的空天飞行器等,如美国的X-43A(图2)。临近空间低速飞行器主要包括高空气球、平流层飞艇(图3)和高空长航时无人机(图4)等,飞行高度约20~30km,飞行速度为低速和亚声速。
图
2 X-43A
图3 洛马公司的高空飞艇想象图
图4探路者高空长航时无人机
高空气球由于没有动力装置,易受风力影响,无法实现定点和机动,其应用价值有限。平流层飞艇和高空长航时无人机大多以太阳能电池和燃料电池提供能源,驱动螺旋桨产生推力来克服空气阻力。与传统飞机相比,留空时间长,覆盖范围广,制造和运行维护费用低;与卫星相比, 由于临近空间飞行器运行高度低,容易实现高分辨
率对地观测,制造成本低,发射设施和地面支持设备要求也比较低,大部分部件和有效载荷可回收重复使用,因此效费比高。
由于临近空间环境低密度空气等各种因素影响,常规推进系统的效率会显著降低,根据当前国际上推进系统的发展水平,以及临近空间飞行器的长时间滞空停留和太阳能利用等多方面要素的综合考虑,螺旋桨仍然是低速临近空间飞行器的主要推进动力方式。
1 螺旋桨概述
早期的飞机基本是依靠机身前端的螺旋桨旋转产生的牵引力而向前运动,因此飞机飞行速度低,直至喷气发动机的出现。喷气发动机是把吸入的空气压缩,再与燃料混合燃烧,形成高温高压气体并向后喷出,产生强大的推动力,大大提高飞机飞行速度。喷气式飞机的油耗比较高,制造复杂;但是,在许多不需要高速飞行的工作中,螺旋桨飞机仍然具有一定的优势并发挥着重要的作用,如执行喷洒农药、森林防火等任务。另外,涡轮螺旋桨飞机在较短途的飞行中具有更低油耗,庞巴迪的多个支线机、C130J、A400M及多个国家的运输机也都采用的是涡轮螺旋桨技术。
图5 螺旋桨示意图
图6 A400M运输机
临近空间技术的研制中,螺旋桨质量轻、驱动低速飞行的高效性能,能够满足飞艇、无人机等低速临近空间飞行器高空长航时飞行对动力推进系统的需求,这也就成为目前国内外高空飞艇、高空长航时无人机推进装置设计时一般采用螺旋桨作为推进器的主要原因[4~9]。例如,由DARPA 提出的“海象”飞艇是一种“混合”式飞行器,采用轻于空气的浮空器与推进系统共同提供飞行升力,于2005年1月,洛克希德·马丁公司进行了缩比尺寸的“海象”验证艇(命名为P-791)飞行试验,该验证飞艇大约有120ft长,约为“海象”要求尺寸的1/4,有2个融合艇体、4个螺旋桨,螺旋桨位于艇体两侧及艇体后部。2008年8月,英国研制的“西风”高空远程太阳能无人机采用超轻型碳纤维制造机身,重量只有50kg,翼展达到22.5m,飞行时间达到82小时37分钟。“太阳神”高空长航时太阳能无人机也采用大展弦比机翼,分布式螺旋桨推进系统方式,安装有多达14个螺旋桨。
如上述诸例,在高度30km左右的临近空间,低速或静止的飞艇采用电动螺旋桨产生推力的可行性已得到飞行验证,但随高度上升大气环境变化,电动螺旋桨可能会力不从心,这有待于进一步研究。就临近空间飞行器电动螺旋桨而言,亟待突破的技术主要是先进电机的设计和高空低雷诺数下螺旋桨的设计,螺旋桨的设计又包括桨距、直径以及桨的数目确定等内容。
目前,临近空间飞行器螺旋桨可取定距和变距两大类方式,两类各有优缺点。定距螺旋桨只能在选定的速度范围内效率较高。变距螺旋桨,即通过控制装置改变螺旋桨的桨距,使得在较宽的速度范围内具有较高的效率。但变距螺旋桨结构复杂,机构重量较大,这并不利于低速临近空间飞行器控制重量的要求。为减少可动部件,长航时太阳能无人机大多采用定矩螺旋桨,也有无人机如“秃鹰”无人机,则应用了三叶片变桨距螺旋桨。高空飞艇采用的变距螺旋桨较多,以获得较高的效率。
相对传统螺旋桨,变直径螺旋桨和双螺旋桨系统是正在研究新概念螺旋桨。变直径螺旋桨可以通过增加螺旋桨的直径来保持推力不变。变直径螺旋桨主要用于倾转旋翼飞行器的垂直起降。目前螺旋桨直径能够延长30%。变直径螺旋桨技术还处于早期发展阶段。双螺旋桨系统则采用两套大小不同、相互独立的螺旋桨。小螺旋桨针对低空运行设计,大螺旋桨针对高空运行设计,通过离合器使螺旋桨与驱动轴实现啮合和脱离以保证推进系统具有较高的效率。双桨系统的缺陷是增加了额外的重量,控制系统设计比单桨更为复杂。
复杂而特殊的环境特性,是形成螺旋桨设计技术难点的主要原因之一。低速临近空间飞行器升降过程高度变化范围从地面到20km或更高的空间,大气密度变化大,雷诺数较低,螺旋桨雷诺数约105~5×106,高、低空气动特性、可用推力和功率都发生很大变化。20km左右的平流层空气密度约海平面处的1/14,压强约1/18,呈高空低雷诺数效应。由此,普通螺旋桨翼型在小攻角下可能出现图7所示的层流分离。升力系数随攻角增大缓慢增加并出现静态滞回,而阻力系数迅速增大,导致螺旋桨气动效率严重下降。同时,为了弥补平流层大气密度降低引起的螺旋桨推力和功率损
失,保证推进系统有足够的抗风和推进能力,高空螺旋桨直径和转速都比较大,而高空声速比地面又有所降低,导致叶尖局部马赫数较高甚至出现激波,进一步加剧了气流分离损失。因而要求螺旋桨具有良好的适应性。目前对这类低雷诺数、高亚声速流动的研究还不多。
另外,临近空间飞行器螺旋桨,其直径大、相对厚度薄、截面扭角较大、轻质高强、良好的抗疲劳性能和抗辐射性能,这对结构、材料以及相应的制造技术也提出了更高要求。
图7 层流分离
2 螺旋桨的布局
常规飞艇推进器的布局方案有尾部推进、两侧推进、两侧和尾部同时推进三种[10-11]。尾部推进的优点是:直接力的作用点远离飞行器的重心,操纵效率高,艇身层流区域大摩阻低,同时由于尾桨对艇体后部分离气体的吸附作用,降低了压阻;缺点是偏航控制力矩不足。两侧推进方案,推进装置距离重心的距离也较远,可以提供较大的偏航力矩,另外,通过改变螺旋桨的转速差也可实现飞艇倾斜或者偏航控制,这种方案机动性强,但总体耗能高,发动机的位置过于靠外,需要有刚性的支撑构架。两侧和尾部同时推进方案结合了以上前两者的优点,尾部推进器的功率约占总推进功率的70%,两侧主要提供操纵力矩。
高空太阳能无人机一般采用大展弦比机翼,分布式螺旋桨推进系统方式。螺旋桨伸出机翼前缘,性能不会受到机翼干扰影响,但螺旋桨的滑流效应对机翼具有一定的影响。
3 螺旋桨气动设计及性能分析
高空低密度和低雷诺数螺旋桨翼型绕流雷诺数较低且马赫数较高,大跨度飞行高度内风速变化大导致螺旋桨工作迎角变化很大,因此,应该采用低雷诺数高亚声速高升力翼型,且在较大的迎角范围内都有较好的升阻特性,失速特性缓和。目前大多数可选用的常规翼型都是为了满足高雷诺数(>107)而设计的,它们的最大升力系数普遍偏低,航时因子不高,特别是在低Re数(约106)下这些翼型将出现层流分离泡,严重影响气动性能。适用于临近空间飞行器螺旋桨低密度、低雷诺数、高马赫数、大跨飞高的高升力翼型,以及临近空间飞行器螺旋桨翼型设计的重点是尽量保持翼型前缘处为附着流,抑制层流分离泡的产生和推迟分离。对比LNV109A、Eppler族和
S1223低雷诺数高升力翼型发现,类Stratford凹压力分布和后缘加载设计是实现高升力和失速平缓的关键[12]。总的来说,高空低空气密度和低雷诺数螺旋桨构型和设计的相关研究基础不是很多。因此开展该领域的关键技术攻关很有必要性。
临近空间飞行器螺旋桨的设计目标是:满足功率和推力需求的前提下,尽可能质量轻、效率高、振动小、噪声低,并有一定结构安全余度(裕度?)。螺旋桨设计的两个主要因素:直径和转速。其中,转速取决于桨尖马赫数,而传统设计中,桨尖马赫数一般不大于0.75,以避免桨尖激波的产生从而降低螺旋桨的气动特性。图8给出了高度24.5km下转速与直径的关系[13]。
图8 转速与直径的关系
螺旋桨气动设计方法主要有两种:一种是气动设计参数综合分析方法;另一种是优化设计方法。目前主要采用气动设计参数综合分析方法,该方法以满足设计指标为目的,运用性能分析软件和风洞试验对翼型的选择及配置、桨叶扭转角、桨尖形状等桨叶气动设计参数进行参数敏感性分析,并通过综合分析处理,最后得到能满足设计指标要求的初步设计方案。优化设计方法则以达到最佳目标为目的,目标函数可选取不同的设计目标的综合指标,设计变量为沿桨叶展向变化的剖面弦长、相对厚度和几何扭角,约束条件包括结构约束和性能约束,初始值可根据设计经验给出,优化方法根据数学模型的特点选取。另外,螺旋桨气动设计方案还要根据模型试验和试飞验证反复修正才能最终确定。
螺旋桨性能分析方法包括工程方法、CFD方法和性能试验三种。工程方法主要包括叶素理论、动量理论和涡流理论等。叶素理论把桨叶分为许多独立的微段(叶素),将叶素视为二维翼型,每个叶素上的气动力和力矩积分可得到桨叶的气动力和力矩。叶素理论未考虑径向流动,无法计及桨叶之间的干扰。动量理论宏观上将螺旋桨的拉力和功率与来流速度联系起来,它采用诱导速度均匀假设,不能涉及桨叶几何特性。涡流理论考虑了螺旋桨的三维效应,计算了涡流产生的损失,目前已经发展了多种尾涡模型,计算结果和
试验比较接近。螺旋桨CFD分析方法则经历了小扰动位势方程、全位势方程、Euler方程和N-S方程四个发展阶段,取得了很大进步。由于计算机技术及CFD技术的发展,基于N-S方程的旋翼绕流CFD分析方法逐渐得到广泛应用。螺旋桨性能试验主要是直接获得螺旋桨在设计点和非设计点的性能。在不同来流迎角、速度和大气密度下,进行螺旋桨性能测试实验,能够得到螺旋桨的详细性能图谱。性能试验结果对于发现和修正螺旋桨设计中存在的问题起着重要作用。
图9 高空螺旋桨的CFD分析
4 螺旋桨性能试验
临近空间飞行器螺旋桨试验最主要的难点是螺旋桨及翼型试验要求满足高空低低雷诺数要求[6,13]。与二维翼型试验要求不同,临近空间飞行器螺旋桨试验不只是要求马赫数与飞行马赫数匹配,由于地面空气运动粘度比20km高空低1个量级,如果要同时模拟低雷诺数和高马赫数,模型尺度必须很小(普通风洞模拟雷诺数200000,马赫数0.9的流动翼型弦长仅1.5cm量级),并且要求湍流度很低,这些条件限制了螺旋桨性能试验。由于螺旋桨桨叶受载后的形状和静态相比差别很大、而气动载荷和相应的结构变形事先未知的,我们希望螺旋桨性能试验最好采用全尺寸模型,虽然受风洞尺寸限制,通常采用缩比模型,但缩比模型不易过小。为解决该问题,一种可行做法是采用低密度风洞,如NASA Langley中心就计划在4.9m×4.9m风洞中将空气密度减小到地面大气的1/40,以此满足低雷诺数高马赫数翼型试验要求[13]。目前,高空螺旋桨性能试验无法做到完全模拟,而且误差较大。
图10 NASA Langley跨音速风洞5 结束语
临近空间飞行器分为高速飞行器和低速
飞行器。带动力的低速临近空间飞行器的主
要推进动力方式为螺旋桨推进。本文介绍了
临近空间发展、螺旋桨的发展及其在低速临
近空间飞行器特别是高空飞艇及高空太阳能
无人机上的应用,分析了低速临近空间飞行
器螺旋桨设计、试验、制造的技术特点及技
术难点,为低速临近空间飞行器和螺旋桨的
发展提供参考。
参考文献
[1]曹秀云. 美国临近空间飞行器技术发展概述. 现代军
事,2007(3)
[2]Patrick Hendrick, Laurence Hallet, Dries Verstraete.
Comparison of propulsion technologies for a HALE
airship. AIAA-2007-7747.
[3]王亚飞,安永旺,杨继何. 临近空间飞行器的现状及
发展趋势. 国防技术基础,2010(1)
[4]邓海强,余雄庆.太阳能飞机的现状和发展趋势.航
空科学技术,2006,(1):28-30
[5]高广林,李占科,宋笔锋,丁祥. 太阳能无人机关键
技术分析.飞行力学,2010,(2)
[6]Monal P. Merchant and L. Scott Miller. Propeller
Performance Measurement for Low Reynolds Numbe r UAV Applications. AIAA 2006-1127
[7]Erie R Moomey. Technical feasibility of loitering li
ghter-than-air near-apace maneuvering vehicles. ADA 437762, March 2005.
[8]李兆杰. 高空长航时飞艇的能源与推进技术. 2007年
中国浮空器大会论文集, 2007
[9]李智斌,张芸香,倪茂林. 平流层飞艇控制与推进技
术. 航天控制,2007,25(1)
[10]聂营, 王生. 平流层飞艇动力推进系统概述. 2007年
中国浮空器大会论文集, 2007
[11]郭海军. 平流层飞艇动力推进布局研究.2008年中国
浮空器大会论文集, 2008
[12]马蓉,刘沛清,胡颖.临近空间飞行器螺旋桨低雷诺数
高升力翼型综述. 中国力学学会学术大会2007论文
集, 2007
[13]Anthony Colozza. High Altitue Propeller Design an
d Analysis Overview. NASA/CR-1998-208520, Octo
ber 19
螺旋桨知识
空气螺旋桨把发动机旋转作功形式转变为直线作功形式;把发动机的功率转变为拉动飞机前进的有效功率。它的工作效率及与发动机有配合程度,直接影响模型飞机的性能。在航模竞技比赛中,出于追求动力组极限水平的需要,对螺旋桨的要求更为“苛刻”;因此以“量体裁衣”手工方式制作螺旋桨的好处显而易见。航模初学者能够扎实地掌握这一手艺很有必要。 本文以一个直径(D)200mm、几何桨距(H)120mm的两叶等距螺旋桨(适用于装有1.5cc 压燃式发动机或2.5cc电热式发动机的特技模型飞机)为例,介绍削制螺旋桨的方法。一、螺旋桨的一些基础概念 当我们把螺旋桨看成是一个一面旋转一面前进的机翼时,就能借助已知的空气动力学常识,直观地理解螺旋桨的基本工作原理。 1.桨距、动力桨距和几何桨距 桨距:从广义而言,可以理解为螺旋桨旋转一周沿桨轴方向所通过的直线距离。习惯上螺旋桨70%半径处的桨距值为“称呼值”,它具有标示意义。 动力桨距(Hg):桨叶旋转一周模型飞机所通过的距离(见图1)。设计螺旋桨时首先要确定动力桨距值。 几何桨距:(H):桨叶弦线迎角为零时,螺旋桨旋转一周所前进的距离(也见图1)。它体现了桨叶角的实际大小,是“看得见、摸得着”的实际参数。航模图纸上一般都标出几何桨距,是消制螺旋桨的主要依据。 2.动力桨距和几何桨距的关系 由于螺旋桨工作在接近于有利迎角下,与零度迎角之间的角差的存在,因此动力桨距值必然小于几何桨距值。几何桨距和动力桨距的关系是:几何桨距(H)= 1.1 ~ 1.3倍动力桨距(Hg)。也就是说,设计模型飞机时,动力桨距确定后,可以通过上述公式概略估算出螺旋桨的几何桨距。 3.通常使用的螺旋桨是各段几何桨距值相等的所谓等距桨。它的优点是设计、制作比较容易;缺点是工作效率劣于不等距桨。由于不等距桨各段的几何桨距值和桨角均不一样,尽管其效率高,但制作的难度大。故初学者从削等距桨起步较为稳妥。 4.桨叶角(β):桨叶角是指桨叶剖面弦线与旋转平面之间的夹角。 5.几何桨距和桨叶角的关系 几何桨距和桨叶角直接关联,是同一个问题的两种表达方式。几何桨距强调的是总体,桨叶角强调的是局部。就等距螺旋桨而言,桨叶角随其在螺旋桨半径方向上所处位置的不同而异;随着由桨根到桨尖方向的逐渐位移,桨叶角渐渐有规律地减小。(图2)
临近空间用途及发展优势与潜力
一、临近空间的概念 临近空间是指介于普通航空飞行器最高飞行高度和天基卫星最低轨道高度之间的空域。天基卫星的最低轨道约为200km,航空飞机的最大飞行高度约为20km,但从应用上讲,由于100km以下为临近空间飞行器的主要活动区域,故在国内一般定义临近空间为离地球表面约20-120km的空域,美军定义为20-100km的空域。过去所称的“近空间”、“亚轨道”、“空天过渡区”、“亚太空”、“超高空”或“高高空”等区域,都是指临近空间。 图表临近空间区域划分 资料来源:产研智库 二、临近空间飞行器综述 所谓临近空间飞行器,顾名思义是指能够飞行在临近空间执行特定任务的一种飞行器,既能比卫星提供更多更精确的信息(相对于某一特定区域),并节省使用卫星的费用,又能比通常的航空器减少遭地面敌人攻击的机会。临近空间飞行器能快速飞行在敌方战区上空而不易被敌方防空监视系统发现,从而为作战指挥官提供不间断的监视情报,以增强其对战场情况的了解能力。部署这种高空飞行器,成本低、时间快,适合现代战争的需求。 图表临近空间飞行器的设计思想、特点与关键技术 资料来源:产研智库
三、临近空间飞行器发展优势 民用领域以通信监测领域为例,与卫星相比,临近空间飞行器造价明显低于卫星,载荷能力超过卫星的2倍,延迟时间、衰减更小,且可以多次回收、重复利用。 图表临近空间飞行器与通信卫星的比较优势 资料来源:产研智库 除此之外,临近空间飞行器还具有一下优势: (一)持续工作时间长。 传统飞机的留空时间以小时为单位,临近空间飞行器的留空时间则以天为单位,目前正在研制的临近空间平台预定留空时间长达6个月,规划中的后续平台预定留空时间可达1年以上,易于长期、不间断地获得情报和数据,可对紧急事件迅速做出响应,而且人员保障少、后勤负担轻。 (二)覆盖范围广。 临近空间飞行器的飞行高度在传统飞机之上,其侦察覆盖范围比传统飞机要广得多。 (三)生存能力强。 气球或软式飞艇的囊体采用非金属材料而且低速运行,雷达和热反射截面很小,传统的跟踪和瞄准办法不易发现。与传统飞机相比,气球或软式飞艇的缺点是:充灌氦气的时间较长,在充气时需要保持稳固,有时还需要占用机库;在放飞、通过平流层上升、下降、回收和放气的过程中,由于其庞大的体积,容易受到风和湍流的影响。 四、临近空间飞行器军事用途
螺旋桨的工作原理
飞机螺旋桨工作原理一、工作原理可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。显而易见β=α+φ。空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,合成后总空气动力为ΔR。ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。螺旋桨工作时。轴向速度不随半径变化,而切线速度随半径变化。因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。所以说螺旋桨是一个扭转了的机翼更为确切。气流角实际上反映前进速度和切线速度的比值。对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。迎角变化,拉力和阻力矩也随之变化。用进矩比“J”反映桨尖处气流角,J=V/nD。式中D—螺旋桨直径。理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算: T=Ctρn2D4 P=Cpρn3D5 η=J?Ct/Cp 式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。是设计选择螺旋桨和计算飞机性能的主要依据之一。从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。对飞行速度较低而发动机转速较高的轻型飞机极为不利。例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。 二、几何参数直径(D):影响螺旋桨性能重要参数之一。一般情况下,直径增大拉力随之增大,效率随之提高。所以在结构允许的情况下尽量选直径较大的螺旋桨。此外还要考虑螺旋桨桨尖气流速度不应过大(<0.7音速),否则可能出现激波,导致效率降低。桨叶数目(B):可以认为螺旋桨的拉力系数和功率系数与桨叶数目成正比。超轻型飞机一般采用结构简单的双叶桨。只是在螺旋桨直径受到限制时,采用增加桨叶数目的方法使螺旋桨与发动机获得良好的配合。实度(σ):桨叶面积与螺旋桨旋转面积(πR2)的比值。它的影响与桨叶数目的影响相似。随实度增加拉力系数和功率系数增大。桨叶角(β):桨叶角随半径变化,其变化规律是影响桨工作性能最主要的因素。习惯上以70%直径处桨叶角值为该桨桨叶角的名称值。螺距:它是桨叶角的另一种表示方法。图1—1—22是各种意义的螺矩与桨叶角的关系。几何螺距(H):桨叶剖面迎角为零时,桨叶旋转一周所前进的距离。它反映了桨叶角的大小,更直接指出螺旋桨的工作特性。桨叶各剖面的几何螺矩可能是不相等的。习惯上以70%直径处的几何螺矩做名称值。国外可按照直径和螺距订购螺旋桨。如64/34,表示该桨直径为60英寸,几何螺矩为34英寸。实际螺距(Hg):桨叶旋转一周飞机所前进的距离。可用Hg=v/n计算螺旋桨的实际螺矩值。可按H=1.1~1.3Hg粗略估计该机所用螺旋桨几何螺矩的数值。理论螺矩(HT):设计螺旋桨时必须考虑空气流过螺旋桨时速度增加,流过螺旋桨旋转平面的气流速度大于飞行速度。因而螺旋桨相对空气而言所前进的距离一理论螺矩将大于实际螺矩。三、螺旋桨拉力在飞行中的变化1.桨叶迎角随转速的变化在飞行速度不变的情况下,转速增加,则切向速度(U)增大,进距比减小桨叶迎角增大,螺旋桨拉力系数增大(图1—1—20所示)。又由于拉力与转速平方成正比,所以增大油门时,可增大拉力。2.桨叶迎角随飞行速度的变化: 在转速不变的情况下,飞行速度增大,进距比加大,桨叶迎角减小,螺旋桨拉力系数减小。如图1—1—20所示,拉力随之降低。当飞行速度等于零时,切向速度就是合速度,桨叶迎角等于桨叶角。飞机在地面试车时,飞行速度(V)等于零,桨叶迎角最大,一些剖面由于迎角过大超过失速迎角气动性能变坏,因而螺旋桨产生的拉力不一定最大。3.螺旋桨拉力曲线: 根据螺旋桨拉力随飞行速度增大而减小的规律,可绘出螺旋桨可用拉力曲线。4.螺旋桨拉力随转速、飞行速度变化的综合情况: 在飞行中,加大油门后固定。螺旋桨的拉力随转速和飞行速度的变化过程如下: 由于发动机输出功率增大,使螺旋桨转速(切向速度)迅速增加到一定值,螺旋桨拉
模型飞机螺旋桨原理与拉力计算
模型飞机螺旋桨原理与拉力计算 一、工作原理 可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。V—轴向速度;n —螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。显而易见β=α+φ。 空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,见图1—1—19,合成后总空气动力为ΔR。ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。 从以上两图还可以看到。必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。螺旋桨工作时。轴向速度不随半径变化,而切线速度随半径变化。因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。所以说螺旋桨是一个扭转了的机翼更为确切。 从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。迎角变化,拉力和阻力矩也随之变化。用进矩比“J”反映桨尖处气流角,J=V/nD。式中D—螺旋桨直径。理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算: T=Ctρn2D4 P=Cpρn3D5 η=J·Ct/Cp 式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。是设计选择螺旋桨和计算飞机性能的主要依据之一。 从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。对飞行速度较低而发动机转速较高的轻型飞机极为不利。例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。 二、几何参数
临近空间低速飞行器螺旋桨技术
临近空间低速飞行器螺旋桨技术 杜绵银,陈培,李广佳,周波 (中国航天空气动力技术研究院,北京 100074) 摘要:临近空间飞行器因其显著特点和潜在的军、民两用价值而成为当前各国研究的热点。螺旋桨推进是低速临近空间飞行器的主要推进动力方式。本文介绍了临近空间发展、螺旋桨的发展及其在低速临近空间飞行器特别是高空飞艇及高空太阳能无人机上的应用,分析了低速临近空间飞行器螺旋桨设计、试验、制造的技术特点及技术难点。 关键词:临近空间;螺旋桨;平流层飞艇;高空长航时无人机 引言 未来战争是空天地海电磁五位一体的体系对抗,空天是重要的战略制高点,图1显示了各个高度范围人类研制和构想的各种空天飞行器。距地面20km以下的范围是传统航空器主要活动区域,100km以上的太空则是航天器的运行空间。而介于两者之间即20~100km的临近空间,该空域大气稀薄、气象活动较弱包括了大气层中对流层顶、平流层、中间层和热层下边界,由于技术和认识上的原因,长期以来是一个相对独立的“和平地带”,各国均未给予太多关注。目前,随着航空航天技术的统一和融合,临近空间作为一个新兴的技术领域,其重要的战略价值日益受到世界各国的高度重视。美国、俄罗斯、欧洲、韩国、英国、日本、以色列等国家纷纷投入大量的经费,积极开展临近空间飞行器的技术与应用研究。但从发展总体水平上看,国外临近空间飞行器技术仍处于关键技术攻关与演示验证阶段,要获得较高的军用价值仍需实现关键技术上的突破[1]。 图1 空间飞行器概念示意图 临近空间飞行器特指能在近空间作持续飞行并完成一定使命的飞行器,具有突防能力强生存力高和应用范围广的特点,能执行快速远程投放、侦察、监视、预警、通信中继、导航和信息干扰等诸多任务[2-3]。按飞行速度,临近空间飞行器可分为高速飞行器和低速飞行器两类。临近空间高速飞行器又可分为超声速和高超声速飞行器,飞行高度涵盖20~100km,一般以火箭或吸气式发动机为动力,主要包括超声速飞机和巡航导弹,高超声速巡航导弹、高超声速滑翔导弹和可重复使用的空天飞行器等,如美国的X-43A(图2)。临近空间低速飞行器主要包括高空气球、平流层飞艇(图3)和高空长航时无人机(图4)等,飞行高度约20~30km,飞行速度为低速和亚声速。 图 2 X-43A 图3 洛马公司的高空飞艇想象图 图4探路者高空长航时无人机 高空气球由于没有动力装置,易受风力影响,无法实现定点和机动,其应用价值有限。平流层飞艇和高空长航时无人机大多以太阳能电池和燃料电池提供能源,驱动螺旋桨产生推力来克服空气阻力。与传统飞机相比,留空时间长,覆盖范围广,制造和运行维护费用低;与卫星相比, 由于临近空间飞行器运行高度低,容易实现高分辨
临近空间飞行器特点及用途应用
专业经济研究智库 权威行业研究报告 一.临近空间飞行器基本概述及发展特点 (一)、临近空间的概念 临近空间是指介于普通航空飞行器最高飞行高度和天基卫星最低轨道高度之间的空域。天基卫星的最低轨道约为200km ,航空飞机的最大飞行高度约为20km ,但从应用上讲,由于100km 以下为临近空间飞行器的主要活动区域,故在国内一般定义临近空间为离地球表面约20-120km 的空域,美军定义为20-100km 的空域。过去所称的“近空间”、“亚轨道”、“空天过渡区”、“亚太空”、“超高空”或“高高空”等区域,都是指临近空间。 图表 临近空间区域划分 资料来源:产研智库 (二)、临近空间飞行器综述 所谓临近空间飞行器,顾名思义是指能够飞行在临近空间执行特定任务的一种飞行器,既能比卫星提供更多更精确的信息(相对于某一特定区域),并节省使用卫星的费用,又能比通常的航空器减少遭地面敌人攻击的机会。临近空间飞行器能快速飞行在敌方战区上空而不易被敌方防空监视系统发现,从而为作战指挥官提供不间断的监视情报,以增强其对战场情况的了解能力。部署这种高空飞行器,成本低、时间快,适合现代战争的需求。 图表 临近空间飞行器的设计思想、特点与关键技术
资料来源:产研智库 (三)、临近空间飞行器发展优势 民用领域以通信监测领域为例,与卫星相比,临近空间飞行器造价明显低于卫星,载荷能力超过卫星的2倍,延迟时间、衰减更小,且可以多次回收、重复利用。 图表临近空间飞行器与通信卫星的比较优势 资料来源:产研智库 除此之外,临近空间飞行器还具有一下优势: (一)持续工作时间长。 传统飞机的留空时间以小时为单位,临近空间飞行器的留空时间则以天为单位,目前正在研制的临近空间平台预定留空时间长达6个月,规划中的后续平台预定留空时间可达1年以上,易于长期、不间断地获得情报和数据,可对紧急事件迅速做出响应,而且人员保障少、后勤负担轻。 (二)覆盖范围广。 临近空间飞行器的飞行高度在传统飞机之上,其侦察覆盖范围比传统飞机要广得多。 (三)生存能力强。 气球或软式飞艇的囊体采用非金属材料而且低速运行,雷达和热反射截面很小,传统的跟踪和瞄准办法不易发现。与传统飞机相比,气球或软式飞艇的缺点是:充灌氦气的时间较长,在充气时需要保持稳固,有时还需要占用机库;在放飞、通过平流层上升、下降、回收和放气的过程中,由于其庞大的体积,容易受到风和湍流的影响。 二、临近空间的用途应用
飞机螺旋桨工作原理
飞机螺旋桨工作原理.txt吃吧吃吧不是罪,再胖的人也有权利去增肥!苗条背后其实是憔悴,爱你的人不会在乎你的腰围!尝尝阔别已久美食的滋味,就算撑死也是一种美!减肥最可怕的不是饥饿,而是你明明不饿但总觉得非得吃点什么才踏实。与现实中飞行技术的对比:飞机螺旋桨工作原理 一、工作原理 可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。显而易见β=α+φ。空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,合成后总空气动力为ΔR。ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。 必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。螺旋桨工作时。轴向速度不随半径变化,而切线速度随半径变化。因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。所以说螺旋桨是一个扭转了的机翼更为确切。 气流角实际上反映前进速度和切线速度的比值。对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。迎角变化,拉力和阻力矩也随之变化。用进矩比“J”反映桨尖处气流角,J =V/nD。式中D—螺旋桨直径。理论和 试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算: T=Ctρn2D4 P=Cpρn3D5 η=J?Ct/Cp 式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。是设计选择螺旋桨和计算飞机性能的主要依据之一。 从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。对飞行速度较低而发动机转速较高的轻型飞机极为不利。例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。 二、几何参数 直径(D):影响螺旋桨性能重要参数之一。一般情况下,直径增大拉力随之增大,效率随之提高。所以在结构允许的情况下尽量选直径较大的螺旋桨。此外还要考虑螺旋桨桨尖气流速
四轴飞行器作品说明书
四轴飞行器作品说明书
四轴飞行器在各个领域应用广泛。相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。校正加速度计采用最小二乘法。计算姿态采用姿态插值法、需要对比这三种方法然后选出一种来应用。控制姿态采用欧拉角控制或四元数控制。 关键词:四轴飞行器;姿态;控制
1.引言 (1) 2.飞行器的构成 (1) 2.1.硬件构成 (1) 2.1.1.机械构成 (1) 2.1.2.电气构成 (3) 2.2.软件构成 (3) 2.2.1.上位机 (3) 2.2.2.下位机........... . (4) 3.飞行原理........... ................................ (4) 3.1. 坐标系统 (4) 3.2.姿态的表示 (5) 3.3.动力学原理 (5) 4.姿态测量........... ................................ (6) 4.1.传感器校正 (6) 4.1.1.加速度计和电子罗盘 (6) 5.姿态控制 (6) 5.1.欧拉角控制 (6) 5.2.四元数控制 (7) 6.姿态计算 (7) 7.总结 (8) 参考文献 (9)
1.引言 四轴飞行器最开始是由军方研发的一种新式飞行器。随着MEMS传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。 目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低。 本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。 2.飞行器的构成 四轴飞行器的实现可以分为硬件和软件两部分。比起其他类型的飞行器,四轴飞行器的硬件比较简单,而把系统的复杂性转移到软件上,所以本文的主要内容是软件的实现。 2.1.硬件构成 飞行器由机架、电机、螺旋桨和控制电路构成。 2.1.1.机械构成 机架呈十字状,是固定其他部件的平台,本项目采用的是碳纤维材料的机架。电机采用无刷直流电机,固定在机架的四个端点上,而螺旋桨固定在电机转子上,迎风面垂直向下。螺旋桨按旋转方向分正桨和反桨,从迎风面看逆时针转的为正桨,四个桨的中心连成的正方形,正桨反桨交错安装。 CA D设计机架如图:
四轴飞行器螺旋桨
名称:正反桨1045桨螺旋桨 规格:直径:10英寸螺矩:4.5英寸 颜色:黑、红、蓝、黄、绿、橙 桨直径:25.4CM 中心孔正面孔径:6MM 中心孔反面孔径:9MM(此孔可套入下面桨垫)中心座厚度:6mm 重量:7g(约/单只) 变距环组:x 7(每组2个),桨垫分别是2MM 3MM 4MM 5MM 6MM 7.8MM 描述:适配不同桨夹尺寸的环。适合四旋翼飞行器或多旋 翼飞行器使用。适合于本店的所有多旋翼飞行器。
正反桨的区分: 正桨在桨片上以“L”字母标注,从正桨片正面看以逆时针旋转拨动气流。 反桨在桨片上以“R”字母标注,从反桨片正面看以顺时针旋转拨动气流。 正桨和反桨在四轴上的应用原理:
厂家的四轴多旋翼飞行器是安装4个桨片,假如说都用一个逆时针转动的话,4个桨片都会产生一个逆时针旋转的自旋扭力,使得被载体向右自旋。所以四轴为了抵消这种自旋就用2个正桨2个反桨,2个顺时针2个逆时针的桨片按照循环排列,一对桨片往左扭,一对桨片往右扭来抵消掉桨片转动时发出的自旋扭力,使之均衡。 3S电池下;KV900-1000的电机配1060或1047浆,9寸浆也可 KV1200-1400配9050(9寸浆)至8*6浆 KV1600-1800左右的7寸至6寸浆 KV2200-2800左右的5寸浆 KV3000-3500左右的4530浆 2S电池下;KV1300-1500左右用9050浆 KV1800左右用7060浆 KV2500-3000左右用5X3浆 KV3200-4000左右用4530浆 浆的大小与电流关系: 因为浆相对越大在产生推力的效率就越高 例如:同用3S电池,电流同样是10安(假设) 用KV1000配1060浆与KV3000配4530浆它们分别产生的推力前者是后者的两倍。 机型与电机、浆的关系: 一般来说:浆越大对飞机所产生的反扭力越大,所以浆的大小与机的翼展大小有着一定关系,但浆与电机也有着上面所讲的关系。 例如用1060浆,机的翼展就得要在80CM以上为合适,不然的话机就容易造成反扭;又如用8*6的浆翼展就得在60以上。 再比如:用4530浆做翼展1米以上机行否?是可以,但飞机飞起来会很耗电,因为翼展大飞行的阻力大,而4530浆产生的推力相对情况下小(上面浆的大小与电流关系有讲到)。 所以模友在选择玩什么机型的时候就要注意这4者的关系,尤其是新手选择机型,一定要看这机型翼展大小选择配电机、浆、电池,特别要注意的是,不能用大浆配高KV的电机,否则烧电机还影响了电池,有可能连电调也烧掉。
临近空间飞行器
临近空间飞行器 一、临近空间飞行器的基本概念 临近空间(Near space) 通常是指距地表20~100千米处的空域,其下面的空域我们通常称为“天空”,是传统航空器的主要活动空间;其上面的空域就是我们平常说的“太空”,是航天器的运行空间。临近空间区域包括大气平流层(高度12-50千米)的大部分区域,中间大气层区域(高度50-80千米)和部分电离层区域(高度60-100千米)。 临近空间的显著特点包括:空气相对稀薄;环境压力低;环境温度变化复杂;臭氧和太阳辐射强;20-40千米区域平均风速最小。目前“临近空间”这个词只是一个学术概念,还没有公认的“官方定义”,对其的称呼也有很多种,如“近空间”、“亚轨道”或“空天过渡区”,美国也有人称之为“横断区”,而我国学术界过去则有“亚太空”、“超高空”、“高高空”等称呼。 临近空间飞行器是指高于普通飞行器飞行空间,而低于轨道飞行器运行空间区域的飞行器,主要包括能在近空间作长期、持续飞行的低动态飞行器,和具有高动态(马赫数大于1.0)的亚轨道飞行器或在临近空间飞行的高超声速巡航飞行器。 临近空间飞行器具有航空、航天飞行器所不具有的作用,特别是在通信保障、情报收集、电子压制、预警等方面极具发展潜力。 二、临近空间飞行器的特点 临近空间飞行器的应用前景十分广阔。在民用上可以进行高空大气研究、天气预报、环境及灾害监测、交通管制监测、电信和电视服务。在军事上可用于国界巡逻、侦察、通信中继、电子对抗等,在空间攻防和信息对抗中能发挥重要作用,进一步促进空天一体化的发展,
特殊的战略位置将为未来战争开辟了一个新的战场。其发展和应用将可能对未来整个作战体系和作战思维产生重大而深远的影响。 临近空间飞行器在应用上不同于一般的飞机和卫星,具有一些显著的特点,主要表现在以下几个方面: (1)与传统飞机相比,临近空间飞行器持续工作时间长。传统飞机的留空时间以小时为单位,临近空间飞行器的留空时间则以天为单位,目前正在研制的临近空间平台预定留空时间长达6个月,规划中的后续平台预定留空时间可达1年以上,易于长期、不间断地获得情报和数据,可对紧急事件迅速做出响应,而且人员保障少、后勤负担轻。 (2)覆盖范围广。临近空间飞行器的飞行高度在传统飞机之上,其侦察覆盖范围比传统飞机要广得多。 (3)生存能力强。气球或软式飞艇的囊体采用非金属材料而且低速运行,雷达和热反射截面很小,传统的跟踪和瞄准办法不易发现。与传统飞机相比,气球或软式飞艇的缺点是:充灌氦气的时间较长,在充气时需要保持稳固,有时还需要占用机库;在放飞、通过平流层上升、下降、回收和放气的过程中,由于其庞大的体积,容易受到风和湍流的影响。 (4)飞行高度适中。临近空间飞行器由于飞行高度介于飞机和卫星之间,因此在对地观察分辨率、电子对抗效果等方面优于卫星,而在通信服务覆盖范围、侦察视场范围等方面优于飞机。 (5)部署速度快、机动能力强。卫星的发射准备周期长,约40天,机动变轨次数有限。而临近空间飞行器结构简单,可大量部署,准备时间往往不超过一天,实时性好,威胁作用大。(6)低速临近空间飞行器大量采用全复合材料,没有大尺寸高温部件,具有低可探测性,而且飞行速度较高,目前世界上尚缺乏有效对抗临近空间飞行器的武器。 (7)低速临近空间飞行器飞行高度高,视场大;高速临近空间飞行器不仅飞行高度高,而且速度快,突防能力强。因而临近空间飞行器在战场信息控制和快速精确打击等方面具有很强的威慑作用。可实现局部快速响应和持久部署。一些低速临近空间飞行器处于区域气流稳定,平均风速小,可实现红外凝视的监视侦察,在局部区域的时间分辨率方面,是飞机和卫星不可比拟的。 (8)载荷能力强,效费比高。临近空间飞行器可作为卫星廉价的替代品。用于中继通信和侦察。临近空间飞行器的制作和使用费用远低于现有的无人驾驶飞机和卫星。飞行平台的载荷能力大,飞行器可返回,可重复使用,载荷可维修,可更换。与卫星相比,临近空间飞行器具有效费比高、机动性好、有效载荷技术难度小、易于更新和维护。此种飞行器距目标的距离一般只是低轨卫星的1/10~1/20,可收到卫星不能监听到的低功率传输信号,容易实现
螺旋桨原理及其应用
论文题目: 直升飞机螺旋桨原理及其应用 北京四中高一吴士荀 北京四中高一唐明昊 北京四中高一杨宗翰 北京四中高一赵铂琛 指导教师: 北京四中魏华 2014年5月
摘要 螺旋桨的出现加快了世界前进的脚步,给我们带来了各种方便与快捷。我和组员就是三个不折不扣的航空迷。在生活中,各种媒体里,我们看到了螺旋桨的神奇效用,一个简单的扇叶竟能够使一架几吨重的庞然大物在空中轻盈飞翔。身为中学生的我们能否通过自己的聪明才智研究其中的奥妙呢?于是我们运用了资料查询法、小组讨论法等方法进行了研究。经过了一学年的研究,我们初步探究了直升飞机螺旋桨的原理及其应用。 目录:
一、问题的提出 二、研究目的 三、直升飞机及螺旋桨概述 四、感想体会 五、参考资料及鸣谢 一、问题的提出 背景: 在当今社会中,螺旋桨扮演着越来越重要的角色。从我们身边的遥控
飞机,到翱翔在空中的各种飞行器无一不归功于螺旋桨的发明。然而,看似简单的扇叶是如何实现了多年来人类飞行的梦想呢?本组本着 对科学的好奇以及对知识的渴望,进行了本课题的研究,意在探究螺 旋桨的原理及其应用以及它潜在的发展空间以及存在问题,为罗湘江 的进一步发展提出可行化建议。 二、研究目的 1.目的与意义:研究螺旋桨原理及其应用,明确其发展方向以及现存的问题。 2.必要性:螺旋桨的应用将在人们的生活中日益普遍,在不久的将来,螺旋桨也将存在于我们的身边,因此有必要了解它的原理及其应用,并研究它的现存问题。 3.可行性:从中学生所掌握的知识出发,并向大学知识拓展,运用各类知识学习螺旋桨的原理及其应用,探究其发展方向,分析现存问题。 三、直升飞机及螺旋桨概述 (一)直升飞机 1.简介 直升机:直升机的最大时速可达300km/h以上,俯冲极限速度近 400km/h,实用升限可达6000米(世界纪录为12450m),一般航程可
临近空间飞行器表面波等离子体推进新原理
临近空间飞行器表面波等离子体推进新原理 荆志波,江滨浩 哈尔滨工业大学电气工程系,哈尔滨(150001) E-mail: jingzhiboqust@https://www.360docs.net/doc/4111204193.html, 摘要:针对临近空间大气容易实现放电形成等离子体的天然环境条件,根据流体力学伯努利原理、等离子体中的粒子和波之间共振效应和表面波与定向运动等离子体流之间存在着自恰的耦合关系,本文提出临近空间飞行器表面波等离子体推进的新原理。该原理具有响应速度快、推力可调、机动性强等特点。 关键词:临近空间;伯努利原理;表面波等离子体;波-粒子共振效应 中图分类号:O53 1引言 近年来,临近空间特殊的战略价值受到了许多国家的重视。飞艇类浮空器具有驻空时间长、载重量大、生存能力强、预警功能强、侦察视野广、效费比高等优点,各航天大国纷纷开展以飞艇为主的浮空器平台的研究和应用[1]。飞艇所处的平流层环境比较特殊和复杂,一方面大气稀薄,另一方面风速、风向变化频繁[2]。面向我国未来临近空间信息作战平台的需求,为了使飞艇以较高精度实现定点悬停或低速飞行,从而完成较长时间(半年以上)的预警侦察任务,要求推进装置能克服大气阻力,并能根据周围气流变化情况实现推力的连续可调;升浮控制装置能以较快的响应速度使飞艇升降及时避开强气流区;姿控装置能以较高的精度调整飞艇的姿态,以精确调节飞艇的航向及太阳能电池帆板的接收角度。 目前,美国、日本和以色列在平流层飞艇的推进技术等关键技术研究方面处于世界领先地位[3]。所设计的飞艇几乎都采用电动螺旋桨作为主推进器来抵消风力,实现位置修正、姿态调整和巡航飞行;飞艇升浮控制则都是通过调节气囊中主、副舱之间氦气和空气的体积比来实现。如美国洛克希德·马丁公司的高空飞艇采用了四台电动马达驱动的推力矢量大型双螺旋桨作为推进器[4];日本与美国合作于2005年升空的高空通信平台上的充氦飞艇则采用了由尾部和两舷的螺旋桨提供的驱动力来做位置保持[5];以色列飞机工业公司(IAI)研制的巨型侦察飞艇也已经在21km高度试飞成功,通过艇身后部的电动机带动螺旋桨进行巡航飞行[6]。最近,NASA从未来发展的角度发表了论证报告[7],提出在“临近空间”的相对较低高度采用螺旋桨推进比较合适,但是当进一步提高工作高度时使用等离子推进器就相对比较合适,图1表明等离子体推进的适用空域要高于电动螺旋桨的高度,其根本原因在于,当海拔越来越高时,大气变得越来越稀薄,容易实现电离,采用空气动力学的方式推进不如等离子体推进有效。 驻空类临近空间飞行器的主要特点有以下三个: (1)翼展大、表面积大,因而其表面覆盖的太阳能电池帆板供给的电能相对充足,如美国MDA公司设计的试验型高空飞艇表面积约23550m2,提供的最大电功率为75kW,因此其产生的电能供飞艇内部的有效载荷使用后还有较多的剩余[4]。 (2)周围的空气介质非常稀薄,如在30km高空,气压约1200Pa;在40km高空,气压则降到约280Pa[8];低气压条件下容易放电形成等离子体。 (3)相比大气层内飞行器,其工作时间很长,通常达半年以上,平台自重很大。
第六届华中地区大学生数学建模邀请赛问题1.飞行器空间坐标修正
第六届华中地区大学生数学建模邀请赛 题目:飞行器空间坐标修正 【摘要】 飞行器的导航问题越来越受到人们的重视,它对精度的要求非常之高,我国通过激光引导和北斗导航系统来提高导弹等的定位导航精度然而由于噪声干扰和仪器精度问题使得飞行器的坐标观测值存在一定误差,随着时间的推移,误差逐渐积累会变得越来越大,这会严重影响飞行器的导航精度,因此修正坐标误差非常必要。 本文在分析了各物理量的关系的基础上,经过严密地推导,得出各个轴方向上的位移与其对应速度的修正之后的函数关系,据此建立了相关的数学模型并通过评价说明了模型的合理性和科学性。 对于问题一:噪声信号的干扰对飞行器空间坐标的观测值造成误差,通常采用联邦卡尔曼滤波的方法或者通过坐标变换用雅各比行列式来修正噪声干扰带来的误差。 对于问题二:另外观测数据的仪器误差可以均值法或者迭代均值法来消减。 关键词:联邦卡尔曼,坐标变换,雅各比行列式,迭代均值
目录 一问题重述 (3) 1.1问题背景 (3) 1.2问题提出 (3) 二模型假设 (4) 三符号说明与名词解释 (4) 四问题分析 (4) 4.1问题一分析 (4) 4.2问题二分析 (6) 五模型建立与求解 (7) 5.1问题一模型 (7) 5.2问题二模型 (11) 六模型评价 (13) 七模型的改进 (13) 参考文献 (14)
一问题重述 1.1问题背景 飞行器的导航精度问题一直是航空航天领域研究的重要课题,惯性导航系统是一种不依赖于任何外部信息的自主式导航系统,在航空航天领域起着越来越重要的作用。由于其系统结构误差、惯性测量部件误差、标度系数误差等因素的影响,惯性导航系统的积累误差随着时间的推移而逐渐增大,这一问题严重影响到航空航天技术的发展。目前关于定位精度的研究成果主要是从物理技术(例如红外测距)方面来提高定位的精度,近年来,围绕定位坐标精度问题的相关研究也渐渐展开。因此进一步研究飞行器空间坐标修正方法有重要的理论意义和应用价值。本题的目标是利用数学的方法对飞行器的误差进行修正,并利用结果进行飞行器的仿真。 1.2问题提出 某一观测站测得飞行器空间位置(假设观测站为坐标原点)X(x、y、z),飞行器的飞行速度V(x轴、y轴、z轴),飞行器与观测站之间的偏向角α,俯仰角θ以及观测数据的时间间隔t。所给的各项数据均含有一定的误差,其中观测站的坐标 (0,0,0)不含误差,飞行器的坐标(观测值)可能含有较大误差。请根据所给数据进行如下工作:问题一:飞行器坐标的数据为观测值,由于电子仪器的精度和噪声干扰等,含有一定的误差波动,建立数学模型对飞行器坐标观测值的随机波动误差进行修正。 问题二:由于观测数据的仪器误差,飞行器坐标在长时间的飞行中,坐标数据的观测值由于误差的累积发生漂移,建立数学模型,对飞行器的坐标的这种误差进行修正。(提示:在短时间内,可以视为飞行器坐标含有一定的常量误差,或者飞行器的这种误差是线性变化的)。 问题三:结合具体的飞行器给出误差修正方案。
航空器和航天器分类
航空器是怎样分类的,各类航空器又是如何细分的?航天器是怎样分类的?各类航天器又是如何细分的? 答:一、航空器根据产生向上力的基本原理的不同,航空器可划分为两大类:轻于空气的航空器和重于空气的航空器,前者靠空气静浮力升空,又称浮空器;后者靠空气动力克服自身重力升空。 根据构造特点还可进一步分为下列几种类型:(1)轻于空气的航空器。分为气球和飞艇。轻于空气的航空器的主体是一个气囊,其中充以密度较空气小得多的气体(氢或氦),利用大气的浮力使航空器升空。①气球②飞艇(2)重于空气的航空器。重于空气的航空器。重于空气航空器的升力是由其自身与空气相对运动产生的,分为固定翼航空器、旋翼航空器、扑翼机以及倾转旋翼机.①固定翼航空器。固定翼航空器又分为飞机和滑翔机。飞机是最主要的、应用范围最广的航空器。它的特点是装有提供拉力或推力的动力装置,产生升力的固定,控制飞行姿态的操纵面;滑翔机与飞机的根本区别是,它升高以后不用动力而靠自身重力在飞行方向的分力向前滑翔,虽然有些滑翔机装有小型发动机(称为动力滑翔机),但主要是在滑翔飞行前用来获得初始高度。②旋翼航空器主要由旋转的产生升力,分为直升机和旋翼机。直升机的旋翼是由发动机驱动的,升力和水平运动所需的拉力都由旋翼产生。而旋翼机是一种利用前飞行时的相对气流吹动旋翼自转以产生升力的旋翼航空器。③扑翼机。扑翼机又名振翼机。它是人类早期试图模仿鸟类飞行而制造的一种航空器。它用像飞鸟翅膀那样扑动的翼面产生升力和拉力。④倾转旋翼机,倾转旋翼机是一种同时具有旋翼和固定翼,并在机翼两侧翼梢处各装有一套可在水平与垂直位置之间转动的旋翼倾转系统组件的飞机。 二、航天器是指在地球大气层以外的宇宙空间,基本按照天体力学的规律运动的各类飞行器,又称空间飞行器。航天器分为无人航天器和载人航天器。 按照各自的用途和结构形式,航天器还可以进一步细分。(1)无人航天器。无人航天器包括人造地球卫星和空间探测器。①人造地球卫星。人造地球卫星是数量最多的航天器。按照卫星的用途,又可分为科学卫星、应用卫星和技术试验卫星。②空间探测器。空间探测器是指对月球和月球以外的天体和空间进行探测的无人探测器,也称深空探测器。分为月球探测器以及行星和行星际探测器。(2)载人航天器。载人航天器分为载人飞机、空间站、航天飞机、空天飞机。①载人飞机。载人飞机是载乘航天员的航天器,又称宇宙飞船。按照运行方式的不同,分为卫星式载人飞船和登月载人飞船两类。②空间站。空间站是航天员在太空轨道上生活和工作的基地,又称轨道站和航天站③航天飞机。航天飞机是是世界上第一种也是唯一一种可重复使用的航天运载器,还是一种多用途的载人航天器④空天飞机。 1
螺旋桨飞机的基本分类
螺旋桨飞机的基本分类 螺旋桨飞机按发动机类型不同分为活塞式螺旋桨飞机和涡轮螺旋桨飞机。人力飞机和太阳能飞机通常都用螺旋桨推进,也属于螺旋桨飞机的范围。涡轮螺旋桨发动机的功率重量比,比活塞式发动机大2~3倍,在相同的重量下可提供更大的功率,燃油消耗率在速度较高时比活塞式发动机小,且可使用价格较低的煤油,故在600~800千米/时速度范围内的旅客机、运输机等大多为螺旋桨飞机。 按螺旋桨与发动机相对位置的不同,又分为拉进式螺旋桨飞机和推进式螺旋桨飞机。前者的螺旋桨装在发动机前面,“拉”着发动机前进;后者螺旋桨装在发动机之后,“推”着发动机前进。早期的飞机中曾有不少是推进式的,这种型式的缺点较多,螺旋桨效率不如拉进式高,因拉进式螺旋桨前没有发动机短舱的阻挡。此外在推进式螺旋桨飞机上难于找到发动机和螺旋桨的恰当位置,特别是装在机身上更困难。相反,在拉进式螺旋桨飞机上,发动机无论是装在机身头部或是装在机翼短舱前面都很方便。当装在机翼上时,螺旋桨后面的高速气流还可用来增加机翼升力,改善飞机起飞性能,因此拉进式飞机遂占据了统治地位。在少数大型飞机和水上飞机上,发动机多至8~12台以上,将发动机前后串置在短舱上,形成拉进和推进的混合型式。 螺旋桨飞机的结构特点 螺旋桨飞机的结构比较复杂。为了降低转速和提高螺旋桨效率,绝大多数发动机装有减速器。这类飞机的发动机装有滑油散热器。液冷活塞式发动机还装有冷却液散热器。桨毂和发动机均有流线型外罩,以减小阻力。螺旋桨旋转时产生一个反作用扭矩,大功率发动机的飞机常用较大的垂直尾翼或偏置垂直尾翼产生的力矩来加以平衡,也可以采用反向旋转的同轴螺旋桨来抵消反作用扭矩,如苏联的安22飞机。 现代的螺旋桨飞机多采用桨叶角可调的变距螺旋桨,这种螺旋桨可根据飞行需要调整桨叶角,提高螺旋桨的工作效率。由于螺旋桨在旋转时,桨根和桨尖的圆周速度不同,为了保持桨叶各部分都处于最佳气动力状态,所以把桨根的桨叶角设计成最大,依次递减,桨尖的桨叶角最小工作状态的桨叶是一根悬壁梁受力态势,为了增加桨根的强度,桨根的截面积设计为最大。 一架飞机上桨叶数目根据发动机的功率而定,有2叶、3叶和4叶的,也有5叶、6叶的。装于飞机头部的螺旋桨为拉力式螺旋桨,装于飞机后部的螺旋桨为推力式螺旋桨,还有既装有拉力式螺旋桨又装有推力式螺旋桨的飞机。 螺旋桨飞机的发展演化
四旋翼飞行器的姿态解算小知识点
1、惯性测量单元IMU(InertialMeasurement Unit) 姿态航向参考系统AHRS(Attitude and Heading Reference System) 地磁角速度重力MARG(Magnetic, Angular Rate, and Gravity) 微机电系统MEMS(Micro Electrical Mechanical Systems) 自由度维数DOF(Dimension Of Freedom) 无人驾驶飞行器UAV(Unmanned Aerial Vehicle) 扩展卡尔曼滤波EKF(Extended Kalman Filter) 无损卡尔曼滤波UKF(Unscented Kalman Filter) 惯性导航系统INS(Inertial Navigation System) 全球导航卫星系统GNSS(Global Navigation Satellite System) 天文导航系统CNS(Celestial Navigation System) 可垂直起降VTOL(Vertical Take-off and Landing) 2、常见的导航系统:惯性导航、天文导航、卫星导航、路标导航、无线电导航、推算导航、组合导航。 3、有两个基本坐标系:“地理”坐标系和“载体”坐标系。”地理”坐标系指的就是地球上的“东北天(ENU)”坐标系,而“载体”坐标系值的就是四轴自己的坐标系。 4、在“地理”坐标系中,重力的值始终是(0,0,1g),地磁的值始终是(0,1,x)。这些值就是由放置在四轴上的传感器测量出来的。 5、“地理”坐标系和“载体”坐标系是两个不同的坐标系,需要转化。转化的方法就是坐标系的转换,目前有三种方式:四元数(q0123)、欧拉角(yaw(Z轴)/ pitch(Y轴)/roll(X 轴)属于其中一种旋转顺序Z-Y-Xà航空次序欧拉角)、方向余弦矩阵(9个系数)。 6、所谓的姿态,就是公式+系数。比如:欧拉角公式和欧拉角的系数(翻滚、倾仰、偏航) 7、姿态的数据来源有5个:重力、地磁、陀螺仪、加速度计、电子罗盘。其中前两个来 自“地理”坐标系,后三个来自“载体”坐标系。 8、导航的基本原则就是保证两个基本坐标系的正确转化,没有误差。只有实现了这个原则,载体才可以在自己的坐标系中完成一系列动作而被转换到地理坐标系中看起来是正确的。为了达到这个目标,需要对两个坐标系进行实时的标定和修正。因为坐标系有三个轴,偏航yaw修正由电子罗盘(基于载体)、地磁(基于地理)对比修正误差补偿得到。倾仰pitch 和翻滚roll上的修正由加速度计(基于载体)、重力(基于地理)对比修正误差得到。在完成了基本原则的基础之后,即保证两个坐标系的正确转化后,利用基于载体上的陀螺仪进行积分运算,得到基于载体坐标系的姿态数据,经过一系列PID控制,给出控制量,完成基 于载体坐标系上的稳定控制后,反应到地理坐标系上的稳定控制,从而达到我们观察到的定高、偏航、翻滚、倾仰等动作。 对于上述论述可以看出,导航姿态从理论上讲只用陀螺仪是可以完成任务的。但是由于陀螺仪在积分过程中会产生误差累计,外加上白噪声、温度偏差等会造成导航姿态的解算随着时