机械传动系统数字化设计与分析综合实验实验报告
机械传动系统数字化设计与综合分析实验
开课实验室:材料楼408 2012 年5月21 日
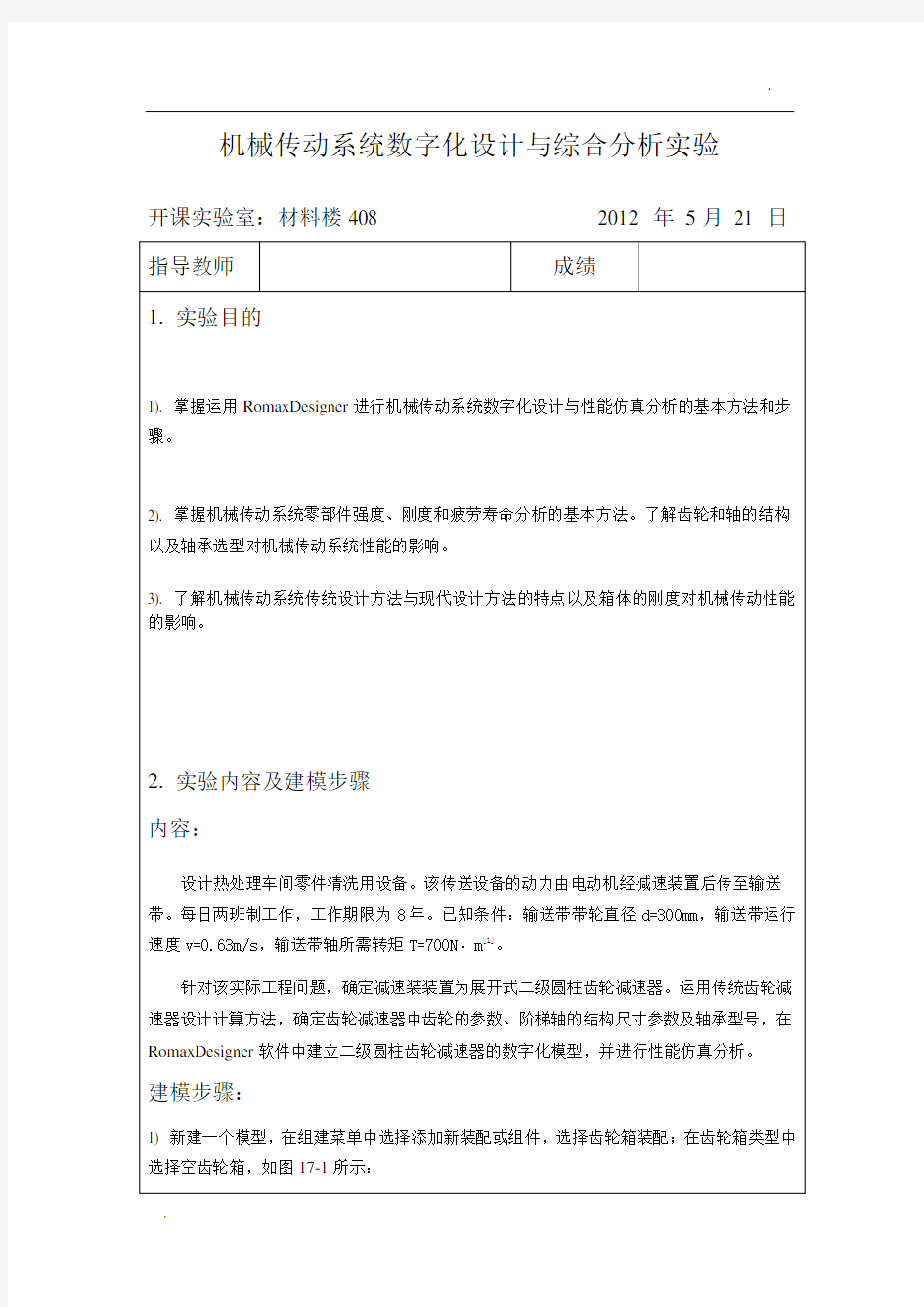
图17-1 空齿轮箱装配图
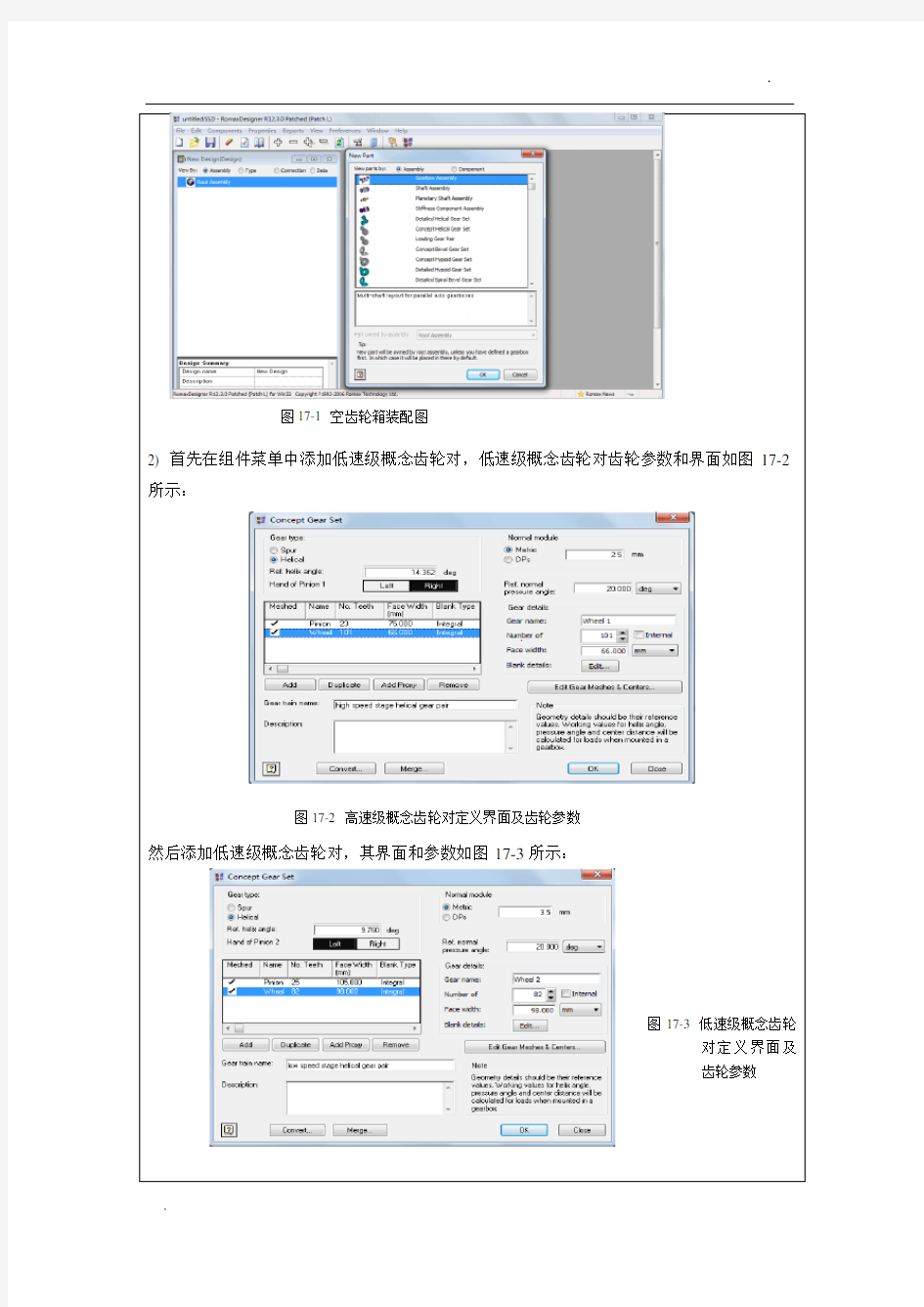
2) 首先在组件菜单中添加低速级概念齿轮对,低速级概念齿轮对齿轮参数和界面如图17-2所示:
图17-2 高速级概念齿轮对定义界面及齿轮参数
然后添加低速级概念齿轮对,其界面和参数如图17-3所示:
图17-3 低速级概念齿轮
对定义界面及
齿轮参数
3)在组件菜单中定义轴装配,首先运用如图17-4所示的轴结构尺寸参数生成高速级阶梯轴。
图17-4 高速轴结构参数表
在高速轴上添加高速级概念齿轮对的小齿轮和角接触球轴承7208B,添加轴承的界面如图17-5所示:
图17-5 轴承添加界面
在高速轴最小直径处添加功率载荷,生成高速轴装配如图17-6所示:
图17-6 高速轴装配图
其次,运用如图17-7所示的中间轴结构参数生成中间轴。
图17-7 中间轴结构参数表
在中间轴上添加高速级大齿轮和低速级小齿轮,并添加角接触球轴承7210B,生成如图17-8所示的中间轴装配。
图17-8 中间轴装配图
最后,运用图17-9所示的低速轴结构尺寸生成低速轴。
图17-9 低速轴结构参数表
在低速轴上添加低速级大齿轮、角接触球轴承7212B和功率载荷,生成低速轴装配如图17-10所示:
图17-10 低速轴装配图
4)把高速轴在空齿轮箱原点进行定位,中间轴和低速轴在空齿轮箱中的定位参数分别如图17-11和图17-12所示,完全定位后生成的齿轮箱模型如图17-13所示。
图17-11 中间轴定位界面及参数表图17-12 低速轴定位界面及参数表
图17-13 齿轮箱模型图
5)定义工况,工作时间46720小时,润滑油温度控制在70℃以下,电动机输入功率4000W,满载转速1440rpm,工况定义界面如图17-14所示。经过以上步骤,则完成了齿轮箱模型。
图17-14 工况定义界面
3.实验结果及分析输出轴受力:
输入轴受力:
中间轴受力:
机械设计实验报告
前言 一、实验课目的 本课程实验课目的在于:验证、巩固和加深课堂讲授的基本理论,加强理论联系实际及独立工作能力的培养;掌握一些最基本的机械实验方法、测量技能及用实验法来测定一些机械参数的能力;以及培养学生踏实细致、严肃认真的科学作风。因此,实验课是一个不可缺少的重要环节,每个学生必须认真对待,在课前进行预习,在课后分析试验结果,写成正规的实验报告。实验课为评定学生成绩的一部分。 二、实验前的准备工作 为了保证实验顺利进行,要求在实验前做好准备工作,教师在实验前要进行检查和提问,如发现有不合格者,提出批评,甚至停止实验的进行,实验准备工作包括下列几方面内容: 1.预习好实验指导书:明确实验的目的及要求;搞懂实验的原理;了解实验进行的步骤及主要事项,做到心中有底。 2.准备好实验指导书中规定自带的工具、纸张。 3.准备好实验数据记录表格。表格应记录些什么数据自拟。 三、遵守实验室的规章制度 1.验前必须了解实验设备、仪器的使用性能、操作规程及使用须知,否则不得操作。 2.严格按照规定,精心操作设备、仪器。 3.实验室内与本实验无关的设备与仪器,一律不得乱动。 4.在实验室严守纪律,不得高声谈笑,保持室内整洁。 5.实验完毕后,用过设备、仪器放回原处,并整理清洁、经教师同意后才得离开。 四、实验报告 实验报告是对实验所有数据、现象进行整理,分析得出一定结论与看法的书面文件。学生在实验后必须按照要求,整理并分析处理所的结果,写成正规的实验报告。 为了写好实验报告,提出以下几点: 1.实验结果记录应经实验指导教师过目签字,并随实验报告一起交上。 2.报告中的结果分析及讨论应力求具体,应针对试验具体情况,防止不切实际的空谈。 3.实验报告要求每人一份。 4.实验报告应在实验完毕后一星期内,由班委汇集交老师。 吉林大学珠海学院 机械工程学院 2018年9月10日
《管理信息系统》课程设计实验报告
《管理信息系统》课程设计实验报告 课程名称:管理信息系统 指导老师: ******* 院系:商学院 专业班级: ******** 姓名: ******** 学号: ******** 实验日期: 2011.7.11 实验地点:一机房
《管理信息系统》课程设计任务书 一.课程设计目的及意义: 《管理信息系统》课程设计是在完成《管理信息系统》课程学习之后的一次实践性教 学,是本课程理论知识的一次综合运用。通过本课程设计,能够进一步加深对信息、信息系 统、管理信息系统等基础理论知识的理解,能初步掌握结构化的生命周期法、面向对象法等 系统工程方法,进一步加强熟练应用管理信息系统的操作技能,并能够借助于管理信息系统 解决实际问题。 二.课程设计要求: 1.本课程设计时间为一周。 2.本课程设计以教学班为单位进行上机操作及实验。 3.按照任务要求完成课程设计内容。 三.课程设计任务要求: 1.任务内容:进入山东轻工业学院主页,在“网络资源”区域进入“网络教学平台”,输入各自的用户名和密码(学生学号及密码),进入本网络教学平台系统,在充分熟悉本系统 的前提下,完成下列任务要求。 2.任务要求: ①按照课程讲解的系统分析步骤和理论对本系统进行系统分析。 ②绘制不少于 3 个的主要业务流程图。 ③描述上述主要业务流程图的逻辑处理功能。 ④分析本系统的优缺点,提出改进意见,并描述改进的逻辑处理功能,绘制业务流 程图。 四.课程设计评分标准: 按照《管理信息系统课程设计大纲》的要求,本课程 1 学分,采用百分制计分,其中 任务要求②占30 分,任务要求③占30 分,任务要求④占30 分,考勤及实践表现占10 分。五.本课程设计自2011 年 6 月 27 日至 2011 年 7 月 1 日。
太原理工机械系统设计实验报告
《机械系统设计》 实验报告 姓名:马睿聪 班级:机械Z1317 学号:2013000384
实验一:采煤机的主功能及辅助功能 采煤机是一个集机械、电气和液压为一体的大型复杂系统,工作环境恶劣,如果出现故障将会导致整个采煤工作的中断,造成巨大的经济损失. 采煤机是实现煤矿生产机械化和现代化的重要设备之一.机械化采煤可以减轻体力劳动、提高安全性,达到高产量、高效率、低消耗的目的. 采煤机分锯削式、刨削式、钻削式和铣削式四种:采煤机是一个集机械、电气和液压为一体的大型复杂系统,工作环境恶劣,如果出现故障将会导致整个采煤工作的中断,造成巨大的经济损失.随着煤炭工业的发展,采煤机的功能越来越多,其自身的结构、组成愈加复杂,因而发生故障的原因也随之复杂.双滚筒采煤机综合了国内外薄煤层采煤机的成功经验,是针对我国具体国情而设计的新型大功率薄煤层采煤机. 采煤机的主要组成部分: 采煤机的类型很多,但基本上以双滚筒采煤机为主,其基本组成部分也大体相同。各种类型的采煤机一般都由下列部分组成。 (1)截割部 截割部的主要功能是完成采煤工作面的截煤和装煤,由左、右截割电机,左、右摇臂减速箱,左、右滚筒,冷却系统,内喷雾系统和弧形挡板等组成。截割部耗能占采煤机装机总功率的80%-90%,
因此,研制生产效率高和比能耗低的采煤机主要体现在截割部。 传动装置: 截割部传动装置的作用是将采煤机电动机的动力传递到滚筒上,以满足滚筒转速及转矩的要求;同时,还应具有调高功能,以适应不同煤层厚度的变化。 截割部的传动方式主要有一下几种: a)、电动机-摇臂减速箱-行星齿轮减速箱-滚筒 b)、电动机-固定减速箱-摇臂减速箱-滚筒 c)、电动机-固定减速箱-摇臂减速箱-行星齿轮减速箱-滚筒 d)、电动机-摇臂减速箱-滚筒螺旋滚筒: 螺旋滚筒是采煤机落煤和装煤的工作机构,对采煤机工作起决定性作用,消耗总装功机率的80%-90%。早期的螺旋滚筒为鼓型滚筒,现代采煤机都采用螺旋滚筒。螺旋滚筒能适应煤层的地质条件和先进的采煤方法及采煤工艺的要求,具有落煤、装煤、自开切口的功能。近些年来出现了一些新的截割滚筒,诸如滚刀式滚筒、直
《机械设计基础》实验报告
. 广西科技大学鹿山学院 实验报告 课程名称: 指导教师: 班级: 姓名: 学号: 成绩评定: 指导教师签字: 年月日
实验一机构运动简图的测绘与分析 一、实验目的: 1、根据各种机械实物或模型,绘制机构运动简图; 2、学会分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自 由度的计算方法; 3、加深对机构结构分析的了解。 二、实验设备和工具; 1、缝纫机头; 2.学生自带三角板、铅笔、橡皮; 三、实验原理: 由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略符号(见教科书有关“常用构件和运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
四、实验步骤及方法: l、测绘时使被测绘的机械缓慢地运动,从原动件开始,仔细观察机构的运动,分清各个运动单元,从而确定组成机构的构件数目; 2、根据相联接的两构件的接触特征及相对运动的性质,确定各个运动副的种 类; 3、选定投影面,即多数构件运动的平面,在草稿纸上徒手按规定的符号及构 件的连接次序,从原动件开始,逐步画出机构运动简图。用数字1、2、 3、……。分别标注各构件,用英文字母A、B、C、,……分别标注各运动副; 4、仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动副导路的方 向等,选定原动件的位置,并按一定的比例画出正式的机构运动简图。 五、实验要求: l、对要测绘的缝纫机头中四个机构即a.压布、b走针、c.摆梭、d.送布,只绘出机构示意图即可,所谓机构运动示意图是指只凭目测,使图与实物成比例,不按比例尺绘制的简图; 2、计算每个机构的机构自由度,并将结果与实际机构的自由度相对照,观察计 算结果与实际是否相符; 3、对绘制的机构进行结构分析(高副低代,分离杆组;确定机构级别等)。 六、思考题:
机械专业实训报告三篇
机械专业实训报告三篇 篇一 一、实习目的 深入生产第一线进行观察和调查研究,获取必要的感性知识和使自己全面地了解机床厂的生产组织形式以及生产过程,了解和掌握本专业基础的生产实际知识,巩固和加深已学过的理论知识。通过对典型零件机械加工工艺的分析,以及零件加工过程中所用的机床,夹具、量具等工艺装备,把理论知识和实践相结合起来,让我们的考察,分析和解决问题的工作能力得到有效的提高。 二、实习要求 根据实习工厂的产品,选定几种典型零件作为实习对象,通过对典型零件机械加工工艺的学习,掌握各类机器零件加工工艺的特点,了解工艺在工厂中所用的机床,刀具,夹具的工作原理和机构以及定位方式。 三、实习安排 (1):第一周了解车间及工件大体情况 (2):第一周分析万能摇臂铣床六大件的加工工艺 四、实习内容 在机床上加工工件时,必须用夹具装好夹牢工件。将工件装好,就是在机床上确定工件相对于刀具的正确位置,这一过程称为定位。将工件夹牢,就是对工件施加作用力,使之在已经定好的位置上将工件可靠地夹紧,这一过程称为夹紧。从定位到夹紧的全过程,称为装夹。 装夹方法有找正装夹法和夹具装夹法两种。找正装夹方法是以工件的有关表面或专门划出的线痕作为找正依据,用划针或指示表进行找正,将工件正确定位,然后将工件夹用虎钳中,按侧边划出的加工线痕,用划针找正。夹紧的目的是防止工件在切削力、重力、惯性力等的作用下发生位移或振动,以免破坏工件的定位。性能。 工件在夹具中定位的任务是:使同一工序中的一批工件都能在夹具中占据正确的位置。工件定位的实质就是要限制对加工有影响的自由度。 五、实习总结
十天的参观实习结束了,在这期间我们在公司进行参观实习,在老师和工厂技术人员的带领下看到了很多也学到了很多。让我对原先在课本上许多不很明白的东西在实践观察中有了新的领悟和认识。在这个科技时代中,高技术产品品种类繁多,生产工艺、生产流程也各不相同,但不管何种产品,从原料加工到制成产品都是遵循一定的生产原理,通过一些主要设备及工艺流程来完成的。因此,在专业实习过程中,首先要了解其生产原理,弄清生产的工艺流程和主要设备的构造及操作。其次,在专业人员指导下,通过实习过程见习产品的设计、生产及开发等环节,初步培养我们得知识运用能力。 经过培训我的工作能力得到了相应的提高。本次实习使我第一次亲身感受了所学知识与实际的应用,理论与实际的相结合,让我们大开眼界,也算是对以前所学知识的一个初审吧!这次参观实习对于我们以后学习、找工作也真是受益菲浅。同时,也使我体验到了工作的艰辛,整个参观过程,我们从粗加工到精加工,从小型机床到大型机床。我充分的体会到了一个机械产品,从无到有的整个过程,第一次感受到了机械这个专业带给我的震撼和感悟。 篇二 通过在xx市xx机床厂生产实习,深入生产第一线进行观察和调查研究,获取必要的感性知识和使自己全面地了解xx机床厂的生产组织形式以及生产过程,了解和掌握本专 业基础的生产实际知识,巩固和加深已学过的理论知识,并为后续专业课的教学,课程设计,毕业设计打下坚实的基础。 1.在实习期间,通过对典型零件机械加工工艺的分析,以及零件加工过程中所用的机床,夹具、量具等工艺装备,把理论知识和实践相结合起来,让我们的考察,分析和解决问题的工作能力得到有效的提高。 2.通过实习,广泛接触工人和听工人技术人员的专题报告,学习他们的好的增产经验,技术革新和成果,实践中的经验,学习他们在机械行中的无私贡献精神。 3.通过参观xx机床厂,掌握一台机床从毛坯到产品的整个生产过程,组织管理,设 备选择和车间布置等方面的知识,扩大知识面,开阔了视野。 4.通过记实习日记,写实习报告,锻炼与培养我们的观察,分析问题以及搜集和整理技术资料等方面的能力。 一、生产实习的要求 为了达到上述实习目的,生产实习的内容和要求有: 1.机械零件的加工
系统设计实验报告
系统设计实验报告——远程在线考试系统
目录软件需求说明书························1 引言··························· 1.1编写目的······················· 1.2背景························· 1.3定义························· 1.4参考资料······················· 2 程序系统的结构························ 3 程序设计说明·························
1引言 1.1编写目的 本文档的编写目的是为远程在线考试系统项目的设计提供: a.系统的结构、设计说明; b.程序设计说明; c. 程序(标识符)设计说明 1.2背景 随着网络技术的飞速发展,现在很多的大学及社会上其它的培训部门都已经开设了远程教育,并通过计算机网络实现异地教育。但是,远程教育软件的开发,就目前来说,还是处于起步的阶段。因此,构建一个远程在线考试系统,还是有很大的实际意义的。 根据用户提出的需求,本项目组承接该系统的开发工作 a.开发软件系统的名称:远程在线考试系统 b.本项目的任务提出者:福州大学软件学院 c.用户:各类大专院校学校、中小学校。 1.3定义 远程在线考试系统 远程在线考试系统是基于用Browser/Web模式下的,可以实现考试题库管理、多用户在线考试、自动阅卷功能的系统。
1.4参考资料 ?GB 8566 计算机软件开发规范 ?GB 8567 计算机软件产品开发文件编制指南?软件设计标准
有限元分析实验报告
武汉理工大学 学生实验报告书 实验课程名称机械中的有限单元分析 开课学院机电工程学院 指导老师姓名 学生姓名 学生专业班级机电研 1502班 2015—2016 学年第2学期
实验一方形截面悬臂梁的弯曲的应力与变形分析 钢制方形悬臂梁左端固联在墙壁,另一端悬空。工作时对梁右端施加垂直向下的30KN的载荷与60kN的载荷,分析两种集中力作用下该悬臂梁的应力与应变,其中梁的尺寸为10mmX10mmX100mm的方形梁。 1.1方形截面悬臂梁模型建立 建模环境:DesignModeler 15.0。 定义计算类型:选择为结构分析。 定义材料属性:弹性模量为2.1Gpa,泊松比为0.3。 建立悬臂式连接环模型。 (1)绘制方形截面草图:在DesignModeler中定义XY平面为视图平面,并正视改平面,点击sketching下的矩形图标,在视图中绘制10mmX10mm的矩形。(2)拉伸:沿着Z方向将上一步得到的矩阵拉伸100mm,即可得到梁的三维模型,建模完毕,模型如下图1.1所示。 图1.1 方形截面梁模型 1.2 定义单元类型: 选用6面体20节点186号结构单元。 网格划分:通过选定边界和整体结构,在边界单元划分数量不变的情况下,通过分别改变节点数和载荷大小,对同一结构进行分析,划分网格如下图1.2所示:
图1.2 网格划分 1.21 定义边界条件并求解 本次实验中,讲梁的左端固定,将载荷施加在右端,施以垂直向下的集中力,集中力的大小为30kN观察变形情况,再将力改为50kN,观察变形情况,给出应力应变云图,并分析。 (1)给左端施加固定约束; (2)给悬臂梁右端施加垂直向下的集中力; 1.22定义边界条件如图1.3所示: 图1.3 定义边界条件 1.23 应力分布如下图1.4所示: 定义完边界条件之后进行求解。
《机械设计基础》本科实验报告汇总
实验一:平面机构认知实验 一、实验目的和要求 目的:通过观察机械原理陈列柜,认知各种常见运动副的组成及结构特点,认知各类常见机构分类、组成、运动特性及应用。加深对本课程学习内容及研究对象的了解。 要求:1、认真观察陈列柜,仔细揣摩分析 2、结合有关的实验展柜和教材的相关章节内容回答下列简答题,完成实验报告。 二、实验原理 分批地组织学生观看、听讲陈列柜的展出和演示。初步了解《机械设计基础》课程所研究的各种常用机构的结构、类型、组成、运动特性及应用。 三、主要仪器设备及材料 JY-10B型机械原理陈列柜,共10柜,有近80个常用机构。 四、试验方法与步骤 第1柜机构的组成 1 机构的组成:蒸汽机、内燃机 2 运动副模型:平面运动副、空间运动副。 第2柜平面连杆机构 1 铰链四杆机构三种形式:①曲柄摇杆机构;②双曲柄机构;③双摇杆机构 2 平面四杆机构的演化形式 ①对心曲柄滑块机构②偏置取冰滑块机构③正弦机构④偏心轮机构⑤双重偏心机构⑥直动滑杆机构⑦摇块机构⑧转动导杆机构⑨摆动导杆机构⑩双滑块机构 第3柜连杆机构的应用 1 鄂式破碎机、飞剪; 2 惯性筛; 3 摄影机平台、机车车轮联动机构; 4 鹤式起重机; 5 牛头刨床的主体机构; 6 插床模型。 第4柜空间连杆机构 RSSR 空间机构、4R 万向节、RRSRR机构、RCCR联轴节、RCRC揉面机构、SARRUT机构第5柜凸轮机构 盘形凸轮、移动凸轮、圆柱凸轮、圆锥凸轮、槽状凸轮、等宽凸轮、等径凸轮和主回凸轮等多种形式;移动和摆动从动件;尖顶、棍子和平底从动件等;空间凸轮机构 第6 柜齿轮机构类型 1 平行轴齿轮机构;2相交轴齿轮机构;3交错轴齿轮机构
机械零件有限元分析——实验报告
中南林业科技大学机械零件有限元分析 实验报告 专业:机械设计制造及其自动化 年级: 2013级 班级:机械一班 姓名:杨政 学号:20131461 I
一、实验目的 通过实验了解和掌握机械零件有限元分析的基本步骤;掌握在ANSYS 系统环境下,有限元模型的几何建模、单元属性的设置、有限元网格的划分、约束与载荷的施加、问题的求解、后处理及各种察看分析结果的方法。体会有限元分析方法的强大功能及其在机械设计领域中的作用。 二、实验内容 实验内容分为两个部分:一个是受内压作用的球体的有限元建模与分析,可从中学习如何处理轴对称问题的有限元求解;第二个是轴承座的实体建模、网格划分、加载、求解及后处理的综合练习,可以较全面地锻炼利用有限元分析软件对机械零件进行分析的能力。
实验一、受内压作用的球体的有限元建模与分析 对一承受均匀内压的空心球体进行线性静力学分析,球体承受的内压为 1.0×108Pa ,空 心球体的内径为 0.3m ,外径为 0.5m ,空心球体材料的属性:弹性模量 2.1×1011,泊松比 0.3。 承受内压:1.0×108 Pa 受均匀内压的球体计算分析模型(截面图) 1、进入 ANSYS →change the working directory into yours →input jobname: Sphere 2、选择单元类型 ANSYS Main Menu : Preprocessor →Element Type →Add/Edit/Delete →Add →select Solid Quad 4node 42 →OK (back to Element Types window)→ Options… →select K3: Axisymmetric →OK →Close (the Element Type window) 3、定义材料参数 ANSYS Main Menu : Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3→ OK 4、生成几何模型生成特征点 ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints →In Active CS →依次输入四个点的坐标:input :1(0.3,0),2(0.5,0),3(0,0.5),4(0,0.3)→OK 生成球体截面 ANSYS 命令菜单栏: Work Plane>Change Active CS to>Global Spherical ANSYS Main Menu: Preprocessor →Modeling →Create →Lines →In ActiveCoord → 依次连接 1,2,3,4 点生成 4 条线→OK Preprocessor →Modeling →Create →Areas →Arbitrary →By Lines →依次拾取四条线→OK ANSYS 命令菜单栏: Work Plane>Change Active CS to>Global Cartesian 5、网格划分 ANSYS Main Menu : Preprocessor →Meshing →Mesh Tool →(Size Controls) lines: Set
操作系统课程设计实验报告
河北大学工商学院 课程设计 题目:操作系统课程设计 学部信息学部 学科门类电气信息 专业计算机 学号2011482370 姓名耿雪涛 指导教师朱亮 2013 年6月19日
主要内容 一、设计目的 通过模拟操作系统的实现,加深对操作系统工作原理理解,进一步了解操作系统的实现方法,并可练习合作完成系统的团队精神和提高程序设计能力。 二、设计思想 实现一个模拟操作系统,使用VB、VC、CB等windows环境下的程序设计语言,以借助这些语言环境来模拟硬件的一些并行工作。模拟采用多道程序设计方法的单用户操作系统,该操作系统包括进程管理、存储管理、设备管理、文件管理和用户接口四部分。 设计模板如下图: 注:本人主要涉及设备管理模块
三、设计要求 设备管理主要包括设备的分配和回收。 ⑴模拟系统中有A、B、C三种独占型设备,A设备1个,B设备2个,C设备2个。 ⑵采用死锁的预防方法来处理申请独占设备可能造成的死锁。 ⑶屏幕显示 注:屏幕显示要求包括:每个设备是否被使用,哪个进程在使用该设备,哪些进程在等待使用该设备。 设备管理模块详细设计 一、设备管理的任务 I/O设备是按照用户的请求,控制设备的各种操作,用于完成I/O 设备与内存之间的数据交换(包括设备的分配与回收,设备的驱动管理等),最终完成用户的I/O请求,并且I/O设备为用户提供了使用外部设备的接口,可以满足用户的需求。 二、设备管理函数的详细描述 1、检查设备是否可用(主要代码) public bool JudgeDevice(DeviceType type) { bool str = false; switch (type) { case DeviceType.a: {
心得体会 机械原理实验心得体会
机械原理实验心得体会 机械原理实验心得体会 机械原理课程设计心得体会 十几天的机械原理课程设计结束了,在这次实践的过程中学到了一些除技能以外的其他东西,领略到了别人在处理专业技能问题时显示出的优秀品质,更深切的体会到人与人之间的那种相互协调合作的机制,最重要的还是自己对一些问题的看法产生了良性的变化. 在社会这样一个大群体里面,沟通自然是为人处世的基本,如何协调彼此的关系值得我们去深思和体会.在实习设计当中依靠与被依靠对我的触及很大,有些人很有责任感,把这样一种事情当成是自己的重要任务,并为之付出了很大的努力,不断的思考自己所遇到的问题.而有些人则不以为然,总觉得自己的弱势…..其实在生活中这样的事情也是很多的,当我们面对很多问题的时候所采取的具体行动也是不同的,这当然也会影响我们的结果.很多时候问题的出现所期待我们的是一种解决问题的心态,而不是看我们过去的能力到底有多强,那是一种态度的端正和目的的明确,只有这样把自己身置于具体的问题之中,我们才能更好的解决问题. 在这种相互协调合作的过程中,口角的斗争在所难免,关键是我们如何的处理遇到的分歧,而不是一味的计较和埋怨.这不仅仅是在类似于这样的协调当中,生活中的很多事情都需要我们有这样的处理能力,面对分歧大家要消除误解,相互理解,增进了解,达到谅解…..也许很多问题没有想象中的那么复杂,关键还是看我们的心态,那种处理和解决分歧
的心态,因为毕竟我们的出发点都是很好的.课程设计也是一种学习同事优秀品质的过程,比如我组的纪超同学,人家的确有种耐得住寂寞的心态.确实他在学习上取得了很多傲人的成绩,但是我所赞赏的还是他追求的过程,当遇到问题的时候,那种斟酌的态度就值得我们每一位学习,人家是在用心造就自己的任务,而且孜孜不倦,追求卓越.我们过去有位老师说得好,有有些事情的产生只是有原因的,别人能在诸如学习上取得了不一般的成绩,那绝对不是侥幸或者巧合,那是自己付出劳动的成果的彰显,那是自己辛苦过程的体现.这种不断上进,认真一致的心态也必将导致一个人在生活和学习的各个方面做的很完美,有位那种追求的锲而不舍的过程是相同的,这就是一种优良的品质,它将指引着一个人意气风发,更好走好自己的每一步. 在今后的学习中,一定要戒骄戒躁,态度端正,虚心认真….要永远的记住一句话:态度决定一切. 一、温故而知新。课程设计发端之始,思绪全无,举步维艰,对于理论知识学习不够扎实的我深感“书到用时方恨少”,于是想起圣人之言“温故而知新”,便重拾教材与实验手册,对知识系统而全面进行了梳理,遇到难处先是苦思冥想再向同学请教,终于熟练掌握了基本理论知识,而且领悟诸多平时学 习难以理解掌握的较难知识,学会了如何思考的思维方式,找到了设计的灵感。二、思路即出路。当初没有思路,诚如举步维艰,茫茫大地,不见道路。在对理论知识梳理掌握之后,茅塞顿开,柳暗花明,思路如泉涌,高歌“条条大路通罗马”。顿悟,没有思路便无出路,
数控机床与编程实验报告
成绩: 数控机床与编程实验报告 课程数控机床与编程 专业机械设计制造及其自动化 学号2500100425 姓名龚尚庆 指导教师曾文健 机械与电子信息工程学部 2013年11 月23 日
一、实验目的 1、熟悉数控机床的典型结构组成和工作原理。掌握手工编程的步骤; 2、掌握数控加工仿真系统的操作流程。 二、实验内容 1、观看机械零件的数控加工生产现场; 2、演示手工编程的操作步骤; 3、演示FANUC系统的数控加工操作流程。 三、实验设备 1、华中数控系统的数控车床; 2、30系统的数控铣床; 3、FUNAC系统的数控床; 4、华中数控的镗床: 5、沈阳机床厂的数控加工中心; 6、各种普通的车床、铣床,龙门刨床 四、数控工艺分析 1、零件工艺分析 (1)零件图上尺寸数据的给出,应符合程序编制方便的原则。 1)、零件图上尺寸标注方法应适应数控加工的特点在数控加工零件图上,应以同一基准引注尺寸或直接给出坐标尺寸。 2)、构成零件轮廓的几何元素的条件应充分, 便于在手工编程时计算基点或节点坐标。 (2)零件各加工部位的结构工艺性应符合数控加工的特点。 1)、零件的内腔和外形最好采用统一的几何类型和尺寸。这样可以减少刀具规格和换 刀次数,使编程方便,生产效益提高。 2)、内槽圆角的大小决定着刀具直径的大小,因而内槽圆角半径不应过小。零件
工艺 性的好坏与被加工轮廓的高低、转接圆弧半径的大小等有关。 3)、零件铣削底平面时,槽底圆角半径r不应过大。 4)、应采用统一的基准定位。在数控加工中,若没有统一基准定位,会因工件的重新安装而导致加工后的两个面上轮廓位置及尺寸不协调现象。 因此要避免上述问题的产生, 保证两次装夹加工后其相对位置的准确性,应采用统一的基准定位。
有限元分析实验报告
学生学号1049721501301实验课成绩 武汉理工大学 学生实验报告书 实验课程名称机械中的有限单元分析机电工程学院开课学院 指导老师姓名
学生姓名 学生专业班级机电研1502班 学年第学期2016—20152 实验一方形截面悬臂梁的弯曲的应力与变形分析 钢制方形悬臂梁左端固联在墙壁,另一端悬空。工作时对梁右端施加垂直 向下的30KN的载荷与60kN的载荷,分析两种集中力作用下该悬臂梁的应力与应变,其中梁的尺寸为10mmX10mmX100mm的方形梁。 方形截面悬臂梁模型建立1.1 建模环境:DesignModeler15.0。 定义计算类型:选择为结构分析。 定义材料属性:弹性模量为 2.1Gpa,泊松比为0.3。 建立悬臂式连接环模型。 (1)绘制方形截面草图:在DesignModeler中定义XY平面为视图平面,并正 视改平面,点击sketching下的矩形图标,在视图中绘制10mmX10mm的矩形。 (2)拉伸:沿着Z方向将上一步得到的矩阵拉伸100mm,即可得到梁的三维模型,建模完毕,模型如下图 1.1所示。
图1.1方形截面梁模型 :定义单元类型1.2 选用6面体20节点186号结构单元。 网格划分:通过选定边界和整体结构,在边界单元划分数量不变的情况下,通过分别改变节点数和载荷大小,对同一结构进行分析,划分网格如下图 1.2
所示: 图1.2网格划分 1.21定义边界条件并求解 本次实验中,讲梁的左端固定,将载荷施加在右端,施以垂直向下的集中 力,集中力的大小为30kN观察变形情况,再将力改为50kN,观察变形情况,给出应力应变云图,并分析。 (1)给左端施加固定约束; (2)给悬臂梁右端施加垂直向下的集中力; 1.22定义边界条件如图1.3所示:
《机械设计基础》实验报告.
广西科技大学鹿山学院 实验报告 课程名称: 指导教师: 班级: 姓名: 学号: 成绩评定: 指导教师签字: 年月日
实验一机构运动简图的测绘与分析 一、实验目的: 1、根据各种机械实物或模型,绘制机构运动简图; 2、学会分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自 由度的计算方法; 3、加深对机构结构分析的了解。 二、实验设备和工具; 1、缝纫机头; 2.学生自带三角板、铅笔、橡皮; 三、实验原理: 由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略符号(见教科书有关“常用构件和运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。 四、实验步骤及方法: l、测绘时使被测绘的机械缓慢地运动,从原动件开始,仔细观察机构的运动,分清各个运动单元,从而确定组成机构的构件数目; 2、根据相联接的两构件的接触特征及相对运动的性质,确定各个运动副的种 类;
3、选定投影面,即多数构件运动的平面,在草稿纸上徒手按规定的符号及构 件的连接次序,从原动件开始,逐步画出机构运动简图。用数字1、2、 3、……。分别标注各构件,用英文字母A、B、C、,……分别标注各运动 副; 4、仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动副导路的方 向等,选定原动件的位置,并按一定的比例画出正式的机构运动简图。 五、实验要求: l、对要测绘的缝纫机头中四个机构即a.压布、b走针、c.摆梭、d.送布,只绘出机构示意图即可,所谓机构运动示意图是指只凭目测,使图与实物成比例,不按比例尺绘制的简图; 2、计算每个机构的机构自由度,并将结果与实际机构的自由度相对照,观察计 算结果与实际是否相符; 3、对绘制的机构进行结构分析(高副低代,分离杆组;确定机构级别等)。 六、思考题: 1、一个正确的机构运动简图应能说明哪些内容? 2、机构自由度的计算对测绘机构运动简图有何帮助?
心得体会 机械设计学实验心得体会
机械设计学实验心得体会 机械设计学实验心得体会 《机械设计学》实践教学机械创新设计实验报告 学生姓名:学号:班级: 题目: 小组组长: 年月日 机械创新设计实验 一、 实验目的 通过实验使学生能够以系统的观点去发掘机械产品设计的规律和特点,并培养学生的创新意识,使学生的综合素质得到提高。二、实验原理 系统设计方法。三、实验要求 分组(最好4~6人)或个人完成实验,独立完成实验报告。四、实验仪器设备 机械系统设计手册及相关参考书。五、实验类型、性质与学时 类型:综合、创新学时:6课时六、实验步骤 根据所学知识,提出一机械设备总体设计方案(参考题目附后),要求包含物料 流系统、能量流系统及信息流系统;分小组讨论并确定方案。七、实验报告
实验报告必须包含的内容: 1、引言:对所选课题进行资料收集,简单介绍类似系统或技术的国内外研究与应用现状; 2、描述系统的总功能、分功能; 3、分功能实现方案;3、绘制系统的功能结构图; 4、绘制系统的运动循环图; 5、绘制系统的总体设计草图; 题目一(适用于一组):载重车装载系统的开发 见教材P362《课外作业1》 题目二(适用于二组):讲义自动发放机见教材P363《课外作业3》题目四(适用于四组):比萨饼成形机见教材P365《课外作业7》 题目六(适用于六组):移动车载升降系统设计设计一个安装在一台卡车上的升降平台,要求如下: 1.收缩范围:距离车厢底部2米到8米; 2.收缩至2米时不影响卡车正常行驶; 3.升高至8米时能够保证在不大于10km/h的行使速度,加速度不大于0.5m/s2 的情况下安全作业; 4.平台顶部能承受30kg负荷。 要求设计移动平台(含驱动、制动、控制系统)题目八(适用于七组):布线装置见教材P364《课外作业4》 分组情况 1题目一魏绍超吴昊张健马耀军许晓蒙贺建博2题目二齐相宇杨荣耀
软件设计与体系结构实验报告
福建农林大学计算机与信息学院 实验报告 课程名称:软件设计与体系结构 姓名:陈宇翔 系:软件工程系 专业:软件工程 年级:2007 学号:070481024 指导教师:王李进 职称:讲师 2009年12月16日
实验项目列表
福建农林大学计算机与信息学院实验报告 学院:计算机与信息学院专业:软件工程系年级:2007 姓名:陈宇翔 学号:070481024 课程名称:软件设计与体系结构实验时间:2009-10-28 实验室田实验室312、313计算机号024 指导教师签字:成绩: 实验1:ACME软件体系结构描述语言应用 一、实验目的 1)掌握软件体系结构描述的概念 2)掌握应用ACMESTUDIO工具描述软件体系结构的基本操作 二、实验学时 2学时。 三、实验方法 由老师提供软件体系结构图形样板供学生参考,学生在样板的指导下修改图形,在老师的指导下进行软件体系结构描述。 四、实验环境 计算机及ACMESTUDIO。 五、实验内容 利用ACME语言定义软件体系结构风格,修改ACME代码,并进行风格测试。 六、实验操作步骤 一、导入Zip文档 建立的一个Acme Project,并且命名为AcmeLab2。如下图:
接着导入ZIP文档,导入完ZIP文档后显示的如下图: 二、修改风格 在AcmeLab2项目中,打开families下的TieredFam.acme.如下图: 修改组件外观 1. 在组件类型中,双击DataNodeT; 在其右边的编辑器中,将产生预览;选择Modify 按钮,将打开外观编辑器对话框。 2. 首先改变图形:找到Basic shape section,在Stock image dropdown menu中选 择Repository类型. 3. 在Color/Line Properties section修改填充颜色为深蓝色。 4. 在颜色对话框中选择深蓝色,并单击 [OK]. 5. 修改图形的边框颜色为绿色 7. 单击Label tab,在Font Settings section, 设置字体颜色为白色,单击[OK] 产生的图形如下图:
心得体会 机械原理直齿圆柱齿轮实验心得体会
机械原理直齿圆柱齿轮实验心得体会 机械原理直齿圆柱齿轮实验心得体会 《机械原理》实验班级 姓名机构运动简图测绘学号 一、实验目的: 1.学会运用构件及其运动副联接常用符号和机械中常用机构的简图符号,正确绘制出机构运动简图; 2.通过实验进一步理解机构运动简图的意义; 3.熟练掌握机构自由度的计算方法,学会判断运动链能否成为机构。 二、实验内容: 机构运动简图是用国家标准规定的简单符号和线条代表运动副和构件,并按一定的比例尺表示机构的运动尺寸,绘制出的表示机构的简明图形。不严格按比例绘制的简图称为机构示意图。在分析研究现有机械和构思设计新机械时都需要绘制机构运动简图。因此,我们必须熟练掌握正确绘制机构运动简图的方法。 1.绘制三个机构的运动简图,测绘对象:1)油泵――摆杆式油泵、摆块式油泵;2)冲床――滚子式、滑块式;3)插齿机――从曲柄开始到插齿刀;4)牛头刨床――从小齿轮开始画起。其中,1、2必做,3、4选其一。对于油泵,要对其进行必要的尺寸测量,然后按比例画出其机构简图;对其余机构则绘出机构示意图。2.计算所画机构的自由度,判断其能否成为机构? 3.在东6D座参观常用机构的电动模型,观察各机构的运动。
三、实验步骤: 1.分析机械的组成情况和运动情况:确定机械是由多少个构件组成?哪个是原动件和机架?哪部分是执行构件和传动部分? 2.沿着运动传递路线,分析两构件间相对运动的性质,以确定运动副的类型和数目;3.适当地选择运动简图的视图平面; 4.选择适当比例尺,绘制机构运动简图。在原动件上标出代表其转动方向的箭头,并从原动件起,按传动路线标出各构件的编号(1、2、3、······)和运动副的代号(A、B、C、······)。5.绘制完机构运动简图和计算其自由度后,由指导教师签字认可,方可离去。 四、注意事项: 1.上课时自带直尺、橡皮、铅笔和画草图用的白纸。 2.课堂上只要求画出各机构简图的草图,草图应画在自带的白纸上。 五、实验报告: 1.直接将报告填写在后面作业纸上。2.将课堂上所绘制的各机构简图的草图,按机械制图的要求画出正式的机构运动简图或机构示 意图。 3.计算机构自由度时应列出公式,并写明其活动构件数、各级运动副的数目。4.说明机构是否具有确定运动?为什么? 5.将有教师签字的草图附在实验报告后一同按时交上。 六、思考题: 1.在计算平面机构自由度时应注意哪些事项?2.机构运动简图与机构示意图的区别?
《机械设计基础》本科实验报告汇总
实验一:平面机构认知实验 一、实验目的与要求 目的:通过观察机械原理陈列柜,认知各种常见运动副的组成及结构特点,认知各类常见机构分类、组成、运动特性及应用。加深对本课程学习内容及研究对象的了解。 要求:1、认真观察陈列柜,仔细揣摩分析 2、结合有关的实验展柜与教材的相关章节内容回答下列简答题,完成实验报告。二、实验原理 分批地组织学生观瞧、听讲陈列柜的展出与演示。初步了解《机械设计基础》课程所研究的各种常用机构的结构、类型、组成、运动特性及应用。 三、主要仪器设备及材料 JY-10B型机械原理陈列柜,共10柜,有近80个常用机构。 四、试验方法与步骤 第1柜机构的组成 1 机构的组成:蒸汽机、内燃机 2 运动副模型:平面运动副、空间运动副。 第2柜平面连杆机构 1 铰链四杆机构三种形式:①曲柄摇杆机构;②双曲柄机构;③双摇杆机构 2 平面四杆机构的演化形式 ①对心曲柄滑块机构②偏置取冰滑块机构③正弦机构④偏心轮机构⑤双重偏心机构⑥直动滑杆机构⑦摇块机构⑧转动导杆机构⑨摆动导杆机构⑩双滑块机构 第3柜连杆机构的应用 1 鄂式破碎机、飞剪; 2 惯性筛; 3 摄影机平台、机车车轮联动机构; 4 鹤式起重机; 5 牛头刨床的主体机构; 6 插床模型。 第4柜空间连杆机构 RSSR 空间机构、4R 万向节、RRSRR机构、RCCR联轴节、RCRC揉面机构、SARRUT机构 第5柜凸轮机构 盘形凸轮、移动凸轮、圆柱凸轮、圆锥凸轮、槽状凸轮、等宽凸轮、等径凸轮与主回凸轮等多种形式;移动与摆动从动件;尖顶、棍子与平底从动件等;空间凸轮机构 第6 柜齿轮机构类型 1 平行轴齿轮机构;2相交轴齿轮机构;3交错轴齿轮机构
机械设计实验报告 修改版(赵扬)
机械设计基础(A2)实验报告 班级: 学号: 姓名: 沈阳理工大学
一.皮带传动实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 1.1.实验目的 1.2.实验机构造及测试原理 1.3.实验步骤 1.4.数据和曲线
二.齿轮传动效率实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 2.1.实验目的 2.2.实验机构及测试原理 2.3.实验步骤 2.4.数据和曲线
2.5.思考题 (1)T9-T1基本上为直线关系,为什么T9-η为曲线关系? (2)哪些因素影响齿轮传动的效率?加载力矩的测量中存在哪些误差? (3)提高齿轮传动效率的措施有哪些?
三.HS-A型液体动压轴承实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 3.1.实验目的 3.2.实验机构及测试原理 3.3.实验步骤 3.4.数据和曲线
操作系统课程设计实验报告proj2
操作系统课程设计报告 班级: 团队成员:
目录 ................................................................................................................ 错误!未定义书签。 一、实验要求:建立线程系统................................................................... 错误!未定义书签。 1.1Task 2.1实现文件系统调用 (3) 1.1.1题目要求 (3) 1.1.2题目分析与实现方案 (3) 1.1.3关键点与难点 (4) 1.1.4实现代码 (4) 1.2 Task 2.2 完成对多道程序的支持 (5) 1.2.1题目要求 (5) 1.2.2题目分析与实现方案 (5) 1.2.3关键点与难点 (6) 1.2.4实现代码 (7) 1.3 Task 2.3 实现系统调用 (7) 1.3.1题目要求 (7) 1.3.2题目分析与实现方案 (8) 1.3.3关键点与难点 (9) 1.3.4实现代码 (9) 1.4 Task 2.4 实现彩票调度 (10) 1.4.1题目要求 (10) 1.4.2题目分析与实现方案 (10) 1.4.3关键点与难点 (11) 1.4.4实现代码 (11) 二、测试结果............................................................................................ 2错误!未定义书签。