动力学模型
月球软着陆控制系统综合仿真及分析(课程设计)
在月球探测带来巨大利益的驱使下,世界各国纷纷出台了自己的探月计划,再一次掀起了新一轮探月高潮。在月球上着陆分为两种,一种称为硬着陆,顾名思义,就是探测器在接近月球时不利用制动发动机减速而直接撞击月球。另一种称为软着陆,这种着陆方式要求探测器在距月面一定高度时开启制动系统,把探测器的速度抵消至零,然后利用小推力发动机把探测器对月速度控制在很小的范围内,从而使其在着陆时的速度具有几米每秒的数量级。显然,对于科学研究,对探测器实施月球软着陆的科学价值要大于硬着陆。
1月球软着陆过程分析
目前月球软着陆方式主要有以下两种方式:
第一种就是直接着陆的方式。探测器沿着击中轨道飞向月球,然后在适当的月面高度实施制动减速,最终使探测器软着陆于月球表面。采用该方案时,探测器需要在距离目标点很远时就选定着陆点,并进行轨道修正。不难发现,该方法所选的着陆点只限于月球表面上接近轨道能够击中的区域,所以能够选择的月面着陆点的区域是相当有限的。
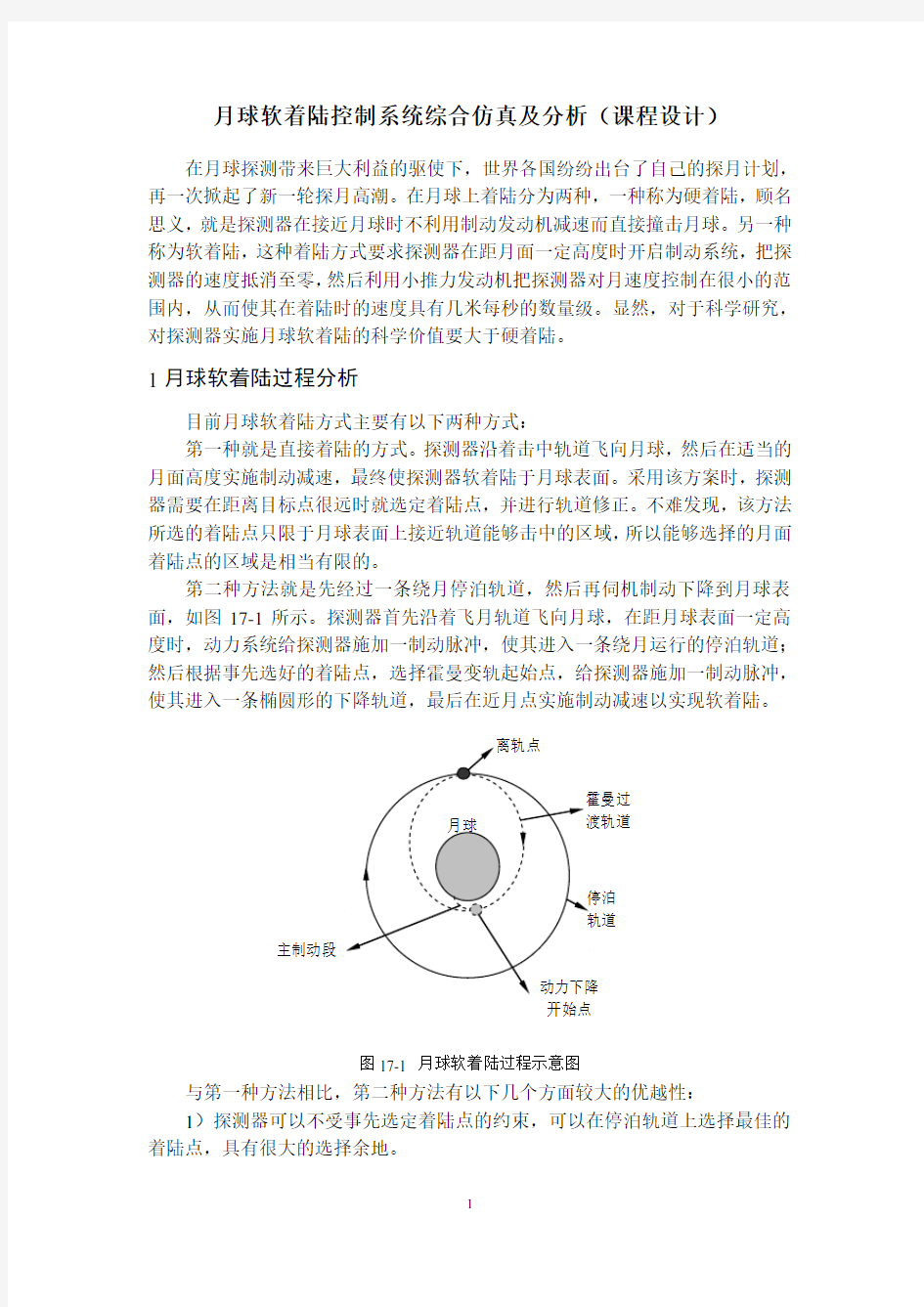
第二种方法就是先经过一条绕月停泊轨道,然后再伺机制动下降到月球表面,如图17-1所示。探测器首先沿着飞月轨道飞向月球,在距月球表面一定高度时,动力系统给探测器施加一制动脉冲,使其进入一条绕月运行的停泊轨道;然后根据事先选好的着陆点,选择霍曼变轨起始点,给探测器施加一制动脉冲,使其进入一条椭圆形的下降轨道,最后在近月点实施制动减速以实现软着陆。
主制动段
开始点
图17-1 月球软着陆过程示意图
与第一种方法相比,第二种方法有以下几个方面较大的优越性:
1)探测器可以不受事先选定着陆点的约束,可以在停泊轨道上选择最佳的着陆点,具有很大的选择余地。
2)在停泊轨道上,可以对探测器上的设备进行全面的检查、修正,为下一步的霍曼变轨段做好准备。如果是载人登月,停泊轨道还可以给航天员以充足的准备时间,做好心理等方面的准备。
3)由于可以把轨道舱停留在停泊轨道上,而只控制着陆舱(包括下降发动机、推进剂、GNC系统和在月面上作业的有效载荷等)降到月球表面,故可以减少探测器着陆部分的质量,从而减少着陆过程推进剂的消耗。
4)在载人登月时,如果发生紧急情况,飞船可以从停泊轨道转入返回地球的过渡轨道。
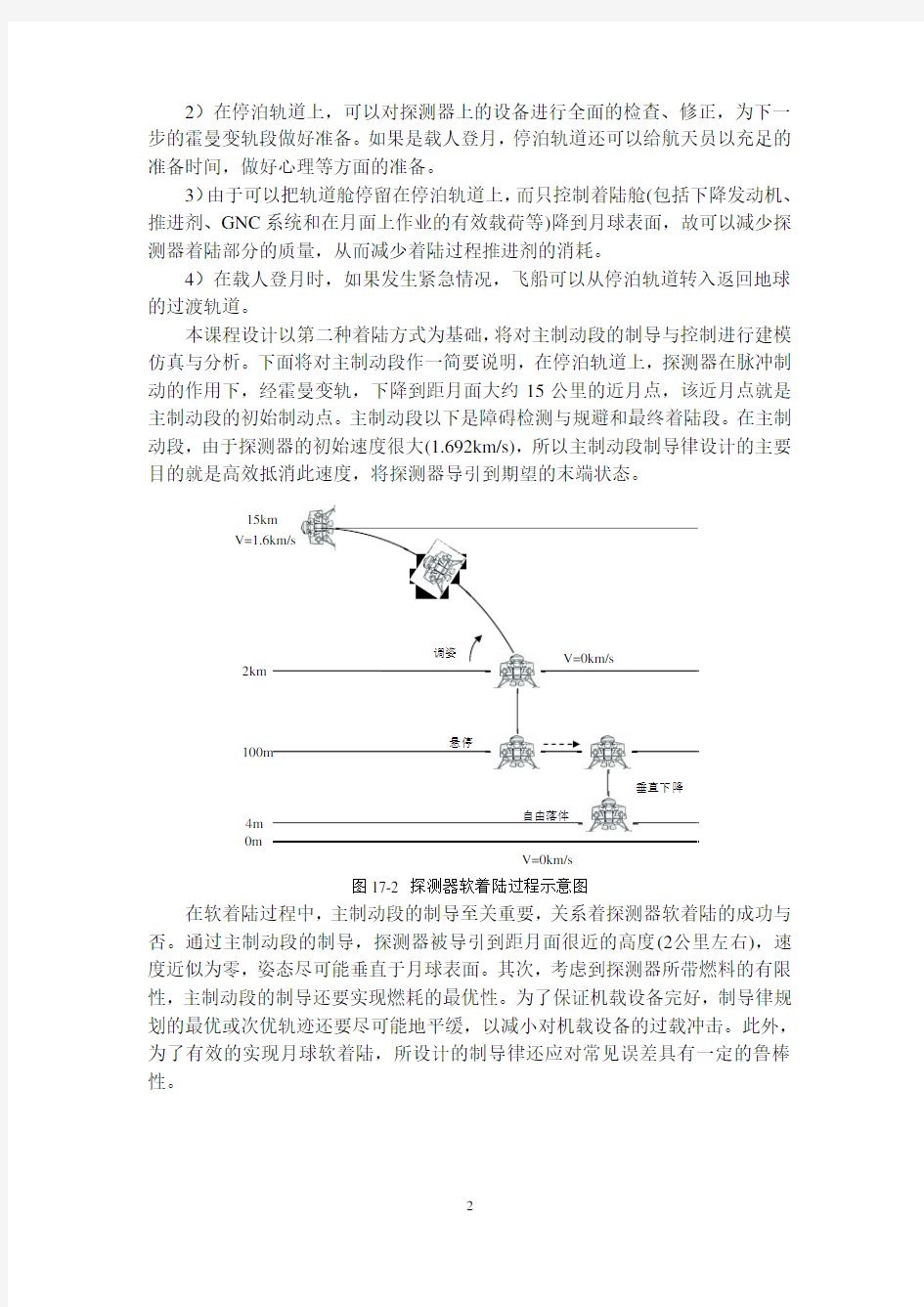
本课程设计以第二种着陆方式为基础,将对主制动段的制导与控制进行建模仿真与分析。下面将对主制动段作一简要说明,在停泊轨道上,探测器在脉冲制动的作用下,经霍曼变轨,下降到距月面大约15公里的近月点,该近月点就是主制动段的初始制动点。主制动段以下是障碍检测与规避和最终着陆段。在主制动段,由于探测器的初始速度很大(1.692km/s),所以主制动段制导律设计的主要目的就是高效抵消此速度,将探测器导引到期望的末端状态。
垂直下降
0m
V=0km/s
图17-2 探测器软着陆过程示意图
在软着陆过程中,主制动段的制导至关重要,关系着探测器软着陆的成功与否。通过主制动段的制导,探测器被导引到距月面很近的高度(2公里左右),速度近似为零,姿态尽可能垂直于月球表面。其次,考虑到探测器所带燃料的有限性,主制动段的制导还要实现燃耗的最优性。为了保证机载设备完好,制导律规划的最优或次优轨迹还要尽可能地平缓,以减小对机载设备的过载冲击。此外,为了有效的实现月球软着陆,所设计的制导律还应对常见误差具有一定的鲁棒性。
2月球软着陆动力学模型
首先定义两个月球软着陆坐标系。第一个是月心惯性坐标系I I I I O x y z :原点I O 选在月心,I I O x 轴指向动力下降起始点,I I O y 轴垂直于I I O x 轴指向着陆点方向,I I O z 轴按右手法则确定。探测器在空间的位置可由,,r αβ表示成球坐标的形式,r 为从月心到探测器的距离,,αβ表示月球经度和纬度。第二个就是探测器轨道坐标系o o o ox y z :原点选在探测器质心,o ox 轴与从月心到探测器质心的矢径方向重合,背离月心方向为正,o oy 轴垂直于o ox 轴指向运动方向为正,o oz 按右手法则确定。制动推力F 的方向与探测器本体轴重合,,ψ?为在轨道坐标系中表示的推力方向角(如图17-3所示)。假设制动发动机为常推力液体发动机,忽略月球自转,则月球软着陆动力学方程可表示为:
3u μm r
?F r r =
(17-1) 其中: ()=+2++′′′××××r
r ωr ωr ωωr r 是探测器月心距矢径,′′′r ,r 分别表示径向加速度和速度,ω为轨道坐标系相对惯性系的角速度矢量,u 为制动推力开关控制函数,μ为月球引力常数,m 为探测器质量。用u v w 、、表示上述动力学方程可得 )()())
2222sin cos sin cos tan sin sin tan r u v r
w r u
Fu m r v w r v
Fu m uv r w r w Fu m uw r v w r m
F C βαβψμψ?βψ?β?=?=??=??=?++??=?+??=????=?? (17-2) 其中:F 常推力发动机推力大小,ψ?、为轨道坐标系下推力矢量的方向角;sp E C I g =,sp I 为发动机比冲,E g 为地表重力加速度常数。
I y I
图17-3 软着陆坐标系 3月球软着陆制导控制方案
在月球软着陆任务中,主制动段制导律设计是整个着陆任务中最重要的一环之一。首先,本节对探测器在轨道坐标系下建立动力学模型,根据简化动力学方程,提出探测器径向最优轨迹模型,然后根据该模型设计多项式显式制导方法。在设计过程中,对探测器各速度矢量和加速度矢量之间的几何关系进行分析。
3.1径向最优轨迹模型研究
由方程(17-2)可以看出,月球软着陆动力学模型为一非线性系统,为求得显式制导律,有必要在不影响着陆目标的前提下对上述模型再作更进一步的简化。对于径向运动,假设在软着陆过程中月球引力场是均匀的,且引力加速度为一常
值2/L R μ,这里L R 为月球平均半径,则由图17-3可直接列写出径向动力学方程为:
2cos L
r
u F u m R μψ==? (17-3) 其中,r 和u 分别表示垂直方向的位置和速度。
对于探测器,有0/m m Ft C =?(0m 为探测器初始质量),当0/Ft C m <<时,可对推力加速度做一阶Taylor 展开
00(1F F Ft m m m C
=+ (17-4) 最优控制方向角可以分为两部分:一部分是用于满足目标点速度矢量所产生的控制角,一部分是用于满足目标点位置矢量所产生的附加控制角,且该部分为小量。由此,可设最优控制角ψ为
012p p t ψψ=++ (17-5)
其中0ψ为满足目标点速度矢量部分,1p 和p 2为满足目标点位置矢量所产生的附
加控制角量值参数,那么
01020cos cos sin sin p p t ψψψψ=?? (17-6)
将(17-5)式和(17-6)式代入(17-3)式可得
2220010202000001020sin (cos sin sin )(cos sin )L F F F F u p t p p t m C m m C m C
F p m R ψψψψμψψ=?+??+?? (17-7)
由前人工作可知,在径向方向的最优着陆轨迹可由一关于时间t 的四次多项式来完全表示
23401234r k k t k t k t k t =++++ (17-8)
其中,i k (i =0,1…4)为多项式的系数,可通过系统边值条件来确定。
在动力下降段,制动推力主要用来满足探测器终端速度约束,因此用于满足终端位置约束的控制推力仅占一小部分,也就是说10p →。此外,此阶段控制推力的设计要求高效率的抵消初始速度,因此制动推力角0ψ近似等于90度,则(17-7)式可近似表示为
22222200L
F F u p t p t m C m R μ=??? (17-9) 对(17-8)式求二阶导数可得
24321262r k t k t k =++ (17-10)
由(17-9)、(17-10)两式可得
4302k F k m C
= (17-11) 而0/Ft C m <<,所以可以忽略4k 。由此,可以分别用一个三次多项式和二次多
项式来近似表示探测器径向距离和径向速度。
3.2燃耗次优控制方向角确定
现在,根据上一节的推导,分别用一个关于局部时间τ的三次多项式和二次多项式来近似表示月心到探测器质心之间的距离r 和径向速度u
23
0123212323r k k k k u k k k τττττ=+++=++ (17-12)
这里的τ为局部时间,它以当前时刻t 为初始时刻,其取值范围为[0,]go t ,go t 为剩余时间,定义为探测器从当前时刻开始到达目标点所用的时间。(17-12)式中各系数可由以下初始条件和终端条件确定:
(0)r r =,()go f r t r =;(0)u u =,()go f u t u =
其中,f r 表示径向距离终端约束,f u 表示径向速度终端约束。由此可以求出(17-12)式各系数,得
223()()f go f go
go r r ut u u t k t ????= (17-13)
对(17-12)式u 求导可得当前时刻的径向加速度
226()2()2f go f go go r r ut u u t k t ????==
a (17-14)
I
I x
图17-4 轨道系下垂直平面内加速度矢量几何关系
图17-5 轨道系下水平面内速度矢量关系
下面来分析探测器各瞬时加速度矢量和速度矢量之间的几何关系。图17-4和图17-5分别为探测器在轨道坐标系下垂直平面内的加速度矢量几何关系示意图和水平面内的速度矢量几何关系示意图。其中a K 为径向加速度,F a K 为推力加速度,H a K 为加速度水平分量;V J K 为速度矢量在水平面内的投影,F V J K 为水平终端约束速度,C V J K 为由V J K 变到F V J K 所需的速度增量。由动力学方程(17-2)第四式可以看出,径向加速度a K 是由月球引力加速度、向心加速度和推力加速度径向分量组成的,根据图17-4各加速度矢量之间的几何关系即可写出推力角ψ的三角函数关系。在水平面中,水平加速度H a K 是产生水平速度增量C V J K 的主要原因,故可令C V J K 和H a K 同方向,由此可根据图17-4确定另一个控制角?的三角函数关系表达式。综合上述分析,可以写出控制变量ψ、?的表达式如下:
222cos((/()/)/)cos(()F f arc a r v w r a arc v v ψμ??=+?+??=???K (17-15) 在动力下降段,制导律的设计要求高效率地抵消水平方向的速度,换句话说,制动推力主要用来抵消探测器水平初始速度,因此,对于前面提到的剩余时间go t 可近似用下式来估计:
/go H t a = (17-16)
至此,式(17-14)(17-15)(17-16)就构成了多项式制导公式,其中,F a 和H a 可由加速度仪实时测得。分析上述公式可以看出,该制导律是剩余时间的函数,而剩余时间只与探测器当前状态和末端约束状态有关。此外,还可以看出,上述制导公式对末端位置没有约束,而只对月心到探测器质心之间的距离作了约束,所以初始速度变化(尤其是初始速度方向变化)对制导终端位置影响很大,这就导致在执行实际的制导任务过程中,对初始速度的测量精度提出了较高要求(见后面的仿真分析)。
说明:
(1) 从该制导律的求解过程可以看出,它是建立在一些假设的基础之上的,这些
假设所带来的误差会在探测器接近月球的过程中逐渐减小。
(2) 本制导律是一种燃耗次优制导律。它的求解是建立在最优控制的基础之上
的,但在求解过程中对剩余时间作了近似估计。
(3) 本制导律对探测器终端位置没有约束,
只对月心到探测器质心之间的径向距离作了约束,故初始速度的变化对探测器终端位置的影响很大,这就对探测器初始速度的测量精度提出了较高要求。当然,我们也可以根据无着陆位置约束这一点来对终端着陆位置进行调整,可在一定范围内实现定点软着陆。
(4) 由(17-16)式可以看出,它只是剩余时间的近似估计表达式。当探测器到达终
端位置时,剩余时间为零,这将导致ψ角在最末端出现突变,由ψ角的计算公式可以很容易看出。
4数学仿真分析内容
4.1仿真参数
在实际过程中,导航测量误差和系统参数偏差是影响软着陆制导精度的主要原因。然而,对闭环控制系统而言,测量误差可以通过滤波来消除,对系统的影响相对来说较小。而系统参数,如制动发动机的推力和比冲等都是不可测量量,它们都是事先标定给出的,在实际飞行过程中,这些参数会由于某些因素的影响而产生一定的偏差,所以,研究这些参数偏差对制导过程的影响就显得非常重要了。本部分将结合上述制导律,对制动发动机推力F 和比冲sp I 偏差(±10%)进行分析。此外,考虑到本制导律对终端位置没有约束,所以本部分还对初始纵向速度方向偏差对终端着陆位置的影响作了仿真分析。初始条件及末端约束条件如下:
推力器参数:1500F N =,300sp I s =,地表引力加速度29.8/E g m s =,sp E C I g =;
月球常数:月球引力常数12324.8877510/m s μ=×,月球半径1738L R km =; 初始参数:01753r km =,00β=度,05α=度,00/u m s =,01692/v m s =,00w =,0600m kg =;
终端参数:1740f r km =(探测器终止于离月面2km 的高度),0/f u m s =,0/f v m s =,0/f w m s =。
4.2仿真内容
1) 建立月球软着陆制导与控制系统仿真模型并进行仿真。 2) 对相关参数对软着陆性能的影响进行分析,包括以下几个方面:
(1) 发动机推力偏差(±10%)对软着陆过程的影响;
(2) 比冲偏差(±10%)对软着陆过程的影响;
(3) 初始速度方向偏差对软着陆过程的影响;
(4) 其它参数对软着陆过程的影响。
系统动力学模型 (1)
第10章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1节系统动力学概述 概念 系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室”; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算机仿真语言DYNAMIC的支持,如:PD PLUS,VENSIM等的支持;
5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特()提出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等着作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980年,后来,陆续做了大量的工作,主要表现如下: 1)人才培养 自从1980年以来,我国非常重视系统动力学人才的培养,主要
药物动力学模型 数学建模
药物动力学模型 一般说来,一种药物要发挥其治疗疾病的作用,必须进入血液,随着血流到达作用部位。药物从给药部位进入血液循环的过程称为药物的吸收,而借助于血液循环往体内各脏器组织转运的过程称为药物的分布。 药物进入体内以后,有的以厡型发挥作用,并以厡型经肾脏排出体外;有的则发生化学结构的改变--称为药物的代谢。代谢产物可能具有药理活性,可能没有药理活性。不论是厡型药物或其代谢产物,最终都是经过一定的途径(如肾脏、胆道、呼吸器官、唾液腺、汗腺等)离开机体,这一过程称为药物的排泄。有时,把代谢和排泄统称为消除。 药物动力学(Pharmacokinetics)就是研究药物、毒物及其代谢物在体内的吸收、分布、代谢及排除过程的定量规律的科学。它是介于数学与药理学之间的一门新兴的边缘学科。自从20世纪30年代Teorell 为药物动力学奠定基础以来,由于药物分析技术的进步和电子计算机的使用,药物动力学在理论和应用两方面都获得迅速的发展。至今,药物动力学仍在不断地向深度和广度发展。药物动力学的研究方法一般有房室分析;矩分析;非线性药物动力学模型;生理药
物动力学模型;药物药效学模型。下面我们仅就房室分析作一简单介绍。 为了揭示药物在体内吸收、分布、代谢及排泄过程的定量规律,通常从给药后的一系列时间 (t) 采取血样,测定血(常为血浆,有时为血清或全血)中的药物浓度( C );然后对血药浓度——时间数据数据(C——t数据)进行分析。 一一室模型 最简单的房室模型是一室模型。采用一室模型,意味着可以近似地把机体看成一个动力学单元,它适用于给药后,药物瞬间分布到血液、其它体液及各器官、组织中,并达成动态平衡的情况。下面的图(一)表示几种常见的给药途径下的一室模型,其中C代表在给药后时间t的血药浓度,V代表房室的容积,常称为药物的表观分布容积,K代表药物的一级消除速率常数,故消除速率与体内药量成正比,D代表所给刘剂量。 图(a)表示快速静脉注射一个剂量D,由于是快速,且药物直接从静脉输入,故吸收过程可略而不计;图(b)表示以恒定的速率K,静脉滴注一个剂量D;若滴注所需时间为丅,则K=D/丅。图(c)表示口服或肌肉注射一个剂量D,由于存在吸收过程,故图中分别
人体动力学模型与仿真研究
基于ADAMS人体动力学下肢建模与仿真 前言 人体生物力学研究的是一个多学科交叉的新兴领域,它涉及到机器人机构学、运动学、动力学、人体解剖学、外科学(特别是骨科)、摄影测量学、测试技术以及计算机辅助设计等多方面的知识。研究人体动力学的建模和仿真,获取有关运动、力学数据,对指导机电产品设计、运动康复机械设计等具有重要意义。为了满足人们的需要和安全,在一些实验中必须模拟人体作为实验对象。为了保证人体的安全和新设备的研发,因此在人体运动仿真研究中需要将人体作为某种程度的抽象,这种抽象既要尽可能反映人体的真实情况,又要易于实现。人体模型是车辆设计、动力学分析和服务型机器人设计与仿真的基础,为设计用的人体模型属于人体几何学/运动学模型,它还为动力学分析与仿真提供了必要的几何特性;为分析与仿真用的人体模型属于多体系统动力学模型。人体动力学模型是多体系统动力学在生物力学方面的最新研究成果,已在国外车辆动力学分析与仿真领域获得工程应用。如果从建模的方式来看人体模型种类可以分为以下两种。从仿真角度建模—人体仿真模型(目前主要是指运用计算机仿真软件进行人体多体仿真建模);从力学角度建模—动力学模型。 一、历史发展及现状 1.运动生物力学的国内外发展现状 有关生物体运动的力学问题很早就引起了人们的注意,早在15世纪末,意大利科学家Leonardo Da Vinci研究了人体的各种姿势和
运动,首先提出了“一切能够运动的生物体都遵循力学定律而运动”的重要观点。随着生命科学、力学和计算机技术的飞速发展,一门以研究人体力学行为特征为主的学科一运动生物力学诞生了。 运动生物力学作为一门学科,它的产生与发展,在我国还只有不到60年的历史。直到70年代后期,随着体育科学的全面进步和高科技的渗入,运动生物力学才真正活跃起来,并迅即发展成为体育科学体系中最体现现代高科技水平的学科之一。考察并分析运动生物力学的发展过程,在欣喜于运动生物力学已取得长足进步的同时, 我们还不得不承认,运动生物力学的理论基础是不完善的,在这方面的科学研究也几无进展。 人体运动分析是近年来计算机视觉领域中备受关注的前沿方向之一,是当代生物力学和计算机视觉相结合的一项重要技术,具有十分广阔和重要的应用领域,它在机器人学、仿生机械学、智能控制、人机交互、运动分析和虚拟现实等领域都有着广泛的应用。建模是研究人体运动的核心,目前的建模方法包括:有限元分析,多刚体动力学,肌肉一骨骼建模,振动力学,运动学建模以及实验等方法。 2.多体系统动力学研究的发展 多体系统动力学的核心问题是建模和求解问题,其系统研究开始于20世纪60年代。从60年代到80年代,侧重于多刚体系统的研究,主要是研究多刚体系统的自动建模和数值求解。 到了80年代中期,多刚体系统动力学的研究已取得一系列的成果,尤其是建模理论趋于成熟,但更稳定,更有效的数值求解仍然是
动力学模型
月球软着陆控制系统综合仿真及分析(课程设计) 在月球探测带来巨大利益的驱使下,世界各国纷纷出台了自己的探月计划,再一次掀起了新一轮探月高潮。在月球上着陆分为两种,一种称为硬着陆,顾名思义,就是探测器在接近月球时不利用制动发动机减速而直接撞击月球。另一种称为软着陆,这种着陆方式要求探测器在距月面一定高度时开启制动系统,把探测器的速度抵消至零,然后利用小推力发动机把探测器对月速度控制在很小的范围内,从而使其在着陆时的速度具有几米每秒的数量级。显然,对于科学研究,对探测器实施月球软着陆的科学价值要大于硬着陆。 1月球软着陆过程分析 目前月球软着陆方式主要有以下两种方式: 第一种就是直接着陆的方式。探测器沿着击中轨道飞向月球,然后在适当的月面高度实施制动减速,最终使探测器软着陆于月球表面。采用该方案时,探测器需要在距离目标点很远时就选定着陆点,并进行轨道修正。不难发现,该方法所选的着陆点只限于月球表面上接近轨道能够击中的区域,所以能够选择的月面着陆点的区域是相当有限的。 第二种方法就是先经过一条绕月停泊轨道,然后再伺机制动下降到月球表面,如图17-1所示。探测器首先沿着飞月轨道飞向月球,在距月球表面一定高度时,动力系统给探测器施加一制动脉冲,使其进入一条绕月运行的停泊轨道;然后根据事先选好的着陆点,选择霍曼变轨起始点,给探测器施加一制动脉冲,使其进入一条椭圆形的下降轨道,最后在近月点实施制动减速以实现软着陆。 主制动段 开始点 图17-1 月球软着陆过程示意图 与第一种方法相比,第二种方法有以下几个方面较大的优越性: 1)探测器可以不受事先选定着陆点的约束,可以在停泊轨道上选择最佳的着陆点,具有很大的选择余地。
研究控制非线性动力学模型
Study on Nonlinear Dynamical Model and Control Strategy of Transient Process in Hydropower Station with Francis turbine Haiyan Bao , Jiandong Yang, Liang Fu State Key Laboratory of Water Resources and Hydropower Engineering Science, Wuhan University No.8 Donghu South Road, Wuchang District, Wuhan 430072, China Haiyan_8931@https://www.360docs.net/doc/4c6431747.html, Abstract —The transient process in conduits of hydropower stations is a very complicated dynamic procedure coupled with fluid, machines, electricity. In this paper, a whole nonlinear dynamical model of transient process in hydropower station with Francis turbine has been developed, and the control strategies of each transient process are studied. The nonlinear characteristics of hydraulic turbine and the elastic water hammer effect of pressure water supply conduit are considered in the model. The developed model is accurate enough to represent and simulate each transient process of the plant and may enable a plant operator to carry out economical, convenient study for the static stability and transient stability of the hydropower station under a wide range of transient processes. In addition, the literature takes a hydropower station as engineering case to simulate the transient processes of hydro-generator units ’ start-up, load variation, full load rejection from the grid and emergency stop. And the results of simulation are very satisfied. Keywords-hydraulic transients; nonlinear mathematical model; numerical simulation; control strategy I.I NTRODUCTION H ydropower is an important and vital renewable energy resource, which converts energy in flowing water into electricity. Generally, a hydro-generator unit has many different operating conditions, and any operating condition changes will result in different hydraulic transients. The calculation of hydraulic transient is a key link for the safety and reliability of units and hydraulic installations. Traditionally, the objective of hydraulic transient calculation is to predict three primary regulation guaranteed parameters including the maximum dynamic pressure in the spiral case, the maximum rising ratio of rotating speed and the draft tube minimum pressure, consequently to ensure safety operation of hydropower station. H owever, with the development of hydroelectric construction and technology in China, the content of hydraulic transient calculation is continuously being enriched, it already not only include calculation of regulation guaranteed parameters, but also include calculation and research of stabilization and dynamic quality [1]. In conventional hydropower stations, there are a series of hydraulic transient processes, such as start-up, load variation, full load rejection from the grid, and emergency stop, where power and frequency regulations may always be needed [2]. In order to design suitable control law, stabilize the nonlinear systems, solve many existing control problems, reduce operating costs and energy losses, and improve guarantee security and safety of equipments and plants, it is necessary to develop a whole nonlinear dynamical model that is accurate enough to represent and simulate each transient process of the plant. The developed model may enable a control system designer or a plant operator to carry out accurate, economical, convenient study for the static stability and transient stability of the hydropower station under a wide range of operational modes and nonlinear process conditions, and to design the suitable control strategy, so as to improve stability of hydro-generator units. The literature review carried out in this work finds some published research works. In [3], a new kind of start-up rule is proposed, by using this rule the contradiction between fast start-up and smooth start-up is eliminated; In [4], it analyses the adjusting mode of power adjustment in digital electric-hydraulic governor, and how to realize power adjustment; In [5], the transient performance index of hydro-generator unit in a full load rejection are studied. owever, in the aforementioned published research works, the effect of hydraulic turbine characteristics and the elasticity of conduit walls on the transient process are neglected . In addition, a whole nonlinear dynamical model that can simulate each transient process of the plant isn’t developed in predecessors’ research works. In china, some large-scale hydropower stations often use the complex arrangement nowadays, moreover, the hydraulic conduits are getting longer, and its nonlinearity is very obvious. Therefore, it is very important and necessary to develop a whole nonlinear dynamical model for the complex hydropower system. II.M ATHEMATICAL M ODELS For developing the whole nonlinear mathematical model, the hydropower plant system is decomposed into decoupled dynamical modules as illustrated in Fig. 1, and a mathematical model for each module is developed. 978-1-4244-2487-0/09/$25.00 ?2009 IEEE
(完整版)系统动力学模型案例分析
系统动力学模型介绍 1.系统动力学的思想、方法 系统动力学对实际系统的构模和模拟是从系统的结构和功能两方面同时进行的。系统的结构是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能是指系统中各单元本身及各单元之间相互作用的秩序、结构和功能,分别表征了系统的组织和系统的行为,它们是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系和相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识和理解程度,其中也包含着大量的实际工作经验,是属定性方面的信息。因此,系统动力学对系统的结构和功能同时模拟的方法,实质上就是充分利用了实际系统定性和定量两方面的信息,并将它们有机地融合在一起,合理有效地构造出能较好地反映实际系统的模型。 2.建模原理与步骤
(1)建模原理 用系统动力学方法进行建模最根本的指导思想就是系统动力学的系统观和方法论。系统动力学认为系统具有整体性、相关性、等级性和相似性。系统内部的反馈结构和机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就是针对实际应用情况,从变化和发展的角度去解决系统问题。系统动力学构模和模拟的一个最主要的特点,就是实现结构和功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只是实际系统某些本质特征的简化和代表,而不是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量和确定系统边界。系统动力学模型的一致性和有效性的检验,有一整套定性、定量的方法,如结构和参数的灵敏度分析,极端条件下的模拟试验和统计方法检验等等,但评价一个模型优劣程度的最终标准是客观实践,而实践的检验是长期的,不是一二次就可以完成的。因此,一个即使是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化和新的目标。 (2)建模步骤 系统动力学构模过程是一个认识问题和解决问题的过程,根据人们对客观事物认识的规律,这是一个波浪式前进、螺旋式上升的过程,因此它必须是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验和模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都是交叉、反复进行的。 第一步系统分析的主要任务是明确系统问题,广泛收集解决系统问题的有关数据、资料和信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量和信息反馈机制。 第三步模型建立是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验是借助于计算机对模型进行模拟试验和调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用是在已经建立起来的模型上对系统问题进行定量的分析研究和做各种政策实验。 3.建模工具 系统动力学软件VENSIM PLE软件 4.建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系是用因果链来连接的。因果链是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。
第八章 结构的动力学模型修正
第八章结构的动力学模型修正 §8.1 概述 随着科学技术的进步,人们对工程结构设计的要求越来越高,因此在进行结构静、动力分析时,要求反映结构力学特征的模型正确可靠,就成为顺理成章的事,结构建模问题因而显得越来越重要。对结构振动分析而言,一个良好的数学模型是保证固有特性和振动响应计算、载荷预计、稳定性分析等得到可靠结果的前提。 上一世纪中期发展起来的有限元素法,为结构动力学建模提供了一个有力的手段。但由于各种原因,根据结构的力学模型用有限元素法建立的数学模型,常常不能准确反映实际结构的动力学特征。虽然在后来随着振动测试技术、信号处理技术的发展,使得以参数识别技术为基础的试验模态方法获得了大的发展,但由于参数识别也是以参数模型存在为前提条件,如果参数模型本身不能反映结构的本质与特征,则再好的数学识别技术也不能提高结构模型的精度。而且由参数识别得到的模态数据,往往远少于建模的需要。结构的动力学建模仍然有许多需要解决的问题。 要得到一个与实际结构动力学特性符合较好的模型,可以从两个途径来解决这个问题:一个途径是用理论分析(如有限元素法)建立模型,再用实测数据进行模型修正,称为结构动态修改或动力学模型修正;另一个途径是仅用测试数据,以参数模型为依据求得物理坐标下表征结构动态特性的质量、刚度、阻尼矩阵,即所谓物理参数识别问题。 因此,结构动力学模型修正的工程含义可以从两方面来阐述: (1)计算模型的动力学模型修正。对于实际结构运用有限元法建立的数学模型,由于它不能准确反映实际结构的动态特性,需用实测数据进行修正,以获得能用于计算的数学模型。 (2)结构的动力学修改。 结构动力学修改的正问题是指:对已有结构做了局部修改后,在原结构模态参数已知的情况下,用快速简易的方法获得改动后结构的模态参数。即所谓结构重分析问题。 结构动力学修正的反问题是指:已知的原结构模态参数不符合要求,在
考虑不确定性的结构动力学模型修正方法研究
考虑不确定性的结构动力学模型修正方法研究模型修正技术在提高仿真模型预测精度方面发挥着重要作用。传统的模型修正技术均是在确定性基础上展开的,然而在实际工程问题当中,不确定性因素是 普遍存在的。 在综合考虑各种不确定性的基础上,对模型展开不确定性修正所得到的结果将对结构设计更加具有指导意义。本文考虑了模型修正问题中常见的参数不确定性及模型形式不确定性,对复杂模型的修正方法做出以下相关研究:1.以非对称 H型梁结构为研究对象,研究了基于摄动法的随机和区间不确定性修正方法在复 杂模型中的应用。 提出了一种适用于复杂模型的不确定性修正框架,并取得了较好的修正效果。研究表明,基于摄动法的随机和区间不确定性修正方法都可用于复杂结构动力学问题;基于摄动法的修正精度依赖于大量的试验样本,而区间分析法则更加适用 于小样本的情形。 2.基于门式框架螺栓连接结构,考虑由于模型简化而引起的模型形式不确定性,同时考虑了模态试验测量数据的不确定性,提出了基于模型偏差的不确定性 修正方法。该方法以参数偏差来处理模型形式的不确定性。 研究表明,基于模型偏差的不确定性修正方法可以减小模型形式不确定性, 修正后的模型与模态试验测量数据吻合度较高。3.将分数阶微分项引入到多自由度系统振动方程中,实现对系统中模型形式不确定性的量化,并以有阻尼的二自 由度弹簧振子为对象进行修正研究。 文中选取分数阶微分项的系数与阶数为待修正系数,对系统的频响函数进行修正,并取得了良好的修正结果。此修正方法能有效地将模型参数与模型形式不
确定性进行分离并可以减小模型形式不确定性,因而具有重要的研究价值与应用前景。 4.基于C/SiC复合材料加筋壁板,对热结构的不确定性修正问题进行研究。考虑到基于摄动法的不确定性模型修正方法对多场的热结构不确定性修正问题收敛性较差,本文提出一种基于神经网络参数识别的不确定性修正方法,此方法可以避免灵敏度求解。 研究表明,基于神经网络的不确定性模型修正方法可以用于C/SiC复合材料加筋壁板热结构动力学的多场问题中。
吸附热力学及动力学的研究
吸附热力学及动力学的研究 摘要: 杂乱无章的实验数据, 不经过数学处理, 得不到能够描述它们的模型,其本身无论在科学理论上,还是在应用技术上都没有太大的实际意义。本文综述了近些年来在液固吸附理论研究领域对吸附等温线,吸附热力学及吸附动力学的研究进展。论述5 种类型吸附等温线,总结了热力学中△H 、△G 、△S 的几种求算方法,以及5种吸附动力学的模型,从而,为吸附实验数据的处理和模型优选,,提供依据。 关键字:吸附 等温曲线 热力学 动力学 1吸附等温曲线 吸附等温曲线是指在一定温度下溶质分子在两相界面上进行的吸附过程达到平衡时它们在两相中浓度之间的关系曲线。在一定温度下, 分离物质在液相和固相中的浓度关系可用吸附方程式来表示。作为吸附现象方面的特性有吸附量、吸附强度、吸附状态等, 而宏观地总括这些特性的是吸附等温线.[1] 1.1Langmuir 型分子吸附模型 Langmuir 吸附模型是应用最为广泛的分子吸附模型,Langmuir 型分子吸附模型[2]就是在Langmuir 吸附模型的基础上,研究者就Langmuir 吸附模型的局限性进行了改进、发展,形成了一系列的分子吸附模型。 1. 1.1 Langmuir 分子吸附模型 Langmuir 分子吸附模型是根据分子间力随距离的增加而迅速下降的事实,提出气体分子只有碰撞固体表面与固体分子接触时才有可能被吸附,即气体分子与表面相接触是吸附的先决条件。并做如下假定: ①气体只能在固体表面上呈单分子层吸附; ②固体表面的吸附作用是均匀的; ③被吸附分子之间无相互作用。所以Langnuir 等温吸附方程[3 ] c K c q q d m +≡ 或c K c K q q b b m +≡ 1 (1) 其中,qm 为饱和吸附容量,Kd 为吸附平衡的解离常数,Kb 为结合常数( = 1/ Kd) 。 Langnuir 分子吸附模型对于当固体表面的吸附作用相当均匀,且吸附限于单分子层时,能够较好的代表试验结果。但由于它的假定是不够严格的,具有相当的
系统动力学模型部分集
第10 章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1 节系统动力学概述 1.1 概念系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室” ; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算 机仿真语言DYNAMIC勺支持,如:PD PLUS VENSIM等的支持; 5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计
算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 1.2 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特(JAY.W.FORRESTERI出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等著作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980 年,后来,陆续做了大量的工作,主要表现如下: 1 )人才培养 自从1980年以来,我国非常重视系统动力学人才的培养,主要采用“走出去,请进来”的办法。请进来就是请国外系统动力学专家来华讲学,走出去就是派留学生,如:首批派出去的复旦大学管理学院的王其藩教授等,另外,还多次举办了全国性的讲习班。 2 )编译编写专著
系统动力学模型
1.1 海洋资源可持续开发研究综述 海洋可持续发展包括三层含义,即海洋经济的持续性、海洋生态的持续性和社会的持续性,海洋的可持续发展以保证海洋经济发展和资源永续利用为目的,实现海洋经济发展与经济环境相协调,经济、社会、生态效益相统。运用海洋可持续发展理论和海域承载力理论研究海洋资源开发的可持续性,从我国的海洋产业入手,分析我国海洋资源开发利用的状况,从海洋产业结构和产业布局、海洋管理和海洋开发技术等方面总结我国海洋开发的问题,并针对这些问题,提出切实可行的实现海洋可持续发展的途径和措施。国外学者对海洋资源的发展和研究进行研究,建立相应的模型,认为技术在海洋资源发展过程中起到极其重要的作用。国内学者则以具体省份为例研究海洋资源可持续发展,对辽宁省所拥有的海洋资源进行概述后,分析了辽宁海洋资源开发与海洋生态环境保护之间的关系,提出开展海域资源价值折损评估,采用政策调控和市场机制保护海洋生态环境。利用我国重要海洋产业数据,分析我国海洋资源开发利用的状况,并从海洋产业结构和布局及管理等角度总结海洋资源开发存在的问题,提出实现海洋资源可持续发展的途径。学者从海洋资源与环境保护角度分析,研究开发海洋的过程中,存在着海洋环境污染、海洋渔业资源衰退等问题。 1.2 系统动力学模型研究综述 到20 世纪70 年代初系统动力学被用来解决很多领域的问题,成为比较成熟的学科,系统动力学到20 世纪70 年代初所取得的成就使人们相信它是研究和处理诸如人口、自然资源、生态环境、经济和社会等相互连带的复杂系统问题的有效工具。基于市场均衡论和信用风险理论,完善运用于分析代际消费计划的系统动力学机制模型,并提出可替换选择。国内学者将系统动力学运用于研究资源与
吸附动力学和热力学各模型公式及特点
分配系数 K d = (C 0?C e )V e 吸附量 Q t =C 0?C t m ×V Langmiur Q e =Q m K L C e L e C e Q e =1Q m K L +C e Q m KL 是个常数与吸附剂结合位点的亲和力有关,该模型只对均匀表面有效 Freundlich Q e =K F C e 1/n ln Q e =ln K F +1n ln C e Ce 反应达到平衡时溶液中残留溶质的浓度 KF 和n 是Freundlich 常数,其中KF 与吸附剂的吸附亲和力大小有关,n 指示吸附过程的支持力。1/n 越小吸附性能越好一般认为其在0.1~0.5时,吸附比较容易;大于2时,难以吸附。 应用最普遍,但是它适用于高度不均匀表面,而且仅对限制浓度范围(低浓度)的吸附数据有效 一级动力学1(1)k t t e q q e -=- Q t =Q e (1?e ?K 1t ) 线性ln Q e ?Q t =ln Q e ?K 1t 二级动力学2221e t e k q t q k q t =+ Q t =K 2Q e 2t 1+K 2Q e t 线性t Q t =1K 2Q e 2+t Q e 初始吸附速度V 0=K 2Q e 2 Elovich 动力学模型 Q t =a +b ln t Webber-Morris 动力学模型 Q t =K ip t 1/2+c Boyd kinetic plot Q t e =1?6×exp ?K B t 6 令F=Q t /Q e,
K B t=-0.498-ln(1-F) 准一级模型基于假定吸附受扩散步骤控制; 准二级动力学模型假设吸附速率由吸附剂表面未被占有的吸附空位数目的平方值决定,吸附过程受化学吸附机理的控制,这种化学吸附涉及到吸附剂与吸附质之间的电子共用或电子转移; Webber-Morris动力学模型 粒子内扩散模型中,qt与t1/2进行线性拟合,如果直线通过原点,说明颗粒内扩散是控制吸附过程的限速步骤;如果不通过原点,吸附过程受其它吸附阶段的共同控制;该模型能够描述大多数吸附过程,但是,由于吸附初期和末期物质传递的差异,试验结果往往不能完全符合拟合直线通过原点的理想情况。粒子内扩散模型最适合描述物质在颗粒内部扩散过程的动力学,而对于颗粒表面、液体膜内扩散的过程往往不适合 Elovich方程为一经验式,描述的是包括一系列反应机制的过程,如溶质在溶液体相或界面处的扩散、表面的活化与去活化作用等,它非常适用于反应过程中活化能变化较大的过程,如土壤和沉积物界面上的过程。此外,Elovich方程还能够揭示其他动力学方程所忽视的数据的不规则性。 Elovich和双常数模型适合于复非均相的扩散过程。 Langmuir模型假定吸附剂表面均匀,吸附质之间没有相互作用,吸附是单层吸附,即吸附只发生在吸附剂的外表面。Qm 为饱和吸附量,表示单位吸附剂表面,全部铺满单分子层吸附剂时的吸附量;该模型的假设对实验条件的变化比较敏感,一旦条件发生变化,模型参数则要作相应的改变,因此该模型只能适用于单分子层化学吸附的情况。Langmuir 等温吸附模型作为第一个对吸附机理做了生动形象描述的模型,为以后其他吸附模型的建立起到了奠基作用。 Freundlich吸附方程既可以应用于单层吸附,也可以应用于不均匀表面的吸附情况。Freundlich吸附方程作为一个不均匀表面的经验吸附等温式,既能很好的描述不均匀表面的吸附机理,更适用于低浓度的吸附情况,它能够在更广的浓度范围内很好地解释实验结果。但是,Freundlich 吸附方程的缺点则是不能得出一个最大吸附量,无法估算在参数的浓度范围以外的吸附作用。 由于Freundlich 等温吸附方程受低浓度的限制,而Langmuir 等温吸附方程则受高浓度的限制。Redlich–Peterson 等温吸附方程则是综合Freundlich 等温吸附方程和Langmuir 等温吸附方程而提出的较合理的经验方程。A 是一个与吸附量有关的常数,B 也是一个与吸
系统动力学模型
具体思路如下: 1.系统动力学的思想、方法 系统动力学对实际系统的构模和模拟是从系统的结构和功能两方面同时进行的。系统的结构是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能是指系统中各单元本身及各单元之间相互作用的秩序、结构和功能,分别表征了系统的组织和系统的行为,它们是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系和相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识和理解程度,其中也包含着大量的实际工作经验,是属定性方面的信息。因此,系统动力学对系统的结构和功能同时模拟的方法,实质上就是充分利用了实际系统定性和定量两方面的信息,并将它们有机地融合在一起,从而合理而又有效地构造出能较好地反映实际系统的模型。 2.建模原理与步骤 (1)建模原理 用系统动力学方法进行建模最根本的指导思想就是系统动力学的系统观和
方法论。系统动力学认为系统具有整体性、相关性、等级性和相似性。系统内部的反馈结构和机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就是针对实际应用情况,从变化和发展的角度去解决系统问题。系统动力学构模和模拟的一个最主要的特点,就是实现结构和功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只是实际系统某些本质特征的简化和代表,而不是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量和确定系统边界。系统动力学模型的一致性和有效性的检验,有一整套定性、定量的方法,如结构和参数的灵敏度分析,极端条件下的模拟试验和统计方法检验等等,但评价一个模型优劣程度的最终标准是客观实践,而实践的检验是长期的,不是一二次就可以完成的。因此,一个即使是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化和新的目标。 (2)建模步骤 系统动力学构模过程是一个认识问题和解决问题的过程,根据人们对客观事物认识的规律,这是一个波浪式前进、螺旋式上升的过程,因此它必须是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验和模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都是交叉、反复进行的。 第一步系统分析的主要任务是明确系统问题,广泛收集解决系统问题的有关数据、资料和信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量和信息反馈机制。 第三步模型建立是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验是借助于计算机对模型进行模拟试验和调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用是在已经建立起来的模型上对系统问题进行定量的分析研究和做各种政策实验。 3.建模工具 系统动力学软件VENSIM PLE软件 4.建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系是用因果链来连接的。因果链是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。 a.正向因果链 A→+B:表示原因A 的变化(增或减)引起结果B 在同一方向上发生变化(增或减)。 b.负向因果链A→-B:表示原因A 的变化(增或减)引起结果B 在相反方向上发生变化(减或增)。 如图