6-图像畸变校正
实验五 图像形状及颜色畸变的校正
一、 实验目的与要求
让学生了解数字图像的数学表达及相关概念,通过实验让学生加深对数学在相关学科的应用价值的认识,培养学生的实际操作能力,并引导他们建立基础学科在处理具体问题时方法上联系。
二、 问题描述
对于在颜色或形状上发生畸变的图像,通过数学的方法实现校正。
三、问题分析
先由教师讲授数字图像的基本概念(包括图像的数学化、采样、量化、灰度、各种数学图像的文件格式、表色系、颜色映像等),再通过具体的实例给学生示范对于在颜色或形状上发生畸变的图像如何通过数学的方法实现校正的过程。最后让学生动手完成对某些特殊畸变的图像的校正,写出数学原理和实验报告。
四、背景知识介绍
1. 数字图像的数值描述及分类
图像是对客观存在物体的一种相似性的生动模仿与描述,是物体的一种不完全的不精确的描述。数字图像是用一个数字阵列来表示的图像。数字阵列中的每个数字,表示数字图像的一个最小单位,称为像素。采样是将空域上或时域上连续的图像变换成离散采样点(像素)集合的一种操作。
对一幅图像采样后,若每行像素为M 个,每列像素为N 个,则图像大小为M ?N 个像素。例如,一幅640?480的图像,就表示这幅连续图像在长、宽方向上分别分成640个和480个像素。显然,想要得到更加清晰的图像质量,就要提高图像的采样像素点数,即使用更多的像素点来表示该图像。
客观世界是三维的,从客观场景中所拍摄到的图像是二维信息。因此,一幅图像可以定义为一个二维函数f(x,y),其中x,y 是空间坐标。对任何一对空间坐标(x,y)上的幅值f(x,y),成为表示图像在该点上的强度或灰度,或简称为像素值。因为矩阵是二维结构的数据,同时量化值取整数,因此,一幅数字图像可以用一个整数矩阵来表示。矩阵的元素位置(i,j),就对应于数字图像上的一个像素点的位置。矩阵元素的值f(i,j)就是对应像素点上的像素值。
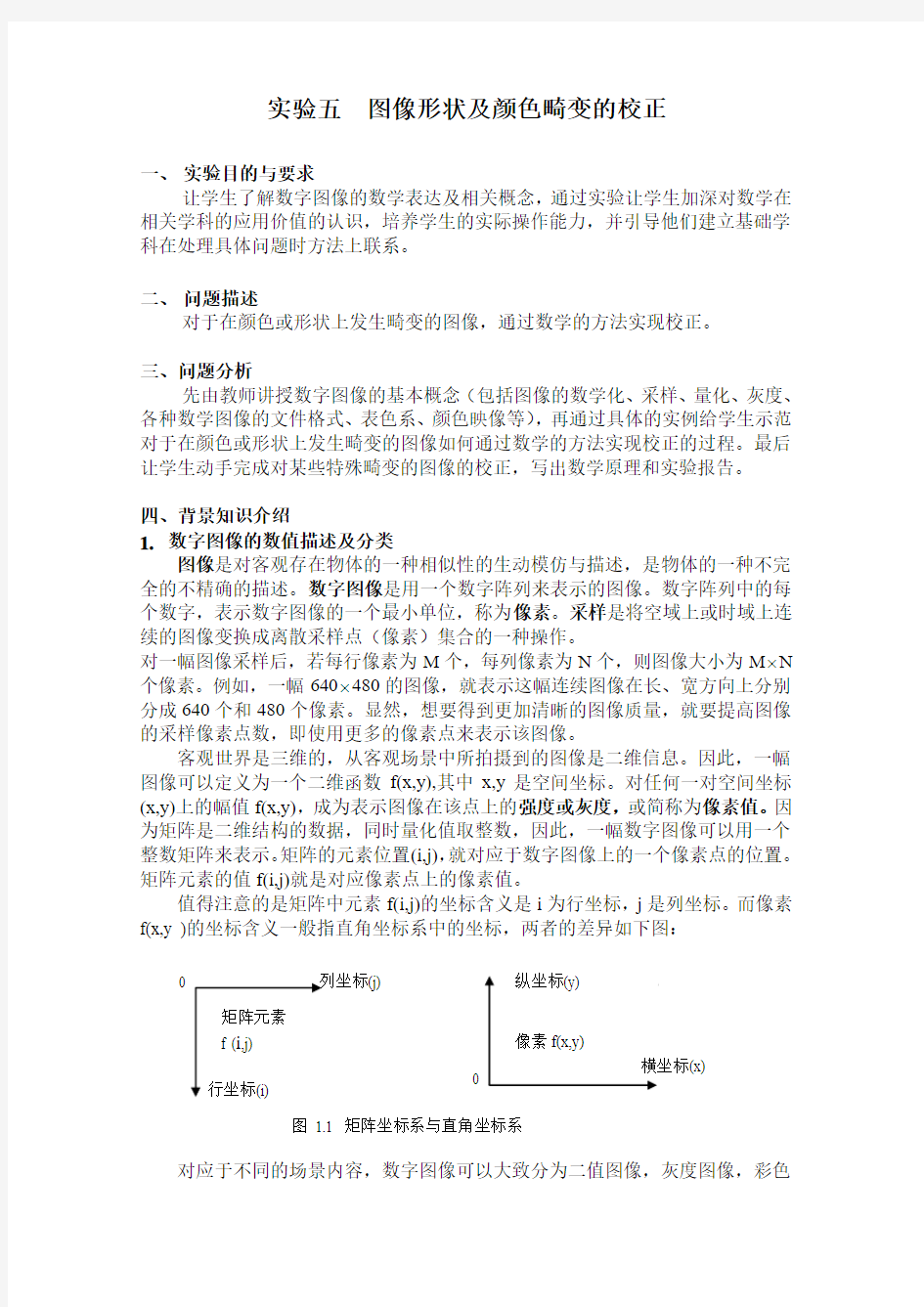
值得注意的是矩阵中元素f(i,j)的坐标含义是i 为行坐标,j 是列坐标。而像素f(x,y )的坐标含义一般指直角坐标系中的坐标,两者的差异如下图:
对应于不同的场景内容,数字图像可以大致分为二值图像,灰度图像,彩色0
列坐标(j) 行坐标(i) 矩阵元素
f (i ,j) 0
纵坐标(y) 横坐标(x) 像素f(x,y) 图 1.1 矩阵坐标系与直角坐标系
图像三类。
1)二值图像
它是指每个像素不是黑就是白,其灰度值没有中间过度的图像。二值图像对画面的细节信息比较粗略,适合于文字信息图像的描述。它的矩阵取值非常简单,即f(i,j)=0(黑),或f(i,j)=1(白),除此之外没有其他的取值。当然,0和1表示黑或白都只是人定义的,可以人为地反过来定义。这种图像具有数据量小的优点。
2)灰度图像
它是指每个像素的信息由一个量化后的灰度级来描述的数字图像,灰度图像中不包含彩色信息。标准灰度图像中每个像素的灰度有一个字节表示,灰度级数位256级,每个像素可以是0~255(从纯黑到纯白)之间的任何一个值。值越接近0就越黑,越接近255就越白。
3)彩色图像
常用的图像彩色模式有RGB模式、CMYK模式和HIS模式,一般情况下只使用RGB模式。它是根据三基色成像原理来实现对自然界中的色彩描述的。这一原理认为,自然界中的所有颜色都可以由红,绿,蓝(R,G,B)三基色组合而成。如果三种基色的灰度分别用一个字节(8bit)表示,则三基色之间不同的灰度组合可以形成不同的颜色。
2.数字图像质量决定因素
数字图像的效果与以下几个评价参数有关。
1)图像分辨率即采样所获得的图像总像素的多少。
2)采样密度即在图像上单位长度所包含的采样点数。采样密度的倒数是像素间距。
3)采样频率即一秒钟采样的次数。它反映了采样点之间的间隔大小,采样频率越高,丢失的信息越少,图像的质量越好。
4)扫描分辨率表示一台扫描仪输入图像的细微程度,指每英寸扫描所得的点,单位是DPI(DotPerInch)。数字越大,表示被扫描的图像转化为数字化图像越逼真,扫描仪质量也越好。
3.彩色空间
1)三基色原理
近代的三色学说研究认为,人眼的视网膜中存在着三种锥体细胞,它们包含不同的色素,对光的吸收和反射特性不同,对于不同的光就有不同的颜色感觉.研究发现,第一种锥体细胞专门感受红光,第二和第三种锥体细胞则分别感受绿光和蓝光.它们三者共同作用,使人们产生了不同的颜色感觉. 这三种色光以不同比例混合,几乎可以得到自然界中的一切色光,混合色域最大;而且这三种色光具有独立性,其中一种原色不能由另外的原色光混合而成,由此,称红,绿,蓝为色光三原色. 为了统一认识,1931年国际照明委员会(CIE)规定了三原色的波长nmR0.700=λ,nmG1.546=λ,nmB8.435=λ。
2)彩色的基本特征
色调(hue) 色调又称为色相,是当人眼看到一种或多种波长的光时所产生的彩色感觉,它反映颜色的种类,是决定颜色的基本特性.色调用红,橙,黄,绿,青,蓝,靛,紫等术语来刻画. 不透明物体的色调是指该物体在日光的照射下,所反射的各光谱成分作用于人眼的综合效果;透明物体的色调则是透过该物体的光谱综合作用的效果。
饱和度(saturation) 饱和度是指颜色的纯度,即色彩含有某种单色光的纯净程度,它可用来区别颜色的深浅程度.对于同一色调的彩色光,饱和度越深颜色越鲜明或说越纯,例如鲜红色饱和度高,而粉红色的饱和度低.完全饱和的颜色是指没有渗入白光所呈现的颜色,例如仅由单一波长组成的光谱色就是完全饱和的颜色。
亮度(brightness) 亮度是视觉系统对可见物体辐射或者发光多少的感知属性.亮度是光作用于人眼时所引起的明亮程度的感觉,它与被观察物体的发光强度有关.由于其强度的不同,看起来可能会亮一些或暗一些.对于同一物体,照射光越强,反射光也越强,感觉越亮;对于不同的物体在相同照射情况下,反射越强者看起来越亮。
通常把色调和饱和度通称为色度.亮度是用来表示某彩色光的明亮程度,而色度则表示颜色的类别与深浅程度。
五、实验过程
1.图像畸变介绍
从数字图像处理的观点来考察畸变校正, 实际上是一个图像恢复的过程, 是对一幅退化了的图像进行恢复。在图像处理中,图像质量的改善和校正技术,也就是图像复原,当初是在处理从人造卫星发送回来的劣质图像的过程中发展、完善的。目前,图像畸变校正的应用领域越来越广,几乎所有涉及应用扫描和成像的领域都需要畸变校正。图像在生成和传送的过程中,很可能会产生畸变,如:偏色、模糊、几何失真、几何倾斜等等。前几种失真主要是体现在显示器上,而后一种失真则多与图像集角度有关。不正确的显影,打印、扫描,抓拍受反射光线的影响等方式,都会使图像产生偏色现像。模糊、几何畸变主要是在仪器采集图片过程中产生,大多是因机器故障或操作不当影响导致,如在医学成像方面。而几何空间失真广泛存在于各种实际工程应用中,尤其是在遥感、遥测等领域。
2.图像畸变校正过程所用到的重要工具
灰度直方图是关于灰度级分布的函数,是对图象中灰度级分布的统计。灰度直方图是将数字图象中的所有像素,按照灰度值的大小,统计其所出现的频度。通常,灰度直方图的横坐标表示灰度值,纵坐标为想像素个数。直方图上的一个点的含义是,图像存在的等于某个灰度值的像素个数的多少。这样通过灰度直方图就可以对图像的某些整体效果进行描述。从数学上讲,图像的灰度直方图是图像各灰度值统计特征与图像灰度值出现的频率。从图形上来讲,它是一个一维曲线,表征了图像的最基本的统计特征。
作为表征图像特征的信息而在图像处理中起着重要的作用。由于直方图反映了图像的灰度分布状况,所以从对图像的观察与分析,到对图像处理结果的评价,灰度直方图都可以说是最简单、最有效的工具。
3.图像颜色畸变校正介绍
图像颜色畸变现象可以是由摄像器材导致,也可以是由于真实环境本身就偏色导致,还有的是由于图像放置过久氧化、老化导致。无论其产生的原因如何,其校正方法都是类似的。
图像颜色畸变校正在社会生活、工作中应用十分广泛。小到家庭生活图像处理,大到医学成像应用、罪犯识别和国防侦察,都离不开它。
由于灰度图比较简单,因此本文跳过灰度图,直接研究彩色图的颜色畸变校正,但无论是灰度图还是彩色图,其校正原理都是一样的,程序实现上只须对程
序进行小小的调整。
如果用Matlab显示颜色畸变的图像RGB基色直方图,发现相对正常图像,颜色畸变的图像的直方图的三种基色的直方图中至少有一个直方图的像素明显集中集中在一处,或则集中在0处或则集中在255处,而另一部分有空缺,或则集中在中间而两边空,因此通过调整该直方图的像素点的像素值在区间[0,255]上的分布来解决图像颜色畸变问题。如果直方图中像素集中在0一边则说明该基色偏暗,如果集中在255处则说明该基色偏亮。下图是一有颜色畸变的图像的基色B的直方图。
图1 基色B的直方图
很明显几乎所有像素点都集中在区间[a,b]上,这是偏暗的情况。那么要做的是把代表基色B的矩阵的数据拉伸,使得区间[a,b]扩大为区间[a,c]。只要做以下处理即可得到以上目的。对每一个x ,x在[a,b]上,x *(c-a)/(b-a),而所有的y,y在区间[b,c]上,y=c,c=255。其算法流程图为:
MATLAB中的算法实现如下:
function dealcolor(pic,k,d)
a=imread(pic); %提取指定图像到矩阵a
b=double(a); %将矩阵a的数据转化为double型[m,n]=size(b(:,:,k)); %取图像矩阵的行列数
fr=255/d; %设定拉伸系数
for i=1:m % 二重循环对矩阵内的每一个数据进行处理for j=1:n
bm=b(i,j,k)*fr; % 拉伸处理
if bm>255 %将所有值大于255的点都设为255
bm=255;
end
b(i,j,k)=bm;
end
end
c=uint8(b); %将矩阵b转化为8个字节的整型数据
image(c); %显示处理过的图像
注释:a ———要处理的图像矩阵,是一个三维矩阵
pic ———要处理的图像的路径
k ———要处理的第几个基色矩阵,1、2、3分别代表R、G、B
d ———向量,它的值是要拉伸的像素值中的最大值,0~255之间4.图像颜色畸变校正实例
对于已经发生颜色失真的图像(下图),通过数学变换进行校正。
图2 发生了颜色畸变的图像
可以看出,图像明显偏黄。下面研究它的RGB直方图,确定拉伸系数。
图 3 图2的RGB直方图
由于R、G的直方图则在0到255之间分布较为均匀,而在基色B的直方图中,像素值的分布明显是集中在140以下的部分,而基本没有多少点在140到255之间,这说明基色B偏暗。像素值在0~255之间分布偏向一边是导致这幅图像颜色畸变的原因,因此从基色B着手处理。
既然基色B直方图中像素分布不均匀,那么就应该把像素值在0到140之间的点的像素值拉伸以至它们均匀分布在0到255上。因此做以下的处理。将代表基色B的矩阵的每一个小于140的元素的值都乘以系数255/140 ,显然这样可以使区间[0,140] 拉伸为[0,255],以达到需要的效果。因此处理函数的输入参数为:
dealcolor(‘color.jpg’,3,140);
处理后得到的图片如下:
图4 校正后的图像
很明显图像整体色质得到了很好的改善。
在这里参数d 的值可以不断地变换,对比处理后的图像画质,选定一个最好的值作为参数d 的值来校正图像。经过测试,发现d 的值在区间[130,160]得到的校正图像基本没什么大的差别。
以上讨论的是单通道(单个基色直方图)向上调整(向255拉伸)的情况,而双通道、三通道需要调整的情况跟单通道的调整方法是一样的,我们只需要研究各个直方图,拿出需要的参数值,多次调用函数function dealcolor(pic,n,d) 即可。而对于需要向两边调整和向下调整(向0拉伸)的情况则只须先将需要拉伸的区间平移到0处,再进行向上调整。这些只需要对算法做一个小小的改动就可以实现。function dealcolor(pic,n,d)
% d是一个包含两个元素的向量, d(1)表示拉伸区间的下界d(2)表示拉伸区间的上界
a=imread(pic);
b=double(a);
[m,n]=size(b(:,:,n));
fr=255/(d(2)-d(1));
for i=1:m % 二重循环对矩阵内的每一个数据进行处理for j=1:n
bb= b(i,j,n)-d(1); %将每个元素值减去d(1)向0靠拢
if bb<0 %将所有处理前值小于d(1)的点的处理后的值设置为0
bb=0;
end
bm=bb*fr; % 拉伸处理
if bm>255 %将所有处理后值大于255的点都设为255 bm=255;
end
b(i,j,n)=bm;
end
end
c=uint8(b); %将矩阵b转化为8个字节的整型数据
image(c);
5.图像模糊校正算法介绍
图像模糊校正的应用与偏色校正的应用一样广泛而重要,在很多领域它们具有同样的重要地位:如医学成像、罪犯识别、国防侦察等等。虽然图像模糊校正最先是由处理间谍卫星图像而发展起来的,但是随着摄像设备特别是随着摄像监控技术在社会管理中的广泛应用,警察可以轻易从监控设备得到的犯罪罪犯图像资料。但由于技术上的缺陷,得到的图像资料通常都是模糊的,如果不进行相关的处理很难得到罪犯的特征,追缉工作难度也会增加。
图像的灰度变化情况可以表现为一曲线。当读入一个图像后,灰度变化就转变成了矩阵数据的变化。反映数据变化的数学手段可以采用微分算子。从数学的微分含义来看,“一阶微分”是描述“数据的变化率”,“二阶微分”是描述“数据变化率的变化率”。在感应灰度变化方面,二阶微分比一阶微分更具敏感性,尤其是对斜坡渐变的细节。因此采用二阶微分算子来处理。
最简单的各向同性微分算子是拉普拉斯微分算子。设原图为f(x,y),一个二维
的拉普拉斯微分算子定义为:22222
y f x f f ??+??=? 将它展开就得到 )1,()1,(),1(),1(),(42+---+---=?y x f y x f y x f y x f y x f f 。写成图像处理运
算模版的形式就是????
??????----=010141010L 。 算法的流程为:
设处理后的图像为g(x,y),则 ),(),(),(2y x f y x f y x g ?+=。用模板表示则是
????
??????----=010*******L ,模板中心点就是要处理的像素点。如果连对角线方向都考虑的话,模板的形式就表现为????
??????--------=1111911111L 。 由于模板是一个3阶矩阵,所以模板处理不了图像矩阵边缘的点。将这些处理不了的点像素值都设置为255。
在Matlab 中的算法实现为:
function pic_tem = pick_tem(b,x,y,j,tem_n) % b 是一个三维矩阵,j 是代表第几层矩阵
%tem_n 代表模板号0代表采用第一种模板,1代表采用第二种模板
if tem_n==0 %第一种模板
%返回二阶微分处理后的值
pic_tem=5*b(y,x,j)-(b(y,x-1,j)+b(y+1,x,j)+b(y-1,x,j)+b(y,x+1,j));
else %第二种模板
%返回二阶微分处理后的值
pic_tem=9*b(y,x,j)-(b(y-1,x-1,j)+b(y-1,x,j)+b(y-1,x+1,j)+b(y,x-1,j)+b(y+1,x+1,j)+b(y +1,x-1,j)+b(y+1,x,j)+b(y+1,x+1,j));
end
function faintness(pic,tem_n)
%pic 代表处理的图片的路径,tem_n 代表采用第几种模板
a=imread(pic); %导入图像,并把数据存放到三维矩阵a 中
b=double(a); %将数据转化为双精度
[h,w,k]=size(b); %取矩阵的维数
g=zeros(h,w,k)+255; %生成一个与原图像矩阵有相同维数的矩阵g
for y=2:h-1 %剔除图像矩阵最外一层的点,处理可以被模板包含的点 for x=2:w-1
for j=1:k
g(y,x,j)=pick_tem(b,x,y,j,tem_n); %采用二阶微分算子处理,返回处理点(x,y )后的像素值 end
end
end
image(uint8(g));%显示处理后的图像
6.图像模糊校正实例
下面的图像是一幅因调焦不准确而导致模糊了的图像。根据上述算法,用Matlab 对该图像进行校正。
图5 需要处理的照片
先采用模板
L处理上图,函数faintnesss输入参数如下:
faintness(’faintness.jpg’,0);
处理的结果为:
L处理后的图像
图6 用
L处理,函数faintnesss输入参数如下
再采用模板
1
faintness(’faintness.jpg’,1);
处理的结果为:
图7 用模板
L处理后的图像
1
图6和图7都比原图5要清晰得多,说明采用二阶微分算子来处理模糊是正确有效的。对比图6和图7,发现图7的线条轮廓比图6要清晰,但是相对图6,图7的噪音也加强了很多。这就是采用二阶微分处理模糊图像的一个弊端——加强噪音。
以上所研究的都是整幅图像模糊需要校正的情况,而局部模糊的图像校正跟全局模糊校正都是一样的基理。只须将需要校正的区域提取出来,把提取出来的图像区域作为一个图像整体看待,再用全局处理的方法来处理。那么可以根据这个原理把函数程序faintness一般化到局部可选情况。
function faintness(pic,tem_n,x1,y1,x2,y2) %(x1,y1)表示局部区域左上角点
%(x2,y2)表示局部区域右下角点
a=imread(pic);
b=double(a);
[h,w,k]=size(b);
g=b; % 替代g=zeros(h,w,k)+255;
for y=y1:y2
for x=x1:x2
for j=1:k
g(y,x,j)=pick_tem(b,j,tem_n);
end
end
end
image(uint8(g));
7.图像几何畸变校正算法介绍
几何畸变广泛存在于各种实际工程应用中,尤其是在遥感、遥测等领域。目前, 利用数字图像技术进行畸变校正主要应用于两个领域: 一是医用内窥镜图像
的校正, 目的是测量图像上病变区域的大小; 另一应用是机器视觉领域, 是为了提高它的视觉定位精度, 正确完成动作。几何畸变有桶形畸变、枕形畸变、几何倾斜等等。这里选择桶形畸变的校正作为研究的对象。
对于畸变的光学系统,畸变空间中的直线在像空间中一般不再是直线,而只有通过对称中心的直线是例外。因此在进行桶形畸变校正时须先找出对称中心,再进行通用的几何畸变校正过程。
桶形畸变校正一般步骤:
(1)找出畸变图对称中心,将畸变图代表的地址空间关系转换为以对称中心为原点的空间关系。
(2)空间变换:对输入图像(畸变图)上像素重新排列以恢复原空间关系。也就是利用地址映射关系为校正图空间上的每一个点找到它们在畸变图空间上的对应点。
(3)灰度插值:对空间变换后的像素赋予相应的灰度值以恢复原位置的灰度值。 几何畸变的校正要使用几何(坐标)变换,包括平行移动、旋转、扩大缩小等简单的变换。
在这里,先在直角坐标系下研究地址映射关系,在程序中则使用矩阵坐标系。设[f(x,y)]是原图,[f(u,v)]是发生畸变后的图像。
畸变校正的基本思想是,找出由(u,v) (x,y)的坐标变换αT (地址映射),然后令:)),((),(v u T f y x f α= α为参数向量。若畸变只是简单的纵横比的改变和倾斜,那么仿射变换可以校正这种畸变。取:{}F E D C B A T ,,,,,:=αα
[]C Bx Au x ++= ][F Ev Du y ++= []x 表示去最接近x 的整数
若能得到参数α的估计,问题就可以解决了。 但一般的畸变都不只是简单的纵横比的改变和倾斜,通常遇到的都是空间扭曲型几何畸变,俗语讲就是橡胶层面拉伸。它是曲线畸变,这里采用二次多项式来模拟它,可表示为:
25423210y a xy a x a y a x a a u +++++=(1) 25423210y b xy b x b y b x b b v +++++=(2) 同样,只要可以取得参数),(i i b a 的估计,畸变函数便可知,那么原则上,可以通过上式多项式变换来获得修正的空间扭曲映射。
(1)和(2)都是一个有6个参数的二元二次方程,那么只要在畸变图和校正图上各取六对对应点(其中从校正图上的点是估计值)就可以通过解方程组得到参数),(i i b a 的估计,理论上,取的对应点对数越多得到的参数),(i i b a 估计就越精确。设取m 对对应点,用向量来表示为
],...,,[21m t u u u U = ],...,,[21m t v v v V =
???????
?????????=2222222222
211121111.....
.......11m m m m m m y y x x y x y y x x y x y y x x y x A 其系数 ],...,,[10m t a a a a = ],...,,[10m t b b b b = 假设所取的m 对对应点组成的矩阵A 可逆,也就是说m 对对应点线性不相关,则容易计算得到系数),(i i b a :U A a -= V A b -=
由于采用灰度插值,所以在校正的处理过程是对校正图上每一点映射到畸变图,然后通过灰度插值来得到这一点的灰度值。因此校正所采用的是地址逆映射: []a y xy x y x u *,,,,,122= []
b y xy x y x v *,,,,,122= (?)
由地址映射(?)计算得到的(u,v )可能是非整数,而畸变图[f(u,v)]是数字图像,其像素值仅在坐标为整数处有定义,所以在非整数处的像素值要用其周围一些整数处的像素值来计算,这叫灰度插值。灰度插值有邻近插值法、双线性插值法等等。邻近插值法得到的图像通常都会出现锯齿现象,而双线性插值法得到的图像比邻近插值法得到的图像精确得多。通常情况下,双线性插值的精确度已经可以满足一般图像处理的要求,并不需要更高精确度的灰度插值。因此在这里将采用双线性插值法。
双线性插值利用(u,v)周围的四个最邻近像素的灰度值,根据下面方法来计算(u,v)处的灰度值。设(u,v)四个邻近像素点为ABCD 坐标分别为(i,j), (i+1,j), (i,j+1),(i+1,j+1)
设 i u -=α j v -=β
首先先计算出E,F 两处的灰度值,f(E)和f(F)
f(E)=β[f(C)-f(A)]+f(A) f(F)=β
[f(D)-f(B)]+f(B)
B C
D E F (i,j) (i,j+1) (i+1,j)
再计算(u,v):f(u,v)= [f(F)-f(E)]+f(E)
此f(u,v)值代表的就是校正后图像中(x,y)处的灰度值。
算法的流程为:
在Matlab中的算法实现为:
function gmodify(pic,uv,gm,og) %pic表示要处理的图像的路径文件名
%uv是一个二维矩阵,uv(:,1)代表上面提到的t U,uv(:,2)表示t V
%gm是一个二维矩阵,gm(j,:)代表在校正图空间上与uv(j,:)一一应的点
%og 代表对称中心,它是一个二维向量
a=imread(pic);
b=double(a);
n=size(gm(:,1));
for k=1:n%转换到以对称点为原点的空间关系并构造矩阵A
A(k,:)=[1,gm(k,1)-og(1),gm(k,2)-og(2),gm(k,1)-og(1)^2, (gm(k,1)-og(1))*(gm(k,2)-og(2)),(gm(k,2)-og(2))^2];
end
[h,w]=size(b(:,:,1));
sp=zeros(h,w,3)+255;
a0=pinv(A)* uv(:,2); %计算上面提到的地址映射的系数估计a
b0=pinv(A)* uv(:,1); %计算上面中提到的地址映射的系数估计b
for i=1:h %从理想图像矩阵出发处理
for j=1:w
x=[1,j-og(1),i-og(2),(j-og(1))^2,(i-og(2))*(j-og(1)),(i-og(2))^2];
u=x*a0+og(2); % 逆向映射(j,i)到畸变图像矩阵(v,u)
v=x*b0+og(1);
if (u>1)&&(u uu=floor(u); %对u取整 vv=floor(v); %对v取整 arf=u-uu; %计算上面提到的α bta=v-vv; %计算上面提到的β for k=1:3 %进行灰度双线性插值 ft1=(1-bta)*b(vv,uu,k)+bta*b(vv+1,uu,k); ft2=(1-bta)*b(vv,uu+1,k)+bta*b(vv+1,uu+1,k); sp(i,j,k)=(1-arf)*ft1+arf*ft2; end end end end image(uint8(sp)); %显示校正图像 8.图像几何畸变校正实例 下面是一幅已经发生严重几何变形的图片,根据上面描述的算法,对该图片进行几何畸变校正。 图8 畸变图 这里选择网状图是因为网状图更容易分析,校正效果也更容易观察。 观察畸变图,发现从上数下第五条横线和从左数起第六条竖线都是直线,因此选用这两条直线的交叉点作为对称中心进行畸变校正。然后,从畸变图中选出4个线性不相关的点,并估计它们在校正图上的对应点。因此得到的三个输入参数的值分别如下: pic=’tt.jpg’; uv=[144,26;26,198;144,416;308,241;19,29;303,30;307,325]; gm=[144,29;29,198;144,412;304,241;15,26;306,26;307,327]; og=[145,241]; gmodify(pic,uv,gm,og); 得到的校正图如下: 图 9 校正后的图片 虽然经过校正得到的图像仍有一定程度的畸变,但是畸变程度小多了。 对几何畸变图像的校正计算, 不可能完全准确的恢复原来的图像。这是因为影响畸变校正精度的因素是多方面的。其中对校正算法精度影响较大的几种误差有: 对称中心估算误差、系数估计误差、插值误差和灰度校正误差等。 该校正方法关键在于对称中心的估计和地址映射的系数估计,而系数估计的关键是在于所取对应点对的精确程度。显然,校正后的图像仍有一定程度的畸变是由于对应点对不够精确。校正图上的对应点的估计是很困难的,通常都需要对程序运行的结果图进行分析,然后不断进行调整。 六、结论及应用 通过实验我们可以了解到,我们学习了数字图像的基本概念,包括图像的数学化、采样、量化、灰度、各种数学图像的文件格式、表色系、颜色映像等。再通过具体的实例给学生示范了对于在颜色或形状上发生畸变的图像如何通过数学的方法实现校正的过程。 七、练习 寻找一份自己以前的已经发生颜色或形状畸变的照片,按照上面实验的原理,做出有效的校正,要求写出实验报告。 几何校正 1.遥感图像产生几何畸变的原因 地物目标发出的电磁波被卫星上所载传感器接收,这些电磁波上记录和传达了地物目标的信息,这是遥感图像成像的过程也是它的内在规律。在这个过程中图像的几何畸变也随即产生了,其中原因很多,主要表现在以下几个方面: 1. 1卫星位置和运动状态变化的影响 卫星围绕地球按椭圆轨道运动,引起卫星航高和飞行速度的变化,导致图像对应产生偏离与在卫星前进方向上的位置错动。另外,运动过程中卫星的偏航、翻滚和俯仰变化也能引起图像的畸变。 以上误差总的来说,都是因为传感器相对于地物的位置、姿态和运动速度变化产生的,属于外部误差。此外,由于传感器本身原因产生的误差,即内部误差,这类误差一般很小,通常人们不作考虑。 1. 2地球自转的影响 大多数卫星都是在轨道运行的降段接收图像,即当地球自西向东自转时,卫星自北向南运动。这种相对运动的结果会使卫星的星下位置产生偏离,从而使所成图像产生畸变。 1. 3地球表面曲率的影响 地球表面是不规则的曲面,这使卫星影像成像时像点发生移动,像元对应于地面的宽度不等。特别是当传感器扫描角度较大时,影响更加突出。 1. 4地形起伏的影响 当地形存在起伏时,使原来要反映的理想的地面点被垂直在其上的实际某高点所代替,引起图像上像点也产生相应的偏离。 1. 5大气折射的影响 由于大气圈的密度是不均匀分布的,从下向上越来越小,使得整个大气圈的折射率不断变化,当地物发出的电磁波穿越大气圈时,经折射后的传播路径不再是直线而是一条曲线,从而导致传感器接收的像点发生位移。 2.进行几何校正并保证精度的必要性 遥感图像几何校正的精确与否直接关系到应用遥感信息反应地表地物的地理位置和面积的精确度,关系到从图像上获取的信息准确与否,因此在选择控制点上要十分小心,尽可能提高其精度,并且要对校正结果进行反复的分析比较,必要时还要进行多次校正。几何校正让图像上地物对应的像元出现在它应该在的地方,再通过辐射校正、影像增强等遥感图像处理技术,还图像以“本来面目”。然后通过对图像的识别、分类、解译处理实现地面空间上各类资源信息的空间分析研究,使遥感技术投入到实际生产应用中。 3.几何精校正 遥感影像图的几何校正目前有3种方案,即系统校正、利用控制点校正以及混合校正。遥感数据接收后,首先由接收部门进行校正,这种校正叫系统校正(又叫几何粗校正) ,即把遥感传感器的校准数据、传感器的位置、卫星姿态等测量值代入理论校正公式进行几何畸变校正;而用户拿到这种产品后,由于使用目的不同或投影及比例尺不同,仍旧需要做进一步的几何校正,这就需要对其进行几何精校正即利用地面控制点GCP ( GroundContr ol2Point,遥感图像上易于识别,并可精确定位的点)对因其他因素引起的遥感图像几何畸变进行纠正。混合校正则是由一般地面站提供的遥感CCT已经完成了第一阶段的几何粗校正,用户所要完成的仅仅是对图像做进一步的几何精校正。 几何精校正就是利用地面控制点GCP对各种因素引起的遥感图像几何畸变进行校正。从数学上说,其原理是通过一组GCP建立原始的畸变图像空间与校正空间的坐标变换关系, 鱼眼图像畸变校正算法 司 磊 朱学玲 (安徽新华学院 信息工程学院 安徽 合肥 230088) 摘 要: 根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词: 鱼眼图像;畸变矫正;图像预处理;图像增强 中图分类号:TP391 文献标识码:A 文章编号:1671-7597(2012)1110166-02 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼 2 有关鱼眼图片的粗略校正 图像转换为理想图像的操作,这种操作在全方位视觉导航中具1)求取鱼眼图像行和列的比值 有重要的作用,是系统自动识别、跟踪和定位目标所必须的基将投射生成标准圆变换为鱼眼图片并求取图片中心点的方础操作。 法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮1 畸变图像的校正原理 廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点根据畸变图像特点标定坐标图,求取标定点像素的理想值坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的校正程序后,即可得到无畸变图像,具体处理过程如下: 像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概1)标定坐标 轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相标的标定,按正方形均匀排列圆点,如图1所示。 乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 图1 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的2)鱼眼图片的粗略扭曲校正 替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像像上与之对应的点,并找出该点处于二维平面坐标之中与之距离通过投射降低图像的扭曲程度变为正常的四方形的图像。 之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大在图2中,假设在没有扭曲的背景图像中,存在两个具有的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。相同x坐标的点,即k点和h点,并且在背景图像中随着圆上曲线再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位的经纬度的变大,扭曲程度也就越大,但是三维球面的整体从置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各左到右的各个面的角度的差值全部都是相等的,而且在x轴方向点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点上与二维畸变校正图像相对应的线段dx的均匀分割经度或是纬之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的度也是相等的。因此在二维图像的X轴方向上任意点坐标经度或 确定,可计算出其它圆点中心的坐标位置。 图2 —191— 数码相机设计中图像几何畸变校正的实现 万 峰,杜明辉 (华南理工大学电信学院,广州 510641) 摘 要:由于光学镜头的生产工艺等原因,数码相机拍摄图像常常会出现非线性的几何畸变。针对这一常见问题,采用基于MSE 拟合、双线性插值的方法对拍摄图像进行校正。实验结果表明,该方法能够在保证无颜色失真的条件下获得较为理想的校正结果。 关键词:几何畸变;MSE ;双线性插值 Correction of Lens Distortion in Digital Camera Design WAN Feng, DU Minghui (Department of Communication and Electronic Engineering, South China University of Technology, Guangzhou 510641) 【Abstract 】 Nonlinear geometry distortion is an general problem in digital camera design because of arts and crafts of optical lens. This paper gives a solution which is based on MSE and bilinear interpolation. Experiments show that this method is efficient and accurate. 【Key words 】Geometry distortion; MSE; Bilinear interpolation 计 算 机 工 程Computer Engineering 第31卷 第17期 Vol.31 № 17 2005年9月 September 2005 ·工程应用技术与实现·文章编号:1000—3428(2005)17—0191—02 文献标识码:A 中图分类号:TP391.4 为了真实再现拍摄者观察到的景像,图像几何畸变的校正一直以来都是数码相机开发中重要的研究题目。 导致拍摄图像出现几何畸变最常见的原因是光学镜头的变形。要进行校正首先应给出描述畸变的数学模型。可以从光学成像原理及镜头物理特性的角度给出这一模型[4],也可以从拍摄图像本身对畸变进行描述。对后者而言,通常通过在空域里寻找畸变前后像素的空间映射关系进行校正。近期则出现了在频域中进行几何校正的研究。 本文采用在空域里确定畸变前后像素空间映射关系的方法进行几何校正。它包括两个独立的算法:空间变换和灰度级插值。空间变换描述输入输出图像中对应像素的映射关系,灰度级插值则确定输出像素的灰度值。通过检测控制点坐标进行MSE 拟合的方法实现空间变换,灰度级插值则采用双线性插值的方法,整个过程采用向后映射法完成。为了使这一方法能够满足实际需要,要进一步考察了算法的运行时间。 1 图像几何校正的算法 假设未畸变图像的像素位置坐标为),(y x ,畸变图像中对应像素位置坐标为),(y x ′′。则其空间映射关系可以采用下面的多项式来近似: ∑∑∑∑=?==?==′=′N i i N j j i ij N i i N j j i ij y x b y y x a x 00 00 (1) 其中N 为多项式的阶数,ij a 和ij b 分别是多项式的系数。 N i ,,2,1,0L =;i N j ?=,,2,1,0L ;N j i ≤+。 在一定程度上,多项式的阶数越高,校正效果就越好,但相应的运算量也会显著增加。另一方面,图像畸变得越严重,校正所需要的多项式阶数也会越高。 1.1 MSE 拟合 式(1)中的多项式系数可以通过MSE 拟合的方法得到。 MSE 拟合的基本思想是,对于一个集合),(i i y x ,寻找函数f (x ) 使拟合的均方误差ε达到最小。对于式(1)中的x 坐标,则 ∑∑∑∑∑∑==?===?=?′= ?′=L l N i N j j l i l ij l y L l N i N j j l i l ij l x y x b y L y x a x L 12010 1201 0)(1)(1εε (2) 应达到最小。其中L 为控制点个数。式(2)的上式两边对ij a 求导并置等式值为零,下式两边对ij b 求导并置等式值为0,可得方程 ∑∑∑∑∑∑∑∑===?====?=′=??? ?? ???′=??? ?????L l t l s l l t l s l L l N i i N j j l i l ij L l t l s l l t l s l L l N i i N j j l i l ij y x y y x y x b y x x y x y x a 11001100 (3) N s ,,2,1,0L =;s N t ?=,,2,1,0L ;N t s ≤+。对于N 阶多项式,其系数个数为)2)(1(++=N N M 。即式(3)应 有M 个,从而可以组成两个线性方程组。将这两个方程组写成矩阵形式为 a b K X K Y == (4) 其中a 、b 、X 和Y 为M 维向量。K 为M 阶方阵,其行标由 s 和t 的排列组成,记为u ;列标由i 和j 的排列组成,记为v 。则 ∑=++=L l t j l s i l uv y x k 1 (5) 在图像中选择合适的控制点,将控制点的位置坐标代入上面的矩阵,可求解出所有的系数,从而得到空间映射的函 作者简介:万 峰(1976—),男,博士生,主研方向为数字图像与图像处理;杜明辉,教授、博导 收稿日期:2004-06-04 E-mail :f.wan@https://www.360docs.net/doc/5411609136.html, 数字图像处理 图像畸变及校正 1 图像畸变介绍 从数字图像处理的观点来考察畸变校正, 实际上是一个图像恢复的过程, 是对一幅退化了的图像进行恢复。在图像处理中,图像质量的改善和校正技术,也就是图像复原,当初是在处理从人造卫星发送回来的劣质图像的过程中发展、完善的。目前,图像畸变校正的应用领域越来越广,几乎所有涉及应用扫描和成像的领域都需要畸变校正。图像在生成和传送的过程中,很可能会产生畸变,如:偏色、模糊、几何失真、几何倾斜等等。前几种失真主要是体现在显示器上,而后一种失真则多与图像集角度有关。不正确的显影,打印、扫描,抓拍受反射光线的影响等方式,都会使图像产生偏色现像。模糊、几何畸变主要是在仪器采集图片过程中产生,大多是因机器故障或操作不当影响导致,如在医学成像方面。而几何空间失真广泛存在于各种实际工程应用中,尤其是在遥感、遥测等领域。 2 畸变产生的原因 在图像的获取或显示过程中往往会产生各种失真(畸变):几何形状失真、灰度失真、颜色失真。引起图像失真的原因有:成像系统的象差、畸变、带宽有限、拍摄姿态、扫描非线性、相对运动等;传感器件自身非均匀性导致响应不一致、传感器件工作状态、非均匀光照条件或点光源照明等;显示器件光电特性不一致;图像畸变的存在影响视觉效果,也是影响图像检测系统的形状检测和几何尺寸测量精度的重要因素之一。 3 图像畸变校正过程所用到的重要工具 灰度直方图是关于灰度级分布的函数,是对图象中灰度级分布的统计。灰度直方图是将数字图象中的所有像素,按照灰度值的大小,统计其所出现的频度。通常,灰度直方图的横坐标表示灰度值,纵坐标为想像素个数。直方图上的一个点的含义是,图像存在的等于某个灰度值的像素个数的多少。这样通过灰度直方图就可以对图像的某些整体效果进行描述。从数学上讲,图像的灰度直方图是图像各灰度值统计特征与图像灰度值出现的频率。从图形上来讲,它是一个一维曲线,表征了图像的最基本的统计特征。 作为表征图像特征的信息而在图像处理中起着重要的作用。由于直方图反映了图像的灰度分布状况,所以从对图像的观察与分析,到对图像处理结果的评价,灰度直方图都可以说是最简单、最有效的工具。 数字音视频处理大作业(一) 题目:图像畸变校正 班级:021212 学号:02121128 姓名:文威威 目录 第一章图像畸变概述.................................. - 1 - 第一节图像畸变的概念........................... - 1 - 第二节图像畸变形成原因......................... - 1 - 第二章通过算法去除图像畸变.......................... - 2 - 第一节引言..................................... - 2 - 第二节基于网格图像的图像畸变修正............... - 2 - 第三节基于现场定标的图像畸变校正............... - 3 - 第四节基于畸变等效曲面的图像畸变校正 ........... - 3 - 第一章图像畸变概述 第一节图像畸变的概念 图像畸变是指成像过程中所产生的图像像元的几何位置相对于参照系统(地面实际位置或地形图)发生的挤压、伸展、偏移和扭曲等变形,使图像的几何位置、尺寸、形状、方位等发生改变。 第二节图像畸变形成原因 造成图像畸变的原因包括:传感器性能误差,如摄像机的焦距变动、像主点偏移、镜头光学畸变、多光谱扫描仪扫描速度的非线性、扫描线首尾点成像的时间差引起的扫描线偏斜、采样和记录速度不均匀等;成像时的透视误差,如遥感成像系统投影方式主要有中心投影(摄像机)、斜距投影(侧视雷达)、全景投影(多光谱扫描)和多中心投影(胶带摄影机)等。除框幅式中心投影外,其它的投影方式都产生不同类型的畸变;飞行器姿态变化引起图像平移、旋转、扭曲和缩放;地球自转对扫描图像的影响;地形和地物高度变化,引起像点位移和比例尺改变;地球曲率的影响;大气折射,改变了光的传播方向、路径和雷达波的传播时间。 实验五 图像形状及颜色畸变的校正 一、 实验目的与要求 让学生了解数字图像的数学表达及相关概念,通过实验让学生加深对数学在相关学科的应用价值的认识,培养学生的实际操作能力,并引导他们建立基础学科在处理具体问题时方法上联系。 二、 问题描述 对于在颜色或形状上发生畸变的图像,通过数学的方法实现校正。 三、问题分析 先由教师讲授数字图像的基本概念(包括图像的数学化、采样、量化、灰度、各种数学图像的文件格式、表色系、颜色映像等),再通过具体的实例给学生示范对于在颜色或形状上发生畸变的图像如何通过数学的方法实现校正的过程。最后让学生动手完成对某些特殊畸变的图像的校正,写出数学原理和实验报告。 四、背景知识介绍 1. 数字图像的数值描述及分类 图像是对客观存在物体的一种相似性的生动模仿与描述,是物体的一种不完全的不精确的描述。数字图像是用一个数字阵列来表示的图像。数字阵列中的每个数字,表示数字图像的一个最小单位,称为像素。采样是将空域上或时域上连续的图像变换成离散采样点(像素)集合的一种操作。 对一幅图像采样后,若每行像素为M 个,每列像素为N 个,则图像大小为M ?N 个像素。例如,一幅640?480的图像,就表示这幅连续图像在长、宽方向上分别分成640个和480个像素。显然,想要得到更加清晰的图像质量,就要提高图像的采样像素点数,即使用更多的像素点来表示该图像。 客观世界是三维的,从客观场景中所拍摄到的图像是二维信息。因此,一幅图像可以定义为一个二维函数f(x,y),其中x,y 是空间坐标。对任何一对空间坐标(x,y)上的幅值f(x,y),成为表示图像在该点上的强度或灰度,或简称为像素值。因为矩阵是二维结构的数据,同时量化值取整数,因此,一幅数字图像可以用一个整数矩阵来表示。矩阵的元素位置(i,j),就对应于数字图像上的一个像素点的位置。矩阵元素的值f(i,j)就是对应像素点上的像素值。 值得注意的是矩阵中元素f(i,j)的坐标含义是i 为行坐标,j 是列坐标。而像素f(x,y )的坐标含义一般指直角坐标系中的坐标,两者的差异如下图: 对应于不同的场景内容,数字图像可以大致分为二值图像,灰度图像,彩色0 列坐标(j) 行坐标(i) 矩阵元素 f (i ,j) 0 纵坐标(y) 横坐标(x) 像素f(x,y) 图 1.1 矩阵坐标系与直角坐标系 6-图像畸变校正 实验五图像形状及颜色畸变的校正 一、实验目的与要求 让学生了解数字图像的数学表达及相关概念,通过实验让学生加深对数学在相关学科的应用价值的认识,培养学生的实际操作能力,并引导他们建立基础学科在处理具体问题时方法上联系。 二、问题描述 对于在颜色或形状上发生畸变的图像,通过数学的方法实现校正。 三、问题分析 先由教师讲授数字图像的基本概念(包括图像的数学化、采样、量化、灰度、各种数学图像的文件格式、表色系、颜色映像等),再通过具体的实例给学生示范对于在颜色或形状上发生畸变的图像如何通过数学的方法实现校正的过程。最后让学生动手完成对某些特殊畸变的图像的校正,写出数学原理和实验报告。 四、背景知识介绍 1.数字图像的数值描述及分类 图像是对客观存在物体的一种相似性的生动模仿与描述,是物体的一种不完全的不精确的描述。数字图像是用一个数字阵列来表示的图像。数字阵列中的每个数字,表示数字图像的一个最小单位,称为像素。采样是将空域上或时域上连续的图像变换成离散采样点(像素)集合的一种操作。 对一幅图像采样后,若每行像素为M个,每列像素为N个,则图像大小为 M?N个像素。例如,一幅640?480的图像,就表示这幅连续图像在长、宽方向 上分别分成640个和480个像素。显然,想要得到更加清晰的图像质量,就要提高图像的采样像素点数,即使用更多的像素点来表示该图像。 客观世界是三维的,从客观场景中所拍摄到的图像是二维信息。因此,一幅图像可以定义为一个二维函数f(x,y),其中x,y 是空间坐标。对任何一对空间坐标(x,y)上的幅值f(x,y),成为表示图像在该点上的强度或灰度,或简称为像素值。因为矩阵是二维结构的数据,同时量化值取整数,因此,一幅数字图像可以用一个整数矩阵来表示。矩阵的元素位置(i,j),就对应于数字图像上的一个像素点的位置。矩阵元素的值f(i,j)就是对应像素点上的像素值。 值得注意的是矩阵中元素f(i,j)的坐标含义是i 为行坐标,j 是列坐标。而像素f(x,y )的坐标含义一般指直角坐标系中的坐标,两者的差异如下图: 对应于不同的场景内容,数字图像可以大致分为二值图像,灰度图像,彩色图像三类。 1)二值图像 它是指每个像素不是黑就是白,其灰度值没有中间过度的图像。二值图像对画面的细节信息比较粗略,适合于文字信息图像的描述。它的矩阵取值非常简单,即f(i,j)=0(黑),或f(i,j)=1(白),除此之外没有其他的取值。当然,0和1表示黑或白都只是人定义的,可以人为地反过来定义。这种图像具有数据量小的优点。 2)灰度图像 列坐标(j) 行坐标(i) 矩阵元素 f (i,j) 0 纵坐标(y) 横坐标 像素图 1.1 矩阵坐标系与直角坐标系 遥感图像几何精校正 实验名称:遥感图像的几何精校正。 实验目的:1.了解和熟悉envi软件的几何校正的原理 2.熟悉和掌握envi软件的几何校正的功能和使用方法; 3.对自己的图像先找到投影,再另存一幅图像,去掉投影,在其它软件中旋转一 角度,用原先的图像作为参考对旋转后的图像进行几何校正,使得其比较精确。实验原理:几何校正,主要方法是采用多项式法,机理是通过若干控制点,建立不同图像间的多项式控件变换和像元插值运算,实现遥感图像与实际地理图件间的配准,达 到消减以及消除遥感图像的几何畸变。 多项式几何校正激励实现的两大步: 1. 图像坐标的空间变换: 有几何畸变的遥感图像与没有几何畸变的遥感图像,其对应的像元的坐标是不一 样的,如下图1右边为无几何畸变的图像像元分布图,像元是均匀且不等距的分 布。为了在有几何畸变的图像上获取无几何畸变的像元坐标,需要进行两图像坐 标系统的空间装换。 图1:图像几何校正示意图 在数学方法上,对于不同二维笛卡儿坐标系统间的空间转换,通常采用的是二元 n次多项式,表达式如下: 其中x, y为变换前图像坐标, u, v为变换后图像坐标, aij , bij为多项式系数, n = 1, 2, 3, ?。 二元n次多项式将不同坐标系统下的对应点坐标联系起来, ( x, y )和( u, v )分别应 不同坐标系统中的像元坐标。这是一种多项式数字模拟坐标变换的方法,一旦有 了该多项式,就可以从一个坐标系统推算出另一个坐标系统中的对应点坐标。 如何获取和建立二元n次多项式,即二元n次多项式系数中a和b的求解,是几何 校正成败的关键。数学上有一套完善的计算方法,核心是通过已知若干存在于不 同图像上的同名点坐标,建立求解n次多项式系数的方程组,采用最小二乘法,得出 二元n次多项式系数。 不同的二元n次多项式,反映了几何畸变的遥感图像与无几何畸变的遥感图像间的 像元坐标的对应关系, 其中哪种多项式是最佳的空间变换模拟式,能达到图像间 坐标的完全配准,是需要考虑和分析的。 在二元n次多项式数字模拟中,从提高几何校正精度的角度考虑,需要兼顾的因素 据《硅谷》杂志2012年第21期刊文称,根据鱼眼镜头成像的特点,选择合适的图像畸变校正算法,标定鱼眼图像的中心和半径,用标定得到的参数进行校正,推出校正模型,方法简单,易于实现,并对鱼眼图的畸变矫正问题提出意见与看法。 关键词:鱼眼图像;畸变矫正;图像预处理;图像增强 鱼眼图像的畸变矫正是以某种独特的变换方式将一副鱼眼图像转换为理想图像的操作,这种操作在全方位视觉导航中具有重要的作用,是系统自动识别、跟踪和定位目标所必须的基础操作。 1畸变图像的校正原理 根据畸变图像特点标定坐标图,求取标定点像素的理想值和实际值,同时生成坐标映射表,再把坐标映射表用于畸变图像的校正程序后,即可得到无畸变图像,具体处理过程如下:1)标定坐标 镜头中心的畸变可以忽略为零,以镜头为中心,离镜头越远的地方畸变越大。以镜头为中心标定坐标图,对图像进行坐标的标定,按正方形均匀排列圆点,如图1所示。 2)图像预处理 先通过图像的、突出边缘细节;然后再用二值化处理增强调节对比度的图像,但部分样板点和背景的对比的差值较大,所以是设定一个阈值对整幅图像进行二值化,最后再对二值化后的图像再次进行中值滤波的方法处理,再次使用中值滤波方法可以有效的去除畸变图像中的部分椒盐噪声的影响。二值化的主要作用是可以提高畸变校正图像的质量,预处理图像可以为点阵样板圆点中心的确定提供重要的作用。 3)圆点中心的确定 由于图像畸变的影响,经过图像预处理后的畸变校正图像仍然是不规则的实心圆,然而样板中的确定的圆点却是规则排列的,所以可以在畸变校正的样板图像上把各个圆点的重心近似的替换为圆点中心,找出一个圆点的重心作为理想畸变校正样板图像上与之对应的点,并找出该点处于二维平面坐标之中与之距离之和最大的圆点,从各个圆点的坐标之中找出与之距离之和最大的圆点坐标,该点坐标即为畸变图像中与之相对应的点的坐标。再找出理想的点阵样板图像和该畸变校正图像中各圆点中心的位置,计算出点与点之间的垂直距离,即可得到点阵样板图像中各点之间的偏移量,从而可以描绘和构建畸变校正图像上的各个点之间偏移量的曲面。最后经过图像预处理过程的样板圆点中心的确定,可计算出其它圆点中心的坐标位置。 2有关鱼眼图片的粗略校正 1)求取鱼眼图像行和列的比值 将投射生成标准圆变换为鱼眼图片并求取图片中心点的方法与普通相机照相原理不同,对于提取出来的鱼眼图片的轮廓,我们先假定一个阈值,比如设一个灰度值30,用软件勾勒描绘出校正鱼眼图片大概的轮廓,然后先求出该轮廓的中心点坐标,根据轮廓的图形和鱼眼图像的中心点的坐标,可计算出畸变图像的圆半径,从而求取鱼眼图像的中心点坐标和鱼眼图像的粗略轮廓的图像的半径相对比,以便于将鱼眼图像的大概轮廓重新调整处理,变的更为精确和直观。假定畸变校正的鱼眼图片的半径中的行坐标曲线和列坐标曲线不相等,则我们需要将畸变校正的鱼眼图像中的园的半径的曲线与下面的公式相乘,然后就可以变换为普通的标准圆的图像。下面公式中(u,v)是畸变校正的鱼眼图片的中心点,β为畸变校正的鱼眼图像行和列的比值。 2)鱼眼图片的粗略扭曲校正 在得到中心点的坐标和校正形状之后,把扭曲的鱼眼图像通过投射降低图像的扭曲程度变为正常的四方形的图像。 实验五 图像形状及颜色畸变的校正 一、 实验目的与要求 让学生了解数字图像的数学表达及相关概念,通过实验让学生加深对数学在相关学科的应用价值的认识,培养学生的实际操作能力,并引导他们建立基础学科在处理具体问题时方法上联系。 二、 问题描述 对于在颜色或形状上发生畸变的图像,通过数学的方法实现校正。 三、问题分析 先由教师讲授数字图像的基本概念(包括图像的数学化、采样、量化、灰度、各种数学图像的文件格式、表色系、颜色映像等),再通过具体的实例给学生示范对于在颜色或形状上发生畸变的图像如何通过数学的方法实现校正的过程。最后让学生动手完成对某些特殊畸变的图像的校正,写出数学原理和实验报告。 四、背景知识介绍 1. 数字图像的数值描述及分类 图像是对客观存在物体的一种相似性的生动模仿与描述,是物体的一种不完全的不精确的描述。数字图像是用一个数字阵列来表示的图像。数字阵列中的每个数字,表示数字图像的一个最小单位,称为像素。采样是将空域上或时域上连续的图像变换成离散采样点(像素)集合的一种操作。 对一幅图像采样后,若每行像素为M 个,每列像素为N 个,则图像大小为M ?N 个像素。例如,一幅640?480的图像,就表示这幅连续图像在长、宽方向上分别分成640个和480个像素。显然,想要得到更加清晰的图像质量,就要提高图像的采样像素点数,即使用更多的像素点来表示该图像。 客观世界是三维的,从客观场景中所拍摄到的图像是二维信息。因此,一幅图像可以定义为一个二维函数f(x,y),其中x,y 是空间坐标。对任何一对空间坐标(x,y)上的幅值f(x,y),成为表示图像在该点上的强度或灰度,或简称为像素值。因为矩阵是二维结构的数据,同时量化值取整数,因此,一幅数字图像可以用一个整数矩阵来表示。矩阵的元素位置(i,j),就对应于数字图像上的一个像素点的位置。矩阵元素的值f(i,j)就是对应像素点上的像素值。 值得注意的是矩阵中元素f(i,j)的坐标含义是i 为行坐标,j 是列坐标。而像素f(x,y )的坐标含义一般指直角坐标系中的坐标,两者的差异如下图: 对应于不同的场景内容,数字图像可以大致分为二值图像,灰度图像,彩色 列坐标(j) 行坐标(i) 矩阵元素 f (i ,j) 0 纵坐标(y) 横坐标(x) 像素f(x,y) 图 1.1 矩阵坐标系与直角坐标系 图像畸变校正OPENCV 使用USB摄像头,采集一副图像,然后对图像畸变校正。摄像头事先标定好 #include "cv.h" #include "highgui.h" #include "cxcore.h" #include "cvcam.h" //图像的像素直接提取 #define _I(img,x,y) ((unsigned char*)((img)->imageData + (img)->widthStep*(y)))[(x)] //亚像素级灰度值 #define _IF(image,x,y) ( ((int)(x+1)-(x))*((int)(y+1)-(y))*_I((image),(int)(x),(int)(y)) + ((int )(x+1)-(x))*((y)-(int)(y))*_I((image),(int)(x),(int)(y+1)) + ((x)-(int)(x))*((int)(y+1)-(y))*_I((imag e),(int)(x+1),(int)(y)) + ((x)-(int)(x))*((y)-(int)(y))*_I((image),(int)(x+1),(int)(y+1)) )//插值后的像素值(IN表示interpolation),x、y可以为小数 void callback(IplImage* image); void main() { int ncams = cvcamGetCamerasCount( );//返回可以访问的摄像头数目 HWND mywin; cvcamSetProperty(0, CVCAM_PROP_ENABLE, CVCAMTRUE); cvcamSetProperty(0, CVCAM_PROP_RENDER, CVCAMTRUE); mywin = (HWND)cvGetWindowHandle("cvcam window"); cvcamSetProperty(0, CVCAM_PROP_WINDOW, &mywin); cvcamSetProperty(0, CVCAM_PROP_CALLBACK, callback); //cvcamGetProperty(0, CVCAM_VIDEOFORMA T,NULL); cvNamedWindow( "径向矫正1", 1 );//创建窗口 cvNamedWindow( "径向矫正2", 1 );//创建窗口 cvcamInit( ); cvcamStart( ); cvWaitKey(0); cvcamStop( ); cvcamExit( ); cvDestroyWindow( "径向矫正1" );//销毁窗口 cvDestroyWindow( "径向矫正2" );//销毁窗口 数字图像处理 图像畸变及校正 1 图像畸变介绍 从数字图像处理的观点来考察畸变校正, 实际上就是一个图像恢复的过程, 就是对一幅退化了的图像进行恢复。在图像处理中,图像质量的改善与校正技术,也就就是图像复原,当初就是在处理从人造卫星发送回来的劣质图像的过程中发展、完善的。目前,图像畸变校正的应用领域越来越广,几乎所有涉及应用扫描与成像的领域都需要畸变校正。图像在生成与传送的过程中,很可能会产生畸变,如:偏色、模糊、几何失真、几何倾斜等等。前几种失真主要就是体现在显示器上,而后一种失真则多与图像集角度有关。不正确的显影,打印、扫描,抓拍受反射光线的影响等方式,都会使图像产生偏色现像。模糊、几何畸变主要就是在仪器采集图片过程中产生,大多就是因机器故障或操作不当影响导致,如在医学成像方面。而几何空间失真广泛存在于各种实际工程应用中,尤其就是在遥感、遥测等领域。 2 畸变产生的原因 在图像的获取或显示过程中往往会产生各种失真(畸变):几何形状失真、灰度失真、颜色失真。引起图像失真的原因有:成像系统的象差、畸变、带宽有限、拍摄姿态、扫描非线性、相对运动等;传感器件自身非均匀性导致响应不一致、传感器件工作状态、非均匀光照条件或点光源照明等;显示器件光电特性不一致;图像畸变的存在影响视觉效果,也就是影响图像检测系统的形状检测与几何尺寸测量精度的重要因素之一。 3图像畸变校正过程所用到的重要工具 灰度直方图就是关于灰度级分布的函数,就是对图象中灰度级分布的统计。灰度直方图就是将数字图象中的所有像素,按照灰度值的大小,统计其所出现的频度。通常,灰度直方图的横坐标表示灰度值,纵坐标为想像素个数。直方图上的一个点的含义就是,图像存在的等于某个灰度值的像素个数的多少。这样通过灰度直方图就可以对图像的某些整体效果进行描述。从数学上讲,图像的灰度直方图就是图像各灰度值统计特征与图像灰度值出现的频率。从图形上来讲,它就是一个一维曲线,表征了图像的最基本的统计特征。 作为表征图像特征的信息而在图像处理中起着重要的作用。由于直方图反映了 畸变校正实现 1.相机标定 在计算机视觉中,通过相机标定能够获取一定的参数,其原理是基于三大坐标系(摄像机坐标系、图像坐标系和世界坐标系)之间的转换和摄像机的畸变参数矩阵。目前经常用张正友标定法,进行摄像机标定,获取到内参数矩阵和外参数矩阵以及畸变参数矩阵。 1.1三大坐标系 1)图像坐标系 在计算机系统中,描述图像的大小是像素,比如图像分辨率是1240*768.也就是以为图像矩阵行数1024,列数768。图像的原点是在图像的左上角。 以图像左上角为原点建立以像素为单位的坐标系u-v。像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数。这是像素坐标,而不是图像坐标系,为了后续的模型转换,有必要建立图像坐标系。 图像坐标系是以图像中心为原点,X轴和u轴平行,Y轴和v轴平行。dx和dy 表示图像中每个像素在X轴和Y轴的物理尺寸,其实就是换算比例。比如图像大小是1024*768,图像坐标系x-y中大小为19*17.那么dx就是19/1024。 2)相机坐标系 相机成像的几何关系可由图2.2表示。其中O点为摄像机光心(投影中心),Xc 轴和Yc轴与成像平面坐标系的x轴和y轴平行,Zc轴为摄像机的光轴,和图像平面垂直。光轴与图像平面的交点为图像的主点O1,由点O与Xc,Yc,Zc轴组成的直角坐标系称为摄像机的坐标系。OO1为摄像机的焦距。 3)世界坐标系 世界坐标系是为了描述相机的位置而被引入的,如图2.2中坐标系OwXwYwZw即为世界坐标系。平移向量t和旋转矩阵R可以用来表示相机坐标系与世界坐标系的关系。所以,假设空间点P在世界坐标系下的齐次坐标是(Xw,Yw,Zw,1)T,(这 遥感图像几何精校正、辐射校正 实验名称:遥感图像的几何精校正。 实验目的:1.了解和熟悉envi软件的几何校正的原理 2.熟悉和掌握envi软件的几何校正的功能和使用方法; 3.对自己的图像先找到投影,再另存一幅图像,去掉投影,在其它软 件中旋转一 角度,用原先的图像作为参考对旋转后的图像进行几何校正,使得其 比较精确。 实验原理:几何校正,主要方法是采用多项式法,机理是通过若干控制点,建立不同图像间的多项式控件变换和像元插值运算,实现遥感图像与实际 地理图件间的配准,达到消减以及消除遥感图像的几何畸变。 多项式几何校正激励实现的两大步: 1. 图像坐标的空间变换: 有几何畸变的遥感图像与没有几何畸变的遥感图像,其对应的像元的 坐标是不一样的,如下图1右边为无几何畸变的图像像元分布图,像 元是均匀且不等距的分布。为了在有几何畸变的图像上获取无几何畸 变的像元坐标,需要进行两图像坐标系统的空间装换。 图1:图像几何校正示意图 在数学方法上,对于不同二维笛卡儿坐标系统间的空间转换,通常采 用的是二元n次多项式,表达式如下: 其中x, y为变换前图像坐标, u, v为变换后图像坐标, aij , bij为多项式 系数, n = 1, 2, 3, ?。 二元n次多项式将不同坐标系统下的对应点坐标联系起来, ( x, y )和( u, v )分别应不同坐标系统中的像元坐标。这是一种多项式数字模拟坐标 变换的方法,一旦有了该多项式,就可以从一个坐标系统推算出另一个 坐标系统中的对应点坐标。 如何获取和建立二元n次多项式,即二元n次多项式系数中a和b的求 解,是几何校正成败的关键。数学上有一套完善的计算方法,核心是通 过已知若干存在于不同图像上的同名点坐标,建立求解n次多项式系 数的方程组,采用最小二乘法,得出二元n次多项式系数。 不同的二元n次多项式,反映了几何畸变的遥感图像与无几何畸变的遥 感图像间的像元坐标的对应关系, 其中哪种多项式是最佳的空间变 换模拟式,能达到图像间坐标的完全配准,是需要考虑和分析的。 第19卷 第1期2011年1月 光学精密工程 Optics and P recision Engineering V ol.19 N o.1 Jan.2011 收稿日期:2009-11-26;修订日期:2010-03-29. 基金项目:吉林省科技发展计划基金资助项目(N o.20070304) 文章编号 1004-924X(2011)01-0161-07 平面几何测量中的图像畸变校正 苏成志,王恩国,郝江涛,曹国华,徐洪吉 (长春理工大学机电工程学院,吉林长春130022) 摘要:针对图像畸变对平面图像几何线度精密测量精度的影响,提出一种直接利用标准网格板作为测量基准的畸变校正方法。根据待测物体与网格板处于相同物面时,其图像畸变与网格板图像畸变相同,待测点在网格板图像中相对网格的几何位置不变这一性质,提出直接使用发生畸变的网格板图像作为校正基准来代替通过建模将外部标准转换为摄像机内部基准的畸变校正思路。首先,确定待测点在网格板畸变图像中的初始位置;然后,根据平行线分线段成比例定理确定待测点在网格板畸变图像网格内的精确位置,对两者求和完成待测物体上任意两点的实际几何线度测量。实验证明,当校正网格板间距为1mm,精度为0.2L m 时,使用提出方法得到的畸变误差是现有校正方法的20%,校正精度可达4L m 。该方法省去了建模过程,其校正精度仅与网格板精度有关,具有更高的精度和适应性。关 键 词:平面图像测量;图像畸变;校正基准;建模校正 中图分类号:T P391.4 文献标识码:A doi:10.3788/O PE.20111901.0161 Distortion correction for images in planar metrology SU Cheng -zhi,WANG En -g uo ,H AO Jiang -tao,CA O Guo -hua,XU H ong -ji (College of M echanical and Electric E ng ineer ing ,Changchun Univer sity of Science and T echnology ,Chang chun 130022,China) Abstract:In consider ation of the effect of the distor tion error o f an im age on the accuracy of planar ge -o metr ical m easurement in the precise visual m etrolo gy,a metho d to correct the imag e disto rtio n by u -sing standard g rid bo ard dir ectly as measur em ent calibration is pro posed.As the position of an under -tested po int is unchanged relativ e to that of g rid board w hen an under -tested object and a grid board lay o n the sam e object plane,the g rid board is directly used as the co rrecting calibratio n of image dis -to rtio n instead of the w ay that converts the ex ternal standard into the intrinsic param eter o f a camera by modeling .Firstly,the pr im ar y po sition o f the under -tested po int in the imag e of grid board is deter -m ined;then,its fine distance is decided acco rding to the pr opo rtio n theorem of line segm ent divided by parallel line.Finally,planar geometrical m easurement is fulfilled by calculating the sum of both dis -tances.Ex perim ental results show that the distor tion er ror by the proposed m ethod has reduced to 20%that of the tr aditional m ethod and the co rrectoin accur acy of imag e has reached 4L m or higher,w hile the distance of intersection po int of the calibrated gr id bo ar d is 1m m and its accuracy is 0.2L m.The method is more applicable and has high accuracy,for it om its the mo deling and its accuracy o nlyENVI中的几何校正
鱼眼图像畸变校正算法
数码相机设计中图像几何畸变校正的实现
数字图像处理-畸变校正
图像畸变校正
6-图像畸变校正
最新6-图像畸变校正汇总
遥感图像几何精校正实验报告
鱼眼图像畸变校正算法
图像畸变校正word版
图像畸变校正程序一
数字图像处理畸变校正
畸变校正
大气校正,几何校正 简单教程
平面几何测量中的图像畸变校正