无线鼠标原理简介
无线鼠标原理
无线鼠标原理简介:
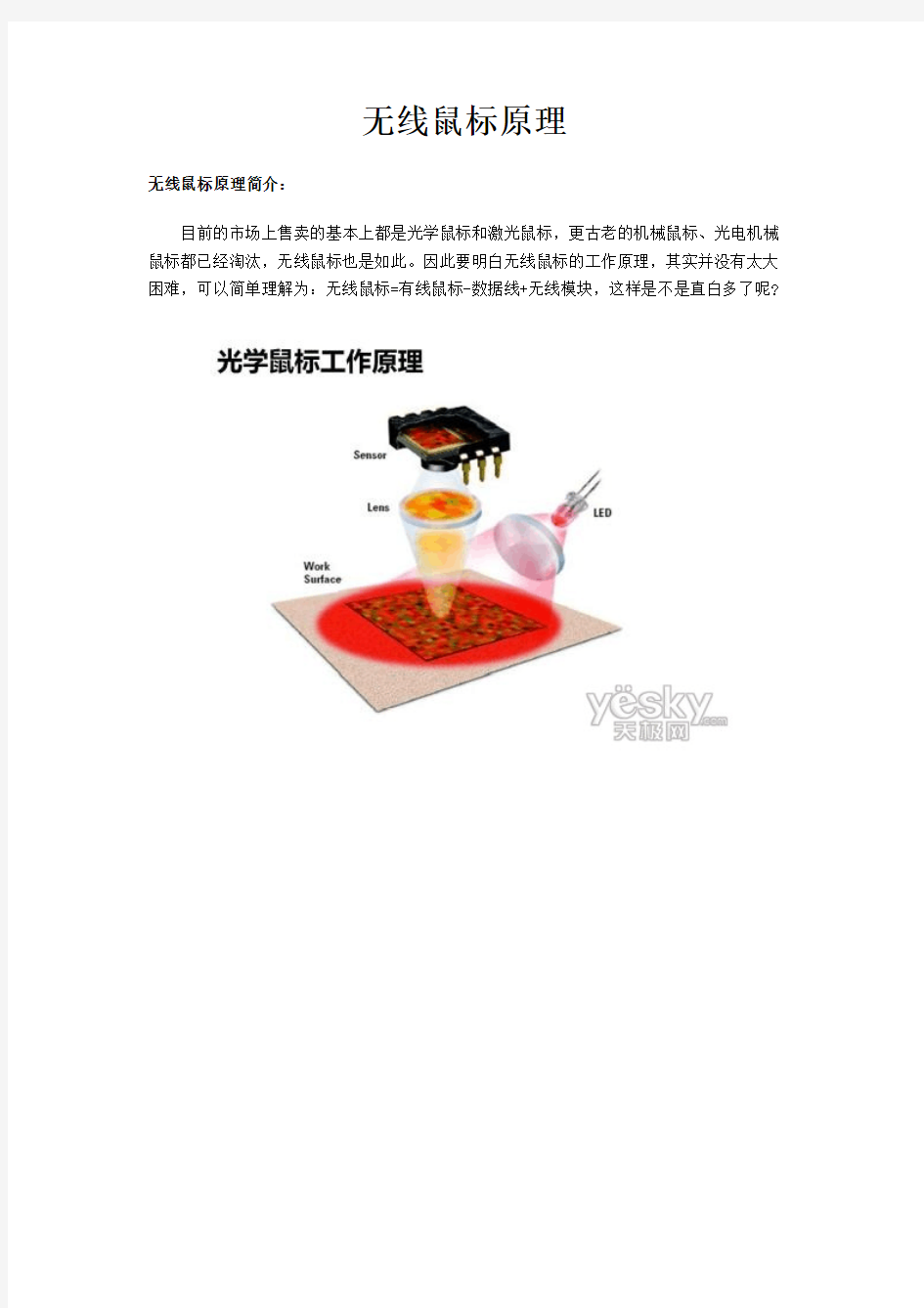
目前的市场上售卖的基本上都是光学鼠标和激光鼠标,更古老的机械鼠标、光电机械鼠标都已经淘汰,无线鼠标也是如此。因此要明白无线鼠标的工作原理,其实并没有太大困难,可以简单理解为:无线鼠标=有线鼠标-数据线+无线模块,这样是不是直白多了呢?
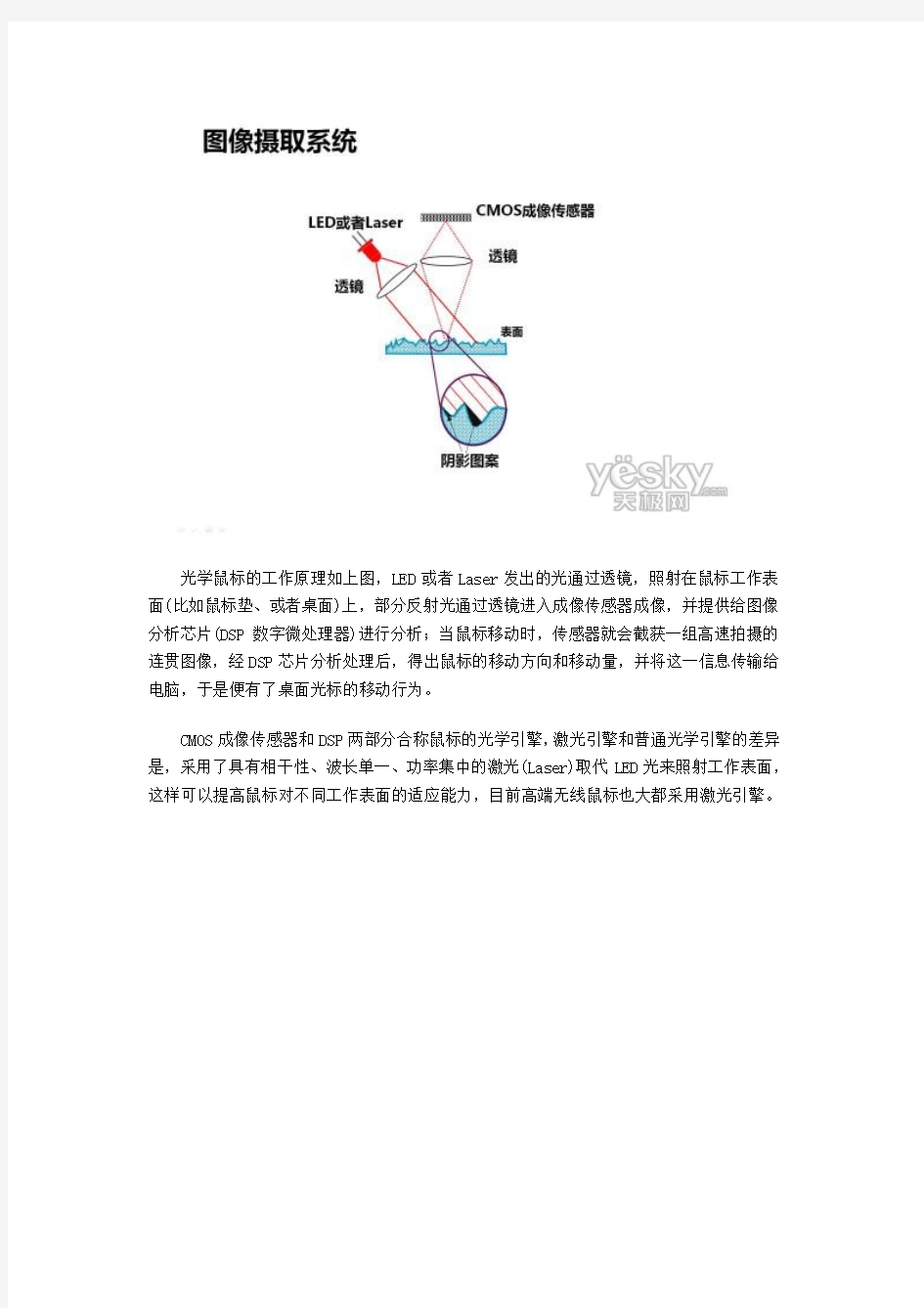
光学鼠标的工作原理如上图,LED或者Laser发出的光通过透镜,照射在鼠标工作表面(比如鼠标垫、或者桌面)上,部分反射光通过透镜进入成像传感器成像,并提供给图像分析芯片(DSP 数字微处理器)进行分析;当鼠标移动时,传感器就会截获一组高速拍摄的连贯图像,经DSP芯片分析处理后,得出鼠标的移动方向和移动量,并将这一信息传输给电脑,于是便有了桌面光标的移动行为。
CMOS成像传感器和DSP两部分合称鼠标的光学引擎,激光引擎和普通光学引擎的差异是,采用了具有相干性、波长单一、功率集中的激光(Laser)取代LED光来照射工作表面,这样可以提高鼠标对不同工作表面的适应能力,目前高端无线鼠标也大都采用激光引擎。
图中NRF字样的小方块就是2.4G无线芯片
其实无线鼠标和传统有线鼠标基本上是一样的,区别主要集中在最后一步的数据传输方式上,有线鼠标通过PS/2或者USB接口的数据线传输信息,而无线鼠标则采用红外、27MHz、2.4GHz和蓝牙等无线传输技术发送数据,摒弃了数据线,使用起来“无牵无挂”,自然更加方便。
无线传输技术介绍:
无线技术根据不同的用途和频段被分为不同的类别,其中包括蓝牙、Wi-Fi (IEEE 802.11)、Infrared (IrDA)、ZigBee (IEEE 802.15.4)等等多个无线技术标准,但市场上产品最多、消费者接触最广的,也仅有27Mhz、2.4G和蓝牙无线鼠标共三类。
27 MHz RF技术
27 MHz RF指的是使用27 MHz ISM(工业、科学、医学)无线频率带的一项技术,输出功率<54dBuV/m。在这个频率带中有四个全球范围的频道:其中两个用于无线键盘,另外两个用于无线鼠标;但是27Mhz最远有效传输距离仅为6英尺(182.88cm),而且容易发生干扰和撞车情况,另外。27MHz键鼠产品仅支持单向传输(仅支持鼠标的发射端向信号接收器发送信号),为保证传输速率还必须连续工作,因此功耗也比较大,除此之外,还存在27MHz技术无线安全级别较低、传输带宽有限、频段并非免费资源等不利指出,所以目前已经完全淘汰,不过市面上仍旧有部分采用这一技术的产品售卖,大家购买的时候一定要仔细小心。
2.4G无线技术
2.4G技术已经成为如今主流
2.4G无线技术全称“2.4Ghz 非联网解决方案”,解决了27Mhz功率大、传输距离短、同类产品容易出现互相干扰等缺点。2.4G无线技术使用的频率是2.4-2.485GHz ISM 无线频段,该名称就是由此而来,该频段在全球大多数国家均属于免授权免费使用,可以大幅节省成本,这为产品的普及扫清了最大的障碍。
相比于27Mhz的低传输效率,2.4G传输效率达到了2Mbps,接收端和发射端之间并不需要连续性工作,从而大大降低了功耗、延长电池续航时间。2.4G技术还采用了自动调频技术,接收端和传输端能够找到可用频段,彻底解决27Mhz无线频段容易出现互相干扰的现象。此外,更重要的是2.4G RF无线技术为双向传输模式,避免27Mhz单向传输容易出现信号断续的情况。正是由于有了这些改进,而且成本大大降低,2.4G产品才能成为如今的无线键鼠主流。
蓝牙技术
潜力巨大的蓝牙无线技术
“蓝牙”技术是由一家成立于1998年9月的私营非牟利组织Special Interest Group(简称SIG)制定的一个标准,SIG组织本身并不制造、生产或销售任何蓝牙设备。蓝牙使用的频段和2.4G RF一致,均为在大多数国家免费、无授权的2.4-2.485GHz ISM(工业、科学、医学)之间,但蓝牙技术在普通2.4G无线技术上增加了自适应调频技术(adaptive frequency hopping,AFM ),实现全双工传输模式,并实现1600次/秒的自动调频。此外,该技术能够使蓝牙设备的接收方和传输方两者以1Mhz为间隔,在其划分的79个子频段上互相配对。不过蓝牙由于成本上比2.4G技术高,所以主要使用在高端无线鼠标上,产品也比较少,不过比较有发展潜力。
键盘鼠标术语专业解析
键鼠产品专业术语全面解析 前言:键盘鼠标是大家每天接触最多的电脑配件之一,作为最主要的输入工具,键鼠早已是每部电脑不可或缺的一部分。另外,还有为数不少的外设爱好者,喜欢各种精美的键鼠,常常活跃在外设论坛。于是,我们经常听到DPI、FPS等等关于键鼠的术语,到底它们代表什么意思呢?今天我们就一起来次大充电吧! 一、各类鼠标引擎工作原理 传统光学鼠标的工作原理 传统光学鼠标工作原理示意图
光学跟踪引擎部分横界面示意图 光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。 光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。 什么是激光鼠标? 学过物理学的朋友都知道,光具有波粒二象性,干涉和衍射特性就是激光鼠标产生的灵感和起源。激光鼠标其实也是光电鼠标,只不过是用激光代替了普通的LED光.好处是可以通过更多的表面,因为激光是Coherent Light(相干光),几乎单一的波长,即使经过长距离的传播依然能保持其强度和波形;而LED光则是Incoherent Light(非相干光)。 激光鼠标传感器获得影像的过程是根据,激光照射在物体表面所产生的干涉条纹而形成的光斑点反射到传感器上获得的,而传统的光学鼠标是通过照射粗糙的表面所产生的阴影来获得。因此激光能对表面的图像产生更大的反差,从而使得“CMOS成像传感器”得到的图像更容易辨别,提高鼠标的定位精准性。
罗技“DARK FIELD FIELD””无界激光引擎 罗技“DARK FIELD”无界激光引擎 罗技Darkfield无界技术采用暗视野显微来探测表面上的微观颗粒和微小的划痕,而不是追踪表面本身。与我们的眼睛能够看清夜晚的天空一样,鼠标的传感器将洁净的玻璃视为有着许多亮点的黑色背景,而这些亮点就是灰尘。然后,传感器能够通过这些点的运动精确追踪鼠标的移动。(《真正征服玻璃!罗技09新旗舰鼠标视频评测》) 微软蓝影引擎的技术原理:
差速器和主减速器结构和工作原理
差速器和主减速器结构和工作原理 内容简介:发动机的动力经过变速器输出后,必须经过主减速器和差速器才能传递车轮,对于前轮驱动的汽车,如我们常见的轿车,主减速器和差速器设计在变速器壳体内;对于后轮驱动的汽车,如客车和货车,主减速器和差速器安装在后轿内 发动机的动力经过变速器输出后,必须经过主减速器和差速器才能传递车轮,对于前轮驱动的汽车,如我们常见的轿车,主减速器和差速器设计在变速器壳体内;对于后轮驱动的汽车,如客车和货车,主减速器和差速器安装在后轿内。 一主减速器 主减速器的作用将变速器输出的动力再次减速,以增加转矩,之后将动力传递给差速器。主减速器的类型: (1)单级主减速器:大部分汽车的主减速器为单级主减速器,减速型式为普通斜齿轮式或锥形齿轮式: 锥形齿轮式主减速器图 其中锥形齿轮式主减速器如图所示,广泛的应用于后驱汽车的后轿中,变速器输出动力经过传动轴传给主动锥齿轮,经从动锥齿轮减速后传给差速器。
普通斜齿轮式主减速器应用于前驱汽车的变速器中。 注:对于前驱汽车的变速器中的主减速器,如果发动机在机舱在横置,则主减速器为普通斜齿轮式;如果发动机在机舱内纵置,则主减速器为锥形齿轮式,如桑塔纳、帕萨特等。 (2)双级主减速器:在重型货车上,常采用双级主减速器,如下图所示: 双级主减速器结构图 第一级为锥形齿轮减速,第二级为普通斜齿轮减速。 二减速器: 1 差速器的作用: 汽车在直线行驶时,左右车轮转速几乎相同,而在转弯时,左右车轮转速不同,差速器能实现左右车轮转速的自动调节,即允许左右车轮以不同的转速旋转。 2 差速器的组成结构:
差速器结构图 1-差速器壳轴承;2和8-差速器壳体;3和5-调整垫片;4-半轴齿轮(两个);6-行星齿轮(两个或四个);7-主减速器从动锥齿轮;9-行星齿轮轴。 3 差速器的工作原理和工作状态: 行星齿轮的自转:差速器工作时,行星齿轮绕行星齿轮轴的旋转称为行星齿轮的自转; 行星齿轮的公转:差速器工作时,行星齿轮绕半轴轴线的旋转称为行星齿轮的公转; (1)汽车直线行驶时,主减速器的从动锥齿轮驱动差速器壳旋转,差速器差驱动行星齿轮轴旋转,行星齿轮轴驱动行星齿轮公转,半轴齿轮在行星齿轮的夹持下同速同向旋转,此时,行星齿轮只公转,不自动,左右车轮和转速等于从动锥齿轮的转速。 (2)汽车转弯时,行星齿轮在公转的同时,产生了自转,即绕行星齿轮轴的旋转,造成一侧半轴齿轮转速的增加,而加一侧半轴齿轮转速的降低,两侧车轮以不同的转速旋转。此时,一侧车轮增加的转速等于另一侧车轮减少的转速。 (3)当将两个驱动轮支起后,车轮离地,如果我们转一侧的车轮,另一侧车轮反方向同速旋转,这时,差速器内的行星齿轮只自转,不公转,两侧半轴齿轮以相反的方向旋转,从而带动两侧车轮反方向同速旋转。
限滑差速器功能原理介绍(精.选)
汽车在弯道行驶,内外两侧车轮的转速有一定的差别,外侧车轮的行驶路程长,转速也要比内部车轮的转速高,这个时候就需要差速器来调节。今天呢,我们就来谈谈差速器的原理,并对限滑差速器进行一些详细的介绍。 ●差速器功能以及原理 顾名思义,“差速器”就是用来让车轮转速产生差异的,在转弯的情况下可以使左右车轮进行合理的扭矩分配,来达到合理的转弯效果。当发动机的动力经离合器、变速器、传动轴,经过了驱动桥上减速器的减速增矩之后,就要面临左右车轮的扭矩的分配,实现左右车轮的不同速度,使两边车轮尽可能以纯滚动的形式不等距行驶,减少轮胎与地面的摩擦,这就是所谓的“差速”过程。
那么这个过程是如何实现的呢?首先我们来看看普通差速器的构成。差速器主要由行星齿轮、齿轮架以及左右半轴齿轮构成。在传动轴和驱动桥的结合点上,我们能看到一个半径比较大的从动齿轮,由于输入轴主动齿轮半径比较小,因此动力从此齿轮传递到半径比较大的从动齿轮的过程中就能实现一个减速增矩的过程。
接下来减速器从动齿轮带动着行星齿轮架一起运转,由于左右输出轴和行星齿轮架是相连的,因此左右输出轴会跟着一起转动,而左右半轴齿轮就会跟着一起运转,而实现“差速”的关键就是两个和左右半轴齿轮相垂直的行星齿轮。这两个行星齿轮和左右车轮都咬合着,齿轮咬合方式能够让左右两个齿轮达到一个互相抵制的效果。
当汽车直线行驶的时候,左右半轴齿轮的扭矩和转速都是相同的,因此和行星齿轮结合的时候左侧和右侧能够互相抵消,这个时候行星齿轮是不运动的。遇到转弯情况,内侧车轮要比外侧车轮受到的阻力大,这个时候左右半轴齿轮的扭矩不同,就会导致行星齿轮的转动,行星齿轮能给内侧齿轮一个阻力扭矩实现减速,同时也能给外侧齿轮增速,这样外侧齿轮比内侧齿轮的转速快,实现了顺利的转弯。 ●限滑差速器实际意义 普通差速器有一种弊端,那就是由于车轮悬空而导致空转,一旦发生类似的情况,差速器将动力源源不断的传给没有阻力的空转车轮,车辆不但不能向前运动,大量的动力也会流失。这时候就需要一种差速器来解决这样的情况,也就是本节我们将要介绍的限滑差速器。 限滑差速器 限滑差速器的英文简写为LSD,是Limited Slip Differential的缩写,而LSD 的主要功能就是在工作时使左右车轮一同运转,而且将左右车轮的转速差控制在一定范围之内,以车辆保证正常的行进。根据实现方式以及机件结构的不同,LSD
差速器的结构及工作原理 图解
差速器的结构及工作原理(图解) 汽车差速器是一个差速传动机构,用来保证各驱动轮在各种运动条件下的动力传递,避免轮胎与地面间打滑。 当汽车转弯行驶时,外侧车轮比内侧车轮所走过的路程长(图D-C5-5);汽车在不平路面上直线行驶时,两侧车轮走过的曲线长短也不相等; 即使路面非常平直,但由于轮胎制造尺寸误差,磨损程度不同,承受的载荷不同或充气压力不等,各个轮胎的实际上不可能相等,若两侧车轮都固定在同一转轴上,两轮角速度相等,则车轮必然出现边滚动边滑动的现象。 差速器的作用 车轮对路面的滑动不仅会加速轮胎磨损,增加汽车的动力消耗,而且可能导致转向和制动性能的恶化。 若主减速器从动齿轮通过一根整轴同时带动两侧驱动轮,则两侧车轮只能同样的转速转动。为了保证两侧驱动轮处于纯滚动状态,就必须改用两根半轴分别连接两侧车轮,而由主减速器从动齿轮通过差速器分别驱动两侧半轴和车轮,使它们可用不同角速度旋转。
这种装在同一驱动桥两侧驱动轮之间的差速器称为轮间差速器。 在多轴驱动汽车的各驱动桥之间,也存在类似问题。为了适应各所处的不同路面情况,使各驱动桥有可能具有不同的输入角速度,可以在各驱动桥之间装设轴间差速器。 布置在前驱动桥(前驱汽车)和后驱动桥(后驱汽车)的差速器,可分别称为前差速器和后差速器,如安装在四驱汽车的中间传动轴上,来调节前后轮的转速,则称为中央差速器。
差速器可分为普通差速器和两大类。 普通差速器的结构及工作原理 目前国产轿车及其它类汽车基本都采用了对称式锥齿轮普通差速器。 对称式锥齿轮差速器由行星齿轮、半轴齿轮、行星齿轮轴(十字轴或一根直销轴)和差速器壳等组成12-13(见图D-C5-6)。(从前向后看)左半差速器壳2和右半差速器壳8用螺栓固紧在一起。主减速器的从动齿轮7用螺栓(或)固定在差速器壳右半部8的上。十字形行星齿轮轴9安装在差速器壳接合面处所对出的园孔内,每个轴颈上套有一个带有滑动轴承(衬套)的直齿圆锥行星齿轮6,四个行星齿轮的左右两侧各与一个直齿圆锥半轴齿轮4相啮合。半轴齿轮的轴颈支承在差速器壳左右相应的孔中,其内花键与半轴相连。与差速器壳一起转动(公转)的行星齿轮拨动两侧的半轴齿轮转动,当两侧车轮所受阻力不同时,行星齿轮还要绕自身轴线转动--自转,实现对两侧车轮的差速驱动。
2.4G无线鼠标及RF接收器原理图
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 2.4G无线鼠标及RF接收器原理图 12345678R2 VCC 150K VCCRESTSPI_MISO OSCO C5 OSCI N/A Y1 4MHz RA 1M C2 27P C3 27P主控电路RF电路VCC R5 VCC 150K RF_CS#R6RF_RSTC6 VCC 104R7 4.7~10RTVCCC7 10uF A150KAR1 20KANT U1 P55 P54 TCC GND SPI_MISO SPI_CLK SPI_MOSI RF_CS# LVD# PD#/ID DPI_BTN MBUTTON RBUTTON 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 P55 P54 TCC VDD NC VSS INT P50 P51 P52 P53 P60 P61 P62 P63 P64 P56 P57 RESET OSCI OSCO P77 P76 P75 P74 P73 P72 P71 P70 P67 P66 P65 32 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 P56 P57 REST OSCI OSCO PKT_FLAG IIC_SDA P75 P74 IIC_SCL SNS_CS# ZWH_C ZWH_A ZWH_B LBUTTON VCC C1 104 C4 104L2 * CF1 *ANT 2. 4GCF2 *VCC+1.8V C16 30PF VCC Y3 12M C15 30PF +1.8V C14 0. 1uF C8 2.2UF ANT R9 680K U3 R8 560R24 23 22 21 20 19C10 0.1uF TVCC C9 0.1uF BSE28A DICE B 1 2 3 4 U2 A0 A1 A2 VSS VCC WP SCL SDA 8 7 6 5 R4 10KXTALO VDD_IN GND CKPHA LDO_VOUT VDD_IOIIC_SCL IIC_SDA24C02(SOP-8)IF_VDD AMS_VDD FIFO_FLAG RXCLK PKT_FLAG GND1 2 3 4 5 6XTALI PLL_VDD VCO_VDD ANT GND RF_VDDSPI_MISO RESET_n SPI_CLK SPI_MOSI SPI_SS DIG_VDD18 17 16 15 14 13SPI_MISO RF_RST SPI_CLK SPI_MOSI RF_CS# +1.8V C11 10nF按键、编码电路S4 DPI_BTN S7 PD#/ID S1 LBUTTON S3 MBUTTON C RBUT TON S2 RIGHT MIDDLE LFETCOM B A7 8 9 10 11 12DPI +1.8V PD/ID 1/ 4
智能组网理论笔测试题
(A卷) 姓名:__________ 维护单位:_____________ 得分:_________ 一、单择题:(每空2分,共40分) 1.智能组网产品分为终端型产品和( D ); A.调测型产品 B. 设计型产品 C.售后型产品D. 服务型产品 2.同时支持和5G的协议是以下哪一种( B ); A. B. C. D. 3.WDS的全称是( C ); A.万能中继 B. 无线桥接 C.无线分布式系统 D. 无线中继 4.WIFI术语里里经常提到的SSID,指的是( A ); A. WIFI信号的名称 B. WIFI加密方式 C.支持的无线协议 D. 无线中继 5.用户家,75㎡面积、二室一厅,平时就用手机看看新闻、查查股票,有一个 TPLINK路由在客厅,但卧室无线信号不太稳定,以下哪种组网方式比较贴合该场景( A ); A.无线扩展器 B.有线桥接 C.电力设备D. AP面板 6.路由器包装盒上的300M代表的是( A ); A.最大无线速率 B. 最大RAM C.最大ROMD. 最大有线速率 7.能独立进行管理及配置,但无法统一管理的组网设备,一般我们称它为 ( A ); A.胖AP B. 瘦AP C. WIFI放大器 D. AC管理器 8.EOC组网是指基于( B )的组网技术; A.电力线B.同轴电缆 C.室内暗管 D. 无线协议 9.高速率、衰减大、穿墙性能弱的WIFI频段是( B ); A. . 5G
10.,单空间流,最大支持无线传输速率为( C ); A. 150M C. 433M D. 300M 11.我们一般将入户光纤所连接的ONU或天翼网关,称为家庭网络的( B )点; A.接入 B. 汇聚 C.分散D. 信息 12.判断无线网络质量的3个要素为:信号强度、信道干扰和( C ); A.加密方式 B. 信道频宽 C.多线程下载速率 D. 无线中继 13.无线频段下,完全互不干扰的信道有( C)个?; A. 14B. 13 C. 3 D. 11 14.协议支持的最大工作频宽是( C )M A. 20 B. 40 C. 150 D. 54 15.在用户家中进行无线网络评测时,对用户需连接使用的WIFI信号测试要求 为目标覆盖区域内95%以上的位置,接受信号场强值( B ),信噪比SMR 值应该大于-20db; A.≥-75dbm B. ≥-65dbm C.≥-45dbm D. ≥-35dbm 16.我们终端设备能搜索到的WIFI名称,在WIFI的术语里叫( A ) A. SSID B. 无线桥接 C.无线分布式系统 D. 无线中继 17.WIFI的工作原理特性以下说法中错误的是( C ); A.半双工 B. 时分系统 C.频分系统 D. 具备冲突避免机制 18.测试区域内无线信号场强为-55dbm,周围WIFI信号也较少,但测试下载速 率只有实际宽带带宽的40%( B ),此时要解决什么问题? A.干扰 B. 终端性能 C.组网设备性能 D. 提高带宽
差速器的结构及工作原理(图解)
差速器得结构及工作原理(图解) 汽车差速器就是一个差速传动机构,用来保证各驱动轮在各种运动条件下得动力传递,避免轮胎与地面间打滑。 当汽车转弯行驶时,外侧车轮比内侧车轮所走过得路程长(图D-C5-5);汽车在不平路面上直线行驶时,两侧车轮走过得曲线长短也不相等; 即使路面非常平直,但由于轮胎制造尺寸误差,磨损程度不同,承受得载荷不同或充气压力不等,各个轮胎得滚动半径实际上不可能相等,若两侧车轮都固定在同一刚性转轴上,两轮角速度相等,则车轮必然出现边滚动边滑动得现象。 差速器得作用 车轮对路面得滑动不仅会加速轮胎磨损,增加汽车得动力消耗,而且可能导致转向与制动性能得恶化。 若主减速器从动齿轮通过一根整轴同时带动两侧驱动轮,则两侧车轮只能同样得转速转动。为了保证两侧驱动轮处于纯滚动状态,就必须改用两根半轴分别连接两侧车轮,而由主减速器从动齿轮通过差速器分别驱动两侧半轴与车轮,使它们可用不同角速度旋转。
这种装在同一驱动桥两侧驱动轮之间得差速器称为轮间差速器。 在多轴驱动汽车得各驱动桥之间,也存在类似问题。为了适应各驱动桥所处得不同路面情况,使各驱动桥有可能具有不同得输入角速度,可以在各驱动桥之间装设轴间差速器。 布置在前驱动桥(前驱汽车)与后驱动桥(后驱汽车)得差速器,可分别称为前差速器与后差速器,如安装在四驱汽车得中间传动轴上,来调节前后轮得转速,则称为中央差速器。 差速器可分为普通差速器与防滑差速器两大类。 普通差速器得结构及工作原理 目前国产轿车及其它类汽车基本都采用了对称式锥齿轮普通差速器。 对称式锥齿轮差速器由行星齿轮、半轴齿轮、行星齿轮轴(十字轴或一根直销轴)与差速器壳等组成12-13(见图D-C5-6)。(从前向后瞧)左半差速器壳2与右半差速器壳8用螺栓固紧在一起。主减速器得从动齿轮7用螺栓(或铆钉)固定在差速器壳右半部8得凸缘上。十字
鼠标工作原理以及流程(版权所有)
2.4 GHz无线鼠标键盘接收器的设计 ?随着无线通信技术的不断发展,近距离无线通信领域出现了蓝牙、RFID、WIFI等技术。 这些技术不断应用在嵌入式设备及PC外设中。2.4 GHz无线鼠标键盘使用24~2.483 5 GHz无线频段,该频段在全球大多数国家属于免授权使用,这为无线产品的普及扫清了最大障碍。用户可迅速地进入与世界同步的无线设计领域,最大限度地缩短设计和生产时间,并且具有完美性能,能够替代蓝牙技术。 1 系统硬件结构 ?2.4 GHz无线鼠标键盘接收器主要实现鼠标、键盘等HID类设备在PC机上的枚举识别过程和接收无线鼠标或键盘发送的数据(包括按键值、鼠标的上下左右移动等),并将接收到的数据通过USB接口传送给PC机,实现鼠标键盘的无线控制功能。接收器主要由USB接口部分、MCU和无线接收部分组成。系统硬件框图如图l所示。 1. 1 USB接口部分 系统采用H OLT EK公司生产的8位USB多媒体键盘编码器HT82K95E作为系统核心。鼠标、键盘等HID类设备为低速设备,所以接收器要能同时实现鼠标和键盘数据同PC机的双向传输。MCU首先必须具有低速的USB接口,并且最少支持3个端点(包括端点O)。综合考虑选用了 HT82K95E作为本系统的主控芯片。 本系统的USB接口部分电路图如图2所示,其中电阻R100、R101、R102、R103、R104和电容C102、C114和C115用于EMC。由于鼠标和键盘设备属于从设备,所以应在USB-信号线上加1.5 k?的上拉电阻。
1.2 MCU部分 MCU的复位电路采用由R108和C105组成的RC积分电路实现上电复位功能。上电瞬间,由于电容电压不能突变,所以复位引脚为低电平,然后电容开始缓慢充电,复位引脚电位开始升高,最后变为高电平,完成芯片的上电复位。HT82K95E微控制器内部还包含一个低电压复位电路(LVR),用于监视设备的供电电压。如果设备的供电电压下降到0.9 V~VLVR的范围内并且超过1 ms的时间,那么LVR就会自动复位设备。 应当注意的是对于该设备的复位电路,还应加1个二极管1N4148,接法如图2中的VD100。如果不加此二极管,设备在第一次使用时能够正常复位,但在以后的使用却无法正常复位,原因是电容中的电荷无法释放掉,而该二极管可以通过整个电路快速释放掉电容中的电荷。 由于n RF24L01的数据包处理模式支持与单片机低速通信而无线部分高速通信,并且nRF24L01内部有3个不同的RX FIFO寄存器和3个不同的TX FIFO寄存器,在掉电模式下、待机模式下和数据传输的过程中MCU可以随时访问FIFO寄存器。这就允许SPI接口低速传送数据,并且可以应用于MCU 硬件上没有SPI接口的情况下。因此在设计中使用HT82K95E 的PA口模拟SPI总线与nRF42L01的SPI接口通信。
红外线无线鼠标器原理与制作
红外线无线鼠标器原理与制作 -------------------------------------------------------------------------------- 首页在线计算EDA技术电路图库嵌入式经验心得 电子基础电子制作国外资源技术文章下载频道 首页> 电子制作> 其他制作 红外线无线鼠标器原理与制作 -------------------------------------------------------------------------------- 红外线无线鼠标器原理与制作 鼠标器是用来产生控制屏幕光标移动的一种装置,是计算机最重要的外部输入设备之一,可用于人机会话的图形系统。鼠标器和计算机之间有一根连线,并且需要在桌面(鼠标垫)
上进行操作。在使用计算机和大屏幕投影机作多媒体教学时,由于鼠标器操作的牵制,会使教员的教学活动受到限制,不利于教学双方的交流。本文介绍的一种红外无线鼠标器,用红外线取代了鼠标器和计算机之间的连线,用按键控制光标的移动,解决了上述鼠标器使用不便的问题。 机械式鼠标器的工作原理 为了说明红外线无线鼠标器的工作原理,有必要先讲一下普通鼠标器的工作原理。 鼠标器按其工作原理可分为机械式和光电式两种,最常见的是机械式鼠标器。现在的机械鼠标器实际上是光机鼠标器,即将滚轮的机械转动转换成光信号,再变为电信号。下面以这种鼠标器为例说明其工作原理。 在机械式鼠标器底部有一个露出一部分的塑胶小球,当 鼠标器在操作桌面上移动时,小球随之转动,在鼠标器内部装有三个滚轴与小球接触,其中有两个分别是X 轴方向和Y 轴方向滚轴,用来分别测量X轴方向和Y轴方向的移动量,另一个是空轴,仅起支撑作用。拖动鼠标器时,由于小球带动三个滚轴转动,X轴方向和Y轴方向滚轴又各带动一个转轴(称为译码轮)转动。译码轮(见图1)的两侧分别装有红外发光二极管和光敏传感器,组成光电耦合器。光敏传感器内部沿垂直方向排列有两个光敏晶体管A和B,如图2所示。
bfriendit无线鼠标的使用及故障排除方法
Bfriendit无线鼠标的使用及故障排除方法 小编:傅斌
小编这次讲得基础的,在我们的世界,太多“然并软”的东西,小编这次讲我们入门的,大家一起进步一起学习! 世界那么大,我们来瞅瞅,无线鼠标长啥样及排除故障; 如下图无线鼠标基础东西: 小编想问了,长这样的无线鼠标不能使用了,会那么问题呢? 一.直接不能使用了,动都动不了? 1.确保键盘和鼠标的电池都已经装好,鼠标的开关打开,接收器插到电视或者电脑的USB口上。 2.检查电池是否电量足够。
二.无线鼠标反应不灵敏,键盘反应慢? 1、检查鼠标的DPI是否调节到2500,也就是按一下中间的DPI键,感觉一下速度,不行再按一下。 2、把接收器在电视上换一下USB口,有些USB口不连着主板,导致供电不足,也会影响速度。 3、在鼠标下面加个鼠标垫,更好操作。 4、要是使用一段时间或者几个月以后出现这个问题,可能是您的电池供电不足了,这是就需要更换新电池就可以解决的。
三.无线键鼠一般使用多远距离合适? 1、一般无线键鼠厂家设定的理论距离都是10-30米;但是一般我们正常使用都是2-4米,这是我们视觉能够着的距离,这个距离内使用都会不错的。Bfriendit无线鼠标的数据参数:
四、我不用了无线鼠标和键盘需要关闭吗? 1.一般无线鼠标都是带开关的,不用了一段时间自己会休眠,但是还是建议不用了关掉电源开关,以免费电和影响鼠标使用寿命;键盘目前的设计都是不带开关的,也较为省电,一般只有您按下去按键才会耗电的,所以这个不用考虑耗电的问题,一般的键盘都是一节电池就可以的,部分是2节电池。
无线鼠标原理简介
无线鼠标原理 无线鼠标原理简介: 目前的市场上售卖的基本上都是光学鼠标和激光鼠标,更古老的机械鼠标、光电机械鼠标都已经淘汰,无线鼠标也是如此。因此要明白无线鼠标的工作原理,其实并没有太大困难,可以简单理解为:无线鼠标=有线鼠标-数据线+无线模块,这样是不是直白多了呢?
光学鼠标的工作原理如上图,LED或者Laser发出的光通过透镜,照射在鼠标工作表面(比如鼠标垫、或者桌面)上,部分反射光通过透镜进入成像传感器成像,并提供给图像分析芯片(DSP 数字微处理器)进行分析;当鼠标移动时,传感器就会截获一组高速拍摄的连贯图像,经DSP芯片分析处理后,得出鼠标的移动方向和移动量,并将这一信息传输给电脑,于是便有了桌面光标的移动行为。 CMOS成像传感器和DSP两部分合称鼠标的光学引擎,激光引擎和普通光学引擎的差异是,采用了具有相干性、波长单一、功率集中的激光(Laser)取代LED光来照射工作表面,这样可以提高鼠标对不同工作表面的适应能力,目前高端无线鼠标也大都采用激光引擎。
图中NRF字样的小方块就是2.4G无线芯片 其实无线鼠标和传统有线鼠标基本上是一样的,区别主要集中在最后一步的数据传输方式上,有线鼠标通过PS/2或者USB接口的数据线传输信息,而无线鼠标则采用红外、27MHz、2.4GHz和蓝牙等无线传输技术发送数据,摒弃了数据线,使用起来“无牵无挂”,自然更加方便。 无线传输技术介绍: 无线技术根据不同的用途和频段被分为不同的类别,其中包括蓝牙、Wi-Fi (IEEE 802.11)、Infrared (IrDA)、ZigBee (IEEE 802.15.4)等等多个无线技术标准,但市场上产品最多、消费者接触最广的,也仅有27Mhz、2.4G和蓝牙无线鼠标共三类。 27 MHz RF技术
光电鼠标的原理
光电鼠标的工作原理 摘要本文从结构、工作原理、性能参数以及和传统鼠标的对比等几个方面详细介绍了光电鼠标,并且简单介绍了激光鼠标的相关特性,最后对鼠标的未来发展趋势进行了简单的展望。 关键词光电鼠标光学感应器激光鼠标发展趋势 一、鼠标的概述 鼠标,全称为光电显示系统纵横位置指示器,是计算机系统的一种输入设备,因形似老鼠而得名。按其工作原理及其内部结构的不同可以分为机械式鼠标,光机式鼠标和光电式鼠标。下面将简单介绍机械式鼠标和光机式鼠标的工作原理: 1、机械式鼠标 机械鼠标主要由滚球、辊柱和光栅信号传感器组成。当拖动鼠标时,带动滚球转动,滚球又带动辊柱转动,装在辊柱端部的光栅信号传感器产生的光电脉冲信号反映出鼠标器在垂直和水平方向的位移变化,再通过电脑程序的处理和转换来控制屏幕上光标箭头的移动。这种机械鼠标的底部采用一个可四向滚动的胶质小球。这个小球在滚动时会带动一对转轴转动,分别为X转轴、Y转轴,在转轴的末端都有一个圆形的译码轮,译码轮上附有金属导电片与电刷直接接触。当转轴转动时,这些金属导电片与电刷就会依次接触,出现“接通”或“断开”两种形态,前者对应二进制数“1”、后者对应二进制数“0”。接下来,这些二进制信号被送交鼠标内部的专用芯片作解析处理并产生对应的坐标变化信号。只要鼠标在平面上移动,小球就会带动转轴转动,进而使译码轮的通断情况发生变化,产生一组组不同的坐标偏移量,反应到屏幕上,就是光标可随着鼠标的移动而移动。由于它采用纯机械结构,定位精度难如人意,加上频频接触的电刷和译码轮磨损得较为厉害,直接影响了机械鼠标的使用寿命。在流行一段时间之后,它就被成本同样低廉的“光机鼠标”所取代,后者正是现在市场上还很常见的所谓“机械鼠标”。 2、光机式鼠标 光机式鼠标,顾名思义是一种光电和机械相结合的鼠标。它在机械鼠标的基础上,将磨损最厉害的接触式电刷和译码轮改为非接触式的LED对射光路元件。当小球滚动时,
差速器工作原理及图片
简述差速器作用、结构与工作原理 一差速器的基本作用是什么? 汽车转弯时,内侧车轮和外侧车轮的转弯半径不同,外侧车轮的转弯半径要大于内侧车轮的转弯半径,这就要求在转弯时外侧车轮的转速要高于内侧车轮的转速。差速器的作用就是即是满足汽车转弯时两侧车轮转速不同的要求!这个作用是差速器最基本的作用,至于后为发展的什么中央差速器、防滑差速器、LSD差速器、托森差速器等,他们是为了提高汽车的行驶性能、操控性能而设计的。 二差速器的基本结构是什么? 典型的差速器结构图 1-轴承;2和8-差速器壳;3和5-调整垫片;6-行星齿轮;7-从动锥齿轮;4-半轴齿轮;9-行星齿轮轴; 差速器最基本的结构由差速器从动齿轮(图中的7)、差速器壳体、
行星齿轮轴、行星齿轮、半轴齿轮组成; 1-输入轴(将驱动差速器从动齿轮);2-差速器壳体;3-行星齿轮; 4-半轴齿轮(驱动两侧传动轴输出);
差速器结构图 说明:这里的框架即是差速器壳体;太阳齿轮即是所说的半轴齿轮; 桑塔纳差速器结构图 三差速器的传动原理是什么? 差速器的动力输入:从动齿轮(锥齿轮等),带动差速器壳体旋转; 差速器的输出:两个半轴齿轮,连接两侧的传动轴(也称为半轴)将动力给两侧车轮; 行星齿轮的自转:指的是行星齿轮绕行星齿轮轴的旋转;
行星齿轮的公转:指的是行星齿轮绕半轴齿轮轴线的旋转; 1直线行驶时差速器的工作状态: 直线行驶差速器状态图 直线行驶时,差速器壳体(作为差速器的输入)带动行星齿轮轴,从而带动行星齿轮绕半轴齿轮轴线公转,行星齿轮绕半轴齿轮轴线的公转将半轴齿轮夹持,带动半轴齿轮输出动力。所以在直线行驱时:左侧车轮转速(即左侧半轴齿轮转速)=右侧车轮转速(右半轴齿轮转速)=差速器壳体的转速。 2将车轮支起后,转一侧车轮,另一侧车轮将反向同速旋转,这是为什么呢?
差速器工作原理
【什么是差速器?以及差速器工作原理】 差速器具有三种功能: ?把发动机发出的动力传输到车轮上; ?充当汽车主减速齿轮,在动力传到车轮之前将传动系的转速减下来 ?将动力传到车轮上,同时,允许两轮以不同的轮速转动 为什么需要差速器? 当汽车转向时,车轮以不同的速度旋转。在这个图中你可以看到,在转弯时,每个车轮驶过的距离不相等,即内侧车轮比外侧车轮驶过的距离要短。因为车速等于汽车行驶的距离除以通过这段距离所花费的时间,所以行驶距离短的车轮转动的速度就慢。同时需要注意的是:前轮较之后轮,所走过的路程是不同的。 对于后轮驱动型汽车的从动轮,或前轮驱动型汽车的从动轮来说,不存在这样的问题。由于它们之间没有相互联结,它们彼此独立转动。但是两主动轮间相互是有联系的。因此一个引擎或一个变速箱可以同时带动两个车轮。如果你的车上没有差速器,两个车轮将不得不固定联结在一起,以同一转速驱动旋转。这会导致汽车转向困难。此时,为了使汽车能够转弯,一个轮胎将不得不打滑。对于现代轮胎和混凝土道路来说,要使轮胎打滑则需要很大的外力,这个力通过车桥从一个轮胎传到另一个轮胎,这样就给车桥零部件产生很大的应力。 差速器是将发动机扭矩按两个方向分开的设备,可允许每次输出的扭矩以不同的速度旋转。差速器的在汽车上的应用
1-输入轴(将驱动差速器从动齿轮);2-差速器壳体;3-行星齿轮;4-半轴齿轮(驱动 两侧传动轴输出); 差速器结构图 说明:这里的框架即是差速器壳体;太阳齿轮即是所说的半轴齿轮;
如果想要改善这个现象使车辆在转弯时能够变的较为顺畅,就要让左边轮子慢一点,右边轮子快一点,用不同的转速来弥补距离的差异。为了解决这个问题,一百年前,法国Renault (雷诺)汽车的创始人Louis Renault,就发明了差速器这个东西。差速器的内主要是由螺旋环状齿轮(主齿轮)、行星齿轮和左右轴齿轮所组成的,有了差速器车辆在转弯时动力会透过变速箱,主传动轴将动力传至差速器使大的螺旋环状齿轮转动,在转弯时二边车轮的转速虽然不同,但透过行星齿轮后可自行调节左右车轮不同的速差,使车辆顺利的完成转弯的动作。透过文字可能比较难懂,因此我们找了影片让大家一看就能了解它的作动原理。 虽然有了差速器可让车轮顺利的完成转弯的动作,但当有一轮驱动轮打滑或空转时,车辆将会失去前进的动力。这主要是因为当一侧车轮失去抓地力时,这一轮的阻力为零,而另一侧车轮的阻力却很大,在螺旋环状齿轮转动的同时,调节车轮转速的行星齿轮也会不停的一直自转,把动力源源不断的传递到失去抓地力的那一轮,而使车辆无去前进只能呆在原地不动。为了解决这种情况的发生,事必要对差速器的作动进行某种程度的限制,因此就出现了限滑差速器和差速器锁定这类特殊的差速器。 差速器工作原理 整个差速器系统的核心是四个齿轮:两个行星齿轮和两个与传动轴相连的半轴齿轮。这四个齿轮都在差速器壳内,这个壳体连接着传动轴(图中①),本身也要转动,在行驶时它的转动方向与车轮转动方向相同。 我们可以用一个球体来解释差速器问题!我们假设这个球体和地球一样有两个极点,并且以两极的连线为轴进行自传,这个球体可以理解为差速器壳体,这个壳体的两极连接的就是汽车的左右半轴。这里安装着两个半轴齿轮,两齿轮中心的连线就是差速器壳体转动的轴线(图中②、④)。 除了两个半轴齿轮外还有两个行星齿轮(图中③)。理解两个行星齿轮的状态是理解差速原理的关键。还拿刚才所说的球体来举例,两个齿轮是对向安装并且与半轴齿轮垂直,相当于6点钟和12点钟位置。这两个齿轮经常要朝相反方向转动,从而实现差速作用。壳体在自传过程中会带着两个齿轮做公转。 这四个齿轮虽然安装在壳体内部但都是可以独立于差速器壳体转动的,只不过它们相互咬合在一起,每个齿轮的两边都咬合着另外两个齿轮(每个半轴齿轮都咬合着两个行星齿轮,每个行星齿轮都咬合着两个半轴齿轮),只要其中一个齿轮转动都会牵扯到其他三个齿轮一起转动,而且其中一个齿轮朝某个方向转动,与它相对的另一边齿轮必定朝反方向转动!这个现象可以通过实验来证实:
无线自供电鼠标设计与实现
无线自供电鼠标设计与实现 【摘要】本文主要利用电磁感应原理,研发了一种自充电无线鼠标产品。其包括鼠标垫一个和无线鼠标一个,鼠标垫内部由磁性相反的磁铁交替组成网格状分布;鼠标内部组装有带铁芯的电磁感应线圈、整流电路、可充电电池、以及鼠标的工作电路板。通过鼠标在鼠标垫上移动,感应线圈内部的磁通量会发生变化,从而产生感应电流,通过整流电路将交变电流转换为直流电输出,为鼠标提供电能,同时为可充电电池充电,无需外接电源供电,更加节能环保。 【关键词】电磁感应;鼠标;自充电 目前,广泛应用的无线鼠标多是以干电池提供能量,因鼠标功耗较大,需频繁更换电池,不仅给消费者带来不便,增加了使用成本,更造成严重的资源浪费,并且废弃电池中含有大量的铅、汞等重金属有害物质,如果回收处理不妥当的话,会加重环境污染。而选用锂电池或镍氢可充电电池的无线鼠标往往需要频繁充电,如长时间不用或忘记充电,将给使用带来不便。本文目的旨在开发研制一种可自充电的无线电磁感应鼠标,积极响应节能减排的可持续发展的主题,利用电磁感应原理生成电能,储存在可充电电池中,同时可为鼠标正常工作提供持续能量。 1 电磁感应技术 闭合电路的一部分导体在磁场中做切割磁感线运动,导体中就会产生电流,这种现象叫做电磁感应现象。因此产生的电流称为感应电流。将这种电磁感应技术应用于无线鼠标,可实现为鼠标工作提供能量,摆脱更换电池或频繁充电的烦恼。 2 设计与实施 区别于普通干电池供电的无线鼠标,我们研发的可自充电的无线电磁感应鼠标主要由以下几个部分构成:网格状磁场分布的鼠标垫、电磁感应线圈、整流电路、可充电电池以及鼠标的工作电路板。 2.1 网格状磁场分布鼠标垫 实施方案:将具有强磁场的正方形磁铁按图1左图中所示的排布方式粘结在硬质薄板上,使最近邻区域内磁场磁性相反。然后粘合鼠标垫表层,压紧保证工作面平整。 工作原理:相邻的小区域内有相反磁性的磁场分布,是为了保证鼠标沿各个方向移动时,磁场的变化能达到最大,线圈内通过的磁通量变化,从而在相同移动距离下可最大程度产生感应电流,感应电流进一步由整流电路整合后输出,为鼠标工作供能。
无线鼠标的设计与实现
无线鼠标的设计与实现 发布者:https://www.360docs.net/doc/4118396847.html,发布时间:2010-9-9 阅读:59次 摘要:将机械鼠标的滚动动作和左右键的操作转换成开关信号,用方波电路产生的方波信 号代替原鼠标内光敏传感器的脉冲信号,用相应的开关动作可以实现鼠标光标移动和鼠标的单双击操作!而用发射和接收电路代替原来的鼠标线,可以实现鼠标的遥控。 设计任务和要求:实现鼠标的长距离(1—50米)遥控。其中的电路设计包括发射模 块(含编码电路)、接收模块(含解码电路)、方波发生电路和开关电路等等电路的设计及它们之间的连接、匹配。 一.无线鼠标电路的设计和实现 1.总体方案论证: 方案一:在鼠标与电脑接口间用发射和接收电路代替了鼠标线,本方案除了要考虑发射和接收模块外,还要考虑接口协议,如下图。考虑到时间和难度的问题,没有选择此方案。 方案二:用遥控器控制鼠标,即用遥控器的按键信号控制鼠标的上下左右移动方向和左右键。只需要考虑发射和接收电路,不需要考虑接口协议,如下图。选择此方案。 2.发射模块和接收模块的电路的实现方案: 方案一:发射模块F05和接受模块J05C的应用。F05采用声表谐振器稳频,工作频率为315MHZ,以AM方式调制,采用PT2262编码器240mm小拉杆天线发射信号;J05C由超外差电路结构IC芯片和温度补偿电路构成,具有较高的接收灵敏度及稳定性。芯片内含低噪声射频放大器、混频器、本地振荡器、中频放大器、滤波器及限幅比较器,输出为数据电平信号,直接接至PT2272解码器进行解码,接收天线约22cm。
方案二:利用红外线技术实现红外信号的发射和接收。发射部分,利用单片机AT89C2051检测坐标位移和按键动作,经过处理按一定的编码输出到发射电路。接收部分使用红外遥控用专用接收管,如IRM8608S,对红外信号接收和解调,并输出TTL电平;TTL电平的数据流送给单片机进行处理,单片机把该数据转化为符合PS/2鼠标规范的数据报告,发送给计算机。如图:
差速器工作原理及图片
简述差速器作用、结构与工作原理 张岩 2009-7-16字号:大中小 一差速器的基本作用是什么? 汽车转弯时,内侧车轮和外侧车轮的转弯半径不同,外侧车轮的转弯半径要大于内侧车轮的转弯半径,这就要求在转弯时外侧车轮的转速要高于内侧车轮的转速。差速器的作用就是即是满足汽车转弯时两侧车轮转速不同的要求!这个作用是差速器最基本的作用,至于后为发展的什么中央差速器、防滑差速器、LSD差速器、托森差速器等,他们是为了提高汽车的行驶性能、操控性能而设计的。 二差速器的基本结构是什么? 典型的差速器结构图 1-轴承;2和8-差速器壳;3和5-调整垫片;6-行星齿轮;7-从动锥齿轮;4-半轴齿轮;9-行星齿轮轴; 差速器最基本的结构由差速器从动齿轮(图中的7)、差速器壳体、
行星齿轮轴、行星齿轮、半轴齿轮组成; 1-输入轴(将驱动差速器从动齿轮);2-差速器壳体;3-行星齿轮; 4-半轴齿轮(驱动两侧传动轴输出);
差速器结构图 说明:这里的框架即是差速器壳体;太阳齿轮即是所说的半轴齿轮; 桑塔纳差速器结构图 三差速器的传动原理是什么? 差速器的动力输入:从动齿轮(锥齿轮等),带动差速器壳体旋转; 差速器的输出:两个半轴齿轮,连接两侧的传动轴(也称为半轴)将动力给两侧车轮; 行星齿轮的自转:指的是行星齿轮绕行星齿轮轴的旋转;
行星齿轮的公转:指的是行星齿轮绕半轴齿轮轴线的旋转; 1直线行驶时差速器的工作状态: 直线行驶差速器状态图 直线行驶时,差速器壳体(作为差速器的输入)带动行星齿轮轴,从而带动行星齿轮绕半轴齿轮轴线公转,行星齿轮绕半轴齿轮轴线的公转将半轴齿轮夹持,带动半轴齿轮输出动力。所以在直线行驱时:左侧车轮转速(即左侧半轴齿轮转速)=右侧车轮转速(右半轴齿轮转速)=差速器壳体的转速。 2将车轮支起后,转一侧车轮,另一侧车轮将反向同速旋转,这是为什么呢?
智能组网理论笔测试题(A卷)
智能组网理论评测试题 (A卷) 姓名:__________ 维护单位:_____________ 得分:_________ 一、单择题:(每空2分,共40分) 1.智能组网产品分为终端型产品和( D ); A.调测型产品 B. 设计型产品 C.售后型产品D. 服务型产品 2.同时支持2.4G和5G的802.11协议是以下哪一种( B ); A. 802.11ac B. 802.11n C. 802.11b D. 802.11a 3.WDS的全称是( C ); A.万能中继 B. 无线桥接 C.无线分布式系统 D. 无线中继 4.WIFI术语里里经常提到的SSID,指的是( A ); A. WIFI信号的名称 B. WIFI加密方式 C.支持的无线协议 D. 无线中继 5.用户家,75㎡面积、二室一厅,平时就用手机看看新闻、查查股票,有一个 TPLINK路由在客厅,但卧室无线信号不太稳定,以下哪种组网方式比较贴合该场景( A ); A.无线扩展器 B.有线桥接 C.电力设备D. AP面板 6.路由器包装盒上的300M代表的是( A ); A.最大无线速率 B. 最大RAM C.最大ROMD. 最大有线速率 7.能独立进行管理及配置,但无法统一管理的组网设备,一般我们称它为 ( A ); A.胖AP B. 瘦AP C. WIFI放大器 D. AC管理器 8.EOC组网是指基于( B )的组网技术; A.电力线B.同轴电缆 C.室内暗管 D. 无线协议
9.高速率、衰减大、穿墙性能弱的WIFI频段是( B ); A. 2.4GB. 5G 10.802.11AC,单空间流,最大支持无线传输速率为( C ); A. 150M B.1200M C. 433M D. 300M 11.我们一般将入户光纤所连接的ONU或天翼网关,称为家庭网络的( B )点; A.接入 B. 汇聚 C.分散D. 信息 12.判断无线网络质量的3个要素为:信号强度、信道干扰和( C ); A.加密方式 B. 信道频宽 C.多线程下载速率 D. 无线中继 13.2.4G无线频段下,完全互不干扰的信道有( C)个?; A. 14B. 13 C. 3 D. 11 14.802.11n协议支持的最大工作频宽是( C )M A. 20 B. 40 C. 150 D. 54 15.在用户家中进行无线网络评测时,对用户需连接使用的WIFI信号测试要求 为目标覆盖区域内95%以上的位置,接受信号场强值( B ),信噪比SMR 值应该大于-20db; A.≥-75dbm B. ≥-65dbm C.≥-45dbm D. ≥-35dbm 16.我们终端设备能搜索到的WIFI名称,在WIFI的术语里叫( A ) A. SSID B. 无线桥接 C.无线分布式系统 D. 无线中继 17.WIFI的工作原理特性以下说法中错误的是( C ); A.半双工 B. 时分系统 C.频分系统 D. 具备冲突避免机制 18.测试区域内无线信号场强为-55dbm,周围WIFI信号也较少,但测试下载速 率只有实际宽带带宽的40%( B ),此时要解决什么问题? A.干扰 B. 终端性能 C.组网设备性能 D. 提高带宽