优化设计作业题目(全)
作业
1. 阐述优化设计数学模型的三要素。写出一般形式的数学模型。
2. 阐述设计可行域和不可行域的基本概念
3、无约束局部最优解的必要条件?
4. 阐述约束优化问题最优解的K-T 条件。
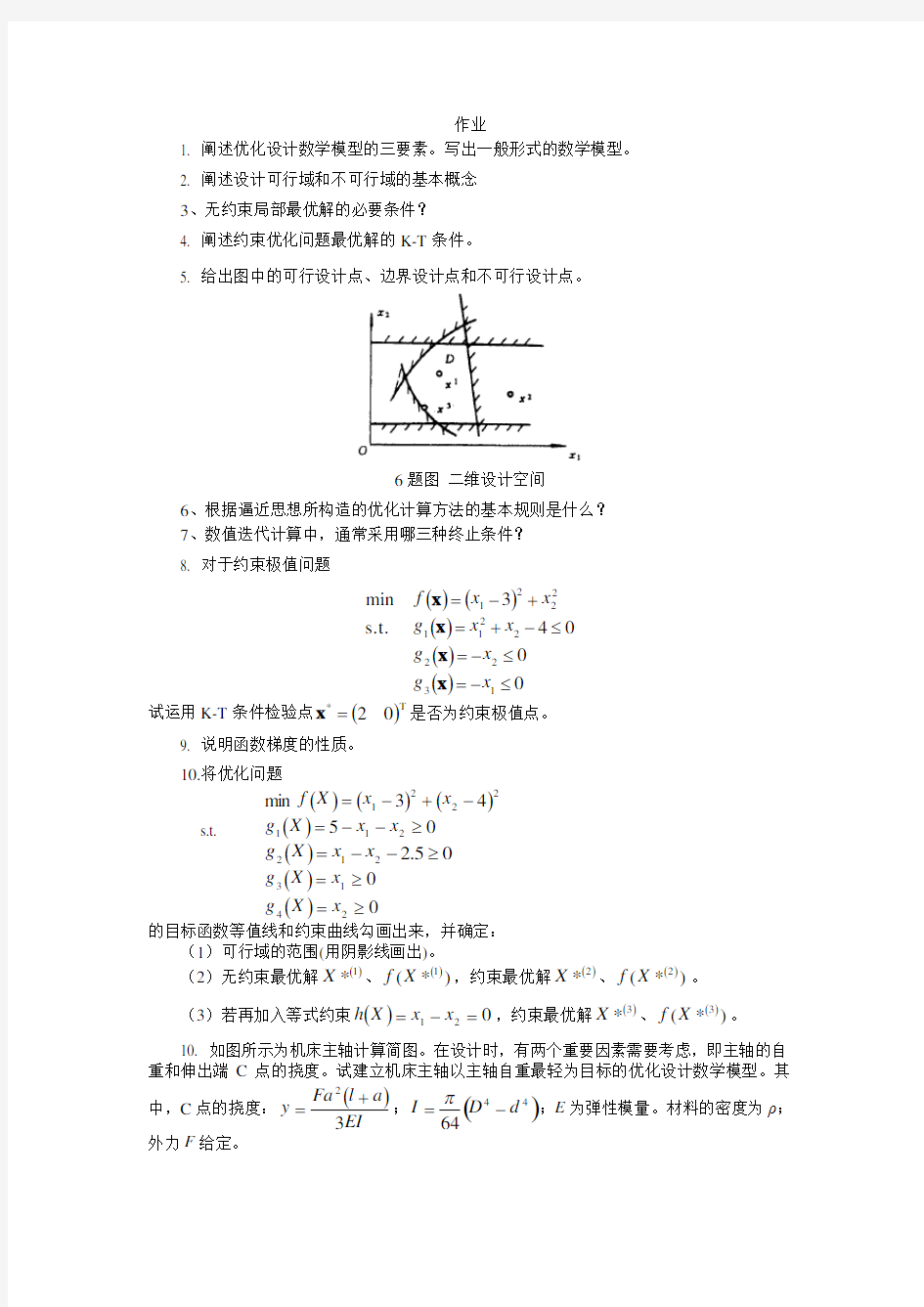
5. 给出图中的可行设计点、边界设计点和不可行设计点。
6题图 二维设计空间
6、根据逼近思想所构造的优化计算方法的基本规则是什么?
7、数值迭代计算中,通常采用哪三种终止条件?
8. 对于约束极值问题
()()()()()0
04s.t.
3min 1322221122
21≤-=≤-=≤-+=+-=x g x g x x g x x f x x x x 试运用K-T 条件检验点()T *02=x 是否为约束极值点。
9. 说明函数梯度的性质。
10.将优化问题
()()()2
22143min -+-=x x X f ()05211≥--=x x X g
()05.2212≥--=x x X g
()013≥=x X g
()024≥=x X g
的目标函数等值线和约束曲线勾画出来,并确定:
(1)可行域的范围(用阴影线画出)。
(2)无约束最优解()1*X 、())*(1X f ,约束最优解()2*X 、())*(2X f 。
(3)若再加入等式约束()021=-=x x X h ,约束最优解()3*X 、())*(3X f 。
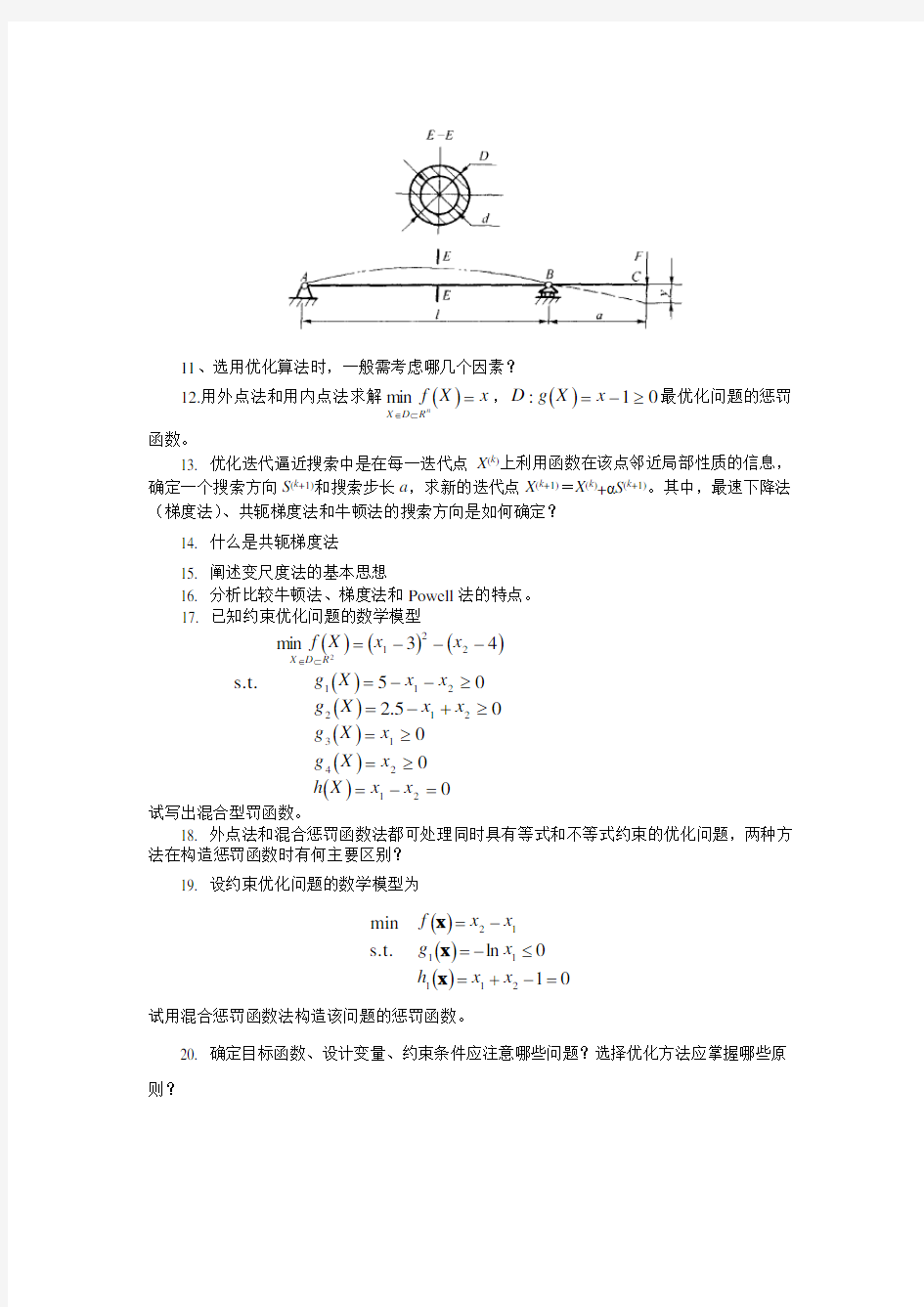
10. 如图所示为机床主轴计算简图。在设计时,有两个重要因素需要考虑,即主轴的自重和伸出端C 点的挠度。试建立机床主轴以主轴自重最轻为目标的优化设计数学模型。其
中,C 点的挠度:()EI a l Fa y 32+=;()
4464d D I -=π;E 为弹性模量。材料的密度为ρ;外力F 给定。
s.t.
11、选用优化算法时,一般需考虑哪几个因素?
12.用外点法和用内点法求解()x X f n
R D X =?∈m in ,()01:≥-=x X g D 最优化问题的惩罚
函数。
13. 优化迭代逼近搜索中是在每一迭代点X (k )上利用函数在该点邻近局部性质的信息,确定一个搜索方向S (k +1)和搜索步长a ,求新的迭代点X (k +1)=X (k )+αS (k +1)。其中,最速下降法(梯度法)、共轭梯度法和牛顿法的搜索方向是如何确定?
14. 什么是共轭梯度法
15. 阐述变尺度法的基本思想
16. 分析比较牛顿法、梯度法和Powell 法的特点。
17. 已知约束优化问题的数学模型
()()()43min 22
12
---=?∈x x X f R D X s.t. ()05211≥--=x x X g
()05.2212≥+-=x x X g
()013≥=x X g
()024≥=x X g
()021=-=x x X h
试写出混合型罚函数。
18. 外点法和混合惩罚函数法都可处理同时具有等式和不等式约束的优化问题,两种方法在构造惩罚函数时有何主要区别?
19. 设约束优化问题的数学模型为
()()()0
10ln s.t.min
211111
2=-+=≤-=-=x x h x g x x f x x x
试用混合惩罚函数法构造该问题的惩罚函数。
20. 确定目标函数、设计变量、约束条件应注意哪些问题?选择优化方法应掌握哪些原则?
基于matlab的齿轮优化设计说明书
机械装备优化设计三级项目题目:基于MATLAB的齿轮优化设计的优化设计班级:12级机械装备二班 设计人员:王守东(120101010236) 荆雪松(120101010215) 武吉祥(120101010219)
一、优化设计问题分析: 所谓优化就是在处理各种事物的一切可能的方案中寻求最优的方案。机械优化设计是把优化理论和技术应用到机械设计中,通过对机械零件、机构乃至整个机械系统的优化设计,使其中某些设计参数和指标获得最优值。绝对的最优,只有在某些理论计算中才能达到,但对于实际的机械优化设计,都带有一定的客观性和相对性。 Matlab 是美国 Mathworks 公司于1967年推出的用于科学计算的可视化软件包。其方便、友好的用户环境、强大的扩展能力使许多领域的科学计算和工程应用节省时间、降低成本和提高效率。 许多机械工程设计都需要进行优化。优化过程可以分为三个部分:综合与分析、评价、改变参数三部分组成。其中,综合与分析部分的主要功能是建立产品设计参数与设计性能、设计要求之间的关系,这也就是一个建立数学模型的过程。评价部分就是对该产品的性能和设计要求进行分析,这就相当于是评价目标函数是否得到改善或者达到最优,也就是检验数学模型中的约束条件是否全部得到满足。改变参数部分就是选择优化方法,使得目标函数(数学模型)得到解,同时根据这种优化方法来改变设计参数 二、优化设计方案选择: 机械设计优化设计中常采用的优化设计方法有进退法、黄金分割法、共轭梯度法、坐标轮换法、复合形法等。下面设计一种齿轮系统,并基于Matlab对系统进行优化设计。 高速重载齿轮时常会受到加速度大、冲击载荷大、启动、制动等
优化设计作业
作业 1. 阐述优化设计数学模型的三要素。写出一般形式的数学模型。 答:建立最优化问题数学模型的三要素: (1)决策变量和参数。决策变量是由数学模型的解确定的未知数。参数表示系统的控制 变量,有确定性的也有随机性的。 (2)约束或限制条件。 由于现实系统的客观物质条件限制,模型必须包括把决策变量限制在它们可行值之内的 约束条件,而这通常是用约束的数学函数形式来表示的。 (3)目标函数。 这是作为系统决策变量的一个数学函数来衡量系统的效率,即系统追求的目标。 2. 阐述设计可行域和不可行域的基本概念 答:约束对设计点在设计空间的活动范围有所限制。凡满足所有约束条件的设计点,它在设 计空间中的可能活动范围,称可行设计区域(可行域)。不能满足所有约束条件的设计空间便 是不可行设计区域(不可行域)。 3、无约束局部最优解的必要条件? 答: (1)一元函数(即单变量函数) 极值点存在的必要条件 如果函数f (x )的一阶导数f’(x )存在的话,则欲使x *为极值点的必要条件为: f’(x *)=0 但使f’(x *)=0的点并不一定部是极值点;使函数f (x )的一阶导数f’(x )=0的点称为函数f (x ) 的驻点;极值点(对存在导数的函数)必为驻点,但驻点不一定是极值点。至于驻点是否为极 值点可以通过二阶导数f’’(x )=0来判断。 (2)n 元函数在定义域内极值点X *存在的必要条件为 即对每一个变量的一阶偏导数值必须为零,或者说梯度为零(n 维零向量)。 ▽f (X*)=0是多元函数极值点存在的必要条件,而并非充分条件;满足▽f (X*)=0的 点X *称为驻点,至于驻点是否为极值点,尚须通过二阶偏导数矩阵来判断。 3. 阐述约束优化问题最优解的K-T 条件。 答:K-T 条件可阐述为: 如果X (k)是一个局部极小点,则该点的目标函数梯度▽f (X (k))可表示成该点诸约束面梯度为▽ g u (X (k))、▽h v (X (k))的如下线性组合: ()()()()0****21=????????????=?T n x X f x X f x X f X f
优化设计试卷练习及答案
-- 一、填空题 1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。 2.函数()22121212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ????,海赛矩阵 为2442-????-?? 3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要求是能用 来评价设计的优劣,,同时必须是设计变量的可计算函数 。 4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。 5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。 6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步 长按一定的比例 递增的方法。 7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯 度法,其收敛速度较 慢 。 8.二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩 阵正定 9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无 约束优化问题,这种方法又被称为 升维 法。 10改变复合形形状的搜索方法主要有反射,扩张,收缩,压缩 11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题 12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。 13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。 14.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长 15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。 16.机械优化设计的一般过程中, 建立优化设计数学模型 是首要和关键的一步,它是取得正确结果的前提。 二、名词解释 1.凸规划 对于约束优化问题 ()min f X ..s t ()0j g X ≤ (1,2,3,,)j m =??? 若()f X 、()j g X (1,2,3,,)j m =???都为凸函数,则称此问题为凸规划。 2.可行搜索方向 是指当设计点沿该方向作微量移动时,目标函数值下降,且不会越出可行域。 3.设计空间:n个设计变量为坐标所组成的实空间,它是所有设计方案的组合 4..可靠度 5.收敛性 是指某种迭代程序产生的序列(){}0,1,k X k =???收敛于1lim k k X X +*→∞ = 6.非劣解:是指若有m 个目标()()1,2,i f X i m =???,当要求m-1个目标函数值不变坏时,找不到一个X,使得另一个目标函数值()i f X 比()i f X *,则将此X *为非劣解。 7. 黄金分割法:是指将一线段分成两段的方法,使整段长与较长段的长度比值等于较长段与较短段长度的比值。 8.可行域:满足所有约束条件的设计点,它在设计空间中的活动范围称作可行域。 9.维修度 略 三、简答题 1.什么是内点惩罚函数法?什么是外点惩罚函数法?他们适用的优化问题是什么?在构造惩罚函数时,内点惩罚函数法和外点惩罚函数法的惩罚因子的选取有何不同?
浅谈小学音乐作业的优化设计
浅谈小学音乐作业的优化设计 【摘要】随着新课标课程改革的不断推进,教学越来越注重素质教育,培养学生各方面的能力素质。小学音乐是小学素质教育的重要组成部分,对学生综合素质的提高具有重要意义。因此,小学音乐教师要创新教学模式,优化小学音乐作业设计,提升课堂教学效率。 【关键词】优化作业设计;小学音乐;课堂效率 复习对于巩固知识,获得新知具有重要意义。作业是复习的一种重要方式。做作业帮助学生了解所学到的知识并掌握学情,让教师对学生的学习情况有具体的了解。小学音乐的作业设计对于提高学生的音乐感悟能力和创作能力具有重要作用。因此,小学音乐教师要优化小学音乐作业设计,提升课堂教学效率。 一、注重层次性 音乐作为一门才艺性的学科,测评学生学习的成果是根据学生的才艺表现来决定的。才艺水平的高低需要教师对学生进行不同层次的教导,并让学生进行不同层次的训练。因此,小学音乐教师在进行音乐作业设计时,要注重作业设计的层次性。作业设计的层次性分为三个方面:基础练习、经典音乐鉴赏、音乐创作。教师在进行基础练习的音乐作业设
计时只需根据音乐大纲教学要求,给学生设计一些相应的音乐练习,让学生通过基础练习巩固课堂内容,提高学习效率。例如:一年级的学生在学完《两只老虎》《新年快乐》等儿歌后,教师可以让学生回家给父母反复演唱,让家长监督学生完成基础训练,并帮孩子录音,这样可以提高作业的趣味性,缓解学生的学习压力,让学生在轻松活跃的环境下巩固课堂知识。这个过程可以拉近家长与孩子的距离,让家长了解学生的音乐掌握情况,并发现孩子兴趣。 基础练习仅是对音乐基础知识的巩固,若要提高学生的音乐素养,还需让学生学会对经典音乐作品鉴赏。经典音乐作品对学生学习音乐以及开发学生的音乐潜能具有重要意义,在经典音乐作品潜移默化的熏陶下,学生的音乐创作灵感得到激发,对学习音乐的兴趣更加浓厚。教师给学生设计有关经典音乐作品鉴赏的家庭作业强化了学生的情感体验,学生从小接触高雅艺术也有利于培养学生的气质。音乐作业设计也要培养学生的音乐创作能力,因此教师在进行音乐作业设计时,要布置一些创作音乐的作业。随着经济的迅速发展,教育越来越受到人们的重视。很多家长为孩子报了音乐第二课堂,让学生学习自己感兴趣的乐器,因此教师布置创作型音乐作业,学生可以利用自己在第二课堂学习的乐器进行音乐创作,真正实现学以致用的教学理念。 二、发挥表现性
测量控制网优化设计的可靠性准则法
第33卷第2期 测绘科学 VoL33No.2 2008年3月 ScienceofSurveyingandMapping Mar. 测量控制网优化设计的可靠性准则法 张正禄①②,邓勇①。罗长林①,杨奇儒③ (①武汉大学测绘科学与技术学院,武汉430079;②武汉大学测绘遥感信息工程国家重点实验室,武汉430079; ③河南平顶山市国土资源局,河南平顶山467000) 【摘要】测量控制网优化设计与网的精度、可靠性、灵敏度以及费用等准则有关,但这些准则之间的关系又十分密切,本文提出了一种基于观测值内部可靠性指标的测量控制网模拟法优化设计新方法,介绍了其原理和特点,并用实例说明了用该方法的计算步骤和优化效益。 【关键词】测量控制网;优化设计;可靠性;多余观测分量【中图分类号】P258;P21【文献标识码】A【文章编号】1009-2307(2008)02-0023-03 DoI:10.3771/j.issn.1009-2307.2008.02.008 1引言 2 ri的计算及性质 测量控制网的优化设计有解析法和模拟法两种,它们都要依赖计算机程序作大量计算。解析法是以最优化理论为基础的严密方法,其数学模型一般表示为 臻离0 c 10, 妒(x)≥ } ()哕(X)= J 第一式称目标函数,第二、三式称约束条件。目标函数可以是精度、可靠性、灵敏度或费用等指标,约束条件也可以是上述指标。其实质是在给定的约束条件下通过求目标函数的极值求最优解。在实际中要对优化的观测方案进行调整,故解析法的结果不是最优的。研制通用的解析法优化设计软件的难度较大,对解析法的研究很多,但应用很少。 模拟法是一种试算法。一般是根据优化的任务和设计者的经验,制定初始设计方案,用模拟观测值作平差计算分析,通过计算、修改、再计算、再修改,直到满意为止。模拟法的缺点是依赖于设计者的知识和经验,不同人的优本文提出了一种基于观测值内部可靠性指标的测量控制网的模拟优化设计方法。采用该方法,只需一个量化的可靠性指标,优化结果不以人的知识和经验为转移,具有一致性和严密性,在控制网数据处理通用软件包中增加一个优化设计模块即可应用。值得说明的是,本文提出的方法既适合地面边角网,也适合GPS网,GPS基线向量可看成是投影到与某一参考椭球面相应的高斯平面上的一条边,其长度和方向都可得到,因此,可将GPS网看成是观测了边长和方向的平面网。 作者简介:张正禄(1944-),男,四川省渠县人,工学博士,武汉大学测绘学院教授,博士生导师,主要从事精密工程测量、变形监测分析与预报、测量数据处理和工程信息系统方面的科研和教学工作。 E.mail:zzl623@wtusm.edu.cn 收稿日期:2007-05.17 基金项目:国家重点基础研究发展计划(973计划)项目(2003CB716705) 网的可靠性可分网的总体可靠性,观测值的内部可靠 性(也称局部可靠性)和外部可靠性。在此,主要讨论观测值的内部可靠性。 对于一个测量控制网来说,由其间接观测平差模型(z,Ax,口。2p一)可得观测值t的多余观测分量rj(又称内部可靠性)‘¨: ri=(Q。P)d (2) 且满足 ∑r;=r=n—t (3) 式中,Q。为观测值改正数的协因数阵,P为观测值的 权阵。观测值ff能被发现的粗差下界值V。ff为: v。丘=业/--- (4) √Fi 其中,‰为非中心参数,其取值与显著水平Ot和检验功效’,有关,常取2.79(a=0.05,',=0.80)或4.13(Ot=0.001,y=0.80)晗]。叽为观测值ff中误差,r;又称为观测值屯的多余观测分量,rf愈大,V。t愈小,发现观测值中粗差的能力愈强。观测值相互独立(本文只讨论这种情况)时。有 I"i:I一10"i (5) 口£ 上式中Z为z。的平差值的方差。观测值的内部可靠性 L具有以下性质: I)0≤ri≤I:‘愈小,该观测值在网中的地位愈高,若^等于零,则该观测值为已知值;愈大,该观测值在网中的地位愈低,若‘等于I,表示对已知的量进行了观测,须删除。 2)rf愈小,该观测值能被发现的粗差下界值V。ff愈 大,rf愈大,观测值能被发现的粗差下界值V。t愈小;粗差下界值V。ff对平差结果的影响随rf的增大而减小。 3)对于一个确定的网和设计方案,即在网形、观测值数和精度确定的情况下,观测值的精度愈高,则r{愈小,观测值的精度愈低,则rf愈大,即观测值的内部可靠性与观测值的精度成反比。 4)在确定的观测精度情况下,网的多余观测数愈多,则rf愈大,建网费用愈高。 5)对于独立网来说,ri是与基准的位置无关的不变量。设控制网的网点数为m,已知点数为m。,未知点数为 m。,已知边和已知方位角数分别为屯和_|}。.有方向观测的 万方数据
YJK软件的优化设计
Y J K软件的优化设计Prepared on 21 November 2021
一、当前软件(PKPM)主要问题 1、计算模型落后甚至不正确的若干方面 2、采用的算法不完全满足规范要求的若干方面 3、采用的过于简化的计算模型的若干方面 4、设计观念已经落后的若干方面 5、计算模型粗放忽略了结构有利要素的若干方面 6、涉及优化的关键环节缺失的若干方面 7、不开放接口的封闭观念 1、计算模型落后甚至不正确的若干方面 (1)基础筏板、桩筏或桩承台有限元计算常给出配筋异常大的结果(2)楼板按照单房间的导致支座钢筋偏大; (3)基础冲切计算流程错误导致筏板承台厚度过大; (4)承台独基与地基梁的重复计算造成重复布置 2、采用的算法不完全满足规范要求的若干方面 (1)剪力墙边缘构件配筋的单肢配筋方式配筋过大或不够; (2)柱剪跨比按简化计算方法常导致短柱过多超限过多; (3)型钢混凝土柱的配筋按不同规程才可优化 3、采用的过于简化的计算模型的若干方面 (1)对弹性时程分析结果只能作全楼统一的地震作用放大; (2)对活荷载的折减系数、重力荷载代表值系数只能设置全楼统一的数值; (3)施工模拟计算不能胜任目前多种工程需要; (4)转换梁按照梁杆件计算模型导致易发生抗剪抗弯超限; (5)地下室外墙的计算模型不合理导致地下室外墙过大的配 筋设计; (6)基础考虑上部楼层刚度的计算不全面; 4、设计观念已经落后的若干方面 认为梁设计时考虑楼板的壳元计算减少梁的配筋偏于不安全 5、计算模型粗放忽略了结构有利要素的若干方面 (1)地下1层以下地下室的不需按抗震设计; (2)梁配筋计算没有考虑支承梁的柱的宽度影响; (3)应正确区分框架梁与非框架梁; 6、涉及优化的关键环节缺失的若干方面 (1)基础承载力验算;
南阳市城市地下水监测网优化设计
南阳市城市地下水监测网优化设计 韩建秀,张春亿 (河南省南阳市节水办公室,河南南阳473060) [摘 要] 深入研究了河南省南阳市城市地下水系统,分析了现状地下水监测工作存在的问题,全面系统、经济合理、科学地设计了南阳市城市地下水监测体系,加强对城区段白河水文要素的监测,满足监控地下水资源质和量的变化及研究需要,为合理开发利用和保护地下水资源,保障城市饮水安全服务。 [关键词] 地下水系统;监测网;优化设计 [中图分类号] P 641.25 [文献标识码] A [文章编号] 1004 1184(2007)01010204 [收稿日期] 20061018 [作者简介] 韩建秀(1966),男,河南新野人,高级工程师,主要从事水资源、节水研究与管理工作。 Optimized Design of the Monitoring Network of Groundwater at the Urban Area of Nanyang City Han Jian xiu ,Zhang C hun yi (Water Sav ing Office o f Nany ang City in Henan Prov ince,Nany ang ,473060,China) Abstract :This paper tho roughly studies the g roundw ater sy stem in the urban area of Nanyang city ,analy zes the existed problems dur ing the m onitor ing w o rk for g roundw ater at pr esent,w holly and systematically ,economically and scientifically designs a m onitoring system for g roundwater in the urban area of Nanyang city.It enhances monito ring key influenced factors of Baihe river w ater and satisfies some requir em ents how to m onitor and r esearch variations betw een quality and quantity of g roundw ater resources and services for reasonable ex ploitation ,utilizatio n and pro tection of g roundw ater resources tog ether w ith how to ensure safely drinking w ater fo r the city. Key words :groundw ater sy stem ;the m onitor ing netw ork ;optimized design 一个优化的地下水监测网是获取地下水状态变量信息的最有效途径,通过监测,可以评价地下水系统与环境之间的相互作用过程,分析环境改变所导致地下水水量和水质以及地下水反作用于环境的变化结果,及时调整开发方案,实施治理保护措施,使地下水资源的开发利用具有可持续性。 南阳市城区以地下水为供水水源,随着城市规模扩大、地下水开采位置、规模、层位变化,以及白河三级橡胶坝建成蓄水后水环境条件改变,需要对现状地下水监测网进行优化和完善。 1 地下水系统分析 南阳市城市地下水分为4个含水系统。1.1 浅层地下水 分东部平原区浅层地下水含水系统和西部岗区 浅层地下水含水系统。 岗区浅层地下水含水系统:分布于焦枝铁路以西的岗区,由中更新统垂直节理发育的冲洪积粘土层组成,属贫水区。地下水以垂直交替运动为主,径流条件较差。 平原区浅层地下水含水系统:分布于城市东部白河一、二级阶地,由全新统、上更新统冲洪积层及中更新统冲洪积层组成,地下水补给径流条件较好。地下水主要接收白河侧渗和大气降水入渗补给,2004年两项补给量分别为1537万m 3和4141万m 3,排泄以开采为主。2004年该含水系统的开采量达到7074万 m 3 ,占城市地下水开采总量的81.68%,是城市主要供水水源地。目前,该含水系统在白河左、右岸已形成面积为35.09km 2和53.01km 2的地下水位下降漏 斗,其中左岸漏斗中心为一般超采区,面积5.5km 2 。 102 2007年1月 第29卷 第1期 地下水Gr ound w ater Jan.,2007V ol.29 N O.1
旅游线路的优化设计
2011年第八届苏北数学建模联赛 承诺书 我们仔细阅读了第八届苏北数学建模联赛的竞赛规则。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与本队以外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们愿意承担由此引起的一切后果。 我们的参赛报名号为: 3979 参赛组别(研究生或本科或专科): 本科组 参赛队员 (签名) : 队员1: 队员2: 队员3: 获奖证书邮寄地址: 浙江省杭州市滨文路浙江中医药大学
编号专用页 参赛队伍的参赛号码:(请各个参赛队提前填写好): 3979 竞赛统一编号(由竞赛组委会送至评委团前编号): 竞赛评阅编号(由竞赛评委团评阅前进行编号):
题目旅游线路的优化设计 摘要 本文主要研究最佳旅游路线的设计问题。线路的设计主要受旅游费用、旅游时间、可游览景点数的制约。这三个因素只要有一个或两个确定,那么就能建立数学模型求出第三个因素的最优解,然后在满足相应约束条件下,设计出最佳旅游线路。 第一问是在时间不限,旅游景点数确定的条件下,设计出旅游费用最少的旅游线路。我们建立了一个最优规划模型,以最少的旅游费用游完十个景点为目标。先通过网络查出一个地点到其他十个地点的最便宜的交通费,再引入0-1变量表示游客是否在一个点住宿,从而推导出总旅游花费的函数表达式,给出相应的约束条件,使用lingo编程对模型求解。最佳路线:徐州→常州市恐龙园→黄山市黄山→舟山市普陀山→武汉市黄鹤楼→九江市庐山→洛阳市龙门石窟→西安市秦始皇兵马俑→祁县乔家大院→八达岭长城→青岛市崂山→徐州 第二问是在旅游费用不限的情况下,设计出以最少的时间游完十个景点的旅游路线。同样是建立一个最优规划模型,以最短时间游完十个景点为目标,先通过网络查出一个地点到其他十个地点最快捷的交通方式的时间,推导出总交通花费时间和在各景点的总停留时间的函数表达式,给出相应的约束条件,使用lingo编程对模型求解。最佳路线:徐州→常州市恐龙园→九江市庐山→武汉市黄鹤楼→西安市秦始皇兵马俑→祁县乔家大院→洛阳市龙门石窟→八达岭长城→青岛市崂山→舟山市普陀山→黄山市黄山→徐州 第三问是在旅游时间不限,以用2000元的旅游费用游览的景点数最多为目标。这里要引入0-1变量来判断游客是否游览某景点,再利用问题一建立的旅游费用模型,得
机械优化设计大作业2011 - 副本
宁波工程学院机械工程学院 机械优化设计大作业 班级 姓名 学号 教师
机械优化设计大作业 1.题目 行星减速器结构优化设计 NGW型行星减速器应用非常广泛。 1.1结构特点 (1)体积小、重量轻、结构紧凑、传递功率大、承载能力高; (2)传动效率高,工作高; (3)传动比大。 1.2用途和使用条件 某行星齿轮减速器主要用于石油钻采设备的减速,其高速轴转速为1300r/min;工作环境温度为-20℃~60℃,可正、反两向运转。 按该减速器最小体积准则,确定行星减速器的主要参数。 2.已知条件 传动比u=4.64,输入扭矩T=1175.4N.m,齿轮材料均选用38SiMnMo钢,表面淬火硬度HRC 45~55,行星轮个数为3。要求传动比相对误差02 ?u。 .0 ≤ 弹性影响系数Z E=189.8MPa1/2;载荷系数k=1.05; 齿轮接触疲劳强度极限[σ]H=1250MPa; 齿轮弯曲疲劳强度极限[σ]F=1000MPa; =2.97;应力校正系数Y Sa=1.52; 齿轮的齿形系数Y Fa 小齿轮齿数z取值范围17--25;模数m取值范围2—6。 注: 优化目标为太阳轮齿数、齿宽和模数,初始点[24,52,5]T
3.数学模型的建立 建立数学模型见图1,即用数学语言来描述最优化问题,模型中的数学关系式反映了最优化问题所要达到的目标和各种约 束条件。 3.1设计变量的确定 影响行星齿轮减速器体积的独立参数为中心轮齿数、齿宽、模数及行星齿轮的个数,将他们列为设计变量,即: x=[x 1 x 2 x 3 x 4 ]T=[z 1 b m c]T [1] 式中:z 1ˉ ̄ 太阳轮齿数;b―齿宽(mm);m—模数(mm);行星轮的个数。通常情况下,行星轮个数根据机构类型以事先选定,由已知条件c=3。这样,设计变量为: x=[x 1 x 2 x 3 ]T=[z 1 b m]T [1] 3.2目标函数的确定 为了方便,行星齿轮减速器的重量可取太阳轮和3个行星轮体积之和来代替,即: V=π/4(d 12+Cd 2 2)b 式中:d 1--太阳轮1的分度圆直径,mm;d 2 --行星轮2的分度圆 直径,mm。 将d 1=mz 1, d 2 =mz 2 ,z 2 =z 1 (u-2)/2代入(3)式整理,目标函数 则为: F(x)=0.19635m2z 1 2b[4+(u-2)2c][1] 式中u--减速器传动比;c--行星轮个数 由已知条件c=3,u=4.64,因此目标函数可简化为: F(x)=4.891x 32x 1 2x 2
09-10机械优化设计试卷期末考试及答案
第一、填空题 1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。 2.函数()2 2 121 212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ???? ,海赛矩阵 为2442-????-?? 3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要求是能用 来评价设计的优劣,,同时必须是设计变量的可计算函数 。 4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。 5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。 6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步 长按一定的比例 递增的方法。 7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯 度法,其收敛速度较 慢 。 8.二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩阵正定 9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无 约束优化问题,这种方法又被称为 升维 法。 10改变复合形形状的搜索方法主要有反射,扩张,收缩,压缩 11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题 12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。 13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。 14.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长 15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。
优化设计小论文
优化设计小论文
机械优化设计 优化设计是20世纪60年代初发展起来的一门新的学科,也是一项新的设计技术。它是将数学规划理论与计算技术应用于设计领域, 按照预定的设计目标,以电子计算机及计算程序作为设计手段,寻求最优设计方案的有关参数,从而获 得较好的技术经济效益。机械的研究和应用具有悠久的历史,它伴随甚至推动了人类社会和人类文明的发展。机构学研究源远流长, 但从古到今,机构学领域主要研究三个核心问题, 即机构的构型原理与新机构的发明创造、机构分析与设 计的运动学与动力学性能评价指标、根据性能评价指标分析和设计机构。机构 是组成机械的基本单元,一般机械都是由一个或多个机构组成。对于机构的研究, 能够为发明、创造新机械提供理论、资料和经验。而对于机构的优化设计, 使 机构具有确定的几何尺寸,能够满足运动学要求, 并能实现给定的运动规律,这 些能够为某些具体的机械设计, 使机械满足某些特定的功能提供了可靠的依 据。 机械设计是机械工程的重要组成部分,是决定机械性能最主要的因素。从 工程设计基础和目标上可将设计分为:新型设计(开发性设计)、继承设计、变 型设计(基于标准型的修改)。所谓新型设计,即应用成熟的科学技术或经过实 验证明可行的新技术,设计未曾有过的新型机械,主要包括功能设计和结构设计,是机械设计发展的方向所在,然而贯穿其中的关键环节即是设计的方法和 实现的手段。人类一直都在不断探索新方法和新设计理念。从17 世纪前形成的直觉设计过渡到经验设计和传统设计,直到目前的现代设计[1],从静态、经验、手工式的‘安全寿命可行设计’方法发展到动态、科学、计算机化、自动化的 优化设计方法,已将科学领域内的实用方法论应用于工程设计中了。 机械优化设计基本思路是在保证基本机械性能的基础上,借助计算机,应 用一些精度较高的力学/ 数学规划方法进行分析计算,让某项机械设计在规定 的各种设计限制条件下,优选设计参数,使某项或几项设计指标(外观、形状、结构、重量、成本、承载能力、动力特性等)获得最优值。
机械优化设计作业——梯度法求解
梯 度 法 求 最 优 解 问 题 姓 名:李刚 学号:2016210309 1、所求问题 用梯度法求目标函数121222125.05.1)(x x x x x x F --+=的无约束最优解,已知初始点 T X ]4,2[)0(-=,02.0=ε或002.0=ε 2、Matlab 编程实现 建立了一个Stair(e).m 的子函数来求解,e 为函数的输入变量,即问题中的ε。只需要在Matlab “命令行窗口”去调用此函数即可,用02.0=ε或002.0=ε去代替Stair(e).m 函数中的输入变量e 即可。 程序源码: function z =Stair(e) %输入变量e 来代替求解精度问题,方便求解不同静精度问题 syms x1 x2 a f=1.5*x1^2+0.5*x2^2-x1*x2-2*x1; %目标函数 dx1=diff(f,x1); %对x1求偏导 dx2=diff(f,x2); %对x2求偏导 g=[dx1,dx2]; %梯度 X=[x1,x2]; %建立坐标变量 X0=[-2,4]; %初始点坐标 g0=subs(g,X,X0); %subs 函数,用X0代替g 函数中的X G=norm(g0); %梯度的模 k=0; %迭代次数变量 F=subs(f,X,X0); %subs 函数,用X0代替f 函数中的X F=double(F); %数据类型转换 fprintf('迭代次数k=%d ;',k); fprintf('坐标值x1=%5.7f ',X0(1)); fprintf('x2=%5.7f ;',X0(2)); %fprintf('坐标值 X=%d %d\n',X0); fprintf('函数值F=%5.7f\n\n',F) for i=1:20 %迭代求解 if (G>e) %判断是否满足精度要求 k=k+1; d=-g0/G; %确定搜索方向
大学优化设计试卷期末考试及答案
一、填空题 1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。 2.函数()2 2 121 212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ???? ,海赛矩阵 为2442-????-?? 3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要求是能用 来评价设计的优劣,,同时必须是设计变量的可计算函数 。 4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。 5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。 6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步 长按一定的比例 递增的方法。 7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯 度法,其收敛速度较 慢 。 8.二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩阵正定 9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无 约束优化问题,这种方法又被称为 升维 法。 10改变复合形形状的搜索方法主要有反射,扩张,收缩,压缩 11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题 12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。 13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。 14.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长 15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。
110kV智能变电站监控系统优化设计
110kV智能变电站监控系统优化设计 摘要:本文对一体化监控系统功能定位以及系统硬件配置进行了介绍,并论述了一体化监控系统的高级应用,以及基于一体化信息平台技术在智能变电站监控系统中应用,并以某110kV智能变电站监控系统配置方案为例,对硬件整合后节约投资的经济性进行了分析。 关键词:智能变电站;监控系统;功能定位;硬件整合;节约投资; 0. 引言 近年来,随着电力系统管理体制的深化改革,变电所自动化技术在不断进步,目前很多变电站已逐步实现无人值守。国家电网公司正在加快全面推进智能电网建设,智能变电站是智能电网的重要环节,一体化监控系统是智能电网调度控制和生产管理的基础。 根据国家电网公司对智能变电站建设要求以及对智能变电站监控系统功能和建设技术规范要求,新建智能变电站监控系统宜采用一体化监控系统。 1. 一体化监控系统功能定位 智能变电站一体化监控系统按照全站信息数字化、通信平台网络化、信息共享标准化的要求,通过系统集成优化,实现全站信息统一接入、统一存储和统一展示,实现运行监视、操作与控制、信息综合分析与智能告警、运行管理和辅助应用等功能。 运行监视 通过可视化技术,实现对电网运行信息、保护信息、一、二次设备运行状态等进行监视和综合展示。包含三个方面: (1)运行工况监视 实现智能变电站全景数据统一存储和集中展示。提供统一的信息展示界面,综合展示电网运行状态、设备监测状态、辅助应用信息、事件信息、故障信息;实现装置压板状态的实时监视,当前定值区的定值及参数的召唤、显示。 (2)设备状态监测 实现一次设备运行状态在线监视和综合展示;通过可视化手段实现二次设备运行工况、站内网络状态和虚端子连接状态监视;实现辅助设备运行状态的综合展示。
小学生作业优化设计
小学生作业优化设计 作者:竺传新 (小学语文2010年湖南岳阳小学语文一班) 评论数/浏览数: 1 / 308 发 表日期: 2010-08-11 12:05:14 我们的课题,大家给点意见! 一 (一)问题的提出 如何以新课程标准为依据,设计新型作业,利用作业来关注学生的发展,现行大部分教师在作业设计和操作中存在以下几方面的不足:一是作业设计训练的目标单一,缺乏系统,多学科的整合,教师追求的是正确率。二是作业设计中的单向性,在作业训练中,教师出示给学生的作业题型都是课本(或教师)提供的,而不是学生自选的,缺乏多样化,对学生的能力培养是无所作为的。三是作业设计中的绝对性,这样的作业过于强调作业的甄别和选择功能,对作业质量的评价只是与标准答案比较对错,这就抹杀了学生的创造性,并造成学生思维的僵化。四是作业设计中完成的封闭性,这样的作业过于强调独立思考,从来不把合作当作一项必要的素质进行培养,唯一像合作的也仅限于偶尔的非组织形式的课堂讨论。 鉴于上述认识,我们开始对“小学生作业优化设计”进行探索,希望通过研究,使学生作业成为学生自主探究、合作学习的活动过程,成为培养学生良好学习习惯,提高学生自主学习能力的重要途径,通过研究,促使我校教师在提高课堂教学上下功夫,进一步推进课堂教学改革,通过研究切实减轻学生的课业负担,真正给学生以自主选择,自主发展的时间和空间。 (二)课题的界定 本研究所涉及的“作业”是教学过程中一个重要的环节,是教师在完成课堂教学后,为了使学生巩固、深化课堂教学内容,系统地理解、掌握知识体系,依托所学过的知识、技能达到提高能力的目的,让学生在课内或课后进行的练习。 本研究所涉及的“设计”,则是指对小学生作业的设计。具体地说,就是对小学生在课堂内外所需完成的作业,包括朗读、背诵、抄写、写作、计算、调查、收集、动手操作等口头、笔头练习的一种符合教学理念和规范的设计。“作业设计”就是指为了解决作业中的问题,根据作业本身的特点和新课程标准进行科学的规划,是教师备课的重要一环。可见,作业的设计又是一次创造的过程,好的作业设计,不仅可以巩固一堂课所要求掌握的知识,而且可以激发学习兴趣,开发智力,拓展知识面,点燃创造思维的火花,培养独立分析问题和解决问题的能力。 “作业优化设计”不是一种特定的作业形态,而是在新课程观念下,对常规作业模式的改革、突破和创新。它的设计可以由科任老师自行设计,也可以是各科老师相互协调、合作,它可以是学生自己设计,也可以是家长提出。 本课题旨在通过研究,使学生作业成为学生自主探究、合作学习的活动过程,成为培养学生良好学习习惯、提高学生自主学习能力的重要途径,同时也是减轻学生作业负担的重要途径。 (三)国内外研究的现状 西方一些教育先进国家的作业形式改革,对我们很有启发意义。英国小学生课程作业主要有四种类型:(1)实践作业。即指有教师指导的各种实验、独立观察、独立完成美术作品及各种动手能力的测试;(2)书面作业。即指客观性测试,其形式有简答题、抢答题、写随笔、调查报告等;(3)口头、听力作业;(4)表演作业。美国的小学教师是以很宽广的视野从多方面、多层次来定位课程作业目的的。教师不仅从课外作业与学生的知识掌握和能力培养的关系,而且从课外作业与学生个性发展的关系定位课外作业的目的。国内,特别是新课程标准实施后,有不少的教师进行过有关课外作业的设计研究,取得了一定的成效。虽然目前国内有一些学校和教师进行了设计新型课外作业形式的尝试,但只属于局部、零散的研究,尚没有形成一定的体系。教师和学生对待新型课外作业的态度又重新回到传统的作业态度观中,认为作业一定要
旅游线路的优化设计说明
旅游线路的优化设计 作者:
--------------- 日期:
承诺书 我们仔细阅读了第八届苏北数学建模联赛的竞赛规则。我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与本队以外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们愿意承担由此引起的一切后果。 我们的参赛报名号为: 参赛组别(研究生或本科或专科):本科 参赛队员(签名): 队员1 : 队员2 : 队员3: 获奖证书邮寄地址:
编号专用页 参赛队伍的参赛号码:(请各个参赛队提前填写好):竞赛统一编号(由竞赛组委会送至评委团前编号): 竞赛评阅编号(由竞赛评委团评阅前进行编号):
题目旅游线路的优化设计 摘要 本文主要研究最佳旅游路线的设计问题。在满足相关约束条件的情况下,花最少的钱游览尽可能多的景点是我们追求的目标。基于对此的研究,建立数学模型,设计出最佳的旅游路线。 第一问放松时间约束,要求游客游遍所有的景点,该问题也就成了典型的货郎担 (TSP)问题。使用lingo编程得到最佳旅游路线为:徐州一常州一舟山一黄山一庐山 —武汉黄鹤楼一龙门石窟一秦兵马俑一祁县乔家大院一八达岭长城一青岛崂山一徐州。 第二问给定时间约束,要求设计合适的旅游路线。我们建立了一个最优规划模 型,在给定游览景点个数的情况下以总费用不限,时间最少为目标。再引入0 —1变量表示是否游览某个景点,从而推出交通费用和景点花费的函数表达式,给出相应的约束条件,使用lingo编程对模型求解。推荐方案:徐州一恐龙园一舟山一黄山一庐山—黄鹤楼一秦兵马俑一龙门石窟一乔家大院一八达岭长城一青岛崂山一徐州。 第三问放松时间约束,要求游客在总费用低于2000元的约束下游览最多的景 点。在第一问的基础上建立模型,并增加总费用低于2000元的约束。使用lingo编 程得到最佳旅行路线为:徐州一常州一武汉一洛阳一西安一祁县一北京一青岛一徐州。 第四问给定时间约束,放松对总费用的约束。我们在第二问的基础上建立一个最 优化模型,以时间最少为目标。再引入0 —1变量表示是否游览某个景点,从而推出交通费用和景点花费的函数表达式,给出相应的约束条件,使用lingo编程对模型求 解。推荐方案:徐州-常州-九江-武汉-洛阳-西安-祁县-北京-徐州。 第五问给定时间、总费用小于2000的双重约束。我们在第三问、第四问的基础上建立模型,以在规定时间内,规定总费用内,以游览最多景点为目标。使用lin go 编程对模型求解。推荐方案:徐州-常州-舟山-黄山-九江-武汉-洛阳-西安-徐州 关键词:最佳路线TCP 问题景点个数最小费用
机械优化设计作业
机械优化设计作业 —工]+ 2 兀2 —4 * 2x}+3X2< 12 1 > min f= -4x1-x^ x{ -x2 <3 x^x2>0 在MATLAB下编程如下: * m 肝w|厂1 iLb h鼻「* j-f C L Q rrat VM电+ g ge? thi p irie-f v?irti ?mu : ?4 l-L 212 3.1 -I] >> b= K. I2;3j ; ?= L>: >> [-Kj fv3e 11 £laifj cmtptrl 1 - Lirt t Pg: Cfj Aj bj []>【1, Lbi Opt iviii ?Lori 1 a ranijn al Q dL 3E = 4? 2Q0D 1? 3000 f val ■ ?oono ex it-"fl a.z ― I ou t put = i■卷e-r -al i ons r 5 ■^1 g a r 11 t l-|JL £*L N E恵Q—NUEd 口!:X nt iiT L.口If pQHEt" c £it er al 1 atri ■; i: 0 " ' C^p't Ji H.L £at 1 □ A t wt BLilialt^id ca nc 1 rui a 1 at ion E0