《自动控制原理》实验报告(线性系统的根轨迹)
实验四 线性系统的根轨迹
一、实验目的
1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
基础知识及MATLAB 函数
根轨迹是指系统的某一参数从零变到无穷大时,特征方程的根在s 平面上的变化轨迹。这个参数一般选为开环系统的增益K 。课本中介绍的手工绘制根轨迹的方法,只能绘制根轨迹草图。而用MATLAB 可以方便地绘制精确的根轨迹图,并可观测参数变化对特征根位置的影响。
假设系统的对象模型可以表示为
n
n n n m m m m a s b s a s b s b s b s b K s KG s G ++++++++==--+-11111210)()(ΛΛ 系统的闭环特征方程可以写成: 0)(10=+s KG
对每一个K 的取值,我们可以得到一组系统的闭环极点。如果我们改变K 的数值,则可以得到一系列这样的极点集合。若将这些K 的取值下得出的极点位置按照各个分支连接起来,则可以得到一些描述系统闭环位置的曲线,这些曲线又称为系统的根轨迹。
1) 绘制系统的根轨迹rlocus ()
MATLAB 中绘制根轨迹的函数调用格式为:
rlocus(num,den) 开环增益k 的范围自动设定。
rlocus(num,den,k) 开环增益k 的范围人工设定。
rlocus(p,z) 依据开环零极点绘制根轨迹。
r=rlocus(num,den) 不作图,返回闭环根矩阵。
[r,k]=rlocus(num,den) 不作图,返回闭环根矩阵r 和对应的开环增益
向量k 。
其中,num,den 分别为系统开环传递函数的分子、分母多项式系数,按s 的降幂排列。K 为根轨迹增益,可设定增益范围。
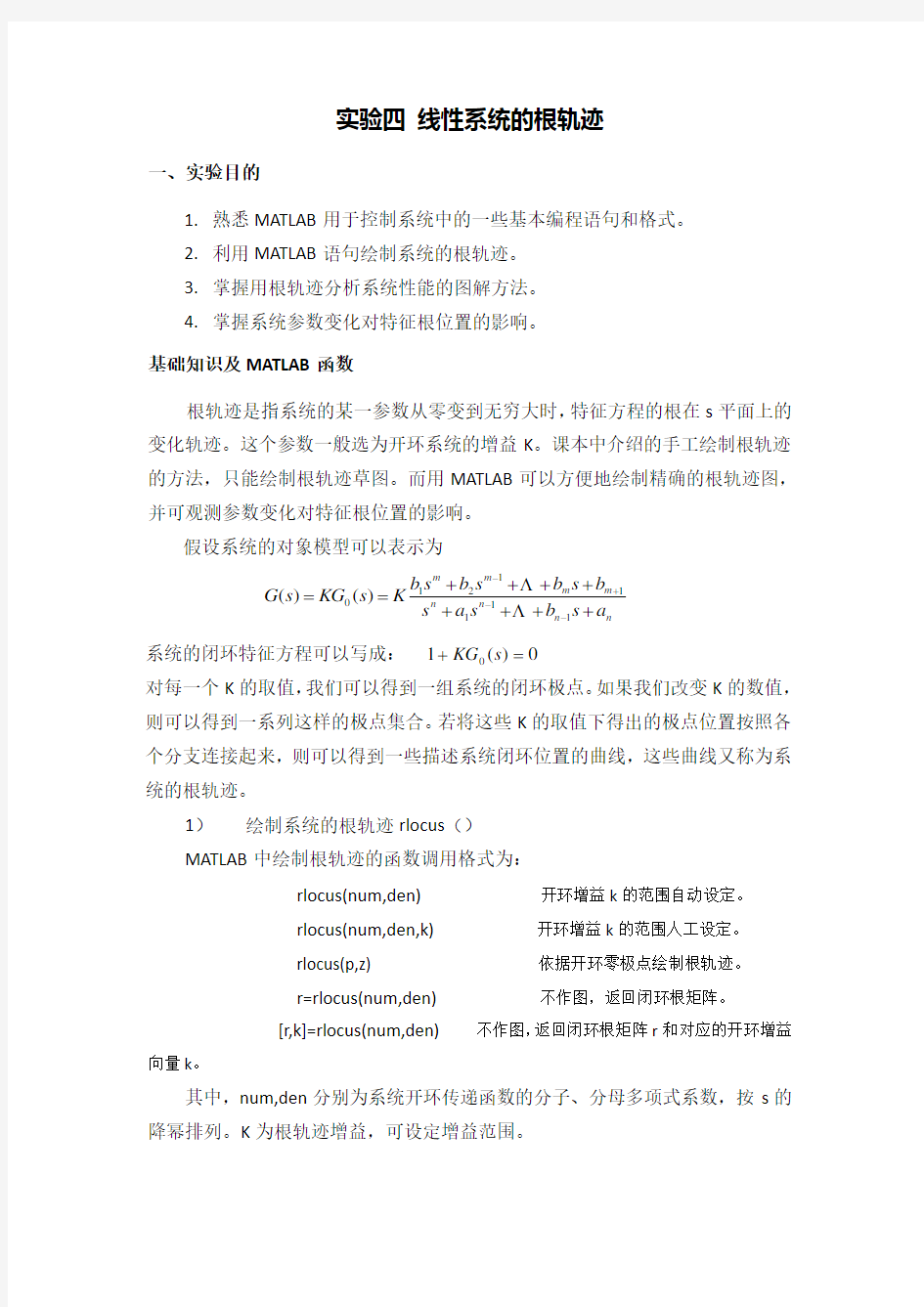
例3-1:已知系统的开环传递函数9
2
4)1()(23++++=*
s s s s K s G ,绘制系统的根轨迹的MATLAB 的调用语句如下: num=[1 1]; %定义分子多项式 den=[1 4 2 9]; %定义分母多项式 rlocus (num,den) %绘制系统的根轨迹 grid %画网格标度线 xlabel(‘Real Axis ’),ylabel(‘Imaginary Axis ’) %给坐标轴加上说明 title(‘Root Locus ’) %给图形加上标题名
则该系统的根轨迹如图3-1所示:
若上例要绘制K 在(1,10)的根轨迹图,则此时的MATLAB 的调用格式如下,对应的根轨迹如图3-2所示。
num=[1 1];
den=[1 4 2 9];
k=1::10;
rlocus (num,den,k)
2) 确定闭环根位置对应增益值K 的函数rlocfind ()
在MATLAB 中,提供了rlocfind 函数获取与特定的复根对应的增益K 的值。在求出的根轨迹图上,可确定选定点的增益值K 和闭环根r (向量)的值。该函数的调用格式为:[k,r]=rlocfind(num,den)
执行前,先执行绘制根轨迹命令rlocus (num,den ),作出根轨迹图。执行rlocfind 命令时,出现提示语句“Select a point in the graphics window ”,即要求在根轨迹图上选定闭环极点。将鼠标移至根轨迹图选定的位置,单击左键确定,根轨迹图上出现“+”标记,即得到该点的增益K 和闭环根r 的返回变量值。
图3-1 系统的完整根轨迹图形 图3-2 特定增益范围内的根轨迹图形
例3-2:系统的开环传递函数为25386
5)(232+++++=*
s s s s s K s G ,试求:(1)系统的根轨迹;(2)系统稳定的K 的范围;(3)K=1时闭环系统阶跃响应曲线。则此时的MATLAB 的调用格式为:
G=tf([1,5,6],[1,8,3,25]);
rlocus (G); %绘制系统的根轨迹
[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应
的极点r
G_c=feedback(G,1); %形成单位负反馈闭环系统
step(G_c) %绘制闭环系统的阶跃响应曲线
则系统的根轨迹图和闭环系统阶跃响应曲线如图3-2所示。
其中,调用rlocfind ()函数,求出系统与虚轴交点的K 值,可得与虚轴交点的K 值为,故系统稳定的K 的范围为),0264.0(∞∈K 。
二、实验内容
请绘制下面系统的根轨迹曲线
)
136)(22()(22++++=s s s s s K s G )
10)(10012)(1()12()(2+++++=s s s s s K s G )
11.0012.0)(10714.0()105.0()(2++++=s s s s s K s G 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。
(a )根轨迹图形 (b )K=1时的阶跃响应曲线
图3-2 系统的根轨迹和阶跃响应曲线
,程序代码
num=[0,0,0,0,0,1]; %定义分子多项式
den=[1,8,27,38,26,0]; %定义分母多项
rlocus(num,den); %绘制系统的根轨迹
grid %画网格标度线
[k,r]=rlocfind(num,den)
xlabel('Real Axis');ylabel('Imaginary Axis')
title('Root Locus');
1.2,截屏图
k =
r = + ; - ; + ; - ;
k =
r = + ; - ; + ; - ;
k =
r = + ; - ; ; + ; -
k =
r = + ;- ;;+ ;-
,分析可知k的范围是~~~
,程序代码
num=[0,0,0,1,12]; %定义分子多项式den=[1,23,121,1220,1000]; %定义分母多项rlocus(num,den); grid %绘制系统的根轨迹[k,r]=rlocfind(num,den)
xlabel('Real Axis');ylabel('Imaginary Axis');
title('Root Locus') ;
2.2,截屏图
k =
r = \ + \
k =
r = \ + \ - \
k =
r = \ + \ - \
k =
r = \ + \ - \
,分析可知:k的范围是~~~
,程序代码
num=[0,0,0,,1]; %定义分子多项式
den=[,,,1,0]; %定义分母多项
rlocus(num,den); grid %绘制系统的根轨迹[k,r]=rlocfind(num,den)
xlabel('Real Axis');ylabel('Imaginary Axis');
title('Root Locus') ;
3.2,截屏图
k =
r = \ + \ - \
k =
r = \ + \ - \
k =
r =+\ + -
k =
r = +\,分析可知:k的范围是,
三,实验体会与总结:
通过自动控制原理实验的学习与调试,使我学习和了解了许多知识。首先是对关自动控制原理相关的知识点有了更深刻的理解,原本课本上不是很懂得知识点许多都得到了相应的解答;其次是对这门课有了新的认识和理解,原本不知道学习这门课有什么作用,觉得无聊,不过现在才发现,学习、掌握好这门课不仅可以使我们队信号处理的过程与原理有了根本的理解和应用,而且可以方便的利用相关知识去理解和解答相关疑难问题;更重要的事学习和掌握了许多相关matlab软件的应用方法和知识,在学习技能和方法上使得自己有了更高的进步,掌握了又多一门的学习技能和方法,为以后学习和应用打下了相关的基础知识与根基,相信在以后的学习和生后中都将受益。
不过,我也从中认识到自己在相关知识领域的认识不足和缺陷,不过通过实验的过程都有所了解和体会,在以后的学习过程中就会多方面去注意,查漏补缺。
综合而言,这门课的实验课给了我一个愉快的,丰厚的过程。感谢这门课所带给我的巨大作用,同时感谢指导老师耐心细致的开导与指点,此致敬礼。
实验三 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、实验报告 1.根据内容要求,写出调试好的MATLAB 语言程序,及对应的结果。 2. 记录显示的根轨迹图形,根据实验结果分析根轨迹的绘制规则。 3. 根据实验结果分析闭环系统的性能,观察根轨迹上一些特殊点对应的K 值,确定闭环系统稳定的范围。 4.写出实验的心得与体会。 三、实验内容 请绘制下面系统的根轨迹曲线同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 一、 ) 136)(22()(2 2 ++++=s s s s s K s G 1、程序代码: G=tf([1],[1,8,27,38,26]); rlocus (G); [k,r]=rlocfind(G) G_c=feedback(G,1); step(G_c) 2、实验结果:
-8-6 -4 -2 24 6 8 Root Locus Real Axis I m a g i n a r y A x i s selected_point = -8.8815 + 9.4658i k = 1.8560e+04 r = -10.2089 + 8.3108i -10.2089 - 8.3108i 6.2089 + 8.2888i 6.2089 - 8.2888i Time (seconds) A m p l i t u d e selected_point = -9.5640 - 7.6273i k = 1.3262e+04 r = -9.5400 + 7.6518i -9.5400 - 7.6518i 5.5400 + 7.6258i 5.5400 - 7.6258i Time (seconds) A m p l i t u d e
实验三 根轨迹分析 一、实验目的: 1.熟悉零、极点对根轨迹的影响 2.组合典型环节按照题目完成相应曲线 二、实验内容 鱼鹰型倾斜旋翼飞机V-22既是一种普通飞机,又是一种直升机。当飞机起飞和着陆时,其发动机位置可以使V-22像直升机那样垂直起降,而在起飞后,它又可以将发动机旋转90度,切换到水平位置,像普通飞机一样飞行。在直升机模式下,飞机的高度控制系统如图所示。要求: (1) 概略绘出当控制器增益K1变化时的系统根轨迹图,确定使系统稳定的K1值范围; (2) 当取K1=280时,求系统对单位阶跃输入r(t)=l(t)的实际输出h(t),并确定系统的 超调量和调节时间(Δ=2%); (3) 当K1=280,r(t)=0时,求系统对单位阶跃扰动N (s )=1/s 的输出h n (t); (4) 若在R (s )和第一个比较点之间增加一个前置滤波器 G p (s)= 5 .05.15 .02 ++s s Matlab 指令如下 fenzi=[1 1.5 0.5]; fenmu=[1 0]; G1=tf(fenzi,fenmu) fenzi=[1]; fenmu=conv(conv([20 1],[10 1]),[0.5 1]); G2=tf(fenzi,fenmu) sys1=series(G1,G2) rlocus(sys1) sys2=feedback(280*sys1,1) step(sys2) sys3=feedback(G2,280*G1) step(sys3) G3=tf([0.5],[1 1.5 0.5]) sys4=series(G3,sys2) step(sys4)
线性系统理论Matlab实验报告 1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具 有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。 (1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控; 判断能控程序设计如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; Qc=ctrb(A,B) Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 Rc=rank(Qc) Rc =2 Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。 (2)求取状态反馈器中的K,设的期望特征根为-7,-9; 其设计程序如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; P=[-7 -9]; k=place(A,B,P) k = 1.0e+003 * -0.0200 9.0000 0.0072 -0.4500 程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。 2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
实验三 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、基础知识及MATLAB 函数 根轨迹是指系统的某一参数从零变到无穷大时,特征方程的根在s 平面上的变化轨迹。这个参数一般选为开环系统的增益K 。课本中介绍的手工绘制根轨迹的方法,只能绘制根轨迹草图。而用MATLAB 可以方便地绘制精确的根轨迹图,并可观测参数变化对特征根位置的影响。 假设系统的对象模型可以表示为 11210111()()m m m m n n n n b s b s b s b G s KG s K s a s b s a -+--++++==++++ 系统的闭环特征方程可以写成 01()0KG s += 对每一个K 的取值,我们可以得到一组系统的闭环极点。如果我们改变K 的数值,则可以得到一系列这样的极点集合。若将这些K 的取值下得出的极点位置按照各个分支连接起来,则可以得到一些描述系统闭环位置的曲线,这些曲线又称为系统的根轨迹。 绘制系统的根轨迹rlocus () MATLAB 中绘制根轨迹的函数调用格式为: rlocus(num,den) 开环增益k 的范围自动设定。 rlocus(num,den,k) 开环增益k 的范围人工设定。 rlocus(p,z) 依据开环零极点绘制根轨迹。 r=rlocus(num,den) 不作图,返回闭环根矩阵。 [r,k]=rlocus(num,den) 不作图,返回闭环根矩阵r 和对应的开环增益向量k 。 其中,num,den 分别为系统开环传递函数的分子、分母多项式系数,按s 的降幂排列。K 为根轨迹增益,可设定增益范围。 例3-1:已知系统的开环传递函数3 2(1)()429s G s K s s s *+=+++,绘制系统的根轨迹的matlab 的调用语句如下: num=[1 1]; %定义分子多项式 den=[1 4 2 9]; %定义分母多项式 rlocus (num,den) %绘制系统的根轨迹 grid %画网格标度线 xlabel(‘Real Axis ’); ylabel(‘Imaginary Axis ’); %给坐标轴加上说明 title(‘Root Locus ’) %给图形加上标题名 则该系统的根轨迹如图3-1(a )所示。 若上例要绘制K 在(1,10)的根轨迹图,则此时的matlab 的调用格式如下,对应的根轨迹如图3-1(b )所示。 num=[1 1]; den=[1 4 2 9];
. 课程名称:控制理论乙指导老师:成绩: 实验名称:控制系统的根轨迹分析实验类型:同组学生姓名: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握用计算机辅助分析法分析控制系统的根轨迹 2.熟练掌握Simulink仿真环境 二、实验内容和原理 1.实验内容 一开环系统传递函数为 k(s?2)?s)G(22(s?4s?3)绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2.实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k)从零变到无穷大时,死循环系统特征方程的根在s平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设等。pzmap,rlocus,rlocfind计也具有指导意义。在MATLAB中,绘制根轨迹有关的函数有:3.实验要求 (1)编制MATLAB程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。三、主要仪器设备 仿真环境simulink计算机一台以及matlab软件,四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure
实验四基于MATLAB的根轨迹绘制与性能分析 [实验目的] 1.掌握MATLAB下的根轨迹绘制方法; 2.学会利用根轨迹进行系统分析。 [实验指导] 1.根轨迹作图函数(命令):rlocus( ) 调用格式: ①rlocus(sys) 或rlocus(num,den) ②rlocus(sys,k) ①②画根轨迹图,①变化参量(一般是根轨迹增益)范围系统自动给出; ②变化参量(一般是根轨迹增益)范围在程序中给出; ③r=rlocus(sys) ④ [r,k]=rlocus(sys) ③④不画根轨迹图,③返回闭环根向量;④返回闭环根向量(r)和变化参量(k)。 2.根与根轨迹增益的求取 ⑴在根轨迹上点击,可得到该点的根值和对应的根轨迹增益值。 ⑵使用计算给定根的根轨迹增益的函数(命令):rlocfind( ) 调用格式: ①[k,poles]=rlocfind(sys) ②[k,poles]= rlocfind(sys,p) 使用方法:
①首先,当前根轨迹已绘出。运行该命令时,在根轨迹图中显示出十字光标,当用户选择其中一点时,其相应的增益由k 记录,与增益相关的所有极点记录poles 中;同时,在命令行窗口显示出来。 ②事先事先给出极点p ,运行该命令时,除了显示出该根对应的增益以外,还显示出该增益对应的其它根。 3.开环零点极点位置绘图函数(命令): pzmap( ) 调用格式: ① pzmap(sys) ② [p,z]=pzmap(sys) 函数功能: 给定系统数学模型,作出开环零点极点位置图。 ① 零点极点绘图命令。零点标记为“+”,极点标记为“o”。 ② 返回零点极点值,不作图。 4.根轨迹渐进线的绘制 当根轨迹渐进线与实轴的交点σa 已求出后,可得到方程11()n m a K s σ-=--, 这是根轨迹渐进线的轨迹方程。 将1()() n m a K G s s σ-= -作为一个开环传递函数,录入到MATLAB 中,再使用根 轨迹作图函数(命令)rlocus( ),生成的轨迹就是原根轨迹的渐进线。 5.举例 例1:开环传递函数1 ()(1)(2) K G s s s s =++绘制其闭环根轨迹。 程序: >> z=[];p=[0,-1,-2];k=1;sys=zpk(z,p,k);rlocus(sys) 运行结果:
基于MA TLAB 的根轨迹分析 一.实验目的: 1.学习利用MATLAB 的语言绘制控制系统根轨迹的方法。 2.学习利用根轨迹分析系统的稳定性及动态特性。 二.实验内容: 1.应用MATLAB 语句画出控制系统的根轨迹。 2.求出系统稳定时,增益k 的范围。 3.分析系统开环零点和极点对系统稳定性的影响。 三.实验步骤 1.给定某系统的开环传递函数G(s)H(s)=k/s(s*s+4s+16),用MATLAB 与语言绘出该系统的根轨迹。 程序如下: num=[1]; den=[1,4,16,0]; G=tf(num,den) G1=zpk(G) Z=tzero(G) P=pole(G) pzmap(num,den); title('pole-zero Map') rlocus(num,den) 根轨迹如图 -12-10-8-6-4 -2024-10-8 -6 -4 -2 024 6 8 10 Root Locus Real Axis I m a g i n a r y A x i s
结论:由上图可知增益k 的取值范围:0 实验二 线性系统的根轨迹分析 一、实验目的 1、掌握使用MATLAB 绘制控制系统根轨迹图的方法; 2、掌握根据根轨迹法对控制系统进行性能分析方法。 二、实验仪器设备 Pc 机一台,MATLAB 软件。 三、实验内容 1、已知一负反馈系统的开环传递函数为: ()()(0.11)(0.51) K G s H s s s s = ++求: (1)绘制根轨迹。 (2)选取根轨迹与徐州的交点,并确定系统稳定的根轨迹增益K 的范围。 (3)确定分离点的超调量p M 及开环增益K 。 (4)用时域响应曲线验证系统稳定的根轨迹增益K 的范围。 (5)分析根轨迹的一般规律。 2、已知系统的开环传递函数为: 22(431) ()(351) K s s G s s s s ++= ++ 求: (1)绘制系统的根轨迹。 (2)选择系统当阻尼比ξ=0.7时系统闭环极点的坐标值及增益K 值。 (3)分析系统性能。 四、实验结果 负反馈系统的开环传递函数为: ()()(0.11)(0.51)K G s H s s s s = ++ 1、根轨迹 2、理论计算: 根轨迹的基本性质和绘制规则如下: 规则一 系统根轨迹的各条分支是连续的,而且对称于实轴。 规则二 当K=0时,根轨迹的各条分支从开环极点出发;当K→∞,有m 条分支趋向于开环零点,另外有n-m 条分支趋向无穷远处。 可知,K=0时,3条根轨迹分别从开环极点(0, j0)、(-10,j0)和(-2,j0)出发,由于无开环零点,3条根轨迹趋向于无穷远处。 规则三 在s 平面实轴的线段上存在根轨迹的条件是,在这些线段右边的开环零点和开环极点的数目之和为奇数。 可知,根轨迹在实轴上存在的部分为[-∞,-10]和[-2,0]。 规则四 根轨迹中趋向于无穷远处的n-m 条分支的渐近线的相角为: (21)180a q n m φ+?=± - 0,1,2,,q n m =-- 可知,两条根轨迹无穷远时趋向的渐近线斜率相角为±60°。 规则五 伸向无穷远处的根轨迹的渐近线与实轴交于一点,交点的坐标为: 11 ( ,0)n m i j i j p z j n m ==--∑∑。 可知,渐近线与实轴交点为1020 ( ,0)(6,0)2 j j ---=- 第五课 线性系统的根轨迹法 教学目的: 1.熟练掌握使用MATLAB 绘制根轨迹图形的方法。 2.进一步加深对根轨迹图的了解。 3.掌握利用所绘制根轨迹图形分析系统性能的方法。 教学内容: 1.用实验的方法求解根轨迹。 在Matlab 控制系统工具箱中提供了rlocus()函数,来绘制根轨迹,rlocus()的调用格式为: r=rlocus(g,k); 式中的g 为线性系统的数学模型;k 为用户自己选择的增益向量;返回的变量r 为根轨迹上对应向量k 的各个增益点的闭环系统的根。 如果用户不给出k 向量,则该函数会自动选择增益向量,在这种情况下,该函数的调用格式为: [r,k]=rlocus(g); 式中向量k 为自动生成的增益向量,r 仍为对应各个k 值的闭环系统的特征根。 例1 系统1的开环传递函数为:) 15.0)(12.0()(++=s s s K s G K 要求:(1)绘制并记录根轨迹; (2)确定根轨迹的分离点与相应的根轨迹增益; (3)确定临界稳定时的根轨迹增益。 (1)参考程序: K=1; z=[]; p=[0,-5,-2]; [num,den]=zp2tf(z,p,K); rlocus(num,den) Matlab运行时出现的根轨迹图形窗口中,可以用鼠标单击所关心的根轨迹上的点,就出现有关这一点的信息,包括相应增益、极点位置、阻尼参数、超调量、自然频率。 例2系统开环传递函数)2()(2 n n s s K s G ?ωω+=中引入一个附加的极点s=-a ,即系统的 开环传递函数变为) )(2()(2 a s s s Ka s G n n ++=?ωω 给出5.0,/2==?ωs rad n ,a 分别为1,3,5时系统的根轨迹变化曲线。 参考程序: clear clc wn=2; xita=0.5; a=[1,3,5]; for i=1:length(a) G=tf(a(i)*wn^2,conv([1,2*xita*wn,0],[1,a(i)])); rlocus(G); axis([-8,5,-5,5]) hold on disp('press any key to continue.') pause%系统暂停,按任意键继续 end 线性系统的根轨迹 一、 实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、 实验容 1. 请绘制下面系统的根轨迹曲线。 ) 136)(22()(22++++=s s s s s K s G ) 10)(10012)(1()12()(2+++++=s s s s s K s G )11.0012.0)(10714.0()105.0()(2++++= s s s s K s G 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的围。 2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并 观察增加极、零点对系统的影响。 三、 实验结果及分析 1.(1) ) 136)(22()(22++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: num=[1]; den=[1 8 27 38 26 0]; rlocus(num,den) [r,k]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = 0.0021 + 0.9627i k = 28.7425 r = -2.8199 + 2.1667i -2.8199 - 2.1667i -2.3313 -0.0145 + 0.9873i 课程名称: 控制理论乙 指导老师: 成绩: 实验名称: 控制系统的根轨迹分析 实验类型: 同组学生姓名: 一、实验目的和要求(必填) 二、实验容和原理(必填) 三、主要仪器设备(必填) 四、操作法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1. 掌握用计算机辅助分析法分析控制系统的根轨迹 2. 熟练掌握Simulink 仿真环境 二、实验容和原理 1. 实验容 一开环系统传递函数为 22) 34()2()(+++=s s s k s G 绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2. 实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k )从零变到无穷大时,死循环系统特征程的根在s 平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设计也具有指导意义。在MATLAB 中,绘制根轨迹有关的函数有:rlocus ,rlocfind ,pzmap 等。 3. 实验要求 (1)编制MATLAB 程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink 仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。 三、主要仪器设备 计算机一台以及matlab 软件,simulink 仿真环境 四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure >> pzmap(G) 《自动控制原理》课程实验报告 实验名称系统根轨迹分析 专业班级 *********** ********* 学 号 姓名** 指导教师李离 学院名称电气信息学院 2012 年 12 月 15 日 一、实验目的 1、掌握利用MATLAB 精确绘制闭环系统根轨迹的方法; 2、了解系统参数或零极点位置变化对系统根轨迹的影响; 二、实验设备 1、硬件:个人计算机 2、软件:MATLAB 仿真软件(版本6.5或以上) 三、实验内容和步骤 1.根轨迹的绘制 利用Matlab 绘制跟轨迹的步骤如下: 1) 将系统特征方程改成为如下形式:1 + KG ( s ) = 1 + K ) () (s q s p =0, 其中,K 为我们所关心的参数。 2) 调用函数 r locus 生成根轨迹。 关于函数 rlocus 的说明见图 3.1。 不使用左边的选项也能画出根轨迹,使用左边的选项时,能 返回分别以矩阵和向量形式表征的特征根的值及与之对应的增益值。 图3.1 函数rlocus 的调用 例如,图 3.2 所示系统特征根的根轨迹及其绘制程序见图 3.3。 图3.2 闭环系统一 图3.3 闭环系统一的根轨迹及其绘制程序 图 3.4 函数 rlocfind 的使用方法 注意:在这里,构成系统 s ys 时,K 不包括在其中,且要使分子和分母中 s 最高次幂项的系数为1。 当系统开环传达函数为零、极点形式时,可调用函数 z pk 构成系统 s ys : sys = zpk([zero],[pole],1); 当系统开环传达函数无零点时,[zero]写成空集[]。 对于图 3.2 所示系统, G(s)H(s)= )2()1(++s s s K *11+s =) 3)(2() 1(+++s s s s K . 可如下式调用函数 z pk 构成系统 s ys : sys=zpk([-1],[0 -2 -3],1) 若想得到根轨迹上某个特征根及其对应的 K 的值,一种方法是在调用了函数 rlocus 并得到了根 轨迹后调用函数 rlocfind 。然后,将鼠标移至根轨迹图上会出现一个可移动的大十字。将该十字的 中心移至根轨迹上某点,再点击鼠标左键,就可在命令窗口看到该点对应的根值和 K 值了。另外一种 较为方便的做法是在调用了函数 rlocus 并得到了根轨迹后直接将鼠标移至根轨迹图中根轨迹上某 4.1某系统的结构如题4-1图所示,试求单位阶跃响应的调节时间t s ,若要求t s =0.1秒,系统的反馈系数应调整为多少? 解:(1)由系统结构图可知系统闭环传递函数为: 100 ()100()1001()()1001*G s s s G s H s s a a s Φ=== +++ 在单位阶跃函数作用下系统输出为: 12100 ()()()(100)100k k C s R s s s s a s s a =Φ= =+++ 为求系统单位阶跃响应,对C(s)进行拉斯反变换: 10 21001001001001 lim ()lim 1001001 lim (100)()lim 11 ()(100)1 ()(1) s s s a s a at k sC s s a a k s a C s s a C s as a s a c t e a →→→-→--=== +=+==- =- +=- 根据定义调节时间等于响应曲线进入5%误差带,并保持在此误差带内所需要的最短时间,且根据响应系统单位阶跃响应的函数表达式可以看出系统单位阶跃响应的稳态值为 1 a ,因此: 10010011()(1)0.950.051 ln 20 1001 =0.1ln 20=0.3s 10 s s at s at s s c t e a a e t a a t --= -=?=?== 因为题中,所以 (2)若要求t s =0.1秒,则有: 1 ln 20=0.1 100=0.3s t a a = ? 即:若要求调节时间缩小为0.1秒,则需将反馈环节的反馈系数调整为0.3。 4.2已知二阶系统的阶跃响应曲线如题4.2图所示,该系统为单位负反馈系统,试确定其开环传递函数。 解:根据系统阶跃响应曲线可以看出: 峰值时间=0.1s p t ,超调量 1.3-1 %= 100%30%1 σ?=; 根据课本中对典型二阶系统222 ()2n n n s s s ωζωωΦ=++暂态性能指标的推导计算可知: %p t e σ-= =结合本题已知阶跃响应曲线可知: 0.1(1)%30% (2) p t e σ-= === 由式(2)可知: 0.3ln 0.30.3832 cot =0.3832 =arccot 0.3832=69.0332=cos =0.3578 e ζ?ζ?ζ?-=?-=?= =即: 将ζ带入式(1)中可得: 0.1 p n t ω= = 回顾题意对于典型二阶系统其闭环传递函数为222 ()2n n n s s s ωζωωΦ=++,且系统为单位负反馈系统,所以系统开环传递函数和闭环传递函数之间满足如下关系: 2222 2 22 2 2211 ()()121211211131.8851 ===224.0753n n n n n n n n n G s s s s G s s G s s G G s s s s ωζωζωωωζωωωζωΦ==Φ==+++++++++,因为:所以:, 武汉工程大学自动控制原理实验报告 专业班级:指导老师: 姓名:学号: 实验名称:系统根轨迹分析 实验日期:2011-12-01 第三次试验 一、实验目的 1、掌握利用MATLAB精确绘制闭环系统根轨迹的方法; 2、了解系统参数或零极点位置变化对系统根轨迹的影响; 二、实验设备 1、硬件:个人计算机 2、软件:MATLAB仿真软件(版本6.5或以上) 实验内容 1.根轨迹的绘制 1) 将系统特征方程改成为如下形式:1 + KG ( s ) = 1 + K ) () (s q s p =0, 其中,K 为我们所关心的参数。 2) 调用函数 r locus 生成根轨迹。 关于函数 rlocus 的说明见图 3.1。 不使用左边的选项也能画出根轨迹,使用左边的选项时,能 返回分别以矩阵和向量形式表征的特征根的值及与之对应的增益值。 图3.1 函数rlocus 的调用 例如,图 3.2 所示系统特征根的根轨迹及其绘制程序见图 3.3。 图3.2 闭环系统一 图3.3 闭环系统一 的根轨迹及其绘制 程序 注意:在这里,构成系统s ys 时,K 不包括在其中,且要使分子和分母中s最高 次幂项的系数为1。 当系统开环传达函数为零、极点形式时,可调用函数 z pk 构成系统 s ys : sys = zpk([zero],[pole],1); 当系统开环传达函数无零点时,[zero]写成空集[]。 对于图 3.2 所示系统, G(s)H(s)= )2()1(++s s s K *11+s =) 3)(2() 1(+++s s s s K . 可如下式调用函数 z pk 构成系统 s ys : sys=zpk([-1],[0 -2 -3],1) 若想得到根轨迹上某个特征根及其对应的 K 的值,一种方法是在调用了函数 rlocus 并得到了根 轨迹后调用函数 r locfind 。然后,将鼠标移至根轨迹图上会出现一个可移动的大十字。将该十字的 中心移至根轨迹上某点,再点击鼠标左键,就可在命令窗口看到该点对应的根值和 K 值了。另外一种 较为方便的做法是在调用了函数 rlocus 并得到了根轨迹后直接将鼠标移至根轨迹图中根轨迹上某点 并点击鼠标左键,这时图上会出现一个关于该点的信息框,其中包括该系统在此点的特征根的值及其 对应的 K 值、超调量和阻尼比等值。图 3.4 给出了函数 r locfind 的用法。 2.实验内容 图3.5 闭环系统二 1) 对于图 3.5 所示系统,编写程序分别绘制当 (1) G(s)= )2(+s s K , (2) G(s)= ) 4)(1(++s s s K , 《自动控制理论》 实验报告 专业:电气工程及其自动化班号:1406111 学号:1140610319 姓名:赵元胜 电气工程及其自动化实验中心 二〇一六年十二月 实验六线性系统的根轨迹分析 一、实验目的 1、掌握使用MATLAB 绘制控制系统根轨迹图的方法; 2、掌握根据根轨迹法对控制系统进行性能分析方法; 二、实验设备 Pc 机一台,MA TLAB 软件。 三、实验举例 已知系统开环传递函数为 ) 2)(1()()(++=s s s K s H s G 求:绘制控制系统的根轨迹图,并分析根轨迹的一般规律。 解:1、绘制控制系统的根轨迹图 MATLAB 提供rlocus()函数来绘制系统的根轨迹图,其调用格式为 rlocus(num ,den)或[k ,p]=rlocusfind(num ,den) 在MATLAB 命令窗口>>提示符号下键入:(符号?表示回车) >>k=[1]? >>z=[]? >>p=[0 -1 -2]? >>[num,den]=zp2tf(z ,p ,k)? 零极点模型转化为多项式模型 >>rlocus(num ,den)? 绘制控制系统的根轨迹图 >>grid ? 绘制坐标 屏幕显示系统的根轨迹图形 2.分析根轨迹的一般规律 1)根轨迹3条,分别从起点(0,0)、(-1,0)和(-2,0)出发,随着k 值从0→∞变化,趋向无穷远处。 2)位于负实轴上的根轨迹(-∞,-2)和(-1,0)区段,其对应的阻尼ζ>1,超调量为0,系统处于过阻尼状态而且在远离虚轴的方向,增益k 增大,振荡频率ωn 随之提高,系统动态衰减速率相应增大。 3)在根轨迹分离点(-0.432,0)处,对应的阻尼ζ=1,超调量为0,开环增益K=0.385,系统处于临界阻尼状态。 4)根轨迹经过分离点后离开实轴,朝s 右半平面运动。当根轨迹在分离点与虚轴这个区间时,闭环极点由实数点变为共轭复数点,对应阻尼0<ζ<1,超调量越靠近虚轴越大,系统处于欠阻尼状态,其动态响应将出现衰减震荡,而越靠近实轴,增益K 越大,阻尼越小,振荡频率ωn 越高,振荡衰减越大。 自动控制原理课程实验报告 实验题目:线性系统的根轨迹分析 1.实验目的 1.根据对象的开环传函,做出根轨迹图。 2.掌握用根轨迹法分析系统的稳定性。 3.通过实际实验,来验证根轨迹方法。 2.实验设备 PC 机一台,TD-ACC+( 或TD-ACS)教学实验系统一套。3.1 实验原理及内容 1 .实验对象的结构框图:如图 2.1-1 所示。 2 .模拟电路构成:如图 2.1-2 所示 3 .绘制根轨迹 (1) 由开环传递函数分母多项式 S(S+1)(0.5S+1) 中最高阶次 n = 3 ,故根轨迹分支数为 3 。开环有 个极点: p1=0 ,p2=-1 ,p3=-2 (2) 实轴上的根轨迹: ① 起始于 0 、 - 1 、 - 2 ,其中 - 2 终止于无穷远处。 ②起始于 0 和 - 1 的两条根轨迹在实轴上相遇后分离,分离点为 显然 S2 不在根轨迹上,所以 S1 为系统的分离点,将 S1=- 0.422 代入特征方程 S(S+1)(0.5S+1)+K 中,得 K =0.193 (3) 根轨迹与虚轴的交点 将 S = j W 代入特征方程可得: 4 .根据根轨迹图分析系统的稳定性 根据图 2.1-3 所示根轨迹图,当开环增益 K 由零变化到无穷大时,可以获得系统的下 述性能: R = 500/K (1)当K=3 ;即R=166 KΩ时,闭环极点有一对在虚轴上的根,系统等幅振荡, 临界稳定。 (2)当K > 3 ;即R < 166 KΩ时,两条根轨迹进入S 右半平面,系统不稳定。 (3)当0 < K < 3 ;即R >166 KΩ时,两条根轨迹进入S 左半平面,系统稳定。 上述分析表明,根轨迹与系统性能之间有密切的联系。利用根轨迹不仅能够分析闭环系统的动态性能以及参数变化对系统动态性能的影响,而且还可以根据对系统暂态特性的要求确定可变参数和调整开环零、极点位臵以及改变它们的个数。这就是说,根轨迹法可用来解决线性系统的分析和综合问题。由于它是一种图解求根的方法,比较直观,避免了求解高阶系统特征根的麻烦,所以,根轨迹在工程实践中获得了广泛的应用。 3.2实验步骤1.绘制根轨迹图:实验前根据对象传函画出对象的根轨迹图,对其稳定性及暂态性能做出理论上的判断。并确定各种状态下系统开环增益K 的取值及相应的电阻值R。2.将信号源单元的“ ST”端插针与“ S”端插针用“短路块”短接。由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。将开关设在“方波”档,分别调节调幅和调频电位器,使得“ OUT”端输出的方波幅值为1V ,周期为10s 左右。注意:实验过程中,由于“ ST ”端和“ S ”端短接,运放具有锁零功能。而该对象的响应时间较长,看不全整个响应过程,此时只需在响应过程中将信号源中的“ST ” 端和“S ”端之间的短路块拔掉即可。 3.按模拟电路图2.1-2 接线,并且要求对系统每个环节进行整定,详见附录一;将2 中的方波信号加至输入端。 4.改变对象的开环增益,即改变电阻R 的值,用示波器的“ CH1”和“CH2”表笔分别 测量输入端和输出端,观察对象的时域响应曲线,应该和理论分析吻合。注意:此次实验中对象须严格整定,否则可能会导致和理论值相差较大。 2 线性系统的根轨迹研究 2.1 实验目的 (1) 考察闭环系统根轨迹的一般形成规律。 (2) 观察和理解引进零极点对闭环根轨迹的影响。 (3) 观察、理解根轨迹与系统时域响应之间的联系。 (4) 初步掌握利用产生根轨迹的基本指令和方法。 2.2 实验内容 根轨迹绘制的指令法、交互界面法;复平面极点分布和系统响应的关系。 已知单位负反馈系统的开环传递函数为2 )^54()2()(2+++=s s s K s G K(s+2)/(s^4+8s^3+26s^2+40s+25),实验要求: (1) 试用MATLAB 的rlocus 指令,绘制闭环系统根轨迹。(要求写出指令,并绘出图形。) G=tf (2) 利用MATLAB 的rlocfind 指令,确定根轨迹的分离点、根轨迹与虚轴的交点。(要求写出指令,并给出结果。) (3) 利用MATLAB 的rlocfind 指令,求出系统临界稳定增益,并用指令验证系统的稳定性。 (4) 利用SISOTOOL 交互界面,获取和记录根轨迹分离点、根轨迹与虚轴的交点处的关键参数,并与前面所得的结果进行校对验证。(要求写出记录值,并给出说明。) (5) 在SISOTOOL 界面上,打开闭环的阶跃响应界面,然后用鼠标使闭环极点(小红方块)从开环极点开始沿根轨迹不断移动,在观察三个闭环极点运动趋向的同时,注意观察系统阶跃响应的变化。根据观察,(A )写出响应中出现衰减振荡分量时的K 的取值范围,(B )写出该响应曲线呈现“欠阻尼”振荡型时的K 的取值范围。 (6) 添加零点或极点对系统性能的影响,以二阶系统为例开环传递函数 ) 6.0(1)(2s s s G += 添加零点,增加系统阻尼数,超调量减小,在sisotool 界面上做仿真,写出未添加零点时系统的超调量,峰值,调节时间,添加零点后系统的超调量,峰值,调节时间,并写出系统添加零点的数值,并进行理论分析。(选做) M A T L A B线性系统的根 轨迹实验 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN 实验报告 实验名称 线性系统的根轨迹 一、实验目的 1.熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2.利用MATLAB 语句绘制系统的根轨迹。 3.掌握用根轨迹分析系统性能的图解方法。 4.掌握系统参数变化对特征根位置的影响。 二、实验内容 1.请绘制下面系统的根轨迹曲线 ) 136)(22()(22++++=s s s s s K s G ) 10)(10012)(1()12()(2+++++=s s s s s K s G 2(0.051)()(0.07141)(0.0120.11) K s G s s s s s +=+++ 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并观察增加极、零点对系统的影响。 三、实验结果及分析 1.请绘制下面系统的根轨迹曲线 ) 136)(22()(22++++=s s s s s K s G ) 10)(10012)(1()12()(2+++++=s s s s s K s G 2(0.051)()(0.07141)(0.0120.11) K s G s s s s s +=+++ 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 (1)>> num=[0 0 1]; >> den=[conv([1,2,2],[1,6,13]),0]; >> rlocus (num,den) >> [k,r]=rlocfind(num,den) Select a point in the graphics window selected_point = + k = r = + - + - 使得闭环系统稳定K的范围为)4. K 31 ,0( 姓名: 学号: 得分: 实验四 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、基础知识及MATLAB 函数 根轨迹是指系统的某一参数从零变到无穷大时,特征方程的根在s 平面上的变化轨迹。这个参数一般选为开环系统的增益K 。课本中介绍的手工绘制根轨迹的方法,只能绘制根轨迹草图。而用MATLAB 可以方便地绘制精确的根轨迹图,并可观测参数变化对特征根位置的影响。 假设系统的对象模型可以表示为 1121 0111()()m m m m n n n n b s b s b s b G s KG s K s a s b s a -+--++++==++++ 系统的闭环特征方程可以写成 01()0KG s += 对每一个K 的取值,我们可以得到一组系统的闭环极点。如果我们改变K 的数值,则可以得到一系列这样的极点集合。若将这些K 的取值下得出的极点位置按照各个分支连接起来,则可以得到一些描述系统闭环位置的曲线,这些曲线又称为系统的根轨迹。 绘制系统的根轨迹rlocus () MATLAB 中绘制根轨迹的函数调用格式为: rlocus(num,den) 开环增益k 的范围自动设定。 rlocus(num,den,k) 开环增益k 的范围人工设定。 rlocus(p,z) 依据开环零极点绘制根轨迹。 r=rlocus(num,den) 不作图,返回闭环根矩阵。 [r,k]=rlocus(num,den) 不作图,返回闭环根矩阵r 和对应的开环增益向 量k 。 其中,num,den 分别为系统开环传递函数的分子、分母多项式系数,按s 的降幂排列。K 为根轨迹增益,可设定增益范围。 例3-1:已知系统的开环传递函数32(1) ()429 s G s K s s s * +=+++,绘制系统的根轨迹的matlab 的调用语句如下: num=[1 1]; %定义分子多项式 den=[1 4 2 9]; %定义分母多项式 rlocus (num;den) %绘制系统的根轨迹 grid %画网格标度线 xlabel(‘Real Axis ’),ylabel(‘Imaginary Axis ’) %给坐标轴加上说明 title(‘Root Locus ’) %给图形加上标题名 则该系统的根轨迹如图3-1(a )所示。 若上例要绘制K 在(1,10)的根轨迹图,则此时的matlab 的调用格式如下,对应的根轨迹如图3-1(b )所示。 实验六 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、基础知识及MATLAB 函数 根轨迹是指系统的某一参数从零变到无穷大时,特征方程的根在s 平面上的变化轨迹。这个参数一般选为开环系统的增益K 。课本中介绍的手工绘制根轨迹的方法,只能绘制根轨迹草图。而用MATLAB 可以方便地绘制精确的根轨迹图,并可观测参数变化对特征根位置的影响。 假设系统的对象模型可以表示为 n n n n m m m m a s b s a s b s b s b s b K s KG s G ++++++++==--+-11111210)()( 系统的闭环特征方程可以写成 0)(10=+s KG 对每一个K 的取值,我们可以得到一组系统的闭环极点。如果我们改变K 的数值,则可以得到一系列这样的极点集合。若将这些K 的取值下得出的极点位置按照各个分支连接起来,则可以得到一些描述系统闭环位置的曲线,这些曲线又称为系统的根轨迹。 1)绘制系统的根轨迹rlocus () MATLAB 中绘制根轨迹的函数调用格式为: rlocus(num,den) 开环增益k 的范围自动设定。 rlocus(num,den,k) 开环增益k 的范围人工设定。 rlocus(p,z) 依据开环零极点绘制根轨迹。 r=rlocus(num,den) 不作图,返回闭环根矩阵。 [r,k]=rlocus(num,den) 不作图,返回闭环根矩阵r 和对应的开环增 益向量k 。 其中,num,den 分别为系统开环传递函数的分子、分母多项式系数,按s 的