MEMS陀螺误差辨识与补偿
2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s)
M E M S陀螺误差辨识与补偿
谈振藩,张勤拓
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
摘 要:由于制造工艺等原因,M E M S陀螺的随机漂移非常大,严重影响了系统的性能。通过自制的基于
M E M S的捷联惯导系统的相关实验,对M E M S陀螺的确定性误差和随机误差分别进行了辨识和补偿。完
成确定性误差补偿,对M E M S陀螺随机误差进行了时间序列分析,并建立了A R模型,根据所选模型参数
建立了随机误差的系统方程,采用经典卡尔曼滤波进行随机误差补偿。实验结果说明:无论是静态下还是
动态下,补偿后信号的方差都大大下降,说明了滤波效果较为明显,具有一定的工程应用价值。
关键词:M E M S陀螺;时间序列分析;A R模型;卡尔曼滤波
中图分类号:T P212 文献标识码:A 文章编号:1000—9787(2010)03—0039—03
E r r o r i d e n t i f i c a t i o na n dc o m p e n s a t i o no f ME MSg y r o s c o p e
T A NZ h e n-f a n,Z H A N GQ i n-t u o
(C o l l e g e o f A u t o m a t i o n,H a r b i nE n g i n e e r i n g U n i v e r s i t y,H a r b i n150001,C h i n a)
A b s t r a c t:M E M Sg y r o's r a n d o m d r i f t i s v e r yl a r g e,b e c a u s eo f t h em a n u f a c t u r i n gp r o c e s sa n do t h e r r e a s o n s,
w h i c hs e r i o u s l y a f f e c t o n s y s t e mp e r f o r m a n c e.T h r o u g h e x p e r i m e n t s o f M E M S s t r a p d o w n i n e r t i a l n a v i g a t i o ns y s t e m,
d e t e r m i n i s t i c a n ds t o c h a s t i c e r r o r w a s i d e n t i f i e da n dc o m p e n s a t e d.A f t e r d e t e r m i n i s t i ce r r o r w a s c o m p e n s a t e d,t h e
s t o c h a s t i ce r r o r w a s a n a l y z e d b a s e d o nt i m e s e r i e s a n dA Rm o d e l w a s s e t u p.S y s t e m e q u a t i o no f s t o c h a s t i ce r r o r
w a s e s t a b l i s h e d b a s e d o nt h e s e l e c t e dm o d e l a n dt h ee r r o r w a s c o m p e n s a t e db y K a l m a nF i l t e r.T e s t r e s u l t s s h o w
t h a t v a r i a n c e o f M E M S g y r o s c o p e s t o c h a s t i c e r r o r r e d u c e d g r e a t l y a f t e r f i l t e r,w h i c h i l l u s t r a t e s t h e f i l t e r i n g e f f e c t i s
o b v i o u s,a n d h a s a c e r t a i nv a l u e o f e n g i n e e r i n g a p p l i c a t i o n.
K e yw o r d s:M E M S g y r o s c o p e;t i m e s e r i e s a n a l y s i s;A Rm o d e l;K a l m a nf i l t e r
0 引 言
微机电系统(m i c r o-e l e c t r o-m e c h a n i c a l-s y s t e m,M E M S)陀螺仪已经出现了近二十年[1],与其他陀螺相比,M E M S陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优势,但由于早期精度较低,并没有引起重视。近些年,随着微电子加工技术的发展,M E M S惯性传感器特别是陀螺仪的精度获得大幅度的提高。基于M E M S惯性传感器的惯性导航系统己成为当今惯性技术领域的一个重要的研究热点。西北工业大学的苑伟政教授提出了虚拟陀螺的概念,通过研究同类传感器的相关性来提高其测量精度;东南大学的吉训生博士,把形态学滤波的思想引入到M E M S陀螺降噪中,具有一定的理论研究意义[2]。另外,还有很多学者提出了新的思路和方法,并仿真取得了一定的效果。但目前的众多学者的研究多处于理论研究方面,大多集中在对漂移的离线降噪。
M E M S陀螺仪精度较低的主要原因是输出信号中随机噪声含量较大,因此,在使用前对陀螺随机误差进行辨识和
收稿日期:2010—01—04降噪处理是十分必要的[3]。目前常用的陀螺仪随机误差辨识方法有自回归滑动平均(A R M A)建模法、功率谱密度分析(P S D)法和A l l a n方差分析法[4]。哈尔滨工程大学的张树侠教授针对激光陀螺和光纤陀螺的特点,分别建立了A R M A模型[5,6];东南大学的吉训生在对M E M S陀螺随机漂移信号建立A R(2)模型后,采用鲁棒性很强的H
∞
滤波
方法,证明了H
∞
滤波效果和实时性比小波变换要好[7]。
本文针对实际系统,从陀螺测量模型出发,全面地辨识出陀螺各误差项,尤其对M E M S陀螺随机噪声进行了建模和补偿,具有一定的工程实用价值。
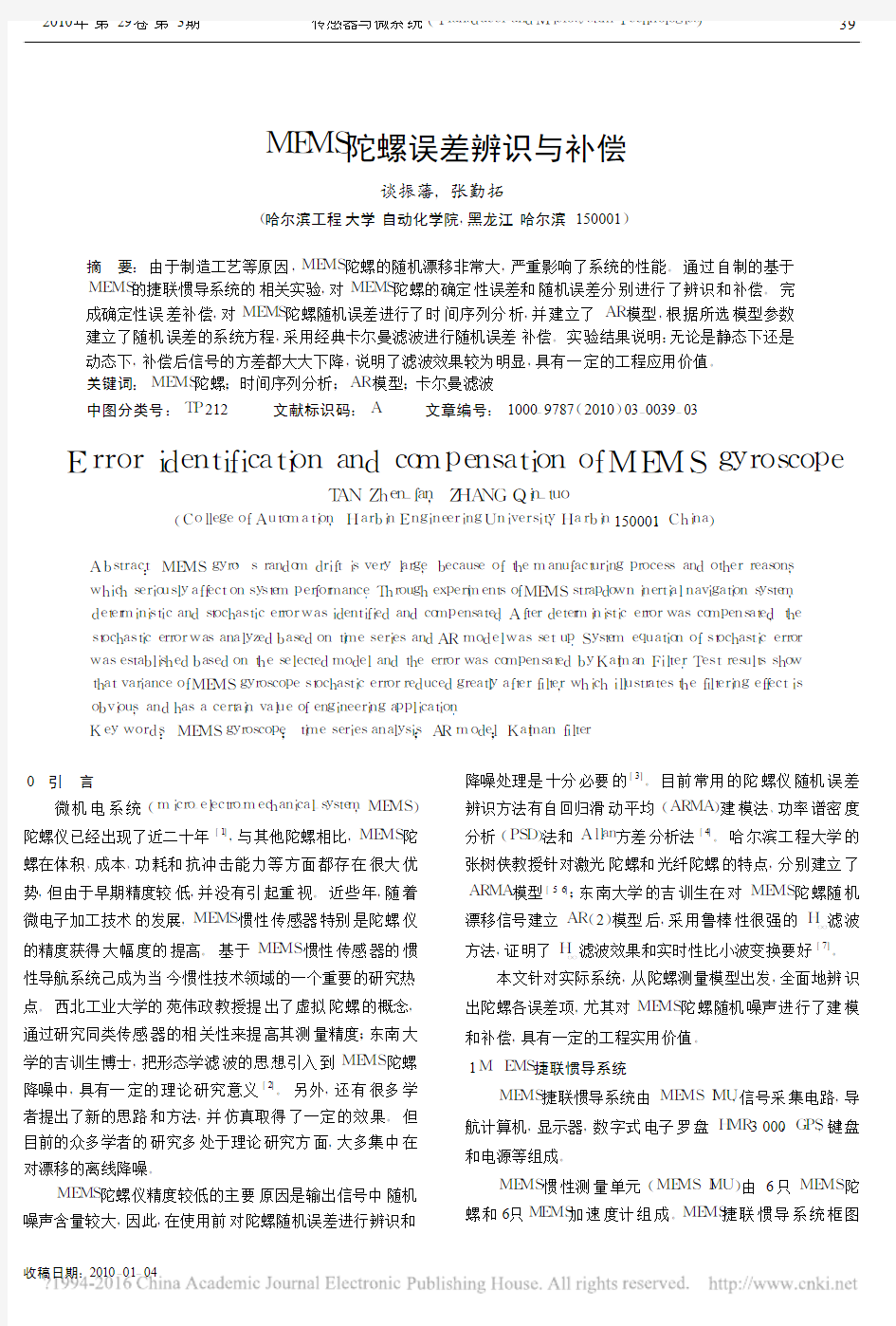
1 M E M S捷联惯导系统
M E M S捷联惯导系统由M E M SI M U,信号采集电路,导航计算机,显示器,数字式电子罗盘H M R3000,G P S,键盘和电源等组成。
M E M S惯性测量单元(M E M SI M U)由6只M E M S陀螺和6只M E M S加速度计组成。M E M S捷联惯导系统框图
39
DOI:10.13873/j.1000-97872010.03.003
传感器与微系统 第29卷如图1
。
图1 ME MS 捷联惯导系统F i g 1 ME MSs t r a p d o w ni n e r t i a l s y s t e m
2 M E M S 陀螺测量模型
M E M S 陀螺测量模型为
ωz =(1+S z )ωz +M x ωx +M y ωy +B f +n z
,(1)
式中 S z 为刻度因数误差;B f 为零偏;n z
为随机噪声;M x ,M y 为耦合误差。为简便起见,测量模型可简化为
ωz =ωz +S z ωz +B f +n z .
(2)其中,零偏和刻度因数误差称为确定性误差,可以通过有效的标定方法进行一定精度的补偿,而随机误差是陀螺误差辨识的难点。3 确定性误差辨识与补偿
将系统置于三轴转台上,通过速率实验和多位置实验可以容易地确定陀螺的确定性误差项[8],各参数可以直接装订到程序中。各误差项如表1所示。
表1 三轴陀螺确定性误差T a b 1 D e t e r m i n i s t i c e r r o ro f g y r o s
误差项X 陀螺
Y 陀螺
Z 陀螺
S z 0.03350.1719-0.1239B f
0.00320.00340.0017
4 随机误差辨识与补偿
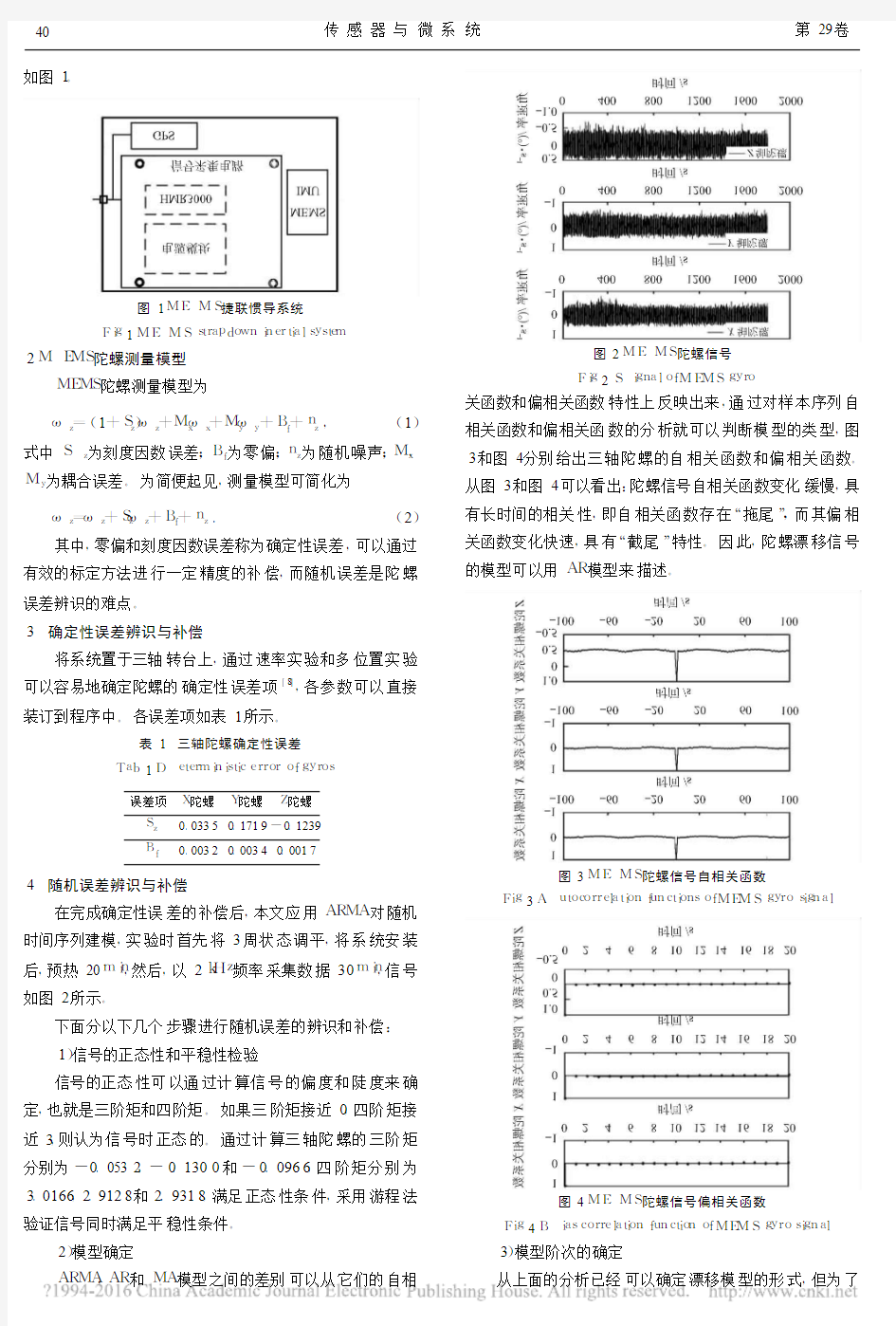
在完成确定性误差的补偿后,本文应用A R M A 对随机时间序列建模,实验时首先将3周状态调平,将系统安装后,预热20m i n ,然后,以2k H z 频率采集数据30m i n ,信号如图2所示。
下面分以下几个步骤进行随机误差的辨识和补偿:
1)信号的正态性和平稳性检验
信号的正态性可以通过计算信号的偏度和陡度来确定,也就是三阶矩和四阶矩。如果三阶矩接近0,四阶矩接近3,则认为信号时正态的。通过计算三轴陀螺的三阶矩分别为-0.0532,-0.1300和-0.0966,四阶矩分别为3.0166,2.9128和2.9318,满足正态性条件,采用游程法验证信号同时满足平稳性条件。
2)模型确定
A R M A ,A R 和M A 模型之间的差别可以从它们的自相
图2 ME MS 陀螺信号F i g 2 S i g n a l o f ME MSg y r o
关函数和偏相关函数特性上反映出来,通过对样本序列自相关函数和偏相关函数的分析就可以判断模型的类型,图3和图4分别给出三轴陀螺的自相关函数和偏相关函数。从图3和图4可以看出:陀螺信号自相关函数变化缓慢,具有长时间的相关性,即自相关函数存在“拖尾”,而其偏相关函数变化快速,具有“截尾”特性。因此,陀螺漂移信号的模型可以用A R 模型来描述。
图3 ME MS 陀螺信号自相关函数
F i g 3 A u t o c o r r e l a t i o nf u n c t i o n s o f ME MSg y r os i g n a l
图4 ME MS 陀螺信号偏相关函数
F i g 4 B i a s c o r r e l a t i o nf u n c t i o no f ME MSg y r o s i g n a l
3)模型阶次的确定
从上面的分析已经可以确定漂移模型的形式,但为了
40
第3期 谈振藩,等:M E M S 陀螺误差辨识与补偿 确定模型的阶数,还得借助P P E 准则或者A I C 准则,寻找使P P E 准则或者A I C 准则取最小值的模型,确定最适合的模型和阶次,以X 陀螺为例,表2给出所有适合的模型系数A I C 的值。
表2 陀螺随机漂移A R MA 模型的参数T a b 2 P a r a m e t e r o f A R MAm o d e l o f g y r o
参数A R (1)A R (2)A R (3)Υ10.4628
0.62140.7149Υ20.3427
0.5123Υ30.2727A I C
2.932×103
2.682×103
2.537×103
从表2中可以看出:A I C 值差别不大,从工程实用的角度,选择A R (1)模型作为陀螺随机漂移的模型。
4)建立随机误差的系统方程
陀螺漂移是一个随机平稳过程,根据上面的分析,对X 陀螺用A R (1)模型来描述
x (k )=0.4628x (k -1)+w (k ).
(3)
其中,x (k )是漂移模型的状态,w (k )是均值为零,方差为0.6185(由实际数据计算)的白噪声,从系统的观点出发,认为漂移是以白噪声为输入的系统的输出。
而卡尔曼滤波的状态方程为
[9]
x k =Υk ,k -1X k -1+Γk ,k -1W k -1.
(4)
其中,Υk ,k -1=
1
00.4628
,W(k )为系统的状态噪
声,其方差为d i a g (0,0.6185),状态向量为
X k =[ωk ,q k
].(5)
其中,ωk 为陀螺角速率;q k
为A R 模型对应的随机漂移部分。系统的观测值y (k )可以表示为状态量加上观测噪声ν(k ),ν(k )是均值为0,方差为2.9527的白噪声,卡尔曼滤波的观测方程为
y k =C k x k +νk
.(6)
其中,C k
=[1,1],对状态方程(5)和观测方程(6),P 的初值定为1000,x (0)=[0,0]。图6给出了滤波前后的数据,滤波后的信号方差是0.1524,为滤波前的23.34%。
为了更进一步说明方法的正确性,将系统放置在三轴转台上,以10°/s 的角速率转动,采集数据30s ,采样频率为20H z ,对实验数据进行分析,滤波结果如图7所示,可以看出:在动态下具有和静态下一致的效果。
经计算,滤波前的测量数据方差为0.4221,滤波后估计值的方差为0.1324,为滤波前的31.35%,滤波效果明显,它可以满足实时性的要求。5 结 论
通过对自研的M E M S 捷联惯导系统的研究,分别对
图5 静态滤波效果F i g 5 S t a t i c f i l t e r i n ge f f e c t
图6 动态滤波效果F i g 6 D y n a m i c f i l t e r i n ge f f e c t
M E M S 陀螺的确定性误差和随机误差进行了辨识和补偿,通过建立随机误差的A R 模型,采用卡尔曼滤波进行了补偿,并在动态下进行了验证,无论静态还是动态下,补偿后的信号方差优于补偿前的30%,说明了建模方法正确,滤
波效果明显,具有一定的工程应用价值。参考文献:
[1] 李荣冰,刘建业.基于M E M S 技术的微型惯性导航系统的发
展现状[J ].中国惯性技术学报,2004(6):88-94.
[2] 吉训生,王寿荣.M E M S 陀螺仪随机漂移误差研究[J ].宇航
学报,2006,27(4):640-642.
[3] S h k e l A M .T y p e Ⅰa n dT y p e Ⅱm i c r om a c h i n e dv i b r a t o r yg y r o -s c o p e [C ]∥P r o c e e d i n go f P o s i t i o n ,L o c a t i o na n dN a v i g a t i o nS y s -t e m ,2006.
[4] 杨叔子,吴 雅.时间序列分析的工程应用[M].武汉:华中
理工大学出版社,1996.
[5] 张树侠.激光陀螺漂移的数据建模和滤波[J ].中国惯性技术
学报,1999,17(4):70-72.
[6] 张树侠,闫 威.激光陀螺漂移的数据建模和滤波[J ].中国
惯性技术学报,1999,7(4):21-25.
[7] 吉训生,王寿荣,许宜申.自适应K a l m a n 滤波在M E M S 陀螺
仪信号处理中的应用[J ].传感器与微系统,2006,25(9):79-82.
[8] I E E ES t d 647—1995.I E E ES t a n d a r dS p e c i f i c a t i o nF o r m a t G u i d e
a n d T e s t P r o c e d u r e f o r S i n g l e -A x i s L a s e r G y r o [S ].
[9] 付梦印,邓志红,张继伟.K a l m a n 滤波理论及其在惯性导航
系统中的应用[M ].北京:科学出版社,2003:10.
作者简介:
谈振藩(1942-),男,江苏苏州人,教授,博士生导师,主要研究方向为导航系统自动化。
41
MEMS陀螺误差辨识与补偿
2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s) M E M S陀螺误差辨识与补偿 谈振藩,张勤拓 (哈尔滨工程大学自动化学院,黑龙江哈尔滨150001) 摘 要:由于制造工艺等原因,M E M S陀螺的随机漂移非常大,严重影响了系统的性能。通过自制的基于 M E M S的捷联惯导系统的相关实验,对M E M S陀螺的确定性误差和随机误差分别进行了辨识和补偿。完 成确定性误差补偿,对M E M S陀螺随机误差进行了时间序列分析,并建立了A R模型,根据所选模型参数 建立了随机误差的系统方程,采用经典卡尔曼滤波进行随机误差补偿。实验结果说明:无论是静态下还是 动态下,补偿后信号的方差都大大下降,说明了滤波效果较为明显,具有一定的工程应用价值。 关键词:M E M S陀螺;时间序列分析;A R模型;卡尔曼滤波 中图分类号:T P212 文献标识码:A 文章编号:1000—9787(2010)03—0039—03 E r r o r i d e n t i f i c a t i o na n dc o m p e n s a t i o no f ME MSg y r o s c o p e T A NZ h e n-f a n,Z H A N GQ i n-t u o (C o l l e g e o f A u t o m a t i o n,H a r b i nE n g i n e e r i n g U n i v e r s i t y,H a r b i n150001,C h i n a) A b s t r a c t:M E M Sg y r o's r a n d o m d r i f t i s v e r yl a r g e,b e c a u s eo f t h em a n u f a c t u r i n gp r o c e s sa n do t h e r r e a s o n s, w h i c hs e r i o u s l y a f f e c t o n s y s t e mp e r f o r m a n c e.T h r o u g h e x p e r i m e n t s o f M E M S s t r a p d o w n i n e r t i a l n a v i g a t i o ns y s t e m, d e t e r m i n i s t i c a n ds t o c h a s t i c e r r o r w a s i d e n t i f i e da n dc o m p e n s a t e d.A f t e r d e t e r m i n i s t i ce r r o r w a s c o m p e n s a t e d,t h e s t o c h a s t i ce r r o r w a s a n a l y z e d b a s e d o nt i m e s e r i e s a n dA Rm o d e l w a s s e t u p.S y s t e m e q u a t i o no f s t o c h a s t i ce r r o r w a s e s t a b l i s h e d b a s e d o nt h e s e l e c t e dm o d e l a n dt h ee r r o r w a s c o m p e n s a t e db y K a l m a nF i l t e r.T e s t r e s u l t s s h o w t h a t v a r i a n c e o f M E M S g y r o s c o p e s t o c h a s t i c e r r o r r e d u c e d g r e a t l y a f t e r f i l t e r,w h i c h i l l u s t r a t e s t h e f i l t e r i n g e f f e c t i s o b v i o u s,a n d h a s a c e r t a i nv a l u e o f e n g i n e e r i n g a p p l i c a t i o n. K e yw o r d s:M E M S g y r o s c o p e;t i m e s e r i e s a n a l y s i s;A Rm o d e l;K a l m a nf i l t e r 0 引 言 微机电系统(m i c r o-e l e c t r o-m e c h a n i c a l-s y s t e m,M E M S)陀螺仪已经出现了近二十年[1],与其他陀螺相比,M E M S陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优势,但由于早期精度较低,并没有引起重视。近些年,随着微电子加工技术的发展,M E M S惯性传感器特别是陀螺仪的精度获得大幅度的提高。基于M E M S惯性传感器的惯性导航系统己成为当今惯性技术领域的一个重要的研究热点。西北工业大学的苑伟政教授提出了虚拟陀螺的概念,通过研究同类传感器的相关性来提高其测量精度;东南大学的吉训生博士,把形态学滤波的思想引入到M E M S陀螺降噪中,具有一定的理论研究意义[2]。另外,还有很多学者提出了新的思路和方法,并仿真取得了一定的效果。但目前的众多学者的研究多处于理论研究方面,大多集中在对漂移的离线降噪。 M E M S陀螺仪精度较低的主要原因是输出信号中随机噪声含量较大,因此,在使用前对陀螺随机误差进行辨识和 收稿日期:2010—01—04降噪处理是十分必要的[3]。目前常用的陀螺仪随机误差辨识方法有自回归滑动平均(A R M A)建模法、功率谱密度分析(P S D)法和A l l a n方差分析法[4]。哈尔滨工程大学的张树侠教授针对激光陀螺和光纤陀螺的特点,分别建立了A R M A模型[5,6];东南大学的吉训生在对M E M S陀螺随机漂移信号建立A R(2)模型后,采用鲁棒性很强的H ∞ 滤波 方法,证明了H ∞ 滤波效果和实时性比小波变换要好[7]。 本文针对实际系统,从陀螺测量模型出发,全面地辨识出陀螺各误差项,尤其对M E M S陀螺随机噪声进行了建模和补偿,具有一定的工程实用价值。 1 M E M S捷联惯导系统 M E M S捷联惯导系统由M E M SI M U,信号采集电路,导航计算机,显示器,数字式电子罗盘H M R3000,G P S,键盘和电源等组成。 M E M S惯性测量单元(M E M SI M U)由6只M E M S陀螺和6只M E M S加速度计组成。M E M S捷联惯导系统框图 39 DOI:10.13873/j.1000-97872010.03.003
陀螺最小二乘法温度补偿
基于MEMS姿态传感器温度补偿方法传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。硬件补偿方法主要是改变电路来达到补偿效果,但是这种方法会导致电路的复杂化,同时提高了成本。软件补偿方法主要有最小二乘法、BP 神经网络法、回归法等。从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。 1 姿态传感器的温度补偿原理 本文采用美国InvenSense 公司生产的ITG3205三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。 传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。姿态传感器的温度补偿原理如框图1所示。 2 姿态传感器的温度补偿方法 在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即y = mx + n 的线性关系。通过最小二乘法进行线性拟合,可以得出参数m 和n 的值。 此时可以发现,在不同的温度下,所拟合出来的m和n 值是随温度的变化而变化的。在此情况下,必须找出温度分别与m 和n 之间的关系,为此同样可以根据最小二乘法再次进行曲线拟合,从而得出m 值与温度之间的关系。同理也可以得出n 与温度之间的关系。经过两次曲线拟合之后,可以得出理论值与输出值之间的误差有了明显的减小,并且满足预期的要求。在实际应用中,为了达到高精度检测的要求,可以通过测量多组数据进行曲线拟合的方法来实现。 3 姿态传感器的实验数据处理 由于各轴的检测原理是相同的,因此本论文采用x轴的检测数据进行实验验证。主要的实验仪器有被测姿态传感器、经纬仪、高低恒温箱、高精度角度检测仪等。表1所得数据是未经温度补偿时的实验数据,即原始数据。
总方差方法在光纤陀螺随机误差分析中的应用
电V ol.39, No.1 第39卷第1期 光工程 2012年1月Opto-Electronic Engineering Jan, 2012 文章编号:1003-501X(2012)01-0062-06 总方差方法在光纤陀螺随机误差分析中的应用 石祥 国1,陈坚1,叶军1,王林2 ( 1. 第二炮兵工程学院,西安 710025; 2. 第二炮兵驻孝感地区军事代表室,湖北孝感 432100 ) 摘要:总方差方法被引入到光纤陀螺随机误差特性分析当中,有效克服了传统Allan方差法在长相关时间上计算易出现“崩溃”的问题。但用它直接分析光纤陀螺随机噪声存在算法偏差,不能真实反映角度随机游走噪声、量化噪声和指数相关噪声方差值,因此在算法上对总方差提出改进,使其适用于光纤陀螺噪声分析。对模拟的各项随机噪声进行仿真计算,验证改进后总方差方法可有效辨识噪声类型和水平。对光纤陀螺实测数据方差分析表明改进的总方差方法在平均因子较大的情况下可提高估计置信度,方差值稳定性好,比Allan方差法能更精确地分析出噪声项系数。 关键词:光纤陀螺;Allan方差;总方差;功率谱密度 中图分类号:TN253 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.01.011 Applications of Total Variance Method in Random Error Analysis of the Fiber Optic Gyro Signal SHI Guo-xiang1,CHEN Jian1,YE Jun1,WANG Lin2 ( 1. The Second Artillery Engineering College, Xi’an 710025, China; 2. The Second Artillery Representative Room of Xiaogan District, Xiaogan 432100, Hubei Province, China ) Abstract: Total variance is used to analyze the random noise of Fiber Optic Gyroscope (FOG), which efficiently solves the problem that the Allan variance calculation is easy to be unstable at long-term τ values. But there is algorithm error with total variance when analyzing the random noise of FOG directly, which cannot really reflect the variances of rate random walk noise, quantization noise and exponentially correlated noise. So an improved method based on total variance is presented to suit random noise analysis of FOG. The estimation performance with the simulated random noise shows that the improved total variance can efficiently identify the noise types and levels. According to the analysis of measured FOG signal, it can improve the confidence in the case of great mean index, the values of variance have a good stability, and it is better and more exact than Allan Variance in identifying noise coefficient. Key words: fiber optic gyroscope; Allan variance; total variance; power spectrum density 0 引 言 光纤陀螺(FOG)作为新一代的全固态惯性器件,已被广泛地应用于捷联式惯性导航系统。但由于其自身的结构特点和易受环境影响,输出信号中含有大量随机噪声,这些噪声往往呈现非平稳性和非正态分布特性,它们是影响光纤陀螺精度的一个关键因素。对光纤陀螺输出信号中的噪声进行有效地估计和辨识有助于进一步分析随机误差产生的原因,采取相应的补偿方法提高光纤陀螺性能。 Allan方差分析法作为IEEE认可的光纤陀螺误差项分析标准方法,能非常容易地对各种误差源及整个噪声统计特性进行细致的表征和辨识。“差分”是Allan方差分析的核心思想,即信号时域数据的二次差分收稿日期:2011-07-17; 收到修改稿日期:2011-10-19 作者简介:石国祥(1984-),男(汉族),陕西西安人。硕士研究生,研究方向:导航、制导与控制。E-mail:stone.712@https://www.360docs.net/doc/4e11535818.html,。
光纤陀螺随机误差的测定方法研究(精)
第33卷第2期应用科技V01.33.No.22006年2月AppliedScienceandTechnologyFeb.2006文章编号:1009—671X(2006)02—0040—03 光纤陀螺随机误差的测定方法研究 罗超1,贺林2,孙蓉1 (1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001) 摘要:针对光纤陀螺的随机噪声,分析了其产生的来源;对于5种主要的噪声源,运用IEEE公认的在时域上 对频域稳定性进行分析的方法——Allan方差法,进行了特性分析,并给出了误差系数的计算公式.同时介绍了 只测定角度随机游走系数时的2种简单测定方法:模型拟合法、归一化计算法;对于一组实际的陀螺零偏数据 进行了测定. 关键词:光纤陀螺;随机误差;Allan方差 中图分类号:TH824.3文献标识码:A Researchonthemeasurementofrandomerroroffiberopticgyro LUOCha01,HELin2,SUNRon91 (1.SchoolofAutomation,HarbinEngineeringUniversity,Harbin150001,China;2.SchoolofPowerandEnergyEngineering,HarbinEngineeringUniversity,Harbin150001,China) Abstract:Thesourceofrandomerrorsoffiberopticgyro(FOG)isanalysed.For5mainnoises,theAllanvariancemethod,whichisthemethodtoanalysethefrequencydomainstabilityontimedomainacknowledgedbyIEEE,isusedtomakeacharacteristicanalysis,andtheformulastocalculateerrorcoefficientsaregiven.Again,twosimplemeasuringmethods,modelfittingmethodandnormalizedcalculationalmethodaregiventomeasureonlytheangular
光纤陀螺的温度试验与误差补偿
第36卷第12期2009年12月 光电工程 Opto-ElectronicEngineering V01.36,No.12 Dee,2009 文章编号:1003—501X(2009)12—0132—06 光纤陀螺的温度试验与误差补偿 李家垒1,何婧2,许化龙1 (1.第二炮兵工程学院,西安710025} 2.96411部队23分队,陕西宝鸡721006) 摘要:分析了光纤陀螺的温度特性及非线性特性,并在组建光纤陀螺温度试验系统的基础上,进行了全温度范围下的位置试验和角速率试验,研究不同的温度及输入角速率对光纤陀螺输出的影响。根据试验结果,分别建立了光纤陀螺零偏的温度模型以及标度因数的温度和非线性模型,并采用最小二乘法拟合模型的参数。通过实测数据进行仿真验证,结果表明,建立的模型能够较好地描述光纤陀螺的温度及非线性特性,利用该模型进行光纤陀螺的温度和非线性误差补偿,取得了较好的效果,光纤陀螺的测试精度得到了较大程度的提高。 关键词:光纤陀螺;温度试验;温度模型:非线性模型 中图分类号:V241.5文献标志码:Adoi:10.3969/j.issn.1003.501X.2009.12.026 TemperatureTestandErrorCompensationofFOG LIJia.1eil,HEJin92,XUHua-longl (1.TheSecondArtilleryEngineeringCollegestaff,X/'an710025,China; 2.Unit23ofArmy96411,Baoji721006,ShaanxiProvince,China) Abstract:ThetemperatureandnonlinearcharacteristicsofFiberOpticGyro(FOG)aleanalyzed,andpositionandangularvelocityexperimentsarecarriedoutbasedonthetemperaturelestsystem,SOtheeffectsofdifferenttemperatureandangularvelocityonFOG’Soutputcanbestudied.Accordingtoexperimentalresults,temperatureerrormodelofzerobiasandtemperatureandnonlinearerrormodelofscalefactorofFOGarebuilt,whoseparametersareestimatedbyusingleastsquaremethod.Throughsimulation,itisprovedthatthebuiltmodelstanreflectthetemperatureandnonlinearcharacteristicsofFOGverywell,Thenthecompensationcanbedonebasedonthemodels,andtheaccuracyofFOGCallbeimprovedgreatly. Keywords:fiberopticgyro;temperaturetest;temperaturemodel;nonlinearmodel 0引言 光纤陀螺是一种基于Sagnac效应¨1的测量仪表,它利用固态的全光纤结构实现载体自转角速度的测量。与传统的机械陀螺相比有许多突出的优点,如精度高、耐冲击、抗震性好、动态范围大、对重力加速度不敏感等。由于构成光纤陀螺的核心部件对温度较为敏感,温度已成为光纡陀螺迈向工程化所面临的难题之一。当光纤陀螺工作环境的温度发生变化时,在陀螺的输出信号中将产生热致非互易相位噪声¨圳,这种噪声是导致光纤陀螺零偏和标度因数不稳定的主要原因;当输入角速率比较大时,还会产生标度因数的非线性偏差,对于开环光纤陀螺尤为明显,因此有必要采取温度和非线性补偿措施。 论文对某型开环光纤陀螺进行了全温位置和速率试验,研究了其受温度影响的情况,通过对试验结果的分析和建模,得到了一些重要结论,对于研究光纤陀螺的温度特性p1具有一定的工程意义和理论价值。 收稿日期:2009-05-31。收到修改稿日期:2009-07—17 作者简介:李家垒(1983一),男(汉族),山东青州人。博士研究生。主要研究工作是光惯导系统。E-mail:lijialei20052005@yahOo.com.cn。 万方数据
光纤陀螺随机误差建模与滤波方法研究(精)
第34卷增刊光学技术Vol.34Suppl. 2008年12月OPTICALTECHNIQUEDec.2008 文章编号:100221582(2008)S2******* 光纤陀螺随机误差建模与滤波方法研究 李晓峰,徐军,张胜修 (第二炮兵工程学院,西安710025) Ξ 摘要:提出了一种适用于高精度光纤陀螺的静态输出信号建模的时间序列模型,尔曼滤波器。结果表明,该建模和滤波方法有效地减小了FOG的误差,,提高了导航精度,具有较好的实用价值。 关键词:光纤陀螺;时间序列;随机漂移;卡尔曼滤波中图分类号:U666.1文献标识码:A Studyonthemodelinggyroscoperandomerror ,J,ZHANGSheng2xiu EngineeringCollege,Xi′an710025,China) Abstract:whichcanbeappliedinthemodelingofhigh2preciseFOG′sstaticoutputsignalispre2 sented,andtheKalmanfilterofFOGrandomerrorisbuilt.Theresultshowsthatthismodelingan dfilteringmethodcanreducetheerrorofhigh2preciseFOG.Thenavigationerrorsaredepresse d,andthenavigationprecisionisimproved. Keywords:FOG;timesequence;randomdrift;Kalmanfilter 1引言 陀螺仪是用于自主测量载体相对于惯性空间旋转运动的 元件,因此以陀螺仪为核心的惯性测量系统在飞行器控制与制导,空中、海上和陆上导航/定位中都起着至关重要的作用。光纤陀螺仪是利用Sagnac效应的角速度传感器。Sagnac效应是指当环形干涉仪旋转时,产生一个正比于旋转速率的相位差。光纤陀螺仪具有可靠性高、抗冲击、频带宽、成本低、平均无故障时间长等诸多优点,因此在惯性制导和导航的许多应用领域[1,2],已经将光纤陀螺仪作为一项关键技术进行研究。
基于振动陀螺的动态零位校准及其误差补偿
收稿日期:2007211206 基金项目:重庆市科委自然科学基金资助项目(CST G2007BB2448,CST G2007BB4385);重庆邮电大学博士启动基金资助项目(A2007245) 作者简介:刘宇(19722),男,重庆人,博士,主要研究方向为惯性导航及信号处理。 文章编号:100422474(2008)0620671203 基于振动陀螺的动态零位校准及其误差补偿 刘 宇1,2,刘 俊1,黎蕾蕾2,孙燕彬1,李秋俊1 (1.重庆邮电大学光电工程学院,重庆400065;2.重庆大学光电技术及系统教育部重点实验室,重庆400044) 摘 要:根据固态振动陀螺输出信号和噪声特点对其构成的低成本惯性测量单元(IMU )的原始传感信号进行 了快速小波滤波和灰色理论建模处理。运用累加生成操作(A GO )方法得到有规则的单值对应非线性函数,并获得陀螺零位输出在三维空间中的单值映射模型。以时间和温度为输入,根据灰色神经网络建立陀螺的漂移模型,对累加生成方法生成的单值对应非线性函数进行逼近,从而提高了动态测量精度。同时采用活动阈值融合算法,优化陀螺和加速度计动态测量数据。实验证明,上述方法和算法有效提高了系统测量精度。 关键词:陀螺;惯性测量单元(IMU );滤波;数据融合中图分类号:V241 文献标识码:A Dynamic Zero Output Adjustment and System Error Compensation B ased on Low Cost Vibration G yro L IU Yu 1,2,L IU Jun 1,L I Lei 2lei 2,SUN Yan 2bin 1,L I Q iu 2jun 1 (1.College of Optoelectronics Engineering ,Chongqing University of Post s and Telecommunications ,Chongqing 400065,China ; 2.College of Optoelect ronics Engineering ,Chongqing University ,Chongqing 400044,China ) Abstract :The sensor signal filtered through fast wavelet and compensated by Grey model was proposed accord 2ing to the characteristics of signal and noise output.Grey accumulate operation (A GO )was adopted to achieve the regularly single 2mapping f unction and the model of single 2mapping of gyro’s zero output in three dimension coordi 2nates.The model based on the Grey neural network approximated the f unction of created by the A GO algorithm and improved the measurement accuracy of IMU.At the same time ,the active threshold based on the f usion algorithm was used to optimize the measurement datum of gyro and accelerometer.Experiments proved these method and algo 2rithm increased the system ’s accuracy successf ully. K ey w ords :gyro ;inertial measurement unit (IMU );filter ;data f usion 在飞行器低速运动或俯仰和横滚方向改变时,陀螺的模拟输出实际是围绕静态零位点的正负变化曲线。捕捉这种运动状态下的零位一直是姿态测量领域的难点,文献[122]采用硬件实现的动态零位补偿,但效果不好。 惯性测量单元(IMU )要实现动态测量,陀螺必须在整个测量时间和工作温度范围内有效补偿零位漂移。零位漂移是一个非线性、非平稳的随机过程,传统的补偿和修正方法很多,常用的方法有回归分析法和曲线拟合法。这些方法的共同处是为消除某种非目标参量对传感器输出特性的影响,系统中必须有相应的设置来测量该目标参量的敏感元件,以测量当前非目标参量的实际值,然后按照传感器事先已有的标定曲线加以修正。但这会增加系统的复杂度和硬件成本,且也只能针对其中的主要因素。目前采用的自回归(AMA R )建模对传感器零位输出进行模拟的方法很难建立准确稳定的AR 模型。基于小波分析的趋势项提取方法[3]过程繁杂,且本身存在一定的限制,这种限制在通常情况下会造成虚假的谐波,而依此进行的一系列分析也将失去原有的物理意义。将小波分析理论引入建模数据的预处理,可抑制冲击干扰噪声,提高神经网络的建模精度,但对逐次启动参数的不一致和多值对应的性能参数并不能很好地模拟[4]。神经网络得到的近似补偿模型包含了所有的非线性影响因素,但建模精度将受数据随机性的影响,随机性越大,建模精度越低,反之亦然。因此,如果在不充分考虑影响陀螺漂移的温度因子和时间因子等多种因素,对数据进行有效的预处理以降低其随机性,则会降低神经网络的建模精度。 本文首先对传感器输出信号进行预处理。根据陀螺输出信号特点对原始信号进行快速小波滤波预处理,实现对数据奇异点的检测和去除[5];加速度传感器、角速度传感器、温度传感器采集经过快速小波滤波预处理后的相应信号,送入DSP 完成数据融合计算,应用灰色理论建模,运用累加生成A GO 操作,对数据融合计算后给定的陀螺零位漂移数据进行预处理[6]。然后再以时间和温度为输入根据灰色 第30卷第6期 压 电 与 声 光 Vol.30No.62008年12月 PIEZO EL ECTECTRICS &ACOUSTOOPTICS Dec.2008
陀螺最小二乘法温度补偿
陀螺最小二乘法温度补 偿 GE GROUP system office room 【GEIHUA16H-GEIHUA GEIHUA8Q8-
基于MEMS姿态传感器温度补偿方法传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。硬件补偿方法主要是改变电路来达到补偿效果,但是这种方法会导致电路的复杂化,同时提高了成本。软件补偿方法主要有最小二乘法、BP 神经网络法、回归法等。从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。 1 姿态传感器的温度补偿原理 本文采用美国InvenSense 公司生产的ITG3205?三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。 传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。姿态传感器的温度补偿原理如框图1所示。 2 姿态传感器的温度补偿方法 在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即y = mx + n 的线性关系。通过最小二乘法进行线性拟合,可以得出参数m 和n 的值。
此时可以发现,在不同的温度下,所拟合出来的m和n 值是随温度的变化而变化的。在此情况下,必须找出温度分别与m 和n 之间的关系,为此同样可以根据最小二乘法再次进行曲线拟合,从而得出m 值与温度之间的关系。同理也可以得出n 与温度之间的关系。经过两次曲线拟合之后,可以得出理论值与输出值之间的误差有了明显的减小,并且满足预期的要求。在实际应用中,为了达到高精度检测的要求,可以通过测量多组数据进行曲线拟合的方法来实现。 3 姿态传感器的实验数据处理 由于各轴的检测原理是相同的,因此本论文采用x轴的检测数据进行实验验证。主要的实验仪器有被测姿态传感器、经纬仪、高低恒温箱、高精度角度检测仪等。表1所得数据是未经温度补偿时的实验数据,即原始数据。 3.1 第一次线性拟合 由于按照最小二乘法的基本步骤进行拟合的计算量比较大,所以本文采用Matlab进行数据处理,这样不但可以减少复杂的计算过程,而且还可以保证较高的计算精度。 例如在温度T=-30 °C的条件下,以理论角度x 为自变量,输出角度y 为因变量,根据线性关系式y = mx + n ,计算出参数m 和n的值。具体计算程序如下: 拟合图像如下图2所示。 依次求出不同温度下参数m 和n 的值,计算结果如表2所示。