西安交大自动控制原理实验报告
自动控制原理实验报告
学院:
班级:
姓名:
学号:
西安交通大学实验报告
课程自动控制原理实验日期2014 年12月22 日专业班号交报告日期 2014 年 12月27日姓名学号
实验五直流电机转速控制系统设计
一、实验设备
1.硬件平台——NI ELVIS
2.软件工具——LabVIEW
二、实验任务
1.使用NI ELVIS可变电源提供的电源能力,驱动直流马达旋转,并通过改变电压改变
其运行速度;
2.通过光电开关测量马达转速;
3.通过编程将可变电源所控制的马达和转速计整合在一起,基于计算机实现一个转速自
动控制系统。
三、实验步骤
任务一:通过可变电源控制马达旋转
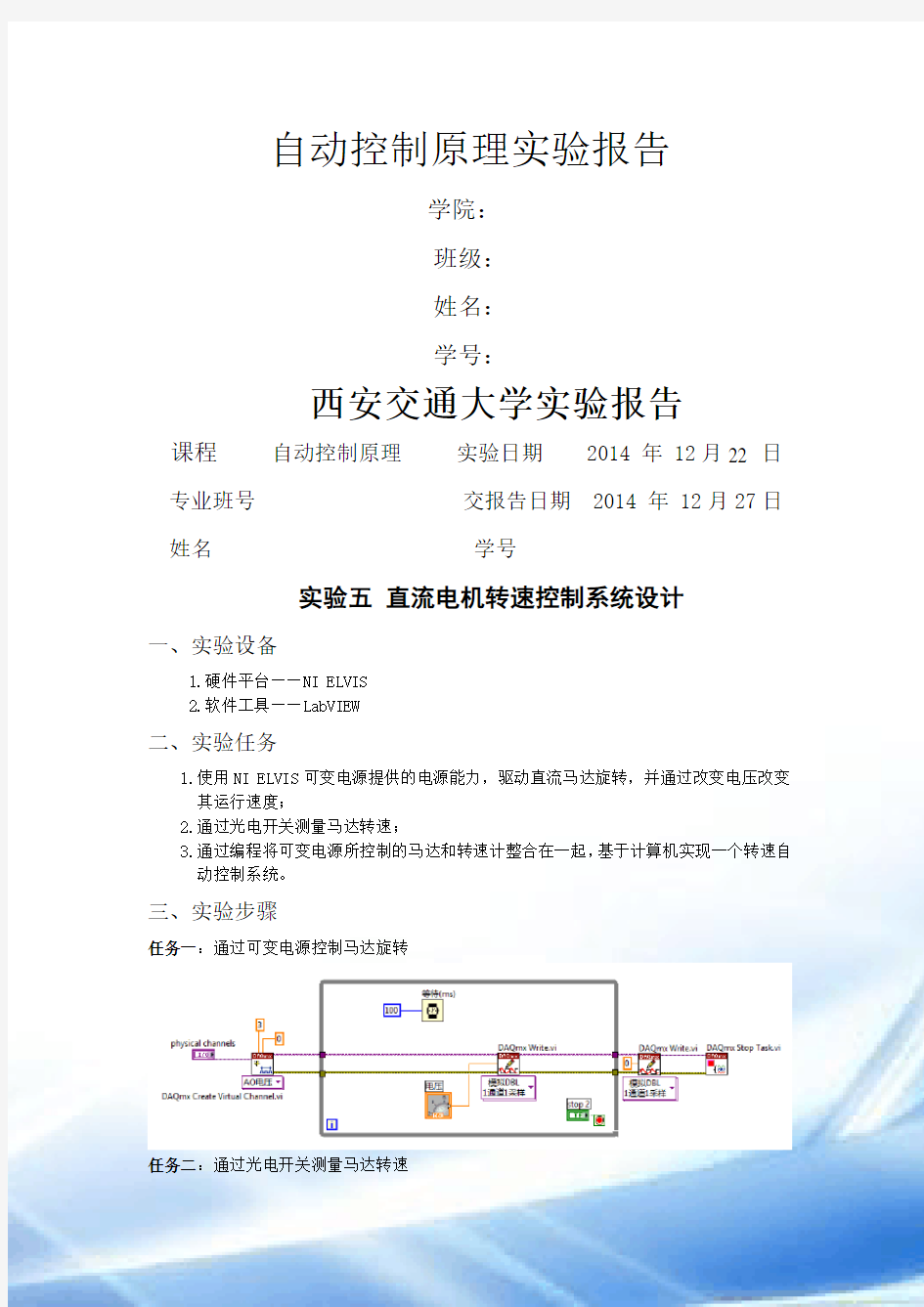
任务二:通过光电开关测量马达转速
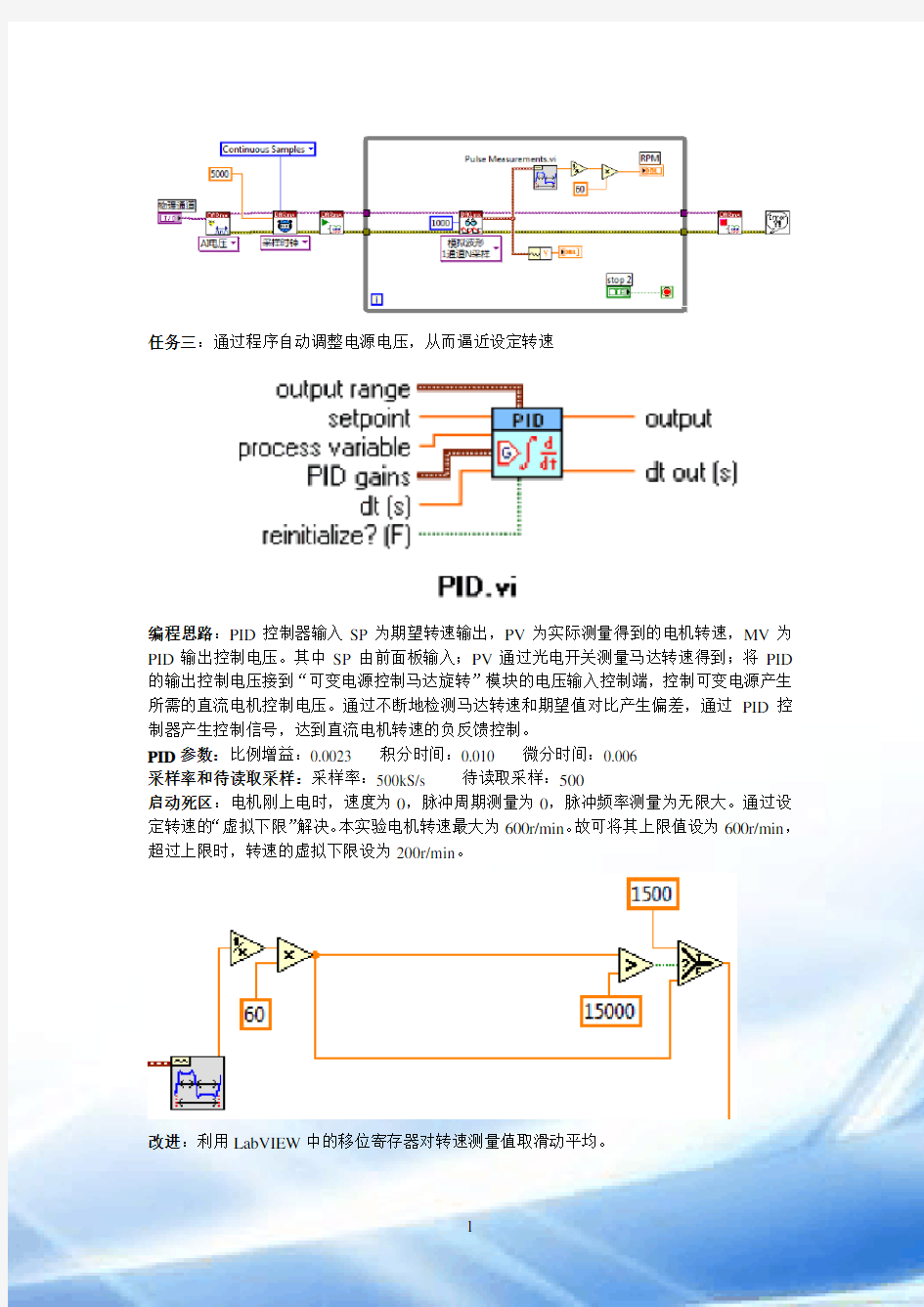
任务三:通过程序自动调整电源电压,从而逼近设定转速
编程思路:PID控制器输入SP为期望转速输出,PV为实际测量得到的电机转速,MV为PID输出控制电压。其中SP由前面板输入;PV通过光电开关测量马达转速得到;将PID 的输出控制电压接到“可变电源控制马达旋转”模块的电压输入控制端,控制可变电源产生所需的直流电机控制电压。通过不断地检测马达转速和期望值对比产生偏差,通过PID控制器产生控制信号,达到直流电机转速的负反馈控制。
PID参数:比例增益:0.0023 积分时间:0.010 微分时间:0.006
采样率和待读取采样:采样率:500kS/s 待读取采样:500
启动死区:电机刚上电时,速度为0,脉冲周期测量为0,脉冲频率测量为无限大。通过设定转速的“虚拟下限”解决。本实验电机转速最大为600r/min。故可将其上限值设为600r/min,超过上限时,转速的虚拟下限设为200r/min。
改进:利用LabVIEW中的移位寄存器对转速测量值取滑动平均。
四、实验截图
【程序框图】
未加移位寄存器:
加移位寄存器:
【程序运行结果】未加移位寄存器:
加移位寄存器:
五、实验总结
通过本次实验初步掌握了LABVIEW的编程方法,深刻体会到了LABVIEW作为一种基于数据流的图形化编程语言的强大之处,一定会继续深入学习LABVIEW。同时结合直流电机转速控制系统的设计进一步掌握了负反馈控制和PID控制器的使用方法,掌握了控制系统的设计方法。同时在本次实验中体会到了实际动手的快乐,理论结合实践。
西安交通大学接口技术实验报告
西安交通大学 微型计算机接口技术实验报告 班级:物联网 姓名: 学号:
实验一基本I/O扩展实验 一、实验目的 1、了解 TTL 芯片扩展简单 I/O 口的方法,掌握数据输入输出程序编制的方法; 2、对利用单片机进行 I/O 操作有一个初步体会。 二、实验内容 74LS244 是一种三态输出的8 总线缓冲驱动器,无锁存功能,当G 为低电平时,Ai 信号传送到Yi,当为高电平时,Yi 处于禁止高阻状态。 74LS273 是一种8D 触发器,当CLR 为高电平且CLK 端电平正跳变时,D0——D7 端数据被锁存到8D 触发器中。 实验原理图: 三、实验说明 利用74LS244 作为输入口,读取开关状态,并将此状态通过74LS273 再驱动发光二极管显示出来,连续运行程序,发光二极管显示开关状态。
四、实验流程图 五、实验连线 1、244的cs连接到CPU地址A15,Y7—Y0连接开关K1-K8; 2、273的CS连接到CPU地址A14,Q7-Q0连接到发光二极管L1-L8; 3、该模块的WR,RD连接CPU的WR,RD,数据线AD7-AD0,地址线A7-A0分别与CPU的数据线AD7-AD0,地址线A7-A0相连接。
六、程序源代码(略) 七、实验结果 通过开关K01 到K08 可以对应依次控制LED 灯的L1 到L8 ,即当将开关Ki 上拨时,对应的Li 被点亮,Ki 下拨时,对应的Li熄灭。 此外,如果将开关拨到AAH 时,将会产生LED 灯左移花样显示;如果开关拨到55H 时,将会产生LED 灯右移花样显示。 七、实验心得 通过本次实验,我了解了TTL 芯片扩展简单I/O 口的方法,同时也对数据输入输出程序编制的方法有一定的了解与掌握,对利用单片机进行I/O 操作有一个初步体会,实验使我对自己在课堂上学的理论知识更加理解,同时也锻炼了我的动手操作能力。
自动控制原理实验报告
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
西安交通大学 非线性电路实验报告
Duffing 方程及其在信号检测中的应用 李禹锋 (西安交通大学电力设备电气绝缘国家重点实验室,陕西西安710049) 摘要:在工程领域中,在噪声环境下对信号进行检测一直都是研究的重点课题。混沌理论表明一类混沌系统在一定条件下对小信号具有参数敏感性,同时对噪声具有免疫力,因此使得它在信号检测中非常具有发展潜力。为此,本文分析了Duffing 方程的动力学特性,研究了利用Duffing 方程来进行微弱信号检测的原理和过程,并在Matlab 平台下进行了仿真实验。结果表明,可以利用Duffing 方程在噪声背景下进行信号的检测。 关键词:混沌理论;信号检测; Duffing 方程;仿真研究 1 引言 在噪声背景中检测微弱的有用信号是工程应用中的一个重要内容,前人已经开展了大量的研究工作。传统的基于线性理论的信号检测方法由于对噪声背景下的输出信噪比难以提高而存在一定局限性,尤其在对强噪声背景下的微弱信号检测更是受到了限制。然而很多研究证明,利用“混沌振子对周期小信号具有敏感依赖性,而对噪声具有免疫性”的特点,从噪声背景中提取微弱的周期信号是一种行之有效的方法,引起了人们极大的兴趣[1]。 在众多的信号检测中,正弦或余弦信号的检测占有极其重要的地位,在许多领域中有着极其广泛的应用。本文采用余弦小信号作为检测对象,在Matlab 平台下,对Duffing 方程及其在信号检测中的应用进行了初步探讨。 2 基于Duffing 方程的信号检测 2.1 Duffing 方程的数学模型及分析 Duffing 方程已被证明是混沌系统,大量学者对其进行过许多研究,研究它的动力学行为可以揭示系统的各种性质。Duffing 系统所描述的非线性动力学系统表现出丰富的非线性动力学特性,目前已成为研究混沌现象的常用模型[2]。 霍尔姆斯型Duffing 方程为: 232()()cos()d x dx k x t x t t dt dt γω+-+=(1) 式中,cos()t γ为周期策动力;k 为阻尼比;-x (t )+x 3(t )为非线性恢复力[3]。其状态方程为: dx y dt =(2) 3cos()dy ky x x t dt γω=-+-+(3) 在k 固定的情况下,系统状态随γ的变化出现变化,具体分析如下: (1)当策动力γ为0时,计算得到相平面中结点为(0,0)和鞍点为(±1,0)。系统
自动控制原理重要公式
A . 阶跃 函数 斜坡函数 抛物线函数 脉冲函数 正弦函数 B.典型环节的传递函数 比例环节 惯性环节(非周期环节 ) 积分环节 微分环节 二阶振荡环节(二阶惯性环节) 延迟环节 C.环节间的连接 串联 并联 反馈开环传递函数= 前向通道传递函数= 负反馈闭环传递函数 正反馈闭环传递函数 D.梅逊增益公式 E.劳斯判据 劳斯表中第一列所有元素均大于零 s n a 0a 2a 4a 6…… s n-1a 1a 3a 5a 7…… s n-2b 1b 2b 3b 4…… s n-3c 1c 2c 3c 4…… ……… s 2f 1f 2 s 1g 1 s 0h 1 劳斯表中某一行的第一个元素为零而该行其它元素不为零,ε→0; 劳斯表中某一行的元素全为零。P(s)=2s 4+6s 2-8。 F.赫尔维茨判据 特征方程式的所有系数均大于零。 G. 误差传递函数 扰动信号的误差传递函数 I.二阶系统的时域响应: 其闭环传递函数为 或 系统的特征方程为0 2)(22=++=n n s s s D ωζω 特征根为1 ,221`-±-=ζωζωn n s 上升时间t r 其中 峰值时间t p 最大超调量M p 调整时间t s a.误差带范围为±5% b.误差带范围为±2% 振荡次数N J.频率特性: 还可表示为:G (jω)=p (ω)+jθ(ω) p (ω)——为G (jω)的实部,称为实频特性; θ(ω)——为G (jω)的虚部,称为虚频特性。 显然有: K.典型环节频率特性: 1.积分环节 ???? ???? ? =+===)()()()()()()(sin )()()(cos )()(2 2ωωθω?ωθωωω?ωωθω?ωωp arctg p A A A p s s G 1(=???≥<=000)(t A t t r K s R s C s G ==)()()(222 2)(n n n s s K s G ωζωω++=)()(1)()() ()(s H s G s G s R s C s -= =Φ22 22)() (n n n s s s R s C ωζωω++=1 21)()(22++= Ts s T s R s C ζ2 1ζωβ πωβπ--=-= n d r t n s t ζω3 =
西安交大数字图像处理第二次实验报告
数字图像处理第二次作业
摘要 本次报告主要记录第二次作业中的各项任务完成情况。本次作业以Matlab 2013为平台,结合matlab函数编程实现对lena.bmp,elain1.bmp图像文件的相关处理:1.分别得到了lena.bmp 512*512图像灰度级逐级递减8-1显示,2.计算得到lena.bmp图像的均值和方差,3.通过近邻、双线性和双三次插值法将lena.bmp zoom到2048*2048,4. 把lena和elain 图像分别进行水平shear(参数可设置为1.5,或者自行选择)和旋转30度,并采用用近邻、双线性和双三次插值法zoom到2048*2048。以上任务完成后均得到了预期的结果。 1.把lena 512*512图像灰度级逐级递减8-1显示 (1)实验原理: 给定的lena.bmp是一幅8位灰阶的图像,即有256个灰度色。则K位灰阶图像中某像素的灰度值k(x,y)(以阶色为基准)与原图同像素的灰度值v(x,y)(以256阶色为基准)的对应关系为: 式中floor函数为向下取整操作。取一确定k值,对原图进行上式运算即得降阶后的k位灰阶图像矩阵。 (2)实验方法 首先通过imread()函数读入lena.bmp得到图像的灰度矩阵I,上式对I矩阵进行灰度降阶运算,最后利用imshow()函数输出显示图像。对应源程序为img1.m。 (3)处理结果 8灰度级
7灰度级 6灰度级 5灰度级
4灰度级 3灰度级 2灰度级
1灰度级 (4)结果讨论: 由上图可以看出,在灰度级下降到5之前,肉眼几乎感觉不出降阶后图像发生的变化。但从灰度级4开始,肉眼明显能感觉到图像有稍许的不连续,在灰度缓变区常会出现一些几乎看不出来的非常细的山脊状结构。随着灰度阶数的继续下降,图像开始出现大片的伪轮廓,灰度级数越低,越不能将图像的细节刻画出来,最终的极端情况是退化为只有黑白两色的二值化图像。由此可以得出,图像采样的灰度阶数越高,灰度围越大,细节越丰富,肉眼看去更接近实际情况。 2.计算lena图像的均值方差 (1)实验原理 对分辨率为M*N的灰度图像,其均值和方差分别为: (2)实验方法 首先通过imread()函数读入图像文件到灰度矩阵I中,然后利用 mean2函数和std2函数计算灰度矩阵(即图像)的均值和标准差,再由标准差平方得到方差。对应源程序:img1.m (3)处理结果 均值me =99.0512,标准差st =52.8776,方差sf =2.7960e+03。 (4)结果分析 图像的均值可反应图像整体的明暗程度,而方差可以反应图像整体的对比度情况,方差越大,图像的对比度越大,可以显示的细节就越多。 3.把lena图像用近邻、双线性和双三次插值法zoom到2048*2048; (1)实验原理 图像插值就是利用已知邻近像素点的灰度值来产生未知像素点的灰度值,以便由原始图
自动控制原理实验报告
实验报告 课程名称:自动控制原理 实验项目:典型环节的时域相应 实验地点:自动控制实验室 实验日期:2017 年 3 月22 日 指导教师:乔学工 实验一典型环节的时域特性 一、实验目的 1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。对比差异,分析原因。 3.了解参数变化对典型环节动态特性的影响。 二、实验设备 PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。 三、实验原理及内容 下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。 1.比例环节 (P) (1)方框图 (2)传递函数: K S Ui S Uo =) () ( (3)阶跃响应:) 0()(≥=t K t U O 其中 01/R R K = (4)模拟电路图: (5) 理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。 ② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I) (1)方框图 (2)传递函数: TS S Ui S Uo 1 )()(= (3)阶跃响应: ) 0(1)(≥= t t T t Uo 其中 C R T 0= (4)模拟电路图 (5) 理想与实际阶跃响应曲线对照: ① 取R0 = 200K ;C = 1uF 。 ② 取R0 = 200K ;C = 2uF 。
1 Uo 0t Ui(t) Uo(t) 理想阶跃响应曲线 0.4s 1 Uo 0t Ui(t) Uo(t) 实测阶跃响应曲线 0.4s 10V 无穷 3.比例积分环节 (PI) (1)方框图: (2)传递函数: (3)阶跃响应: (4)模拟电路图: (5)理想与实际阶跃响应曲线对照: ①取 R0 = R1 = 200K;C = 1uF。 理想阶跃响应曲线实测阶跃响应曲线 ②取 R0=R1=200K;C=2uF。 K 1 + U i(S)+ U o(S) + Uo 10V U o(t) 2 U i(t ) 0 0 .2s t Uo 无穷 U o(t) 2 U i(t ) 0 0 .2s t
西 安 交 通 大 学 实 验 报 告 生物信息学
课程生物信息学实验名称核酸和蛋白质序列数据的使用系别实验日期: 专业班级组别交报告日期: 姓名学号报告退发:(订正、重做) 同组人无教师审批签字: 实验目的:了解常用的序列数据库,掌握基本的序列数据信息的查询方法。 实验步骤:在序列数据库中查找某条基因序列(insulin人的),通过相关一系列数据库的搜索、比对与结果解释 实验结果: 1.该基因的功能是? DNA结合、RNA结合、雄激素受体结合、酶结合、蛋白结合、转录激活活性、转录调控区的DNA结合、微管蛋白结合、泛素蛋白与连接酶结合、泛素蛋白连接酶的活性、提高泛素蛋白连接酶的活性、锌离子结合 3. 该蛋白质有没有保守的功能结构域 该蛋白质有保守的功能结构域。分别为cd00027(Location:1763 –1842 Blast Score: 107)cd00162(Location:23 –68 Blast Score: 134)pfam04873(Location:655 –978 Blast Score: 1301)pfam12820(Location:344 –507 Blast Score: 809)pfam13923(Location:20 –65 Blast Score: 135) 4. 该蛋白质的功能是怎样的? ①E3泛素蛋白连接酶,专门介导L YS-6'-联泛素链的形成,并通过促胞对DNA损伤的反应,在DNA修复中起着核心的作用;目前还不清楚是否也介导其他类型的泛素链形成。E3泛素蛋白连接酶的活性是其抑癌能必需的。②BARD1- BRCA1异源二聚体协调各种不同的细胞通路,如DNA损伤修复,泛素化和转录调控,以维持基因组稳定性。③调节中心体微核。 ④从G2到有丝分裂的正常细胞周期进程所必需的。⑤参与转录调控在DNA损伤反应中的P21。⑥为FANCD2靶向DNA损伤位点所需。⑦可以用作转录调控因子。⑧绑定到ACACA 和防止其去磷酸化,抑制脂质合成。 5. 该蛋白质的三级结构是什么?如果没有的话, 和它最相似的同源物的结构是什么样子的?给出 示意图。 该蛋白有三级结构,如图所示
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
西安交通大学实验报告
西安交通大学实验报告 课程_大学计算机_实验名称_检索绘图音频及图像处理_第页共页 系别_____ 能动学院___________ 实验日期年月日专业班级________________组别_____________ 实验报告日期年月日姓名________________学号_____________ 报告退发 ( 订正、重做 ) 同组人_________________________________ 教师审批签字 ●目标任务: 一. 信息检索 1.使用百度地图网站搜索西安交通大学南门到西安大唐芙蓉园的公交线路。(屏幕截图)2.在本校图书馆网站查找两门课程的教学参考书(屏幕截图)。 3.使用百度图片网站搜索有关“飞机”和“天空”的图片,各下载一张,并分别命名为:天空.jpg,飞机.jpg。 4.使用Ei检索,检索目前中国高速铁路(High-speed railway in China)相关的工程论文(屏幕截图) 二. 矢量图绘制 题目:使用Microsoft Office Visio 2010办公绘图软件,绘制流程图。 要求:参见实验教材p27,“四. 实验任务和要求”。 三.数字音频处理 题目:使用GoldWave音频处理软件,完成手机铃声制作 要求:从网上下载一个音乐文件,选取最喜爱的片段,将其保存成手机要求的音频格式(如MP3、WAV)作为手机铃声(存放为另一个音乐文件)。 结果:在实验报告中,粘贴两个音乐文件的属性对话框屏幕截图。(分析文件的大小与占用空间的不同) GoldWave软件存放地址: D:\计算机应用技术基础、ECAT.Software\ECAT-Software\GoldWave.rar 或从网上下载。 四.数字图像处理 题目:使用Photoshop软件进行“飞行编队”图像设计。 要求:参见实验教材p37,“四. 实验任务和要求”(1)飞行编队设计。 结果:将设计的“三角飞行编队图片”粘贴到实验报告中。 最后上传实验报告。 ●实验环境
北航自动控制原理实验报告(完整版)
自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3
系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3
自动控制原理简答题要点
三.名词解释 47、传递函数:传递函数是指在零初始条件下,系统输出量的拉式变换与系统输入量的拉式变换之比。 48、系统校正:为了使系统达到我们的要求,给系统加入特定的环节,使系统达到我们的要求,这个过程叫系统校正。 49、主导极点:如果系统闭环极点中有一个极点或一对复数极点据虚轴最近且附近没有其他闭环零点,则它在响应中起主导作用称为主导极点。 50、香农定理:要求离散频谱各分量不出现重叠,即要求采样角频率满足如下关系: ωs ≥2ωmax 。 51、状态转移矩阵:()At t e φ=,描述系统从某一初始时刻向任一时刻的转移。 52、峰值时间:系统输出超过稳态值达到第一个峰值所需的时间为峰值时间。 53、动态结构图:把系统中所有环节或元件的传递函数填在系统原理方块图的方块中,并把相应的输入、输出信号分别以拉氏变换来表示,从而得到的传递函数方块图就称为动态结构图。 54、根轨迹的渐近线:当开环极点数 n 大于开环零点数 m 时,系统有n-m 条根轨迹终止于 S 平面的无穷远处,且它们交于实轴上的一点,这 n-m 条根轨迹变化趋向的直线叫做根轨迹的渐近线。 55、脉冲传递函数:零初始条件下,输出离散时间信号的z 变换()C z 与输入离散信号的z 变换()R z 之比,即()()() C z G z R z =。 56、Nyquist 判据(或奈氏判据):当ω由-∞变化到+∞时, Nyquist 曲线(极坐标图)逆时针包围(-1,j0)点的圈数N ,等于系统G(s)H(s)位于s 右半平面的极点数P ,即N=P ,则闭环系统稳定;否则(N ≠P )闭环系统不稳定,且闭环系统位于s 右半平面的极点数Z 为:Z=∣P-N ∣ 57、程序控制系统: 输入信号是一个已知的函数,系统的控制过程按预定的程序进行,要求被控量能迅速准确地复现输入,这样的自动控制系统称为程序控制系统。 58、稳态误差:对单位负反馈系统,当时间t 趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。 59、尼柯尔斯图(Nichocls 图):将对数幅频特性和对数相频特性画在一个图上,即以(度)为线性分度的横轴,以 l(ω)=20lgA(ω)(db )为线性分度的纵轴,以ω为参变量绘制的φ(ω) 曲线,称为对数幅相频率特性,或称作尼柯尔斯图(Nichols 图) 60、零阶保持器:零阶保持器是将离散信号恢复到相应的连续信号的环节,它把采样时刻的采样值恒定不变地保持(或外推)到下一采样时刻。 61、状态反馈设系统方程为,x Ax Bu y cx =+=&,若对状态方程的输入量u 取u r Kx =-,则称状态反馈控制。 四.简答题
西安交通大学检测技术课内实验报告
西安交通大学 现代检测技术实验报告 实验一金属箔式应变片——电子秤实验 实验二霍尔传感器转速测量实验 实验三光电传感器转速测量实验 实验四E型热电偶测温实验 实验五E型热电偶冷端温度补偿实验
实验一 金属箔式应变片——电子秤实验 一、实验目的: 了解金属箔式应变片的应变效应,直流全桥工作原理和性能,了解电路的定标。 二、实验仪器: 应变传感器实验模块、托盘、砝码、数显电压表、±15V 、±4V 电源、万用表(自备)。 三、实验原理: 电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为 ε?=?k R R (1-1) 式中 R R ?为电阻丝电阻相对变化; k 为应变灵敏系数; l l ?= ε为电阻丝长度相对变化。 金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感组件。如图1-1所示,将四 个金属箔应变片分别贴在双孔悬臂梁式弹性体的上下两侧,弹性体受到压力发生形变,应变片随弹性体形变被拉伸,或被压缩。 图1-1 双孔悬臂梁式称重传感器结构图
图1-2 全桥面板接线图 全桥测量电路中,将受力性质相同的两只应变片接到电桥的对边,不同的接入邻边,如图3-1,当应变片初始值相等,变化量也相等时,其桥路输出 Uo=R R E ?? (3-1) 式中E 为电桥电源电压。 R R ?为电阻丝电阻相对变化; 式3-1表明,全桥输出灵敏度比半桥又提高了一倍,非线性误差得到进一步改善。 电子称实验原理同全桥测量原理,通过调节放大电路对电桥输出的放大倍数使电路输出电压值为重量的对应值,电压量纲(V )改为重量量纲(g )即成一台比较原始的电子称。 四、实验内容与步骤 1.应变传感器上的各应变片已分别接到应变传感器模块左上方的R1、R2、R3、R4上,可用万用表测量判别,R1=R2=R3=R4=350Ω。 2.差动放大器调零。从主控台接入±15V 电源,检查无误后,合上主控台电源开关,将差动放大器的输入端Ui 短接并与地短接,输出端Uo 2接数显电压表(选择2V 档)。将电位器Rw3调到增益最大位置(顺时针转到底),调节电位器Rw4使电压表显示为0V 。关闭主控台电源。(Rw3、
西南交大c实验报告
实验__8__实验报告 教学班级:_26_ 学生学号:_201_ 学生:_ _ 实验日期:__5.26___ 实验地点:_________(机房) 指导教师签名:__________ 实验成绩:___________ 一、实验目的 1.掌握对数值型一维数组的使用方法; 2.掌握对数组的插入、删除、修改、排序和查找等常用算法。 二、实验任务 1. 设有一批学生的程序设计课程的考试成绩(学生人数最多为N=100人,数据如下: (提示:可以建立三个一维数组来存放学生的数据,其中:学号为一个long类型的数组studentID,为一个string类型的数组name,成绩为一个int类型的数组grade)(1)由键盘获取学生人数n,要求学生人数n的取值围11到N-2; (2)由键盘获取学生的相关数据; (3)用选择排序法将学生的数据按学号进行升序排列并输出排序后的学生数据; 2. 在任务1的基础上,在学生数据中,完成以下任务: (1)键盘输入一个学生的学号,用折半查找法查找是否有该学生,若有该学生则输出该学生的所有信息,按如下格式输出: 学号程序设计成绩 2015112324 思德72 若没有该学生,则输出“查无此人”的信息。 (2)插入一个新学生的数据,要求插入后学生的数据任按学号升序排列。 ⒊在任务1的基础上,在学生数据中,完成以下任务: ⑴用选择排序法将学生数据按学生程序设计课程成绩降序排列。 ⑵键盘输入一个学生的学号和程序设计课程的新成绩,在学生数据中查找是否有该学生,若有该学生则用键盘输入的新成绩替换该学生的原成绩,否则输出“查无此人”的信息。 三、实验结果(源程序+ 注释)
西安交大自动控制原理实验报告
自动控制原理实验报告 学院: 班级: 姓名: 学号:
西安交通大学实验报告 课程自动控制原理实验日期2014 年12月22 日专业班号交报告日期 2014 年 12月27日姓名学号 实验五直流电机转速控制系统设计 一、实验设备 1.硬件平台——NI ELVIS 2.软件工具——LabVIEW 二、实验任务 1.使用NI ELVIS可变电源提供的电源能力,驱动直流马达旋转,并通过改变电压改变 其运行速度; 2.通过光电开关测量马达转速; 3.通过编程将可变电源所控制的马达和转速计整合在一起,基于计算机实现一个转速自 动控制系统。 三、实验步骤 任务一:通过可变电源控制马达旋转 任务二:通过光电开关测量马达转速 任务三:通过程序自动调整电源电压,从而逼近设定转速
编程思路:PID控制器输入SP为期望转速输出,PV为实际测量得到的电机转速,MV为PID输出控制电压。其中SP由前面板输入;PV通过光电开关测量马达转速得到;将PID 的输出控制电压接到“可变电源控制马达旋转”模块的电压输入控制端,控制可变电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,达到直流电机转速的负反馈控制。 PID参数:比例增益:0.0023 积分时间:0.010 微分时间:0.006 采样率和待读取采样:采样率:500kS/s 待读取采样:500 启动死区:电机刚上电时,速度为0,脉冲周期测量为0,脉冲频率测量为无限大。通过设定转速的“虚拟下限”解决。本实验电机转速最大为600r/min。故可将其上限值设为600r/min,超过上限时,转速的虚拟下限设为200r/min。 改进:利用LabVIEW中的移位寄存器对转速测量值取滑动平均。
西安交通大学电子线路设计实验报告
电子线路设计 实验报告 姓名: 班级:自动化 学号: 2015/12/10
PROTEL电子线路设计与仿真 一、实验目的 1、了解PROTEL电子线路设计软件的开发过程; 2、熟练使用PROTEL电子线路设计软件,会设计简单、常用的电子线路; 3、熟练掌握建立项目文件、建立原理图文件、绘制原理图、产生网络表、建立PCB 文件、绘制PCB线路图等基本技能;掌握绘制电路原理图的基本操作步骤和设计技 巧,掌握创建原理图元件的方法;理解PCB线路图参数设置的意义,掌握手动、自 动布局和布线的基本方法和设计技巧,掌握创建PCB元件的方法。 二、实验设备及编译环境 计算机一台,Protel DXP集成环境。 三、实验步骤 (1)建立项目文件 File->New design 设置工程名和存储路径后点击OK,进入下图界面。
(2)建立原理图文件 在Documents文件夹下,点击Schematic document创建原理图文件。 (3)绘制原理图 在库下有的元件直接添加到原理图中连线即可;对库中没有的元件需要自行创建,创建步骤如下: 1在Documents文件夹下,点击Schematic Library document创建原理图 库文件(Schematic library document); 2绘制元件边框和引脚,设置引脚名称和编号,然后添加至原理图中。 绘制元件8563 U2如图:
绘制好原理图后点击Tools->ERC检查无错误 绘制好的原理图如下: 最后对每个元件设置一个封装(Footprint): 电容C1,C2 二极管D7,D8
西安交大金融学实验报告
金融学实验报告 题目:《金融学》证券模拟交易实验报告 院系:经济与金融学院 2015年12月16日 【实验题目】 证券模拟交易 【实验目的】 通过选取股票进行模拟交易掌握基本的证券及证券市场知识。 理解证券价格走势的基本特征,价格走势与成交量之间的基本关系:通过对证券分析软件的使用了解证券分析软件基本功能和证券模拟交易系统的基本使用方法。 【理论基础】 运用财务知识对证券进行基本面的分析。 运用K线分析方法及成交量分析方法描述多空力量对比及变化趋势,进而判断证券价格走势。 运用移动平行线判断证券价格运行状态。 【实验要求】 利用模拟交易系统进行选股分析,并进行股票投资,验证对后市股价预测的准确性。 【实验方案与进度】 本次实验选取分析的股票是信维通信(300136)。利用大智慧证券分析系统和新浪财经网、和讯网、东方财富网等获取股价走势图等相关图表和数据。
在通过对证券分析方法的教材等进行系统地学习之后对股票进行技术面的分析,并结合技术分析,如:K线分析方法、成交量分析方法、主盘控制程度分析表、机构与散户资金对比表等,综合评定股票,预测股票在未来的走势。 【实验过程与步骤】 了解证券投资基础知识; 了解证券投资实践基础知识; 学会看盘,掌握证券投资软件操作; 运用炒股软件进行模拟交易,对股票进行基本面和技术面的分析,预测股票在未来的走势。 一、基本面分析 【公司及股票信息】
【宏观行情分析】 2015年,受益经济结构升级和企业转型,科技行业和ICT行业的估值不断提升。运营商投资进入后4G真空期,单纯网络升级的投资驱动逻辑难以为继,同时行业在网络、系统、业务三个层面也在发生深刻变化,新成长的方向已崭露头角。展望2016大通信行业,国家战略需求、反恐安防升级、网军建设将造就信息安全和专网的确定性成长;军改下的军用通信将受益于中国版C4ISR加速建设;ICT融合下,SDN/NFV、大数据技术将产生颠覆。维持行业“推荐”评级,建议把握有成长确定性的细分子行业,并采取自下而上的选股策略,重点推荐五条投资主线:信息安全和专网通信、军用通信、大数据、互联网转型和工业互联网、小公司大平台。 11月份结束,12月份来临,受新股IPO、美国加息预期等影响,短期市场可能会有所波动。但展望2016年,上游半导体整合并购不止,中游零组件创新不断,下游新终端产品持续推出,我们对电子行业保持乐观态度。整体来看,虽然今年半导体衰退压力较大,但明年资本支出看增显示出它们乐观态度,加上产业整合并购不断,半导体将继续精彩纷呈;电 子制造业受欧美先进制造和东南亚中低端制造的前后夹击,国内人力成本上升,加上企业对90后的管理更加困难,很多电子制造厂商都有意愿加强制造的自动化,预计未来两年电子制造自动化仍能保持较高景气。 【公司素质分析】 个股价值评估 公司地位 股本结构 ④公司战略 坚持大客户战略,业绩确定高增长 公司成长逻辑清晰:国际大客户基础+基于核心技术(+份额提升+产品线拓张=确定的高 速增长。公司始终坚持大客户战略,凭借射频技术、快速响应及出色的产品品质得到大客户认可,已经成为苹果、三星、索尼、华为、微软等国际大客户主力供应商,公司将持续跟随客户成长。 在此基础上,其产品在客户的份额不断提升。射频系列,以苹果为例,公司wifi天线在iPhone的份额提升至30-50%,与安费诺不相伯仲,此外也全面进入iPad、Mac等全系列产品线,我们估测苹果手机wifi天线年需求1-2亿美金,平板天线年需求6-7亿元美 金,Macbook天线年需求3-4亿美金,且从iphone7起手机WiFi天线数量大概率将翻倍;
自动控制原理实验报告73809
-150-100 -50 50 实验一 典型环节的模拟研究及阶跃响应分析 1、比例环节 可知比例环节的传递函数为一个常数: 当Kp 分别为0.5,1,2时,输入幅值为1.84的正向阶跃信号,理论上依次输出幅值为0.92,1.84,3.68的反向阶跃信号。实验中,输出信号依次为幅值为0.94,1.88,3.70的反向阶跃信号, 相对误差分别为1.8%,2.2%,0.2%. 在误差允许范围内可认为实际输出满足理论值。 2、 积分环节 积分环节传递函数为: (1)T=0.1(0.033)时,C=1μf (0.33μf ),利用MATLAB ,模拟阶跃信号输入下的输出信号如图: T=0.1 T=0.033 与实验测得波形比较可知,实际与理论值较为吻合,理论上T=0.033时的波形斜率近似为T=0.1时的三倍,实际上为8/2.6=3.08,在误差允许范围内可认为满足理论条件。 3、 惯性环节 i f i o R R U U -=TS 1 CS R 1Z Z U U i i f i 0-=-=-=15 20
惯性环节传递函数为: K = R f /R 1,T = R f C, (1) 保持K = R f /R 1 = 1不变,观测T = 0.1秒,0.01秒(既R 1 = 100K,C = 1μf , 0.1μf )时的输出波形。利用matlab 仿真得到理论波形如下: T=0.1时 t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3%,读数误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值 较为接近。 T=0.01时 t s (5%)理论值为30ms,实际测得t s =40ms 相对误差为:(40-30)/30=33.3% 由于ts 较小,所以读数时误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值较为接近 (2) 保持T = R f C = 0.1s 不变,分别观测K = 1,2时的输出波形。 K=1时波形即为(1)中T0.1时波形 K=2时,利用matlab 仿真得到如下结果: t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3% 读数误差较大 K 理论值为2,实验值4.30/2.28, 1 TS K )s (R )s (C +-=
-自动控制原理知识点汇总
-自动控制原理知识点汇总
————————————————————————————————作者:————————————————————————————————日期:
自动控制原理知识点总结 第一章 1.什么是自动控制?(填空) 自动控制:是指在无人直接参与的情况下,利用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。 2.自动控制系统的两种常用控制方式是什么?(填空) 开环控制和闭环控制 3.开环控制和闭环控制的概念? 开环控制:控制装置与受控对象之间只有顺向作用而无反向联系 特点:开环控制实施起来简单,但抗扰动能力较差,控制精度也不高。 闭环控制:控制装置与受控对象之间,不但有顺向作用,而且还有反向联系,既有被控量对被控过程的影响。 主要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。 掌握典型闭环控制系统的结构。开环控制和闭环控制各自的优缺点? (分析题:对一个实际的控制系统,能够参照下图画出其闭环控制方框图。) 4.控制系统的性能指标主要表现在哪三个方面?各自的定义?(填空或判断) (1)、稳定性:系统受到外作用后,其动态过程的振荡倾向和系统恢复平衡的能力 (2)、快速性:通过动态过程时间长短来表征的 e来表征的 (3)、准确性:有输入给定值与输入响应的终值之间的差值 ss 第二章 1.控制系统的数学模型有什么?(填空) 微分方程、传递函数、动态结构图、频率特性 2.了解微分方程的建立? (1)、确定系统的输入变量和输入变量 (2)、建立初始微分方程组。即根据各环节所遵循的基本物理规律,分别列写出相应的微分方程,并建立微分方程组 (3)、消除中间变量,将式子标准化。将与输入量有关的项写在方程式等号的右边,与输出量有关的项写在等号的左边 3.传递函数定义和性质?认真理解。(填空或选择) 传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变
微机原理实验报告西安交通大学
西安交通大学 电子信息与工程学院自动化科学与技术系微机原理与接口技术实验报告 实验名称:微机原理与接口技术 实验者姓名: XX 实验者学号:21105040XX 所在班级:自动化1X 报告完成日期:2014年1月12日
实验一 数据传送、算术运算、循环程序结构 1、实验目的 a)熟悉8086汇编语言源程序的框架结构,并掌握汇编语言程序的编写、汇 编、连接、执行的过程,并利用Turbo Debugger调试汇编程序。 b)熟悉8086指令系统的数据传送指令,掌握寻址方式。 c)熟悉8086指令系统的算术运算指令。掌握循环结构汇编语言程序的编制。 2、实验内容 教材P121,第14、15题。教材P195,第6题。教材P196,第12题。 3、具体实验 第一题(P121,第14题) 设有两个8个字节长的BCD码数据BCD1及BCD2。BCD1数以1000H为首地址在内存中顺序存放;BCD2数以2000H为首地址在内存中顺序存放。要求相加后结果顺序存放在以2000H为首地址 的内存区中(设结果BCD数仍 不超过8个字节长)。 a) 实验原理 考虑两个8个字节长的 BCD码相加,首先根据地址要 求将数据放在对应的地址单 元中,然后做加法,BCD码相 加要用到调整指令,结果才 为正确的BCD数 b) 程序框图
c) 程序源代码 DATAS SEGMENT ORG1000H BCD1 DB 01H,02H,03H,04H,05H,06H,07H,88H;起始地址为1000H ORG2000H BCD2 DB 11H,12H,13H,14H,15H,16H,17H,18H;起始地址为2000H DATAS ENDS CODES SEGMENT ASSUME CS:CODES,DS:DATAS START: MOV AX,DATAS MOV DS,AX MOV BX,0 MOV CX,8 ;设置循环次数8次 CLC ;清进位CF标志 AGAIN:MOV AL,[BX+1000H] ADC [BX+2000H],AL;结果放在2000H开始的单元内 DAA INC BX LOOP AGAIN;没完成则转AGAIN循环 MOV AH,4CH INT 21H CODES ENDS END START 运行: BCD1 DB 11H,12H,13H,14H,15H,16H,17H,18H BCD2 DB 21H,22H,23H,24H,25H,26H,27H,28H 结果如下:DS:2000H为首地址的连续八个字节单元中