第四章非线性规划5-可行方向法

第五节可行方向法(FDM )
可行方向法是用梯度去求解约束非线性最优化问题的一种有代表性的直接探索方法,也是求解大型约束优化设计问题的主要方法之一。其收敛速度快,效果较好,适用于大中型约
束最优化问题,但程序比较复杂。
可行方向法(Feasible Direction Method)是一种直接搜索方法,其搜索方向的获取利用了目标函数和约束函数的梯度信息。用目标函数的梯度可以得到目标函数值的下降方向,而利用约束函数的梯度则可以得到可行的搜索方向。因此,可行方向法的搜索方向实质上是既使
目标函数值下降,同时又可行的方向,即可行下降方向。满足这一条件的方法就称为可行方
向法。
一、基本原理
当求解目标函数的极小值
min f (X) X R n
s.t g u(X)M0 u =1,2,3川,m
当设计点X(k)处于起作用约束g i 上时,下降可行方向S必须同时满足条件:
S“g(X k)乞0
S^f (X k) ::0
由于于多数非线性规划的最优点都处在可行区的约束边界上或者几个约束边界的交点
上,因此最优搜索如能沿着约束边界附近进行,就有可能加速最优化搜索的进程。按照这一基本思路,在任意选定一初始点后到最后得到最优点必须解决三个问题:一是如何尽快使最优搜索从初始点到达约束边界
二是到达边界后怎样判断所找到的边界点是否是最优点;
三是如果边界点经判断不是最优点,那么下一步应如何进行最优搜索。
二、如何从初始点尽快到达边界
在任意选定初始点X0之后,首先判断X0是否为可行点,若是可行点,则选择目标函数的负梯度方向作为下一步的搜索方向。若是非可行点,则选择目标函数的梯度方
向为搜索方向。
搜索的步长可采用试探的方法逐步缩小,直到最后到达边界。
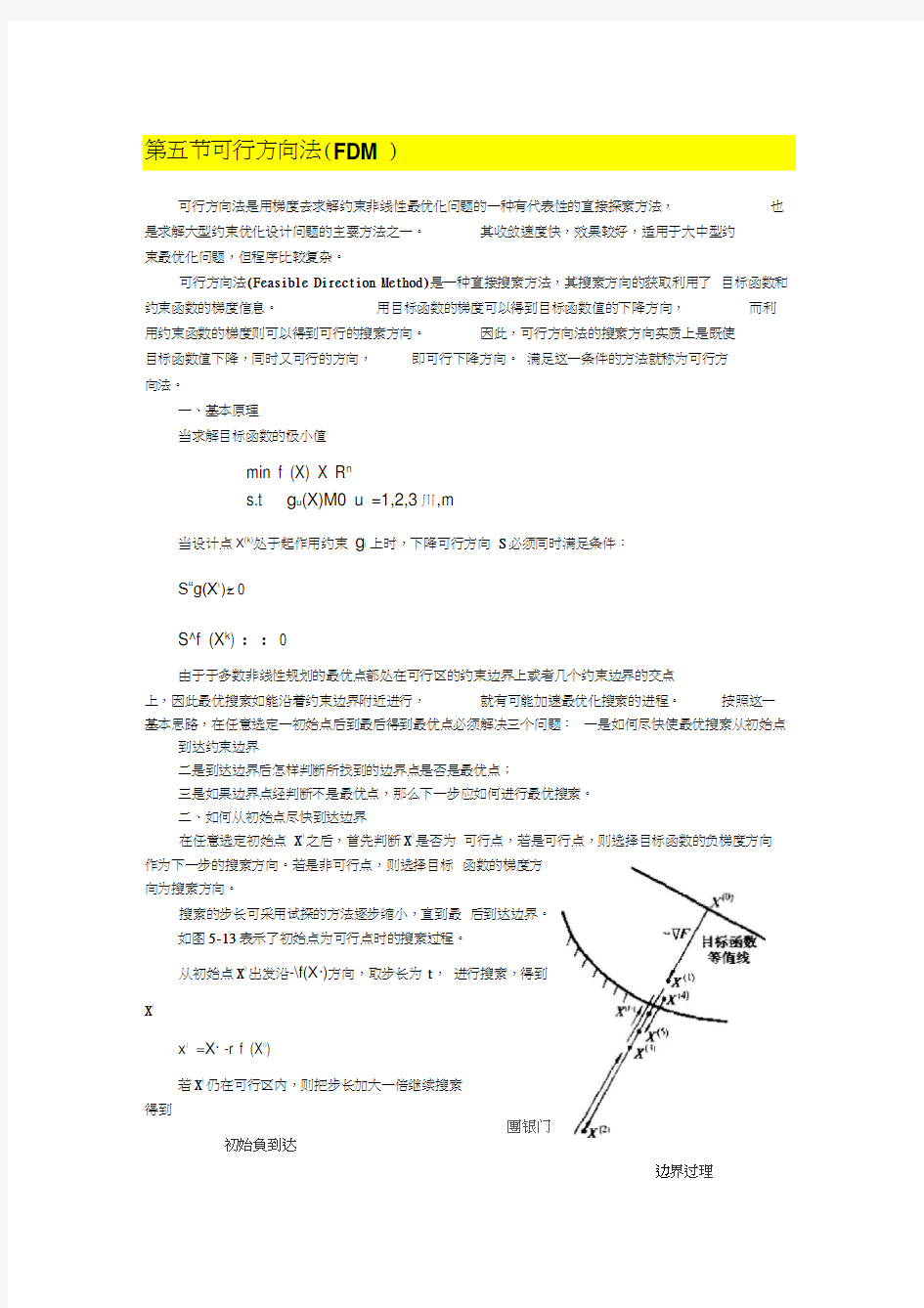
如图5-13表示了初始点为可行点时的搜索过程。
从初始点X0出发沿-\f(X°)方向,取步长为t,进行搜索,得到
X1
x1=X° -r f (X0)
若X1仍在可行区内,则把步长加大一倍继续搜索
得到
團银门
初始負到达
边界过理
X^X-2t\f(X1 2 3)
若X1仍在可行区内,则把步长再加大一倍继续搜索,如此方法得到新点只要仍在可行区内,则加大步长只到得到的点进入非可行区。
一旦进入非可行区后,即可改变方向,沿得到点的梯度方向进行搜索,此时步长为原步
长的一半进行搜索。
_ k k k 每次判断得到的点X是否属于可行区,若是则沿-Vf (X ),若否,则沿V f (X )方
向搜索,但是步长一直是前一个步长的一半,如此反复,只到收敛到边界上。
收敛到边界点的条件是,只要任一个约束函数为0:
k
g i(X )=0 (i=1,2,…..,m)
搜索过程中的两条原则:一是搜索方向由迭代点处于可行区还是非可行区而取负梯度方向或是梯度方向;二是搜索步长在第一次越过约束边界前步长是逐次增加的,而此后不管迭
代点是可行点还是非可行点都是逐次减小的。
这两条原则对于初始点为非可行点时也向样适用,即初始点X0为非可行点时,进入可
行区之前步长是每次加大的,一旦首次跨进可行区,则以后的步长每次都是缩小的。
三、到达边界后怎样判断所找到的边界点是否是最优点库恩-塔克条件:
」'F ni J'G n r C r 1 D ( D为补偿向量)
且令I G T D =0(零向量) (D与所有起作用约束正交)
通过求解D的值来判断。
1 若D=0 (零向量),且Ci>0时((i=1,2,3, , ,r)),则设计点为局部最优点,如果问题是凸规划,则为全局最优点;
2 若D丰0,则该点不是最优点。
3 若D=0 (零向量),但Ci>0不能满足,则将Ci<0对应的g i从、G中剔除,形
成新的v G之后再重新计算C和D,此时,必有D丰0。如图中的A点,当对应的g j剔除
后,A 点即变成了与B 点同类型的点,所以,必有 D 工0。另外,从A 到E 搜索过程中,约 束边界g1=0已经不是起作用的约束了。应当从
\ G 中剔除。
四、如果边界点经判断不是最优点,那么下一步应如何进行最优搜索。 当约束界面上的设计点经判断不符合
K-T 条件而为非最优点时,就必须继续进行最优
捏索,确定最优搜索方向。 方法的不同可以得到不同的搜索方向, 也就构成了不问的可行方
向法。
常用的有三种方法确定搜索方向:
k
k
1.由约束面上的X 点出发,沿可行下降方向作一维最优化探索,若所得新点 X 在
可行域内,则再沿 」、f(X k )方向作一维最优化探索;若所得新点不在可行域内,则应将它 移至约束面上再重复上述步骤。当
「f(X k ) _ ■:时,则停止迭代。
2?由点X k 出发,沿可行下降方向以最大步长从一个约束面到另一约束面,如此进行, 直至满足式库恩一塔克条件
用5-lf 叮仃力向怯的用盅睛性
S 选择过大.所得到的 X k 1点就会“越过”最优点 X *
,
3.沿着约束面进行探索,把补偿向量 D 的方向总是指向最优点而 不会背离最优点,所以沿这个方向 进行搜索有可能向最优点逼近。然 而,由于沿D 方向前进有可能进 入非可行区?因此沿 D 方向走一 步后,就应该沿if(X k )方向再回 到约束边界面上,得到新的界面 点,再判断其是否为最优点, 如此 反复,直到逼近最优点 E 满足预 定精度要求为止。在沿 D 的方向 进行最优搜索的过程中还必须解 决搜索步长确定这一问题。 从X k
D 的方向作为最优搜索方向。
E 5-16沿Q 方向搜索羽氏的确定 勺很索步怏过人4)搜察歩快过小
出发再沿D 的方向前进,如果步长
⑻
3
再沿if 回到可行区约束界面所得到的 x k 2点,其目标函数值不但不会下降,反面增大甚 S 选择过小,虽然最终收敛于最优点,但收敛速度慢、花费机时。
W 5-1/沿11=线性约東向探索时的容差占
至会猛增。如果
第四章 非线性规划1-约束极值问题
第四章 非线性规划 ???? ???? 无约束最优化问题线性规划约束最优化问题非线性规划 ?? ?凸规划约束最优化问题非凸规划 ?? ?直接解法约束最优化问题求解方法间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于这类方法可以选用有效的无约束优化方法,且易于处理同时具有不等式约束和等式约束的问题,因而在工程优化中得到了广泛的应用。 直接解法是在满足不等式约束的可行设汁区域内直接按索问题的约束最优解。 第一节 目标函数的约束极值问题 所谓约束优化设计问题的最优性条件.就是指在满足等式和不等式约束条件下,其目标函数值最小的点必须满足的条件,须注意的是,这只是对约束的局部最优解而言。 对于带有约束条件的目标函数,其求最优解的过程可归结为: 一、约束与方向的定义 一)起作用约束与松弛约束 对于一个不等式约束()0g X ≤来说,如果所讨论的设计点() k X 使该约束()0g X =(或 者说() k X 当时正处在该约束的边界上)时,则称这个约束是() k X 点的一个起作用约束或紧约 束,而其他满足()0g X <的约束称为松弛约束。
冗余约束 40g ≤ 当一个设计点同时有几个约束起作用时,即可定义起作用约束集合为 {}()()()|()0,1,2, ,k k u I X u g X u m === 其意义是对() k X 点此时所有起作用约束下标的集合。 二)冗余约束 如果一个不等式约束条件的约束面(即()0g X =)对可行域的大小不发生影 响,或是约束面不与可行域D 相交,即此约束称为冗余约束。 三)可行方向 可行方向:一个设计点()k X 在可行域内,沿某一个方向S 移动,仍可得到一个属于可行域的新点,则称该方向为可行方向。 1)设计点为自由点 设计点() k X 在可行域内是一个自由点,在各个方 向上都可以作出移动得到新点仍属于可行域,如图所示。 2)设计点为约束边界点 当设计点()k X 处于起作用约束i g 上时,它的移动就会受到可行性的限制。此时,()k X 点的可行方向S 必满足条件: ()0T k i S g X ?≤ (解释:()()cos ,()T k k T k i i i S g X S g X S g X ?=??,,()90T k i S g X ?≥?)) 当,()90T k i S g X ?=?时,方向S 是约束函数i g 在()k X 点处的切线方向,即()0T k i S g X ?=。 当某个设计点x 同时有几个约束起作用时(如
第四章 约束非线性规划
第四章 约束非线性规划 § 4.3 可行方向法 作者:黄希勇 2013.5.28 引入: 对于非线性规划问题,如果不存在约束,从任一个初始点 )0(x 出发,沿)(x f 的负梯度方向进行一维收索,便可求得目标函数的无约束极小值;而对有约束的极小化问题来说,除要使目标函数在每次迭代有所下降之外,还要注意解的可行性问题,为此,在求解约束非线性规划迭代法的设计中,应在每个迭代点)(k x 出构造一个可行下降方向 )(k d 。 引入:有效约束和可行下降方向的概念 考虑非线性规划 ?? ???=≥==m i x g l j x h t s x f i j .....2,10)(......2,10)(.) (min (4.3.1) 其中,)(),(),(x g x h x f i j 均为实值连续函数,且具有二阶连续偏导数。 设)0(x 是非线性规划的一个可行解。现考虑某一不等式约束条件 0)(≥x g i 满足它有两种可能:其一为0)(>x g i ,这时,点)0(x 不是处于由这一约束条件形成的可行域边界上,因而这一约束对)0(x 点的微小摄动不起限制作用,从而称这个约束条件是)0(x 点的不起作用约束(或无效约束);其二是0)(=x g i ,这时)0(x 点处于该约束条件形成的可行域边界上,
它对)0(x 的摄动起到了某种限制作用,故称这个约束是点的起作用约束(有效约束)。 显而易见,等式约束对所有可行点来说都是起作用约束。 1.1 D e f : 设可行域是非空集,D x ∈,若对某非零向量n R d ∈,存在0>δ,使对任意),0(δ∈t 均有D td x ∈+,则称d 为从x 出发的可行方向。 若非线性规划的某一可行点)0(x ,对该点的任一方向d 来说,若存在实数't ,使对任意 ]',0[t t ∈均有 )()()0()0(x f td x f <+ 就称方向d 为)0(x 点的一个下降方向。 如果方向d 既是)0(x 点的可行方向,又是这个点的下降方向,就称它是该点的可行下降方向。 Eg 4.4: 略 现考虑非线性规划(4.3.1)式,设)(k x 是它的一个可行解,但不是要求的极小点。为了求它的极小点或近似极小点,根据以前所说,应在)(k x 点的可行下降方向中选取某一方向)(k d ,并确定步长k t ,使 ???<+=++) ()() ()1() ()()1(k k k k k k x f x f d t x x (4.3.2) 若满足精度要求,迭代停止,)1(+k x 就是所要的点。否则,从)1(+k x 出发继续进行迭代,直到满足要求为止。上述方法称为可行方向法; 其特点是:迭代过程中采用的搜索方向为可行方向,所产生的迭代
第四章 数学规划模型
第四章 数学规划模型 【教学目的】:深刻理解线性规划,非线性规划,动态规划方法建模的基本特点,并能熟练建立一些实际问题的数学规划模型;熟练掌握用数学软件(Matlab ,Lindo ,Lingo 等)求解优化问题的方法。 【教学重点难点】: 教学重点:线性规划和非线性规划的基本概念和算法,解决数学规划问题的一般思路和 方法,线性规划模型、整数规划模型、非线性规划模型的构建及其Matlab 与Lingo 实现。 教学难点:区分线性规划模型和非线性模型适用的实际问题,以及何时采用线性模型, 何时采用非线性模型,线性模型与非线性模型的转化。 【课时安排】:10学时 【教学方法】:采用多媒体教学手段,配合实例教学法,通过对典型例题的讲解启发学生思维,并给与学生适当的课后思考讨论的时间,加深知识掌握的程度。安排一定课时的上机操作。 【教学内容】: 在众多实际问题中,常常要求决策(确定)一些可控制量的值,使得相关的量(目标)达到最佳(最大或最小)。这些问题就叫优化问题,通常需要建立规划模型进行求解。称这些可控制量为决策变量,相关的目标量为目标函数;一般情况下,决策变量x 的取值是受限制的,不妨记为x ∈Ω,Ω称为可行域,优化问题的数学模型可表示为 Max(或Min)f(x), x ∈Ω 一般情况下,x 是一个多元变量,f(x)为多元函数,可行域比较复杂,一般可用一组不等式组来表示,这样规划问题的一般形式为 () x Min f x . ()0,1,2,,i st g x i m ≤= 虽然,该问题属于多元函数极值问题,但变量个数和约束条件比较多,一般不能用微分法进行解决,而通过规划方法来求解;这里讨论的不是规划问题的具体算法,主要是讨论如何将一个实际问题建立优化模型,并利用优化软件包进行求解。 根据目标函数和约束函数是否为线性,将规划模型分为线性规划和非线性规划。 4.1线性规划 线性规划(LP)研究的实际问题多种多样的,它在工农业生产、经济管理、优化设计与控
第四章 非线性规划 山大刁在筠 运筹学讲义教学内容
第四章 非线性规划 教学重点:凸规划及其性质,无约束最优化问题的最优性条件及最速下降法,约束最优化问题的最优性条件及简约梯度法。 教学难点:约束最优化问题的最优性条件。 教学课时:24学时 主要教学环节的组织:在详细讲解各种算法的基础上,结合例题,给学生以具体的认识,再通过大量习题加以巩固,也可以应用软件包解决一些问题。 第一节 基本概念 教学重点:非线性规划问题的引入,非线性方法概述。 教学难点:无。 教学课时:2学时 主要教学环节的组织:通过具体问题引入非线性规划模型,在具体讲述非线性规划方法的求解难题。 1、非线性规划问题举例 例1 曲线最优拟合问题 已知某物体的温度? 与时间t 之间有如下形式的经验函数关系: 3 12c t c c t e φ=++ (*) 其中1c ,2c ,3c 是待定参数。现通过测试获得n 组?与t 之间的实验数据),(i i t ?, i=1,2,…,n 。试确定参数1c ,2c ,3c ,使理论曲线(*)尽可能地与n 个测试点 ),(i i t ?拟合。 ∑=++-n 1i 221)]([ min 3i t c i i e t c c ?
例 2 构件容积问题 通过分析我们可以得到如下的规划模型: ??? ????≥≥=++++=0 ,0 2 ..)3/1( max 212 121222211221x x S x x x x a x x t s x x a V ππππ 基本概念 设n T n R x x x ∈=),...,(1,R R q j x h p i x g x f n j i α:,...,1),(;,...,1),();(==, 如下的数学模型称为数学规划(Mathematical Programming, MP): ?? ? ??===≤q j x h p i x g t s x f j i ,...,1,0)( ,...,1,0)( ..) ( min 约束集或可行域 X x ∈? MP 的可行解或可行点 MP 中目标函数和约束函数中至少有一个不是x 的线性函数,称(MP)为非线性规划 令 T p x g x g x g ))(),...,(()(1= T p x h x h x h ))(),...,(()(1=, 其中,q n p n R R h R R g αα:,:,那么(MP )可简记为 ?? ? ??≤≤ 0)( 0 ..)( min x h g(x)t s x f 或者 )(min x f X x ∈ 当p=0,q=0时,称为无约束非线性规划或者无约束最优化问题。 否则,称为约束非线性规划或者约束最优化问题。 定义4.1.1 对于非线性规划(MP ),若X x ∈*,并且有 X ),()(*∈?≤x x f x f 设计一个右图所示的由圆锥和圆柱面 围成的构件,要求构件的表面积为S , 圆锥部分的高h 和圆柱部分的高x 2之 比为a 。确定构件尺寸,使其容积最 大。
第四章 非线性规划约束极值问题
第四章 非线性规划 ?? ?? ???? 无约束最优化问题线性规划约束最优化问题非线性规划 ?? ?凸规划约束最优化问题非凸规划 ?? ?直接解法约束最优化问题求解方法间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于这类方法可以选用有效的无约束优化方法,且易于处理同时具有不等式约束和等式约束的问题,因而在工程优化中得到了广泛的应用。 直接解法是在满足不等式约束的可行设汁区域内直接按索问题的约束最优解。 第一节 目标函数的约束极值问题 所谓约束优化设计问题的最优性条件.就是指在满足等式和不等式约束条件下,其目标函数值最小的点必须满足的条件,须注意的是,这只是对约束的局部最优解而言。 对于带有约束条件的目标函数,其求最优解的过程可归结为: 一、约束与方向的定义 一)起作用约束与松弛约束 对于一个不等式约束()0g X ≤来说,如果所讨论的设计点() k X 使该约束()0g X =(或 者说() k X 当时正处在该约束的边界上)时,则称这个约束是() k X 点的一个起作用约束或紧约 束,而其他满足()0g X <的约束称为松弛约束。
冗余约束 4 0g ≤ 当一个设计点同时有几个约束起作用时,即可定义起作用约束集合为 {}()()()|()0,1,2, ,k k u I X u g X u m === 其意义是对() k X 点此时所有起作用约束下标的集合。 二)冗余约束 如果一个不等式约束条件的约束面(即()0g X =)对可行域的大小不发生影 响,或是约束面不与可行域D 相交,即此约束称为冗余约束。 三)可行方向 可行方向:一个设计点()k X 在可行域内,沿某一个方向S 移动,仍可得到一个属于可行域的新点,则称该方向为可行方向。 1)设计点为自由点 设计点() k X 在可行域内是一个自由点,在各个方 向上都可以作出移动得到新点仍属于可行域,如图所示。 2)设计点为约束边界点 当设计点()k X 处于起作用约束i g 上时,它的移动就会受到可行性的限制。此时,()k X 点的可行方向S 必满足条件: ()0T k i S g X ?≤ (解释:()()cos ,()T k k T k i i i S g X S g X S g X ?=??,,()90T k i S g X ?≥?)) 当,()90T k i S g X ?=?时,方向S 是约束函数i g 在()k X 点处的切线方向,即()0T k i S g X ?=。 当某个设计点x 同时有几个约束起作用时(如
第四章非线性规划5-可行方向法
第五节可行方向法(FDM ) 可行方向法是用梯度去求解约束非线性最优化问题的一种有代表性的直接探索方法,也是求解大型约束优化设计问题的主要方法之一。其收敛速度快,效果较好,适用于大中型约 束最优化问题,但程序比较复杂。 可行方向法(Feasible Direction Method)是一种直接搜索方法,其搜索方向的获取利用了目标函数和约束函数的梯度信息。用目标函数的梯度可以得到目标函数值的下降方向,而利用约束函数的梯度则可以得到可行的搜索方向。因此,可行方向法的搜索方向实质上是既使 目标函数值下降,同时又可行的方向,即可行下降方向。满足这一条件的方法就称为可行方 向法。 一、基本原理 当求解目标函数的极小值 min f (X) X R n s.t g u(X)M0 u =1,2,3川,m 当设计点X(k)处于起作用约束g i 上时,下降可行方向S必须同时满足条件: S“g(X k)乞0 S^f (X k) ::0 由于于多数非线性规划的最优点都处在可行区的约束边界上或者几个约束边界的交点 上,因此最优搜索如能沿着约束边界附近进行,就有可能加速最优化搜索的进程。按照这一基本思路,在任意选定一初始点后到最后得到最优点必须解决三个问题:一是如何尽快使最优搜索从初始点到达约束边界 二是到达边界后怎样判断所找到的边界点是否是最优点; 三是如果边界点经判断不是最优点,那么下一步应如何进行最优搜索。 二、如何从初始点尽快到达边界 在任意选定初始点X0之后,首先判断X0是否为可行点,若是可行点,则选择目标函数的负梯度方向作为下一步的搜索方向。若是非可行点,则选择目标函数的梯度方 向为搜索方向。 搜索的步长可采用试探的方法逐步缩小,直到最后到达边界。 如图5-13表示了初始点为可行点时的搜索过程。 从初始点X0出发沿-\f(X°)方向,取步长为t,进行搜索,得到 X1 x1=X° -r f (X0) 若X1仍在可行区内,则把步长加大一倍继续搜索 得到 團银门 初始負到达 边界过理
非线性规划
非线性规划(nonlinear programming) 1.非线性规划概念 非线性规划是具有非线性约束条件或目标函数的数学规划,是运筹学的一个重要分支。非线性规划研究一个n元实函数在一组等式或不等式的约束条件下的极值问题,且目标函数和约束条件至少有一个是未知量的非线性函数。目标函数和约束条件都是线性函数的情形则属于线性规划。 2.非线性规划发展史 公元前500年古希腊在讨论建筑美学中就已发现了长方形长与宽的最佳比例为0.618,称为黄金分割比。其倒数至今在优选法中仍得到广泛应用。在微积分出现以前,已有许多学者开始研究用数学方法解决最优化问题。例如阿基米德证明:给定周长,圆所包围的面积为最大。这就是欧洲古代城堡几乎都建成圆形的原因。但是最优化方法真正形成为科学方法则在17世纪以后。17世纪,I.牛顿和G.W.莱布尼茨在他们所创建的微积分中,提出求解具有多个自变量的实值函数的最大值和最小值的方法。以后又进一步讨论具有未知函数的函数极值,从而形成变分法。这一时期的最优化方法可以称为古典最优化方法。 最优化方法不同类型的最优化问题可以有不同的最优化方法,即使同一类型的问题也可有多种最优化方法。反之,某些最优化方法可适用于不同类型的模型。最优化问题的求解方法一般可以分成解析法、直接法、数值计算法和其他方法。 (1)解析法:这种方法只适用于目标函数和约束条件有明显的解析表达式的情况。求解方法是:先求出最优的必要条件,得到一组方程或不等式,再求解这组方程或不等式,一般是用求导数的方法或变分法求出必要条件,通过必要条件将问题简化,因此也称间接法。 (2)直接法:当目标函数较为复杂或者不能用变量显函数描述时,无法用解析法求必要条件。此时可采用直接搜索的方法经过若干次迭代搜索到最优点。这种方法常常根据经验或通过试验得到所需结果。对于一维搜索(单变量极值问题),主要用消去法或多项式插值法;对于多维搜索问题(多变量极值问题)主要应用爬山法。 (3)数值计算法:这种方法也是一种直接法。它以梯度法为基础,所以是一种解析与数值计算相结合的方法。 (4)其他方法:如网络最优化方法等。
第四章 非线性规划4-复合形法
第四节 复合形法 复合形法(Complex Method)是1965年由博克斯(Box)提出,后经古恩(Gwin)修正的解非线性规划的一种直接搜索法。如同随机方向搜索法一样.在确定搜索方向时,它不需要函数的梯度信息,它是求解非线规划中的一种简单适用的方法。 一、基本原理 对于约束优化问题 (0)min () .. ()0 1,2,3, 1,2,n u i i i f X X R s t g X u m a x b i n ?∈?≤=??≤≤=? 使用迭代格式 1= 1,2,3, k k k k k k X X X X S k α+=+?+ = 所谓复合形是指在n 维设计空间的可行域内由k(=n+1~2n)个顶点所构成的多面体。 复合形法是一种在可行域内直接的求优方法。 利用复合形各顶点处目标函数值的大小关系,判断目标函数值的下降方向,不断丢掉函数值最大的所谓最差点,代之以既使目标函数值有所下降又能满足所有约束条件的一个新点,从而不断地构成新的复合形。如此重复计算,使新的复合形不断地向可行域的最优点移动和收缩,直至得到满足收敛准则的近似解为止。 由于对复合形不必保持规则图形,顶点数较多,因此可以求解非线性的约束问题,面且计算稳定可靠。但不能用于解含有等式约束的问题。 二、复合形的迭代步骤 一)确定复合形的顶点 复合形法是一种在可行域内直接的求优方法,要求第一个复合形的k 个顶点都是可行的。对复合形的顶点数一般推荐取k=2n ,当n 计算问题的维数较多(如n>5)时,可取k =n+1。如果复合形顶点数少了,一旦出现丢失顶点现象就可能会出现降维搜索而找不到真正的最优点。 初始复合形的确定方法有如下几种: (1)给定k 个初始顶点。由设计者预先选择k 个设计方案,即人工构造一个初始复合形。由于k 个顶点都必须满足所有的约束条件,因此当设计变量数目较多或约束条件比较复杂时,这样做可能是很不方便的或者是很困难的。 (2)给定一个初始顶点,随机产生其他顶点。如果用常规设计方法能取得一个设计方案,此方案虽然不是最优的,但却是一个可行的。则其他k-1个顶点可用随机法产生 ()(-) 1,2, 1,2,j j i i i i i x a r b a i n j k =+== 式中 ,i i a b —各设计变量的i x 的上、下界限,一般取边界约束值;
第四章 非线性规划5-可行方向法
第五节 可行方向法(FDM ) 可行方向法是用梯度去求解约束非线性最优化问题的一种有代表性的直接探索方法,也是求解大型约束优化设计问题的主要方法之一。其收敛速度快,效果较好,适用于大中型约束最优化问题,但程序比较复杂。 可行方向法(Feasible Direction Method)是一种直接搜索方法,其搜索方向的获取利用了目标函数和约束函数的梯度信息。用目标函数的梯度可以得到目标函数值的下降方向,而利用约束函数的梯度则可以得到可行的搜索方向。因此,可行方向法的搜索方向实质上是既使目标函数值下降,同时又可行的方向,即可行下降方向。满足这一条件的方法就称为可行方向法。 一、基本原理 当求解目标函数的极小值 min () .. ()0 1,2,3,n u f X X R s t g X u m ?∈?≤=? 当设计点()k X 处于起作用约束i g 上时,下降可行方向S 必须同时满足条件: ()0T k i S g X ?≤ ()0T k S f X ?< 由于于多数非线性规划的最优点都处在可行区的约束边界上或者几个约束边界的交点上,因此最优搜索如能沿着约束边界附近进行,就有可能加速最优化搜索的进程。按照这一基本思路,在任意选定—初始点后到最后得到最优点必须解决三个问题: 一是如何尽快使最优搜索从初始点到达约束边界 二是到达边界后怎样判断所找到的边界点是否是最优点; 三是如果边界点经判断不是最优点,那么下一步应如何进行最优搜索。 二、如何从初始点尽快到达边界 在任意选定初始点0X 之后,首先判断0X 是否为可行点,若是可行点,则选择目标函数的负梯度方向 作为下一步的搜索方向。若是非可行点,则选择目标 函数的梯度方向为搜索方向。 搜索的步长可采用试探的方法逐步缩小,直到最 后到达边界。 如图5-13表示了初始点为可行点时的搜索过程。 从初始点0X 出发沿0()f X -?方向,取步长为t , 进行搜索,得到1X 100()X X t f X =-? 若1X 仍在可行区内,则把步长加大一倍继续搜索 得到
第四章 非线性规划2-SUMT方法(罚函数法)
第二节 SUMT 方法(罚函数法) 一、SUMT 方法的原理 SUMT (sequential unconstrained minimization technique )法,序列无约束极小化方法,亦称为罚函数法。它是一种不等式约束最优化问题的间接解法 它的基本思想是将原来的目标函数和约束函数按一定的方式构成一个新的函数,在这个新函数中,既包括目标函数,又包括全部约束函数和一个可以变化的乘子。 当这个乘子按一定的方式改变时,就得到一个新函数序列,求每一个新函数的最优解都是一个无约束最优化问题,这样就把一个约束最优化问题转化为一系列无约束最优化问题进行求解。所得到的最优解序列将逐步逼近原问题的最优解。 引例一:min ()f X ax = s.t ()0g X b x =-≤ 显然f (X )的最优点为x*=b ,对应的最小值为f (X*)=ab 用SUMT 求解函数的最优解 构造函数 11(,)()()k k k X r f X r ax r g X b x Φ=-=-- 0k r >—可变化乘子,它是一个很小的正 数。 其最优解为: *()k X r b =+ 此时对应的(,)k X r Φ的最小值为 ***1(,)k k X r ax r b x ab Φ=--=+ 最优点*()k X r 和最小值*(,)k X r Φ均是k r 的函数。当k r 取不同值时,它们有不同的值,而当0k r →时,**()k X r X b →=,*(,)*k X r f X ab Φ→=(),即最后收敛于约束最优点。 min lim[min (,)]() {|()0}k k i r X r f X R X g X X R →Φ==≤∈ 以上分析从理论上说明了无约束最优化问题min (,)k X r Φ与约束优化问题 min () {|()0}i f X R X g X X R =≤∈之间的联系:约束非线性规划问题可以通过构造新目 标函数序列,用无约束优化方法求其极小点,并逐次逼近原问题的最优点。 问题:如何构造新函数?或者说新函数具有什么特点?
第四章非线性规划
第四章 非线性规划 本章, 我们介绍两种解决非线性规划问题的软件: 第一种: MATLAB 中的optimization toolbox 中的若干程序; 第二种: LINGO 软件. 1.MATLAB 程序说明 1.1 无约束问题 程序名: unpfun1函数, unpfun2函数 unpfun1 实例: Minimize the function 221122()32f x x x x x =++ 在命令窗口输入以下信息: >> x0=[1,1]; % Then call fminunc to find a minimum of unpfun1 near [1,1] >> [x,fval]=fminunc(@unpfun1,x0) 输出以下信息: Optimization terminated successfully: Search direction less than 2*options.TolX x = 1.0e-008 * -0.7591 0.2665 fval = 1.3953e-016 unpfun2实例:将上述的实例用梯度法做 在命令窗口输入以下信息: >> options = optimset('GradObj','on'); % To minimize this function with the gradient provided >> x0 = [1,1]; >> [x,fval] = fminunc(@unpfun2,x0,options) 输出以下信息: Optimization terminated successfully: First-order optimality less than OPTIONS.TolFun, and no negative/zero curvature detected x = 1.0e-015 * 0.1110 -0.8882