步进电机驱动之全桥驱动与斩波恒流
步进电机驱动之全桥驱动与斩波恒流
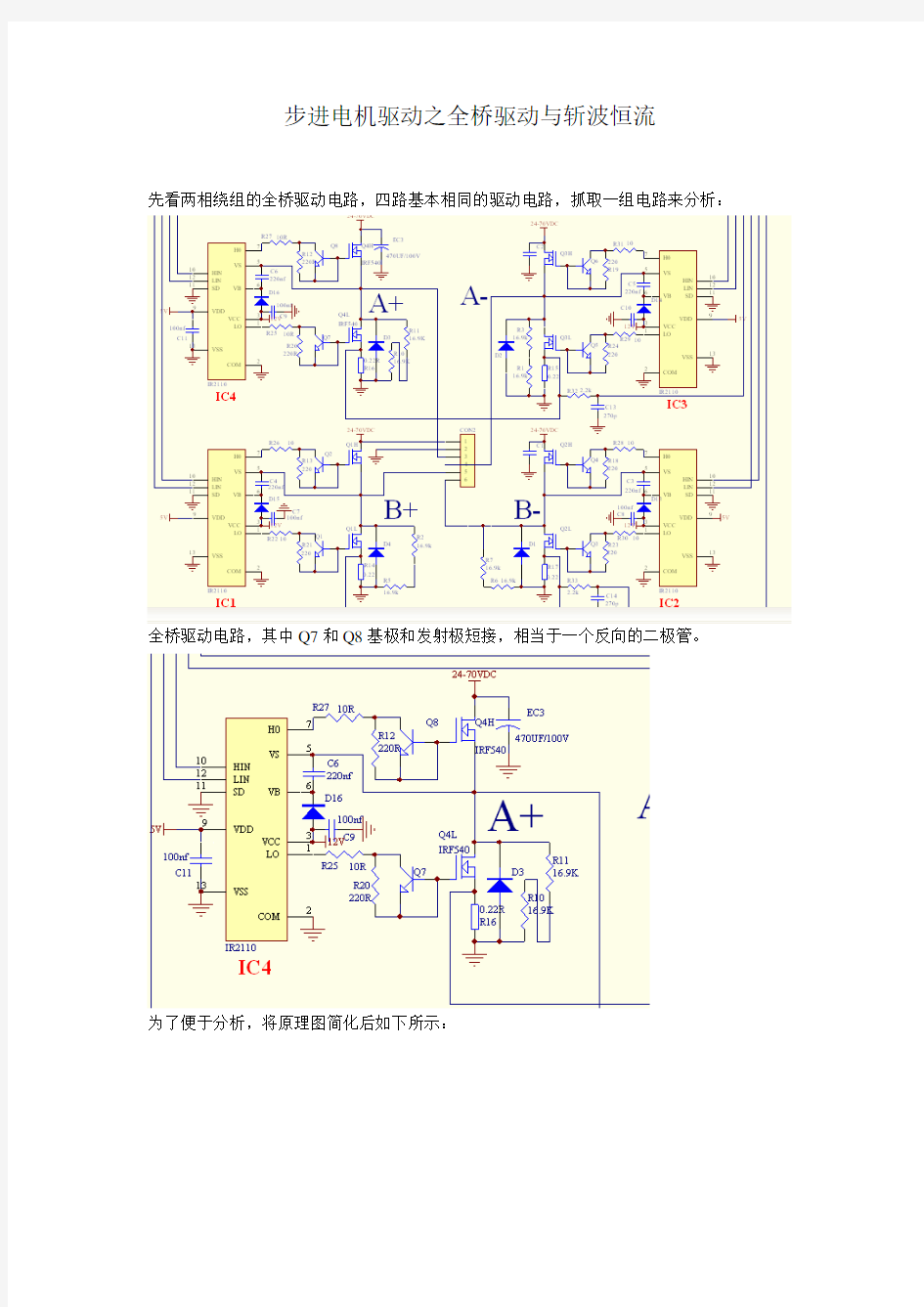
先看两相绕组的全桥驱动电路,四路基本相同的驱动电路,抓取一组电路来分析:
全桥驱动电路,其中Q7和Q8基极和发射极短接,相当于一个反向的二极管。
为了便于分析,将原理图简化后如下所示:
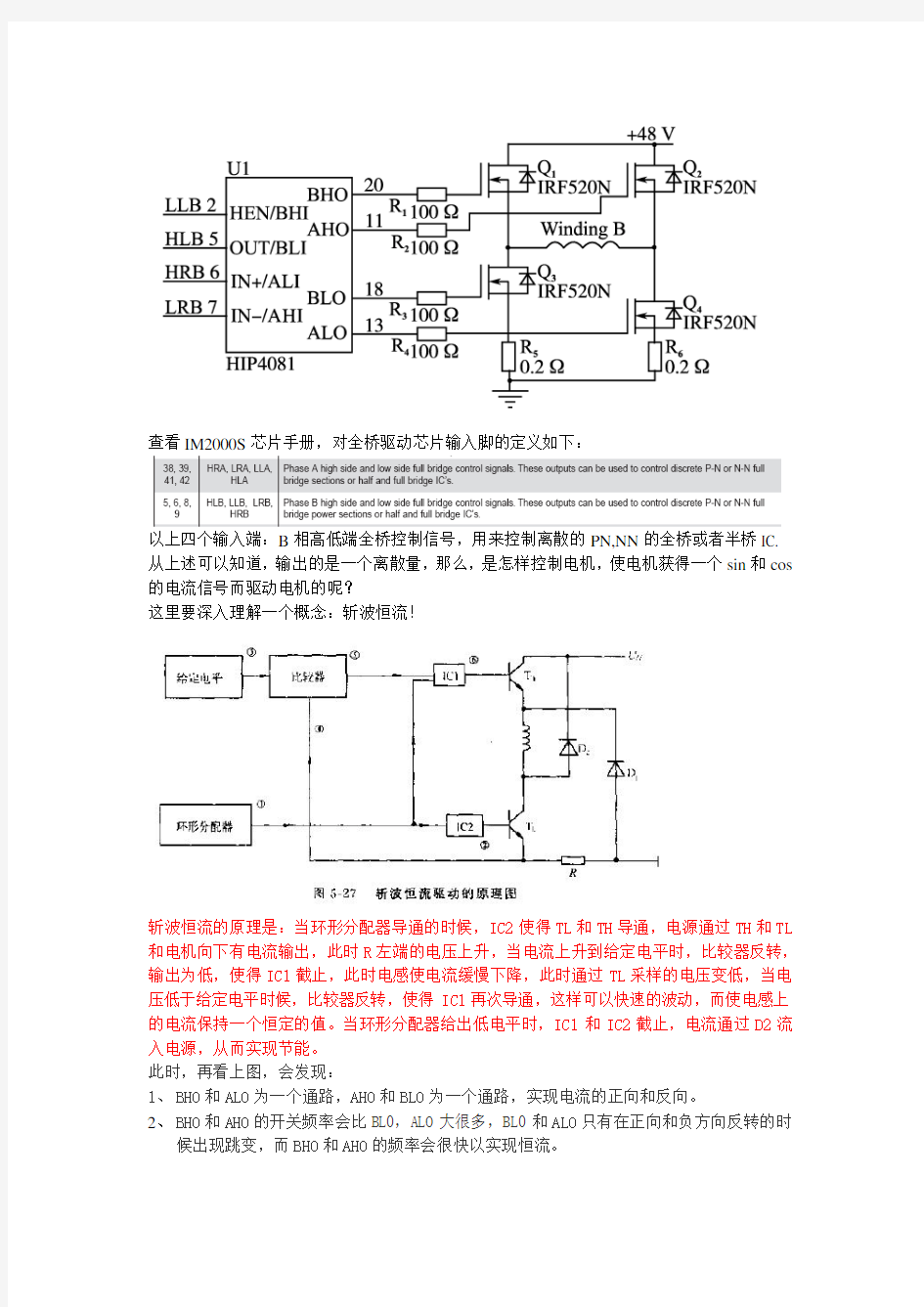
查看IM2000S芯片手册,对全桥驱动芯片输入脚的定义如下:
以上四个输入端:B相高低端全桥控制信号,用来控制离散的PN,NN的全桥或者半桥IC. 从上述可以知道,输出的是一个离散量,那么,是怎样控制电机,使电机获得一个sin和cos 的电流信号而驱动电机的呢?
这里要深入理解一个概念:斩波恒流!
斩波恒流的原理是:当环形分配器导通的时候,IC2使得TL和TH导通,电源通过TH和TL 和电机向下有电流输出,此时R左端的电压上升,当电流上升到给定电平时,比较器反转,输出为低,使得IC1截止,此时电感使电流缓慢下降,此时通过TL采样的电压变低,当电压低于给定电平时候,比较器反转,使得IC1再次导通,这样可以快速的波动,而使电感上的电流保持一个恒定的值。当环形分配器给出低电平时,IC1和IC2截止,电流通过D2流入电源,从而实现节能。
此时,再看上图,会发现:
1、BHO和ALO为一个通路,AHO和BLO为一个通路,实现电流的正向和反向。
2、BHO和AHO的开关频率会比BL0,ALO大很多,BL0和ALO只有在正向和负方向反转的时
候出现跳变,而BHO和AHO的频率会很快以实现恒流。
这里值得注意的一点是,上述过程仅仅是在一个细分时候,一个数模转换量上保持的恒流。如果整步为256细分,则在256细分的每一个细分阶段实际上过程就是上文红色字体运行一遍的一个过程,而要使整个电机转动一圈,则需要完成一个SIN和COS的整个过程,如果上面的过程仍然无法理解,请参看步进电机细分方面的内容。
从整个驱动电路的系统上看,
整个闭环是按照如下进行工作的:
1、TC1002发出一个启动信号,使得全桥驱动芯片导通A+的MOS1和A-的MOS2形成回
路,此时在A-上采集的电压通过比较器与正弦信号输出的给定参考电压形成对比,当电压超过参考电压时,比较器翻转,翻转信号反馈给TC1002,然后低电平的信号反馈给A+的MOS1,此时MOS关闭,电机上的电流通过A+的MOS1流回电源,从而完成周而复始的完成整步的1/N的一次恒流。
2、参考电压(图中OUTA和OUTB),为一个N细分的正弦和余弦电压波形图,当电压进入
下一个细分电压时,比较器将跟随输出电压,从而使得电机中流过的电流进入下一个电流梯度,进而实现整步的转动。
再看如下的小回路的作用:
也就是当比较器翻转的时候,为了保持电机更加平稳,需要电感上的电流迅速下降然后再经过比较器反馈,迅速导通MOS1,以实现电流的平稳,显然,此处的两个电阻和二极管是为了迅速的放电用的。
最简单的18W LED 恒流驱动
小于一元硬币非隔离高恒流精度18W LED日光灯驱动方案中国LED标准委员会李明峰李照详张义张占松杨威 摘要:文章详细介绍了基于TRUEC2技术非隔离BUCK拓扑,来实现18W极高精度日光灯LED恒流控制。试验证明,全闭环TRUEC2技术实时检测真实输出电流,免受输入电压、外部电感影响,突破性地提高了LED输出电流的精度。集成MOSFET,简化外围线路;控制方式免受电感影响。体积小可内置于日光灯灯头,是理想的非隔离恒流驱动方案。最后,对于LED驱动电源未来发展趋势及其担忧,笔者提出了自己的观点。 关键词:TRUEC2LED恒流控制全闭环电流控制DU8618 LED Constant Current Control Solution based on TRUEC2 Technology Abstract: This paper presents the principle of a non-isolated BUCK topology based on TRUEC2 constant current control, using integrated MOSFET PWM control IC: Duty Cycle Company’s DU8618. The experiment demonstrates that this control method can effectively increase the accuracy of the output current, which is not subject to the line voltage and external inductor. The Robustness is also increased compare with open loop control solution. The integration of MOFET results in the decreasing of external components, which in turn decreases total cost. A very cost-effective 18W Tube LED solution is detailed illuminated here. Keyword:TRUEC2/LED Constant Current Control / Close loop current control/ DU8618 1 引言 进入2013年,我们切身感受到了LED行业发展的阵阵暖意。目前有好几个趋势正在推动LED照明市场的发展。首先是高亮度LED效率的不断提升和高效率高可靠性恒流LED驱动电源的不断涌现,其次是全球立法禁止白炽灯照明和CFL节能灯的逐步淡出(它含有对环境有害的水银)。这些因素综合起来正使得LED照明成为一个长期的发展趋势。更重要的是,低成本(包括LED灯珠、散热系统和LED驱动器)是消费者广泛采用LED通用照明的原始推动力。除了节能减排的重大使命以外,LED相比于其他光源更可控的特点使其可能革命性的丰富人们的用光环境,提供许多新颖的光影世界。而实现这些应用最为关键的环节就是驱动:LED光源的大脑。更小体积、更少元件、更低成本、更强大,这些是市场对LED驱动电源的“苛刻”要求。 本文介绍的这种极简线路18W LED日光灯驱动方案,尺寸小于一枚一元硬币,成本是目前市场主流方案的一半左右,是顺应这种“苛刻”要求而生的。简单即完美的哲学在这种方案里发挥得淋漓尽致。 2. 1第三代非隔离LED恒流控制技术闭环算法TRUEC2简介
单片机基于80C51单片机的步进电机控制系统
中国地质大学长城学院 本科课程设计题目:基于80C51单片机的步进电机控制系统 系别信息工程系 学生姓名 专业电气工程及其自动化 学号 指导教师 职称讲师 2014 年6 月11 日
摘要 本文研究基于51系列单片机的步进电机控制系统设计,该系统包括以下几个部分:数据采集、数据处理、终端接收,该系统以汇编语言为单片机的驱动程序语言,单片机控制步进电机,主要任务是把二进制数变成脉冲序列,按相序输入脉冲以实现电机转动方向控制,利用单片机实现对步进电机的远距离实时监控,从而达到高效、节能的控制步进电机工作的目的,该系统具有成本低、控制方便的特点。使用单片机驱动四相步进电机,控制步进电机以四相八拍的方式运行,来实现步进电机正向/反向旋转,P1.0~P1.3分别控制步进电机;P1.5~P1.7分别控制步进电机的停止、正转、反转。 关键词:51单片机;步进电机;数据采集;汇编语言;
目录 摘要 0 1 设计目的 (1) 2设计内容与要求 (1) 3 总体设计方案 (1) 3.1整体方案 (1) 3.2具体方案实现 (1) 4系统硬件设计 (2) 4.1复位电路 (2) 4.2晶振电路 (2) 4.3按键电路 (3) 4.4指示灯电路 (3) 4.5驱动电路 (4) 4.6步进电机 (4) 5程序软件设计 (5) 5.1程序流程图 (5) 5.2源程序 (6) 6系统调试与仿真 (7) 7总结 (8)
1设计目的 1.掌握单片机控制步进电机的硬件接口电路。 2.掌握步进电机驱动程序的设计和调试方法。 3.熟悉步进电动机的工作特性。 2设计内容与要求 1.查阅资料,了解步进电机的工作原理。 2.通过单片机给定参数控制电机转动。 3.通过按钮控制正转、反转和停止。 3总体设计方案 3.1整体方案 本系统主要是由AT89C51,步进电机控制器ULN2004,步进电机,通过单片机编程,实现步进电机控制的脉冲分配,使电机实现正转,反转以及停止等功能 3.2具体实现方案 根据系统要求画出单片机控制步进电机的控制框图,见下图。系统包括单片机、按键、驱动电路和步进电机。 键盘80c51单片机 步进电机 驱动电路
步进电机控制实验
步进电机控制实验 一、实验目的: 了解步进电机工作原理,掌握用单片机的步进电机控制系统的硬件设计方法,熟悉步进电机驱动程序的设计与调试,提高单片机应用系统设计和调试水平。 二、实验容: 编写并调试出一个实验程序按下图所示控制步进电机旋转: 三、工作原理: 步进电机是工业过程控制及仪表中常用的控制元件之一,例如在机械装置中可以用丝杠把角度变为直线位移,也可以用步进电机带螺旋电位器,调节电压或电流,从而实现对执行机构的控制。步进电机可以直接接收数字信号,不必进行数模转换,用起来非常方便。步进电机还具有快速启停、精确步进和定位等特点,因而在数控机床、绘图仪、打印机以及光学仪器中得到广泛的应用。 步进电机实际上是一个数字/角度转换器,三相步进电机的结构原理如图所示。从图中可以看出,电机的定子上有六个等分磁极,A、A′、B、B′、C、C ′,相邻的两个磁极之间夹角为60o,相对的两个磁极组成一相(A-A′,B-B′,C-C′),当某一绕组有电流通过时,该绕组相应的两个磁极形成N极和S极,每个磁极上各有五个均匀分布矩形小齿,电机的转子上有40个矩形小齿均匀地分布的圆周上,相邻两个齿之间夹角为9°。 当某一相绕组通电时,对应的磁极就产生磁场,并与转子形成磁路,如果这时定子的小齿和转子的小齿没有对齐,则在磁场的作用下,转子将转动一定的角度,使转子和定子的齿相互对齐。由此可见,错齿是促使步进电机旋转的原因。 三相步进电机结构示意图 例如在三相三拍控制方式中,若A相通电,B、C相都不通电,在磁场作用下使转子齿和A相的定子齿对齐,我们以此作为初始状态。设与A相磁极中心线对齐的转子的齿为0
步进电机驱动及控制专业技术解答
步进电机驱动及控制技术解答 1.步进电机为什么要配步进电机驱动器才能工作? 步进电机作为一种控制精密位移及大范围调速专用的电机, 它的旋转是以自身固有的步距角角(转子与定子的机械结构所决定)一步一步运行的, 其特点是每旋转一步,步距角始终不变,能够保持精密准确的位置。所以无论旋转多少次,始终没有积累误差。由于控制方法简单,成本低廉,广泛应用于各种开环控制。步进电机的运行需要有脉冲分配的功率型电子装置进行驱动, 这就是步进电机驱动器。它接收控制系统发出的脉冲信号,按照步进电机的结构特点,顺序分配脉冲,实现控制角位移、旋转速度、旋转方向、制动加载状态、自由状态。控制系统每发一个脉冲信号, 通过驱动器就能够驱动步进电机旋转一个步距角。步进电机的转速与脉冲信号的频率成正比。角位移量与脉冲个数相关。步进电机停止旋转时,能够产生两种状态:制动加载能够产生最大或部分保持转矩(通常称为刹车保持,无需电磁制动或机械制动)及转子处于自由状态(能够被外部推力带动轻松旋转)。步进电机驱动器必须与步进电机的型号相匹配。否则将会损坏步进电机及驱动器。 2.什么是驱动器的细分?运行拍数与步距角是什么关系? “细分”是针对“步距角”而言的。没有细分状态,控制系统每发一个步进脉冲信号,步进电机就按照整步旋转一个特定的角度。步进电机的参数,都会给出一个步距角的值。如110BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这是步进电机固有步距角。通过步进电机驱动器设置的细分状态,步进电机将会按照细分的步距角旋转位移角度,从而实现更为精密的定位。以110BYG250A电机为例,列表说明: 可以看出,细分数就是指电机运行时的真正步距角是固有步距角(整步)的几分指一。例如,驱动器工作在10细分状态时,其步距角只有步进电机固有步距角的十分之一。当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,步进电机旋转1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18°。其实,细分就是步进电机按照微小的步距角旋转,也就是常说的微步距控制。当然,不同的场合,有不同的控制要求。并不是说,驱动步进电机必须要求细分。有些步进电机的步距角设计为3.6°、7.5°、15°、36°、180°,就是为了加大步距角,以适应特殊的工况条件。细分功能,只由驱动器采用精确控制步进电机的相电流方法,与步进电机的步距角无关,而与步进电机实际工作状态相关。 运行拍数与驱动器细分的关系是:运行拍数指步进电机运行时每转一个齿距所需的脉冲数。例如:110BYG250A电机有50个齿,如果运行拍数设置为160,那么步进电机旋转
步进电机驱动控制系统设计(有程序)
目录 一前言 (1) 二总体方案设计 (1) 1工作原理 (1) 2方案选择 (1) 2.1时钟脉冲 (1) 2.2脉冲分配器 (1) 2.3驱动器 (1) 3 总的框架 (2) 三单元模块设计 (2) 1单片机模块 (2) 1.1复位控制 (3) 1.2单片机频率 (3) 2接口 (3) 3驱动器ULN2003 (4) 4按键模块 (5) 5步进电机 (5) 5.1工作原理 (5) 5.2 28BYJ48型四相八拍 (7) 四整机调试与技术指标测量 (8) 五设计总结 (8) 参考文献 (9) 附录1电路原理图 (10) 附录2 源程序 (11)
一、前言 步进电动机是一种将电脉冲信号转换成机械位移的机电执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 二、总体方案设计 1、工作原理 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2、方案选择 (1)时钟脉冲 通常有两种方法实现: 方案一直接有硬件组成如:多谐振荡器 LC 等。 方案二用软件的方式形成优点便于随时更改,调整。 为了方便我们选用软件方式有单片机实现。 (2)脉冲分配器 方案一硬件环形分配器:由计数器等数字电路组成的。有较好的响应速度,且具有直观、维护方便等优点。 方案二软件环分:由计算机接口电路和相应的软件组成的。受到微型计算机运算速度的限制,有时难以满足高速实时控制的要求。由软件完成脉冲分配工作,不仅使线路简化,成本下降,而且可根据应用系统的需要,灵活地改变步进电机的控制方案。 考虑到硬件设备的有限和对步进电机的控制我们选择软件环分可以有单片机实现。 (3)驱动器 方案一使用功率场效应管的单电压功放电路。
步进电机的控制实验报告
步进电机的控制实验报告 一、实验目的 1.学习步进电机的工作原理。 2.了解步进电机的驱动电路。 3.学会用单片机控制步进电机。 二、实验器件 1.T IVA C 系列芯片,电机模块和LCD显示模块。 2.电脑以及CCS开发软件。 三、实验内容 设计一个简单的程序驱动步进电机并控制转速,通过LCD板上的滚轮装置可以调节步进电机的转速。 四、实验原理 双极性四线步进电机:一般双极性四线步进电机线序是 A B A/ B/, 其中A 与A/是一个线圈,B和B/是一个线圈,一般这种驱动需要的是H桥电路。 H双极性四线步进电机驱动相序: 1.单相四拍通电驱动时序 正转: A/ B A B/ 反转: B/ A B A/ 2.双相通电四拍驱动时序 正转:A/B AB AB/ A/B/ 反转:A/B/ AB/ AB A/B 3.半步八拍驱动时序 正转:A/ A/B B AB A AB/ B/ A/B/ 反转:A/B/ B/ AB/ A AB B A/B A/
DRV8833驱动芯片: DRV8833为玩具、打印机及其他机电一体化应用提供了一款双通道桥式电机驱动器解决方案。该器件具有两个H 桥驱动器,并能够驱动两个直流(DC)电刷电机、一个双极性步进电机、螺线管或其他电感性负载。每个H桥的输出驱动器模块由N沟道功率MOSFET组成,这些MOSFET被配置成一个H桥,以驱动电机绕组。每个H桥都包括用于调节或限制绕组电流的电路。借助正确的PCB设计,DRV8833的每个H桥能够连续提供高达1.5-ARMS(或DC)的驱动电流(在25℃和采用一个5VVM电源时)。每个H桥可支持高达2A的峰值电流。在较低的VM电压条件下,电流供应能力略有下降。该器件提供了利用一个故障输出引脚实现的内部关断功能,用于:过流保护、短路保护、欠压闭锁和过热。另外,还提供了一种低功耗睡眠模式。 DRV8833内置于16引脚HTSSOP封装或采用PowerPAD?的QFN封装(绿色环保:RoHS和无Sb/Br)。 图1 H桥电路真值表 设计思路:使用单相四拍通电驱动时序驱动步进电机。用单片机生成四个占空比为25%相位逐个延迟90度的PWM信号,按照特定顺序输入到驱动芯片的AIN1、AIN2、BIN1、BIN2引脚。通过调节LCD模块上的滚轮来调节PWM信号的周期从而控制步进电机的转速。调节的频率范围是25HZ-50HZ。步进电机的转速信息通过传感器采样送到单片机,信息处理后送到LCD显示模块显示。 实验主程序: int main(void) { uint32_t pui32ADC0Value[1]; // 保存ADC采样值 int speed = 0; uint32_t cur_Period, old_Period = 0; // 根据滚轮ADC转换值换算出当前的时间周期值 // 系统时钟设置 SysCtlClockSet(SYSCTL_SYSDIV_64 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ); // 初始化滚轮 Init_ADCWheel();
步进电机驱动器控制信号接口说明
. .. 步进电机驱动器控制信号接口说明 驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路: 1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移, 或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。 2.方向电平信号 DIR:此信号决定电机的旋转方向。比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方 向逆时针旋转。此种换向方式,我们称之为单脉冲方式。另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。用户使用何种方式,由拨位开关设定。 3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。 为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。 驱动器输入信号内部接口示意图 如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。 如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA; -18mA≤低电流≤0.2mA。 不管是电压信号还是电流信号,最终转化为光耦器件的输入电流以达到信号传输的目的(参考上图),如果电压信号的幅值超出以上要求的范围须在外部另加限流电阻R,保证给驱动器内部光耦提供7-18mA的驱动电流,参见下图和下表。 步进电机的运行是由脉冲信号控制的,步进电机在脉冲信号的有效沿到来的时刻移动一个步距角,本系列驱动器的有效沿是指:脉冲信号电流“由小到大”的时刻,或者说脉冲电平“由低到高”的时刻,或者说是驱动器内部光耦“由截止到打开”的时刻。 脉冲信号的频率要求不大于200KHz; 脉冲信号的宽度要求不小于2μS。 脉冲信号的驱动电流要求为7-18mA 电机换向时,一定要在电机降速停止后再换向。换向信号要求在前一个方向的最后一个脉冲有效沿结束至少5μS以上才能改变换向信号,且不滞后下一个脉冲信号的有效沿。 如果使用双脉冲CW/CCW方式,则要求下一个方向的第一个脉冲(如CCW)在前一个方向的最后一个脉冲(CW)有效沿后至少5μs才能有效。
LED恒流驱动及恒流IC大盘点
LED恒流驱动简介 由于LED是特性敏感的半导体器件,又具有负温度特性,因而在应用过程中需要对其进行稳定工作状态和保护,从而产生了驱动的概念。LED器件对驱动电源的要求近乎于苛刻,LED不像普通的白炽灯泡,可以直接连接220V的交流市电。LED是2~3伏的低电压驱动,必须要设计复杂的变换电路,不同用途的LED灯,要配备不同的电源适配器。国际市场上国外客户对LED驱动电源的效率转换、有效功率、恒流精度、电源寿命、电磁兼容的要求都非常高,设计一款好的电源必须要综合考虑这些因数,因为电源在整个灯具中的作用就好比像人的心脏一样重要。 LED驱动电源把电源供应转换为特定的电压电流以驱动LED发光的电压转换器,通常情况下:LED驱动电源的输入包括高压工频交流(即市电)、低压直流、高压直流、低压高频交流(如电子变压器的输出)等。而LED驱动电源的输出则大多数为可随LED正向压降值变化而改变电压的恒定电流源。LED电源核心元件包括开关控制器、电感器、开关元器件(MOSfet)、反馈电阻、输入滤波器件、输出滤波器件等等。根据不同场合要求、还要有输入过压保护电路、输入欠压保护电路,LED开路保护、过流保护等电路。 LED的恒流驱动 用LED作为显示器或其他照明设备或背光源时,需要对其进行恒流驱动,主要原因是: 1. 避免驱动电流超出最大额定值,影响其可靠性。 2. 获得预期的亮度要求,并保证各个LED亮度、色度的一致性 3.能有效的避免雷击,电网的浪涌,过电流,过电压的保护,使LED寿命提高。 存在问题: 要处理好散热问题,散热问题没有处理好就会影响LED寿命。 目前LED均采用直流驱动,因此在市电与LED之间需要加一个电源适配器即LED 驱动电源。它的功能是把交流市电转换成合适LED的直流电。根据电网的用电规则和LED 的驱动特性要求,在选择和设计LED驱动电源时要考虑到以下几点: 1.高可靠性 特别像LED路灯的驱动电源,装在高空,维修不方便,维修的花费也大。 2.高效率 LED是节能产品,驱动电源的效率要高。对于电源安装在灯具内的结构,尤为重要。因为LED的发光效率随着LED温度的升高而下降,所以LED的散热非常重要。电源的效率高,它的耗损功率小,在灯具内发热量就小,也就降低了灯具的温升。对延缓LED的光衰有利。 3.高功率因素 功率因素是电网对负载的要求。一般70瓦以下的用电器,没有强制性指标。虽然功率不大的单个用电器功率因素低一点对电网的影响不大,但晚上大家点灯,同类负载太集中,会对电网产生较严重的污染。对于30瓦~40瓦的LED驱动电源,据说不久的将来,也许会对功率因素方面有一定的指标要求。 4.驱动方式 现在通行的有两种:其一是一个恒压源供多个恒流源,每个恒流源单独给每路LED 供电。这种方式,组合灵活,一路LED故障,不影响其他LED的工作,但成本会略高一点。另一种是直接恒流供电,LED串联或并联运行。它的优点是成本低一点,但灵活性差,还要解决某个LED故障,不影响其他LED运行的问题。这两种形式,在一段时间内并存。多路恒流输出供电方式,在成本和性能方面会较好。也许是以后的主流方向。 5.浪涌保护
步进电机工作原理、驱动控制系统与选型
步进电机工作原理、驱动控制系统与选型 一、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て。 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A 相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,
电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。 不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。 不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。 3、力矩: 电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力 F与(dФ/dθ)成正比 其磁通量Ф=Br*S ;Br为磁密;S为导磁面积; F与L*D*Br成正比;L为铁芯有效长度;D为转子直径;Br=N·I/RN·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。 力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态) 因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。 (二)感应子式步进电机
步进电机实验报告剖析
北华航天工业学院 课程设计报告(论文) 课程名称:微机控制技术课程设计 设计课题:步进电机的控制系统 专业班级: 学生姓名: 指导教师: 设计时间:2013年06月11日
北华航天工业学院电子工程系 微机控制技术课程设计任务书 姓名:专业:班级: 指导教师:职称:教授时间:2013.6.11 课程设计题目:步进电机的控制系统 设计步进电机单片机控制系统,其功能如下: 1.具有对步进电机的启停、正反转、加减速控制; 2.控制按钮分别为正转、反转、加速、减速、以及停止键; 3.能够通过三位LED数码管(或液晶显示器)显示当前的转动速度,并且由两只不同颜色的发光二极管分别指示正转和反转,因此可以清楚的显示当前转动方向和转速; 4.要求每组选择的步进电机控制字不同; 5.用单片机做控制微机; 应用软件:keil protues 成果验收形式: 1.课程设计的仿真结果 2.课程设计的报告书 参考文献: 【1】张家生. 电机原理与拖动基础【M】. 北京:北京邮电大学出版社,2006. 【2】马淑华,王凤文,张美金. 单片机原理与接口技术【M】.北京:北京邮电大学出版社,2007. 【3】顾德英,张健,马淑华.计算机控制技术【M】. 北京:北京邮电大学出版社,2006. 【4】张靖武,周灵彬. 单片机系统的PROTEUS设计与仿真【M】. 北京:电子工业出版社,2007 第16周 时间 安排 指导教师教研室主任: 2013年06 月11日
内容摘要 步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。 关键词:步进电机单片机数码管显示
步进电机驱动之全桥驱动与斩波恒流
步进电机驱动之全桥驱动与斩波恒流 先看两相绕组的全桥驱动电路,四路基本相同的驱动电路,抓取一组电路来分析: 全桥驱动电路,其中Q7和Q8基极和发射极短接,相当于一个反向的二极管。 为了便于分析,将原理图简化后如下所示:
查看IM2000S芯片手册,对全桥驱动芯片输入脚的定义如下: 以上四个输入端:B相高低端全桥控制信号,用来控制离散的PN,NN的全桥或者半桥IC. 从上述可以知道,输出的是一个离散量,那么,是怎样控制电机,使电机获得一个sin和cos 的电流信号而驱动电机的呢? 这里要深入理解一个概念:斩波恒流! 斩波恒流的原理是:当环形分配器导通的时候,IC2使得TL和TH导通,电源通过TH和TL 和电机向下有电流输出,此时R左端的电压上升,当电流上升到给定电平时,比较器反转,输出为低,使得IC1截止,此时电感使电流缓慢下降,此时通过TL采样的电压变低,当电压低于给定电平时候,比较器反转,使得IC1再次导通,这样可以快速的波动,而使电感上的电流保持一个恒定的值。当环形分配器给出低电平时,IC1和IC2截止,电流通过D2流入电源,从而实现节能。 此时,再看上图,会发现: 1、BHO和ALO为一个通路,AHO和BLO为一个通路,实现电流的正向和反向。 2、BHO和AHO的开关频率会比BL0,ALO大很多,BL0和ALO只有在正向和负方向反转的时 候出现跳变,而BHO和AHO的频率会很快以实现恒流。
这里值得注意的一点是,上述过程仅仅是在一个细分时候,一个数模转换量上保持的恒流。如果整步为256细分,则在256细分的每一个细分阶段实际上过程就是上文红色字体运行一遍的一个过程,而要使整个电机转动一圈,则需要完成一个SIN和COS的整个过程,如果上面的过程仍然无法理解,请参看步进电机细分方面的内容。 从整个驱动电路的系统上看, 整个闭环是按照如下进行工作的:
步进电机控制驱动电路设计.
实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号:201216020134 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩:
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1kohm 1kohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
图五三相六拍正转 利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。 方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。 图六单,双三拍的电路图 单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
详解大功率LED恒流驱动原理
详解大功率LED 恒流驱动地设计原理 时间:2018-01-03 15:16:32 来源:作者: 0 引言 光伏发电行业作为一种新兴行业,其发展具有突飞猛进地趋势.光伏照明是光伏产业中地支柱产业.由于光伏电池所发出来地电如果不经过一次变换地话是直流电,因此,LED 光源作为一种直流电光源,尤其适合光伏照明产业.但是,LED 地高效节能地优点要想保证地话,其驱动具有尤为重要地作用.本文对大功率LED 和小功率LED 适合地驱动进行了比较研究.并且提出一种基于PT4115地高效率地大功率LED 恒流驱动解决方案.该种驱动电路简单、高效、成本低,适合当今太阳能产品地市场化发展.b5E2RGbCAP 1 LED 工作特性 LED 具有对电压敏感地特性,当LED 两端电压超过其导通电压后.可近似地认为其正向电压VF和正向电流IF 成比例关系.因此,电压地变化会引起电流地变化.p1EanqFDPw 图1 LED 地VF 和IF 特性曲线线 从图1 可以看出电压地微小变化会引起电流地极大变化.由此,可以得出对于LED 应该采用恒流驱动,防止流过LED 电流地极大波动,影响LED 地使用寿命.因此,不管是交流恒流驱动还是直流恒流驱动,其输出端LED 两端电压地峰峰值最好控制电流在几十毫 安.DXDiTa9E3d 2 LED 常用驱动技术比较研究 2. 1 电阻镇流驱动 图2 采用镇流电阻驱动地原理图 从图2 中可见,采用电阻镇流地驱动方式就是在LED 灯串上串联上镇流电阻.通过镇流电阻降低在LED 灯串上地电压,防止LED 过压被击穿.镇流电阻地驱动方式实际上就是通常所说地恒压驱动方式.该种驱动方式虽然简单,但是在镇流电阻上会有损耗,并且,损耗会随输入电压地增大而增大.因此,该种技术作为最早地驱动技术,已经随着技术地发展,逐渐被取代.RTCrpUDGiT
步进电机 驱动器 控制器三者的关系
电机行业专业求职平台 1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况 下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。步进电机必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。它涉及到机械、电机、电子及计算机等许多专业知识。 提及此知识,希望能给予正在对电机选型的客户有所帮助。 2.力矩: 电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度,则产生力 F与(dФ/dθ)成正比 S 其磁通量Ф=Br*S Br为磁密,S为导磁面积 F与L*D*Br成正比 L为铁芯有效长度,D为转子直径 Br=N·I/R N·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。 力矩=力*半径 力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态) 因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。 一、混合式步进电机
电机行业专业求职平台1、特点: 混合式(又称感应子式步进电机)与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 混合式步进电机某种程度上可以看作是低速同步电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运 行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C= A ,D=B . 一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相, 而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,更可以作二相电机绕组串联或并联使用。 2、分类 混合式步进电机可分二相、三相、四相、五相等,我公司混合式步进电机以相数可分为:二相电机、三相电机: TEB20H,TEB28H,TEB35H,TEB39H,TEB42H,TEB57H,TEB86H,TEB110 H,TEC57H,TEC86H,TEC110H,TEC130H. 3、步进电机的静态指标术语 相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半 步)。 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
基于单片机的步进电机驱动控制
基于单片机的步进电机驱动控制 一、步进电机概述 1.步进电机的定义 步进电机指的是以数字脉冲信号作为电机线或教位移的控制信号,并以数字脉冲频率对电机的转速进行控制的动力控制系统。 在负载正常范围的情况下,步进电机的运行状态只和数字脉冲发生器提供的信号的频率和脉冲占空比有关,一般情况下,电机的状态不受负载的影响。电机的运行角度只和每次所给予的脉冲信号强度有关,而电机的运行速度也只和脉冲信号的频率有直接关 系。这种采用弱点控制强电的控制方式使得步进电机在速度、位移等控制领域有着普通电机不能比拟的优势。 2.驱动控制系统框图 步进电机控制系统有着精确控制、运行稳定的特性,这一其他电机不能比拟的优势使得步进电机得到了广泛的应用。而一般对步进电机控制系统的驱动必须要包含脉冲信 号发生部分,功放部分和驱动控制部分等几个模块电路,我们根据这些通过的模块电路,可将步进电机控制系统的通用框图绘制如下: 在上图的步进电机驱动控制系统方框图中,控制步进电机运行状态的脉冲信号一 般由集成芯片产生,可以是单片机、等智能芯片,也可以是一般的数字电路集成芯片。信号分配环节则要根据步进电机的型号来选择,如四相步进电机有四相四拍和四相 八拍种信号分配的方式;两相步进电机有两相四拍和八拍等脉冲加载形式。功放部分 在驱动环节上显得尤为重要。动态平均电流是步进电机转矩大小的决定因素,前提条件 是电机的速度。电机力矩与平均电流成正比,驱动系统对电机的反电势消弱越多,则平 均电流就越大。 我们一般可以用恒压和恒压串电阻的方法来驱动,或者在条件允许的情况下我们可以用高低压驱动、恒流和细分数等方法来驱动实际的应用过程种,多采用数字集成驱 动芯片作为步进电机的驱动手段。 二、现阶段国内外步进电机驱动的常用方式 1.变频器控制方式 使用变频器对步进电机进行驱动控制时,可以很好的解决步进电机在启动和停止时 容易失步的问题,提高了系统的控制精度。但是变频器的应用成本较高,结构和操作也 比较复杂,无形中提高步进电机的控制难度。 2.PLC控制方式 使用ABB、西门子、欧姆龙等国际知名生产制造商研发的系列产品可以 实现对步进电机的理想化控制,但是基于核心的步进电机控制系统成本高昂,且 难以实现精确控制,在本系统中不太适合。 3.单片机控制方式 随着嵌入式系统在工业控制领域中的广泛应用,以单片机特别是系列单片机 作为控制核心的步进电机控制电路在生产生活领域得到了普及,单片机有着大规模数字
SM7307——8-18W恒流驱动方案
SM7307非隔离BUCK恒流控制功率开关 v1.6 SM7307
内部功能框图 管脚序号管脚名称管脚说明 1 FB 反馈引脚 2 VDD 内部电源 3 NC 悬空脚 4 DRAIN 内置功率MOS漏极输入 5、6 CS LED灯串电流采样输入端 7、8 GND 芯片地
极限参数 极限参数(TA= 25) ℃ 符号说明范围单位DRAIN 供电电压-0.3~730 V V CS CS输入电压-0.3~8 V VDD 芯片内部电源-0.3~8 V V FB FB输入电压-0.3~8 V T J 允许的工作温度-40 ~ 125 ℃T stg存储温度-55 ~ 150 ℃V ESD ESD耐压2000 V 电气工作参数 (除非特殊说明,下列条件均为TA=25℃,VDD=5.8V) 符号说明条件范围 单位最小典型最大 I DD_OPER静态工作电流DRAIN=20V 0.25 1.0 mA DRAIN-DC输入直流电压范围直流输入电压20 730 V I IN_MAX DRAIN对VDD提供电流DRAIN=20V 1 mA V DD芯片电源 6 V V TH_CS电流侦测峰值门槛电压600 mV T LEB消隐时间400 nS T OFFmin最小关闭时间 5 uS V FBH过压保护阈值 4 V V FBL短路保护阈值0.2 V BV DS击穿电压730 V Ron 导通电阻17 ohms
功能表述 SM7307是一款高效率的PWM-LED 恒流芯片,无需补偿元件,即可实现恒定的输出电流。外围元件少,方案成本低。 SM7307内置前沿消隐(LEB )电路,防止由于开关噪音等原因产生的误关断。LEB 时间后,当流过开关管的电流使得CS 端的电压达到其比较阈值电压时,CS 反馈信号关闭开关管。 CS 电阻的计算公式可以表述为: R = 0.6V 2?I ◆ 内部稳压器 DRAIN 端口通过JFET 对VDD 电容充电,利用稳压管的稳压特性,从而稳定VDD 的电压。 ◆ 恒流部分 芯片通过CS 端口限制电流峰值,并通过FB 端口检测电感电流过零时开始开关,从而确定了流过电感的高低压电流值,从而输出恒流。 SM7307非隔离BUCK 恒流控制功率开关v1.6
电机驱动模块的使用
共享知识分享快乐 电机驱动模块的使用 2015212822 号学 张家梁学生姓名 应用物理学(通信基础科学)专业名称 理学院所在系(院) 指导教师韩康榕
日月年2017 4 4 卑微如蝼蚁、坚强似大象. 共享知识分享快乐 电机驱动模块的使用 张家梁 () 100876北京邮电大学,北京摘要:实验中使用电机驱动模块,采用一片双通道H桥电流控制电机驱动器DRV8833,可以同时驱动两个直流电机或一个步进电机,可通过代码改变DRV8833控制信号的占空比来改变电机的转速或LED的亮度,可以通过电流表、电压表、示波器等来完成对具体观测点的测量,对数据分析后验证功能是否正常。 信号驱动;示波器;PWM关键词:直流电机;步进电机;TI Cortex M4 The Use of Motor Drive Module JiaLiang Zhang (Department of Applied Physics, Beijing, BJ 10, China) Abstract:The motor drive module is used in the experiment,. The dual-channel H-bridge current control motor driver DRV8833 can drive two DC motors or one stepper motor at the same time. The duty cycle of the DRV8833 control signal can be changed by code to change the motor speed or LED Of the brightness, you can through the ammeter, voltmeter, oscilloscope, etc. to complete the measurement of the specific point of view, after the data analysis function is normal. Keywords: DC motor; stepper motor; TI Cortex M4; PWM signal driver; oscilloscope. 1引言 电机驱动模块包括直流电机和步进电机,同时由PWM信号驱动,从而改变电机转速。 直流电机的驱动程序需要液晶、滚轮、Tiva的PWM输出、定时器等多个模块共同配合完成。液晶用于显示电机转数、滚轮用来调节PWM 的占空比从而控制电机的转速、PWM 输出用于驱动直流电机旋转、而定时器则是用来检测电机的旋转数度。 2 实验原理 1.电机驱动模块布局 卑微如蝼蚁、坚强似大象. 共享知识分享快乐 2.直流电机的控制与测速 电路等效原理结构图: