哈工大 数学实验 大作业
数学实验大作业——抽象群与应用“RSA加密系统”
合作人:郭元镇尹庆宇杨瑞飞
综述
1)RSA 加密算法的历史
RSA公钥加密算法是1977年由Ron Rivest、Adi Shamirh和LenAdleman在(美国麻省理工学院)开发的。RSA取名来自开发他们三者的名字。RSA是目前最有影响力的公钥加密算法,它能够抵抗到目前为止已知的所有密码攻击,已被ISO推荐为公钥数据加密标准。RSA算法基于一个十分简单的数论事实:将两个大素数相乘十分容易,但那时想要对其乘积进行因式分解却极其困难,因此可以将乘积公开作为加密密钥。这种算法1978年就出现了,它是第一个既能用于数据加密也能用于数字签名的算法。它易于理解和操作,也很流行。早在1973年,英国国家通信总局的数学家Clifford Cocks就发现了类似的算法。但是他的发现被列为绝密,直到1998年才公诸于世。
RSA是被研究得最广泛的公钥算法,从提出到现在已近二十年,经历了各种攻击的考验,逐渐为人们接受,普遍认为是目前最优秀的公钥方案之一。RSA的安全性依赖于大数的因子分解,但并没有从理论上证明破译RSA的难度与大数分解难度等价。即RSA的重大缺陷是无法从理论上把握它的保密性能如何,而且密码学界多数人士倾向于因子分解不是NPC问题。
2)RSA 加密算法的原理
RSA算法是一种非对称密码算法,所谓非对称,就是指该算法需要一对密钥,使用其中一个加密,则需要用另一个才能解密。
RSA的算法涉及三个参数,n、e1、e2。
其中,n是两个大质数p、q的积,n的二进制表示时所占用的位数,就是所谓的密钥长度。
e1和e2是一对相关的值,e1可以任意取,但要求e1与(p-1)*(q-1)互质;再选择e2,要求(e2*e1)mod((p-1)*(q-1))=1。
(n及e1),(n及e2)就是密钥对。
RSA加解密的算法完全相同,设A为明文,B为密文,则:A=B^e1 mod n;B=A^e2 mod n;
e1和e2可以互换使用,即:
A=B^e2 mod n;B=A^e1 mod n;
3)RSA 加密算法的缺点
1.产生密钥很麻烦,受到素数产生技术的限制,因而难以做到一次一密。
2.安全性, RSA的安全性依赖于大数的因子分解,但并没有从理论上证明破译RSA的难度与大数分解难度等价,而且密码学界多数人士倾向于因子分解不是NPC问题。目前,人们已能分解140多个十进制位的大素数,这就要求使用更长的密钥,速度更慢;另外,目前人们正在积极寻找攻击RSA的方法,如选择密文攻击,一般攻击者是将某一信息作一下伪装(Blind),让拥有私钥的实体签署。然后,经过计算就可得到它所想要的信息。实际上,攻击利用的都是同一个弱点,即存在这样一个事实:乘幂保留了输入的乘法结构:
( XM )d = Xd *Md mod n
前面已经提到,这个固有的问题来自于公钥密码系统的最有用的特征--每个人都能使用公钥。但从算法上无法解决这一问题,主要措施有两条:一条是采用好的公钥协议,保证工作过程中实体不对其他实体任意产生的信息解密,不对自己一无所知的信息签名;另一条是决不对陌生人送来的随机文档签名,签名时首先使用One-Way Hash Function对文档作HASH处理,或同时使用不同的签名算法。除了利用公共模数,人们还尝试一些利用解密指数或φ(n)等等攻击.
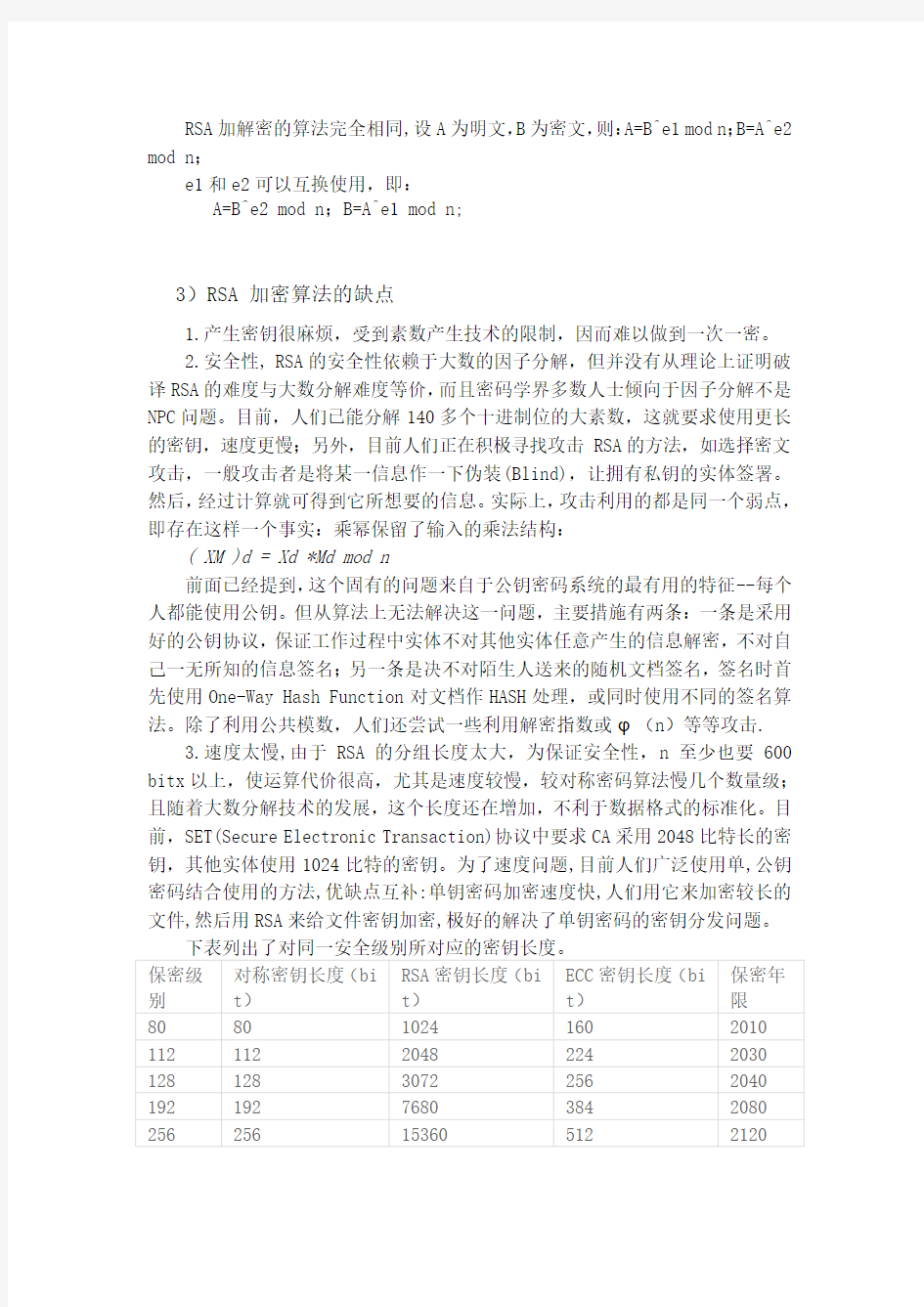
3.速度太慢,由于RSA 的分组长度太大,为保证安全性,n 至少也要 600 bitx以上,使运算代价很高,尤其是速度较慢,较对称密码算法慢几个数量级;且随着大数分解技术的发展,这个长度还在增加,不利于数据格式的标准化。目前,SET(Secure Electronic Transaction)协议中要求CA采用2048比特长的密钥,其他实体使用1024比特的密钥。为了速度问题,目前人们广泛使用单,公钥密码结合使用的方法,优缺点互补:单钥密码加密速度快,人们用它来加密较长的文件,然后用RSA来给文件密钥加密,极好的解决了单钥密码的密钥分发问题。
下表列出了对同一安全级别所对应的密钥长度。
保密级别对称密钥长度(bi
t)
RSA密钥长度(bi
t)
ECC密钥长度(bi
t)
保密年
限
80 80 1024 160 2010 112 112 2048 224 2030 128 128 3072 256 2040 192 192 7680 384 2080 256 256 15360 512 2120
4)针对RSA 加密算法的几种攻击方式
针对RSA最流行的攻击一般是基于大数因数分解。1999年,RSA-155(512 bits)被成功分解,花了五个月时间(约8000 MIPS 年)和224 CPU hours 在一台有3.2G中央内存的Cray C916计算机上完成。
2002年,RSA-158也被成功因数分解。
1.RSA的选择密文攻击
RSA在选择密文攻击面前很脆弱。一般攻击者是将某一信息作一下伪装( Blind),让拥有私钥的实体签署。然后,经过计算就可得到它所想要的信息。实际上,攻击利用的都是同一个弱点,即存在这样一个事实:乘幂保留了输入的乘法结构:
( XM )^d = X^d *M^d mod n
这个固有的问题来自于公钥密码系统的最有用的特征--每个人都能使用公钥。但从算法上无法解决这一问题,主要措施有两条:一条是采用好的公钥协议,保证工作过程中实体不对其他实体任意产生的信息解密,不对自己一无所知的信息签名;另一条是决不对陌生人送来的随机文档签名,签名时首先使用One-Way HashFunction 对文档作HASH处理,或同时使用不同的签名算法。
2.RSA的公共模数攻击
若系统中共有一个模数,只是不同的人拥有不同的e和d,系统将是危险的。最普遍的情况是同一信息用不同的公钥加密,这些公钥共模而且互质,那么该信息无需私钥就可得到恢复。设P为信息明文,两个加密密钥为e1和e2,公共模数是n,则:
C1 = P^e1 mod n
C2 = P^e2 mod n
密码分析者知道n、e1、e2、C1和C2,就能得到P。
因为e1和e2互质,故用Euclidean算法能找到r和s,满足:
r * e1 + s * e2 = 1
假设r为负数,需再用Euclidean算法计算C1^(-1),则
( C1^(-1) )^(-r) * C2^s = P mod n
另外,还有其它几种利用公共模数攻击的方法。总之,如果知道给定模数的一对e和d,一是有利于攻击者分解模数,一是有利于攻击者计算出其它成对的e’和d’,而无需分解模数。解决办法只有一个,那就是不要共享模数n。
RSA的小指数攻击。有一种提高 RSA速度的建议是使公钥e取较小的值,这样会使加密变得易于实现,速度有所提高。但这样做是不安全的,对付办法就是e和d都取较大的值。
5)本次实验中用到的4种算法
1.平方-乘算法
在RSA算法中,往往要计算ma mod r的值,由于ma的值可能会很大而产生溢出从而导致错误。
平方-乘算法:将a转换为二进制数b,用bi表示b的第i位值,L为b的二进制位数,则:
(0)令c=1,i=L-1
(1)计算c=c*c%r
(2)若bi=1,则计算c=c*m%r,否则什么也不做
(3)i=i-1
(4)重复步骤1-3,直至i=0为止,此时c的值即为所求。
2.Rabin-Miller算法:
数论学家利用费马小定理研究出了多种素数测试方法,目前最快的算法是拉宾米勒测试算法,(现在不是最快,印度的一名老师和他的两个本科生的算法是最快的:印度理工学院计算机科学与工程学系的科学家马宁德拉·阿格拉瓦和他的两位在校本科生尼拉叶·卡雅尔和尼汀·萨克斯特纳)其过程如下:
(1)计算奇数M,使得N=(2**r)*M+1
(2)选择随机数A (3)对于任意i (4)或者,若A**M MOD N = 1,则N通过随机数A的测试 (5)让A取不同的值对N进行5次测试,若全部通过则判定N为素数 若N 通过一次测试,则N 不是素数的概率为 25%,若N 通过t 次测试,则N 不是素数的概率为(1/4)的n次幂。事实上取t 为5 时,N 不是素数的概率为 1/128,N 为素数的概率已经大于99.99%。 3.扩展欧几里德算法 欧几里德算法又称辗转相除法,用于计算两个整数a,b的最大公约数。其计算原理依赖于下面的定理: 定理:gcd(a,b) = gcd(b,a mod b) 设两数为a、b(b<a),用gcd(a,b)表示a,b的最大公约数,r=a mod b 为a除以b以后的余数,辗转相除法即是要证明gcd(a,b)=gcd(b,r)。 第一步:令c=gcd(a,b),则设a=mc,b=nc 第二部:根据前提可知r =a-kb=mc-knc=(m-kn)c 第三部:根据第二步结果可知c也是r的因数 第四步:可以断定m-kn与n互素(否则,可设m-kn=xd,n=yd,(d>1),则 m=kn+xd=kyd+xd=(ky+x)d,则a=mc=(ky+x)dc,b=nc=ycd,故a与b最大公约数成为cd,而非c) 从而可知gcd(b,r)=c,继而gcd(a,b)=gcd(b,r)。 扩展欧几里德算法是用来在已知a, b求解一组p,q使得p * a+q * b = Gcd(a, b) (解一定存在,根据数论中的相关定理)。扩展欧几里德常用在求解模线性方程及方程组中。 4. 大数快速求模算法 先承认两个公式: ab mod c=((a mod c)(b mod c)) mod c (a+b) mod c=(a mod c+b mod c) mod c 然后递推,先算1 mod c,然后10 mod c ,100 mod c。。。用数组存一下,递推方法是10^n mod c=((10^(n-1) mod c)*10) mod c 再加,让k=0, for a:=1 to l do k:=(k+num[a]*exp10[a]) mod c 这样最后k就是结果。 程序运行实例及结果分析 初始运行界面 自动生成密钥 RSA加密 RSA解密 手动输入密钥 输入密钥不符合要求时弹出警告窗口 关于 帮助 对实验结果的看法和意见: 实验结果并不很让人满意,只能完成3000-9000之内素数的输入运算过程,对于多位素数的运算进行了尝试但是仍有很多BUG,所以只暂时保留了小数量级的RSA加解密过程展示。但是基本功能已经完成,只要找到一种适合大素数的运算算法,便可顺利进行大数量级素数的RSA加解密。 参考文献 1)陈华,蔡光兴《基于Matlab/GUI的RSA密码演示系统》计算机与现代化2009(7) 2)刘卫国《Matlab程序设计与应用》 2006 3)闫洪亮.牛军涛《实现RSA算法应注意的问题》计算机应用与软件 2008(5) 4)胡卫群《Euclidean算法》南京农专学报 1996(4) 5)雒海涛《Matlab GUI教程》 2011 合作分工 郭元镇: GUI界面编程 尹庆宇:资料查找和题目分析研究 杨瑞飞:算法设计 时间:2013春季学期班级:1108101学号:1110810104姓名:陈文华 11.驱动七段共阴极LED数码管的译码电路 一、设计要求: (1)输入变量A、B、C来自计数器,按顺序000~111计数。当ABC=000时,数码管全灭;以后要求依次显示H、O、P、E、F、U、L七个字母。 (2)输入变量A、B、C来自计数器,按顺序000~111计数。当ABC=000时,数码管全灭;以后要求依次显示1、1、0、8、1、0、1(或1108102、103、104)七个数字(根据自己的班级号)。 二、设计方案: 1.设计原理及设计方案选择 (1)a.本题目要求来自计数器的变量A、B、C,所以需要一计数器,使其八进制计数。A、B、C输出还不能直接接数码显示器,需要经过一译码器,将具有特定含义的二进制代码译成对应的输出信号,然后根据题目要求对译码器的输出进行逻辑运算,接到数码管显示。 b.根据学过的知识,对于计数模块,异步集成计数器74LS90和同步集成计数器74LS161都能实现要求,本设计采用的是异步集成计数器74LS90。通过接线方式的处理就可以实现八进制计数。 c.对于译码模块,采用的是3线—8线译码器74LS138。将计数器的ABC(D在本次设计中不需要接到输入)输出接到译码器的输入,经过译码器译成对应的输出信号,这样就可以对能实现要求的信号进行逻辑运算了。 为了实现设计要求,需根据要显示的内容和输出信号来进行逻辑运算,如下: 译码输出: C B A Y0Y1Y2Y3Y4Y5Y6Y7 00001111111 00110111111 010******** 01111101111 10011110111 10111111011 11011111101 11111111110 要显示的内容: a.显示H、O、P、E、F、U、L七个字母: a b c d e f g显示字形 0000000数码管全灭 0110111H 1111110O 1100111P H a r b i n I n s t i t u t e o f T e c h n o l o g y 单片机原理与应用 实验报告 学生姓名: 学号: 班级: 专业: 任课教师: 所在单位: 2013年5月 软件实验 在软件实验部分,通过实验程序的调试,使学生熟悉MCS-51的指令系统,了解程序设计过程,掌握汇编语言设计方法以及如何使用实验系统提供的调试手段来排除程序错误。 实验一清零程序 一、实验目的 掌握汇编语言设计和调试方法,熟悉键盘操作。 二、实验内容 把2000~20FFh的内容清零。 三、程序框图 四、实验过程 实验中利用MOVX语句,将外部存储器指定内容清零。利用数据指针DPTR完成数据传送工作。程序采用用循环结构完成,R0移动单元的个数,可用CJNE比较语句判断循环是否结束。 五、实验结果及分析 清零前清零后 【问题回答】清零前2000H~20FFH中为内存里的随机数,清零后全变为0。 六、实验源程序 AJMP MAIN ORG 0640H MAIN: MOV R0, #00H MOV DPL, #00H MOV DPH, #20H LOOP: MOV A, #00H MOVX @DPTR, A INC DPTR INC R0 CJNE R0, #0FFH, LOOP MOVX @DPTR, A END 实验二拆字程序 一、实验目的 掌握汇编语言设计和调试方法。 二、实验内容 把2000h的内容拆开,高位送2001h低位,低位送2002h低位,2001h、2002h高位清零,一般本程序用于把数据送显示缓冲区时用。 三、程序框图 四、实验过程 将寄存器中内容送入2000H,分别将高低四位移到低位,将高四位置零然后移入2001H 和2002H中。利用MOVX语句、DPTR指针可实现数据的传送,利用高低四位交换语句SWAP和与语句ANL可进行对高低位的清零。 习 题 一 1.写出下列随机试验的样本空间及下列事件中的样本点: (1)掷一颗骰子,记录出现的点数. A =‘出现奇数点’; (2)将一颗骰子掷两次,记录出现点数. A =‘两次点数之和为10’,B =‘第一次的点数,比第二次的点数大2’; (3)一个口袋中有5只外形完全相同的球,编号分别为1,2,3,4,5;从中同时取出3只球,观察其结果,A =‘球的最小号码为1’; (4)将,a b 两个球,随机地放入到甲、乙、丙三个盒子中去,观察放球情况,A =‘甲盒中至少有一球’; (5)记录在一段时间内,通过某桥的汽车流量,A =‘通过汽车不足5台’,B =‘通过的汽车不少于3台’。 解 (1)123456{,,,,,}S e e e e e e =其中i e =‘出现i 点’1,2,,6i =, 135{,,}A e e e =。 (2){(1,1),(1,2),(1,3),(1,4),(1,5),(1,6)S = (2,1),(2,2),(2,3),(2,4),(2,5),(2,6) (3,1),(3,2),(3,3),(3,4),(3,5),(3,6) (4,1),(4,2),(4,3),(4,4),(4,5),(4,6) (5,1),(5,2),(5,3),(5,4),(5,5),(5,6) (6,1),(6,2),(6,3),(6,4),(6,5),(6,6)}; {(4,6),(5,5),(6,4)}A =; {(3,1),(4,2),(5,3),(6,4)}B =。 (3){(1,2,3),(2,3,4),(3,4,5),(1,3,4),(1,4,5),(1,2,4),(1,2,5)S = (2,3,5),(2,4,5),(1 {(1,2,3),(1,2,4),(1,2,5),(1,3,4),(1,3,5),(1,4,5)}A = (4){(,,),(,,),(,,),(,,),(,,),(,,),S ab ab ab a b a b b a =--------- (,,),(,,,),(,,)}b a a b b a ---,其中‘-’表示空盒; {(,,),(,,),(,,),(,,),(,,)}A ab a b a b b a b a =------。 (5){0,1,2,},{0,1,2,3,4},{3,4,}S A B ===。 2.设,,A B C 是随机试验E 的三个事件,试用,,A B C 表示下列事件: (1)仅A 发生; (2),,A B C 中至少有两个发生; 研究生自动控制专业实验 地点:A区主楼518房间 姓名:实验日期:年月日斑号:学号:机组编号: 同组人:成绩:教师签字:磁悬浮小球系统 实验报告 主编:钱玉恒,杨亚非 哈工大航天学院控制科学实验室 磁悬浮小球控制系统实验报告 一、实验内容 1、熟悉磁悬浮球控制系统的结构和原理; 2、了解磁悬浮物理模型建模与控制器设计; 3、掌握根轨迹控制实验设计与仿真; 4、掌握频率响应控制实验与仿真; 5、掌握PID控制器设计实验与仿真; 6、实验PID控制器的实物系统调试; 二、实验设备 1、磁悬浮球控制系统一套 磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。 磁悬浮球控制系统计算机部分 磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等; 三、实验步骤 1、系统实验的线路连接 磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。 2、启动实验装置 通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。 系统实验的参数调试 根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID 等),直到获得较理想参数为止。 四、实验要求 1、学生上机前要求 学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。 学生必须交实验报告后才能上机调试。 2、学生上机要求 上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。 五、系统建模思考题 1、系统模型线性化处理是否合理,写出推理过程? 合理,推理过程: 由级数理论,将非线性函数展开为泰勒级数。由此证明,在平衡点)x ,(i 00对 系统进行线性化处理是可行的。 对式2x i K x i F )(),(=作泰勒级数展开,省略高阶项可得: )x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= )x -(x K )i -(i K )x ,F(i x)F(i,0x 0i 00++= 平衡点小球电磁力和重力平衡,有 (,)+=F i x mg 0 |,δδ===00 i 00 i i x x F(i,x) F(i ,x )i ;|,δδ===00x 00i i x x F(i,x)F (i ,x )x 对2 i F(i,x )K()x =求偏导数得: 2012秋季学期《电工技术I》大作业 (1108101~104) 班级: 1108103 学号: 姓名: 成绩: 继电接触器和可编程控制器综合设计题目 有一运料小车在A、B两地来回运行,其中A地为装料处,设有限位开关ST1,每次装料时间为30s;B地为卸料处,设有限位开关ST2,每次卸料时间为20s。 小车运行控制分手控操作和自控操作。 控制要求: (1)手动操作:能手动控制小车向A地运行或向B地运行。 (2)自控操作:当小车启动时,有一物料检测传感器检测小车料箱是否有料,如果有料,该传感器的常开触点闭合,小车自动向B地运行;如果无料,该传感器的常闭触点闭合,小车自动向A地运行。小车到达B地限位开关ST2处停车20s卸料,然后自动驶向A地;小车到达A地限位开关ST1处停车30s装料,然后再自动返回B地卸料。如此循环往复。 (3)停车控制:小车在自动往返运行过程中,均可用手动开关令其停车。再次启动后,小车重复(2)中内容。 设计要求: (1)设计控制该小车运行的继电接触器控制电路(包括主电路和控制电路); (2)设计控制该小车运行的PLC控制梯形图程序并画出外部接线图(注意进行I/O分配)。 (3)写出综合设计报告。 限位开关限位开关 PLC控制梯形图如下: I/O分配如下: 1、手动操作 无论小车是否运行,只要按下SB4,KM1将会通电,其常闭触点断开,常开触点闭合,如果此前KM2处于通电状态,这个时候,KM2也将会断电,其常闭触点也会闭合。从而KM1实现自锁,并向A点运行,直至按下SB1或触到行程开关ST1。此后如果不按下SB4或SB5,小车会处于自动运行状态。 2、自动操作 如果小车中有料,则KM闭合,线圈KM0通电,则其常闭触点断开、常开触点闭合,KM2通电,并实现自锁与互锁。向B点运行。如果小车中无料,则KM 断开,线圈KM0通电,则其常闭触点断开、常开触点闭合,KM1通电,并实现自锁与互锁。向A点运行。启动时,如果小车先向A点运行,到达A点后行程开关ST1的常开触点闭合,常闭触点断开。KM1断电的同时,KT1开始计时。30S后,常开延时闭合开关ST1闭合,同时小车中因为有料而KM0通电,小车开始往B点运行,并实现自锁与互锁。到达B点后,使行程开关ST2的常闭触点断开,常开触点闭合,小车停止运行,KT2开始计时。20S后,常开延时闭合开关ST2闭合,同时小车中因为无料而K断电,小车开始往A点运行,并实现自锁与互锁。从此在A、B间往复运行,除非对其手动控制或按下SB0。 3、停车控制 按下SB0即可实现。 ·1· 习 题 一 1.写出下列随机试验的样本空间及下列事件中的样本点: (1)掷一颗骰子,记录出现的点数. A =‘出现奇数点’; (2)将一颗骰子掷两次,记录出现点数. A =‘两次点数之和为10’,B =‘第一次的点数,比第二次的点数大2’; (3)一个口袋中有5只外形完全相同的球,编号分别为1,2,3,4,5;从中同时取出3只球,观察其结果,A =‘球的最小号码为1’; (4)将,a b 两个球,随机地放入到甲、乙、丙三个盒子中去,观察放球情况,A =‘甲盒中至少有一球’; (5)记录在一段时间内,通过某桥的汽车流量,A =‘通过汽车不足5台’,B =‘通过的汽车不少于3台’。 解 (1)123456{,,,,,}S e e e e e e =其中i e =‘出现i 点’1,2,,6i = , 135{,,}A e e e =。 (2){(1,1),(1,2),(1,3),(1,4),(1,5),(1,6)S = (2,1),(2,2),(2,3),(2,4),(2,5),(2,6) (3,1),(3,2),(3,3),(3,4),(3,5),(3,6) (4,1),(4,2),(4,3),(4,4),(4,5),(4,6) (5,1),(5,2),(5,3),(5,4),(5,5),(5,6) (6,1),(6,2),(6,3),(6,4),(6,5),(6,6)}; {(4,6),(5,5),(6,4)}A =; {(3,1),(4,2),(5,3),(6,4)}B =。 (3){(1,2,3),(2,3,4),(3,4,5),(1,3,4),(1,4,5),(1,2,4),(1,2,5)S = (2,3,5),(2,4,5),(1,3,5)} {(1,2,3),(1,2,4),(1,2,5),(1,3,4),(1,3,5),(1,4,5)}A = (4){(,,),(,,),(,,),(,,),(,,),(,,),S ab ab ab a b a b b a =--------- (,,),(,,,),(,,)}b a a b b a ---,其中‘-’表示空盒; {(,,),(,,),(,,),(,,),(,,)}A ab a b a b b a b a =------。 (5){0,1,2,},{0,1,2,3,4},{3,4,}S A B === 。 2.设,,A B C 是随机试验E 的三个事件,试用,,A B C 表示下列事件: (1)仅A 发生; (2),,A B C 中至少有两个发生; 自动控制原理 大作业 (设计任务书) 姓名: 院系: 班级: 学号: 5. 参考图5 所示的系统。试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60 度,幅值裕度不小于8 分贝。利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。 + 一.人工设计过程 1.计算数据确定校正装置传递函数 为满足设计要求,这里将超前滞后装置的形式选为 ) 1)(() 1)(1()(2 12 1T s T s T s T s K s G c c ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。这样就有 )5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205 ==c K 所以 100=c K 这里我们令100=K ,1=c K ,则为校正系统开环传函) 5)(1(100 )(++= s s s s G 首先绘制未校正系统的Bode 图 由图1可知,增益已调整但尚校正的系统的相角裕度为? 23.6504-,这表明系统是不稳定的。超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为? 60。单个超前滞后装置能够轻易提供这一超前角。 一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定 1 1 sin +-= ββφm 因此选)79.64(20 ==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为 )/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为 1 1001 520 01.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。因此,如果超前滞后校正装置在2=ωrad/s 处提供-10dB 的增益,新的增益穿越频率就是所期望的增益穿越频率。从这一要求出发,可 以画一条斜率为-20dB 且穿过(2rad/s ,-10dB )的直线。这条直线与0dB 和-26dB 线的交点就确定了转角频率。因此,超前部分的转角频率被确定为s rad s rad /10/5.021==ωω和。 因此,超前校正装置的超前部分传函为 )1 1.01 2(201105.0++=++s s s s 综合校正装置的超前与之后部分的传函,可以得到校正装置的传递函数)(S G c 。 即) 1100)(11.0() 15)(12(01.02.0105.0)(++++=++++= s s s s s s s s s G c 校正后系统的开环传递函数为 计算机网络课程实验报告 实验5:利用Ethereal分析TCP、UDP、ICMP协议 继续学习Ethereal的使用; 利用Ethereal分析TCP、UDP和ICMP协议。 TCP协议采用了哪些机制保证可靠数据传输。(3分) 数据重传和数据确认应答机制 Traceroute的工作过程,用自己的话来描述,200字以内,超过酌情扣分。 (4分) 构造数据包,来检查到达一个主机时经过了哪些路由。主机发送给目的地址的数据包的TTL是从1逐个递增的,而数据包每到达一个路由器,它的TTL值就会减1,当TTL减到0时,该数据包被取消,传回一个数据包给主机,我们就能捕获这个路由器的IP地址了。如果收到"超时错",表示刚刚到达的是路由器,而如果收到的是"端口不可达" 错误,表示刚刚到达的就是目的主机,路由跟踪完成,程序结束。 阐述一下为什么应用程序开发者会选择将应用程序运行在UDP而不是TCP 之上?(3分) UDP没有拥塞控制机制,发送方可以以任何速率向下层注入数据。很多实时应用是 可以容忍一定的数据丢失的,同时又对速率有很高要求(比如在线视频播放),这时开发者会倾向选择UDP协议,避免使用TCP协议的拥塞控制机制产生的分组开销。 实验过程: 使用Ethereal分析TCP协议: (15分)得分:抓取本机与https://www.360docs.net/doc/4d11505205.html,/ethereal-labs/alice.txt通信过程中的网络数据包。根据操作思考以下问题: 客户服务器之间用于初始化TCP连接的TCP SYN报文段的序号(sequence number)是多少?在该报文段中,是用什么来标示该报文段是SYN报文段的? Seq=0 Flags中的syn位为1,ack位为0,说明是syn报文段 服务器向客户端发送的SYNACK报文段序号是多少?该报文段中,Acknowledgement字段的值是多少?https://www.360docs.net/doc/4d11505205.html,服务器是如何决定此值 的?在该报文段中,是用什么来标示该报文段是SYNACK报文段的? Seq=0 Ack=1,服务器根据客户端发送的SYN报文的Seq值加一后得到此值 Flags中的Ack和Syn位都为1,所以是SYNACK报文 电子技术课程设计一评分:数字显示电子钟 班级: 学号: 姓名: 日期:2015年月日 一、题目:数字显示电子钟 二、设计要求: 1) LED数码管显示小时、分、秒; 2)可以快速校准小时、分;秒计时可以校零; 3)最大显示为23小时59分59秒; 4)秒脉冲信号由1MHz信号经分频器产生; 三、电气原理图 上图为时钟电路总图,电路由秒时钟信号发生器、计时电路和校时电路构成。1)时钟信号发生器部分如下图所示;output端输出1Hz脉冲信号,其为上图中方波脉冲发生电路; 2)计时电路中采用两个60进制计数器分别完成秒计时和分计时;24进制计数器完成时计时;用数码管显示时间的译码结果; 3)校时电路采用开关控制秒时钟信号为校时脉冲以完成校时。 四、各功能块的原理说明 1)秒计时器及秒计时校零部分 由一个十进制计数器和一个六进制计数器串联而成为六十进制计数器。在电路设计中采用是74LS161反馈预置法来实现十进制与六进制功能。 图片底部按钮为秒计时校零按钮,按下按钮时,通过与门将LOAD 端置零实现秒计时器的置零 2)分、时计时器及校准部分 时计时器是由两片74LS161级联而成的二十四进制的计数器,分计时器是由两片74LS161级联而成的六十进制的计数器,采用的是反馈复位法。图片中两个计时器下部为时、分校准按钮,按动按钮相当于提供手动的脉冲,通过按动按钮,实现两个计数器的示数的改变,进而实现时间的校准。 3)秒时钟信号发生器 如图为秒脉冲信号发生器,由分频器6次分频1MHz信号产生秒脉冲,每次1/10分频,电路左上角为1MHz信号输入,output为1Hz信号输出 Harbin Institute of Technology 天线原理实验报告 课程名称:天线原理 班级: 姓名: 学号: 同组人: 指导教师: 实验时间: 实验成绩: 注:本报告仅供参考 哈尔滨工业大学 一、实验目的 1. 掌握喇叭天线的原理。 2. 掌握天线方向图等电参数的意义。 3. 掌握天线测试方法。 二、实验原理 1. 天线电参数 (1).发射天线电参数 a.方向图:天线的辐射电磁场在固定距离上随空间角坐标分布的图形。 b.方向性系数:在相同辐射功率,相同距离情况下,天线在该方向上的辐射功率密度Smax与无方向性天线在该方向上的辐射功率密度S0之比值。 c.有效长度:在保持该天线最大辐射场强不变的条件下,假设天线上的电流均匀分布时的等效长度。 d.天线效率:表征天线将高频电流或导波能量转换为无线电波能量的有效程度。 e.天线增益:在相同输入功率、相同距离条件下,天线在最大辐射方向上的功率密度Smax与无方向性天线在该方向上的功率密度S0之比值。 f.输入阻抗:天线输入端呈现的阻抗值。 g.极化:天线的极化是指该天线在给定空间方向上远区无线电波的极化。 h.频带宽度:天线电参数保持在规定的技术要求范围内的工作频率范围。 (2).接收天线电参数:除了上述参数以外,接收天线还有一些特有的电参数:等效面积和等效噪声温度。 a.等效面积:天线的极化与来波极化匹配,且负载与天线阻抗共轭匹配的最佳状态下,天线在该方向上所接收的功率与入射电波功率密度之比。 b.等效噪声温度:描述天线向接收机输送噪声功率的参数。 2. 喇叭天线 由逐渐张开的波导构成,是一种应用广泛的微波天线。按口径形状可分为矩形喇叭天线与圆形喇叭天线等。波导终端开口原则上可构成波导辐射器,由于口径尺寸小,产生的波束过宽;另外,波导终端尺寸的突变除产生高次模外,反射较大,与波导匹配不良。为改善这种情况,可使波导尺寸加大,以便减少反射,又可在较大口径上使波束变窄。 (1).H面扇形喇叭:若保持矩形波导窄边尺寸不变,逐渐张开宽边可得H面扇 2015年哈工大概率统计试题 一、填空题(每小题3分,共5小题,满分15分) 1.设()()0.7P A P B +=,且,A B 只发生一个的概率为0.5,则,A B 都发生的概率为 ________________ . 2.设随机变量X 的概率密度为???<≥=0 ,00e )(-x x x f x X ,,则随机变量X Y e =的概率密度为 ()Y f y = ______________ _ _ . 3.设随机变量, X Y 的相关系数为0.5,220,2EX EY EX EY ====,则 2()E X Y +=. 4.生产一个零件所需时间2(,)X N μσ ,观察25个零件的生产时间得 5.5x =秒,样本 标准差 1.73s =秒,则μ的置信度为0.95的置信区间为________________ __. 5.设随机变量, X Y 相互独立,且均服从区间[]0,3上的均匀分布,则 {max(,)1}P X Y ≤=______ . 注:可选用的部分数值:0.050.0250.025(24) 1.7109, (24) 2.0639, (25) 2.0595,t t t === .95.0645.1975.096.1=Φ=Φ)(,)( 二、选择题(每小题3分,共5小题,满分15分) 1.设()01,P B <<(|)(|)1P A B P A B +=,则 (A ),A B 互不相容.(B ),A B 互为对立事件. (C ),A B 相互独立.(D ),A B 不独立.【】 2.下列函数可作为随机变量的分布函数的是 (A )()2 1,1F x x x =-∞<<+∞+.(B ), 0() 1 0, 0 x x F x x x ?≥? =+?? 实验报告一 题目:非线性方程求解 摘要:非线性方程的解析解通常很难给出,因此线性方程的数值解法就尤为重要。本实验采用两种常见的求解方法二分法和Newton法及改进的Newton法。 前言:(目的和意义) 掌握二分法与Newton法的基本原理和应用。 数学原理: 对于一个非线性方程的数值解法很多。在此介绍两种最常见的方法:二分法和Newton法。 对于二分法,其数学实质就是说对于给定的待求解的方程f(x),其在[a,b]上连续,f(a)f(b)<0,且f(x)在[a,b]内仅有一个实根x*,取区间中点c,若,则c恰为其根,否则根据f(a)f(c)<0是否成立判断根在区间[a,c]和[c,b]中的哪一个,从而得出新区间,仍称为[a,b]。重复运行计算,直至满足精度为止。这就是二分法的计算思想。 Newton法通常预先要给出一个猜测初值x0,然后根据其迭代公式 产生逼近解x*的迭代数列{x k},这就是Newton法的思想。当x0接近x*时收敛很快,但是当x0选择不好时,可能会发散,因此初值的选取很重要。另外,若将该迭代公式改进为 其中r为要求的方程的根的重数,这就是改进的Newton法,当求解已知重数的方程的根时,在同种条件下其收敛速度要比Newton法快的多。 程序设计: 本实验采用Matlab的M文件编写。其中待求解的方程写成function的方式,如下 function y=f(x); y=-x*x-sin(x); 写成如上形式即可,下面给出主程序。 二分法源程序: clear %%%给定求解区间 b=1.5; a=0; %%%误差 R=1; k=0;%迭代次数初值 while (R>5e-6) ; c=(a+b)/2; if f12(a)*f12(c)>0; a=c; else b=c; end R=b-a;%求出误差 k=k+1; end x=c%给出解 Newton法及改进的Newton法源程序:clear %%%% 输入函数 f=input('请输入需要求解函数>>','s') %%%求解f(x)的导数 df=diff(f); DSP-F2812的最小系统设计 姓名 学号 班级 时间 一、设计目的: TMS320F2812DSP是TI公司一款用于控制的高性能、多功能、高性价比的32位定点DSP。它整合了DSP和微控制器的最佳特性,集成了事件管理器,A/D转换模块、SCI通信接口、SPI外设接口、eCAN 总线通信模块、看门狗电路、通用数字I/O口、多通道缓冲串口、外部中断接口等多个功能模块,为功能复杂的控制系统设计提供了方便,同时由于其性价比高,越来越多地被应用于数字马达控制、工业自动化、电力转换系统、医疗器械及通信设备中。 通过本课程的学习,我对DSP的各个模块有了较为深入的了解,希望可以通过对最小系统的设计,进一步加深对DSP的学习,能在实践中运用DSP,提高自己的动手实践能力。 二、设计思路 所谓最小系统就是由主控芯片加上一些电容、电阻等外围器件构成,其能够独立运行,实现最基本的功能。为了验证DSP的最基本的功能,我设计了如下单元:有源电路的设计、复位电路及JATG下载口电路的设计、外扩RAM的设计、串口电路的设计、外扩A/D模块电路的设计。 三、详细设计步骤和原理 1、电源电路的设计 TMS320F2812工作时所要求的电压分为两部分:3.3V的Flash电压和1.8V的内核电压。TMS320F2812对电源很敏感,所以在此推荐 选择电压精度较高的电源芯片TPS767D318。TPS767D318芯片输入电压为+5V,芯片起振,正常工作之后,能够产生3.3V和1.8V两种电压电压供DSP使用。如下图所示: 2、复位电路及JATG下载口电路的设计 考虑到TPS767D301芯片自身能够产生复位信号,此复位信号可以直接供DSP芯片使用,所以不用为DSP设置专门的复位芯片。 在实际设计过程中,考虑到JATG下载口的抗干扰性,在与DSP 相连接的接口均需要采用上拉设计。 《概率论与数理统计》论文题目:正态分布及其应用 学院:航天学院 专业:空间科学与技术 姓名:黄海京 学号:1131850108 正态分布及其应用 摘要:正态分布(normal distribution),是一个在数学、物理及工程等领域都非常重要的概率分布,在统计学的许多方面有着重大的影响力。正态分布有极其广泛的实际背景, 例如测量误差, 人的生理特征尺寸如身高、体重等 ,正常情况下生产的产品尺寸:直径、长度、重量高度,炮弹的弹落点的分布等, 都服从或近似服从正态分布,以及确定医学参考值范围,药品规格,用量等。可以说,正态分布是自然界和社会现象中最为常见的一种分布, 一个变量如果受到大量微小的、独立的随机因素的影响, 那么这个变量一般是一个正态随机变量。 关键词:正态分布, 一、正态分布的由来 正态分布(normal distribution)又名高斯分布(Gaussian distribution)。正态分布概念是由德国的数学家和天文学家Moivre于1733年受次提出的,但由于德国数学家Gauss率先将其应用于天文学家研究,故正态分布又叫高斯分布,高斯这项工作对后世的影响极大,他使正态分布同时有了“高斯分布”的名称,后世之所以多将最小二乘法的发明权归之于他,也是出于这一工作。 正态分布是一个在数学、物理及工程等领域都非常重要的概率分布,在统计学的许多方面有着重大的影响力。若随机变量X服从一个数学期望为μ、标准方差为σ2的高斯分布,记为:则其概率密度函数为正态分布的期望值μ决定了其位置,其标准差σ决定了分布的幅度。因其曲线呈钟形,因此人们又经常称之为钟形曲线。我们通常所说的标准正态分布是μ= 0,σ= 1的正态分布。 二、正态分布的特性 1. 正太分布的曲线特征 正态曲线呈钟型,两头低,中间高,左右对称,曲线与横轴间的面积总等于1。 (1)集中性:正态曲线的高峰位于正中央,即均数所在的位置。 (2)对称性:正态曲线以均数为中心,左右对称,曲线两端永远不与横轴相交。 (3)均匀变动性:正态曲线由均数所在处开始,分别向左右两侧逐渐均匀下降。 计算机网络与通信实验报告(一)学号姓名班级报告日期 2015.04.15 实验内容网络常用命令的使用 实验目的1.熟悉网络命令的使用,例如ping,tracert,netstat,ipconfig等,对结果进行分析判断。 2.熟悉dns的层次查询,以及smtp协议。 实验预备知识结合实验报告相关知识以及老师课堂演示、笔记。 实验过程描述1.按照实验报告步骤所指,一步步熟悉ping tracert ipconfig 等网络命令,并对结果进行相应分析、截图。 2.Dns层次查询时,首先网上搜索全球13 个根域名服务器的ip,选择其中一个ip 对学校主页https://www.360docs.net/doc/4d11505205.html, 进行层次分析,依次进行cn https://www.360docs.net/doc/4d11505205.html, https://www.360docs.net/doc/4d11505205.html, https://www.360docs.net/doc/4d11505205.html, 的域名分析,最终得到主页ip,然后使用ping命令ping得主页ip 相比较,结果一致,查询成功。 3.熟悉掌握SMTP协议。Dos 命令下依次输入telnet相关命令,并使用事先转换成base64 的用户名、密码登陆邮箱。登陆成功后给自己的邮箱发送信息,最后退出。操作、邮箱截图如下。 实验结果见表格下方截图。 实验当中问题及解决方法1、telnet命令刚开始dos无法识别,属于不认识的命令。上网查询资料后,在控制面板中设置后成功解决。 2、熟悉SMTP协议时,telnet 登陆邮箱并发送信件,期间出现好多错误,比如单词拼写错误,指令错误。重复多次后最终成功实现。 成绩(教师打分)优秀良好及格不及格 实验相关截图 一、网络命令的使用 1.ping 命令 2.tracert 命令 哈尔滨工业大(威海) 2003 /2004 学年 秋 季学期 电工技术 试题(A) 题号 一 二 三 四 五 六 七 八 九 十 总分 附加题 分数 一、选择与填空( 20分 ,1-7每题 2分,8题每空2分) 1.图(1)所示电路中,a 、b 间的等效电阻为(4?)。 (1) (2) 2.试计算图(2)所示电路中的 A点的电位为(5V)。 3.将下图所示电路的ab 二端网络化成戴维南等效电路。 4.三相异步电动机的额定转速为 1460r/min 。当负载转矩为额定转矩的一 半时,电动机的转速为(1480r/min )。 姓名 班级: 注 意 行 为 规 范 遵 守 考 试 纪 律 10V I +-a b 0.5 I 1k Ω 1k Ω 5.电路如图所示,已知X L =R=X C ,并已知安培计A 的读数为5A ,则A 1的读数为(52A ),A 2的读数为(5A )。 6.有一交流铁心线圈,线圈匝数加倍,线圈的电阻及电源电压保持不变。铁心的磁感应强度将(增大、减小、不变),线圈中的电流将(增大、减 小 、不变) 7.将R L =8Ω的扬声器接在输出变压器的副绕组上,已知N1=300匝,N2=100匝,信号源电动势E=6V,内阻R0=100Ω,扬声器得到的功率为 (0.0876W)。 8.三相异步电动机的额定转速为1470转/分,电源电压为380V,三角形联接,功率为30kW ,效率为93%,功率因数为0.85。试计算额定转矩为(194.90N m ?);额定转差率为( 2% );额定电流为( 57.66A )。 二、图中N为无源电阻网络,已知当US=10V,IS=0时,UX=10V;当US=0,IS=1A时,UX=20V。求当US=20V,IS=3A时,UX为多少。(7分) 解: 由线性电路的叠加定理得: a s U + b s I = c x V 当V V s 10=时 V U I s s 10,0== 即 10a=10c + - U s + - U x 习 题 四 1.一个袋子中装有四个球,它们上面分别标有数字1,2,2,3,今从袋中任取一球后不放回,再从袋中任取一球,以,X Y 分别表示第一次,第二次取出的球上的标号,求(,)X Y 的 分布列. 解 (,)X Y 的分布列为 其中 (1,1)(1)(1|1)0P X Y P X P Y X ======= (1,2)(1)(2|1)P X Y P X P Y X ====== 121436 =?= 余者类推。 2.将一枚硬币连掷三次,以 X 表示在三次中出现正面的次数,以Y 表示三次中出现正 面次数与出现反面次数之差的绝对值,试写出(,)X Y 的分布列及边缘分布列。 解 一枚硬币连掷三次相当于三重贝努里试验,故1 ~(3,).2 X B 331 ()(),0,1,2,32 k P X k C k ===,于是(,)X Y 的分布列和边缘分布为 其中 (0,1)(0)(1|0)0P X Y P X P Y X =======, 13 313(1,1)(1)(1|1)()128 P X Y P X P Y X C =======?=, 余者类推。 3.设(,)X Y 的概率密度为 1 (6),02,24, (,)80,.x y x y f x y ?--<<< 汽车尾灯控制器 信安一班 1150320101-孙晨1150810613-李秋豪1152210121-路祥鹏 (按笔画顺序排列) 注:任何人可以自由的复制、修改、分发本文。但是如果您的版本中含有附录的参考图片:1.在用于非商业、非盈利、非广告性目的时需注明作者及出处“百度百科”。2.在用于商业、盈利、广告性目的时需征得作者同意,并注明作者姓名、授权范围及出处“百度百科”。GMT+8 2016-12-07 20:20 一、目录 设计要求------------------------------------------------------------- 3 工作原理,系统方框图----------------------------------------------- 3 各部分选定方案及说明----------------------------------------------- 5 总体设计图与仿真结果----------------------------------------------- 9 设计心得与总结------------------------------------------------------ 17 参考文献------------------------------------------------------------- 17 附录:总体器件表及其功能表、管脚分布----------------------------- 18 二、设计要求 设计一个汽车尾灯控制器。汽车尾部左右两侧各有3个指示灯。根据汽车运行情况,指示灯有4+2种显示模式: (1)汽车正向行驶,所有指示灯全部熄灭。 (2)汽车右转弯,右侧的三个指示灯按右循环模式顺序点亮。 (3)汽车左转弯,左侧的三个指示灯按左循环模式顺序点亮。 (4)临时刹车,左右两侧的指示灯同时处于闪烁状态。 (5)倒车状态,右侧的三个指示灯按右循环模式顺序点亮,同时左侧的三个指示灯按左循环模式顺序点亮。 (6)故障状态,所有灯全亮且不闪烁。 三、工作原理,系统方框图 大致原理:(详细介绍见第四部分) 该器件有六种状态,所以应该使用三个开关状态L1、L2、L3来表达。 对于正常行驶状态,灯全灭,即对所有的灯给低电平。 对于汽车右转弯,右侧的三个指示灯按右循环模式顺序点亮,可以采取三进制计数器(十进制改造)+三八译码器来实现,其中三进制计数器的输出作为译码器的输入,译码器的输出决定三个右侧灯的亮暗。 对于汽车左转弯,原理同汽车右转弯的实现方法。 对于临时刹车,可以使用CP信号直接决定六个灯的亮暗,达到闪烁的目的。 对于故障状态,对所有的灯置高电平。 最大似然估计学习总结(概率论大作业) 最大似然估计学习总结 航天学院探测制导与控制技术杨若眉1110420123 摘要:最大似然估计是一种统计方法,它用来求一个样本集的相关概率密度函数的参数。最大似然法明确地使用概率模型,其目标是寻找能够以较高概率产生观察数据的系统发生树。最大似然法是一类完全基于统计的系统发生树重建方法的代表。 关键词:最大似然估计;离散;连续;概率密度最大似然估计是一种统计方法,它用来求一个样本集的相关概率密度函数的参数。这个方法最早是遗传学家以及统计学家罗纳德·费雪爵士在1912年至1922年间开始使用的。 “似然”是对likelihood 的一种较为贴近文言文的翻译,“似然”用现代的中文来说即“可能性”。故而,若称之为“最大可能性估计”则更加通俗易懂。最大似然法明确地使用概率模型,其目标是寻找能够以较高概率产生观察数据的系统发生树。最大似然法是一类完全基于统计的系统发生树重建方法的代表。该方法在每组序列比对中考虑了每个核苷酸替换的概率。 最大似然法是要解决这样一个问题:给定一组数据和一个参数待定的模型,如何确定模型的参数,使得这个确定参数后的模型在所有模型中产生已知数据的概率最大。通俗一点讲,就是在什么情况下最有可能发生已知的事件。举个例子,假如有一个罐子,里面有黑白两种颜色的球,数目多少不知,两种颜色的比例也不知。我们想知道罐中白球和黑球的比例,但我们不能把罐中的球全部拿出来数。现在我们可以每次任意从已经摇匀的罐中拿一个球出来,记录球的颜色,然后把拿出来的球再放回罐中。这个过程可以重复,我们可以用记录的球的颜色来估计罐中黑白球的比例。假如在前面的一百次重复记录中,有七十次是白球,请问罐中白球所占的比例最有可能是多少? 我想很多人立马有答案:70%。这个答案是正确的。可是为什么呢?(常识嘛!这还要问?!)其实,在很多常识的背后,都有相应的理论支持。在上面的问题中,就有最大似然法的支持例如,转换出现的概率大约是颠换的三倍。在一个三条序列的比对中,如果发现其中有一列为一个C,一个T和一个G,我们有理由认为,C和T所哈工大电工综合设计完整版
哈工大单片机实验报告(上传)
哈工大概率论参考答案习题
哈工大_控制系统实践_磁悬浮实验报告
哈工大电工设计报告参考答案 2
哈工大概率论与数理统计课后习题答案 一
哈工大自动控制原理 大作业
哈工大计算机网络实验报告之五
哈工大 电工大作业
哈工大天线实验报告
哈工大2015年概率统计试题及答案
(完整版)哈工大-数值分析上机实验报告
哈工大DSP大作业
概率论课程期末论文大作业
哈工大威海计算机网络实验报告1资料
哈工大电工技术 试题
哈工大概率论与数理统计课后习题答案四
哈工大数字逻辑大作业
最大似然估计学习总结(概率论大作业)