下水箱液位前馈反馈控制系统

下水箱液位前馈反馈控制系统实验
一、实验目的
1、学习前馈-反馈控制的原理。
2、了解前馈-反馈控制的特点。
3、掌握前馈-反馈控制的设计。
二、实验设备
A3000-FS/FBS现场系统,任意控制系统。
三、实验原理
1、控制原理
前馈控制又称扰动补偿,它与反馈调节原理完全不同,是按照引起被调参数变化的干扰大小进行调节的。在这种调节系统中要直接测量负载干扰量的变化,当干扰刚刚出现而能测出时,调节器就能发出调节信号使调节量作相应的变化,使两者抵消与被调量发生偏差之前。因此,前馈调节对干扰的克服比反馈调节快。但是前馈控制是开环控制。其控制效果需要通过反馈加以检验。前馈控制器在测出扰动之后,按过程的某种物质或能量平衡条件计算出校正值。如果没有反馈控制,则这种校正作用只能在稳态下补偿扰动作用。
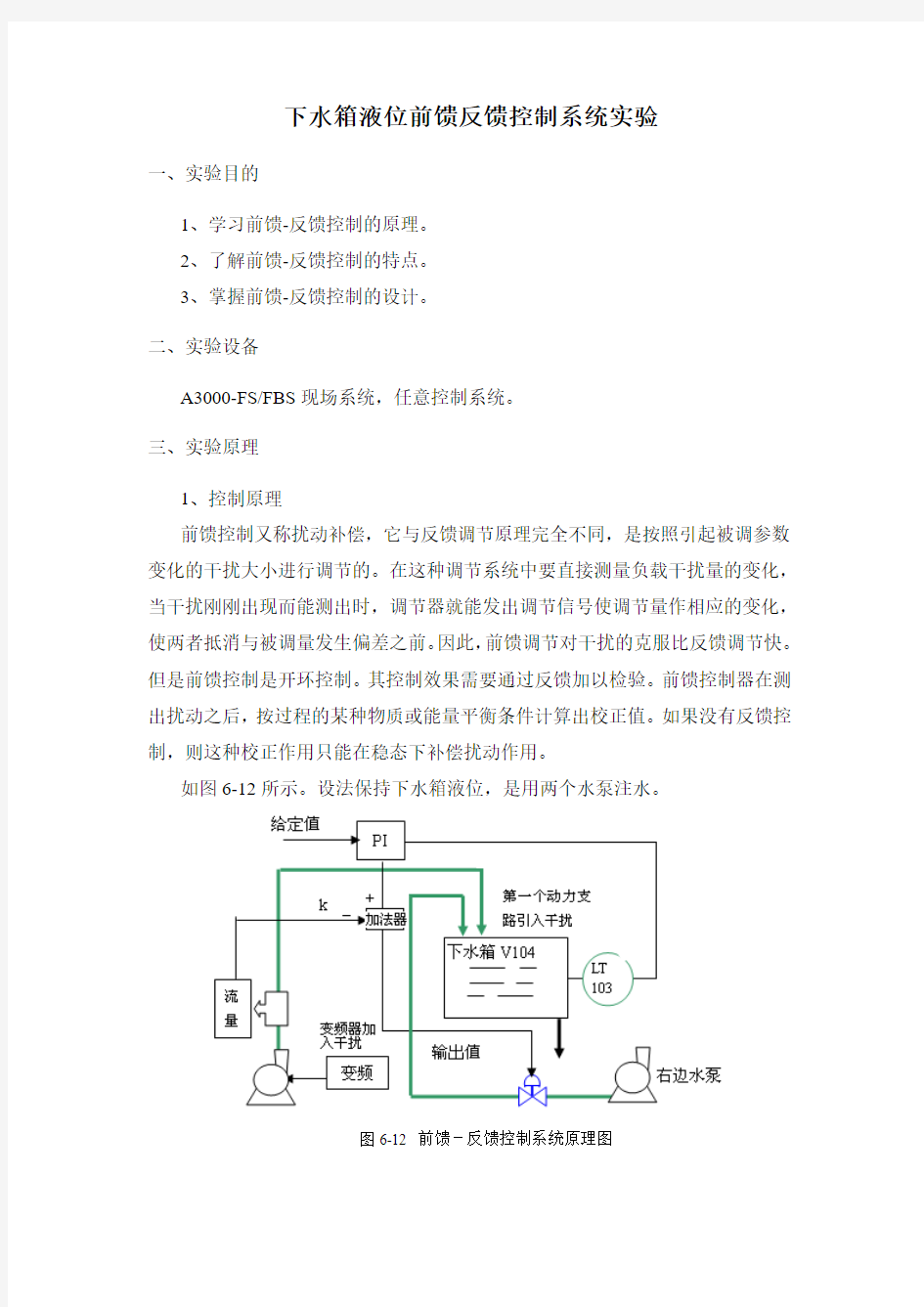
如图6-12所示。设法保持下水箱液位,是用两个水泵注水。
图6-12 前馈-反馈控制系统原理图
如果支路一出现扰动,经过流量计测量之后,测量得到干扰的大小,然后在第二个支路通过调整调节阀开度,直接进行补偿。而不需要经过调节器。
如果没有反馈,就是开环控制,这个控制是有余差的。增加反馈通道,使用PI 进行控制,如图6-12所示。
我们按照参考书上的内容,进行了部分简化。
前馈控制不考虑控制通道与对象通道延迟,则根据物料平衡关系,简单的前馈控制方程为:Qu=dF 。
也就是两个流量的和保持稳定。但是有两个条件,一是准确知道第一个支路的流量,二是准确知道调节阀开度与流量对应关系1K ,如图6-13所示:
图6-13 调节阀开度与流量比例关系
2、测量与控制端连接表
40806020
3、实验方案
被调量为调节阀,控制量是支路2流量,控制目标是下水箱液位。
首先实现前馈控制,通过测量支路1、2流量,控制调节阀,使得支路2流量变化跟踪支路1流量变化。
然后实现反馈控制,通过测量水箱液位,控制调节阀,从而把前馈控制不能修正的误差进行修正。
4、参考结果
在前馈-反馈控制下的加法器系数K取不同值时的控制曲线如图6-14—6-17所示:
图6-14 K=0时前馈-反馈控制曲线图6-15 K=1时前馈-反馈控制曲线
图6-16 K=2时前馈-反馈控制曲线图6-17 K=3时前馈-反馈控制曲线
四、实验要求
1、设计前馈-反馈控制系统。
2、经过参数调整,获得最佳的控制效果,并通过干扰来验证。
五、实验内容与步骤
1、在A3000-FS上,打开手动调节阀JV104、JV103,1#电磁阀,JV201、JV206。其余阀门关闭。
2、按照测量与控制列表进行连线:
在A3000-CS上,电磁流量计输出端连接到AI2;涡轮流量计输出端连接AI0;下水箱液位连接到AI1;AO0连接到电动调节阀(FV101)。
3、打开A3000电源。
4、在A3000-FS上,启动左边水泵和右边水泵。左边水泵使用变频器控制。
5、首先测量调节阀开度和流量关系。给出不同的开度电流,观察电磁流量计的数值。
6、计算关系函数,加入控制软件中。
7、开始前馈-反馈控制。启动上位机,设置控制器参数,设置前馈系数,记录其实时曲线。
8、通过变频器改变左边支路水流量,观察并记录控制曲线的变化。
9、反复进行操作8,并修正K值参数,并将其同调节阀开度与流量对应关系
K
1做比较,得出最佳参数K。
六、思考问题
分析前馈-反馈控制与串级控制的区别,优缺点。
七、实验结果提交
1、通过抓图方法,提交获得的曲线。
2、给出最佳控制参数。
前馈反馈控制系统
前馈—反馈复合控制系统 摘要 流量是工业生产过程中重要的被控量之一,因而流量控制的研究具有很大的现实意义。锅炉的流量控制对石油、冶金、化工等行业来说必不可少。本论文的目的是锅炉进水流量定值控制,在设计中充分利用自动化仪表技术,计算机技术,自动控制技术,以实现对水箱液位的过程控制。首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。然后,根据被控对象模型和被控过程特性并加入PID调节器设计流量控制系统,采用动态仿真技术对控制系统的性能进行分析。同时,通过对实际控制的结果进行比较,验证了过程控制对提高系统性能的作用。随着计算机控制技术的迅速发展,组态技术开始得到重视与运用,它能够很好地解决传统工业控制软件存在的种种问题,使用户能根据控制对象和控制目的任意组态,完成最终的自动化控制工程。 关键词:流量定值;过程控制;PID调节器;前馈控制;系统仿真
目录 一.前馈控制 1.前馈控制的定义 2.换热器前馈控制 二.前馈控制的特点及局限性 1.前馈控制的特点 2.前馈控制的局限性 三.反馈控制 1.定义
2.反馈控制的特点 四.复合控制系统特性 1.前馈-反馈复合控制原理 2.复合控制系统特点 五.小结 六.参考文献 一、前馈控制 1.前馈控制的定义 前馈控制(英文名称为Feedforward Control),是按干扰进行调节的开环调节系统,在干扰发生后,被控变量未发生变化时,前馈控制器根据干扰幅值,变化趋势,对操纵变量进行调节,来补偿干扰对被控变量的影响,使被控变量保持不变的方法。
2.换热器前馈控制 在热工控制系统中,由于控对象通常存在一定的纯滞后和容积滞后,因而从干扰产生到被调量发生变化需要一定的时间。从偏差产生到调节器产生控制作用以及操纵量改变到被控量发生变化又要经过一定的时间,可见,这种反馈控制方案的本身决定了无法将干扰对被控量的影响克服在被控量偏离设定植之前,从而限制了这类控制系统控制质量的进一步提高。考虑到偏差产生的直接原因是干扰作用的结果,如果直接按扰动而不是按偏差进行控制,也就是说,当干扰一出现调节器就直接根据检测到的干扰大小和方法按一定规律去控制。由于干扰发生后被控量还未显示出变化之前,调节器就产生了控制作用,这在理论上就可以把偏差彻底消除。按照这种理论构成的控制系统称为前馈控制系统,显然,前馈控制对于干扰的克服要比反馈控制系统及时的多。 前馈控制系统的工作原理可结合下面图1所示的换热器前馈控制进一步说明,图中虚线部分表示反馈控制系统。 图1换热器物料出口温度前馈控制流程图 t一定。当被加换热器是用蒸汽的热量加热排管中的料液,工艺上要求料液出口温度 1 热水流量发生变化时,若蒸汽量不发生变化,而要使出口温度保持不变,就必须在被加热水量发生变化的同时改变蒸汽量。这就是一个前馈控制系统。 图中虚线所示是反馈控制的方法,这种方法没有前馈控制及时。图1前馈控制系统的原理框图于图2所示。
水箱液位控制系统设计说明
过程控制综合训练 课程报告 16 —17 学年第二学期课题名称基于PLC和组态王的 系统 姓名 学号 班级 成绩
水箱液位控制系统 [摘要] 在工业生产过程中,液位贮槽如进料罐、成品罐、中间缓冲器、水箱等设备应用十分普遍,为了保证生产正常进行,物料进出需均衡,以保证过程的物料平衡。因此,工艺要求贮槽的液位需维持在给定值上下,或在某一小围变化,并保证物料不产生溢出。例如,锅炉系统汽包的液位控制,自流水生产系统过滤池、澄清池水位的控制等等。根据课题要求,设计一个单容水箱的液位过程控制系统,该系统能对一个单容水箱液位的进行恒高度控制。 关键词:过程控制液位控制PID控制 Abstract: In the process of industrial production, liquid storage tank such as product cans, buffer, tanks and other equipments are widely used. In order to ensure the normal production,material supply and demand must be balanced to guarantee the process of the production. So, the process requires that the liquid level in the tank should be maintained at a given value, or change in a small range,and ensure that the material does not overflow,for instance,system of boiler drum level control, level control of filter pool and clarification pool of self-flowing water production
前馈控制系统的基本原理
前馈控制系统 前馈控制系统的基本原理 前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上。图2.4-1物料出口温度θ需要维持恒定,选用反馈控制系统。若考虑干扰仅是物料流量Q ,则可组成图2.4-2前馈控制方案。方案中选择加热蒸汽量s G 为操纵变量。 图2.4-1 反馈控制 图2.4-2 前馈控制 前馈控制的方块图,如图2.4-3。 系统的传递函数可表示为: ) ()()() ()(1S G S G S G S Q S Q PC ff PD += (2.4-1) 式中)(s G PD 、)(s G PC 分别表示对象干扰 道和控制通道的传递函数; ) (s G ff 为前馈控 图2.4-3 前 馈控制方块图 制器的传递函数。 系统对扰动Q 实现全补偿的条件是:
0)(≠s Q 时,要求0)(=s θ (2.4-2) 将(1-2)式代入(1-1)式,可得 ) (s G ff = ) ()(S G S G PC PD - (2.4-3) 满足(1-3)式的前馈补偿装置使受控变量θ不受扰动量Q 变化的影响。图2-4-4表示了这种全补偿过程。 在Q 阶跃干扰下,调节作用c θ和干扰作用d θ的响应曲线方向相反,幅值相同。所以它们的合成结果,可使θ达到 图2.4-4 前馈控制全补偿示意图 理想的控制连续地维持在恒定的设定值上。显然,这种理想的控制性能,反馈控制系统是做不到的。这是因为反馈控制是按被控变量的偏差动作的。在干扰作用下,受控变量总要经历一个偏离设定值的过渡过程。前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾。 1.前馈控制与反馈控制的比较 图 2.4-5 反馈控制方块图 图 2.4-6 前馈控制方块图
前馈反馈水箱控制系统设计
课程设计 名称:前馈反馈水箱控制系统系别: 专业: 姓名: 学号: 指导教师:
·成绩评定· 指导教师评语: 课程设计成绩评定 班级姓名学号 综合成绩: 指导教师签字年月日
目录 一设计方案的介绍 (4) 二、工艺流程 (5) 三、前馈反馈控制的理论 (5) 四、设仪器仪表的选型 (5) 1、控制装置的选择 (5) 2、监测仪表 (6) 3、控制阀的选型 (6) 五、测量与控制端连接表 (7) 六、参数的整定 (7) 1、静态放大系数K F的整定 (7) 2、控制器参数的选择 (8) 七、总结 (9) 八、参考文献 (10)
九、附录 一设计方案的介绍 设计采用前馈反馈控制来实现水箱的液位控制。其中前馈控制可以补偿干扰对被控变量的扰动,前馈控制之后产生的余差则可以通过反馈控制进行修正,达到要求的控制精度。被控变量为水箱的液位,控制变量为水的流量。 采用两个支路,其中第一个支路为主回路,包括一个水泵(采用变频器变频控制电机模拟流量扰动),涡轮流量计;第二个支路为控制补偿回路,包括一个水泵(输出流量恒定),电动控制阀。除此之外在反馈回路中还需要一个液位测量仪表和PID控制仪表一台。前馈控制在不考虑控制通道与对象通道延迟,而且支路一流量可以准确的测量,需要一个PID控制仪表。前馈控制信号和反馈控制信号通过一个加法器连接,实现对控制阀的控制。 前馈反馈系统结构框图 1
前馈反馈控制系统原理图 2 二工艺流程 水箱液位的控制主要是控制水箱中的液位在要求的精度范围内。 一号水泵作为动力源给水的输送提供动力,进入水箱。并用变频器控制一号水泵用来模拟流量上产生的扰动。 二号水泵为补偿回路提供动力,为水箱提供水补偿。当扰动产生后,通过前馈控制调节阀对扰动产生补偿。补偿后产生的余差再通过反馈控制控制调节阀进行调节。 三前馈反馈控制的原理 前馈控制又称扰动补偿,它与反馈调节原理完全不同,是按照引起被调参数变化的干扰大小进行调节的。在这种调节系统中要直接测量负载干扰量的变化,当干扰刚刚出现并能被测出时,调节器就能发出调节信号使调节量作相应的变化,使两者在被调量发生偏差之前抵消。因此,前馈调节对干扰的客服比反馈调节及时。但是前馈控制是开环控制,其控制效果需要通过反馈加以检验。前馈控制器在测出扰动之后,按过程的某种物质或能量平衡条件计算出校正值。如果前馈支路出现扰动,经过流量计测量之后,测量得到干扰的大小,然后在反馈支路通过调整调节阀开度,直接进行补偿。而不需要经过调节器。 四仪器仪表的选型 1、控制装置的选择 由于不是大型生产过程,对自动化水平要求不高,所以选择采用常规仪表控制。考虑到价格、实用性等因素,选择数字化、智能化的国产电动控制仪表。如果考虑控制仪
前馈控制和反馈控制
前馈控制、反馈控制及前馈-反馈控制的对比 1、前馈控制属于开环控制,反馈控制属于负反馈的闭环控制 一般定值控制系统是按照测量值与给定值比较得到的偏差进行调节,属于闭环负反馈调节。其特点是在被控变量出现偏差后才进行调节;如果干扰已经发生而没有产生偏差,调节器不会进行工作。因此反馈控制方式的调节作用落后于干扰作用。 前馈调节是按照干扰作用来进行调节的。前馈控制将干扰测量出来并直接引入调节装置,对于干扰的克服比反馈控制及时。 现在以换热器控制方案举例,直观阐述前馈控制和反馈控制: 前馈控制方案 反馈控制方案 2、前馈控制系统中测量干扰量,反馈控制系统中测量被控变量 在单纯的前馈控制系统中,不测量被控变量,而单纯的反馈控制系统中不测量干扰量。 3、前馈控制需要专用调节器,反馈控制一般采用通用PID调节器 反馈调节符合PID调节规律,常用通用PID调节器、DCS等或PLC控制系统实现。 前馈调节使用的调节器是是根据被控对象的特点来确定调节规律的前馈调节器。 4、前馈控制只能克服所测量的干扰,反馈控制则可克服所有干扰 前馈控制系统中若干扰量不可测量,前馈就不可能加以克服。而反馈控制系统中,任何干扰,只要它影响到被控变量,都能在一定程度上加以
克服。 5、前馈控制理论上可以无差,反馈控制必定有差 反馈调节使系统达到动态稳定,让被调参数稳定在给定值附近动态变化,却不能使被调参数稳定在给定值上不动。 前馈调节在理论上可以实现无差调节。 6、前馈控制的局限性 A、在生产应用中各种环节的特性是随负荷变化的,对象动态特性形式多样性难以精确测量,容易造成过补偿或欠补偿。为了补偿前馈调节的不准确,通常将前馈和反馈控制系统结合起来组成前馈反馈控制系统。 B、工业对象存在多个扰动,若均设置前馈控制器,那设备投资高,工作量大。 C、很多前馈补偿结果在现有技术条件下没有检测手段。 D、前馈控制受到前馈控制模型精度限制。 E、前馈控制算法,往往做近似处理。
前馈、反馈、三冲量控制介绍
一.前馈控制原理 前面讨论的所有控制系统,都属于反馈控制系统,无论其系统结构如何,它们的调节回路的基本工作原理都是一样的。下面要介绍的前馈控制系统则有着截然不同的控制思想。前馈控制思想及应用由来已久,但主要是由于技术条件的限制,发展较慢。随着计算机和现代检测技术的飞速发展,前馈控制正受到更多的重视和应用。 在反馈控制系统中,都是把被控变量测量出来,并与给定值相比较;而在前馈控制系统中,不测量被控变量,而是测量干扰变量,也不与被控变量的给定值进行比较。这是前馈与反馈的主要区别。为了系统地说明前馈控制思想,同时也为了在比较中进一步加深对反馈控制思想的理解,画出图8-31进行比较分析。 (a)反馈控制(b)前馈控制 图8-31 两种加热炉温度控制系统 图8-31中的(a)是反馈控制,(b)是前馈控制。在前馈控制中,测量需要被加热的原油的流量,流量偏大就增加燃料量,原油流量偏小就减少燃料量,以达到稳定原油出口温度的目的。从动态过程分析,当原油流量增大时,一段时间后,出口温度会下降。但前馈测量出原油流量的增加量,迅速增加燃料量。如果燃料增加的量和时机都很好,有可能在炉膛中将干扰克服,几乎不影响原油出口温度。 如果该加热炉只存在原油流量这一个干扰,那么理论上讲,前馈控制可以把原油出口温度控制得很精确,甚至被控变量一点也不波动。这就是前馈控制思想,也是前馈控制的生命力所在。 二.前馈控制与反馈控制的比较 通常认为,前馈控制有如下几个特点: (l)是“开环”控制系统; (2)对所测干扰反应快,控制及时; (3)采用专用调节器; (4)只能克服系统中所能测量的干扰。 下面从几个方面比较前馈控制与反馈控制。画出图8-31两个控制系统的方块图如图8-32所示。
单容下水箱液位变频器PID单回路控制
电气与电子信息工程学院 自动化技术综合实训 设计题目:单容下水箱液位变频器PID单回路控制专业班级: 2009级自动化 学号: 200940230131 姓名:甘治鹏 指导教师:汤立刚皮大能 设计时间:2012/4/28~2012/5/11 设计地点:自动化综合实验室
自动化技术综合实训任务书 2011 ~2012 学年第2学期 学生姓名:甘治鹏专业班级:自动化2009 同组人: 王聪唐奇敏陈飞霞王勇军尹梦婷张艳明孔帆 指导教师:汤立刚皮大能工作部门:电气学院电气自动化教研室 一、自动化技术综合实训题目:自动化技术综合实训 1、单容下水箱液位变频器PID单回路控制 2、双容下水箱液位变频器PID单回路控制 3、流量变频器PID单回路控制 4、液位和进口流量串级控制 5、流量-液位前馈反馈控制 二、自动化技术综合实训内容 1.通过查阅资料掌握所选课题的原理、结构、并根据任务书用CAD设计1套过程控制系统图纸,包括:自控设备清单、控制流程图、控制原理图、PLC系统硬件配置图、I/O地址分配表、I/O接线图等。 2.自学西门子S7-300系统的硬件知识和STEP7软件的编程组态方法,并根据设计图完成机架配置、硬件组态、从站挂接和I/O口地址分配、用户程序编写等工作。 3.自学和利时MACS V系统的硬件知识和软件的编程组态方法,并根据设计图完成机架配置、硬件组态、从站挂接和I/O口地址分配、用户程序编写等工作。 4.自学WINCC6.0或组态王组态软件并设计监控界面,包括定义数据词典、通讯设置、生产流程控制画面、参数显示、PID手动/自动调节界面、趋势曲线等的设计。 5.掌握在A3000高级过程控制装置上调试用户程序和参数整定的方法。 6.掌握西门子MM420变频器的使用方法。 7.掌握Profibus-DP现场总线的配置方法。 8.掌握判断故障及处理故障的方法。 9.每个学生必须独立完成设计,写出综合自动化技术综合实训报告并参加答辩。通过答辩考察学生对整个项目设计和实施过程的掌握程度,并根据其在整个设计阶段的理论知识应用能力、设计能力、实践操作能力、编程调试、故障分析及解决能力给出一个综合评价。
水箱水位控制系统
2.水箱水位控制系统 系统有3个贮水箱,每个水箱有2个液位传感器,UH1,UH2,UH3为高液位传感器,“1”有效;UL1,UL2,UL3为低液位传感器,“0”有效。Y1、Y3、Y5分别为3个贮水水箱进水电磁阀;Y2、Y4、Y6分别为3个贮水水箱放水电磁阀。SB1、SB3、SB5分别为3个贮水水箱放水电磁阀手动开启按钮;SB2、SB4、SB6分别为3个贮水箱放水电磁阀手动关闭按钮。 (二)控制要求 1.上电运行时系统处于停止状态。 2.SB1、SB3、SB5在PLC外部操作设定,通过人为的方式,按随机的顺序将水箱放空。 3.只要检测到水箱“空”的信号,系统就自动地向水箱注水,直到检测到水箱“满”信号为止。水箱注水的顺序要与水箱放空的顺序相同,每次只能对一个水箱进行注水操作。 4.为减少外部控制器件,现将每个水箱的放水控制按钮改为一个(即只有SB1、SB3、SB5),分别控制每个水箱的放水开启和关闭。也即,按一下SB1,水箱1放水,再按一下SB1,水箱1停止放水;按一下SB2,水箱2放水,再按一下SB2,水箱2停止放水;按一下SB3,水箱3放水,再按一下SB3,水箱3停止放水。系统其它控制要求保持不变。 (三)I/O配置表
(四)PLC控制系统原理图(硬件电路图) (五)调试指南 1.上电时候系统处于停止状态,所有灯不亮。 2.按动SB1、SB3、SB5按钮,可随机将三个水箱放空,对应Y2、Y4、Y6的亮。 3.只要检测到水箱“空”(即低液位传感器UL1-UL3亮),系统能自动地向水箱注水,对应Y1、Y3、Y5亮,直到检测到水箱“满”信号为止(即高液位传感器UH1-UH3亮)。 4.4.水箱注水的顺序与水箱放空的顺序相同,每次只对一个水箱进行注水操作(Y1、Y3、Y5互锁)。 5.5.按一下SB1,水箱1放水(Y2亮),再按一下SB1,水箱1停止放水(Y2灭); 6.6.按一下SB2,水箱2放水(Y4亮),再按一下SB2,水箱2停止放水(Y4灭); 7.7.按一下SB3,水箱3放水(Y6亮),再按一下SB3,水箱3停止放水(Y6灭)。 8.8.先放空的水箱先进水,已通过梯形图实现。(参见梯形图步骤8)
前馈控制系统的基本原理
前馈控制系统的基 本原理
前馈控制系统 前馈控制系统的基本原理 前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上。图2.4-1物料出口温度θ需要维持恒定,选用反馈控制系统。若考虑干扰仅是物料流量Q ,则可组成图 2.4-2前馈控制方案。方案中选择加热蒸汽量s G 为操纵变 量。 图2.4-1 反馈控制 图2.4-2 前馈控制 前馈控制的方块图,如图 2.4- 3。 系统的传递函数可表示为: )()()()()(1S G S G S G S Q S Q PC ff PD += (2.4-1) 式中)(s G PD 、)(s G PC 分别表示对象干扰 道和控制通道的传递函数;)(s G ff 为前馈控 图2.4-3 前馈控制方块图
制器的传递函数。 系统对扰动Q实现全补偿的条件是: ) (≠ s Q时,要求0 ) (= s θ(2.4-2) 将(1-2)式代入(1-1)式,可得 ) (s G ff = ) ( ) ( S G S G PC PD -(2.4-3) 满足(1-3)式的前馈补偿装置使受控变量 θ不受扰动量Q变化的影响。图2-4-4表示 了这种全补偿过程。 在Q阶跃干扰下,调节作用 c θ和干扰作用dθ的响应曲线方向相反,幅值相同。因此它们的合成结果,可使θ达到图2.4-4 前馈控制全补偿示意图 理想的控制连续地维持在恒定的设定值上。显然,这种理想的控制性能,反馈控制系统是做不到的。这是因为反馈控制是按被控变量的偏差动作的。在干扰作用下,受控变量总要经历一个偏离设定值的过渡过程。前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾。 1.前馈控制与反馈控制的比较
水箱液位控制课程设计-自动化
课程设计报告 设计题目:水箱液位控制系统 班级:自动化0901班 学号:20092400 姓名:刘弟文 指导教师:王姝梁岩 设计时间:2012年5月7日至5月25日
摘要 水箱液位控制系统是典型的自动控制系统,在工业应用上可以模拟水塔液位、炉内成分等多种控制对象的自动控制系统。 本次课程设计通过将电磁流量计和涡轮流量计分别作为主管道和副管道控制系统的调节阀控制水箱液位高度。首先通过测取被控液位高度过程的图像,建立了主回路的进水流量和主管道流量、进水流量和水箱(上)液位高度、副回路进水流量和水箱(上)液位、双容水箱的进水流量和水箱(下)液位之间的数学模型,从而加强了对液位控制系统的了解。然后,通过参数试凑法对PID参数的调试,实现了单容水箱液位(上)的单回路控制系统和双容水箱液位的单回路控制系统控制器的设计。最后通过MATLAB仿真实验,加深了对双容水箱滞后过程已经串级水箱液位过程和前馈控制系统的理解,对工业控制工程中对控制系统设计过程有了一定的认识。 关键词:水箱液位控制器PID参数整定串级控制前馈控制
目录 1 引言 (3) 2 课程设计任务及要求 (3) 2.1 实验系统熟悉及过程建模 (3) 2.2 实现单容水箱(上)液位的单回路控制系统设计 (3) 2.3 实现双容水箱液位(上下水箱串联)的单回路控制系统设计 (4) 2.4 实现水箱(上)液位与进水流量的串级控制系统设计 (4) 2.5 实现副回路进水流量的前馈控制 (5) 3 实验系统熟悉及过程建模 (5) 3.1 系统结构 (5) 3.2 过程建模 (6) 3.2.1 进水流量和主管道流量模型 (6) 3.2.2 进水流量和上水箱液位模型 (8) 3.2.3 副回路流量与上水箱液位数学模型 (9) 3.2.4 双容水箱串联进水流量与下水箱液位模型 (11) 4 单容水箱液位的单回路控制系统设计 (12) 4.1 结构原理 (12) 4.2 单容水箱控制器PID参数整定 (13) 4.2.1 单容水箱比例系数Kp的整定 (14) 4.2.2 单容水箱积分时间参数整定 (14) 4.2.3 单容水箱微分时间参数整定 (14) 4.3 单容水箱旁路阶跃干扰响应曲线 (15) 4.4 单容水箱副回路进水阶跃干扰响应曲线 (16) 4.5 干扰频繁剧烈变化的解决办法 (16) 5 双容水箱液位的单回路控制系统设计 (17) 5.1 双容水箱单回路控制系统原理 (17) 5.2 双容水箱控制器PID参数整定仿真实验 (18) 5.2.1 比例参数的整定 (18) 5.2.2 积分常数参数的整定 (19)
基于PLC水箱液位控制系统
摘要 本次毕业设计的课题是基于PLC的液位控制系统的设计。在设计中,笔者主要负责的是数学模型的建立和控制算法的设计,因此在论文中设计用到的PID算法提到得较多,PLC方面的知识较少。 本文的主要内容包括:PLC的产生和定义、过程控制的发展、水箱的特性确定与实验曲线分析, FX2系列可编程控制器的硬件掌握,PID参数的整定及各个参数的控制性能的比较,应用PID控制算法所得到的实验曲线分析,整个系统各个部分的介绍和讲解PLC的过程控制指令PID指令来控制水箱水位。 关键词:FX2系列PLC,控制对象特性,PID控制算法,扩充临界比例法,PID指令,实验。 The liquid level control system based on PLC ABSTRACT The subject of graduation design is based on PLC, liquid level control system design. In the design, the author is mainly responsible for the mathematical model and control algorithm design, so the design used in the paper referred to was more PID algorithm, PLC in less knowledge. Main contents of this article: PLC creation and definition, process control, development, and water tanks and experiment to determine the characteristics curve analysis, FX2 series PLC hardware control, PID tuning parameters and various parameters of the control performance comparison, the application PID control algorithm obtained experimental curve analysis, the entire system, introduce and explain the various parts of the PLC process control commands to control the tank level PID instruction. Keywords:FX2 series PLC, the control object characteristics, PID control algorithm, to expand the critical proportion method, PID instruction, experimental.
流量—锅炉液位前馈控制系统
课程设计任务书 (指导教师填写) 课程设计名称过程控制系统学生姓名*** 专业班级自动142班 设计题目流量—锅炉液位前馈控制系统 一、课程设计目的 本课程的课程设计是自动化专业学生学习完《过程控制系统》课程后,进行的一次全面的综合训练,其目的在于加深对过程控制系统理论和基本知识的理解,在熟悉工艺流程的基础上,掌握运用工程整定方法设计过程控制系统,以及系统的调试和投运的基本方法。 二、设计内容、技术条件和要求 (一)技术要求 按课程设计任务书提供的课题,应根据给出的设计任务,按“可选”的被控对象设计相应的控制系统。组成4人的设计小组,分模块进行,共同协作完成一个实际系统的设计、调试任务。 要求20%流量扰动作用下的液位变化不超过15%,恢复时间小于2分钟,稳态误差小于3% (二)设计内容 1、熟悉工艺流程及实验环境,根据对水位控制或工业锅炉生产过程控制的要求,设计相应的控制系统方案; 2、完成主要测控仪表的选型; 3、绘制系统结构框图、系统工艺流程图、系统硬件连线图,并在实验中修正完善; 4、按要求进行系统调试,分析P、I、D参数对控制质量的影响,分析前馈控制系统对扰动的调节作用及补偿能力; 5、撰写详细的设计说明书。 (三)设计说明书要求 设计说明书应包含以下内容 1.设计目的; 2.设计要求;
3.系统方案设计(包括:被控变量的选择、控制变量的选择,控制器类型的选择、控制器正反控制方式的选择、调节阀的选择、各测量传感器的选择); 4.系统结构框图、系统工艺流程图、系统硬件连线图; 5.调试过程分析,调试结果、调试中出现的问题及解决方法; 6.设计心得体会; 7.参考文献。 二、时间进度安排 按教学计划规定,过程控制系统课程设计总学时为两周,其进度及时间大致分配如下: 1 2017.6.26—6.26 查阅资料、完成各部分硬件设计; 2 2017.6.27—6.28 在模拟实验平台上进行系统调试,分析实验结果; 3 2017.6.29—6.30 总结设计过程、编写课程设计说明书。 三、主要参考文献 1、《过程控制及仪表》,邵裕森主编,电子工业出版社 2、《过程控制系统》,涂植英主编,机械工业出版社 3、《过程控制》,金以慧主编,清华大学出版社 指导教师签字:年月日
前馈—反馈复合控制系统
目录 课程设计任务书 一、前馈—反馈复合控制系统 1.1、前馈—反馈复合控制系统的基本概念 (3) 1.2、概念的理解 (3) 1.3、前馈—反馈系统的组成.........................................3—4 1.4、前馈—反馈复合控制系统的特点.. (4) 1.5、前馈—反馈复合控制系统中前馈前馈控制器的设计 (4) 二、控制系统的硬件设计 2.1、S7—300系统组成 (4) 2.2、CPU315—2DP (4) 2.3、模式选择开关…………………………………..…….4—5 2.4、状态及故障显示 (5) 三、控制系统的软件设计 3.1、硬件组态 (5) 3.2、工程管理器的使用 (6) 3.3、新建工程....................................................6—9 3.4、组态监控画面. (9) 3.5、组态变量……………………………………………9—10 3.6、软件编程…………………………………………..10—15 3.7、实验结果分析……………………………………….15—17 四、控制系统的调试 五、实验总结
一、前馈—反馈复合控制系统 1.1、前馈—反馈复合控制系统的基本概念 前馈—反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈—反馈复合控制系统。 1.2、概念的理解: (1)复合控制系统是指系统中存在两种不同的控制方式,即前馈、反馈(2)前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器 (3)引入反馈控制,是为了是系统能够克服所有的干扰信号对被调量产生的影响,除了已知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是我们能够考虑到的,有的我们肯本就考虑不到或是无法测量,都通过反馈控制来克服。 (4)系统中需要测量的信号既有被调量又有扰动信号。 1.3、前馈—反馈系统的组成 前馈—反馈复合控制系统主要由一下几个环节构成 (1)扰动信号测量变送器:对扰动信号测量并转化统一的电信号 (2)被调量测量变送器:对被调量测量并转化统一的电信号 (3)前馈控制器:对干扰信号完全补偿 (4)调节器:反馈控制调节器,对被调量进行调节 (5)执行器和调节机构 (6)扰动通道对象:扰动信号通过该通道对被调量产生影响 (7)控制通道对象:调节量通过该通道对被调量进行调节 前馈—反馈复合系统的原理方框图如图所示 前馈—反馈复合控制系统的原理图(1) 为了方便分析,通常将前馈—反馈复合系统的原理图简化为下图
过程控制系统综合设计报告
过程控制系统综合设计报告 班级: 姓名: 学号: 学期:
一、实验目的与要求 1.掌握DDC控制特点; 2.熟悉CS4100实验装置,掌握液位控制系统和温度控制系统构成; 3.熟悉智能仪表参数调整方法及各参数含义; 4.掌握由CS4100实验装置设计流量比值控制、液位串接控制、液位前馈反馈控制及四水箱解耦控制等设计方法; 5.掌握实验测定法建模,并以纯滞后水箱温度控制系统作为工程案例,掌握纯滞后水箱温度控制系统的建模,并用DDC控制方案完成控制算法的设计及系统调试。 以水箱流量比值控制、水箱液位串接控制、水箱液位前馈反馈控制及四水箱解耦控制为被被控对象,完成系统管路设计、电气线路设计、控制方案确定、系统调试、调试结果分析等过程的训练。以纯滞后水箱作为被控对象,以第二个水箱长滞后温度作为被控量,完成从实验测定法模型建立、管路设计、线路设计、控制方案确定、系统调试、结果分析等过程的训练。 具体要求为: 1)检索资料,熟悉传感器、执行器机械结构及工作原理。 2)熟悉CS4100过控实验装置的机械结构,进行管路设计及硬件接线; 3)掌握纯滞后水箱温度控制系统数学模型的建立方法,并建立数学模型; 4)掌握智能仪表参数调节方法; 5)进行控制方案设计,结合具体数学模型,计算系统所能达到性能指标,并通过仿真掌握控制参数的整定方法; 6)掌握系统联调的步骤方法,调试参数的记录方法,动态曲线的测定记录方法。记录实验数据,采用数值处理方法和相关软件对实验数据进行处理并加以分析,记录实验曲线,与理论分析结果对比,得出有意义的结论。 7)撰写实验设计报告、实验报告,具体要求见:(五)实践报告的内容与要求。 二、实验仪器设备与器件 1.CS4100过程控制实验装置 2.PC机(组态软件) 3.P909智能仪表若干
双容水箱液位控制系统
内蒙古科技大学 控制系统仿真课程设计说明书 题目:双容水箱液位控制系统 仿真 学生姓名:任志江 学号:1067112104 专业:测控技术与仪器 班级:测控 10-1班 指导教师:梁丽
摘要 随着工业生产的飞速发展,人们对生产过程的自动化控制水平、工业产品和服务产品质量的要求也越来高。每一个先进、实用控制算法和监测算法的出现都对工业生产具有积极有效的推动作用。然而,当前的学术研究成果与实际生产应用技术水平并不是同步的,通常情况下实际生产中大规模应用的算法要比理论方面的研究滞后几年,甚至有的时候这种滞后相差几十年。这是目前控制领域所面临的最大问题,究其根源主要在于理论研究尚缺乏实际背景的支持,一旦应用于现场就会遇到各种各样的实际问题,制约了其应用。本设计设计的课题是双容水箱的PID液位控制系统的仿真。在设计中,主要针对双容水箱进行了研究和仿真。本文的主要内容包括:对水箱的特性确定与实验曲线分析,通过实验法建立了液位控制系统的水箱数学模型,设计出了控制系统,针对所选液位控制系统选择合适的PID算法。用MATLAB/Simulink建立液位控制系统,调节器采用PID控制系统。通过仿真参数整定及各个参数的控制性能,对所得到的仿真曲线进行分析,总结了参数变化对系统性能的影响。 关键词:MATLAB;PID控制;液位系统仿真
目录 第一章控制系统仿真概述 (2) 1.1 控制系统计算机仿真 (2) 1.2 控制系统的MATLAB计算与仿真 (2) 第二章 PID控制简介及其整定方法 (6) 2.1 PID控制简介 (6) 2.1.1 PID控制原理 (6) 2.1.2 PID控制算法 (7) 2.2 PID 调节的各个环节及其调节过程 (8) 2.2.1 比例控制与其调节过程 (8) 2.2.2 比例积分调节 (9) 2.2.3 比例积分微分调节 (10) 2.3 PID控制的特点 (10) 2.4 PID参数整定方法 (11) 第三章双容水箱液位控制系统设计 (12) 3.1双容水箱结构 (12) 3.2系统分析 (12) 3.3双容水箱液位控制系统设计 (15) 3.3.1双容水箱液位控制系统的simulink仿真图 (15) 3.3.2双容水箱液位控制系统的simulink仿真波形 (16) 第四章课程设计总结 (17)
前馈反馈控制系统指导书
四、实验内容与步骤 本实验选择中水箱和下水箱串联作为被控对象,实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-2、F1-7、F2-1、F2-5全开,将阀门F1-10、F1-11开至适当开度(阀F1-10>F1-11),其余阀门都关闭。 具体实验内容与步骤按五种方案分别叙述,这五种方案的实验与用户所购的硬件设备有关,可根据实验需要选做或全做。 (一)、智能仪表控制 1.将SA-11挂件、SA-12挂件、SA-14挂件挂到屏上,并将SA-12挂件的通讯线接头插入屏内RS485通讯口上,将控制屏右侧RS485通讯线通过RS485/232转换器连接到计算机串口2,并按照下面的控制屏接线图连接实验系统。将“FT2变频器支路流量”、“LT3下水箱液位”钮子开关拨到“ON”的位置。SA-14上比值器的调节旋钮放在最小的位置。 图7-4 仪表控制下水箱液位前馈-反馈控制实验接线图 2.接通总电源空气开关和钥匙开关,打开24V开关电源,给压力变送器及涡轮流量计上电,按下启动按钮,合上单相Ⅰ、单相Ⅲ空气开关,给智能仪表及电动调节阀上电。 3.打开上位机MCGS组态环境,打开“智能仪表控制系统”工程,然后进
入MCGS运行环境,在主菜单中点击“实验二十一、下水箱液位前馈反馈控制系统”,进入实验二十一的监控界面。 4.设定工作点(u0,h0)。在上位机监控界面中将智能仪表设置为“手动”输出,并将输出值设置为一个中间合适的值(例u0=50%),此操作也可通过调节仪表实现。 5.合上三相电源空气开关,磁力驱动泵上电打水,通过调节F1-10、F1-11的开度,使下水箱的液位平衡于一个中间合适的值(例h0=8)。 6.设置智能仪表的输出值为100%,观察下水箱液位的稳态值hmax,则在以下实验中,设定值不能超过hmax。若hmax>18,则重新设定u0=50%,转5重新调整。 7、在工作点(u0,h0)处,用开环整定法整定静态前馈放大系数K F。即令U0保持不变,开启变频器,以较小频率给中水箱(或下水箱)打水加干扰(要求扰动量为控制量的5%~15%,干扰过大可能造成水箱中水溢出或系统不稳定),由小到大调节SA-14上比值器的旋钮,观察前馈补偿的作用,直到液位基本回复到h0。静态放大系数的设置方法可用万用表量得比值器输入输出电压之比即可。 8.关闭变频器,SA-14上的调节旋钮保持不变。 9、将调节器切换到“自动”状态,按单回路的整定方法整定调节器参数,并按整定得到的参数进行调节器设定。 10.待液位平衡后(u1,h1),打开阀门F2-4或F2-5,合上单相Ⅱ电源空气开关启动变频器支路以较小频率给中水箱(或下水箱)打水加干扰(要求扰动量为控制量的5%~15%,干扰过大可能造成水箱中水溢出或系统不稳定),记录下水箱液位的响应过程曲线。 11.关闭变频器,用单回路控制使回复到工作点(u1,h1)。 12、将“FT2变频器支路流量”钮子开关拨到“OFF”的位置,即去掉前馈补偿,构成双容水箱液位定值控制系统。重复步骤10,用计算机记录系统的响应曲线,比较该曲线与加前馈补偿的实验曲线有什么不同。 请及时拍照记录曲线! 下水箱压力传感器有问题,可改用上水箱和中水箱,阀的开闭以及被控变量应做相应改变。请思考:用上水箱和中水箱串联作为被控对象与用中水箱和下水箱串联作为被控对象,哪个更容易控制,为什么? 用阀门F2-4和F2-5加入扰动有何区别?
单容水箱液位控制系统的设计
单容水箱液位控制系统辨识 一、单容水箱液位控制系统原理 单容水箱液位控制系统是一个单回路反馈控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动的影响。单回路控制系统由于结构简单、投资省、操作方便、且能满足一般生产过程的要求,故它在过程控制中得到广泛地应用。图1-1为单容水箱液位控制系统方块图。 当一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数的选择有着很大的关系。合适的控制参数,可以带来满意的控制效果。反之,控制器参数选择得不合适,则会导致控制质量变坏,甚至会使系统不能正常工作。因此,当一个单回路系统组成以后,如何整定好控制器的参数是一个很重要的实际问题。一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。图1-2是单容液位控制系统结构图。 图1-1 单容水箱液位控制系统的方块图系统由原来的手动操作切换到自动操作时,必须为无扰动,这就要求调节器的输出量能及时地跟踪手动的输出值,并且在切换时应使测量值与给定
值无偏差存在。图1-2 是单容水箱液位控制系统结构图。 一般言之,具有比例(P )调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。比例积分(PI )调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti 选择合理,也能使系统具有良好的动态性能。 图1-2 单容液位控制系统结构图 比例积分微分(PID )调节器是在PI 调节器的基础上再引入微分D 的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。在单位阶跃作用下,P 、PI 、PID 调节系统的阶跃响应分别如图1-3中的曲线①、②、③所示。 图1-3 P 、PI 和PID 调节的阶跃响应曲线 二、单容水箱液位控制系统建模 .
思考题
单容自衡水箱液位特性测试实验 五、实验报告要求 1.画出“单容水箱液位特性测试”实验的结构框图。 2.根据实验得到的数据及曲线,分析并计算出单容水箱液位对象的参数及传递函数。 六、思考题 1.做本实验时,为什么不能任意改变出水阀F1-11开度的大小? 如果实验条件中没有水量大小,及水量是恒定的,肯定不能改变水流大小,不然在其他外因发生变化时产生的测试结果就不能完全归结于该外因变化的结果,可能还存在水流大小变化的影响。 2.用响应曲线法确定对象的数学模型时,其精度与那些因素有关? 答:因为系统用到了仪表,因此与仪表的精度有关,同时与出水阀开度的大小有关。并和放大系数K、时间常数T以及纯滞后时间有关。 3.如果采用上水箱做实验,其响应曲线与下水箱的曲线有什么异同?并分析差异原因。
双容(串联)水箱特性的测试 五、实验报告要求 1.画出双容(串联)水箱液位特性测试实验的结构框图。 2.根据实验得到的数据及曲线,分析并计算出双容水箱液位对象的参数及传递函数。 3.综合分析几种控制方案的实验效果。 六、思考题 1.做本实验时,为什么不能任意改变两个出水阀门开度的大小? 对设定的给定值会有影响 2.用响应曲线法确定对象的数学模型时,其精度与那些因素有关? 与k和T有关 3.引起双容对象滞后的因素主要有哪些? K,T及时间常数 单容液位定值控制系统 五、实验报告要求 1.画出单容水箱液位定值控制实验的结构框图。 2.用实验方法确定调节器的相关参数,写出整定过程。 3.根据实验数据和曲线,分析系统在阶跃扰动作用下的静、动态性能。 4.比较不同PID参数对系统的性能产生的影响。 5.分析P、PI、PD、PID四种控制规律对本实验系统的作用。 6.综合分析多种控制方案的实验效果。
过程控制前馈反馈实验报告
过程控制工程实验 报告
实验名称:前馈-反馈控制系统 班级: 组员: 思考题: 1.前馈控制器的参数整定应按什么要求? 在整定Kff时,反馈控制器必须具有积分作用,否则在干扰作用下无法消除被控变量的余差。同时要求工况稳定,以避免其他干扰的影响。整定T1和T2时,因为过补偿往往是前馈控制系统的危险之源,它会破坏控制过程,甚至达到不允许的程度,相反,欠补偿却是寻求合理的前馈参数的途径。欠补偿的结果总比反馈过程好一些,它倾向于安全的一边,因此在动态参数整定时,应从欠补偿开始,逐步强化前馈作用,即增大T1或减小T2,直到出现过补偿的趋势再略减弱前馈作用。 2.试比较反馈控制和前馈-反馈控制在施加相同干扰时的控制效果,说明其差别并解释原因。 阶跃增加时反馈和前馈反馈比较 t/3s 从20到30为反馈调节,30到40为前馈反馈调节。
0510152025303540阶跃减小时反馈和前馈反馈比较 t/3s % 40到30为前馈反馈调节,30到20为反馈调节。 由实验结果比较可知,前馈反馈控制比单回路反馈控制更及时,波动更小。 原因:前馈是按照干扰作用的大小进行控制的,而被控变量偏差产生的直接原因是干扰作用,因此当干扰一出现,前馈控制器就直接根据检测到的干扰,按一定的规律去进行控制。这样,当干扰发生后,被控变量还未发生变化,前馈控制器就产生了控制作用,所以前馈反馈控制比反馈更及时。 3.试比较静态前馈补偿和动态前馈补偿的补偿效果,说明其差别并解释原因。 动态反馈补偿比静态反馈补偿更及时,补偿效果更好。因为动态前馈补偿要求在任何时刻均实现对干扰的补偿,而静态前馈补偿只需要在稳态工况下实现对干扰量的补偿。所以动态前馈补偿比静态前馈补偿补偿更及时,效果更好。 4.(自控专业必做)用matlab 仿真前馈-反馈控制方案。 0.6 0.8 1 1.21.4 无扰动时反馈控制时的仿真 %