公路全球定位系统GPS测量规范
1 总则
1.0.1 为规定利用全球定位系统﹙Global Positioning System, 缩写为 GPS﹚建立公路工程GPS 测量控制网的原则﹑精度和作业方法,特制定本规范。
1.0.2 本规范是依据《公路勘测规范》﹙JTJ 061),并参照《全球定位系统(GPS)测量规范》(CH 2001-92)的有关规定, 在收集﹑分析﹑研究和总结经验的基础上制定的。
1.0.3 本规范适用于新建和改建公路工程项目的各级GPS控制网的布设与测量。
1.0.4 采用全球定位系统测量技术建立公路平面控制网时,应根据《公路勘测规范》(JTJ 061)中规定的平面控制测量的等级﹑精度等确定相应的GPS控制网的等级。
1.0.5 GPS测量采用WGS-84大地坐标系。当公路工程GPS控制网根据实际情况采用1954年北京坐标系﹑1980西安坐标系或抵偿坐标系时,应进行坐标转换。各坐标系的地球椭球基本参数﹑主要几何和物理常数见附录A.
高程系统根据实际情况可采用1956年黄海高程系或1985国家高程基准.
1.0.6 GPS测量时间系统为协调世界时(UTC). 在作业过程中,附录D "GPS观测手薄" 中的开﹑关机时间可采用北京时间记录.
1.0.7 GPS接收机及附属设备均按有关规定定期检测.
1.0.8 GPS控制测量应按有关规定对全过程进行质量控制.
1.0.9 在提供GPS控制测量成果资料时,应执行保密制度中的有关规定.
2 术语
2.0.1 基线Baseline
两测量标志中心的几何连线。
2.0.2 观测时段 Observation session
GPS 接收机在测站上从开始接收卫星信号进行观测到停止观测的时间长度。
2.0.3 同步观测 Simultaneous observation
两台或两台以上GPS接收机同时对一卫星进行的观测。
2.0.4 同步观测环 Simultaneous observation
三台或三台以上GPS接收机同步观测所获得的基线向量构成的闭合环。
2.0.5 独立基线 Independent baseline
由独立观测时段所确定的基线。
2.0.6 独立观测环 Independent observable loop
由独立基线向量构成的闭合环。
2.0.7 自由基线 Free baseline
不属于任何非同步图形闭合条件的基线。
2.0.8 复测基线 Duplicate measure baseline
观测两个或两个以上观测时段的基线。
2.0.9 边连式 Link method by a baseline
相邻图形之间以一条基线边相连接的布网方式。
2.0.10 无约束平差 Non-constrained adjustment
在一个控制网中,不引入外部基准,或虽引入外部基准但并不产生控制网非观测误差引起的变形和改正的平差方法。
2.0.11 公路抵偿坐标系 Compensation coordinate system for highway
在建立公路控制网时,根据需要投影到抵偿高程面上和(或)以任一子午线为中央子午线的一种直角坐标系。
2.0.12 首级控制网 First class control network
为一个公路工程项目而建立的精度等级最高,并同国家控制
点联测能控制整个路线的控制网。
2.0.13 主控制网 Main control network
为满足公路测设放线或施工放样,在首级控制网基础上加密
并贯通整条公路的控制网。
2.0.14 天线高 Antenna height
观测时天线平均相位中心标志面的高度。
3 GPS 控制网分级与设计
3.1 GPS 控制网分级
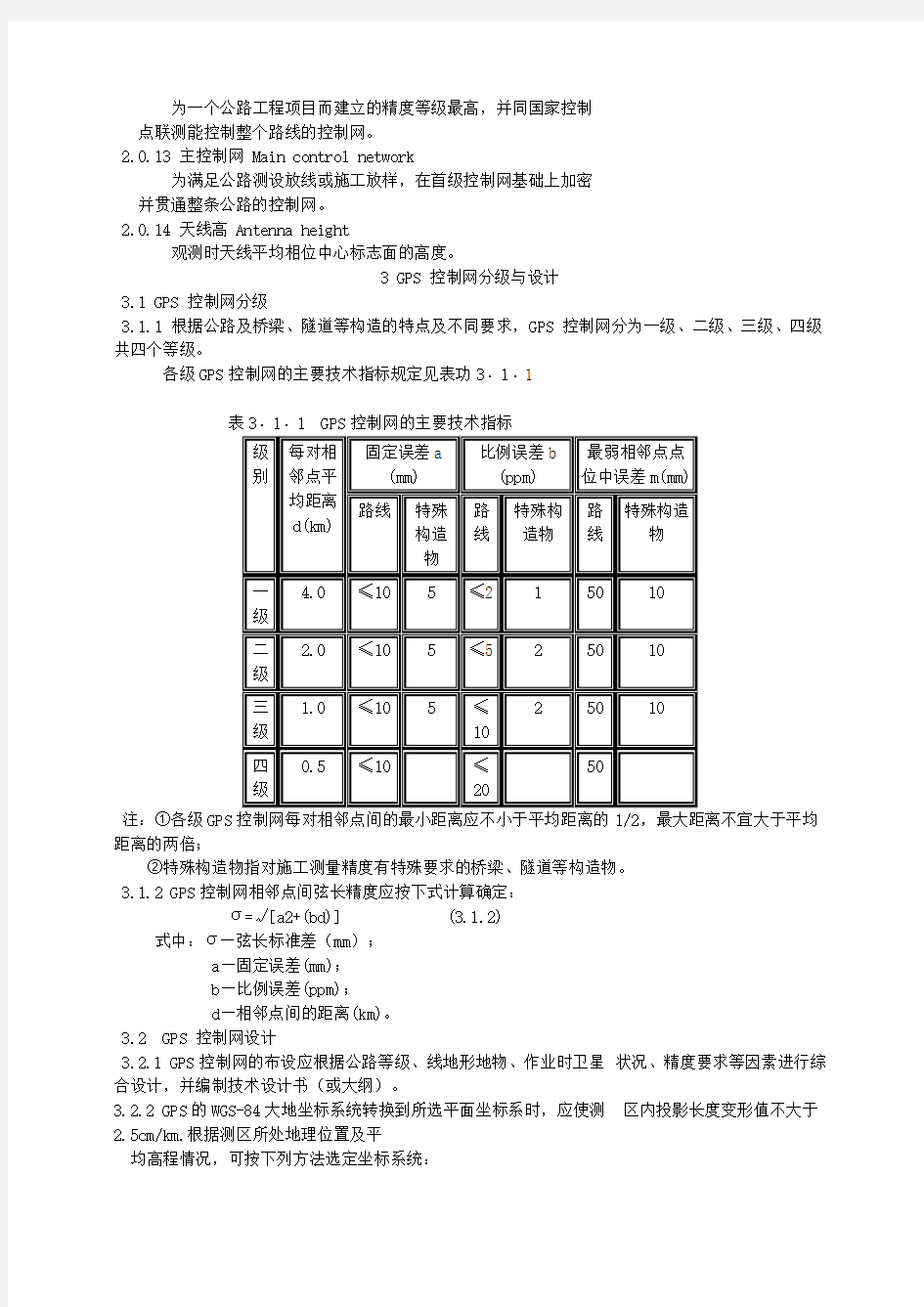
3.1.1 根据公路及桥梁﹑隧道等构造的特点及不同要求,GPS 控制网分为一级﹑二级﹑三级﹑四级共四个等级。
各级GPS控制网的主要技术指标规定见表功3﹒1﹒1
表3﹒1﹒1 GPS控制网的主要技术指标
注:①各级GPS
距离的两倍;
②特殊构造物指对施工测量精度有特殊要求的桥梁﹑隧道等构造物。
3.1.2 GPS控制网相邻点间弦长精度应按下式计算确定:
σ=√[a2+(bd)] (3.1.2)
式中:σ—弦长标准差(mm);
a—固定误差(mm);
b—比例误差(ppm);
d—相邻点间的距离(km)。
3.2 GPS 控制网设计
3.2.1 GPS控制网的布设应根据公路等级﹑线地形地物﹑作业时卫星状况﹑精度要求等因素进行综合设计,并编制技术设计书(或大纲)。
3.2.2 GPS的WGS-84大地坐标系统转换到所选平面坐标系时,应使测区内投影长度变形值不大于2.5cm/km.根据测区所处地理位置及平
均高程情况,可按下列方法选定坐标系统:
3.2.2.1 当投影长度变形值不大于2.5cm/km时,采用高斯正形投影3°带平面直角坐标系。
3.2.2.2 当投影长度变形值大于2.5cm/km时,可采用公路抵偿坐标系,并可选用下列方式:
(1)投影于1954年北京坐标系或者1980西安坐标系椭球面上的高斯正形投影任意带平面直角坐标系。
(2)投影于抵偿高程面上的高斯正形投影3°带平面直角坐标系。
(3)投影于抵偿高程面上的高斯正形投影任意带平面直角坐标系。
3.2.3 GPS控制网采用公路抵偿坐标系进行坐标转换时,应确定以下技术参数;
--参考椭球及其相应的基本参数;
--中央子午线经度值;
--纵横坐标的加常数值;
--投影面正常高;
--测区平均高程异常值;
--起算点坐标及起算方位角。
公路抵偿坐标系所采用的椭球中心、轴向和扁率应与国家参考椭球相同。
3.2.4 公路路线过长时,可视需要将其分为多投影带。在各分带交界附近应布设一对相互通视的GPS 点。
3.2.5 同一公路工程项目中的特殊构造物的测量控制网应同项目测量控制网一次完成设计、施测与平差。
当特殊构造物测量控制网的等级要求高时,宜以其作为首级控制网,并据以扩展其它测量控制网。
3.2.6 当GPS 控制网作为公路首控制网,且需采用其它测量方法进行加密时,应每隔离5km设置一对相互到通视的GPS点。
当GPS首级控制网直接作为施工控制网时,每个GPS点至少应与一个相邻点通视
3.2.7 设计GPS控制网时,应由一个或若干个独立观测环构成,并包含较多的闭合条件。
3.2.8 GPS 控制网由同步GPS观测边构成多边形闭合环或附合路线时,其边数应符合下列规定:
--一级GPS控制网应不超过去5条;
--二级GPS控制网应不超过去6条;
--三级GPS控制、网应不超过去7条;
--四级GPS控制网应不超过去8条;
3.2.9 一、二级GPS 控制网应采用网连式、边连式布网;三、四级GPS控制网宜采用铰链导线式或点连式布网。
GPS控制网中不应出现自由基线。
3.2.10 GPS控制网应同附近等级高的国家平面控制网点联测,联测点数应不少于3个,并力求分布均匀,且能控制本控制网。当GPS控制网较长时,应增加联测点的数量。
路线附近具有等级高的GPS点时,应予以联测。
同一公路工程项目的GPS控制网分为多个投影带时,在分带交界附近应同国家平面控制点联测。
3.2.11 GPS点需要进行高程联测时,可采用使GPS点与水准点重合,或GPS点与水准点联测的方法。
平原、微丘地形联测点的数量不宜少于6个,必须大于3个;联测点的间距不宜大于20km,且应均匀分布。
重丘、山岭地形联测点的数量不宜少于是10个。
各级GPS控制网的高程联测应不低于四等水准测量的精度要求。
4 选点与埋石
4.1 准备
4.1.1在编制技术设计书(或大纲)前应搜集与公路工程有关的以下资料:
--测区划1:10000-1:150000地形图;
--既有各类控制测量资料,包括控制点的平面坐标、高程、坐标系统、技术总结等;
--测区的气象、地质、地形、地貌、交通、通信及供电等资料;
--路线走向、线位布设、路线设计数据及大型构造物位置等资
料。
4.1.2按技术设计书(或大纲)要求,进行GPS控制网技术设计。
4.2 选点
4.2.1 选点员应按技术要求进行踏勘,并实地核对、调整、
确定点位。点位应有利于采用其它测量方法扩展和联测。对需做水准联测的点位还应踏勘水准路线。
4.2.2 点位应选在基础稳定,并易于长期保存的地点。
4.2.3 点位应便于安置接收设备和操作,视野开阔,视场内不应有高度角大于15°的成片障碍物,否则应绘制点位环视图。
4.2.4 点位附近不应有强烈干扰卫星信号接收的物体。点位距大功率无线电发射源(如电视台、微波站等)的距离应不小于400m;距220Kv以上电力线路的距离应不小于50m。
4.2.5 点位应利于公路勘测放线与施工放样,且距路线中心线不宜小于50m,并不大于300m。对于大型桥梁、互通式立交、隧道等还应考虑加密布设控制网的要求。
4.2.6 GPS控制点需要设方位点时,其目标应明显,便于观测;与 GPS点的距离不宜小于500m,且与路线垂直。
4.2.7 GPS控制网的点名应沿公路前进方向顺序编号,并非编号前冠以“GPS”字样和等级。当新点同原有点重合时,应采用原有点名。
同一个GPS控制网中禁有相同的点名。
4.2.8 选定的点位应标注于1:10000或1:50000的地形图上,并绘制GPS控制网选点图,填写GPS 点之记,点之记格式见附录B。
4.3 埋石
4.3.1 各级GPS点的标石均应有中心标志。中心标志用直径不小于14mm的钢筋制作,并用清晰、精细的十字线刻成直径小于1mm的中心点。标石表面应有GPS点名及施测单位名称。
4.3.2 GPS点的标石可按附录C预制,亦可现场浇制。埋设时坑底应填以砂石并固密实,或现浇20cm 厚的混凝土。埋设的GPS点应待沉降稳定后方可使用。
4.3.3 GPS点位于山区岩石地段时,可利用基岩凿成坑穴,埋入中心标志并浇灌混凝土。标石顶端外形尺寸应符合附录C的规定。
4.3.4 GPS点位于耕作地区时,应埋设于非耕种地上,并露出地面少许;当必须埋设于耕地时,标石顶面应埋设于耕种表土层以下。对冰冻地区,其埋设深度应大于该地区的冰冻深度。
4.3.5 GPS点位于沙丘或土层疏松地区,应适当增大标石尺寸和基坑底层现浇混凝土的面积与厚度。
4.3.6 当有牢固永久性建筑物可用以设置标石时,可在建筑物上凿孔埋入中心标志并浇灌混凝土,其顶端外形尺寸应符合附录C的规定。
4.3.7 利用原有平面控制点时,应确认该点标石完好,并符合同级GPS点观测与埋石要求,且能长期保存。
4.3.8 为特殊构造物而设计的一、二级GPS控制网可视需要埋设有强制对中装置的观测墩。
4.3.9 所有GPS点在埋石处应设置明显的指向标志,并现场绘制交通路线略图,填写点之记。
5 观测
5.1 技术指标
5.1.1 GPS控制网观测基本技术指标规定见表5.1.1。
表5.1.1 GPS控制网观测基本技术指标。
5.2 观测计划
5.2.1 进入测区前,应事先编制GPS卫星可见性预报表。预报表应包括可见卫星号﹑卫星高度角﹑方位角﹑最佳观测星组﹑最佳观测时间﹑点位图形强度因子﹑概括位置坐标﹑预报历元﹑星历龄期等。
5.2.2 观测作业前,应根据接收机台数﹑GPS图形﹑卫星可见性预报表编制观测计划。在实施中,应依照实际作业情况,及时作出调整。
5.2.3 观测作业后,应及时绘制联测草图以备后续作业调度使用。
5.3 作业要求
5.3.1 观测组必须执行调度计划,按规定的时间进行同步观测作业。
5.3.2 观测人员必须按照GPS接收机操作手册的规定进行观测作业。
5.3.3 天线安置在脚架上直接对中整平时,对中精度为1mm.
5.3.4 天线安置在觇标上时,应将标志中心投影至基板上,然后在基板上对中整平。如觇标顶部对信号和信息有干扰,则应卸去。
5.3.5 每时段观察应在测前﹑测后分别量取天线高。两次天线高之差应不大于3mm,并取平均值作为天线高。
5.3.6 观测时应防止人员或其它物体触动天线或遮挡信号。
5.3.7 接收机开始记录数据后,应随时注意卫星信号和信息存储情况。当接收或存储出现异常时,应随时进行调整,必要时应及时通知其它接收机以调整观测计划。
5.3.8 在现场应按规定作业顺序填写观测手簿,不得事后补记。观测手簿的格式见附录D。
5.3.9 经检查所有规定作业项目全部完成,且记录完整无误后方可迁站。
5.3.10 每日观测结束后,应将外业数据文件及时转存到磁盘上,不得作任何剔除或删改。磁盘应贴好标签,并妥善保存。
6 基线解算与检核
6.0.1 外业观测结束后及时进行观测数据的处理和质量分析,检查其是否符合规范或技术设计要求。
6.0.2 基线解算中所需的起算点坐标,可按下列顺序选用:
--国家或其它等级高的GPS控制网点的既有WGS--84坐标值;
--国家或其它等级高的控制点转换至WGS—84的坐标值;
-- GPS单点定位观测2h以上的平差值提供的WGS--84坐标值。
6.0.3 当GPS控制网点间距离小于20km时,可不考虑对流层和电离层的修正;当大于20km时,每时段应于始﹑中﹑终各观测一次气象元素,并采用标准模型加入对流层和电离层的修正。
6.0.4 采用M台接收机同步观测时,每一时段应解算出M(M-1)/2条GPS基线向量边,并计算出该观测时间段的同步环坐标分量闭合差。当各基线的同步观测时间超过观测时间的80/100时,其闭合差值应符合式(6.0.4-1)-(6.0.4-4)的要求。
Wx≤(√n/5) ·σ(6﹒0﹒4-1)
Wy≤(√n/5) ·σ(6﹒0﹒4-2)
Wz≤(√n/5) ·σ(6﹒0﹒4-3)
W =√Wx2+ Wy2+Wz2≤(√3n/5) ·σ(6﹒0﹒4-4)
式中:W—同步环坐标分量闭合差(mm);
σ—弦长标准差(mm);
n --同步环中的边数。
当各基线同步观测时间为观测时间性段的40/100-80/100时,其同步环坐标分量闭合差可适当放宽。
当各基线同步观测时间少于观测时间段的40/100时,应按异步环处理。
6.0.5 由独立观测边组成的异步环的坐标分量闭合差应符合式
(6﹒0﹒5-1)- (6﹒0﹒5-4)的规定:
Vx≤3√n·σ(6﹒0﹒5-1)
Vy≤3√n·σ(6﹒0﹒5-2)
Vz≤3√n·σ(6﹒0﹒5-3)
V≤3√3n·σ(6﹒0﹒5-4)
式中:V—异步环坐标分量闭合差(mm);
σ—弦长标准差(mm);
n –异步环中的边数。
6.0.6 同一条边任意两个时段的成果互差,应小于GPS接收机标准精度的2√2倍。
6.0.7 当网中有两个或两个以上已知点时,应按本规范第6﹒0﹒5条的规定计算已知点之间的附合闭合差。
6.0.8 当检查或数据处理时发现观测数据不能满足要求,应对成果进行全面的分析,并对其中部分数据进行补测或重测,必要时全部数据应重测。
7 GPS控制网平差计算
7.0.1 平差时应首先以一个点的WGS-84系坐标作为起算依据进行无约束平差,检查GPS基线向量网本身的内符合精度、基线向量间有无明显的系统误差,并剔除含有粗差的基线边。
7.0.2 当用M台接收机同步观测时,应从计算出的M(M-1)/2条GPS观测边中选取(M-1)条边参加GPS网平差计算。选取的原则是:
--独立的观测边;
--网形构成非同步闭合环,不应存在自由基线;
--必须不含明显的系统误差;
--组成的闭合环基线数和异步环长度应尽量小。
7.0.3 在进行GPS控制网平差前,应根据实际需要选定起算数据和相应的地面坐标,并应对起算数据的可靠性及精度进行检查分析。
7.0.4 GPS控制网可以采用三维约束平差或二维约束平差法。
约束平差时,约束点的坐标、距离或方位角可作为强制约束的固定值,也可作为加权观测值。
当采用三维约束平差时,可只假定一个点的大地作为高程起算数据。
当采用二维约束平差时,应先将三维GPS基线向量转换为二维基线向量。
7.0.5 当GPS控制网分为多个投影带,且在分差交界附近联测国家控制点时,可分片进行平差。平差时应有一定数量的重合点,重合点位互差不得大于两倍的点位中误差。
7.0.6 平差结果应输出所选直角坐标的三维或二维坐标、基线向量改正数、基线长、方位、点位精度、转换参数及其精度,并同时输出单位权中误差及其它要求输出的内容。
7.0.7 为计算GPS控制网点的正常高,先利用已联测高程的GPS点正常高和经GPS控制网平差得到的大地高,求其高程异常值,然后采用拟合或插值等方法求其它 GPS点的高程异常值和正常高。
7.0.8 计算结束后,应对所处理的数据及结果进行分析,并写入总结报告。
8 成果验收与资料提交
8.0.1 GPS测量工作结束后应编写技术总结,并按《测绘产品检查验收规定》(CH 1002—95)和《测绘产品质量评定标准》(CH1003—95)的要求进行验收。
8.0.2 GPS测量工作技术总结应包括:
--任务来源、项目名称、施测目的、施测单位及施量起讫时间,参加作业人员、工作量及作业简况;
--作业依据及技术精度要求;
--测区范围与位置、测区概况,测区已有测量资料情况及检核、采用情况;
--GPS接收机型号、数量及相应的技术参数,仪器检验情况等;
--坐标系统与起算数据的选定及相应的参数;
--选点、埋石情况;
--野外观测方案、作业中的问题、观测成果检查以及执行技术规定情况;
--观测数据质量分析与野外检核计算情况;
--数据处理软件以及处理过程说明;
--平差计算和精度分析;
--存在问题和需要说明的问题;
--各种附表和附图。
8.0.3 成果验收的重点:
--接收机检验方法和结果;
--GPS控制网网形设计与联测图;
--GPS控制网的布设应满足公路路线及大型构造物勘察设计与施工放样的要求;
--起算数据和坐标系统的选择;
--野外资料的检核与计算;
--数据处理、平差过程及其成果精度。
8.0.4 提交的资料应包括:
--测量任务书和技术设计书(或大纲);
--GPS接收机检验资料;
--卫星可见性预报和观测计划;
--GPS坐标成果表;
--点之记;
--观测手簿和存储介质(包括数据处理过程中生成的文件);
--平差计算资料和成果磁盘;
--GPS联测示意图;
--标注有GPS点位的1:10000或者1:50000地形图;
--所使用的原始资料;
--技术总结和成果验收报告。
附录A 大地坐标系有关资料
A1 WGS-84大地坐标系的地球椭球基本参数、主要几何和物理常数 A1.1 地球椭球基本参数
长半径a=6378137m
地球引力常数(含大气层)GM=3986005×108m3s-2
正常化二阶带谐系数C2.0=-484.16685×10-6
地球自转角速度w=7292115×10-11rads-1
A1.2 主要几何和物理常数
短半径b=6356752.3142m
扁率a=1/298.257223563
第一偏心率平方e2=0.00669437999013
第二偏心率平方e2=0.006739496742227
椭球正常重力位u0=62636860.8497m2s-2
赤道正常重力ye=9.9703267714ms-2
A2 1980西安坐标系的参考椭球基本参数、主要几何和物理常数
A2.1 参考椭球基本参数
长半径a=6378140m
地球引力常数(含大气层)GM=3986005×108m3s-2
二阶带谐系数J2=1082.63×10-6
地球自转角速度w=7292115×10-11rads-1
A2.2 主要几何和物理常数
短半径b=6356755.2882m
扁率a=1/298.257
第一偏偏心率平方e2=0.00669438499959
第二偏偏心率平方e2=0.00673950181947
椭球正常重力位u0=62636830m2s-2
赤道正常重力y0=9.780318m s-2
A3 1954年北京坐标系参考椭球的基本几何参数
长半径a=6378245m
短半径b=6356863.0188m
扁率a=1/298.3
第一偏心率平方e2=0.006693421622966
第二偏心率平方e2=0.006738525414683
附录B GPS点之记
工程名称:
调制:校核:
附录D GPS观测手簿工程名称:
一、本规范条文,要求执行的严格程度的用词,说明如下:
1.表示很严格,非这样做不可的用词:
正面词一般采用“必须”;
反面词一般采用“严禁”。
2.表示严格,在正常情况下均应这样做的用词:
正面词一般采用“应”;
反面词一般采用“不应”或“不得”。
3.表示允许稍有选择,在条件可时首先应这样做的用词:
正面词一般采用“宜”或“可”;
反面词一般采用“不宜”。
二、条文中指明应按其他有关标准、规范执行的写法为:
“应按……执行”或“应符合……要求或规定”。非必须按所指定的标准、规范或其他规定执行的写法为:“可参照……”。
附件《公路全球定位系统(GPS) 测量规范》
(JTJ/T 066-98)
条文说明
1﹒总则
1.0.1 自1980年第一台商ET用GPS接收机问世以来,随着GPS工作卫星的不断入轨和GPS接收机性能的不断提高和改进,GPS测量技术已广泛应用于我国国民经济建设的各个部门。公路测设部门是80年代后期开始运用GPS测量技术的。由于公路建设的特点,无论是在测量原则,还是在测量精度和作业方法等方面均有别于其它行业。因此,为了将GPS商量技术更好地应用于公路工程建设,有必要制定本规范。
目前GPS测量技术在公路测设中主要用于建立公路工程测量控制网。最近推出RTK方法后虽可使运用范围扩大,但由于尚处于推广阶段,故本规范规定的应用范围是公路测量控制网的布设与测量。
作为建立公路测量控制网的主要手段之一,GPS定位技术应用于公路建设的主要方法是静态相对定位及快速静态定位。因为这两种方法能够获得高精度的定位,故本规范规定了按静态相对定位及快速静态定位建立测量控制网的方法。
1.0.4 《公路勘测规范》(JTJ 061)中根据公路等级及所需的测量精度等规定了相应的控制测量等级。GPS测量作为建立公路测量控制网的有效手段之一,为保证各规范间的衔接和一致,GPS控制网的等级是根据《公路勘测规范》(JTJ 061)中相对应的具体规定确定的。
1.0.6 GPS测量的时间系统采用协调世界时(UTC),而实际作业人员为调度方便起见,一般在记录时采用北京标准时(BST)。因此本规范规定在“GPS观测手簿”中的有关观测作业计划及开关机时间可采用北京标准时(BST)。两者可用BST=UTC+8h式进行换算。
3 GPS控制网分极与设计
3.1.1 GPS控制网分级
GPS测量技术具有精度高、灵活性强等特点,各等级的观测方法和观测时间没有很大差异,但为了和《公路勘测规范》(JTJ061)相适应,根据公路勘测的特点,将GPS控制网分为一、二、三、四级共四个等级。
GPS控制网与《公路勘测规范》(JTJ 061)中公路平面控制测量等级关系见表3.1.1。
表3.1.1 GPS控制网与公路平面控制测量等级关系
GPS控制网等级与主要技术指标中有关每对相邻点间的平均距离,是根据公路勘测中的实际情况确定的。如四级GPS控制网主要是直接作为高速公路的施工控制网,其平均距离规定为500m较为适宜;三级GPS控制网主要是作为高速公路的首级控制网,测设时还需在此基础上加密低一级控制网,GPS控制网中的点作为加密低一级控制网的起算数据,其每对相邻点间的平均距离规定为1km较为适宜;一、二级GPS控制网,主要应用于大型桥梁、隧道等测量控制网的建立,其实际作业中要求相邻点间的平均距离较长。
表中固定误差和比例误差的规定是既考虑到施测控制网的等级,又结合目前接收机发展的状况而确定的。
点位中误差是指GPS控制网中的点相对于联测的高等级控制点的相对点位误差。
3.2 GPS控制网设计
3.2.2 为了使GPS控制网投影长度变形值小于2.5cm/km,必要时可采用公路抵偿坐标系。公路低偿坐标系除可移动中央子午线外,亦可选择自己的参考椭球。一般情况下该椭球的中心、轴向和扁率与国家参考椭球相同,只不过其长半径有一改正量。
设某公路抵偿坐标系位于海拔高程为h的曲面上,该地的大地水准面差距为ξ,则该曲面离国家参考椭球的高度(hn)为:
hn=h+ξ (3.2.2-1)
长半径的改正量为:
da=(a/N)hn (3.2.2-2)
式中: da——椭球长半径的改正量(m)
a——国家参考椭球的长半径(m)
N——抵偿坐标系控制网原点在国家参考椭球中卯圈的曲率半径(m)则公路抵偿坐标系参考椭球的长半径aL为:
aL=a+da (3.2.2-3)
GPS定位成果是相对于WGS-84椭球而言的,地方抵偿坐标系坐标是相对于某一地方椭球而言的,因此必须将GPS定位成果投影成与国家大地测量控制网或地方独立控制网相匹配容。其要点是使GPS基线向量网与常规地面测量控制网原点重合,起始方位一致,这样使两者在方向和尺度上均具有可比性。两者在起始方向上的偏差可利用地面网原点至起始方位点的大地方位角A0和GPS控制网相
应方位上的大地方位角A求得。显然,两坐标系在起始方向上的偏差对转换精度具有直接的影响。坐标系转换关系的确定+是根据两坐标系公共点的坐标来确定的,其公式如下:
Xis Xit
Yis = Yit +CT (3.2.2-4)
Zis Zit
式中:T=[△X △Y △Z K εx εy εz]
1 0 0 Xit 0 -Zit Yi
C= 0 1 0 Yit Z 0 -Xit
0 0 1 Zit -Yit Xit 0
Xit ,Yit,Zit,;Xit,Yit,Zit—公共点在两坐标系中的坐标;
εx,εy,εz—两坐标系间的旋转参数;
K—两坐标系间的尺度比。
影响转换参数求定精度的主要因素有:
(1)地面网观测值与卫星网观测值不匹配;
(2)地面网坐标精度和卫星网的精度;
(3)公共点的分布情况等。
3.2.4 “必要时”是指东西方向的路线过长时,即使采用抵偿坐标系,仍然难以保证其投影长度变形值小于2.5cm/km,为此,可将整个路线分成多个投影带。在分带附近布设一对相互通视的GPS点,是为使采用其它测量方法进行加密和扩展时两分带在该处的坐标能统一和唯一。
3.2.5 一项公路工程中往往分布着多种大型构造物,如桥梁、互通立交、隧道等,为保持GPS控制网精度的一致性,使用构造物测量控制网与路线测量控制网协调一致,无论其等级如何,应一次设计、布设、平差。而对于特殊构造物,由于它们对测量精度要求高,故在进行GPS控制网平差时,可以先将特殊构造按首级控制网平差,然后把首级控制网点作为固定点,对次级网平差。为提高GPS控制网的精度,也可将两级网联合进行统一平差。
3.2.6 GPS控制网作为公路工程项目的首级控制网时,每隔5km应布设一对相互通视的GPS点,是为在采用其它测量方法进行加密时可布设成附合导线的形式。当GPS控制网直接作为施工控制网时,每一点至少与一个相邻点通视,是为了便于施工放样顺利进行。
3.2.7 衡量GPS控制网测量质量高低的主要指标与其它测量方法一样,同样是精度和可靠性。采用不同的布网方法,其总基线数、独立基线数、剩余独立基线数均不会相等,其同步环闭合条件、异步环闭合条件亦不相同,因而控制网的精度、可靠性等也不同。显然,闭合条件越多,其精度和可靠性越好,因此在布网时应尽可能使整个网中包含较多闭合条件。
3.2.8 评定基线处理结果质量的重要依据之一是非同步环闭合差。
为避免基线过多时误差可能相互掩盖,所以组成非同步环的基线数不宜过多;根据经验与测算,对不同等级的基线数作了具体的规定。
3.2.9 所谓网连式布网,是指相邻同步图形之间有两个以上公共点相连接的布网方法;所谓边连式布网,是指相邻同步图形之间仅有两个公共点相连的布网方法;所谓铰链导线式布网是指沿路线方向,布设成具有多个结点且同步环与同步环相套的布网方法;
所谓点连式布网,是指相邻同步图形之间仅有一个公共点连接的布网方法。显然依图形几何强度和可靠性指标由强到弱的布网方式分别为网连式、边连式、铰链导线式和点连式,据此规定了各级网的布网方式。
3.2.10 要求GPS控制网应同附近国家平面控制点联测,是将国家平面控制点坐标作为GPS控制网成果转换的起算数据,因此要求联测点应具有高的精度、一定的数量和密度。联测的点数必须是两个以上,其中一个作为GPS控制网在地面坐标系中的定位起算点,两个点间的方位和长度作为GPS控制网
在地面坐标系内的定向、长度的起算数据;为保证地面点的正确性和可靠性,至少还需一个点作为检核点,所以规定联测的国家平面控制点应不少于3个。
当测区较大时,还应适当增加联测点的数量。根据国内外的研究和实践证明,应联测3-5个精度高、分布均匀的点;为了能使各个投影带平差,在分带附近还应联测一个平面控制点。
3.2.11 GPS控制网进行高程联测的目的是使GPS控制网所测的大地高有效地转化为海拔高程。GPS 控制网所测高程是大地高,它是相对于数字表面—椭球面的高程,而我们实际使用的是正常高,是相对于大地水准面的高程。大地水准面和参考椭球面之间存在着一个差值,称之为大地水准面差距。该差距是一个变化量,随地点的不同而不同。求大地水准面差距有两种方法,一是大地水准面模型法,目前使用较多的模型有美国的Rapp Osu91A、英国的osu91A等;二是利用GPS网中的水准点,求其正常高与GPS大地高之差,然后对其它各点求出改正数。一般进行二次多项式拟合:
Dh=a0+a1x+a2y+a3xy+a4x2+a5y2 (3.2.11)
式中: Dh—GPS点正常高与大地高之差(mm);
ai(I=0,…,5)—二次多项式系数;
x,y—GPS点的纵横坐标(m)。
为了使求得的正常高准确,至少应联测6 个以上的水准点,如少于6个则只能进行线性改正。另外,水准点的分布应均匀并在测区的周边,以尽可能避免外推和保证内插的精度。
根据我国对GPS高程联测的经验,当水准点间距在20km-30km时,平原和丘陵地区高程精度可达到厘米级,山区也可达到10cm-20cm.当测区内地形复杂时,则联测点的数量和分布要求较高,这是由于需要详细的大地水准面才能有效地解决GPS大地高往海拔高程转换的问题。至于联测点的高程精度问题,只要求达到不对求定大地水准面差距产生显著影响的程度即可。另外理论和试验表明,大地高误差除使高程方向产生的变形最大外,还使平面路线方向产生较大的变形。当高程基准误差等于0.5m时,进行三维约束平差造成GPS控制网的变形已大于网的观测误差,因此,对作为基准点的高程联测点的精度也应引起足够的重视。四等水准测量可达到要求并且较易施测,因此规定应以不低于四等水准测量的方法进行联测。
4 选点与埋石
4.2.4 GPS卫星定位误差主要有三种原因:(1)GPS信号的自身误差(包括SA技术带来的人为干涉误差),简称卫星误差;(2)GPS信号的传播误差;(3)GPS信号接收机的误差。对于GPS相对定位而言;关键在于传播误差,它是由电离层和对流层的时延误差以及多路径误差所致。对于前者在观测和数据处理时采用一定的措施可有所减弱,而多路径误差则与点位的选择相关,因此选择的点位附近不应有强烈干扰卫星信号接收的物体。
点位离开高压输电线路的距离除与输电线路的电压高低有关外,还与输电线路的走向、卫星分布象限等因素有关,比较复杂,实际作业过程中应量远离高压输电线路。
4.3.2 GPS点埋设后,均需等待一段时间后方可认为“稳定”。时间长短与点的等级、点位埋设位置等情况有关,一般对冰冻地区至少要经过一个解冻期;位于软土地区至少要经过一个雨季。
4.3.4 GPS标石埋设于非耕地时应露出地面少许,是为便于寻找;当埋设于耕种地时应埋设于耕种表土层以下,是为利于标石的保存。
5 观测
5.1.1 一个完整的载波相位观测值应由整未知数NO、整周数部分Int(β) 和不足一整周的部分
Fr(β)等构成。其中不足一整周的部分可以通过相位差法准确确定,整周数部分亦可利用卫星间求差等方法对周跳进行探测及修复而得出正确的数值,因此能否正确确定整周未知数是定位精度的关键所在。
表态定位中之所以要观测较长时间,其主要目的就是为了正确确定整周未知数。
快速静态定位是利用初次平差中所提供的所有信息,如解矢量、相应的协因数阵、单位权方差等采用假设检验的方法进行基线解算。在短基线上进行快速静态定位时,采用双频接受机只需观测
1min便能成功地确定整周未知数,单频接收机观测7-8 颗卫星也能在几分钟内确定整周未知数。一般快速静态定位在已解出整周未知数的情况下观测1min-2min 就可达到厘米级的精度,但为保险起见,给予一定的精度储存,对各级GPS 控制网仍规定了较长的观测时间。当单频接收机采用快速静态定位方法施测GPS控制网时,其观测时间均应大于15min。一级GPS控制测量主要应用于跨江河、海峡等施工时对测量精度具有特殊要求的桥梁、隧道等特殊构造物的测量控制网,可靠性及精度要求较高,而快速静态定位方法对直接观测基线不构成闭合图形,因此本规范不提倡使用快速静态定位方法建立类似的测量控制网。
6 基线解算与检核
6.0.2 基线解算时,必须固定一点作为起算点。该起算点在WGS-84坐标系中的坐标精度,将会影响基线解算结果的精度。根据研究,为达到1ppm的相对定位精度,要求起始点坐标的精度达到+-2.5m;要达到10ppm的相对定位精度,则要求起始点的坐标精度为+-25m。
因此,为达到各类接收机的标称精度1cm+(1-2)ppm,基线解算时起始点坐标误差应小于20m,即起算点坐标的精度水平应值得重视。鉴于此,本规范对基线解算时WGS-84坐标系中的参考点的获取方法作了具体和规定,目的是为了使参考点能保证一定的精度。
当采用单点定位方法获取坐标值时,实践证明,要获得上述精度的坐标值,则定位时间至少要大于2h。
6.0.3 电离层折射误差、对流层折射误差是影响GPS定位精度的两个主要因素。据国外资料报道,在太阳活动激烈的年份中,利用广播星历中给出的系数进行单频电离层折射改正,残余误差对较长基线的影响可达3ppm,电离层折射中的残余误差的影响将导致无法准确确定整周未知数。特别是当基线长度较长(大于20km-30km)时,电离层折射与对流层折射的影响将越来越明显,因此规定当控制网点间距离大于20km时,应加入对流层和电离层的修正。一般情况下,GPS控制网的边长不会超过20km,但当GPS控制网与国家点联测或为加强GPS控制网的图形结构而进行图形间联测时,边长可能超过20km,此时应加入对流层和电离层修正。
电离层和对流层的修正模型,不同的GPS接收机生产厂家所采用的标准模型各不相同,因此应采用随机购进的软件进行修正。
6.0.4 就理论而言,要同一观测时间段所形成的闭合环称为同步环。但在实际观测过程中,由于种种原因,如某台仪器未准时到位、观测过程中仪器或信号出现故障等,同一组观测并未能在同一时间段进行,严格地讲应为未同步观测。可是从另一方面讲,尽管观测时并未同步,但实际上毕竟还是形成了一个闭合环;这种闭
合环是同步环还是异步环,这要看同步观测的时间比而定。本规范中所规定的40/100、80/100只是力求从量上作出具体的规定,实际作业中可视具体情况而定。
6.0.5 如何正确评定基线处理结果,是一个值得继续探讨的问题。基线处理结果的评定,本规范采用《全球定位系统(GPS)测量规范》(CH2001-92)中的方法。实际作业过程中也可根据作业条件和GPS接收机的性能按接收机的标称精度来评定基线的处理结果,
其闭合差限差为:
△限=2√n·√e2+(d·p)2 (6.0.5)
式中:△限—同步环或异步环闭合差;
n—同步环或异步环中的基线数;
d—同步环或异步环中基线的平均长度km;
e,p—GPS接收机标称精度的加、乘常数。
7 GPS控制网平差计算
7.0.2 影响伪距定位结果的一个主要原因是使用了工作状态不佳的卫星数据,因而删除工作状态不佳的卫星数据是提高为距定位精度的重要途径。如果对某一或某几个卫星在某段时间内的残差过大且有明显的系统误差,则表明这些卫星在这一时间段内的为距质量欠佳,应予删除。
7.0.3根据实践经验,起算数据在平差计算时起着至关重要的作用,但往往却是容易被忽略的问题。为了使GPS基线向量网能与地面网的成果兼容一致,必须将GPS基线向量归化到地面相应的坐标系中去。但GPS控制网的相对精度一般要比地面网的精度高,这一点可通过比较GPS控制网无约束平差结果的精度和固定地面已知点的GPS控制网约束平差结果的精度而明显看出;特别是当地面已知点
误差较大或含有粗差时,将严重影响GPS控制网约束平差的精度。
已知数据本身是肯定含有误差的,关键是误差的大小,如果已知数据对GPS控制网最后平差结果的影响在测量生产的精度要求范围之内,则认为所采用的起算数据的可靠性和精度是合理的。
7.0.4本规范规定当采用三维平差时,一般只假定一个点的大地高作为起算数据,主要是考虑到我国目前三角点高程精度较低的原因。当所联测的三角点高程精度较高,不至于影响平差结果时则应尽可能地采用。
7.0.5按误差理论,同精度两次测设同一点的互差限差为2√2倍的点位中误差,考虑到公路设计施工精度的需要,将重合点位的互差限差定为两倍的点位中误差。
GPS-RTK技术在道路横断面测量中的应用
摘要 本论文主要研究了全球定位系统GPS-RTK技术及南方CASS地形图成图软件和纬地公路设计软件联合用于公路断面测量的方内容,提出了利用上述硬件和软件结合进行内外业一体化的公路断面测量方法。 论文简要介绍了GPS系统的组成、主要工作特点以及在公路工程中的应用现状;论述了GPS-RTK的工作原理、外业测量的过程、以及在公路工程断面测量中应用的优势;论文介绍了南方CASS地形图成图软件地表模型的建立和等高线的绘制方法、纬地公路设计软件的线路设计和数模建立以及断面图绘制的方法。 论文通过庄盖高速公路2标段的断面测量实例,验证了文中提出的利用GPS-RTK及南方CASS软件和纬地软件相结合的一体化公路断面测量的方法,实践证明,该方法是可行的,达到了提高效率和自动化程度的目的,断面数据精度也得到了提高,为快速进行断面测量和地面土方计算提供了解决方案。论文还论述了GPS-RTK与常规水准仪相结合,解决现状测区高程拟合的问题。 关键词: GPS-RTK;公路断面测量;GPS控制网;南方CASS;纬地软件
Abstract This paper is a global positioning system (GPS) for the measurement of the content of highway projects, the main research will be the Global Positioning System (GPS) RTK technology for the road section survey, and with latitude in the South CASS software software and graphics within the industry to calculate Earthwork. An outline of the GPS system, the composition of the main features and the status of highway engineering; discusses the GPS-RTK cross-section measurement in the application of highway engineering advantages; from the basic principle of GPS positioning, detailed analysis of the GPS- RTK surveying outside the process: systematic study of latitude in the South CASS with software use. Papers with CASS and latitude to the south of software use, comprehensive study of the road GPS RTK operation mode of the characteristics of measurement and the application of GPS RTK technology road measurements (including road surface, profile, cross section) the entire process, and highlights South CASS combining with the latitude to the process of drawing cross-section and earthwork calculations. GPS RTK paper discusses the combination with conventional water level to solve specific engineering problems, CASS and the latitude of the South proposed to combine the concept drawing, saving time. Key words:GPS-RTK;Road section survey;GPS Control Network;South CASS;Latitude to the software
GPS静态控制测量网平差报告
FJ -3 工程测量技术交流群18874248 省道S 229南坑至源头段 二级公路改建工程 GPS 静态控制测量 网平差报告 萍 乡 公 路 勘 察 设 计 院 二○一一年九月 目 录 一、 GPS 控制点成果表…………………………………………1 二、 GPS 控制点网示意图………………………………………1 三、 GPS 控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
GPS技术在公路测量中的应用前景
GPS技术在公路测量中的应用前景
GPS技术在公路测量中的应用前景 1、GPS技术发展现状 全球定位系统GPS(GlobalPositioningSystem)是美国陆海空三军联合研制的卫星导航系统,具有全球性、全天侯、连续性、实时性导航定位和定时功能,能为各类用户提供精密的三维坐标、速度和时间。单点导航定位与相对测地定位是GPS应用的两个方面;对常规测量而言相对测地定位是主要的应用方式。 相对测地定位是利用L1和L2载波相位观测值实现高精度测量,其原理是采用载波相位测量局域差分法:在接收机之间求一次差,在接收机和卫星观测历元之间求二次差,通过两次差分计算解算出待定基线的长度;求解整周模糊度是其关键技术,根据算法模型,设计了静态、快速静态以及RTK等作业模式。静态作业模式主要用于地壳变形观测、国家大地测量、大坝变形观测等高精度测量;快速静态测量以其高效的作业效率与厘米级精度广泛应用于一般的工程测量;而RTK测量以其快速实时,厘米级精度等特点广泛应用于数据采集(如碎部测量)与工程放样中。RTK技术代表着GPS相对测地定位应用的主流。 GPS测地型接收设备是实现测地定位的基本条件,接收机有单
输入等中间环节,是公路勘测设计“内外业一体化”的要求,也是影响高等级公路设计技术发展的“瓶颈”所在。目前公路勘测中虽已采用电子全站仪等先进仪器设备,但常规测量方法受横向通视和作业条件的限制,作业强度大,且效率低,大大延长了设计周期。勘测技术的进步在于设备引进和技术改造,在目前的技术条件下引入GPS技术应当是首选。当前,用GPS静态或快速静态方法建立沿线总体控制测理,为勘测阶段测绘带状地形图,路线平面、纵面测量提供依据;在施工阶段为桥梁,隧道建立施工控制网,这仅仅是GPS在公路测量中应用的初级阶段,其实,公路测量的技术潜力蕴于RTK(实时动态定位)技术的应用之中,RTK技术在公路工程中的应用,有着非常广阔的前景。下面就RTK技术在公路勘测中的应用作简单的介绍。 3、RTK技术在公路测量中的应用 3.1 实时动态(RTK)定位技术简介 实时动态(RTK)定位技术是以载波相位观测值为根据的实时差分GPS(RTDGPS)技术,它是GPS测量技术发展的一个新突破,在公路工程中有广阔的应用前景。众所周知,无论静态定位,还是准动态定位等定位模式,由于数据处理滞后,所以无法实时解算出定位结果,而且也无法对观测数据进行检核,这就难以保证观测数据的质
GPS公路横断面测量与常规测量方法之比较
GPS公路横断面测量与常规测量方法之比较 摘要:本文通过对公路横断面测量作出基本介绍,介绍了常规测量方法与运用GPS测量方法的作业过程,由此对两种方法进行比较说明。 关键词:公路,横断面,测量,比较 Abstract: this paper introduces basic measuring a cross-section of the highway, and introduces the measurement method and using conventional GPS measurement methods of process, which of the two methods are compared. Keywords: highway, transverse section, measurement, and more 1.引言 在进行道路设计时,需要对整个路线的横断面进行测量,以获得道路中线上各个里程桩及加桩处的高程,利用观测数据绘制横断面图,其最终目的是为设计人员合理地设计道路边坡、路基以及计算土石方量提供依据[1]。 随着社会科技的发展,测绘仪器不断发生着更新换代,相应的横断面测量方法也在不断改进,本文旨在对常规的道路横断面测量方法与发展迅速的新兴的GPS测量方法进行比较说明。 2.横断面测量方法 2.1常规测量方法 进行横断面测量时,首先应确定出横断面的方向,再以中心线做依据向两边施测,常规的横断面测量方法有花杆皮尺法、水准仪配合皮尺法,经纬仪视距法等[2]。其作业方法如下: (1)根据公路的设计坐标对中桩及加桩进行测设,然后对公路路线的纵断面进行中桩放样。上述工作完成之后,利用公路路线附近原本埋设的高等级水准点,使用水准仪测出每个中桩的高程。 (2)运用经纬仪及水准尺对公路路线的横断面进行测量。由于横断面反应的是路线两侧地面的高程变化情况,为横断面设计及土石方量计算提供基础资料,测量时,在中桩点上安置经纬仪并量出相应的仪器高度,经纬仪镜头瞄准线
1.GPS静态控制测量报告
大戛高速公路项目(第四工段) 导线复测总结报告 编制: 审核: 审批: 云南建投大戛高速公路第四工段项目部 2016年8月 目录
1.工程概况 (3) 2.编制依据 (4) 3.适用范围 (4) 4.测量人员的组成及仪器设备 (4) 5.平面控制测量 (5) 6.高程控制测量 (7) 7.测量资料管理及上报 (7) 8.质量保证措施 (7) 9.总结 (8) 10.附录 (8)
1.工程概况 工程概况 大戛高速公路四工段位于云南省玉溪市新平县,工段起于三工段K33+528路基段,经红星村等村落,止于五工段K44+555莫洛黑隧道进口。主线起讫里程为K33+528~K44+555,设计路线全长。? 四工段主要工程为桥梁7座、隧道5座、路基;? 桥梁工程有: 扒拉黑箐1#桥(桥长640米) 扒拉黑箐2#桥(桥长米) 大黑箐大桥(桥长480米) 斗迭社莫大桥(桥长720米) 六十二大箐大桥(桥长374米) 红星大桥(桥长150米) 莫洛黑大桥(桥长794米) 隧道工程: 哈玛珠隧道(隧长616米) 迭社莫隧道(隧长202米) 红星1#隧道(隧长648米) 红星2#隧道(隧长1098米) 白尺达隧道(隧长1008米) 路基工程:米 复测工作内容 对大戛高速公路四工段内设计单位提供的导线控制点进行复测。
大戛高速公路四段原设计控制点表(附表) 2.编制依据 《工程测量规范》(GB 50026-2007); 《全球定位系统(GPS)测量规范》(GB/T18314-2009); 《公路勘测规范》(JTC/T C10—2007); 《公路勘测细则》(JTC/TC10-2007)。 3.适用范围 适用于大戛高速公路四工段K33+528~K44+5550里程段内的施工放样工作。 4.测量人员的组成及仪器设备 主要测量人员配备
公路全球定位系统(GPS)测量规范
1 总则 1.0.1 为规定利用全球定位系统﹙Global Positioning System, 缩写为 GPS﹚建立公路工程GPS 测量控制网的原则﹑精度和作业方法,特制定本规范。 1.0.2 本规范是依据《公路勘测规范》﹙JTJ 061),并参照《全球定位系统(GPS)测量规范》(CH 2001-92)的有关规定, 在收集﹑分析﹑研究和总结经验的基础上制定的。 1.0.3 本规范适用于新建和改建公路工程项目的各级GPS控制网的布设与测量。 1.0.4 采用全球定位系统测量技术建立公路平面控制网时,应根据《公路勘测规范》(JTJ 061)中规定的平面控制测量的等级﹑精度等确定相应的GPS控制网的等级。 1.0.5 GPS测量采用WGS-84大地坐标系。当公路工程GPS控制网根据实际情况采用1954年北京坐标系﹑1980西安坐标系或抵偿坐标系时,应进行坐标转换。各坐标系的地球椭球基本参数﹑主要几何和物理常数见附录A. 高程系统根据实际情况可采用1956年黄海高程系或1985国家高程基准. 1.0.6 GPS测量时间系统为协调世界时(UTC). 在作业过程中,附录D "GPS观测手薄" 中的开﹑关机时间可采用北京时间记录. 1.0.7 GPS接收机及附属设备均按有关规定定期检测. 1.0.8 GPS控制测量应按有关规定对全过程进行质量控制. 1.0.9 在提供GPS控制测量成果资料时,应执行保密制度中的有关规定. 2 术语 2.0.1 基线Baseline 两测量标志中心的几何连线。 2.0.2 观测时段 Observation session GPS 接收机在测站上从开始接收卫星信号进行观测到停止观测的时间长度。 2.0.3 同步观测 Simultaneous observation 两台或两台以上GPS接收机同时对一卫星进行的观测。 2.0.4 同步观测环 Simultaneous observation 三台或三台以上GPS接收机同步观测所获得的基线向量构成的闭合环。 2.0.5 独立基线 Independent baseline 由独立观测时段所确定的基线。 2.0.6 独立观测环 Independent observable loop 由独立基线向量构成的闭合环。 2.0.7 自由基线 Free baseline 不属于任何非同步图形闭合条件的基线。 2.0.8 复测基线 Duplicate measure baseline 观测两个或两个以上观测时段的基线。 2.0.9 边连式 Link method by a baseline 相邻图形之间以一条基线边相连接的布网方式。 2.0.10 无约束平差 Non-constrained adjustment 在一个控制网中,不引入外部基准,或虽引入外部基准但并不产生控制网非观测误差引起的变形和改正的平差方法。 2.0.11 公路抵偿坐标系 Compensation coordinate system for highway 在建立公路控制网时,根据需要投影到抵偿高程面上和(或)以任一子午线为中央子午线的一种直角坐标系。 2.0.12 首级控制网 First class control network
道路测量程序GPS
一、开关GPS主机 1、按电源键1秒,开机 2、按电源键3秒,关机 二、控制面板按键图解 主机控制面板有按键两个:F键(功能键)和电源键, 指示灯3个,分别为电源、卫星、状态。 按键和指示灯的功能和含义分别是: V8系统面板控制和指示说明图2 主 机控制面板按键图 工作方式: ●亮○灭 数据链: 1)、功能键操作说明: 1、双击 F (间隔>0.2S, 小于1S), 进入“工作方式”设置,有“基站”、“移动站”、“静态” 三种工作模式选择。 2、长按F大于3秒进入“数据链设置”,有“UHF”、“GSM”、“外挂”三种数据链模式选择。 3、按一次 F键, 进入“UHF电台频道”设置。有0~9、A~F共16个频道可选。 4、轻按关机按钮,语音提示当前工作模式、数据链方式和电台频道,同时电源灯指示电池 电量。 2)、指示灯操作说明: 1、电源灯(红色): “常亮”:正常电压:内电池>7.2V, 外电>11V “慢闪”:欠压: 内电池≤7.2V,外电≤11V “快闪”:指示电量:每分钟快闪 1~4 下指示电量 2、卫星灯(绿色):“慢闪”:搜星或卫星失锁 “常亮”:卫星锁定 3、状态灯(红绿双色灯): 绿灯:(信号灯) 内置UHF移动站时指示电台信号强度 外挂UHF基准站时常灭
内置GSM时指示登陆(慢闪),连接上(常亮) 静态时发生错误(快闪) 其他状态常灭 红灯:(数据灯) 数据链收发数据指示(移动站只提示接收,基站只提示发射) 静态采集指示 三、架设基准站 对中、整平基座,连接好GPS各连接线。 基准站架设点必须满足以下要求: (1)、高度角在10-15度以上开阔,无大型遮挡物; (2)、无电磁波干扰(200米内没有微波站、雷达站、手机信号站等,50米内无高压线); (3)、位置比较高,基准站到移动站之间最好无大型遮挡物,否则差分传播距离迅速缩短。 四、手簿程序操作流程 1、新建项目。打开手部电源,打开【Hi-RTK道路版】软件,在主界面上点击【项目】 →【新建】→【输入项目名】→右下角【√】,点击左上角【项目信息】→【坐标系统】 →【椭球】(源椭球为WGS-84,当地椭球根据测区要求选择北京54或国家80)→【投 影】→【投影方法】(根据测区要求情况选择)→【中央子午线】(输入正确的中央子午线),【椭球转换】【平面转换】【高程拟合】都改为无,→【保存】→【OK】→【OK】→【╳】。 2、连接基站GPS主机。在主界面上点击【GPS】→【接收机信息】→【连接GPS】→(手 簿:Q series / GIS+;连接:Q系列/ GIS+蓝牙;端口:5;波特率:19200;GPS类型:V8)【连接】→选择基站主机的机身号后点【连接】(如果没有基站的机号,选择【搜索】搜到机号后点【停止】→【连接】)。连接好后屏幕会显示【╳╳╳╳╳╳╳】(仪器机身号)。 3、设置基准站。【GPS】→【接收机信息】→【基准站设置】→输入【点名】【天线高】 →【平滑】(自动采集10次取平均值作为单点定位的基准站坐标)→【√】→【数据链】 (为:内置电台;外挂电台的为:外部数据链)→【频道】(V8 Star基站的频道在这里 设置;外挂电台的基站频道以外挂电台的频道为准)→【其他】(差分模式为RTK,电文 格式为:RTCA,高度截止角:10-15)→【确定】→【设置成功】→【╳】(电台收发灯 和基站主机信号灯开始闪烁且手簿左上角解类型为“已知点”没有任何提示就说明基 准站设置好了)→在主界面上点击【GPS】→【接收机信息】→【断开GPS】。
GPS公路测量实习报告
GPS公路测量实习报告 GPS公路测量实习报告 实习报告l 实习地点: 安康地区此次实习为毕业设计的一个组成部分,参加生产单位的具体工程项目更能锻炼自己的实际工作能力。此次随陕西公路勘察设计院一起,对阿北(阿荣旗至北海)高速公路安康到陕川界地段进GPS 公路勘测测量。四月的安康地区山清水秀,绿意盎然。一片春光如影随形。沿线江水碧玉,景色宜人,在勘测的同时也一睹祖国的大好河山。着对我来说,是意外收获。l 工程简介安康至陕川界是西部开发干线公路阿荣旗至北海线在陕西境内的一段,是我省米字型公路主骨架的重要组成部分,它的建设对于促进西部大开发战略实施,完善全国及我省公路主骨架网络,增强西北与西南地区的经济联系,促进沿线丰富的自然资源和旅游资源开发,加快沿线群众脱贫致富步伐,促进地方经济发展具有重要意义。该公路起于汉滨区五里镇尹家营村,接小河至安康高速公路的终点,经流水镇、紫阳县、高滩镇、毛坝乡至陕川交界的白扬溪,路线全长105。364公里,工程投资74。43亿元,拟利用世行贷款3。5亿美元,已列入国家利用世行贷款XX~XX 财年计划,并按世行简化项目评估周期12个月进行项目前期工作,确保XX年上半年开工建设。l 实习时间: XX-4-9--------XX-4-23l 实习内容: 公路GPS勘测测量公路野外勘测的总体目的是把研究的路线走向方案通过适当的勘测放在实地,并取得相关的设计资料,根据《公路工程基本建设项目设计文件编制办法》的规定,公路工程基本建设项
目一般采用两阶段设计,即初步设计和施工图设计(初测和定测)。 l 实习目的和任务: 1。通过实习巩固和熟练专业知识,将大学阶段所学知识融会贯通,以达到学以致用的效果。2。初测目的: 根据测量资料进行纸上定线和相关的内业工作,初步确定采用的路线方案,为编制初步设计提供所需的基础资料。3。定测目的:通过现场测量进行优化,再实地放线定桩确定人工构造物的位置,为施工图设计提供详细可靠的资料l 工程资料安康~陕川界高速公路控制测量技术设计书 一、概述安康~陕川界高速公路是国道主干线阿荣旗至北海陕西境内的一段。线路起点接小河~安康高速公路终点安康立交,沿途经过流水镇、洞河镇、紫阳县、高滩乡、毛坝镇、麻柳镇,线路终点位于四川省万县境内。测区路线全长约120公里。 二、资料收集及作业依据 (一)、资料的收集级利用: ① 解放军总参测绘局1981年出版的1/10000彩印图。 ② 陕西省绘局III等以上三角点成果(见下表)。 ③ 陕西省绘局III等以上水准点成果(见下表)。 ④ 安康~陕川界高速公路工程可行性研究报告。已知三角点、水准点成果表表 1-1 点名 X(米) Y(米) H(米)备注长枪岭3619654。20 310477。85 XXXXXX II等竹扒寨 3595805。07 264954。06 XXXXXX II等黄草梁 3572158。88 231656。64 XXXXXX II等西光35 XXXXXX XXXXXX 267。981 I等渔安10 XXXXXX XXXXXX
GPS公路测量应用施工工法
GPS公路测量应用施工工法 完成单位:中建五局土木工程有限公司 主要完成人:邓贵奇刘陶然刘锦博张红卫 关键词:公路工程测量 GPS RTK 1 前言 随着我国近几年基础事业大规模发展,国家对公路市场大力投资,要求我国公路施工单位具有高科技管理手段,高效率保质保工期完成施工任务。而对于公路施工行业,从进场交桩到竣工验收复测施工全过程,均需要测量控制。测量成果质量好坏直接影响到工程的质量、进度、成本。如何高效优质完成公路测量控制是大多数施工单位面临问题,特别是对于路线长,地形复杂,植被茂密,通视条件差,山高沟深,悬崖绝壁,条件艰险的山区测量环境,更为测量工作带来了极大困难,传统的测量方法是采用全站仪进行测量,对测量人员劳务强度大效率低,而且受天气、人为、仪器等因素干扰测量成果误差大。随着时代的发展,测量方法必将迎来新的变革,GPS即时动态定位(Real Time Kinematic,RTK)具有施测迅速,移动快速,且不需后处理的内业计算工作并提供高精度的即时定位效能,采用RTK测量可以降低测量人员劳务强度,提高测量成果质量。故RTK在公路测量的早日普及,对于提高公路测量水平提高具有极其深远作用。 2 工法特点 2.1 作业效率高。在一般的地形地势下,大大减少了传统测量所需的控制点数量和测量仪器的“搬站”次数,仅需一人操作,在一般的电磁波环境下几秒钟即得一点坐标,作业速度快,劳动强度低,节省了外业费用,提高了劳动效率。 2.2 定位精度高,数据安全可靠,没有误差积累。只要满足RTK的基本工作条件(有效卫星5颗以上,卫星高度角20度以上,PDOP值<5),RTK的平面精度和高程精度都能达到厘米级。 2.3 降低了作业条件要求。RTK技术不要求两点间满足光学通视,只要求满足“电磁波通视”,因此,和传统测量相比,RTK技术受通视条件、能见度、气候、季节等因素的影响和限制较小,在传统测量看来由于地形复杂、地物障碍而造成的难通视地区,只要满足RTK的基本工作条件,它也能轻松地进行快速的高精度定位作业。 2.4 RTK作业自动化、集成化程度高,测绘功能强大。RTK可胜任各种测绘内、外业。流动站利用内装式软件控制系统,无需人工干预便可自动实现多种测绘功能,使辅助测量工作极大减少,减少人为误差,保证了作业精度。 2.5 操作简便,容易使用,数据处理能力强。只要在设站时进行简单的设臵,就可以边走边获得测量结果坐标或进行坐标放样。数据输入、存储、处理、转换
GPS在公路控制测量中的应用开题报告
GPS在公路控制测量中的应用开题报告辽宁工程技术大学 本科毕业设计(论文)开题报告 题目 GPS在公路控制测量中的应用 指导教师院(系、部) 测绘与地理科学学院 专业班级学号姓名日期 一、选题的目的、意义和研究现状 (一)选题的目的及意义 在当今测绘作业过程中,大量交通基础建设的投入以及工程项目技术难度的增加,对测量工作提出了新的要求,即是测绘速度快,经济投入少,精度要求高。而GPS(全球卫星定位系统)是随着现代科学的发展,不断完善的一种先进导航,定位技术。以其独有的, [3]传统测量不可取代的优点,与时俱进的满足了当今工程建设的新要求。 一直以来,在测绘工作中,既要保持良好的通视条件,又要保证测量控制网的良好结构,这一直是经典测量技术在实践方面的问题之一,而GPS观测不需要测站之间的相互通视,不需要建造舰标,这样大量减少了测量的工作和时间并且是点位的选择更加灵活;另 -6外定位精度高,大量实验表明通常在50km的基线上,其相对定位精度可达到1×10~2×-6-6-710,而在100—500km的基线上可达到10~10。观测时间短并能提供三维坐标,在测定 [6]观测站的平面位置的同时可以精确的测出测站的大底高程。并且GPS测量不受天气影响,具有全天候测量的能力。
公路控制测量是路线勘测设计的基础,随着高等级道路的兴建,对路线勘测提出了更高的要求。由于线路长且己知点少,因此,用常规手段不仅布网困难而且难以满足高精度的要求,而GPS技术的特点正好可以满足这一要求。上个世纪90年代中期,许多公路工程部门开始GPS定位技术在公路控制测量中的应用和研究。目前国内己逐步采用GPS技术 [4][4][4]建立线路首级高精度控制网,如在沪宁高速公路,青银高速公路,广惠高速公路等公路控制测量中得到广泛应用。 本文通过对GPS在公路控制测量中的应用研究,具体分析公路测量中的长度变形以及GPS控制测量的技术设计等问题。 (二)研究现状 高精度GPS定位技术在各种控制测量中得到广泛应用。从1982年第一代测量型无码GPS接收机Macrometery一100投入市场以来,在应用基础的研究、应用领域的开拓、硬 [5]件和软件的开发等方面,都得到了蓬勃的发展。广泛的试验活动为GPS精密定位技术在测量工作总的应用展现了广阔的前景。目前,GPS定位技术己高度自动化,所达到的定位精度,使测量工作的模式、理念产生了革命性的变化。相对经典的测量技术来说,GPS定位技术主要有以下特点:观测站之间无需通视;定位精度高;观测时间短;提供三维坐标。我国自80年代末石油部、总参测绘局、国家测绘局等陆续进口了GPS接收机并展 开了各方面的研究工作。进入90年代后,随着卫星的增多,GPS接收机的价格下降等原 [6]。因,我国的一些公路勘测设计单位购置了GPS接收机并应用于实际工作中
gps动态测量实习报告
gps动态测量实习报告 gps测量实习报告 一、实习目的 二、实习地点 三、实习设备 四、实习内容 五、gps控制网的技术设计 1.布网范围 2.布网方案及网形设计 3.精度标准 4.坐标系统与起算数据 六、gps测量的外业实施 七、gps测量数据处理 八、实习总结 1、问题讨论:对实习中的现象、产生的误差等进行讨论和分析,尽可能地结合相关理论,以提高自己的分析问题、解决问题的能力,也为以后的科学研究打下一定的基础。 2、注意事项:对本次实习进行总结得出应注意的问题。 3、收获体会:,经过本次实验个人的收获体会。 gps rtk测量实验报告 一、实验目的 二、实验地点 三、实验设备 四、实验内容 五、实验原理 六、实验过程 1、外业观测过程 2、内业处理过程 七、实验成果 八、实验总结 1、问题讨论:对实验中的现象、产生的误差等进行讨论和分析,尽可能地结合相关理论,以提高自己的分析问题、解决问题的能力,也为以后的科学研究打下一定的基础。
2、注意事项:对本次实验进行总结得出应注意的问题。 3、收获体会:,经过本次实验个人的收获体会。第三篇:gps公路测量实 习报告 实习报告l 实习地点:安康地区此次实习为毕业设计的一个组成部分,参加生产单位的具体工程项目更能锻炼自己的实际工作能力。此次随陕西公路勘察设计院一起,对阿北高速公路安康到陕川界地段进gps公路勘测测量。四月的安康地区山清水秀,绿意盎然。一片春光如影随形。沿线江水碧玉,景色宜人,在勘测的同时也一睹祖国的大好河山。着对我来说,是意外收获。l 工程简介安康至陕川界是西部开发干线公路阿荣旗至北海线在陕西境内的一段,是我省“米”字型公路主骨架的重要组成部分,它的建设对于促进西部大开发战略实施,完善全国及我省公路主骨架网络,增强西北与西南地区的经济联系,促进沿线丰富的自然资源和旅游资源开发,加快沿线群众脱贫致富步伐,促进地方经济发展具有重要意义。该公路起于汉滨区五里镇尹家营村,接小河至安康高速公路的终点,经流水镇、紫阳县、高滩镇、毛坝乡至陕川交界的白扬溪,路线全长105.364 公里,工程投资74.43亿元,拟利用世行贷款3.5亿美元,已列入国家利用世行贷款xx~xx财年计划,并按世行简化项目评估周期12个月进行项目前期工作,确保xx年上半年开工建设。l 实习时间:xx-4-9--------xx-4-23l 实习内容:公路gps勘测测量公路野外勘测的总体目的是把研究的路线走向方案通过适当 的勘测放在实地,并取得相关的设计资料,根据《公路工程基本建设项目设计文件编制办法》的规定,公路工程基本建设项目一般采用两阶段设计,即初步设计和施工图设计。 l 实习目的和任务:1. 通过实习巩固和熟练专业知识,将大学阶段所学知识融会贯通,以达到学以致用的效果。2. 初测目的:根据测量资料进行纸上定线和相关的内业工作,初步确定采用的路线方案,为编制初步设计提供所需的基础资料。3. 定测目的:通过现场测量进行优化,再实地放线定桩确定人工构造物的位置,为施工图设计提供详细可靠的资料l 工程资料安康~陕 川界高速公路控制测量技术设计书一、概述安康~陕川界高速公路是国道主干线阿荣旗至北海陕西境内的一段。线路起点接小河~安康高速公路终点安康立交,沿途经过流水镇、洞河镇、紫阳县、高滩乡、毛坝镇、麻柳镇,线路终点位于四川省万县境内。测区路线全长约120公里。二、资料收集及作业依据、资料的收集级利用:① 解放军总参测绘局1981年出版的1/10000彩印图。② 陕西省绘局iii等以上三角点成果。③ 陕西省绘局iii等以上水准点成果。④ 安康~陕川界高速公路工程可行性研究报告。已知三角点、水准点成果表表 1-1点名xyh 备注长枪岭3619654.20140477.85******ii等竹扒寨 3595805.07264954.06******ii等黄草梁3572158.88231656.64******ii等西光
gps道路测量实习心得
gps道路测量实习心得 对于架仪器及测量的速度可以说是一次飞跃,在我们面临各种问题的同时我们也学会了解决问题的方法工程测量实习报告4篇汇集。对于以后踏入社会有了一个很好的的接轨。 gps道路测量实习心得过去的两个星期中,在老师的带领下我们开始了对“工程测量”这门课程的实习。工程测量这门课,是需要理论与实际结合的。实习是大学生活的第二课堂,是检验真理的试金石。在课堂上,书本中抽象的叙述说明往往使我们一下难以很好掌握,但当我们面对着实物实际的操作后,我们将能非常迅速、牢固的掌握相关的知识点。更重要的,实习能使我们在能更加熟练、精准的操作基础上,更贴近实际运用的作业,及独立的完成所需的测量实际任务,这样也是大学生锻炼成长的有效途径。所以,深知实习重要性的我必须认真的把握好这难得的学习机会。 现在回头看来,两周的实习酸、甜、苦、辣俱全。我们的第一项任务是选择控制点。在实习的第一天,由于对计算方法的不熟悉,我们的计算结果一直误差甚大,只能通过不断对照书本,与其他组的组员共同探讨查找问题,慢慢更正。由于计算公式比较复杂,加上反复的计算,使得大家头痛手酸。有些组员脸上也显出沮丧的情绪……直到第二天,当我
们的数据结果终于与放样后的实际结果相符,我们才感觉到苦尽甜来。另外,我们的第二项任务是四等水准测量。当我们辛辛苦苦花了一天时间好不容易测完了学校一圈的数据,收工休息时,却被负责计算的组员告知闭合差不合要求,那就意味着我们一天的努力化作乌有……每天的每天,我们都必须在酷暑或雨水的陪伴下,扛着仪器携带着相关计算物品,在学校内外紧张忙碌,连午休时间都舍弃。我们的精神和精力都消耗了不少。 从这两周实习的日子中,我从中得到很多更宝贵的东西:首先,通过实习,让我发现我在平时学习中存在的很多知识漏洞。课本上介绍仪器使用的知识都比较抽象,到了真正实践中的时候,我们未能很好把书本知识应用到实践中,还需要老师再次进行指导。在近距离的接触这些实物,能我更牢固的掌握相关的知识点;也能令我提高对仪器的操作的熟练、精准程度(比如能够迅速对中整平)。 其次,通过这次实习,有利于培养我做事严谨、认真、不畏艰难困苦的作风。不论是对中整平时的重复精确瞄准还是在放样计算时反复检验计算数据(以确保放样时的原数据正确),每个步骤都尽量做到脚踏实地、一丝不苟,使误差尽可能的减小,及时发现错误及时检查;不论外界的环境的恶劣,克服一下就算不了什么;正确面对困难,学会静下来耐心的思考分析问题,能够独立借助书本找出解决途径。做
农村公路测量技术流程步骤
GPS与农村公路测量 gps测量技术的工作原理 相对测地定位是利用l1和l2载波相位观测值实现高精度测量,其原理是采用载波相位测量局域差分法:在接收机之间求一次差,在接收机和卫星观测历元之间求二次差,通过两次差分计算解算出待定基线的长度;求解整周模糊度是其关键技术,根据算法模型,设计了静态、快速静态以及rtk等作业模式。而rtk 技术代表着gps相对测地定位应用的主流。 gps测量的特点 gps系统是目前在导航定位领域应用最为广泛的系统,其可为各类用户连续提供动态目标的三维位置、三维速度及时间信息。gps测量主要特点如下: ①功能多、用途广 gps系统不仅可以用于测量、导航,还可用于测速、测时。测速的精度可达 0.1 m/s,测时的速度可达几十毫微秒,其应用领域不断扩大。 ②定位精度高 一般双频gps接收机基线解精度为5 mm + 1 ppm,而红外仪标称精度为5 mm+5 ppm,gps测量精度与红外仪相当,但随距离的增长,gps测量优越性愈加突出。大量试验证明,在小于50 km的基线上,其相对定位精度可达12×10-6,而在100 km~500 km的基线上可达10-6~10-7。 ③实时定位 利用全球定位系统进行导航,即可实时确定运动目标的三维位置和速度,可实时保障运动载体沿预定航线运行,亦可选择最佳路线。特别是对军事上动态目标的导航,具有十分重要的意义。
④观测时间短 采用gps布设控制网时每个测站上的观测时间一般在30 min~40 min左右,采用快速静态定位方法,观测时间更短。例如,使用timble4800 gps接收机的rtk 法可在5 s以内求得测点坐标。 ⑤测站之间无需通视 这是gps技术区别于常规测量的最大优点。常规测量技术需要保持良好的通视条件,又要保障测量控制网的良好图形结构。其这一优点,使得在布设长大线路施工控制网时,可省去大量的传算点、过渡点的测量,大大减少测量作业时间和费用,同时也使选点布网变得非常灵活。 ⑥操作简便 gps测量的自动化程度很高。目前,gps接收机已趋小型化和自动化,在观测中测量员只需打开gps接收机、量取天线高、采集环境的气象数据、监视仪器的工作状态,而其他工作,如卫星的捕获、跟踪观测和记录等均由仪器自动完成,然后利用数据处理软件对数据进行处理,即求得测点三维坐标。观测结束时,仅需关闭电源,收好接机,便完成野外数据采集任务。 ⑦可提供全球统一的三维地心坐标 经典大地测量将平面和高程采用不同方法分别施测。在gps测量中,在精确测定观测站平面位置的同时,可以精确测量观测站的大地高程。其这一特点,不仅为研究大地水准面的形状和确定地面点的高程开辟了新途径,同时也为其在航空物探、航空摄影测量及精密导航中的应用,提供了重要的高程数据。 ⑧全天候作业 gps卫星较多,且分布均匀,保证了全球地面被连续覆盖,使得在地球上任何