平差易软件数据输入实例

导线实例
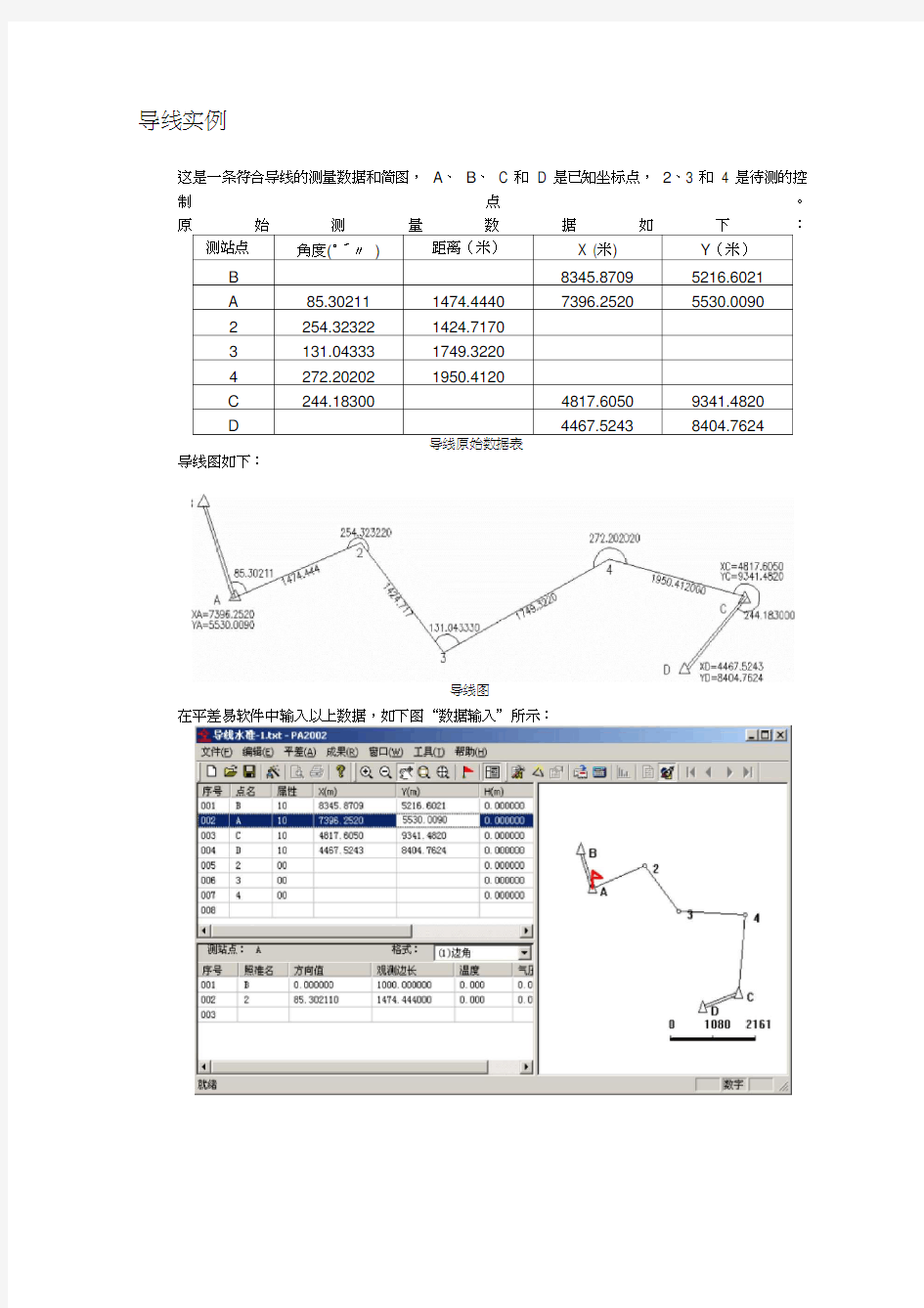
这是一条符合导线的测量数据和简图,A、B、 C 和 D 是已知坐标点,2、3 和 4 是待测的控制点。
导线图如下:
导线图
在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入
在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D 为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4 点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。
根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式如下图“选择格式”所示:
选择格式
在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表
B、D 作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。
以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A 的观测信息”所示:
A 的观测信息
以C 为测站点,以4 号点为定向点时,照准D 点的数据输入如下图“测站C 的观测信息”所示:
C
2
2
以3 号点为测站点,以2 号点为定向点时,照准4 号点的数据输入如下图“测站3 的观测信息”所示:
3
以4 号点为测站点,以3 号点为定向点时,照准C 点的数据输入如下图“测站4 的观测信息”所示:
测站 4 的观测信息
说明:①数据为空或前面已输入过时可以不输入(对向观测例外)
②在电子表格中输入数据时,所有零值可以省略不输。
以上数据输入完后,点击菜单“文件另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A ):
[STATION] (测站信息)
B,10,8345.870900,5216.602100
A,10,7396.252000,5530.009000
C, 10,4817.605000,9341.482000
D, 10,4467.524300,8404.762400
2,00
3,00
4,00
[OBSER] (观测信息)
A,B,,1000.0000
A,2,85.302110,1474.4440
C,4
C,D,244.183000,1000.0000
2,A
2,3,254.323220,1424.7170
3,2
3,4,131.043330,1749.3220
4,3
4,C,272.202020,1950.4120
上面[STATION] (测站点)是测站信息区中的数据,[OBSER] (照准点)是观测信息区中的数据。
水准实例
这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的
水准路线图(模拟)
图中h 为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:
水准数据输入
在测站信息区中输入A、B、2、3和4号测站点,其中A、B 为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4 点为待测高程点,其属性为00,其它信息为空。因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:
选择格式
1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据
测段A 点至2 号点的观测数据输入(观测边长为平距)如下图“A->2 观测数据” 所示:
->3 观测数据
测段4 号点至B 点的观测数据输入如下图“ 4->B 观测数据”所示:
4->B 观测数据
以上数据输入完后,点击菜单“文件另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A ):
[STATION]
A,01,,,96.062000
B,01,,,88.183000
2,00
3,00
4,00
测量平差复习题及答案
测量平差复习题及答案 一、综合题 1.已知两段距离的长度及中误差分别为cm m 5.4465.300±及cm m 5.4894.660±,试说明这两段距离的真误差是否相等?他们的精度是否相等? 答:它们的真误差不一定相等;相对精度不相等,后者高于前者。 2.已知观测值向量 ???? ??=2121 L L L 的权阵为? ??? ????=32313132 LL P ,现有函数21L L X +=, 13L Y =,求观测值的权 1 L P , 2 L P ,观测值的协因数阵XY Q 。 答:12/3L P =;22/3L P =;3XY Q = 3.在下图所示三角网中,A .B 为已知点,41~P P 为待定点,已知32P P 边的边长和方位角 分别为 S 和 0α, 今测得角度1421,,,L L L 和边长21,S S ,若按条件平差法对该网进行平差: (1)共有多少个条件方程?各类条件方程各有多少个? (2)试列出除图形条件和方位角条件外的其它条件方程(非线性条件方程不要求线性化) 答:(1)14216,6,10n t r =+=== ,所以图形条件:4个;极条件:2个;边长条件:2个;基线条件:1个;方位角条件:1个 (2)四边形14ABPP 的极条件(以1P 为极) : 34131 241314????sin()sin sin 1????sin sin sin() L L L L L L L L +??=+ 四边形1234PP P P 的极条件(以4P 为极) : 101168 91167????sin()sin sin 1????sin sin sin() L L L L L L L L +??=+
铁三院CPIII测站平差软件用户手册
客运专线CPIII一体化测量系统铁三院CPIII测站平差软件 (V2.5 版) 铁道第三勘测设计院集团有限公司 The Third Railway Survey And Design Institute Group Corporation
目录 一、软件的安装 (1) 二、程序的主界面 (1) 三、程序的菜单 (1) 1、文件菜单 (1) 打开数据 (2) 参数设置 (3) 2、计算菜单 (6) 3、报表输出 (6) 输出目录位置 (6) 输出观测手薄 (7) 输出测站平差报告 (8) 输出《TSDI_HRSADJ》计算数据 (9) 输出清华山维导线数据 (10) 输出清华山维网数据 (12) 分组观测数据平差合并 (13)
一、软件的安装 操作系统:Windows 2K/XP/2003 支持软件:office2003、AutoCAD2004及以下版本。 该程序是绿色不需要安装的程序,只要将程序拷贝到硬盘就可以运行。 二、程序的主界面 三、程序的菜单 1、文件菜单
打开数据 用户打开数据的方法有两种,一个是直接双击tpt文件(像打开word文件一样),另一个是使用程序菜单里的打开数据功能。 当用户需要批量处理测站文件时,可以一次打开多个文件进行处理,当用户需要输出清华山维格式的导线数据(msm)文件时,尽量将整个计算段落的数据一次都选全。 当用户打开数据后,程序立即对tpt文件进行格式和数据进行容错检查,防止系统出现异常,当打开的tpt文件中存在错误时,程序将立即用记事本程序打开出错的文件,并提示错误类型,只有通过了程序错误检查的文件才能进行下一步的计算和输出。 注意:用户在第一次使用该程序或需要修改参数时,应先进行参数设置然后再打开数据。 注意:外业文件tpt尽量是一个测站一个文件。
VB测量平差程序设计讲稿
Case 0 '读入观测值文件 Text1.Visible = False CommonDialog1.ShowOpen fname = CommonDialog1.FileName '将用户在"打开"对话框中选择的文件名对变量fname赋值 If fname <> "" Then '若无此判断当对话框中选择取消时、下面赋值语句将出错 Set ts = fso.OpenTextFile(fname) '将fname作为文本文件打开,并设置句柄 j = 0: k = 0: p = 0: h = 0 'j是测站数累计变量,k是已知点累计变量,l(j)、ns(j)分别是方向值、边长累积计数 Do While ts.AtEndOfLine <> True '前测型循环,进入循环的条件是没有读到文件结束尾 B = ts.ReadLine '读一行,置入b B = Trim(B): i = 1: '删除B可能有的前导和尾随空格,i是工作变量, m(i) = InStr(B, ",") '查行中第一个逗号的左数位置,并保存在整形数组变量m(i) Do While m(i) <> 0 '前测型Do... Loop循环,成立条件是该行字符串中有逗号 tr(i) = Mid(B, m(i - 1) + 1, m(i) - m(i - 1) - 1) '提取指定位置开始的指定数目字符。 i = i + 1 m(i) = InStr(m(i - 1) + 1, B, ",") '从上一个找到的逗号位置起,查找下一个逗号的位置 Loop If m(i) = 0 And i > 1 Then tr(i) = Right(B, Len(B) - m(i - 1)) '处理一行中最后一个逗号后的字符串 '以下部分是将存储在数组变量m(i)中的字符分类存放到方向、边长、已知坐标、网型信息等数组中 If p = 0 Then '读到的是文件第一行。 ma = tr(1): ms = tr(2): mk = tr(3): p = 1 '提取观测方向,边先验精度值,并使该句以后不能再执行。 Else If m(1) = 0 Then j = j + 1: ReDim Preserve dm(j): ReDim Preserve nl(j): ReDim Preserve ns(j): dm(j) = B: nl(j) = nl(j - 1): ns(j) = ns(j - 1) '该行中没有逗号,但又不是结束符,则一定是测站点名。将读出的字符串赋值到点名数组变量dm(j), 资料.
误差理论与测量平差基础期末复习试题含答案
误差理论与测量平差基础期末复习试题含答案误差理论与测量平差基础(B) 一、填空题(每空1分,共30分) 1. 测量平差就是在基础上,依据原则,对观测值进行合理的调整,即分别给以适当 的,使矛盾消除,从而得到一组最可靠的结果,并进行。 2. 测量误差的定义为,按其性质可分为、和。 3. 衡量估计量优劣的标准有、、。 9km,5mm4. 在A、B两点间进行水准测量,路线长度为,每千米单程观测高差的中误差等于,则A、 B两点间单程观测高差的中误差等于,往返高差中数的中误差等于,往返高差不符 值的限差为。 5. 设为独立等精度偶然误差,为每个误差的均方差,则误差和的限差 为,(i,1,2,?,n),,,,i 。(取2倍中误差为限差) [,], 6. 若有一组观测值的函数、,设,则二L,?,Lx,aL,?,aLx,bL,?,bLQ,I1n111nn211nnL 者的相关系数= ,若再设,则行列式= 。 Q,b,2a(i,1,?,n)xxXii12 x3,1,,,,17. 设,,,,,则, X,,,,2Σ,z,x,x,,z,x0Xz21212,,,,1x,122,,,, ,, ,。 ,,zzz122 T8. = 。tr[E(ΔPΔ)]1,nn,nn,1 11SS9. 设观测值为,观测值的函数为,欲使的权倒数为,则的权倒数, 。 f,lgSfppfS
,,??v,sinx,2cosx,L10. 设非线性误差方程,参数近似值,观测值,x,60, x,45L,2512510205 线性化之后的误差方程为。 11. 平差的数学模型可分为模型和模型,前者描述观测值之间、观测值与参数之间以及 参数之间数学期望的关系,后者描述的则是观测值的精度特性。 ?,V,AδX,l,n,tn,1n,1t,1T12. 由二次型的数学期望= 可以证明,具有条件的参数平差模型中,E(XAX),?BδXW0,,X,t,1r,1r,t, T= 。 E(VPV) ,,15cm9cm4513. 已知某点的点位中误差等于,点位误差椭圆的短半轴为,短轴的方向角为,则误差 椭圆的长半轴等于,长轴的方向角等于。 A14. 参数平差中,若系数阵列降秩,则参数解有。 二、判断题(每题1分,共10分) 1. 通过测量平差,可以消除观测值的误差。( ) 2. 权矩阵的主对角线元素即为相应元素的权。( ) 3. 任何测量结果必然含有误差。( ) QP4. 条件平差中,为幂等阵。( ) V 5. 参数平差定权时,随单位权中误差的选取不同,会导致观测值的残差解不同。( ) TTVPV,ΔPΔ6. 条件平差中,一定有。( ) 7. 参数平差中,未知参数近似值可以任意选取,不影响平差结果。( ) ?BV,W,0W,,BlV,AδX,l8. 若参数平差模型为,条件平差模型为,则。( ) ,1,1,1,1,19. 若式、有意义,则二者总相等。( ) CB(D,ACB)(C,BDA)BD
测量平差编程
误差理论与测量平差上机指导书 辽宁工程技术大学 测绘与地理科学学院测绘工程系
目录 Visual C++ 6.0开发平台简介 (1) MFC概述 (1) 实验1 矩阵加法与乘法运算 (3) 实验2 矩阵转置与求逆运算 (6) 实验3 误差椭圆元素计算 (13) 实验4 水准网间接平差程序设计 (15)
Visual C++ 6.0开发平台简介 Visual C++提供了一个支持可视化编程的集成开发环境:Visual Studio(又名Developer Studio)。Developer Studio是一个通用的应用程序集成开发环境,它不仅支持Visual C++,还支持Visual Basic,Visual J++,Visual InterDev等Microsoft系列开发工具。Developer Studio包含了一个文本编辑器、资源编辑器、工程编译工具、一个增量连接器、源代码浏览器、集成调试工具,以及一套联机文档。使用Developer Studio,可以完成创建、调试、修改应用程序等的各种操作。 Developer Studio采用标准的多窗口Windows用户界面,并增加了一些新特性,使得开发环境更易于使用,用户很容易学会它的使用方法。 由于Developer Studio是一个可视化的开发工具,在介绍Developer Studio 的各个组成部分之前,首先了解一下可视化编程的概念。可视化技术是当前发展迅速并引人注目的技术之一,它的特点是把原来抽象的数字、表格、功能逻辑等用直观的图形、图象的形式表现出来。可视化编程是它的重要应用之一。所谓可视化编程,就是指:在软件开发过程中,用直观的具有一定含义的图标按钮、图形化的对象取代原来手工的抽象的编辑、运行、浏览操作,软件开发过程表现为鼠标点击按钮和拖放图形化的对象以及指定对象的属性、行为的过程。这种可视化的编程方法易学易用,而且大大提高了工作效率。 Visual C++的集成开发环境Developer Studio提供了大量的实用工具以支持可视化编程特性,它们包括:项目工作区、ClassWizard、AppWizard、WizardBar、Component Gallery等。 MFC概述 MFC是一个编程框架。MFC (Microsoft Foundation Class Library) 中的各种类结合起来构成了一个应用程序框架,它的目的就是让程序员在此基础上来建立Windows下的应用程序,这是一种相对SDK来说更为简单的方法。
最新工程测量案例分析资料
工程测量案例 ●隧道控制测量案例 ●大比例尺地形图测量案例 ●变形监测案例 ●施工测量案例 ●市政工程测量案例 一、隧道控制测量案例 背景材料 在某新建铁路线上,已有首级控制网数据。有一隧道长10Km,平均海拔500m,进出洞口以桥梁和另外两标段的隧道相连。为保证双向施工,需要按GPS C级布设平面控制网和进行二等水准测量。 仪器设备:单、双频 GPS 各6台套、S3光学水准仪5台、数字水准仪 2台(0.3mm/Km)、2 秒级全站仪 3台。 计算软件:GPS 数据处理软件、水准测量平差软件。 分析要点: 建立隧道控制网的主要作用是保证隧道的正确贯通。隧道控制包括地面和洞内两部分。 原有地面控制点精度、点位不满足贯通要求时,建立隧道独立控制网。如点位不满足,则进行加密。平面控制网按GPS C级布设,每个洞口3个点,进洞点和方位点间要通视,如边长小于500 m 应设强制对中观测墩。高程为二等水准,每个洞口 2个点。 GPS控制网采用6台双频GPS观测,二等水准采用 2台数字水准仪分两组观测。 考试样题 单项选择题: 1.长度大于4Km的隧道地面平面控制测量优先采用( C )。 A.导线测量 B.三角形网测量 C.GPS测量 2.二等水准测量往返测高差不符值为( A )。 A.4√K B.6√K C.8√K 简答题: 1.在控制测量观测之前,需要做哪些准备工作? 资料收集、现场踏勘、选点埋石、方案设计。 2.为满足工程需要,应选用哪些仪器进行测量?
采用6台双频GPS接收机和2台数字水准仪。 3.最终提交的成果应包括哪些内容? (1)技术设计书 (2)仪器检验校正资料 (3)控制网图、点之记 (4)控制测量外业观测资料 (5)控制测量计算及成果资料 (6)所有测量成果及图件电子文件 二、大比例尺地形图测量案例 背景材料: 某水库规划为城市供水,需进行水库地区地形测量。测区面积15Km2,为丘陵地区,海拔高50~120m。山上灌木丛生,通视较差。需遵照《城市测量规范》1︰1000地形图,工期 60 天。 已有资料:国家二等三角点 1 个、D 级GPS点 1 个,国家一等水准点 2 个。作为平面和高程控制起算点。 坐标和高程系统、基本等高距、图幅分幅:采用54北京坐标系和1956年黄海高程系。基本等高距1.0m。50×50矩形分幅。 提交成果资料: (1)技术设计书 (2)仪器检验校正资料 (3)控制网图 (4)控制测量外业观测资料 (5)控制测量计算及成果资料 (6)地形图 (7)所有测量成果及图件电子文件 分析要点: 地形图基本内容: 数学要素包括比例尺、坐标格网、控制点坐标等。地形要素包括各种地物(以比例符号、非比例符号、半比例符号表示)、地貌(以等高线表示)。图内注记要素和图廓整饰要素。 碎部测量: 碎部测量是以控制点为基础,测定地物、地貌的平面位置和高程,并绘制成地形图。大比例尺地形图测量案例
误差理论与测量平差基础期末考试试卷样题
误差理论与测量平差基础期末考试试卷样题 一、填空题(15分) 1、误差的来源主要分为、、。 2、中误差是衡量精度的主要指标之一,中误差越,精度越。极限误差是指。 3、在平坦地区相同观测条件下测得两段观测高差及水准路线的长分别为: h 1=10.125米,s 1 =3.8公里,h 2 =-8.375米,s 2 =4.5公里,那么h 1 的精度比h 2 的精 度______,h 2的权比h 1 的权______。 4、间接平差中误差方程的个数等于________________,所选参数的个数等于 _______________。 5、在条件平差中,条件方程的个数等于。 6、平面控制网按间接平差法平差时通常选择________________为未知参数,高程控制网按间接平差法平差时通常选择________________为未知参数。 7、点位方差与坐标系,总是等于。
二、 水准测量中若要求每公里观测高差中误差不超过10mm ,水准路线全长高差 中误差不超过20mm,则该水准路线长度不应超过多少公里?(5分) 三、已知观测向量()L L L T =1 2的协方差阵为D L =--?? ?? ?3112,若有观测值函数 Y 1=2L 1,Y 2=L 1+L 2,则σy y 12等于?(5分)
四、观测向量L L L T =()1 2的权阵为P L =--()31 14 ,若有函数X L L =+12, 则函数X 与观测向量L 的互协因数阵Q XL 等于什么? (5分) 五、对某长度进行同精度独立观测,已知一次观测中误差为2mm ,设4次观测值平均值的权为2。试求:(1)单位权中误差0σ;(2)一次观测值的权;(3)若使平均值的权等于8,应观测多少次? (9分)
附合导线平差程序设计报告
《测量平差程序》课程设计 (报告) 学生姓名:罗正材 学号:1108030128 专业:2011级测绘工程 指导教师:肖东升
目录 一、前言 (3) 二、平差程序的基本要求 (3) 三、平差程序模块化 (3)
图1 四、平差中的重要函数 (一)、角度制与弧度制的相互转化 C/C++程序设计中,关于角度的计算以弧度制为单位,而在测量以及具体工作中我们通常习惯以角度制为单位。这样,在数据处理中,经常需要在角度制与弧度制之间进行相互转化。这里,我们利用C/C++数学函数库math.h中的相关函数完成这两种功能。 这里,我们使用double类型数据表示角度制数和弧度制数。例如:123度44分58.445秒,用double类型表示为123.4458445,其中分、秒根据小数位确定。 在角度制与弧度制的转化中,涉及如下图2所示的两个环节。 度.分秒度弧度 图2 1.角度化弧度函数 double d_h(double angle) //角度化弧度 { double a,b; angle=modf(angle,&a);//a为提取的度值(int类型),angle为分秒值(小数) angle=modf(angle*100.0,&b); // b为提取的分值(int类型),angle为秒值(小数) return (a+b/60.0+angle/36.0)*(PI+3.0E-16)/180.0; } 2.弧度化角度函数 double h_d(double angle) //弧度化角度
{ double a,b,c; angle=modf(angle*180.0/(PI-3.0E-16),&a); angle=modf(angle*60.0,&b); angle=modf(angle*60.0,&c); return a+b*0.01+c*0.0001+angle*0.0001; } 其中,函数modf(angle,&a)为C语言数学库函数,返回值有两个,以引用类型定义的a 返回angle的整数部分,函数直接返回值为angle的小数部分。 (二)近似坐标计算 在平面网间接平差计算中,近似坐标计算是非常重要的一项基础工作。近似坐标是否计算成功是间接平差是否可以进行的必要条件。 1.两方向交会 已知条件:两个点的近似坐标,这两个点到未知点的方位角,如图3所示 图3两方向交会 根据图4.2,设 1 1 α tg k=, 2 2 α tg k=,则很容易写出 ? ? ? ? ? ? - = - - = B P B P A P A P y y k x x y y k 2 1 整理该式,得两方向交会的的计算公式 ?? ? ? ? ? - - = ?? ? ? ? ? ?? ? ? ? ? - - B B A A P P y x k y x k y x k k 2 1 2 1 1 1 (4.1)对(4.1)式计算,即可得到未知点的近似坐标。应用中需要注意的是,若两方向值相同或相反,则该式无解。 程序中,定义该问题的函数为:int xy0ang(obser &a1,obser &a2) 2.三边交会 如图4所示,为排除两边长交会的二义性,给出如下三边交会的模型,已知条件:三个
导线测量严密平差方法
全站仪观测导线测量平差方法的研究 邱健壮1,赵燕2,李宗才3 (1.山东农业大学水利土木工程学院,山东泰安 271018;2.龙口市土地管理局;3.临沂市岸 堤水库管理局) 摘要:针对全站仪观测导线能够即时直接得到待定点的近似坐标的特点,从而提出了便于实际应用的近似坐标平差和严密坐标平差方法。分析了其原理和优点,并给出了实际操作的公式。 关键词:导线;平差;方位角;间接平差 中图分类号: TU204 文献标识码:A 文章编号:1000-2324(2003)01-0096-04 RESEARCH OF TRAVERSE ADJUSTMENT METHOD USING GENERAL TOTAL STATION QIU Jian-zhuang,ZHAO Yan,LI Zong-cai (College of Water Conservancy and CivilEngineering,Shandong Agricultural University,Taian,271018,China) Abstract:On the basis of the characteristic that General Total Station can obtain immediately the approximate coordinates of point during observing traverse.This paper introduces the adjustment method of approximate and rigorous coordinates convenient to realistic application,and analysizes its theory and application advantages,and gives the formula convenient to realistic operation. Key words: traverse,adjustment,azimuth,adjustment by observation equations 1 问题的提出 随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。这将优于过去导线计算过程中先进行边、角平差后,再求取坐标的方法。本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。 2 导线的近似坐标平差 导线测量用于图根控制等低精度测量中,往往采用近似平差即可。由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。全站仪观测导线直接按坐标平差计算,将更为简便。直接按坐标平差法计算步骤如下:
精密工程测量平差软件使用手册范本
客运专线CPIII一体化测量系统 精密工程测量平差软件 TSDI_HRSADJ (V5.0 版) 铁道第三勘测集团 The Third Railway Survey And Design Institute Group Corporation
目录 第一章软件安装 (1) 1.1 软件的运行环境 (1) 1.2 软件的安装 (1) 第二章软件操作 (4) 2.1数据文件格式定义 (4) 2.2 工程基本设置 (9) 2.3 读入数据 (11) 2.4 平差计算 (13) 2.5 成果输出与查看 (14) 2.6 网图显示 (18) 2.7 工具 (20) 第三章疑难解答 (23) 3.1 平面网平差计算步骤 (23) 3.2 平面网平差迭代计算 (24) 3.3 如何快速检查数据的错误 (25) 第四章附录 (26) 4.1 快捷键一览表 (26)
第一章软件安装 1.1 软件的运行环境 硬件环境: 1. 奔腾Ⅲ以上CPU; 2. 64M 以上存; 3. 硬盘空间 500M以上; 4. 鼠标、键盘、显卡、显示器、USB接口等必要硬件。 软件环境: 1. 操作系统Windows 2000、Windows XP及其以上; 2.配合软件Office 2003 (Office XP)、AUTOCAD; 3. 软件使用者应具备本地管理员权限。 1.2 软件的安装 点击 TSDI_HRSADJ5.0.EXE 安装程序将自动运行(如图1.2.1),用户请按照提示退出其他所有正在运行的程序,特别是一些杀毒软件、实时监控软件。然后,安装程序将进入许可协议界面(如图1.2.2)。请用户仔细阅读许可协议,若您不是铁道第三勘察集团和同济大学测量与国土信息工程系的授权用户,请退出安装;若强行继续,由于您没有安装密码和USB加密狗也将最终导致安装失败。 图1.2.1 欢迎界面
闭合导线平差计算步骤
闭合导线平差计算步骤: 1、绘制计算草图。在图上填写已知数据和观测数据。 2、角度闭合差的计算与调整 (1)计算闭合差: (2)计算限差:(图根级) (3)若在限差内,则按平均分配原则,计算改正数: (4)计算改正后新的角值: 3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差的计算与调整 (1)计算坐标增量闭合差。有: 导线全长闭合差: 导线全长相对闭合差: (2)分配坐标增量闭合差 若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。并计算改正后的坐标增量。
6、坐标计算 根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。 [ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。 计算表格见下图:
闭合水准路线内业计算的步骤: (1) 填写观测数据 (2) 计算高差闭合差 h f =∑h ,若h f ≤容h f 时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。 (3) 调整高差闭合差 各段高差改正数: i h i i h i L L f V n n f V ·· ∑-= ∑-= 或 各段改正高差: i i i V h h +=改 (4) 计算待定点的高程 闭合差(fh ) 水准路线中各点间高差的代数和应等于两已知水准点间的高差。若不等两者之差称为闭合差 高差闭合差的计算 .支水准路线闭合差的计算方法 .附合水准路线闭合差的计算方法 .闭合水准路线闭合差的计算方法 高差闭合差容许值 (n 为测站数,适合山地) (L 为测段长度,以公里为单位,适合平地) 水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差
《误差理论与测量平差基础》试卷A(答案)
《误差理论与测量平差基础》期末考试试题A(参考答案) 一、名词解释(每题2分,共10分) 1、偶然误差 ——在相同的观测条件系作一系列的观测,如果误差在大小和符号上都表现出偶然性。即从单个误差看,该误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律。这种误差称为偶然误差。 2、函数模型线性化 ——在各种平差模型中,所列出的条件方程或观测方程,有的是线性形式,有的是非线性形式。在进行平差计算时,必须首先把非线性形式的函数方程按台劳公式展开,取至一次项,转换成线性方程。这一转换过程,称之为函数模型的线性化。 3、点位误差椭圆 ——以点位差的极大值方向为横轴X 轴方向,以位差的极值F E 、分别为椭圆的长、短半轴,这样形成的一条椭圆曲线,即为点位误差椭圆。 4、协方差传播律 ——用来阐述观测值的函数的中误差与观测值的中误差之间的运算规律的数学公式。如 0K KL Z +=,若观测向量的协方差阵为LL D ,则按协方差传播律,应有T LL ZZ K KD D =。 5、权 ——表示各观测值方差之间比例关系的数字特征,220 i i P σσ=。 二、判断正误(只判断)(每题1分,共10分) 参考答案:X √X √X X X √√X 三、选择题(每题3分,共15分) 参考答案:CCDCC 四.填空题(每空3分,共15分) 参考答案:1. 6个 2. 13个 3.1/n 4. 0.4 5. 0) () () () (432 00 2 0=''+?+?+-''+ -''- W y S X X x S Y Y C AC A C C AC A C ρρ,其中 AB A C A C X X Y Y W αββ-++--=''4300arctan 五、问答题(每题4分,共12分) 1. 几何模型的必要元素与什么有关?必要元素数就是必要观测数吗?为什么? 答:⑴几何模型的必要元素与决定该模型的内在几何规律有关;(1分) ⑵必要元素数就是必要观测数;(1分) ⑶几何模型的内在规律决定了要确定该模型,所必须具备的几何要素,称为必要元素,必要元素的个数,称为必要元素数。实际工程中为了确定该几何模型,所必须观测的要素个数,称为必要观测数,
导线测量平差常见问答
导线测量平差常见问答 一、为何有时计算结果与其它计算有些差异? 答:a.观测角度使用的是前进方向的左角还是右角,本软件采用前进方向的左角,输入负号时表示是前进方向的右角,并转换为左角平差。 b.是否选用了概算,及概算的各选项是否正确。 c.是否使用严密平差,严密平差与近似平差计算结果是不同的。 d.严密平差是否使用迭代平差,有些软件尽管使用严密平差,但只进行单次平差,精度不高。 e.严密平差的先验误差设置是否一致,是否使用了Helmert验后方差定权,软件使用的定权方式可能不一样,导致部分差异。 f.近似平差是否选用了反算等,可以在“项目设置”中更改以适合您的需要。 g.近似平差时是否选用了角度改正前的坐标增量闭合差,这会导致坐标增量闭合差的不一致。 h.高程平差时,水准和三角高程因为定权的不同而有差异,坐标导线按三角高程计算,其它则提供了高差类型的选择。 二、如何选择严密平差或近似平差?近似平差是否需要进行方位角边长反算? 答: 《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各等级导线,而近似平差适用于较低等级导线,采用近似平差时应对方位角、角度、边长等进行反算,以便方位角、边长、角度等可以作为最终成果使用。 三、为什么软件中默认的计算表格样式与我们的习惯不一样? 答:成果表格可以自定义,计算表因方案设置的不同而有所不同。 这里主要是因为您使用的是近似平差且不进行反算的格式,而本软件默认是严密平差,当选择近似平差时默认也是进行反算的。可以在项目设置中选择近似平差,并且去掉“方位角、边长反算”等即可获得您所需的格式。 四、近似平差时的坐标增量闭合差为什么与有些书上不一样? 答:近似平差中,计算方案里有一个选项,以让用户选择近似平差是否使用在角度闭合差分配前计算的坐标增量闭合差来反映导线精度。使用角度闭合差分配前计算的坐标增量闭合差将与严密平差一致,否则与通常的手工计算一致。 五、验后测角中误差有时相对于角度闭合差为何显得很大? 答:这主要有以下情况: a.先验误差设置不切实际,相对于测角,将测距先验误差设置过高会导致程序认为误差主要来源于角度,而对角度加以较大的改正数,使得评定的测角中误差较大。 b.测量发生错误,主要可能是边长测量错误,使得坐标增量闭合差太大。 c.已知点精度不高。 六、为什么角度闭合差不是平均分配的? 答:严密平差是按最小二乘法平差,角度闭合差不是平均分配的。 近似平差角度闭合差是平均分配的,但如果计算方案里选择了进行反算,则角度、方位角、边长等都是反算后的最终成果,并不是计算的中间成果,角度改正数也就可能有正有负。
办公软件论如何运用EXCEL软件进行测量计算和绘图数据处理
办公软件论文: 如何运用EXCEL软件进行测量计算和绘图数据处理 摘要: 介绍了如何运用办公软件EXCEL进行测量计算和绘图数据处理的一些方法和思路,并提供一些常用到的计算公式。 关键词: EXCEL软件;测量计算;绘图;数据处理;处理方法工程设计工作中,测量计算和绘图数据处理会经常用到,我们所使用的测量平差计算软件种类繁多,但无论哪一种平差软件都有其本身的缺陷,对测量计算或是绘图数据处理,都存在无法满足需要的一面。即便某平差软件的功能非常齐全,但此类软件一般是针对大型控制网平差计算开发出来的,对一些如测图水准、图根导线的简单计算来说,则显得非常烦琐。本文通过运用办公软件EXCEL在测量计算和绘图数据处理上的一些方法和技巧,为应用EXCEL提供了一些方法和思路,同时也有运用到了一些常用到的计算公式。 1运用EXCEL软件进行测量计算基本方法 打开EXCEL后会显示出一X空表格,可以把所要处理的原始数据依次输入到相应的单元格中。当原始数据输入完毕后,再在需要显示结果的相应单元格内输入计算公式,EXCEL 则会按照公式自动计算出结果。下面以利用两点坐标计算距离为例,说明一下计算方法。 第一步,按照计算流程设计一个表格并把表头、边号、
坐标输入到相应的格内,如图1所示,坐标差dx、dy、边长S为待计算的值。第二步,在需要显示结果的格内输入计算公式,由于dx=x1-x2,在本表中第一条边的x1、x2所在单元格分别为B3和D3(B3代表第B列的第3行),所以要计算第一条边的dx,则在第一条边所对应的dx下面F3单元格内,输入公式“=B3-E3”并向下充填,利用SQRT()开方和平方函数,在S格下面输入公式“=SQRT(F3^2+G3^2”)并向下充填,则所有计算完成。虽然表中每一格都有自己的编号,如B3、F3,但在办理入公式的过程中可不用键入其编号,可以用鼠标点击办理入,如要输入公式:=B3-D3,则依次操作:=、点击B3格、+、点击D3、回车。通过用鼠标点击、向下充填,可轻轻松松地完成计算工作。详见图1。 在较复杂的运算中,会经常用到逻辑函数,在EXCEL中,备有常用的如AND()、NOT()、OR()、IF()等函数。可制成坐标反算方位角的逻辑图,从而方便了使用。 IF()函数完成其逻辑判断: IF(Dx<0,A=180-T,IF(AND(Dx>=0,Dy<0),360+T,T)),式中,Dx、Dy、T为变量,在EXCEL为单元格编码。
平差易软件数据输入实例
导线实例 这是一条符合导线的测量数据和简图,A、B、 C 和 D 是已知坐标点,2、3 和 4 是待测的控制点。 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D 为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4 点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D 作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A 的观测信息”所示: A 的观测信息 以C 为测站点,以4 号点为定向点时,照准D 点的数据输入如下图“测站C 的观测信息”所示: C 2 2 以3 号点为测站点,以2 号点为定向点时,照准4 号点的数据输入如下图“测站3 的观测信息”所示: 3 以4 号点为测站点,以3 号点为定向点时,照准C 点的数据输入如下图“测站4 的观测信息”所示:
测站 4 的观测信息 说明:①数据为空或前面已输入过时可以不输入(对向观测例外) ②在电子表格中输入数据时,所有零值可以省略不输。 以上数据输入完后,点击菜单“文件另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A ): [STATION] (测站信息) B,10,8345.870900,5216.602100 A,10,7396.252000,5530.009000 C, 10,4817.605000,9341.482000 D, 10,4467.524300,8404.762400 2,00 3,00 4,00 [OBSER] (观测信息) A,B,,1000.0000 A,2,85.302110,1474.4440 C,4 C,D,244.183000,1000.0000 2,A 2,3,254.323220,1424.7170 3,2 3,4,131.043330,1749.3220 4,3 4,C,272.202020,1950.4120 上面[STATION] (测站点)是测站信息区中的数据,[OBSER] (照准点)是观测信息区中的数据。 水准实例 这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的
导线测量平差教程
计算方案的设置 一、导线类型: 1.闭、附合导线(图1) 2.无定向导线(图2) 3.支导线(图3) 4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。而且该类型不需要填写未知点数目。当点击表格最后一行时自动添加一行,计算时删除后面的空行。 5.坐标导线。指使用全站仪直接观测坐标、高程的闭、附合导线。 6.单面单程水准测量记录计算。指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。当输入了“中视”时可以用作中平测量等的记录计算。 说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。 二、概算 1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。 2.应选择相应的坐标系统,以及Y坐标是否包含500KM。选择了概算时,Y坐标不应包含带号。
三、等级与限差 1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。如果填写的值不符合您所使用的规范,则再修改各项值的设置。比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。 2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。 四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算 1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。 2.严密平差:按最小二乘法原理平差。 3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各种等级的控制网,而近似平差适用于较低等级。当采用近似平差时,应进行方位角、边长反算。 显示角度改正前的坐标闭合差:勾选此项后,程序在“平面计算表”备注栏内显示角度改正前的坐标闭合差,否则显示角度改正后的坐标增量闭合差。为了以示区别,角度改正前的坐标闭合差以Wx、Wy、Ws表示,角度改正后的坐标增量闭合差以fx、fy、fs表示。 五、近似平差设置 1.方位角、边长反算:根据近似平差后的坐标反算方位角、边长、角度等。反算后的方位角、边长、角度等是平差后的最终值,可以作为最终成果使用,否则仅为平差计算的中间结果,不应作为最终成果使用。反算与不反算表格形式是不一样的。注意:反算后,按最终的角度值
测量平差编程实习心得体会
测量平差编程实习心得体会导语:熟练掌握一门或多门编程语言,会让我们处理专业问题时更加得心应手。以下小编为大家介绍测量平差编程实习心得体会文章,仅供参考! 测量平差编程实习心得体会测量是一项务实求真的工作,半点马虎都不行,在测量实习中必须保持数据的原始性,这也是很重要的。为了确保计算的正确性和有效性,必须得反复核对各个测点的数据是否正确。我在测量中不可避免的犯下一些错误,比如读数不够准确,气泡没居中等等,都会引起一些误差。 因此,我在测量中内业计算和测量同时进行,这样就可以及时发现错误,及时纠正,同时也避免了很多不必要的麻烦,节省了时间,也提高了工作效率。测量也是一项精确的工作,通过测量学的学习和实习,在我的脑海中形成了一个基本的测量学的轮廓。测量学内容主要包括测定和测设两个部分,要完成的任务在宏观上是进行精密控制,从微观方面讲,测量学的任务为工程测量实习心得测量是一项务实求真的工作,半点马虎都不行,在测量实习中必须保持数据的原始性,这也是很重要的。为了确保计算的正确性和有效性,必须得反复核对各个测点的数据是否正确。我在测量中
不可避免的犯下一些错误,比如读数不够准确,气泡没居中等等,都会引起一些误差。因此,我在测量中内业计算和测量同时进行,这样就可以及时发现错误,及时纠正,同时也避免了很多不必要的麻烦,节省了时间,也提高了工作效率。 测量也是一项精确的工作,通过测量学的学习和实习,在我的脑海中形成了一个基本的测量学的轮廓。测量学内容主要包括测定和测设两个部分,要完成的任务在宏观上是进行精密控制,从微观方面讲,测量学的任务为按照要求测绘各种比例尺地形图;为各个领域提供定位和定向服务,建立工程控制网,辅助设备安装,检测建筑物变形的任务以及工程竣工服务等。而这一任务是所有测量学的三个基本元素的测量实现的:角度测量、距离测量、高程测量。在这次实习中,我学到了测量的实际能力,更有面对困难的忍耐力。首先,是熟悉了水准仪、光学经纬仪、全站仪的用途,熟练了水准仪、全站仪的使用方法,掌握了仪器的检验和校正的方法;其次,在对数据的检查和校正的过程中,明白了各种测量误差的来源,其主要有三方面: 1、仪器误差、外界影响误差(如温度、大气折射等)、观测误差。了解如何避免测量结果误差,最大限度的就是减少误差的出现,即要做到在仪器选择上要选择精度较高的合适仪器。
平差过程操作
平差过程操作 打开数据文件 点击菜单“文件\打开”,在下图“打开文件”对话框中找到三角高程导线.txt。 打开文件 近似坐标推算 根据已知条件(测站点信息和观测信息)推算出待测点的近似坐标,作为构成动态网图和导线平差作基础。 用鼠标点击菜单“平差\推算坐标”即可进行坐标的推算。如下图“坐标推算”所示: 坐标推算
推算坐标的结果如下: 注意:每次打开一个已有数据文件时,PA2005会自动推算各个待测点的近似坐标,并把近似坐标显示在测站信息区内。当数据输入或修改原始数据时则需要用此功能重新进行坐标推算。 选择概算 主要对观测数据进行一系列的改化,根据实际的需要来选择其概算的内容并进行坐标的概算。如下图“选择概算”所示: 选择概算 选择概算的项目有:归心改正、气象改正、方向改化、边长投影改正、边长高斯改化、边长加乘常数改正和Y含500公里。需要参入概算时就在项目前打“ ”即可。 归心改正 归心改正根据归心元素对控制网中的相应方向做归心计算。在平差易软件中只有在输入了测站偏心或照准偏心的偏心角和偏心距等信息时才能够进行此项改正。如没有进行偏心测量,则概算时就不进行此项改正。
此实例数据中没有输入偏心信息所以不用选择此概算项目。 气象改正 气象改正就是改正测量时温度、气压和湿度等因素对测距边的影响。 实际气象条件(外业控制测量时的气象条件) 每条边的温度和气压在测站的观测信息区中输入。 绝对湿度:控制测量时的当地湿度,单位为mmHg 。此项改正值非常小一般不参入改正。 测距仪波长:测距仪发射的电子波波长,单位为μm 。此实例数据中的电子波波长为0.91μm 参考气象条件(在此条件下测距仪所测的距离为真值,没有误差,也是标定的气象条件) 摄氏温度:测距仪的标定温度,单位为℃。此实例数据中的标定温度为15℃。 绝对湿度:测距仪的标定湿度,单位为mmHg 。此实例数据中的标定湿度为3332mmHg 。 大气压强:测距仪的标定气压。单位为百Pa 。此实例数据中的标定气压为1030Pa 。 注意:如果外业作业时已经对边长进行了气象改正或忽略气象条件对测距边的影响,那么就不用选择此项改正。如果选择了气象改正就必须输入每条观测边的温度和气压值,否则将每条边的温度和气压分别当作零来处理。 方向改化 方向改化:将椭球面上方向值归算到高斯平面上。 公式:&”1,2= 2 2Rm ” ρ.Ym. △X, 其中&”1,2为方向改正数; 2 2Rm ” ρ为由《高斯—克吕格投影计算用表》按两点间平均纬度Bm 查取; Ym =2Y1+Y2; △X =X2-X1; X,Y 均为推算的近似坐标。 Rm 地球曲率半径。 边长投影改正 边长投影改正的方法有两种:一种为已知测距边所在地区大地水准面对于参考椭球面的高度而对测距边进行投影改正;另一种为将测距边投影到城市平均高程面的高程上。 当在“测距边水平距离的高程归化”中选择“测距边所在地区大地水准面对于参考椭球面的高度”并输入高度值时,边长投影改正计算方法如下: