双足步行机器人的结构及其控制系统设计
双足步行机器人的结构及其控制系统设计
作者:梁静强;许瑛;彭应龙
作者机构:南昌航空工业学院,航空与机械工程系,南昌,330063;南昌航空工业学院,航空与机械工程系,南昌,330063;南昌航空工业学院,航空与机械工程系,南昌,330063
来源:机械工程师
ISSN:1002-2333
年:2007
卷:000
期:003
页码:47-49
页数:3
中图分类:TP2
正文语种:chi
关键词:双足步行机器人;机构;CPLD;PWM
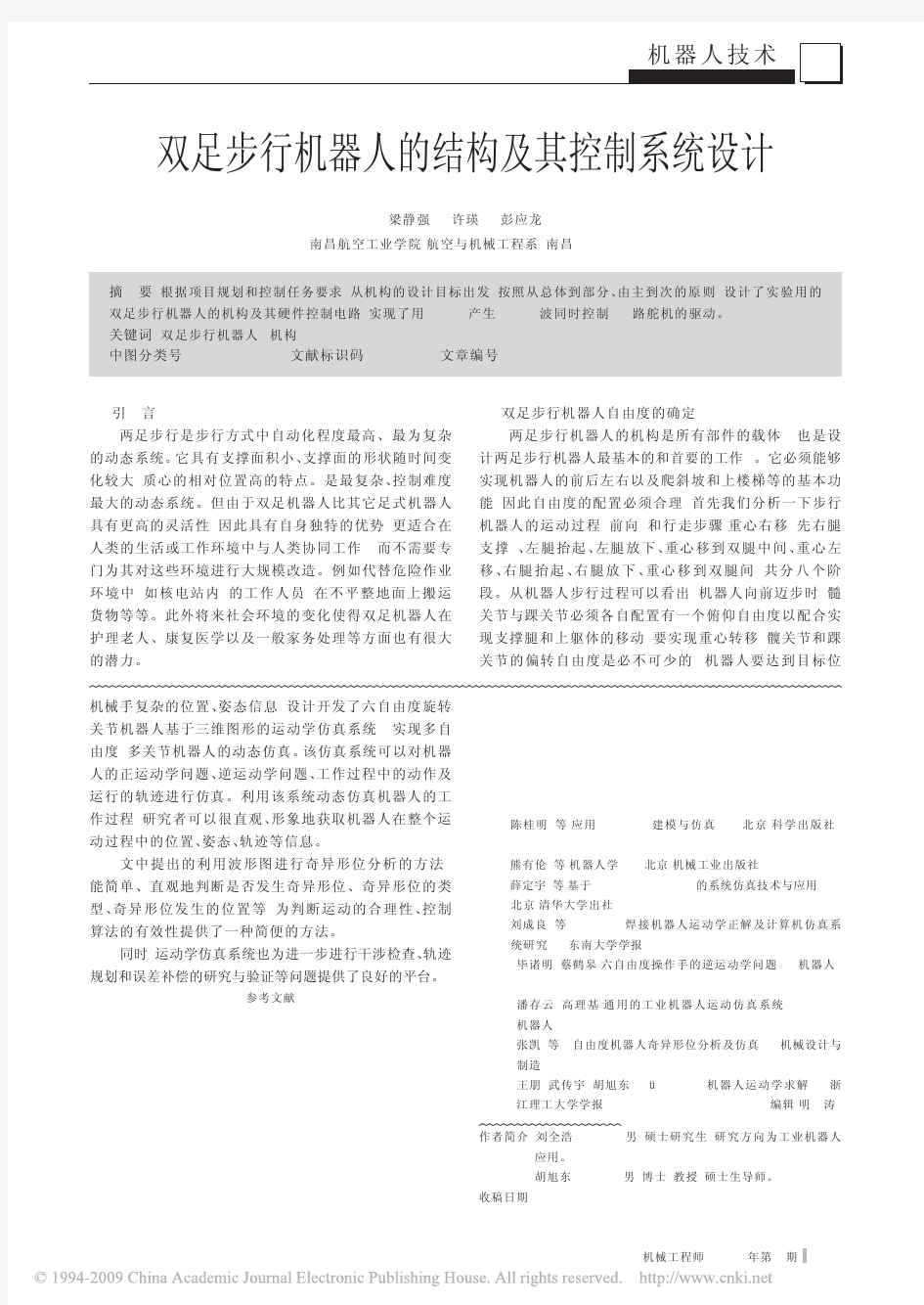
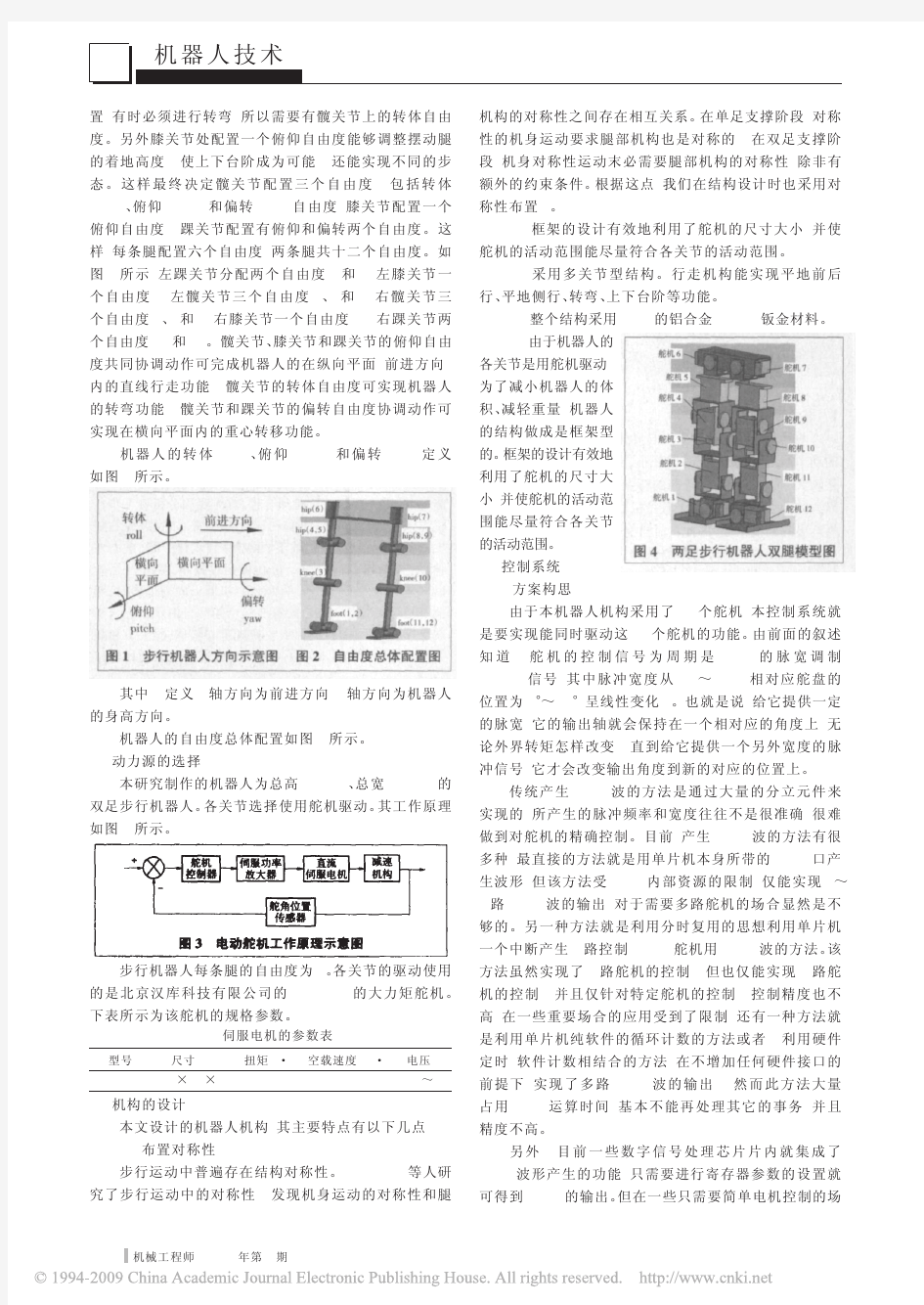
摘要:根据项目规划和控制任务要求,从机构的设计目标出发,按照从总体到部分、由主到次的原则,设计了实验用的双足步行机器人的机构及其硬件控制电路,实现了用CPLD产生PWM波同时控制12路舵机的驱动.
相关主题