G73的指令格式
G73的指令格式
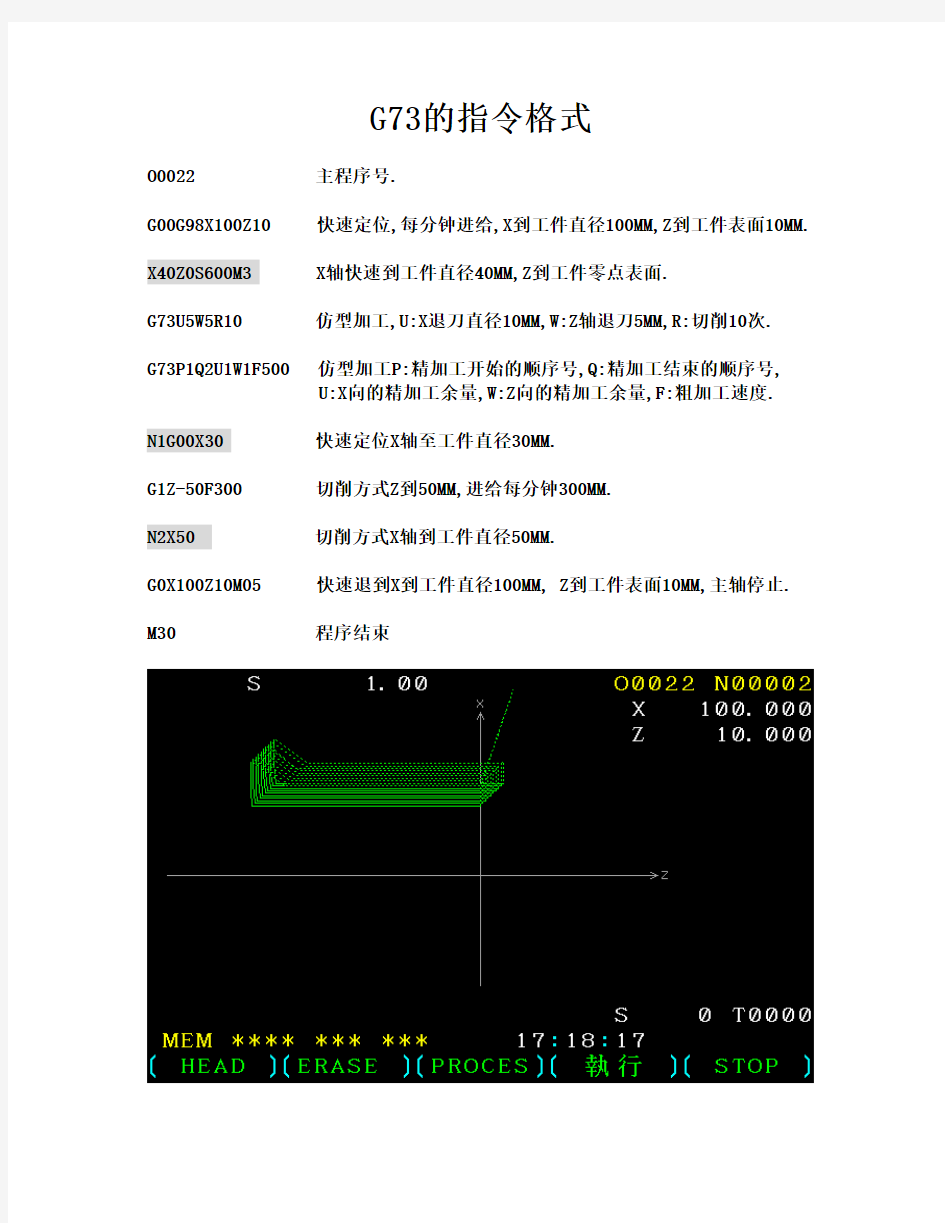
O0022 主程序号.
G00G98X100Z10 快速定位,每分钟进给,X到工件直径100MM,Z到工件表面10MM. X40Z0S600M3 X轴快速到工件直径40MM,Z到工件零点表面.
G73U5W5R10 仿型加工,U:X退刀直径10MM,W:Z轴退刀5MM,R:切削10次.
G73P1Q2U1W1F500 仿型加工P:精加工开始的顺序号,Q:精加工结束的顺序号,
U:X向的精加工余量,W:Z向的精加工余量,F:粗加工速度.
N1G00X30 快速定位X轴至工件直径30MM.
G1Z-50F300 切削方式Z到50MM,进给每分钟300MM.
N2X50 切削方式X轴到工件直径50MM.
G0X100Z10M05 快速退到X到工件直径100MM, Z到工件表面10MM,主轴停止. M30 程序结束
Linux常用命令训练习题1
Linux常用命令训练 一、文件操作命令 1.查看当前目录下的包含隐藏文件在内的所有文件,但不包括备份文件。 ls -a 2.按修改时间查看当前目录下的后缀为“.c”的文件,采用长格式显示。 ls -t -l *.c 3.用file命令查看当前目录下所有文件 file * 4.用file命令查看当前目录下所有以“.c”为后缀的文件信息 file *.c 二、文件拷贝命令 1.将/usr/games目录下的所有内容拷贝到/vivi/bbb目录下 cp -r /usr/games /vivi/bbb 2.将用户目录下的文件“a.c”拷贝到该目录的子目录“program”下。
cp a.c program 三、文件移动命令 1.将用户目录下的文件“1.c”移动到该目录的子目录“aaa”下,并覆盖该目录下的 2.c文件。 mv -i 1.c aaa/2.c 四、文件链接命令 1.在目录“~/program”下建立“~/a.c”的符号链接文件“b.c” ln - s ~/a.c ~/program/b.c 五、文件删除命令 1.强制删除目录“~/program”下的所有后缀为”.c”的文件 rm -f ~/program /*.c 六、修改文件属性 1.修改文件“~/program/a.sh”权限为文件所有者可读、可写、可执行,其他所有者 可读、可执行,但不可写 chmod 705 ~/program/a.sh
2.修改文件用户目录下,aaa/目录里的2.c文件修改时间为2011年1月1日20点 30分。 touch -m “20:30:00 2011-1-1” aaa/2.c 七、文件搜索名 1.编辑一段文字,显示文件中包含“linux”的行,并打印输出 grep -n linux aa 2.在用户目录下新建三个文件,分别为ab1.c 、ab2.c、 ab 3.c,分别设置修改时间 为5天前的某天,然后查看用户目录中包含ab字符串的5天前修改过的文件,并将他们删除,删除钱需要得到用户的确认,但是删除过程中不需要任何提示。 touch ab1.c ab2.c ab3.c touch -r “11:11:11 2013-2-3” ab1.c touch -r “11:11:11 2013-2-3” ab2.c touch -r “11:11:11 2013-2-3” ab2.c 八、创建目录 1.创建一个权限为所有者有读、写、执行权限,其他用户均为可读权限的目录,名为 ddd mkdir -m 705 ddd
机器人编程常用的四大语言介绍
机器人编程常用的四大语言介绍 伴随着机器人的发展,机器人语言也得到了发展和完善,机器人语言已经成为机器人技术的一个重要组成部分。机器人的功能除了依靠机器人的硬件支撑以外,相当一部分是靠机器人语言来完成的。早期的机器人由于功能单一,动作简单,可采用固定程序或者示教方式来控制机器人的运动。随着机器人作业动作的多样化和作业环境的复杂化,依靠固定的程序或示教方式已经满足不了要求,必须依靠能适应作业和环境随时变化的机器人语言编程来完成机器人工作。下面就来了解一下常见的机器人编程语言吧! VAL语言 一、VAL语言及特点 VAL语言是美国Unimation公司于1979年推出的一种机器人编程语言,主要配置在PUMA和UNIMATION等型机器人上,是一种专用的动作类描述语言。VAL语言是在BASIC语言的基础上发展起来的,所以与BASIC语言的结构很相似。在VAL的基础上Unimation公司推出了VALⅡ语言。 VAL语言可应用于上下两级计算机控制的机器人系统。上位机为LSI-11/23,编程在上位机中进行,上位机进行系统的管理;下位机为6503微处理器,主要控制各关节的实时运动。编程时可以VAL语言和6503汇编语言混合编程。
VAL语言命令简单、清晰易懂,描述机器人作业动作及与上位机的通信均较方便,实时功能强;可以在在线和离线两种状态下编程,适用于多种计算机控制的机器人;能够迅速地计算出不同坐标系下复杂运动的连续轨迹,能连续生成机器人的控制信号,可以与操作者交互地在线修改程序和生成程序;VAL语言包含有一些子程序库,通过调用各种不同的子程序可很快组合成复杂操作控制;能与外部存储器进行快速数据传输以保存程序和数据。 VAL语言系统包括文本编辑、系统命令和编程语言三个部分。 在文本编辑状态下可以通过键盘输入文本程序,也可通过示教盒在示教方式下输入程序。在输入过程中可修改、编辑、生成程序,最后保存到存储器中。在此状态下也可以调用已存在的程序。 系统命令包括位置定义、程序和数据列表、程序和数据存储、系统状态设置和控制、系统开关控制、系统诊断和修改。 编程语言把一条条程序语句转换执行。 二、VAL语言的指令 VAL语言包括监控指令和程序指令两种。其中监控指令有六类,分别为位置及姿态定义指令、程序编辑指令、列表指令、存储指令、控制程序执行指令和系统状态控制指令。各类指令的具体形式及功能如下:
计算机应用基础知识概述
第1章计算机应用基础知识概述 第2讲计算机应用基础知识概述(二) 教学目标及基本要求: 1、掌握计算机软件系统的构成,软件的概念、特点及分类 2、了解指令、语言、程序的概念。 3、掌握计算机的基本工作原理。 教学重点: 软件的概念、特点,存储程序原理。 教学难点: 存储程序原理。 教学内容: 1、系统软件、应用软件 2、程序设计语言、计算机的指令、计算机的程序 3、计算机的工作原理、计算机的基本工作过程 教学时间: 1学时 主要内容: 1.3.3 计算机软件系统的构成 软件:在硬件设备上运行的各种程序以及有关资料,主要由程序和文档两部分组成。1.系统软件 指管理、监控和维护计算机资源(包括硬件和软件)的软件。它是为整个计算机系统所配置的、不依赖于特定应用领域的通用性软件。它扩大了计算机的功能,提高了计算机的工作效率。系统软件是不可少,一般由生产厂家或专门的软件开发公司研发,其他程序都在它的支持下编写和运行。系统软件主要包括操作系统和实用系统软件。 (1)操作系统 概念:操作系统(Operating System,OS)是直接运行在裸机上的最基本的系统软件,是系统软件的核心,其他软件必须在操作系统的支持下才能运行。它控制和管理计算机系统内各种软、硬件资源,合理有效地组织计算机系统的工作。 DOS、Unix、Windows(95、98,2000、xp等) (2)实用系统软件 ①语言处理程序 概念:将非机器语言的程序通过解释或翻译成与其相对应的机器指令后,使其被计算机执行。 要点: ●计算机只能直接识别和执行机器语言程序。非机器语言的程序必须通过解释或翻译 成与其相对应的机器指令后,才能被计算机执行 ●一般将用高级语言或汇编语言编写的程序称为源程序,而将已翻译成机器语言的程 序称为目标程序,不同高级语言编写的程序必须通过相应的语言处理程序进行翻 译。 ●计算机将源程序翻译成机器指令时,通常有两种翻译方式:编译方式和解释方式, 具体如图1-7所示。
PLC基本指令练习题
《PLC》第一章章节练习 一、填空题 1. PLC是_ ______ 的简称,它采用存贮器,用 来在其内部存贮执行、、定时、计数和算术运算等操作的指令,并通过和输入和输出,控制各种类型的机械或生产过程。 2. PLC具有____ ___、、和 ___ ____ 的特点。 3.PLC程序既有生产厂家的,又有用户自己开发 的,提供运行平台,同时,还为PLC 程序可靠运行及信息与信息转换进行必要的公共处理。由用户按控制要求设计。 4. PLC中的是PLC的核心,起神经中枢的作用,每台PLC至少有 一个。 5.PLC的对外功能,主要是通过与外界联系的。 6. 有些PLC中的电源,以其输入类型有:和, 常用的DC为、和V。 7.PLC的存储设备:、和。 一般情况下,用户程序存储在上,系统运行中产生的中间数据存储在上。 8.三菱PLC采用最常用的两种编程语言,一是,二 是。 9.PLC的输入端子是从外部开关接受信号的窗口,PLC 内部与输入端子连接的是用光电隔离的电子继电器,它们的编号与接线端子编号一致(按进制输入)。内部有和两种触点供编程时随时使用,且使用次数不限。它们一般位于机器的端。 10. PLC的输出端子是向外部负载输出信号的窗口。的线圈由程序控制,输出继电器的外部输出主触点接到PLC的输出端子上供外部负载使用。 二、选择题: 1.PLC是在什么控制系统基础上发展起来的 A. 继电控制系统 B.单片机 C.工业电脑D。机器人 2..工业中控制电压一般是多少伏 A.24V B。36V C。110V D。220V 3.工业中控制电压一般是直流还是交流 A.交流B,直流C。混合式D。交变电压 4.请写出电磁兼容性英文缩写. A.MAC B.EMC C.CME D.AMC 5.世界上第一台PLC是哪一年发明的? A.1968 B.1969 C.1970 D.1974 6.热继电器在电路中做电动机的什么保护 A.短路B.过载C.过流D.过压 7.PLC的输出方式为晶体管型时,它适用于哪种负载。 A、感性 B、交流 C、直流 D、交直流 8.二进制数1011101等于十进制数的()。 A、92 B、93 C、94 D、95 9.一般而言,FX系列PLC的AC输入电源电压范围是多少? A.DC24V B.86-264V AC C.220-380V AC D.24V AC-220V AC 10.PLC的供电电源是多少? A.DC24V B.86-264V AC 单相 C.220-380V AC 单相D.24V AC-220V AC 三相
PLC基本指令训练实验报告要求
实验二 PLC 基本指令训练实验 一、实验目的 1.掌握编程器的键盘操作 2.学会程序的输入和指令的增删 3.加深对常用指令的理解 二、实验设备(记录下仪器、设备的规格、型号及数量) 三、实验内容(包括梯形图、指令表、数据、时序图)实验中作好纪录 (一) PRO15编程器基本操作 1.开机: 将编程开关,拨至右端 2.清零: (1)屏幕清零 (2)内存清零 当完成步骤(1)后,继续下面操作 3.键入程序练习: 椐实验教材内容进行,每键入一条指令后,按 键即进入内存。 指令上下滚动显示 4.修改程序: (1)如改本行程序,只需写入正确程序后按即可。 (2 )删除本行指令时,按 即可。 (3 )插入程序,① 回到初始程序行(即屏幕清零) ② 键入待插入的地址码,写入新指令。 5.运行程序: 将编程开关,拨至左端 (二) 基本指令训练(写出指令表,记录数据或时序图) 1.逻辑指令实验 0500 0007 END 00070500ON OFF 0501 0007 END 00070501ON OFF
0500 0002 END 00020500ON OFF 0000ON ON ON ON OFF OFF OFF OFF 000105000001 0500 0000END 0500 0000 END 0001000000010500 ON ON ON ON OFF OFF OFF OFF 0002 0500 0000END 00030001 2.定时、计数指令实验 输入如下程序,观察运行结果,监视各计时器或计数器的内容及状态。 TIM 0000END TIM00 00000500 00 #0040000010s 2s TIM000500 0002 END 00020003 0501CNT010501 0003CNT01 CNT 01 #0003 0000END 00000002 0500CNT010500 0002CNT01 CNT 01 #00391902100s 四、实验总结(实验中出现的问题及解决方法) 注: 1. 预习要求(实验课前按指定的梯型图列出指令表) 2. 由统一的实验报告纸完成。 3. 写清班级、姓名、日期、同组人名。
机器语言
机器语言 百科名片 机器语言是直接用二进制代码指令表达的计算机语言,指令是用0和1组成的一串代码,它们有一定的位数,并分成若干段,各段的编码表示不同的含义,例如某台计算机字长为16位,即有16个二进制数组成一条指令或其它信息。16个0和1可组成各种排列组合,通过线路变成电信号,让计算机执行各种不同的操作。 目录 简介 指令格式 寻址方式 种类 特点 发展过程 编辑本段简介 一条指令就是机器语言的一个语句,它是一组有意义的二进制代码,指令的基 本格式如:操作码字段地址码字段其中操作码指明了指令的操作性质及功能,地址码则给出了操作数或操作数的地址。 各计算机公司设计生产的计算机,其指令的数量与功能、指令格式、寻址方式、数据格式都有差别,即使是一些常用的基本指令,如算术逻辑运算指令、转移指令等也是各不相同的。因此,尽管各种型号计算机的高级语言基本相同,但将高级语言程序(例如Fortran语言程序)编译成机器语言后,其差别也是很大的。因此将用机器语言表示的程序移植到其他机器上去几乎是不可能的。从计算机的发展过程已经看到,由于构成计算机的基本硬件发展迅速,计算机的更新换代是很快的,这就存在软件如何跟上的问题。大家知道,一台新机器推出交付使用时,仅有少量系统软件(如
操作系统等)可提交用户,大量软件是不断充实的,尤其是应用程序,有相当一部分是用户在使用机器时不断产生的,这就是所谓第三方提供的软件。 为了缓解新机器的推出与原有应用程序的继续使用之间的矛盾,1964年在设计IBM360计算机时所采用的系列机思想较好地解决了这一问题。从此以后,各个计算机公司生产的同一系列的计算机尽管其硬件实现方法可以不同,但指令系统、数据格式、I/O系统等保持相同,因而软件完全兼容(在此基础上,产生了兼容机)。当研制该系列计算机的新型号或高档产品时,尽管指令系统可以有较大的扩充,但仍保留了原来的全部指令,保持软件向上兼容的特点,即低档机或旧机型上的软件不加修改即可在比它高档的新机器上运行,以保护用户在软件上的投资。 CISC(复杂指令系统)和RISC(精简指令系统) 编辑本段指令格式 计算机的指令格式与机器的字长、存储器的容量及指令的功能都有很大的关系。从便于程序设计、增加基本操作并行性、提高指令功能的角度来看,指令中应包含多种信息。但在有些指 令中,由于部分信息可能无用,这将浪费指令所占的存储空间,并增加了访存次数,也许反而会影响速度。因此,如何合理、科学地设计指令格式,使指令既能给出足够的信息,又使其长度尽可能地与机器的字长相匹配,以节省存储空间,缩短取指时间,提高机器的性能,这是指令格式设计中的一个重要问题。 计算机是通过执行指令来处理各种数据的。为了指出数据的来源、操作结果的去向及所执行的操作,一条指令必须包含下列信息: (1)操作码。它具体说明了操作的性质及功能。一台计算机可能有几十条至几百条指令,每一条指令都有一个相应的操作码,计算机通过识别该操作码来完成不同的操作。 (2)操作数的地址。CPU通过该地址就可以取得所需的操作数。 (3)操作结果的存储地址。把对操作数的处理所产生的结果保存在该地址中,以便再次使用。 (4)下条指令的地址。执行程序时,大多数指令按顺序依次从主存中取出执行,只有在遇到转移指令时,程序的执行顺序才会改变。为了压缩指令的长度,可以用一个程序计数器(ProgramCounter,PC)存放指令地址。每执行一条指令,PC的指
linux基本命令练习
Linux基本命令练习一 实验内容: 1.使用超级用户登录,新建组new-section,指定组ID为800。 [root@localhost root]# groupadd -g 800 new-section 2、新建用户john,所属组为new-section,密码为john。 [root@localhost root]# useradd john [root@localhost root]# passwd john New passwd:john [root@localhost root]#useradd –g new-section john 3、查看内存的使用情况,并将查看结果保存到用户主目录的https://www.360docs.net/doc/5011237243.html, 文件。 [root@localhost root]# cat /proc/meminfo [root@localhost root]# cp /proc/meminfo /root/https://www.360docs.net/doc/5011237243.html, 4、普通用户helen登录,在其主目录下新建newfile文件,并查看文件属
性。 [root@localhost root]# useradd helen [root@localhost root]# su helen [root@localhost root]$ touch newfile [root@localhost root]$ ls –l 5、设置newfile文件的权限为所有用户可读写。 [root@localhost root]# chmod 666 newfile 6、使用普通用户helen登录,在其主目录下新建newdir目录,并设置权限为755。 [root@localhost root]# useradd helen [root@localhost root]# su --login helen [root@localhost root]$ mkdir –m 755 newdir /root 7、查看helen用户主目录下的所有文件(包含隐藏文件)的详细信息,并将查看结果保存于newdir目录中,文件名为allfiles。 [root@localhost root]# useradd helen [root@localhost root]# su --login helen [root@localhost helen]$ls –a >newdir/alllfiles 8、用root用户登录,创建testdir子目录,并将此目录所属的组设置为helen。 [root@localhost root]# mkdir testdir [root@localhost root]# chown .helen /testdir
汇编指令与机器码
一、状态寄存器 PSW(Program Flag)程序状态字寄存器,是一个16位寄存器,由条件码标志(flag)和控制标志构成,如下所示: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 OF DF IF TF SF ZF AF PF CF 条件码: ①OF(Overflow Flag)溢出标志。溢出时为1,否则置0。 ②SF(Sign Flag)符号标志。结果为负时置1,否则置0. ③ZF(Zero Flag)零标志,运算结果为0时ZF位置1,否则置0. ④CF(Carry Flag)进位标志,进位时置1,否则置0. ⑤AF(Auxiliary carry Flag)辅助进位标志,记录运算时第3位(半个字节)产生的进位置。有进位时1,否则置0. ⑥PF(Parity Flag)奇偶标志。结果操作数中1的个数为偶数时置1,否则置0. 控制标志位: ⑦DF(Direction Flag)方向标志,在串处理指令中控制信息的方向。 ⑧IF(Interrupt Flag)中断标志。 ⑨TF(Trap Flag)陷井标志。 二、直接标志转移(8位寻址) 指令格式机器码测试条件如...则转移 JC 72 C=1 有进位 JNC 73 C=0 无进位 JZ/JE 74 Z=1 零/等于 JNZ/JNE 75 Z=0 不为零/不等于 JS 78 S=1 负号 JNS 79 S=0 正号 JO 70 O=1 有溢出 JNO 71 O=0 无溢出 JP/JPE 7A P=1 奇偶位为偶 JNP/IPO 7B P=0 奇偶位为奇 三、间接标志转移(8位寻址) 指令格式机器码测试格式如...则转移 JA/JNBE(比较无符号数) 77 C或Z=0 > 高于/不低于或等于 JAE/JNB(比较无符号数) 73 C=0 >=高于或等于/不低于 JB/JNAE(比较无符号数) 72 C=1 < 低于/不高于或等于
PLC训练题(基本逻辑指令简单应用1)
例1:三相交流异步电动机点动运行控制 有一台三相交流异步电动机M,其运行由交流接触器KM控制。 当按下按钮SB1时,接触器KM线圈通电,其主触点闭合,电动机M转动;当松开按钮SB1时,接触器KM线圈失电,其主触点断开,电动机M停止转动。 为了保护电动机M,控制电路中设立了热保护继电器FR。当电动机M过载时,热保护继电器FR动作,接触器KM线圈失电,其主触点断开,电动机M停止转动。 例2:三相交流异步电动机启动、停止控制 有一台三相交流异步电动机M,其运行由交流接触器KM控制。 当按下启动按钮SB2时,接触器KM线圈通电,其主触点闭合,电动机M转动;当按下停止按钮SB1时,接触器KM线圈失电,其主触点断开,电动机M停止转动。 为了保护电动机M,控制电路中设立了热保护继电器FR。当电动机M过载时,热保护继电器FR动作,接触器KM线圈失电,其主触点断开,电动机M停止转动。 例3:三相交流异步电动机点动及连续运行控制 有一台三相交流异步电动机M,其运行由交流接触器KM控制。
当按下点动按钮SB1时,接触器KM线圈通电,其主触点闭合,电动机M转动;当松开SB1时,接触器KM线圈失电,其主触点断开,电动机M停止转动。 当按下连续运行按钮SB2时,接触器KM线圈通电,其主触点闭合,电动机M转动;当松开SB2时,接触器KM线圈仍旧通电,其主触点闭合,电动机M保持转动状态,直至按下停止按钮SB3或SB1。 当按下停止按钮SB3时,接触器KM线圈失电,其主触点断开,电动机M停止转动。 为了保护电动机M,控制电路中设立了热保护继电器FR。当电动机M过载时,热保护继电器FR动作,接触器KM线圈失电,其主触点断开,电动机M停止转动。 例4:三相交流异步电动机正、反转及停止控制(1) 有一台三相交流异步电动机M,可以正转也可以反转,其转动方向由交流接触器KM1和KM2控制。 在电动机停止的情况下,当按下正向启动按钮SB1时,接触器KM1线圈通电,其主触点闭合,电动机M正向旋转,直至按下停止按钮SB3,接触器KM1线圈失电,其主触点断开,电动机M停止转动。 在电动正向运转的过程中,如果按下反向启动按钮SB2,电动机并不会反向运转,只有在电动机M停止后,才能够反向启动并运转,其运转由KM2控制实现,动作方式类似于KM1。在电动机M反向运转过程中,按下正向启动按钮SB1,效果相同。 为了保护电动机M,控制电路中设立了热保护继电器FR。当电动机M过载时,热保护继电器FR动作,接触器KM1和KM2线圈失电,其主触点断开,电动机M停止转动。 例5:三相交流异步电动机正、反转及停止控制(2) 有一台三相交流异步电动机M,可以正转也可以反转,其转动方向由交流接触器KM1和KM2控制。 在电动机停止的情况下,当按下正向启动按钮SB1时,接触器KM1线圈通电,KM1主触点闭合,电动机M正向旋转,直至按下停止按钮SB3,接触器KM1线圈失电,其主触点断开,电动机M停止转动。 在电动正向运转的过程中,如果按下反向启动按钮SB2,接触器KM1线圈立即失电,KM1主触点断开,同时接触器KM2线圈通电,KM2主触点闭合,电动机立即反向运转。
机器语言指令概述
6.4 机器语言指令概述 用汇编语言指令编写的汇编语言程序输入计算机后,计算机并不能识别和执行,必须由机器提供的汇编程序将它翻译成由机器语言指令组成的程序,才能由计算机执行。通常这种翻译工作不必由人来干预。本节只简单介绍一下机器语言指令的构成,以便读者在实际应用(实时控制)中也可完成类似的转换工作。 8086/8088的机器语言指令为可变字节的指令,一条指令可以由1~7个字节组成,因此指令格式比较灵活。其格式如下所示: 其中,opcode为操作码字段;d指示操作方向;S表示符号扩展;W指示操作数宽度;mod用来区分是寄存器寻址还是存储器寻址;reg寄存器编码;r/m寄存器或存储器; disp-low位移量低位; disp-high位移量高位;data-low立即数低位;data-high立即数高位。 格式中给出了1~6个字节的情形。如果指令中显示指定段跨越前缀,则在机器语言指令中使用放在该指令之前的一个字节来表示,其格式如下所示: 其中,001和110均为段前缀标志;SEG指定四个段寄存器中的一个,00为ES,01为CS,10为SS,11为DS。 6.4.1 操作码的机器语言表示 操作码一般占用第一个字节的7~2位,但有些指令的操作码占用第一个字节的7~1位,甚至还可能占用第二个字节的5~3位作为扩展操作码。 在多数操作码中,常使用某些位来指示某些信息。例如第一个字节中的W位用来指示该指令是对字节(W=1)还是对字节(W=0)进行操作。在双操作数指令中,d位指定寄存器是用于目的操作数(d=1)还是用于源操作数(d=0)。另外,在立即寻址方式的指令中,S位表示符号扩展,若立即数为8位, 6.4.2寻址方式的机器语言表示 指令中除操作码占用的位数外,其它位则用来表示操作数或操作数的地址。8086/8088用一个寻址方式字节来表示操作数的寻址方式,它通常是机器指令的第二个字节。 第二个字节中的reg字段表示寻址方式为寄存器方式,在双操作数指令的情况下,由reg和第一个字节中的W位联合指定一个寄存器作为两个操作数中的一个操作数。Reg与W位联合指定的寄存器如表6-4-1所示。
01 基本指令练习
可编程控制器实训 实验一基本指令练习 一、基本指令简介 LD,取指令。表示一个与输入母线相连的常开接点指令,即常开接点逻辑运算起始。 LDI,取反指令。表示一个与输入母线相连的常闭接点指令,即常闭接点逻辑运算起始。 OUT,线圈驱动指令,也叫输出指令。 LD、LDI两条指令的目标元件是X、Y、M、S、T、C,用于将接点接到母线上。也可以与后述的ANB指令、ORB指令配合使用,在分支起点也可使用。 OUT是驱动线圈的输出指令,它的目标元件是Y、M、S、T、C。对输入继电器不能使用。OUT指令可以连续使用多次。
LD、LDI是一个程序步指令,这里的一个程序步即是一个字。OUT是多程序步指令,要视目标元件而定。 OUT指令的目标元件是定时器和计数器时,必须设置常数K。 三、接点串联指令AND、ANI AND,与指令。用于单个常开接点的串联。 ANI,与非指令,用于单个常闭接点的串联。 AND与ANI都是一个程序步指令,它们串联接点的个数没有限制,也就是说这两条指令可以多次重复使用。这两条指令的目标元件为X、Y、M、S、T、C。 OUT指令后,通过接点对其它线图使用OUT指令称为纵输出或连续输出。这种连续输出如果顺序没错,可以多次重复。 四、接点并联指令OR、ORI OR,或指令,用于单个常开接点的并联。 ORI,或非指令,用于单个常闭接点的并联。 OR与ORI指令都是一个程序步指令,它们的目标元件是X、Y、M、S、T、C。这两条指令都是一个接点。需要两个以上接点串联连接电路块的并联连接时,要用后述的ORB指令。 OR、ORI是从该指令的当前步开始,对前面的LD、LDI指令并联连接。并联的次数无限制。 五、串联电路块的并联连接指令ORB 两个或两个以上的接点串联连接的电路叫串联电路块。串联电路块并联连接时,分支开始用LD、LDI指令,分支结束用ORB指令。ORB指令与后述的ANB指令均为无目标元件指令,而两条无目标元件指令的步长都为一个程序步。ORB有时也简称或块指令。 ORB指令的使用方法有两种:一种是在要并联的每个串联电路后加ORB指令;另一种是集中使用ORB指令。对于前者分散使用ORB指令时,并联电路块的个数没有限制,但对于后者集中使用ORB指令时,这种电路块并联的个数不能超过8个(即重复使用LD、LDI 指令的次数限制在8次以下),所以不推荐用后者编程。 六、并联电路的串联连接指令ANB 两个或两个以上接点并联电路称为并联电路块,分支电路并联电路块与前面电路串联连接时,使用ANB指令。分支的起点用LD、LDI指令,并联电路结束后,使用ANB指令与前面电路串联。ANB指令也简称与块指令,ANB也是无操作目标元件,是一个程序步指令。 七、主控及主控复位指令MC、MCR MC为主控指令,用于公共串联接点的连接,MCR叫主控复位指令,即MC的复位指令。在编程时,经常遇到多个线圈同时受到一个或一组接点控制。如果在每个线圈的控制电路中都串入同样的接点,将多占用存储单元,应用主控指令可以解决这一问题。使用主控指令的接点称为主控接点,它在梯形图中与一般的接点垂直。它们是与母线相连的常开接点,是控制一组电路的总开关。 MC指令是3程序步,MCR指令是2程序步,两条指令的操作目标元件是Y、M,但不允许使用特殊辅助继电器M。 八、置位与复位指令SET、RST SET为置位指令,使动作保持;RST为复位指令,使操作保持复位。SET指令的操作目标元件为Y、M、S。而RST指令的操作元件为Y、M、S、D、V、Z、T、C。这两条指令是1~3个程序步。用RST指令可以对定时器、计数器、数据寄存、变址寄存器的内容清零。九、脉冲输出指令PLS、PLF PLS指令在输入信号上升沿产生脉冲输出,而PLF在输入信号下降沿产生脉冲输出,这两条指令都是2程序步,它们的目标元件是Y和M,但特殊辅助继电器不能作目标元件。
汇编指令机器码总结
汇编指令机器码总结与验证 摘要:本文介绍了汇编指令机器码的含义与作用,并讨论了指令的组成结构即操作码与地址码。然后全面总结了机器码中的单字节操作码,并利用Debug工具进行了详细的验证。 关键词:指令;机器码 一、机器码概述[1] 机器语言是用二进制代码表示的计算机能直接识别和执行的一种机器指令的集合。这种指令集就称为机器码,它是电脑的CPU可直接解读的数据。一条指令是机器语言的一个语句,是一组有意义的二进制代码。计算机通过执行指令来处理各种数据。 为了指出数据的来源、操作结果的去向及所执行的操作,一条指令必须包含下列信息: a) 操作码 b) 操作数的地址 c) 操作结果的存储地址 d) 下条指令的地址 一条指令实际上包括两种信息即操作码和地址码。操作码用来表示该指令所要完成的操作(如加、减、乘、除、数据传送等),其长度取决于指令系统中的指令条数。地址码用来描述该指令的操作对象,它或者直接给出操作数,或者指出操作数的存储器地址或寄存器地址(即寄存器名)。 二、机器码详解[2] 由上文已知,一条指令一般由操作码和地址码组成。其中,操作码是指明CPU对内存或寄存器中的数据进行什么样的操作,地址码给出这些数据对象。下面我们就将指令分为两部分进行研究。1.操作码 操作码一般占用1个字节(8位)或2个字节(16位)。其中最低比特(记作W)在很多指令中表示目标操作数的位宽,W=0表示字节长(8位)操作数,W=1表示双字节长(16位)操作数。例如,操作码00000000B(W=0)表示“ADD 8位寄存器,8位寄存器”,而00000001B(W=1)表示“ADD 16位寄存器,16位寄存器”。 2.地址码 地址码一般占用1个字节,其中的8个比特位可分为三组,形式一般为“oommmrrr”。这些分组大致可分为以下四个类型: 1) “oo”——表示指令的地址偏移量类型 a) 00:如果mmm=110,那么指令后紧跟一个地址偏移量;否则未使用地址偏移量 b) 01:指令后紧跟一个8比特无符号地址偏移量 c) 10:指令后紧跟一个16比特无符号地址偏移量 d) 11:此时mmm表示一个寄存器而不是地址
汇编指令与机器码的相互转换
汇编指令与机器码的相互转换 机器语言我们只要重点理解一下几个概念: 1. 机器语言指令有操作码(OP)和地址码两部分组成 |_____________OP_______________|__d__|__w__| |_____________OP_______________|__s__|__w__| <--此格式用于立即寻址方式 在多数操作码中,常使用某些位来指示某些信息: 如图上结构里的:w=1 时对字来操作 w=0 时对字节来操作 d值在双操作数指令中才有效 当d=1 时有且只有一个寄存器用于目的操作数 d=0 时有且只有一个寄存器用于源操作数 s=1 时立即数为8位,但要求扩展成16位数 s=0 时当指令作字节操作/有16位立即数 由于汇编的指令格式很多,这里我只作一些基本情况介绍,必要时读者可以下载/查阅80x86汇编小站https://www.360docs.net/doc/5011237243.html,提供的OPCODES手册来查阅。 2. 寻址方式的机器语言表示: | mod | reg | r/m | |_____|_____|_____|_____|_____|_____|_____| reg 表示寄存器方式,在不包括立即数的双操作数指令的情况下,规定必须有一个操作数在寄存器中,该寄存器由reg字段指定,并与操作码字节中的w位相组合确定的寄存器 mod字段与r/m(register/memory)字段结合在一起确定另一个操作数的寻址方式现在你们下载了80x86汇编小站(https://www.360docs.net/doc/5011237243.html,)提供的OPCODES 手册了吗? 下载好了,请解压后打开里面的:opcodes.html 文件,然后熟悉里面的表格: 现在熟悉简单的: ____________________________________________________________________________ __ 表1
Linux常用命令训练习题1--答案
Linux常用命令训练 注:所有不存在的目录或文件都自己建立。 一、文件操作命令 1.查看当前目录下的包含隐藏文件在内的所有文件。(ls –a) 2.按修改时间查看当前目录下的后缀为“.c”的文件,采用长格式显示。 ls –t –l *.c 3.用file命令查看当前目录下所有文件 4.用file命令查看当前目录下所有以“.c”为后缀的文件信息 二、文件拷贝命令 1.将/usr/games目录下的所有内容拷贝到/vivi/bbb目录下
2.将用户目录下的文件“a.c”拷贝到该目录的子目录“program”下。 三、文件移动命令 1.将用户目录下的文件“1.c”移动到该目录的子目录“aaa”下,并覆盖该目录下的 2.c文件。 四、文件链接命令 1.在目录“~/program”下建立“~/a.c”的符号链接文件“b.c” 五、文件删除命令 1.强制删除目录“~/program”下的所有后缀为”.c”的文件 六、修改文件属性 1.修改文件“~/program/a.sh”权限为文件所有者可读、可写、可执行,其他所有者
可读、可执行,但不可写 2.修改文件用户目录下,aaa/目录里的2.c文件访问时间为当前时间。 七、创建目录 1.创建一个权限为所有者有读、写、执行权限,其他用户均为可读权限的目录,名为 ddd. 八、删除目录 1.删除用户目录中的aaa目录,并显示相关信息 九、修改当前目录 1.返回当前目录的父级目录
2.切换目录至/usr/tmp 十、查看当前目录 1.查看当前所在目录 十一、进入根目录的tmp目录,建立test1和test2两个文件夹,在test1中建立a.log, b.log 然后把a.log 硬连接到test2目录,b.log 软链接到test2目录 十一、关闭系统 1.重启系统 reboot 2.关闭系统 Init 0
单片机指令功能及其机器码一览表2008
单片机指令功能及其机器码一览表2008-8-23 4:53:00 1 推荐 助记符代码机器码说明 MOV A,Rn E8~EF 寄存器A MOV A,direct E5 dircet 直接字节送A MOV A,@Ri ER~E7 间接RAM送A MOV A,#data 74 data 立即数送A MOV Rn,A F8~FF A送寄存器 MOV Rn,dircet A8~AF dircet 直接字节送寄存器 MOV Rn,#data 78~7F data 立即数送寄存器 MOV dircet,A F5 dircet A送直接字节 MOV dircet,Rn 88~8F dircet 寄存器送直接字节 MOV dircet1,dircet2 85 dircet1 dircet2 直接字节送直接字节MOV dircet,@Ro 86~87 间接RAM送直接字节 MOV dircet,#data 75 dircet data 立即数送直接字节 MOV @Ri,A F6~F7 A送间接RAM MOV @Ri,#data 76~77 data 直接字节送间接RAM MOV @Ri,#data 76~77 data 立即数送间接RAM MOV DPTR,#data16 90 data 15~8 16位常数送数据指针 data7~0 MOVC A,@A+DPTR 93 由((A)+(DPTR))寻址的程序存贮 器字节选A MOVC A,@A+PC 83 由((A)+(PC));寻址的程序存贮器字节送A MOVX A,@Ri E2~E3 送外部数据(8位地址)送A MOVX A,@DPTR E0 送外部数据(16位地址)送A MOVX @Ri,A F2~F3 A送外部数据(8位地址) MOVX @DPTR,A F0 A送外部数据(16位地址) PUSH dircet C0 dircet 直接字节进栈,SP加1 POP dircet D0 dircet 直接字节退栈,SP减1 XCH A,Rn C8~CF 交换A和寄存器 XCH A,dircet C5 dircet 交换A和直接字节 XCH A,@Ri C6~C7 交换A和间接RAM XCH A,@Ri D6~D7 交换A和间接RAM的低位 SWAP A C4 算术操作(A的二个半字节交换) ADD A,Rn 28~2F 寄存器加到A ADD A,dircet 25 dircet 直接字节加到A ADD A,@Ri 26~27 间接RAM加到A ADD A,#data 24data 立即数加到A ADD A,Rn 38~3F 寄存器和进位位加到A
计算机应用基础知识概述
第1章 计算机应用基础知识概述 第2讲 计算机应用基础知识概述(二) 教学目标及基本要求: 1、掌握计算机软件系统的构成,软件的概念、特点及分类 2、了解指令、语言、程序的概念。 3、掌握计算机的基本工作原理。教学重点: 软件的概念、特点,存储程序原理。教学难点: 存储程序原理。教学内容: 1、系统软件、应用软件 2、程序设计语言、计算机的指令、计算机的程序 3、计算机的工作原理、计算机的基本工作过程教学时间: 1学时 主要内容: 1.3.3 计算机软件系统的构成 软件:在硬件设备上运行的各种程序以及有关资料,主要由程序和文档两部分组成。 1.系统软件 指管理、监控和维护计算机资源(包括硬件和软件)的软件。它是为整个计算机系统所配置的、不依赖于特定应用领域的通用性软件。它扩大了计算机的功能,提高了计算机的工作效率。系统软件是不可少,一般由生产厂家或专门的软件开发公司研发,其他程序都在它的支持下编写和运行。系统软件主要包括操作系统和实用系统软件。(1)操作系统 ? 概念:操作系统(Operating System ,OS )是直接运行在裸机上的最基本的系统软件, 是系统软件的核心,其他软件必须在操作系统的支持下才能运行。它控制和管理计算机系统内各种软、硬件资源,合理有效地组织计算机系统的工作。 ? DOS 、Unix 、Windows (95、98,2000、xp 等) (2)实用系统软件 ① 语言处理程序 ? 概念:将非机器语言的程序通过解释或翻译成与其相对应的机器指令后,使其被计算机 执行。 ? 要点: ● 计算机只能直接识别和执行机器语言程序。非机器语言的程序必须通过解释或翻译 成与其相对应的机器指令后,才能被计算机执行 ● 一般将用高级语言或汇编语言编写的程序称为源程序,而将已翻译成机器语言的程 序称为目标程序,不同高级语言编写的程序必须通过相应的语言处理程序进行翻译。 ● 计算机将源程序翻译成机器指令时,通常有两种翻译方式:编译方式和解释方式, 具体如图1-7所示。 图1-7 计算机语言处理程序的翻译过程 ● 经编译方式编译的程序执行速度快、效率高。 ● 语言处理程序主要有:汇编程序、解释程序和编译程序。汇编程序用来处理汇编语
简介机器语言
机器语言 机器语言(machine language)是一种指令集的体系。这种指令集,称机器码(machine code),是电脑的CPU可直接解读的数据。机器码有时也被称为原生码(Native Code),这个名词比较强调某种编程语言或库,它与运行平台相关的部份。机器语言是用二进制代码表示的计算机能直接识别和执行的一种机器指指令系统指令系统 令的集合。它是计算机的设计者通过计算机的硬件结构赋予计算机的操作功能。机器语言具有灵活、直接执行和速度快等特点。 [1] 一条指令就是机器语言的一个语句,它是一组有意义的二进制代码,指令的基本格式如,操作码字段和地址码字段,其中操作码指明了指令的操作性质及功能,地址码则给出了操作数或操作数的地址。[2] 用机器语言编写程序,编程人员要首先熟记所用计算机的全部指令代码和代码的涵义。手编程序时,程序员得自己处理每条指令和每一数据的存储分配和输入输出,还得记住编程过程中每步所使用的工作单元处在何种状态。这是一件十分繁琐的工作。编写程序花费的时间往往是实际运行时间的几十倍或几百倍。而且,编出的程序全是些0和1的指令代码,直观性差,还容易出错。除了计算机生产厂家的专业人员外,绝大多数的程序员已经不再去学习机器语言了。 2指令格式计算机的指令格式与机器的字长、存储器的容量及指令的功能都有很大的关系。从便于程序设计、增加基本操作并行
性、提高指令功能的角度来看,指令中应包含多种信息。但在有些指令中,由于部分信息可能无用,这将浪费指令所占的存储空间,并增加了访存次数,也许反而会影响速度。因此,如何合理、科学地设计指令格式,使指令既能给出足够的信息,又使其长度尽可能地与机器的字长相匹配,以节省存储空间,缩短取指时间,提高机器的性能,这是指令格式设计中的一个重要问题。 计算机是通过执行指令来处理各种数据的。为了指出数据的来源、操作结果的去向及所执行的操作,一条指令必须包含下列信息: (1)操作码。它具体说明了操作的性质及功能。一台计算机可能有几十条至几百条指令,每一条指令都有一个相应的操作码,计算机通过识别该操作码来完成不同的操作。 (2)操作数的地址。CPU通过该地址就可以取得所需的操作数。(3)操作结果的存储地址。把对操作数的处理所产生的结果保存在该地址中,以便再次使用。(4)下条指令的地址。执行程序时,大多数指令按顺序依次从主存中取出执行,只有在遇到转移指令时,程序的执行顺序才会改变。为了压缩指令的长度,可以用一个程序计数器(ProgramCounter,PC)存放指令地址。每执行一条指令,PC的指令地址就自动+1(设该指令只占一个主存单元),指出将要执行的下一条指令的地址。当遇到执行转移指令时,则用转移地址修改PC的内容。由于使用了PC,指令中就不必明显地给出下一条将要执行指令的地址。 一条指令实际上包括两种信息即