雷达功能熟悉
搜救雷达应答器(SART)简介
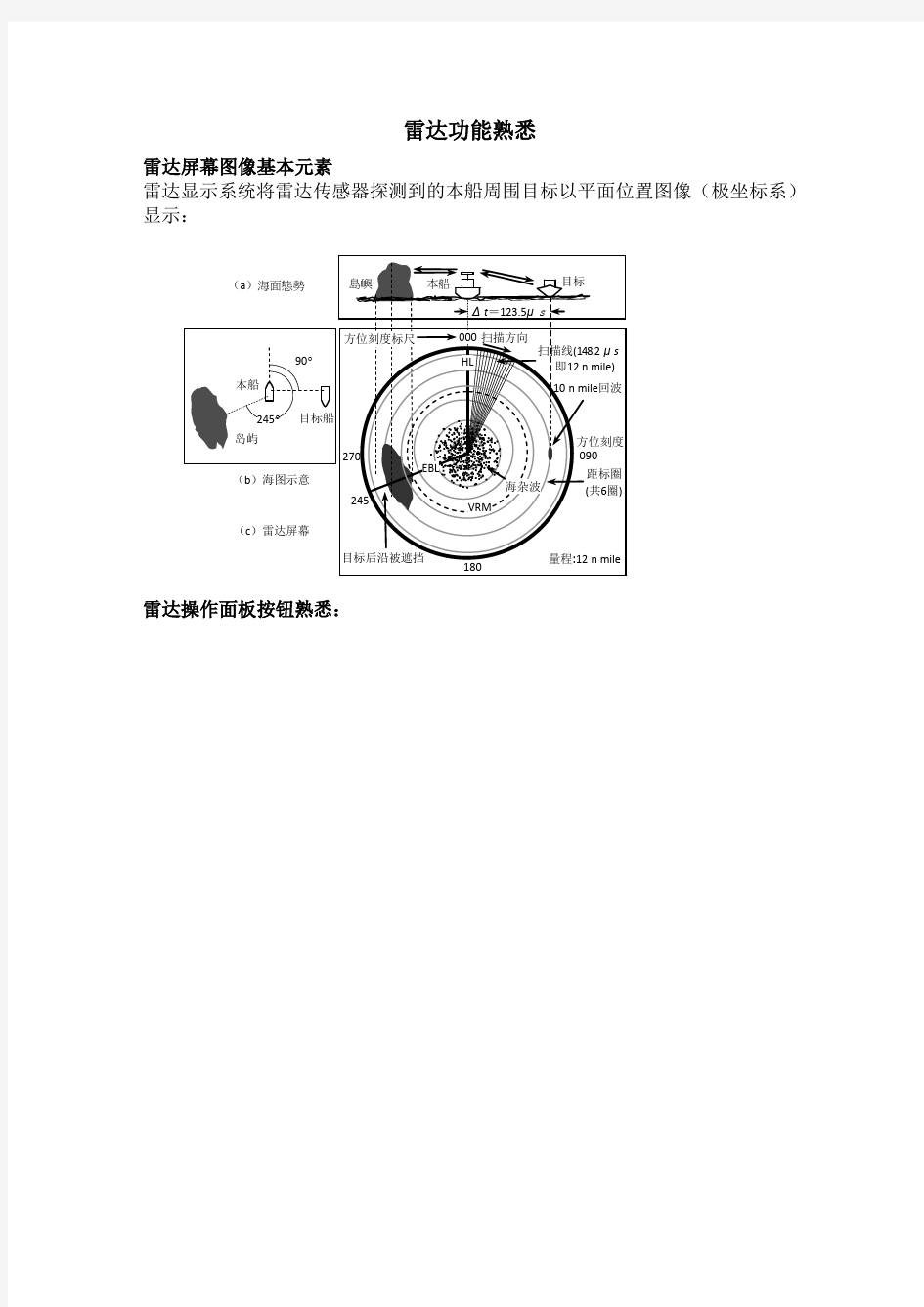
搜救雷达应答器(SART)简介 看完本帖之后,你将会对搜救雷达应答器有全新的认识。废话不多说,直接上干货!!! 搜救雷达应答器SART—Search and Rescue Radar Transponder。 一、SART的功能及原理 在GMDSS 系统中,遇险船可利用各种手段进行遇险报警,报警 信息中,包含遇险船舶的位置信息,但是由于受到客观原因的制约,
例如遇险船舶使用的定位系统的精度等因素的影响,遇险船舶或幸存者报告的位置与实际的位置可能存在一定的误差和变化,考虑到遇上恶劣海况、浓雾或黑夜,现场搜救幸存者的工作难度很大。为尽快发 现幸存者,在GMDSS 系统中,公约船都按要求配备了搜救雷达应答器,解决了现场搜救不易发现失事地点或幸存者的问题,使得遇险船舶、救生艇或幸存者可能被迅速发现和获救。 搜救雷达应答器是GMDSS 系统中用来近距离确定遇难船舶、救生艇筏及幸存者位置的主要方式。SART 是遇险现场使用的设备,能引导搜救飞机或搜救船舶尽快地搜寻到遇险者,并可让持有SART的幸存者知道是否有救助飞机,或救助船舶在靠近他们。 搜救雷达应答器实际上是一个被动触发式的雷达信号产生器,当
船舶在海上遇险,由人工启动使其处于待命状态,在没有被雷达信号触发前,设备处于接收状态,当被9G Hz X-band导航雷达波触发以后,应答一个雷达信号,以在9GHz的雷达屏幕上形成有12个菱形辉点组成的直线来显示遇险者的相对方位,使搜救船舶和飞机非常容易就能够发现和辨别。 SART标志信号在雷达显示器上的视觉效果,如下图所示。其中(a)图描述的是双方距离较远时的情形。随着双方距离渐进,雷达 所收到的SART信号也逐渐增强,因而在大光点附近会逐渐出现小光点。这主要是SART应答雷达波的回扫信号造成的。当距离近至约1n mile 甚至更近时,雷达天线的旁瓣方向也能接收到SART的信号,导致雷达显示器上的标志信号由12个光点逐渐扩展为12条弧线,如下图(b)所示。再近时则形成12个同心圆,如下图(c)所示。这时的标志信号只能用来测距,却无法用来测量方位。为避免出现上述情况,要求搜救雷达的操作员必须随距离的逐渐接近,适时降低雷达增益。始终保持雷达显示器上SART标志信号成12个光点状态。 另外,在SART上还同时设有声、光指示装置,以便遇险幸存者
地质雷达0-SIR-3000用户手册
TerraSIRch SIR-3000用户手册 美国地球物理测量系统公司
TerraSIRch SIR-3000用户手册 (1) 第一部分介绍 (1) 1.1仪器配置Unpacking Your System (1) 1.2概述General Description (1) 硬件连接Hardware Connections (1) 第二部分启动和设置TerraSIRch (6) 2.1 硬件设置Hardware Setup (6) 2.2 系统启动与显示 Boot-Up and Display Screen (8) 数据显示窗口 Data Display Windows (9) 2.3 系统模式和菜单:概述 System Modes and Menus (10) 系统菜单SYSTEM (10) 采集菜单COLLECT (12) 雷达Radar (12) 扫描SCAN (13) 增益GAIN (15) 信号位置POSITION (16) 滤波器FILTERS (17) 回放菜单PLAYBACK Menu (18) 扫描SCAN (18) 处理PROCESS (19) 输出菜单OUTPUT Menu (19) 显示DISPLAY (19) 数据传输Transfer (20) 2.4: 命令栏Command Bar (20) 参数设置模式In Setup Mode (20) 运行模式(In RUN Mode) (22) 第三部分TerraSIRch设置采集参数 (24) 3.1: 二维采集参数设置 (24) 第一步:系统启动 (24) 第二步:检查参数 (24) 打开参数设置文件 Load SETUP (24) 测量轮标定 Survey Wheel Calibration (25) 测量轮的缺省设置: (26) 检查时间窗口 Check RANGE (27) 检查扫描数/单位距离 Check SCN/UNIT (27) 检查增益 Check GAIN (28) 第三步:资料采集 (28) 3.2 TerraSIRch模式下设置参数采集单个文件以做三维测量 (29) 第一步:系统启动。 (29) 第二步:检查采集参数树下的各个参数。 (29) 打开参数设置表 Load SETUP (29) 检查测量模式 Check MODE (29) 检查时间窗口 Check RANGE (29)
雷达功能键基本操作
YM COSMOS雷達功能鍵基本操作 ●通則:記憶槽中上方為A槽,下方為B槽。每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。 或或S band。 WG84:GPS系統規格。 相對風向及風速。 。 ●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按 心。 自動。 ●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。 長脈波。 記錄當時各船之位置及時間。 改善與設定白天及晚上之面板及螢幕之亮度。 1.DAY:白天模式。 2.NIGHT1:夜晚模式1。 a.HEADING LINE:船艏線亮度。 b.EBL/VRM:電子方位線/可變距離圈亮度。 c.CURSOR:游標亮度。 d.ARPA:自動雷達測繪援助亮度。 e.TOOLS/RANGE RINGS:工具/距離圈亮度。 f.ROUTES:航路亮度。 g.HISTORY TRACKS:航跡亮度。 h.MAPS:海圖亮度。 i.MENU TEXT:清單信文亮度(?)。 j.TARGET ALARM:目標警報亮度。
k.ALARM TEXT:警報信文亮度。 l.EXIT BRILLIANCE:離開光亮調整。 m.DEFAULT BRILL:不執行亮度調整。 n.PANEL BRILL+:面板亮度增加。 o.PANEL BRILL-:面板亮度減少。 3.NIGHT2:夜晚模式2。 4.NIGHT3:夜晚模式3。 調整螢幕強度。 1.Mode system:。 2.mode RX:。 對地速度, through the water):對水速度。以左鍵按NAV可選船速資料之來源.游標移至數字欄(變黃)可手動輸入。 ●選C,D,M,V,T。 ,,。 相對運動目標相對運動模式。 相對運動目標真運動模式。 真/相對向量模式時間。 真艉跡顯示時間。 99分,將會顯示”PERM”。 (?)。 ●Warning Prompts:警告提醒。 按ERBL,於EBL上出現一小圈,表示距離。 ●快速方位及距離開啟,將游標移至雷達掃瞄幕中,按左鍵持續3秒左右,可快速顯示EBL及VRM。 ●EBL 1/VRM 1只用於本船中心, EBL 2/VRM 2可用於本船中心及偏離本船。 a: Centred: EBL/VRM以本船為中心基點.b: OFF-Centred:不以本船為為中心.c: Carried(通過,攜帶):本船移動,EBL/VAM同步移動,d: Drcpped: 本船移動,EBL/VAM不動。 自動追蹤援助)電子測定援助) Radar plotting Aid(自動雷達徹測定援助)。 ●以游標置於目標向量上按右鍵,可取右鍵取消目標測定。 ●手動測定目標僅用於0.5nm~48nm。 ●如電羅經故障、不穩定之顯示、於備便狀態、或Range Scales 0.5nm~48nm,將無法測定目標。 ●雷達目標如出現1.╬:目標過船艏之距離低於設定值。2.△:CPA/TCPA小於設定值。3.▽:目標進入自動測定區。4.◇:無法測定目標,在最後六次雷達脈波發射前,發出警告。5.?:開始計算目標。
雷达应答器操作方法
RT-9雷达应答器的操作 雷达应答器的的用途是为了使遇难者向行在附近的其他船舶显示出遇险人员或遇险船舶的位置。使他们得知是否有救助船舶或飞机在靠近他们,以增强他们的获救信心。 SRT-9 SART的操作可分为自检操作和工作操作两种方式。 1. SART的自检操作 为了保证S A R T始终处于正常工作状态,应对S A R T进行定期检查,本机的自检操祚方法是: ㈠就地自检的开启与关闭 ①将SART设备从船上的专用托架上解除下来. ②将本设备所配备的电源开启专用探针{或称推杆}拿在手中。 ③将专用探针插入机器中部的直径为3mm电源开关孔中,一定要插牢固,防止损坏封条,而后推动自检开关。 此时,机器将开始自捡工作,每隔2秒钟,有规律的发出声{嘀嘀}光{红色闪烁}报警。只要符合此规律,就表明机器工作正常。否则,就必须送到工厂维修。自检时间一般不要超过30S。 ④检查完毕后,将专用探针再插入机器中的直径为6mm的孔中,而后推动开关即可关闭机器的电源,完成了一次对机器的自检操作。 RT-9 SART的人工启动操作 当船舶遇险时,MCMURDO RT-9 SART应人工启动,以准备响应9GHz雷达发射的探测脉冲。具体操作方法是: ①将SART设备从船上的专用托架上解除下来,并带上救生艇筏。 ②将本设备的电源开关开启,此时,机器将开始工作,每隔大约12秒钟左右,机器将有规律的发出声{嘀嘀},光{红色闪烁}报警。此时SART处于只收不发状态。当有搜船舶或飞机到达本船舶附近的海面时,由于搜救船舶或飞机上的9GHz导航雷达不断地发射探测脉冲,SART对9GHz的探测脉冲进行响应。在每一次9GHz探测脉冲作用之后,立即发12个频率变化范围在9200MHz-9500MHz的微波信号. 机器的声光报警的时间间隔将缩短, 光闪变快. ③当搜救工作完毕后, 将专用探针再插入机器上的专用直径为6mm的孔中, 即可关闭机器的电源.
激光雷达的基本技术
第二章 激光雷达的基本技术 如前所述,激光雷达的种类繁多、结构各异,其整机形式及体积重量也很不相同。为说明这一特点,图2.1~2.4给出了几种典型的激光雷达外观图。其中,图2.1~2.2为两种大型的激光雷达。而图2.3~2.4则为两种小型激光雷达。尽管如此,对所有的激光雷达而言,有一点是共同的,它们都是 图2.1 NASA 平流层气溶胶Lidar 照片 图2.2 欧共体 ALOMAR Lidar 图 2.3 IAP RMR 激光雷达 图2.4 便携式激光雷达
由发射、接收和信号处理三个主要部分组成。并且再分下去,这三部分又都由激光器、发射光学、接收光学、窄带滤光、通道分光、光电探测器和信号处理电路(通常包括微型计算机)等几个部件组成。此外,在由部件组成激光雷达时,都会涉及发射光束和接收视场的匹配,联调或同步扫描等技术问题。也就是说,在不同的激光雷达中都需要采用一些共同的部件或整机技术。因此,本书在讲述各种具体类型激光雷达之前,先对这些共同的激光雷达部件技术作简要的介绍。 2.1 发射系统技术 2.1.1 发射激光器 激光器用来产生发射激光束,故常称用于激光雷达的激光器为发射激光器。发射激光器是激光雷达中最为重要的技术部件,它的质量往往在很大程度上决定了激光器的探测性能。对用于激光雷达的激光器,通常有如下要求: 1.有较大的输出功率,且大多数都需要工作于脉冲方式,因此相应的要求是脉冲能量大、脉冲重复频率高。 2.激光的光束质量好,特别是要求光束的发散度要小、指向性要好。 3.对于工作于差分吸收或荧光机制的激光雷达,还要求激光输出波长处于特定光谱范围或要求其可以调谐。 4.通常还要求激光器体积、功耗小,性能稳定可靠等,以满足激光雷达多种运载方式的要求。 能基本上满足上述要求的激光器有很多种,范围涵盖了以固体、气体、液体和半导体为工作物质的各种激光器。但是,真正经常用于激光雷达的激光器实际上有少量几种,现分别简介如下:1.Nd:YAG激光器 Nd:YAG激光器是一种典型的固体工作物质的激光器。由于它多方面的优良性能,在激光雷达中获得最为广泛的应用。 Nd:YAG激光器的原理结构示于图2.5。它主要由激光工作物质Nd:YAG棒,由M1和M2两块腔镜组成的激光谐振腔和闪光灯及其电源三个主要部分组成。至于图中的Q开关,它是为了形成窄脉冲输出激光用的,从原理上讲,并不属于Nd:YAG激光器的工作物质、谐振腔和激励源三个必要部分。 图2.5 Nd:YAG激光器
K2FastWave中文操作手册
INGEGNERIA DEI SISTEMI S.p.A. Rev.3.1 Protocol: MN/2008/005 雷达数据采集软件K2-FW 用户手册 2008年09月
版本升级 版本日期修改原因 Rev. 2.0 2004年11月第二版(加入附录E,F,G,H) Rev. 2.1 2005年8月升级,加入手动增益和删除扫描 Rev. 2.2 2005年12月增加结构物工具类型(和附录J) Rev. 2.3 2006年3月引入Webex支持中心(第6.2节) 本手册所涵盖的软件版本 01.01.000,01.02.000,01.02.002,01.07.000,02.00.000 声明 IDS 公司对设备不正常使用所造成的后果不承担相关责任 IDS 公司对软件不正常使用所造所的后果不承担相关责任. IDS 作为该专用软件的知识产权拥有者,有权在未提前通知用户的情况下对软件进行更改。 联系方式 IDS Ingegneria dei Sistemi S.p.A. Via Sterpulino 20 56121 PISA(Loc. Ospedaletto) Tel:+39.050.967.122 Fax:+39.050.967.121 客户服务中心: customercare.gpr@ids-spa.it
目录 1. 概览 (1) 1.1如何使用本手册 (1) 2. 系统硬件的配置 (2) 2.1DAD控制单元 (2) 2.2笔记本电脑 (3) 2.3连接DAD控制单元与笔记本电脑 (4) 3. 系统的软件设置 (6) 3.1软件安装与设置 (6) 4. 采集软件的使用 (9) 4.1启动采集软件 (9) 4.2选择驱动 (10) 4.3增益标定 (13) 4.3.1 高级设置菜单 (19) 4.4选择测区 (21) 4.5设置采集参数 (23) 4.6数据采集 (27) 4.7查看模式操作 (30) 5. 错误信息及报警 (34) 5.1错误信息 (34) 6. 在线帮助 (35) 6.1如何安装“S YMANTEC PCA NYWHERE”软件 (35) 6.1.1 使用电话连接养护 (36) 6.2使用W EBEX S UPPORT C ENTER远程协助 (37) 6.2.1 如何使用Webex服务 (37)
FURUNO雷达使用说明书
23’’高分辨率多彩液晶显示屏航海雷达 (ARPA和AIS功能于一体) 型号FAR-2817/2827/2837S 产品说明书 1、先进的信号处理,改进了在恶劣海况下探测的精度 2、液晶显示屏提供更清晰的雷达图像 3、设计符合SOLAS公约对所有运输船舶的要求 4、高达4台以上的雷达可以通过网络交换数据信息 5、自动绘制/跟踪100个自动或手动捕捉的物标 6、通过可定制的简易操作功能键,轨迹球/轮掌模块和旋转控制
7、低于磁控管会议ITU-R制定的多余排放标准 8、可以显示1000个配备AIS的船舶目标 FURUNO的用户良好的操作概念和领先的前沿技术相结合,性能可靠,安装方便 全键盘式控制单元 控制面板由逻辑性控制组合按键和轨迹球相结合,并组织良好的菜单,确保所有操作可以通过轨迹球。 手掌式控制单元 代替全键盘控制单元,实现远程操控
革命性的far-28x7系列X和S波段雷达是FURUNO50年的海洋电子经验和先进的计算机技术的结果。本系列是满足国际海事组织的严格标准(IMO)为所有船舶研制的。 显示单元采用23.1“液晶显示器,提供了一种有效的大于340毫米直径的图片。高级扩展图形阵列显示器提供了更清晰的雷达图像,可以在任何光照条件下轻松观察,有白天和黑夜两种背景颜色可供选择。不同的颜色被用于标志、符号和文本,更方便于用户操作。 目标检测是通过复杂的信号处理增强技术。两个警戒区可以在任何量程和区域内设置,满足用户要求。其他船舶的运动是通过先进的目标评估跟踪软件和CPA/TCPA数据读数。当在AIS应答器范围内,该far-28x7系列可以显示任何配备AIS的船舶。 雷达天线有4,6.5,和8英尺三种天线。对X波段,转速选择,24转为标准的雷达转速,或42转的高转速。S波段雷达也可用10
雷达应答器(Racons)的未来.
雷达应答器(Racons)的未来 作者:Dr. Nick Ward 背景 IMO海上安全委员会(MSC)的第79次会议在第192/(79)号决议中通过了雷达性能的新标准,从2008年开始取消其对对S波段雷达应答器的触发要求。该措施旨在促进新技术的引入(如相干调制),以促进未来雷达改善在杂波中探测目标的能力,进而提高安全性。这些技术还可以减少失真发射和带外发射,促进频谱的有效利用。 从2008年开始,这些技术可以应用于新的S波段雷达。S波段在恶劣的雨雪杂波环境下尤其有用。由于其探测能力和显示优势,S波段雷达被普遍认为更适于作为APRA(自动雷达标绘装置)/避碰雷达。 尽管该新技术旨在提高安全性,但使用这种技术的雷达几乎都不触发现有的雷达应答器。 雷达应答器被认为是一种非常重要的助航工具,因为他们能够在可见度非常差的情况下识别并定位航标而不依赖GNSS。总的来说,与新雷达技术兼容的雷达应答器能够研发出来,但目前对这些新技术还没有相关的行业标准或建议。 目前对于应用新技术的S波段雷达的强制装载要求还没有提上日程。同样,对于现有的S波段雷达的逐步淘汰也没有日程计划。新技术雷达会有一些新的操作特性,需要对操作员进行培训。 对X波段雷达的要求没有任何改变。在可预见的未来,仍要求X波段雷达触发并搜寻雷达应答器及救生艇雷达应答器(SART)。新技术S波段雷达的出现,将成为决定X波段雷达未来发展计划的一个因素,因此,有人建议IMO 修改对SART的要求,将其从基于雷达转变为基于AIS或其他技术。 新技术雷达 国际海上无线电委员会(CIRM)的Norris教授曾解释说,雷达技术不断变化,为鉴别杂波性能的提高提供了潜力――用户认为目前的航海雷达的性能在这方面不能满足要求。更有效的带宽控制也能够改善与其他射频用户的兼容性(更低射频干扰)。 期望的解决方案减少高耐压元件的使用数量,从而提高可靠性,并有希望最终取消有寿命限制的元件。这样就能够实现更高的电子集成度,进一步提高可靠性(元件依赖性降低)并最终降低成本。 未来也有可能实现与可承受价格的、对无线电波束敏感的定相阵列型天线与可行的静止(非旋转式)天线系统相
激光雷达(LiDAR)——参数才是决定激光光源选择的因素
激光雷达(LiDAR)——参数才是决定激光光源选择的因素 对于LiDAR(激光性能考量因素高峰值功率(几十千瓦至几十兆瓦)脉冲(纳秒范围)的固态激光器已用于LiDAR数十年,尺寸、重量、成本、功耗、液体冷却、冲击与自动驾驶车辆LiDAR据ABI Research最近的一项调查显示,到2026年1月,汽车上的LiDAR设备数量将达到6900万部。正如Keopsys集团(拉尼翁,法国)的Frederic Chiquet、研发经理Guillaume Canat和首席执行官Marc le Flohic所解释的那样,现存两类主要的自动驾驶汽车LiDAR系统:3D Flash LiDAR和扫描式LiDAR。Flash LiDAR使用的是广角发射源和广角光学系统(例如鱼眼镜头),将在单个发射过程中获得的反散射光集中于矩阵探测器上,以获得用于模拟车辆周围区域的所有飞行时间(ToF)数据。相反地,扫描式LiDAR可以逐行地处理3D环境;光在每个方向上依次发射,对应的回声由探测器逐个检测。符合用眼安全的激光源必须以脉冲模式工作,光束需强大到能够探测到100米外穿深色衣服的行人,工作温度为-40到85°C,并且可发射出测距精度达10厘米的脉冲。许多LiDAR光源是基于激光二极管,也有非制冷光纤激光器,较激光二极管有诸多的优势,如拥有高功率光束分裂和使用光纤路由到多个传感器位置的能力。使用主振荡器功率放大器(MOPA)结构中,一种典型的1550 nm LiDAR的光纤激光器的脉冲重复率达到5~250 kHz,功率水平分别为10~15 kW和200~300 W。脉冲激光二极管和光纤激光源用于自动驾驶汽车LiDAR的应用对比研究如下。 自动驾驶车辆LiDAR应用中脉冲激光二极管和光纤激光器来源的比较(来源:Keopsys 集团)专用于自动驾驶汽车的脉冲激光二极管是混合器件。激光芯片安装在由MOSFET 晶体管触发的电容器中。每当晶体管的栅极开启时,电容器内积累的电荷就会被释放到芯片中,从而释放出光脉冲。尽管此类型光源的性价比不错,相比昂贵的1550nm InGaAs 光电二极管,其905 nm的输出很容易被硅探测器检测到,但激光二极管具有有限的脉冲重复率和较低的峰值功率,并且受到过热效应的限制。3D Flash LiDAR的激光二极管光源是基于二极管堆叠技术,用几个边缘发射器垂直封装在一起,每层之间均由一层薄的散热
美国劳雷公司地质雷达中文版说明书
软件用户手册 美国地球物理测量系统公司美国劳雷工业公司翻译 2004年9月
第二章显示、编辑、打印雷达数据 (3) 概述General Overview (3) 推荐数据处理顺序Recommended Data Processing Sequence (3) 编辑文件头Editing the File Header (5) 数据显示选项Data Display Options (7) 显示参数设置Display Parameters Setup (14) 线扫描显示参数Linescan Display Parameters (15) 波形显示参数Wiggle Display Parameters (18) 示波器显示参数O-Scope Display Parameters (21) 其它显示选项Other Display Options (24) 交互显示Interactive Display (25) 编辑数据Editing the Data (29) 显示数据Viewing the Data (29) 去除不必要的信息Removing Unnecessary Information (30) 保存为单独文件Saving the Selection in a Separate File (35) 编辑标记Editing the Markers (36) 标记类型 (36) 标记数据库选项 (37) 打开标记编辑对话框 (38) 标记信息浏览 (39) 标记编辑 (40) 去标记To Delete A Marker (41) 加标记To Add A Marker (41) 手动修改标记类型To Manually Change Marker Type (42) 做图片出报告Generating Displays For Reports (44) 打印文件Printing a File (46)
船舶驾驶JRC航海雷达中文操作说明书
ARPA雷达(JMA 9823/9833)操作说明 一、按下PWR键,绿灯亮,3分钟后出现STAND BY,按下TX/STBY键,雷达开始工作;再按TX/STBY可停止发射,设备在预备状态。 二、调整SEA、RAIN、GAIN和BRILL钮,选择RANGE量程,调节TURN钮至物标清晰出现在荧光屏上;SEA、RAIN和TURN分别有手动和自动,但是雨雪和海浪不能同时自动。 三、捕捉物标,按下ACQ MANUAL键,移动光标到物标上,按下左键,物标被捕捉。最多可捕捉50个物标。 四、读取物标数据,按下TGT DATA键,将光标移动到物标上,按下左键,物标数据被读取。 五、取消物标,按下ACQ/CANCEL键,将光标移动到物标上,按下左键,物标被取消。 六、设置方位线、距离圈,按下EBL和VRM键,荧光屏出现方位线、距离圈,旋转EBL 和VRM钮,设置方位和距离。 七、按下AZI/MODE键,进行真北、真运动、相对运动等选择。 八、按下PL键改变发射脉冲宽度。 九、按下TRUE/REL、VECT/TIME键进行真矢量和相对矢量选择。 十、按下TM/RM键,进行真运动和相对运动选择。 十一、按下OFF/CENT键进行偏心显示。 十二、按下MENU键有9个子菜单, 1.IR,按下此键抑制同频干扰(如附近有SART信号应关闭此键)。 2.TGT ENH,按下此键为目标放大功能。 3.PROCESS,程序键。 4.FUNCTION,功能键。 5/ 6.EBL1/EBL2,电子方位线。 7.DATA OFF,按下此键关闭荧光屏部分数据。 8.SUB1 MENU子菜单,按下此键进入下一子菜单: ①SETTING-设置罗经、速度、日期时间等内容,此雷达关机后罗经不能跟踪,故开机后要输入罗经航向。 ②LEVEL-按此键调节亮度。 ③NA V/MAP-导航及转向点信息。 ④TRACK-航迹设定。 ⑤APRA/AIS-设定CPA、TCPA、AIS功能。 ⑥PIN-设置个人信息。 ⑦ISW-两部雷达互换发射机和天线。 ⑧EBL MANEUVER-手动电子方位线。 ⑨SUB2-此菜单调节显示器的颜色。 9.DEGAUSS-按下此键荧光屏消磁。 10.EXIT-按此键退出菜单。 十三、按下DAY/LIGHT钮可调整亮度。 十四、TRAILS钮为尾迹显示。
应急通讯设备操作须知
文件号: SPM-12-11文件名称: 应急通讯设备操作须知 发布日期:2011.07.01 生效日期:2011.08.01 版本: C-01 页次:第 1 页共 3页 1范围 1.1本须知的制定是为了使船舶有关人员,特别是GMDSS操作员能更加了解在操作船舶 应急通信设备时应注意的事项,以保障应急通信设备得到正确的操作,保证船舶在紧急和遇险时能及时发出报警信号和使应急通信能正常进行。 1.2本须知简述了在船上所安装的应急通信设备的一般操作内容和要求,具体操作应根据 具体设备和机型,参照说明书进行。 1.3本须知适用于公司船舶。 2引用标准 交通部《船用通信、导航设备的安装、使用、维护、修理技术要求》。 3实施步骤 3.1卫星紧急无线电示位标(EPIRB)的操作 3.1.1应熟悉设备的检验测试方式和手动,自动的工作方式及关闭的操作。 3.1.2规定每三个月由主管人员对设备进行一次检验测试,结果记入检验记录表。 3.1.3卫星示位标平常放在可自浮启动的位置,人工启动时须使其离开原位,或自动发 射,或按要求打开开关。 3.1.4在非弃船情况下,要启动示位标发射遇险报警,需经船长同意. 3.1.5弃船时,如条件许可,必须把卫星示位标带到救生艇(筏)上。 3.1.6在发出遇险信号后,当用其它通信设备与搜救机构或船舶联系上时,应及时关闭 示位标。 3.2搜救雷达应答器(SART)的操作。 3.2.1应熟悉该设备的试验、开启、应答和关闭的操作。 3.2.2每三个月由主管人员对设备进行一次检验,并把结果记入检验登记表。 3.2.3SABT只是在救生艇上使用,弃船时根据应急部署带到救生艇(筏)上。 3.2.4在救生艇(筏)上应启动SART,使其处于预备状态。并设法固定使其天线离水面一 米以上。 3.2.5当SART发出声光报警时,即接收到2公分雷达信号和发出9GHZ雷达的应答信 号,此时应配合以其它通信手段与搜救人员联系。 3.3救生艇(筏)用双向甚高频无线电话。 3.3.1此设备在紧急情况时在救生艇上作现场通信用,平时不得挪作他用。 3.3.2每月应保证机内电池处于充满电状态。 3.3.3每月应对设备进行一次试验检查,确保机器处于正常状态。 3.3.4紧急情况下应将此设备带到救生艇(筏)上, 3.3.5为保证在搜救时能正常通信,此设备应与雷达应答器配合使用。当雷达应答器发 出声光报警再打开此机,在l 6频道守听或呼叫。 3.4无线电话遇险频率值班接收机操作 3.4.1操作人员应熟悉面板上各个开关和旋钮的功能和操作方法。 3.4.2开航时打开电源,将面板指示灯调到适当的亮度,将音量调到适当的位置,置于 静默状态进行正常值守。 3.4.3当收到报警信号时,应立即报告船长并通知报务员打开收发信机在2128KHZ上进 行守听或进行话音联络。 3.4.4每月对设备进行一次试验检查,检查结果记入电台日志。
激光雷达原理、关键技术及应用的深度解析
激光雷达原理、关键技术及应用的深度解析 “雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等 特征参数。 传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波.可以用 振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。 激光雷达的种类目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: 按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。 按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。 按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。 按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、
地质雷达使用与操作2
地质雷达仪的操作与保养 0.0前言:作为近十余年来发展起来的地球物理高新技术方法,地质雷达以其分辨率高、定位准确、快速经济、灵活方便、剖面直观、实时图象显示等优点,备受广大工程技术人员的青睐。现已成功地应用于岩土工程勘察、工程质量无损检测、水文地质调查、矿产资源研究、生态环境检测、城市地下管网普查、文物及考古探测等众多领域,取得了显著的探测效果和社会经济效益,并在工程实践中不断完善和提高,在工程探测领域应用不断被拓宽。 就目前市场上而言,地质雷达厂家主要有加拿大ERROR,美国SIR系列,瑞典MALA,国产青岛中科院光电所等等,其设备主要部件都是操作平台,仪器主机,以及配套雷达三大块。目前国内各种地质雷达使用研发已相当成熟,不同厂家的仪器性能不断改善和优化。相信在以后工程实践中,地质雷达会应用越来越光,且越来越适应各类不同的现场条件。 我公司引进的是瑞典MALA公司生产的RAMAC/GPR地质雷达,现主要介绍该仪器的使用及其小知识。 首先仪器硬件部分,仪器操作平台为IBM笔记本电脑,分采集软件GROUND VISION和分析处理软件REFLAXW软件;雷达主机为同步采集系统和高频模块;雷达的发射和采集天线为集成天线,目前购置了1.2GHZ 屏蔽天线,500MHZ屏蔽天线,100MHZ屏蔽天线,50MHZ非屏蔽天线共四种。通过在不同的工作领域合理调配不同的天线,再辅以不同的辅助设备,(比如隧道中的脚架,提升车,公路上的拖车,水上物探上的木船,或者防水密闭管等等),使工作更便捷,应用效果更准确。 雷达的基本操作应当说比较傻瓜型,使用起来应该说比较容易上手,在实践中应当遵循《城市工程地球物理规范》等国家,行业标准,以及仪器本身操作指南,使测试工作安排,测线布置,采样方式,测试精度,测试效果,以及测试成果等等满足工程技术要求。 1.0 基础篇 一、软件安装 1、计算机开机时,首先进入 BIOS 设置(如IBM 按F1 进入,其它参阅计算机使用手册) 将并口设置为 ECP 方式,端口地址设为0378。 2、如果是 Windows XP 或2000 操作系统,应在控制面板中进入设备管理器,在并口属性中 的端口设置栏:筛选源方案选择“使用指派给此端口的任何中断”,并选择“使用即插 即拔设备”;在资源栏:输入/输出范围选“0378-037F” 3、使用软件安装光盘,点击“setup”进行安装,按照安装提示进行安装即可。 二、雷达操作使用
激光雷达回波信号仿真模拟
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
地质雷达操作规程
地质雷达法检测操作规程 1、地质雷达法适用范围 地质雷达法可用于地层划分、岩溶和不均匀体的探测、工程质量的检测,如检测衬砌厚度、衬砌背后的回填密实度和衬砌内部钢架、钢筋等分布,地下管线探查及隧道超前地质预报等。 2、地质雷达主机技术指标: (1)系统增益不低于150dB; (2)信噪比不低于60dB; (3)采样间隔一般不大于0.5ns、A/D模数转换不低于16位; (4)计时误差小于1ns; (5)具有点测与连续测量功能,连续测量时,扫描速率大于64次/秒; (6)具有可选的信号叠加、实时滤波、时窗、增益、点测与连续测量、手动与自动位置标记功能; (7)具有现场数据处理功能,实时检测与显示功能,具有多种可选方式和现场数据处理能力。 3、地质雷达应符合下列要求: (1)探测体的厚度大于天线有效波长的1/4,探测体的宽度或相邻被探测体可以分辨的最小间距大于探测天线有效波第一聂菲儿带半径。 (2)测线经过的表面相对平缓、无障碍、易于天线移动。 (3)避开高电导屏蔽层或大范围的金属构件。
4、地质雷达天线可采用不同频率的天线组合,技术指标为: (1)具有屏蔽功能; (2)最大探测深度应大于2m; (3)垂直分辨率应高于2cm。 5、现场检测 (1)测线布置 1、隧道施工过程中质量检测应以纵向布线为主,横向布线为辅。纵向布线的位置应在隧道的拱顶、左右拱腰、左右边墙和隧道底部各布置一条;横向布线可按检测内容和要求布设线距。一般情况线距8~12m;采用点测时每断面不少于6点。检测中发现不合格地段应加密测线或测点。 2、隧道竣工验收时质量检测应纵向布线,必要时可横向布线。纵向布线的位置应在隧道拱顶、左右拱腰和左右边墙各布一条;横向布线线距8~12m;采用点测时每断面不少于5个点。需确定回填空洞规模和范围时,应加密测线和测点。 3、三线隧道应在隧道拱顶部位增加2条测线。 4、测线每5~10m应有一历程标记。 (2)介质参数的标定: 检测前应对衬砌混凝土的介电常数或电磁波速做现场标定,且每座隧道不少于一处,每处实测不少于3次,取平均值为该隧道的介电常数或电磁波速。当隧道长度大于3km、衬砌材料或含水率变化较大时,应适当增加标定点数。
S4雷达应答器参数及操作指南.
S4雷达应答器技术指标 技术特点: ■ 发射功率:400mW(+26dBm) ■ 天线极化方式:水平极化方式 ■ 应用于各类船舶及救生艇 ■ 长达6年使用寿命的可置换电池 ■ 可选安装方法------内部/外部 ■ 有效天线高度:1米以上 ■ 声音或可视警报/内置式测试设备 ■ 已获得包括CCS在内的全球各大船级社及机构认可 标准配件:主机、支撑杆、安装座、配套螺丝、说明书 S4雷达应答器性能指标 频率范围9.2~9.5MHz 接收灵敏度优于-50dBm 扫描次数12 沿时响应时间小于0.5μs 射频功率(ERP)小于400mW 天线极化方式水平极化 有效天线高度大于1米
S4雷达应答器常规指标 电池容量守侯状态96小时连续响应状态8小时 电池寿命5年 重量360克(不带支撑杆和安装座) 510克(带支撑杆) 530克(带支撑杆和安装座) 尺寸(长*直径)264mm * 91mm 工作温度-20℃ +55℃ 储存温度-30℃ +65℃
S4结构尺寸图 S4安装座结构尺寸图 Mc Murdo S4 雷达应答器简易操作1、安装
将S4雷达谑浪笑傲器的安装支架固定在舱壁方便取用的地方。安装时要将S4圆顶向上,放进支架中。要取出时拉动支架上拉手即可松动取出S4。 2、自检测试 逆时针方向(向右旋转形状圈至“TEST”测试位置,且按住保持在此位置; 1如果该S4雷达应答器收到雷达信号时,S4机身底部的红灯将连续亮着,且每2秒钟发出“哔”的声音,表示本台S4通过自检。 2如果该S4雷达应答器没有收到雷达信号,S4机身底部的红灯每隔2秒闪烁一次,且无任何声音。 3测试完毕,松开开关圈退回至OFF位置即可。 注意:自检测试只能进行几秒钟,不能持续太长时间,以免为附近船只上的雷达侦测到信号引起误会。 3、遇险操作步骤 当船舶遇险时,从机身上拉断红色保险销,顺时针方向旋转开关环至标有“1”的ON位置即开始发射。拨掉黑色可伸缩支杆底部的像胶盖,拉出黑色支杆并拉出S4机身底产的系绳,将S4系在救生筏或救生艇适当的位置。 注意:S4安装位置需在雷达波来的扫描范围外且与罗经的安全距离至少1.5米。
c GSSI软件RADAN地质雷达处理步骤
地质雷达软件RADAN用户手册美国地球物理测量系统公司 美国劳雷工业公司 2010年10月
RADAN处理软件安装 安装采集软件RADAN66和RADAN5,并且激活采集软件 输入软件序列号serialnumber 输入处理软件产品ID代码:radan 计算获取软件激活码 Windows7系统安装radan5 安装radan程序,找到setup.exe鼠标右键要求以系统管理员身份运行; RADAN软件第一次运行要以系统管理员身份打开。 Windows7系统调整显示效果 选择控制面板->所有控制面板项->显示->更改配色方案->windows经典->高级,对话框如下: 选择颜色 项目->桌面->颜色->设置红绿蓝
资料整理 1打测量,布置网格和测线,数据采集 2数据拷贝与备份: 从地质雷达主机把数据复制在个人电脑上,并利用2种以上存储介质对原始数据进行备份。 3野外记录整理: 整理野外记录本(包括各种参数,利用数码相机或者扫描仪 对原始纪录扫描拍照,并制作成PDF格式文件便于日后随时查看野外现场原始资料),工作照片,收集的各种第三方资料(设计图纸、设计厚度、第三方检测资料),现场钻孔资料(里程桩号、芯样实物和照片、长度)。 利用钻孔资料反算电磁波传播速度或者材料介电常数。 4数据编辑与初步整理RADAN 5资料处理RADAN 6资料解释 7图片制作 8探测报告编写
IGSSI地质雷达探测资料处理流程图数据备份,资料整理,资料处理,资料解释
IIGSSI处理软件功能模块介绍 基本工具 打开数据文件,显示雷达数据剖面。 保存数据文件,保存雷达剖面。 选择数据块,选择目标数据剖面。 剪切数据块,切除多余数据剖面。 保存数据块,单独保存雷达数据剖面。 复制剖面图像至剪贴板,地质雷达剖面制作图片。 编辑数据文件头,输入相关参数:标记间隔、扫描数、介电常数、信号位置; 编辑标记信息、补充漏打的标记、删除多余标记信息。 线扫描显示方式、以灰阶图或者彩色图形式显示雷达剖面。 波形加变面积显示方式、以波列图形式显示雷达剖面。 线扫描+波形显示方式 波形显示方式,以波形方式显示雷达剖面,做频谱分析,显示雷达工作频段。 三维数据体显示 时间切片显示方式 多通道显示方式、多个雷达剖面做比对处理和信息显示。 交互式解释、进行地质解释,绘制地质剖面图、给出钢筋位置。 调整显示参数,设置各种显示参数,保存、调用显示参数文件,设置长标记。 打印雷达剖面 关于RADAN程序版本信息 命令参数按钮
关于“卫星示位标”和“搜救雷达应答器”
关于“卫星示位标”和“搜救雷达应答器” 为了保障海上人命安全,使海上遇险船舶能及时地获得有效救助,正确“报告”遇险船位和搜救船舶(人员)能尽快找到遇险船舶,便是能否“及时地获得有效救助”的关键。“卫星应急无线电示位标”和“搜救雷达应答器”正是在这种需求下产生的,它为海上人命安全增加了一道防线,也历来是港口国检查的严控项目。 大家知道:对于船舶来说,这两种设备是“备而不用”,但又必须是“备而能用”。我们平时的检查、测试就是要确保它真要使用时能正常工作,港口国检查把它列为严控项目也是基于这个原因。可惜,由于部分管理人员因不熟悉或没有熟练掌握检查、测试的要领,常发生一些不该发生的“故障”。 一、卫星应急无线电示位标 卫星应急无线电示位标(Satellite emergency position-indicating radio beacon,简称Satellite EPIRB或“EPIRB”)。目前,我司船舶配备的示位标通常有二种,现介绍如下: 1.KANNAD-406示位标 法国生产的KANNAD-406示位标目前被船舶普遍采用,它是一个柱形的漂浮体,分为上下两部分,上部内装406MHZ与121.5/243MHZ发射机及天线,下部内装锂电池和磁性开关,顶部有电源开关和指示灯,平时卧放在外壳容器内。 1)启动方法 A.人工启动:将示位标从容器内取出,示位标即开始工作:红灯闪亮,发射121.5/243MHZ信号,30秒后,发射406MHZ信号。然后以50秒为一周期重复发射,其中48秒发射121.5/243MHZ信号,后2秒内发射0.5秒406MHZ信号。
B.自动启动:当船舶突然下沉时,水位高过示位标达1.5-4米时,外壳上的释放器工作,自动打开容器盖,使示位标自动漂浮,并开始发射。(发射程式同“A”) 2)自检 A.检查外壳是否损坏,固定是否牢固,放置处周围不应有障碍物;是否能保持水密(船舶遇大风和暴雨袭击后,应立即检查示位标是否完好和受水浸)。 B.打开释放器的U型销扣,一手按住示位标,一手慢慢打开盖板,旋开开关保护盖,把示位标从容器内稍微抬起,置电源开关于OFF位置,然后取出示位标。 C.把开关放在ON位置: 指示灯闪亮,4秒后,指示灯连闪(此时应为发射121.5/243MHZ信号),连闪不得超过30秒,即把开关放到OFF。 D.自检结束,把示位标体标有“THIS SIDE UP”向上,把示位标天线自然弯曲向容器底部,然后把示位标卧放在容器内,然后把开关放到ON位置上,旋上保护盖。检查磁铁的磁性和磁性开关(没有磁性则磁性开关接通,引起误报警,在这种情况下,必须将外壳换新)。 E.检查释放器和电池的有效期。检查释放器、电池有效期的日期是否清晰可辨(电池为4年更换,释放器为2年更换),在到期前三个月向主管部门申请备件更换。 F.关上容器盖并装好释放器边上U型销扣。 2.TRON-30S卫星示位标 NORWAY生产的TRON-30S应急无线电示位标,主要由两部分组成。上半部为电子电路及天线,下半部为电池、水银开关和水敏开关。两个部分之间用园