智能循迹小车详细制作过程
(穿山乙工作室)
三天三十元做出智能车
0.准备所需基本元器件
1).基本二驱车体一台。(本课以穿山乙推出的基本车体为例讲解)
2).5x7cm 洞洞板、单片机卡槽、51单片机、石英晶体、红色LED 、1K 电阻、10K 排阻各一个;2个瓷片电容、排针40个。
3).5x7cm 洞洞板、7805稳压芯片、红色LED 、1K 电阻各一个;双孔接线柱三个、10u 电解电容2个、排针12个、9110驱动芯片2个。
4).5x7cm 洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K 电阻3个、330电阻三个、红色3mmLED 三个。
一、组装车体
基本设计思路:
1.基本车架(两个电机一体轮子+一个万向轮)
2.单片机主控模块
3.电机驱动模块(内置5V 电源输出)
4.黑白线循迹模块
(图中显示的很清晰吧,照着上螺丝就行了)
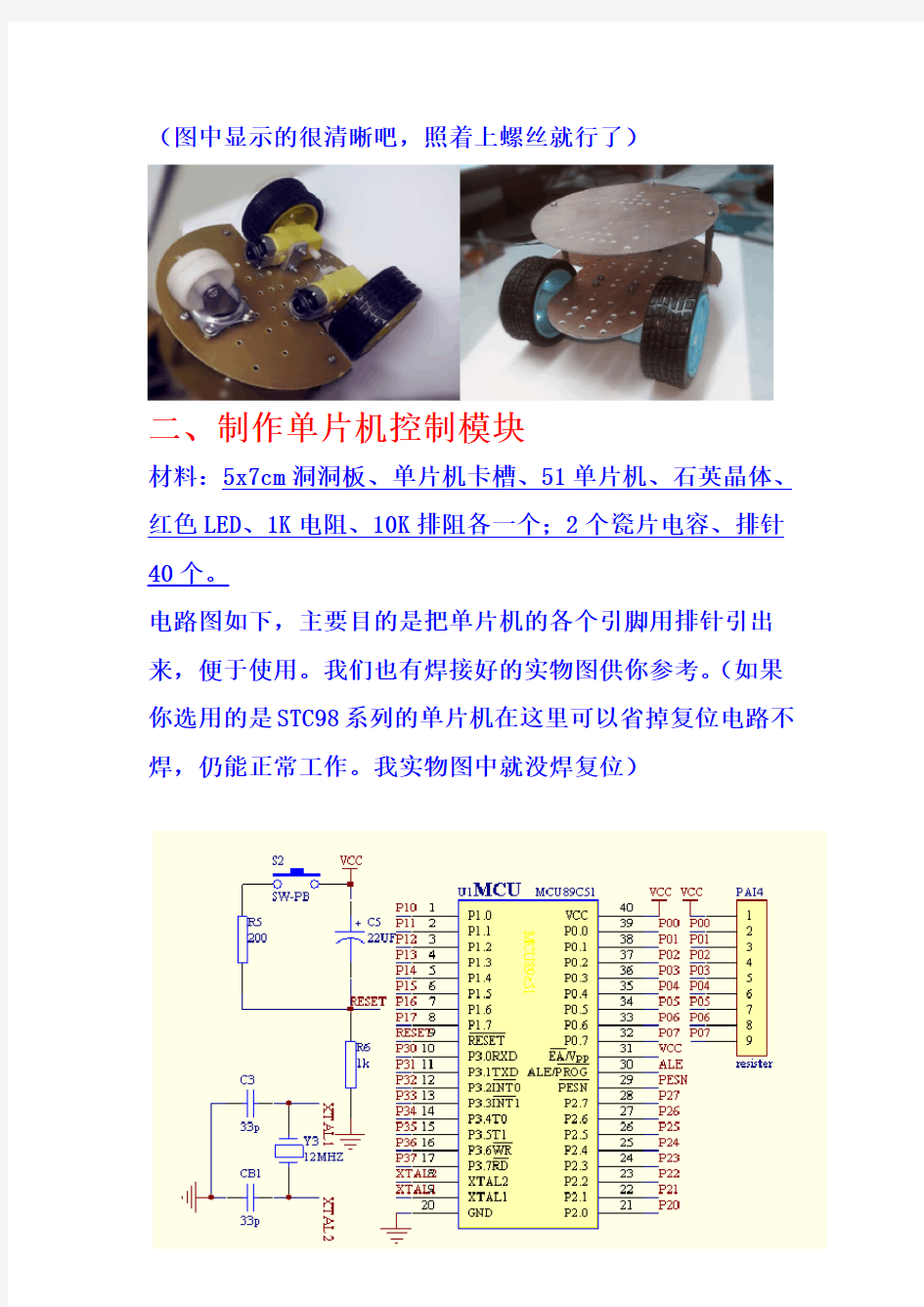
二、制作单片机控制模块
材料:5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。
电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位)
三、制作电机驱动模块
材料:5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。
电路图如下,这里我们把电源模块与驱动模块含在了同一个电路板上。因为电机驱动模块所需的电压是+9V左右(6—15V 均可),而单片机主控和循迹模块所需电压均为+5V。
这里用了一个7805稳压芯片将+9V电压稳出+5V电压。
+9V
这是工作室做的电源+驱动模块,仅作参考
四、制作循迹模块
材料:5x7cm洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K电阻3个、330电阻三个、红色3mmLED三个。
LM324电压比较器工作原理:
该芯片内部有四组比较器,原理就是反相输入端Vi—与同相输入端Vi+的电压进行比较,若Vi+大于Vi—则比较器的输出端OUT输出高电平+5V;若Vi+小于Vi—则比较器的输出端OUT输出低电平0V;
TCRT5000红外对管工作原理:
工作时由蓝色发射管发射红外线,红外线由遮挡物反射回来被接收管接收。接收反射光线后的接收管呈导通状态,与一电阻串联即可构成一个由发射管控制的分压电路,由此可实现对遮挡物反射光线强度的检测。我们经常利用这一特性去实现黑白颜色识别。
在小车行驶过程中发射管不断地向地面发射红外光,当红外光遇到白
色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到
黑线则红外光被吸收,则小车上的接收管接收不到信号。如图12轨
迹识别电路所示,发射管(1、2端)与阻值为330欧姆的电阻串联
发射红外线。接收管(3、4)与阻值为47K欧姆的电阻串联。在没有
接收到反射光线时接收管截止呈高阻态,TX输出高电平。当接收管
接收到反射光线时,接收管被导通,并且电阻远小于47K,TX输出低
电平。
五、组装连接各模块
供电分配:
单片机主控模块 5V 电机驱动模块 7V-12V 黑白线循迹模块 5V
电机驱动输入端分别接单片机的
P0.0、P0.1、
P0.2、P0.3
(这里建议大家把电机驱动输入端接到单片机的P0上,因为P0口我们外接有上拉电阻,
其他IO 口虽然集成上拉电阻但驱动能力太弱,很不稳定。如果你把驱动输入端接到P0口仍不太受控,可以尝试将上拉电阻改为1K 或更小的。)
循迹模块输出端分别接单片机的P1.0、P1.1、P1.2
注:分别对应 右边的光电管输出端 (从循迹板对应的右边光电管信号输出端接至单片机P1.0)、左边的光电管输出端(从循迹板对应的左边光电管信号输出端接至单片机P1.1)、前边的光电管输出端(从循迹板对应的前边光电管信号输出端接至单片机P1.2)
六、各种路线分析
七、小车运动状态设计
八、简单的三路循迹算法设计
源程序请到论坛智能车讨论区下载。
该算法仅供参考,(软件需要配合硬件不同的接法)具体程序代码应由实际情况调试得出!!!
源程序请到穿山乙工作室下载
链接地址:
https://www.360docs.net/doc/484064173.html,/bbs/forum.php?mod=viewthread&tid=806&extra=page%3D1
左电机 P0.2 P0.3 LA LB 0 0 不转 0 1 前转 1 0 后转 1 1 不转 右电机 P0.0 P0.1 RA RB 0 0 不转 0 1 前转 1 0 后转 1 1 不转 单片机------电机驱动模块------小车 P0.2 P0.3 P0.0 P0.1
1 0 1 前进 1
0 1 0 后退 1
0 0 1 左转弯 0
1 1 0 右转弯
基于单片机的智能寻迹小车毕业设计
基于单片机的智能寻迹小车毕业设计 系统主要由红外避障模块、声控模块、光电寻迹、电机驱动及语音播报模块组成。 采用P89V51单片机作为智能小车控制核心。系统能实现对线路进行寻迹,小 车可以 前进或后退,遇到障碍物可以自行停止并可以实现反向运行,系统可以利用声 音控 制小车的启停。整个系统小巧紧凑,控制准确,性价比高,人机互动性好。 P89V51单片机;红外避障;线路寻迹;直流减速电机 ABSTRACT System is mainly by infrared obstacle avoidance module, voice module, opto-electronics and motor drive tracing module. Used as a single- chip smart car P89V51 control core. System can realize the tracing lines, cars can go forward or backward, encountered obstacles can stop and reverse operation can be achieved, the system can use voice to control the start and stop car. Compact the entire system to control the accurate, cost-effective, good human-computer interaction. KEYWORD: P89V51MCU;Infrared obstacle avoidance;Tracing;DC motor speed 1
智能循迹小车设计与实现
智能循迹小车设计与实现 摘要本文介绍的是基于单片机STC89C52控制智能循迹小车的设计。利用红外对光管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的运动,从而实现自动循迹避障的功能。其中小车的电机由LG9110驱动,整个系统的电路结构简单,可靠性高。 关键词STC89C52 LG9110 红外对光管循迹小车
The manufacture of intelligent tracking car Abstract This articale introduces the design of intelligent tracking car based on the STC89C52 single chip computer.Based infrared detection of black lines and the road obstacles,and use a STC89C52 MCU as the controlling core for the movement.A electronic drived,which can automatic track and avoid obstacle,was designed and fabricated.In which,the electric machinery of car is drived by the LG9110.The electric circuit stuction of whole system is simple,and the function is dependable. Keywords STC89C52 LG9110 Infrared emitting diode Tracking car
智能循迹小车程序
#include
基于STC89C52单片机-红外智能循迹小车 (1)
基于STC89C52单片机红外智能循迹小车 实验报告册 学院:电气工程学院 协会:电子科技协会 班级:电气1206 班 姓名:蔡申申 学号:201223910625 联系方式:151 **** ****
摘要 本报告论述了自己参加第八届河南工业大学科技创新大赛——基于STC89C52RC单片机红外智能循迹小车的方案论证、制作过程、调试过程。设计采用STC89C52RC单片机为核心控制器件,采用TCRT5000红外反射式开关传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号,单片机获取路面信息后,进行分析、处理,最后控制减速电机转动实现转向。实验表明:该系统抗干扰能力强、电路结构简单、制作成本低,运行平稳、可靠性好。 关键词:STC89C52单片机、反射式光电对管、PWM调速 减速电机
目录 摘要 (2) 1 绪论 (4) 1.1 智能循迹小车概述 (4) 1.1.1 循迹小车的发展历程回顾 (4) 1.1.2 智能循迹分类 (4) 1.1.3 智能循迹小车的应用 (5) 2 智能循迹小车总体设计方案 (5) 2.1 整体设计方案 (5) 2.1.1 系统设计步骤 (5) 2.1.2 系统基本组成 (5) 2.2 整体控制方案确定 (6) 3 系统的硬件设计 (6) 3.1 单片机电路的设计 (6) 3.1.1 单片机的功能特性描述 (6) 3.1.2 晶振电路 (7) 3.1.3 复位电路 (7) 3.2 光电传感器模块 (8) 3.2.1 传感器分布 (8) 3.3 电机驱动电路 (9) 3.3.1 L298N引脚结构 (9) 3.3.2 电机驱动原理 (9) 4 系统的软件设计 (10) 4.1 软件设计的流程 (10) 4.2 本系统的编译器 (10) 5 系统的总体调试 (11) 5.1 硬件的测试 (11) 5.2 系统的软件调试 (11) 结论 (11) 致谢 (11) 参考文献 (12) 附录A 原理图与模块电路图 (12) 附录B 程序代码 (13) 附录C 硬件实物图 (15)
智能循迹小车详细制作过程
(穿山乙工作室)三天三十元做出智能车 基本设计思路: 1.基本车架(两个电机一体轮子+一 个万向轮) 2.单片机主控模块 3.电机驱动模块(内置5V电源输出) 4.黑白线循迹模块 0.准备所需基本元器件 1).基本二驱车体一台。(本课以穿山乙推出的基本车体为 例讲解) 2).5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红 色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40 个。 3).5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一 个;双孔接线柱三个、10u电解电容2个、排针12个、9110 驱动芯片2个。 4).5x7cm洞洞板、LM324比较器芯片各一个;红外对管三 对、4.7K电阻3个、330电阻三个、红色3mmLED三个。 一、组装车体
(图中显示的很清晰吧,照着上螺丝就行了) 二、制作单片机控制模块 材料:5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。 电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位)
三、制作电机驱动模块 材料:5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。 电路图如下,这里我们把电源模块与驱动模块含在了同一个电路板上。因为电机驱动模块所需的电压是+9V左右(6—15V 均可),而单片机主控和循迹模块所需电压均为+5V。 这里用了一个7805稳压芯片将+9V电压稳出+5V电压。
智能循迹小车___设计报告
智能循迹小车设计 专业:自动化 班级:自动化132 姓名:罗植升莫柏源梁桂宾 指导老师: 2014年4月——2010年6月 摘要:
本课题是基于STC89C52单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。小车系统以 STC89C52单片机为系统控制处理器;采用红外传感获取赛道的信息,来对小车的方向和速度进行控制。此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。 引言
当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。现在国外的自动控制和传感器技术已经达到了很高的水平,特别是日本,比如日本本田制作的机器人,其仿人双足行走已经做得十分逼真,而且具有一定的学习能力,还据说其智商已达到6岁儿童的水平。 作为机械行业的代表产品—汽车,其与电子信息产业的融合速度也显著提高,呈现出两个明显的特点:一是电子装置占汽车整车(特别是轿车)的价值量比例逐步提高,汽车将由以机械产品为主向高级的机电一体化方向发展,汽车电子产业也很有可能成为依托整车制造业和用车提升配置而快速成为新的增长点;二是汽车开始向电子化、多媒体化和智能化方向发展,使其不仅作为一种代步工具、同时能具有交通、娱乐、办公和通讯等多种功能。 无容置疑,机电一体化人才的培养不论是在国外还是国内,都开始重视起来,主要表现在大学生的各种大型的创新比赛,比如:亚洲广播电视联盟亚太地区机器人大赛(ABU ROBCON)、全国大学生“飞思卡尔”杯智能汽车竞赛等众多重要竞赛都能很好的培养大学生对于机电一体化的兴趣与强化机电一体化的相关知识。但很现实的状况是,国内不论是在机械还是电气领域,与国外的差距还是很明显的,所以作为机电一体化学生,必须加倍努力,为逐步赶上国外先进水平并超过之而努力。 为了适应机电一体化的发展在汽车智能化方向的发展要求,提出简易智能小车的构想,目的在于:通过独立设计并制作一辆具有简单智能化的简易小车,获得项目整体设计的能力,并掌握多通道多样化传感器综合控制的方法。所以立“智能循迹小车”一题作为尝试。 此项设计是在以杨老师提供的小车为基础上,采用AT89C52单片机作为控制核心,实现能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
智能循迹小车C程序(完美-详尽)
-----------------------小车运行主程序------------------- -------------------------------------------------------- 简介:@模块组成:红外对管检测模块----五组对管,五个信号采集端口 直流电机驱动模块----驱动两个直流电机,另一个轮子用万向轮 单片机最小系统------用于烧写程序,控制智能小车运动 @功能简介:在白色地面或皮质上用黑色胶带粘贴出路线路径宽度微大于相邻检测管间距。 这样小车便可在其上循迹运行。 @补充说明:该程序采取“右优先”的原则: 即右边有黑线向右转, 若无,前方有黑线,向前走, 若无,左边有黑线,向左转, 若全无,从右方向后转。 程序开头定义的变量的取值是根据我的小车所调试选择好的, 如果采用本程序,请自行调试适合自己小车的合适参数值。 编者:陈尧,黄永刚(江苏大学电气学院二年级,三年级) 1.假定:IN1=1,IN3=1时电机正向转动,必须保证本条件 2.假定:遇到白线输出0,遇到黑线输出1; 如果实际电路是:遇到白线输出1,遇到黑线输出0, 这种情况下只需要将第四,第五句改成: #define m0 1 #define m1 0 即可。 3.说明1:直行---------------速度full_speed_left,full_speed_right. 转弯,调头速度------correct_speed_left,correct_speed_right. 微小校正时---------高速轮full_speed_left,full_speed_right; 低速轮correct_speed. 可以通过调节第六,七,八,九,十条程序,改变各个状态 下的占空比(Duty cycle ),以求达到合适的转弯,直行速度 4.lenth----------length检测到黑线到启动转动的时间间隔 5.width----------mid3在黑线上到脱离黑线的时间差 6.mid3-----------作为判断中心位置是否进入黑线的标志,由于运行的粗糙性和惯性, 常取其他对管的输出信号作为判断条件 7.check_right----若先检测到左边黑线,并且左边已出黑线,判断右端是否压黑线时间拖延
智能循迹小车总体设计方案
智能循迹小车总体设计方案 1.1 整体设计方案 本系统采用简单明了的设计方案。通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块黑线路经,然后由AT89S52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现小车循迹。 1.2系统设计步骤 (1)根据设计要求,确定控制方案; (2)将各个模块进行组装并进行简单调试; (3)画出程序流程图,使用C语言进行编程; (4)将程序烧录到单片机内; (5)进行调试以实现控制功能。 1.2.1系统基本组成 智能循迹小车主要由AT89S52单片机电路、循迹模块、L298N驱动模块、直流电机、小车底板、电源模块等组成。 (1)单片机电路:采用AT89S52芯片作为控制单元。AT89S52单片机具有低成本、高性能、抗干扰能力强、超低功耗、低电磁干扰,并且与传统的8051单片机程序兼容,无需改变硬件,支持在系统编程技术。使用ISP可不用编程器直接在PCB板上烧录程序,修改、调速都方便。 (2)循迹模块:采用脉冲调制反射红外发射接收器作为循迹传感器,调制信号带有交流分量,可减少外界的大量干扰。信号采集部分就相
当于智能循迹小车的眼睛,有它完成黑线识别并产生高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动循迹。 (3)L298N驱动模块:采用L298N作为点击驱动芯片。L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一片L298N可以分别控制两个直流电机,并且带有控制使能端。该电机驱动芯片驱动能力强、操作方便、稳定性好,性能优良。L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。
51红外循迹小车报告(舵机版)最终版
简易教程
前言 往届全国大学生电子设计竞赛曾多次出现了集光、机、电于一体的简易智能小车题目,此次,笔者在通过多次论证、比较与实验之后,制作出了简易小车的寻迹电路系统。 整个系统基于普通玩具小车的机械结构,利用小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。系统分为检测、控制、驱动三个模块。首先利用光电对接收管和路面信号进行检测,然后经过比较器处理,对软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。 智能小车能在画有黑线的白纸“路面”上行驶,这是由于黑线和白纸对光线的反射系数不同,小车可根据接收到的反射光的强弱来判断“道路”---黑线,最终实现简单的循迹运动。 个人水平有限,有错误不足之处,还望各位前辈同学多多包含,指出修正,完善。谢谢! 李学云王维 2016年7月27号
目录 前言 (1) 第一部分硬件设计 (1) 1.1 车模选择 (1) 1.2传感器选择 (1) 1.3 控制模块选择 (2) 第二部分软件设计及调试 (3) 2.1 开发环境 (3) 2.2总体框架 (3) 2.3 舵机程序设计与调试 (3) 2.3.1 程序设计 (3) 2.3.2 调试 (3) 2.3.3 程序代码 (4) 2.4 传感器调试 (5) 2.4.1 传感器好坏的检测 (5) 2.4.2 单片机能否识别信号并输出信号 (5) 2.5 综合调试 (7) 附录1 (9) 第一篇舵机(舵机及转向控制原理) (9) 1.1概述 (9) 1.2舵机的组成 (10) 1.3舵机工作原理 (11) 1.4舵机使用中应注意的事项 (12) 1.5如何利用程序实现转向 (12) 1.6舵机测试程序 (13) 附录2 (14) 第二篇光电红外传感器 (14) 2.1传感器的原理 (14) 2.2红外光电传感器ST188 结构图 (15) 2.3传感器的选择 (15) 2.4传感器的安装 (16) 2.5使用方法 (16) 2.7红外传感器输入输出调试程序 (17)
智能循迹避障小车方案设计书
封面
作者:PanHongliang 仅供个人学习 目录 摘要………………………………………………………………………………………2 ABSTRACT………………………………………………………………………………
…2 第一章绪论 (3) 1.1智能小车的意义和作用 (3) 1.2智能小车的现状 (3) 第二章方案设计与论证 (4) 2.1 主控系统 (4) 2.2 电机驱动模块 (4) 2.3 循迹模块 (6) 2.4 避障模块 (7) 2.5 机械系统 (7) 2.6电源模块 (8) 第三章硬件设计 (8) 3.1总体设计 (8) 3.2驱动电路 (9) 3.3信号检测模块 (10) 3.4主控电路 (11) 第四章软件设计 (12) 4.1主程序模块 (12) 4.2电机驱动程序 (12) 4.3循迹模
块 (13) 4.4避障模块 (15) 第五章制作安装与调试 (18) 结束语 (18) 致谢……………………………………………………………………………………… 19 参考文献 (19) 智能循迹避障小车 摘要:利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由 L298N驱动电路完成,速度由单片机输出的PWM波控制。 关键词:智能小车;STC89C52单片机; L298N;红外对管 Intelligent tracking and obstacle-avoid car Abstract:Based infrared detection of black lines and theroad obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car。STC89C52 MCU。L298N。Infrared Emitting Diode 第一章绪论 1.1智能小车的意义和作用 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。 随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视
智能循迹小车C程序完美详尽
/*------------------------------------------------------ -----------------------小车运行主程序------------------- -------------------------------------------------------- 简介:@模块组成:红外对管检测模块----五组对管,五个信号采集端口 直流电机驱动模块----驱动两个直流电机,另一个轮子用万向轮 单片机最小系统------用于烧写程序,控制智能小车运动 @功能简介:在白色地面或皮质上用黑色胶带粘贴出路线路径宽度微大于相邻检测管间距。 这样小车便可在其上循迹运行。 @补充说明:该程序采取“右优先”的原则: 即右边有黑线向右转, 若无,前方有黑线,向前走, 若无,左边有黑线,向左转, 若全无,从右方向后转。 程序开头定义的变量的取值是根据我的小车所调试选择好的, 如果采用本程序,请自行调试适合自己小车的合适参数值。 编者:陈尧,黄永刚(江苏大学电气学院二年级,三年级) 1.假定:IN1=1,IN3=1时电机正向转动,必须保证本条件 2.假定:遇到白线输出0,遇到黑线输出1; 如果实际电路是:遇到白线输出1,遇到黑线输出0, 这种情况下只需要将第四,第五句改成: #define m0 1 #define m1 0 即可。 3.说明1:直行---------------速度full_speed_left,full_speed_right. 转弯,调头速度------correct_speed_left,correct_speed_right. 微小校正时---------高速轮full_speed_left,full_speed_right; 低速轮correct_speed. 可以通过调节第六,七,八,九,十条程序,改变各个状态 下的占空比(Duty cycle ),以求达到合适的转弯,直行速度 4.lenth----------length检测到黑线到启动转动的时间间隔 5.width----------mid3在黑线上到脱离黑线的时间差 6.mid3-----------作为判断中心位置是否进入黑线的标志,由于运行的粗糙性和惯性, 常取其他对管的输出信号作为判断条件 7.check_right----若先检测到左边黑线,并且左边已出黑线,判断右端是否压黑线时间拖延
智能循迹小车总体设计方案
智能循迹小车总体设计方案 整体设计方案 本系统采用简单明了的设计方案。通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块黑线路经,然后由AT89S52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现小车循迹。 系统设计步骤 (1)根据设计要求,确定控制方案; (2)将各个模块进行组装并进行简单调试; (3)画出程序流程图,使用C语言进行编程; (4)将程序烧录到单片机内; (5)进行调试以实现控制功能。 系统基本组成 智能循迹小车主要由AT89S52单片机电路、循迹模块、L298N驱动模块、直流电机、小车底板、电源模块等组成。 (1)单片机电路:采用AT89S52芯片作为控制单元。AT89S52单片机具有低成本、高性能、抗干扰能力强、超低功耗、低电磁干扰,并且与传统的8051单片机程序兼容,无需改变硬件,支持在系统编程技术。使用ISP可不用编程器直接在PCB板上烧录程序,修改、调速都
方便。 (2)循迹模块:采用脉冲调制反射红外发射接收器作为循迹传感器,调制信号带有交流分量,可减少外界的大量干扰。信号采集部分就相当于智能循迹小车的眼睛,有它完成黑线识别并产生高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动循迹。 (3)L298N驱动模块:采用L298N作为点击驱动芯片。L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一片L298N可以分别控制两个直流电机,并且带有控制使能端。该电机驱动芯片驱动能力强、操作方便、稳定性好,性能优良。L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。
智能循迹小车程序代码
/**************************************************************** ************ 硬件连接 P1_4接驱动模块ENA使能端,输入PWM信号调节速度 P1_5接驱动模块ENB使能端,输入PWM信号调节速度 P1_0 P1_1接IN1 IN2 当P1_0=1,P1_1=0; 时左电机正转驱动蓝色输出 端OUT1 OUT2接左电机 P1_0 P1_1接IN1 IN2 当P1_0=0,P1_1=1; 时左电机反转 P1_2 P1_3接IN3 IN4 当P1_2=1,P1_3=0; 时右电机正转驱动蓝色输出 端OUT3 OUT4接右电机 P1_2 P1_3接IN3 IN4 当P1_2=0,P1_3=1; 时右电机反转 P1_0接四路寻迹模块接口第一路输出信号即中控板上面标记为OUT1 P1_1接四路寻迹模块接口第二路输出信号即中控板上面标记为OUT2 P1_2接四路寻迹模块接口第三路输出信号即中控板上面标记为OUT3 P1_3接四路寻迹模块接口第四路输出信号即中控板上面标记为OUT4 八路寻迹传感器有信号(白线)为0 没有信号(黑线)为1 ***************************************************************** ***********/ #include
PWM调速+循迹__智能小车程序
//T0产生双路PWM信号,L298N为直流电机调速,接L298N时相应的管脚上最好接上10K 的上拉电阻。 /* 晶振采用12M,产生的PWM的频率约为100Hz */ #include
智能循迹小车详细制作过程
(穿山乙工作室) 三天三十元做出智能车 0.准备所需基本元器件 1).基本二驱车体一台。(本课以穿山乙推出的基本车体为例讲解) 2).5x7cm 洞洞板、单片机卡槽、51单片机、石英晶体、红色LED 、1K 电阻、10K 排阻各一个;2个瓷片电容、排针40个。 3).5x7cm 洞洞板、7805稳压芯片、红色LED 、1K 电阻各一个;双孔接线柱三个、10u 电解电容2个、排针12个、9110驱动芯片2个。 4).5x7cm 洞洞板、LM324比较器芯片各一个;红外对管三对、4.7K 电阻3个、330电阻三个、红色3mmLED 三个。 一、组装车体 基本设计思路: 1.基本车架(两个电机一体轮子+一个万向轮) 2.单片机主控模块 3.电机驱动模块(内置5V 电源输出) 4.黑白线循迹模块
(图中显示的很清晰吧,照着上螺丝就行了) 二、制作单片机控制模块 材料:5x7cm洞洞板、单片机卡槽、51单片机、石英晶体、红色LED、1K电阻、10K排阻各一个;2个瓷片电容、排针40个。 电路图如下,主要目的是把单片机的各个引脚用排针引出来,便于使用。我们也有焊接好的实物图供你参考。(如果你选用的是STC98系列的单片机在这里可以省掉复位电路不焊,仍能正常工作。我实物图中就没焊复位)
三、制作电机驱动模块 材料:5x7cm洞洞板、7805稳压芯片、红色LED、1K电阻各一个;双孔接线柱三个、10u电解电容2个、排针12个、9110驱动芯片2个。 电路图如下,这里我们把电源模块与驱动模块含在了同一个电路板上。因为电机驱动模块所需的电压是+9V左右(6—15V 均可),而单片机主控和循迹模块所需电压均为+5V。 这里用了一个7805稳压芯片将+9V电压稳出+5V电压。 +9V
智能循迹小车设计
智能循迹/避障小车研究 工作报告 一、智能循迹小车程序结构框图 二、Proteus仿真图 三、软件程序设计
一、智能循迹小车程序结构框图 经过几天在网上的查找,对智能循迹/避障小车有了大致的了 解, 一般有三个模块: 1、最基本的小车驱动模块,使用两个二相四线步进电机对小车的两个后轮分别进行驱动,前轮最好用万向轮,能使小车更好地转弯; 2、小车循迹模块,在小车底部有三个并排安装的红外对管,对黑色与白色的反射信号不同,经单片机处理后对小车进行相应处理; 3、避障模块,我写的程序中对于避障模块是用中断来处理的(即安装在小车车头的红外对管检测到有障碍物后,就会向单片机的P3_2口输出一个高电平或是低电平,这时中断程序将对小车进行预先设定好的避障处理),但是在程序结构框图中,我不太会表示中断处理方式,所以就用查询的方式画了。
N Y N Y 二、Proteus 仿真图 我用Proteus 大概地仿真了小车的运行状态。图中的两个二相四线步进电机就代表小车的左右轮(假定步进电机顺时针转动方向为小车前进方向),网上有很多种驱动芯片,在仿真时我只使用L298N 芯
片来驱动步进电机。用三个单刀双制开关模拟用于小车循迹的三个红外对管的输出信号,经一个与门与三极管开关连接到P3_3口,中断程序对P1_0, P1_1, P1_2三个口进行检测,并做出相应处理。同时因为避障模块的优先级高于循迹模块,所以将外部中断0用于避障,外部中断1用于循迹。P1_3口则用于检测小车是否到达终点。 1、小车驱动模块: 使用一片298芯片驱动一个二相四线步进电机,电机的电压为12V。
智能循迹避障小车设计
摘要 本系统以设计题目的要求为目的,采用80C51单片机为控制核心,利用红外线传感器进行寻线,控制电动小汽车的自动循迹,并再通过光电开关探测障碍,从而控制电机转向,实现进行壁障功能。整个系统的电路结构简单,可靠性能高,实验测试结果满足要求。本文着重叙述了该系统的硬件设计方法、软件设计方法及测试结果分析。小车运行方案,在现有玩具电动车的基础上,加装红外线光电开关模块和红外寻线模块,实现对电动车位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。 关键词:80C51单片机、红外线传感器、光电开关、电动小车
Abstract The system requirements of the design project for the purpose of the 80C51 microcontroller for the control of the core,the use of the hunt and infrared sensors,automatic obstacle acoidance control of electric cars,and the photoelectric switch to the barrier function.The electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyse. Car is running the program, under the existing toy electric car, based on the installation of super sonic sensor and infrared sensors, to achieve the location of electric vehicles,operational status of the real-time measurement, and measurement data sent to the microcontroller for processing, then SCM detected according to a variety of data to achieve intelligent control of electric vehicles. Key words: 80C51 single chip computer, infrared sensors, photoelectric switch, the electric car
智能循迹小车程序
智能循迹小车程序 Document number:BGCG-0857-BTDO-0089-2022
#include<> #define uchar unsigned char #define uint unsigned int //D0-D7:f,b,a,e,d,h,c,g 共阴依次编码 //74LS04反相器驱动数码管 uchar code table[10] = {0x5F,0x42,0x9E,0xD6,0xC3,0xD5,0xDD,0x46,0xDF,0xD7}; uchar i = 0; //用于0-3数码管轮流显示uint j = 0; //计时的次数 uint time=0; //计时 uint pwm=16; //占空比 uint speed; //调制PWM波的当前的值 sbit R=P3^2; //右边传感器 P3^2 sbit L=P3^3; //左边传感器 P3^3 //电机驱动口定义 sbit ENB=P1^0; //前轮电机停止控制使能 sbit ENA=P1^1; //后轮控制调速控制端口 sbit IN1=P1^2; //前轮 sbit IN2=P1^3; //前轮 sbit IN3=P1^4; //后轮
sbit IN4=P1^5; //后轮 void Init() { TMOD = 0x12; //定时器0用方式2,定时器1用方式1 TH0=(256-200)/256; //pwm TL0=(256-200)/256; TH1 = 0x0F8; //定时2ms TL1 = 0x30; EA = 1; ET0 = 1; ET1 = 1; TR0 = 1; TR1 = 1; } void tim0(void) interrupt 1 //产生PWM { speed ++; if(speed <= pwm) //pwm 就相当于占100的比例{ ENA = 1; }
智能循迹小车设计方案 智能循迹小车方案
智能循迹小车设计方案智能循迹小车方案 自动化06--2班2009年6月5日自动寻迹小车摘要本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。系统由AT89S51通过IO口控制小车的前进后退以及转向。寻迹由RPR2… 各省主要风电塔架制造厂名单序号123456789101112131415161718192021222324 公司名称甘肃玉门锦辉长城甘肃科耀电力有限公司北车集团兰州金牛轨道交通装备有限公司河北强盛风电设备有限公司保定天威电气设备结构有限公司… 学习“七.一”讲话精神,深入剖析“四种危险” 胡锦涛在党庆90年大会上,总结了建党以来的“三件大事”和“两大成果”,提出了往后“两个宏伟目标”,指出中共面临“四种考验”和存在“四种危险”。整篇讲话与时俱进,有新意,有不少新提法,是一篇回顾历史、总结经…
自动化06--2班 2009年6月5日 自动寻迹小车 摘要 本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。系统由AT89S51通过IO口控制小车的前进后退以及转向。寻迹由RPR220型光电对管完成。 关键词:AT89S51 直流电机光电传感器自动寻迹电动车 Abstract The smart car is aluminum alloy for the chassis, AT89S51 MCU as its core, including motor and servo, plus photoelectric sensors, as well as other flame sensor and power circuit. MCU controls the car turning back forward or running on the white line. RPR220 reflective photo sensor seeks the trace. Far infrared flame sensor tracks the flame. In addition, the SCM system with Sunplus for voice broadcast can remind current status. The system transmits information through DF module. The car’s status will be transmitted to the Remote Console. OCMJ4X8C LCD
智能循迹小车详细源代码程序MSPID
巡线车程序(完整版) 1 #ifndef _Macro.h_ 2 #define _Macro.h_ 3 #include