双闭环模糊控制系统的设计与仿真
《运动控制系统》课程设计学院:物联网工程学院
班级:
姓名:
学号:
日期:
成绩:
文章编号:
双闭环模糊控制系统的设计与仿真
(江南大学物联网工程学院,江苏省无锡邮编214122)
摘要:直流电机具有良好的起动、制动性能,因此其在电力拖动自动控制系统中应用广泛。众所周知,直流电机的闭环系统静特性要比开环系统的机械特写硬的多,而转速、电流双闭环控制直流调速系统是性能好、应用最广泛的直流调速系统,但该系统依赖精确的数学模型,在增加解决环节的同时,系统模型趋于复杂,还可能会影响系统的可靠性。因此我们在总结了以前经验的同时,提出了双闭环模糊控制系统的的设计与仿真。
关键词:直流电机;双闭环系统;模糊控制
中图分类号:文献标识码:A
Double Closed Loop Fuzzy Control System Design and Simulation
Author name
(Jiangnan University, Wuxi 214122, China)
Abstract:DC motor has good starting, braking performance, therefore in the electric drive automatic control system is widely applied in the field of. As everyone knows, the closed-loop DC motor system static characteristics than the open loop system of mechanical feature of more than hardware, and speed, electric current double closed loop DC motor control system is of good performance, the most widely used DC speed regulating system, but the system depend on the accurate mathematical model, increase solve link at the same time, the system model tends to be complex, also may influence the reliability of the system. Therefore we are summing up the previous experience at the same time, put forward a double closed loop fuzzy control system design and simulation.
Key words:DC Motor; Double Closed Loop System; Fuzzy Control
1 引言
2 双闭环直流调速系统的设计
直流电动机具有启动转矩大、调速范围宽等优势,在轧钢机、电力机车等方面仍广泛采用。直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础;电力电子技术、计算机控制技术、智能控制理论的发展,,更为直流调速系统继续发展和应用提供了契机。进入21世纪后国外一些公司仍在不断推出高性能直
流调速系统。因此,对直流调速系统的研究仍具有重要意义。
直流调速系统中最典型的控制方式就是速度、电流双闭环调速。由于受参数时变和不确定性等因素的影响,传统的控制方法常受到很大的局限。另外,PID 控制方法往往在系统快速性与稳定性之间不能两者兼顾。模糊控制不依赖于被控对象的精确数学模型,既能克服非线性因素的影响,又具有较强的鲁棒性。因此,给直流电动机双闭环调速系统引入模糊控制器,可以改善系统性能。
2.1 双闭环可逆直流调速系统的原理结构
为了实现转速和电流两种负反馈分别起作用,
可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者之间实行串级联接。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变
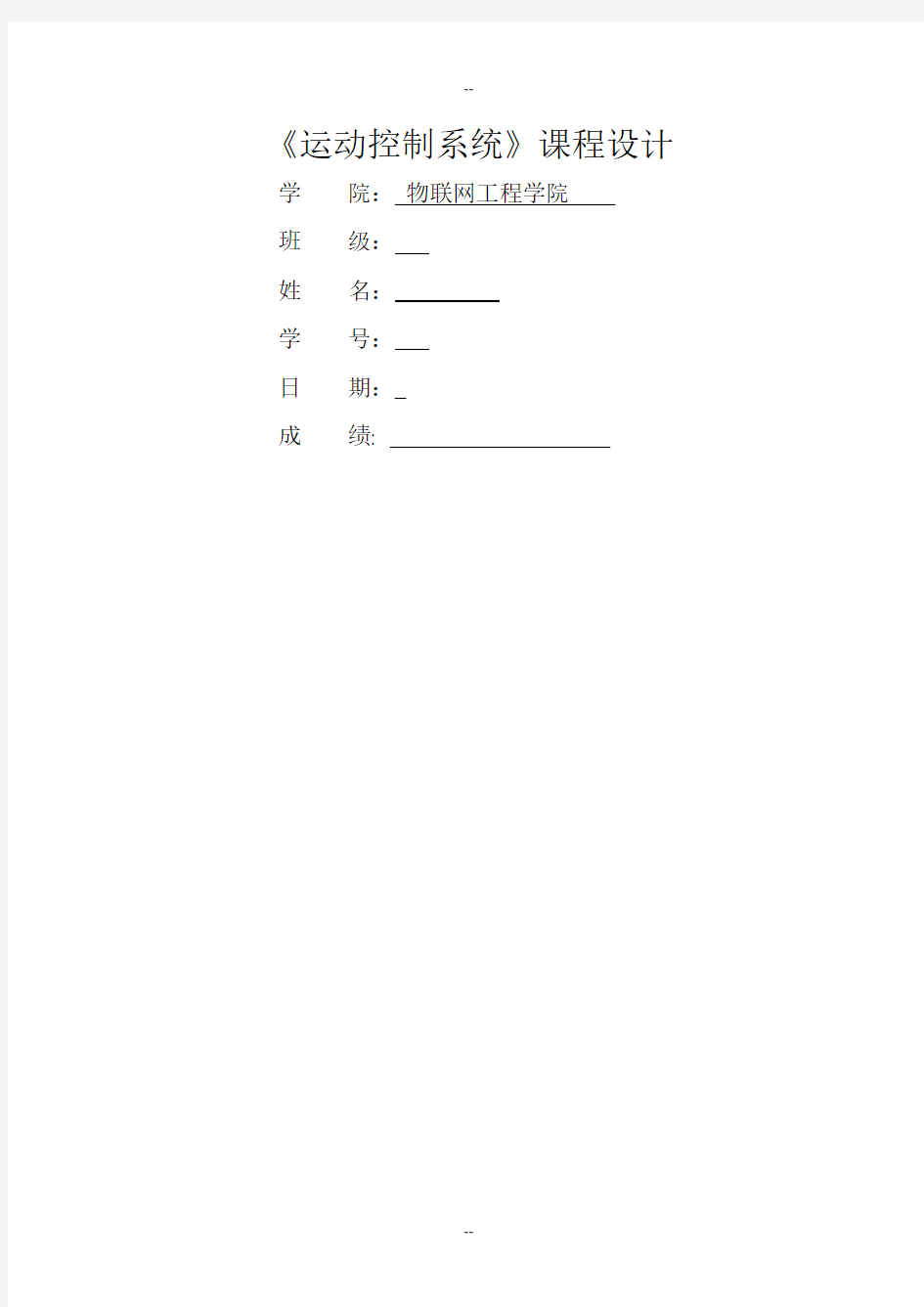
换器UPE。从闭环结构上看,电流环在里面,称作内环;转速环在外面,称作外环。这样就形成了转速、电流双闭环调速系统。如图1所示。
图1直流双闭环调速系统结构
双闭环直流调速系统目前应用广泛、技术成熟,常采用PID控制方式,它具有结构简单、可靠等优点,取得了较好的控制效果。但是,在实际生产现场,由于条件限制,使得PID控制器参数的整定往往难以达到最优状态,另外,PID 控制方法必须在系统快速性与稳定性程度之间做出折衷,往往不能两者兼顾,而模糊控制能利用其非线性特性,突破PID方法的局限,使调速系统既有快速的动态响应,又有较高的稳定程度。除此之外,模糊控制又进一步提高了调速系统的鲁棒性。
调速系统的模糊控制模型在异步电动机闭环调
速系统的结构中,转速环是决定控制系统的根本原因,而电流环则主要是改变电机运行特性以利于外
环控制。本文在建立仿真模型时,转速环采用模糊控制器而电流环仍采用传统的PID控制器。考虑电动机的实际运行,在电流环PID的设计中,积分作用项加上了内限幅环节,而电流调节器的输出则加上外
限幅环节。
2.2 模糊集和模糊论域及隶属函数的确立
二维模糊控制器的输入变量基本上选用受控变量值和输入给定值的偏差e和偏差变化ec,由于它们能够严格地反映受控过程中输出量的动态特性,
因此,在控制效果上要比一维控制器好的多,也是目前采用较广泛的一类模糊控制器。图2 是模糊控制器的结构图。
图2 模糊控制器结构图
双闭环直流调速系统的电流环仍采用PID控制,而速度环采用模糊控制,在模糊控制器中,偏差e采用负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)7个模糊状态来描述,相应的论域:e={-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5 ,+6}偏差变化ec采用NB,NM,NS,ZO,PS,PM,PB7 个模糊状态来描述,其论域
为:ec={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}控制量u 采用NB,NM,NS,ZO,PS,PM,PB7个模糊状态来描述,其论域
为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}误差e、误差变化ec及控制量u的模糊集和论域确定后,需对模糊变量确定隶属函数,即对模糊变量赋值,确定论域内元素对模糊变量的隶属度。选择输入变量的隶属度函数为三角型函数,输出变量的隶属度函数也为三角型函数。得到的E、EC 和U的隶属函数如图3 所示。
图3 变量隶属度函数图
2.3 模糊控制规则的建立
输入模糊变量通过模糊规则与输出模糊变量建立关系,在考虑模糊控制规则时,选取控制量变化得原则为:当误差大或较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量要注意防止超调,以系统得稳定性为主要出发点。控制规则表如表1 所示。
表1模糊控制规则
3 系统仿真
我们最后应用MATLAB语言中的SIMULINK 工具,对模糊控制器在直流调速系统中的控制效果
进行仿真,在仿真过程中,分别将外环的转速调节器置为模糊控制器,用于仿真的数据如下:直流电动机:220V,136A,1460r/min,Ce=0 132Vm
in/r,过载倍数λ=1 5,Ks=40,R=0 5Ω,T1=0 03s,Tm=0 18s,Toi=0 002s,Ton=0 01s,反馈系数:α=0 007Vmin/r,β=0 05V/A。直流电机:220V,136A,1460r/min,Ce=0.132V·min/r;晶闸管装置放大系数Ks=40;电枢回路总电阻R=0.5Ω;时间常数Tl=0.03s,Tm=0.18s;电流反馈系数β=0.05V/A;三相桥式电路的平均失控时间
Ts=0.0017s。给定的输入阶跃角速度为150rad/s,得到响应的转速曲线如图4。
图4 模糊-PI转速响应曲线
为与传统的双闭环控制相比,建立常规的双闭
环控制仿真模型,得到的仿真曲线如图5所示,从图中可以看出,系统的超调量较大,调节时间较长。由图4 模糊-PI 可知,系统响应的超调量减小了,系统的稳态时间缩短了,并且有效抑制了振荡,控制精度较高。
图5 双PI 调节器转速响应曲线4结语
( 1) 严格工程设计下的常规直流双闭环系统动、静态性能较好, 适用性强, 其理论体系为其它调速技术的基础;
( 2) 借助Matlab的模糊逻辑工具箱不但能实现Simulink的无缝连接, 而且通过
Real2timeWorkshop能生成ANSIC源代码, 从而易于实现模糊系统的实时应用;
( 3) 比较而言, 引入模糊控制的新双闭环调速系统响应速度提高、过渡稳定、系统超调得到改善,为直流双闭环调速系统的又一可选策略。
参考文献(References)
[1]陈伯时.电力拖动自动控制系统—运动控制系统.
[2]章卫国,杨向忠.模糊控制理论与应用.
[3]刘金琨.先进PID控制MATLAB仿真
[4]章丽红,臧小惠.基于 FUZZY- PID直流调速系统的
仿真与分析
[5]蔡自兴.智能控制—基础与应用
[6]何志琴.基于MATLAB 软件的直流调速系统辅助设计
双闭环模糊控制系统的设计与仿真
《运动控制系统》课程设计 学院:物联网工程学院 班级: 姓名: 学号: 日期: 成绩:
文章编号: 双闭环模糊控制系统的设计与仿真 (江南大学物联网工程学院,江苏省无锡邮编214122) 摘要:直流电机具有良好的起动、制动性能,因此其在电力拖动自动控制系统中应用广泛。众所周知,直流电机的闭环系统静特性要比开环系统的机械特写硬的多,而转速、电流双闭环控制直流调速系统是性能好、应用最广泛的直流调速系统,但该系统依赖精确的数学模型,在增加解决环节的同时,系统模型趋于复杂,还可能会影响系统的可靠性。因此我们在总结了以前经验的同时,提出了双闭环模糊控制系统的的设计与仿真。 关键词:直流电机;双闭环系统;模糊控制 中图分类号:文献标识码:A Double Closed Loop Fuzzy Control System Design and Simulation Author name (Jiangnan University, Wuxi 214122, China) Abstract:DC motor has good starting, braking performance, therefore in the electric drive automatic control system is widely applied in the field of. As everyone knows, the closed-loop DC motor system static characteristics than the open loop system of mechanical feature of more than hardware, and speed, electric current double closed loop DC motor control system is of good performance, the most widely used DC speed regulating system, but the system depend on the accurate mathematical model, increase solve link at the same time, the system model tends to be complex, also may influence the reliability of the system. Therefore we are summing up the previous experience at the same time, put forward a double closed loop fuzzy control system design and simulation. Key words:DC Motor; Double Closed Loop System; Fuzzy Control 1 引言 2 双闭环直流调速系统的设计 直流电动机具有启动转矩大、调速范围宽等优势,在轧钢机、电力机车等方面仍广泛采用。直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础;电力电子技术、计算机控制技术、智能控制理论的发展,,更为直流调速系统继续发展和应用提供了契机。进入21世纪后国外一些公司仍在不断推出高性能直 流调速系统。因此,对直流调速系统的研究仍具有重要意义。 直流调速系统中最典型的控制方式就是速度、电流双闭环调速。由于受参数时变和不确定性等因素的影响,传统的控制方法常受到很大的局限。另外,PID 控制方法往往在系统快速性与稳定性之间不能两者兼顾。模糊控制不依赖于被控对象的精确数学模型,既能克服非线性因素的影响,又具有较强的鲁棒性。因此,给直流电动机双闭环调速系统引入模糊控制器,可以改善系统性能。 2.1 双闭环可逆直流调速系统的原理结构 为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者之间实行串级联接。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变 换器UPE。从闭环结构上看,电流环在里面,称作内环;转速环在外面,称作外环。这样就形成了转速、电流双闭环调速系统。如图1所示。 图1直流双闭环调速系统结构 双闭环直流调速系统目前应用广泛、技术成熟,常采用PID控制方式,它具有结构简单、可靠等优点,取得了较好的控制效果。但是,在实际生产现场,由于条件限制,使得PID控制器参数的整定往往难以达到最优状态,另外,PID 控制方法必须在系统快
基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点
基于simulink的模糊控制仿真
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计 (1)常规的PID控制器; (2)常规的模糊控制器; (3)比较两种控制器的效果; (4)当通过改变模糊控制器的比例因子时,系统响应有什么变化? 一.基于simulink的PID控制器的仿真及其调试: 调节后的Kp,Ki,Kd分别为:10 ,1,0.05。 示波器观察到的波形为: 二.基于simulink的模糊控制器的仿真及其调试: (1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“FIS Editor”界面,即模糊推理系统编辑器。
(2)双击输入量或输出量模框中的任何一个,都会弹出隶属函数编辑器,简称MF编辑器。
(3)在FIS Editor界面顺序单击菜单Editor—Rules出现模糊规则编辑器。 本次设计采用双输入(偏差E和偏差变化量EC)单输出(U)模糊控制器,E的论域是[-6,6],EC的论域是[-6,6],U的论域是[-6,6]。它们的状态分别是负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。语言值的隶属函数选择三角形的隶属度函数。推理规则选用Mamdani 控制规则。 该控制器的控制规则表如图所示:
Simulink仿真图如下: 在调试过程中发现加入积分调节器有助于消除静差,通过试凑法得出量化因子,比例因子以及积分常数。Ke,Kec,Ku,Ki分别是: 3 ,2.5 ,3.5 ,0.27
三.实验心得: 通过比较PID控制器和模糊控制器,我们可知两个系统观察到的波形并没有太大的区别。相对而言,对于给出精确数学模型的控制对象,PID控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果;对于给出给出精确数学模型的控制对象,模糊控制器并没有展现出太大的优势,其一是操作繁琐,其二是模糊控制器调节参数的难度并不亚于PID控制器。 在实验中增大模糊控制器的比例因子Ku会加快系统的响应速度,但Ku过大将会导致系统输出上升速率过快,从而使系统产生较大的超调量乃至发生振荡;Ku过小,系统输出上升速率变小,将导致系统稳态精度变差。
双闭环系统仿真深入设计
H a r b i n I n s t i t u t e o f T e c h n o l o g y 控制系统数字仿真及C A D 实验报告 院系:电气工程及自动化 班级:0106512 设计者:王宏佳/张卫杰 学号:1010610108 哈尔滨工业大学电气工程系
2005年8月 摘要 本实验报告的第一部分详细阐述了直流电动机双闭环调速系统的CAD设计过程,主要采用了MATLAB/Simulink工具箱。 一般情况下,KZ-D系统均设计成转速、电流双闭环形式。双闭环直流调速系统着重解决了如下两方面的问题:启动的快速性问题和提高系统抗扰性能。 双闭环KZ-D系统中的ASR和ACR一般均采用PI调节器。为了获得较好的跟随性能,电流环按照典型Ⅰ型系统设计,为了获得较好的抗扰性能,转速环按照典型Ⅱ型系统设计。按照先内环,后外环的设计思想设计。 实验报告的第二部分着重讨论了基于 MATLAB/SimPowerSystem工具箱的双闭环直流调速系统仿真分析。
第一部分直流电动机双闭环调速系统设计及分析 自70年代以来,国内外在电气传动领域里,大量地采用了“晶闸管整流电动机调速”技术(简称KZ-D调速系统)。尽管当今功率半导体变流技术已有了突飞猛进的发展,但在工业生产中KZ-D系统的应用还是占有相当比重的。 一般情况下,KZ-D系统均设计成转速、电流双闭环形式;“双闭环控制”是经典控制理论在实践中的重要运用,在许多实际生产实践中大量存在。无论是直流调速系统、龙门吊车系统还是一阶倒立摆的控制,都可以通过双闭环控制技术,来实现对控制对象的控制。因此理解双闭环控制技术的原理,掌握双闭环控制的设计方法,是工业控制领域技术人员的一项基本要求。 然而,由于双闭环控制技术所依赖的经典控制理论只能解决线性定常系统设计问题,而实际系统往往是非线性的;所以,设计时要进行线性化等近似处理,由此而引起的模型不准确问题将会影响到设计参数的选取(这种影响有时会导致3~5倍的误差),这给实际系统的调试带
控制系统仿真与CAD 实验报告
《控制系统仿真与CAD》 实验课程报告
一、实验教学目标与基本要求 上机实验是本课程重要的实践教学环节。实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用 MATLAB/Simulink 求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。 通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。 上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。 二、题目及解答 第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析 1. >>f=inline('[-x(2)-x(3);x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x(:,1),x(:,2)), grid
2. >>y=@(x)x(1)^2-2*x(1)+x(2);ff=optimset;https://www.360docs.net/doc/5e9815075.html,rgeScale='off';ff.TolFun=1e-30;ff.Tol X=1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[ x,f,c,d]=fmincon(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff) Warning: Options LargeScale = 'off' and Algorithm = 'trust-region-reflective' conflict. Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning, use Algorithm = 'active-set'. > In fmincon at 456 Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.
实验一--模糊控制器的MATLAB仿真
实验一 模糊控制器的MATLAB 仿真 一、实验目的 本实验要求利用MATLAB/SIMULINK 与FUZZYTOOLBOX 对给定的二阶动态系统,确定模糊控制器的结构,输入和输出语言变量、语言值及隶属函数,模糊控制规则;比较其与常规控制器的控制效果;研究改变模糊控制器参数时,系统响应的变化情况;掌握用 MATLAB 实现模糊控制系统仿真的方法。 实验时数:3学时。 二、实验设备:计算机系统、Matlab 仿真软件 三、实验原理 模糊控制器它包含有模糊化接口、规则库、模糊推理、清晰化接口等部分,输人变量是过程实测变量与系统设定值之差值。输出变量是系统的实时控制修正变量。模糊控制的核心部分是包含语言规则的规则库和模糊推理。模糊推理就是一种模糊变换,它将输入变量模糊集变换为输出变量的模糊集,实现论域的转换。工程上为了便于微机实现,通常采用“或”运算处理这种较为简单的推理方法。Mamdani 推理方法是一种广泛采用的方法。它包含三个过程:隶属度聚集、规则激活和输出总合。模糊控制器的体系结构如图1所示。 图1 模糊控制器的体系结构 四、实验步骤 (1)对循环流化床锅炉床温,对象模型为 ()()1140130120 ++s s 采用simulink 图库,实现常规PID 和模糊自整定PID 。 (2)确定模糊语言变量及其论域:模糊自整定PID 为2输入3输出的模糊控制器。该模糊控制器是以|e|和|ec|为输入语言变量,Kp 、Ki 、Kd 为输出语言变量,其各语言变量的论域如下:
误差绝对值:e={0,3,6,10}; 误差变化率绝对值:ec={0,2,4,6}; 输出Kp:Up={0,0.5,1.0,1.5}; 输出Ki:Ui={0,0.002,0.004,0.006}; 输出Kd:Ud={0,3,6,9}。 (3)语言变量值域的选取:输入语言变量|e|和|ec|的值域取值“大”(B)、“中”(M)、“小”(s)和“零”(Z) 4种;输出语言变量Kp、Ki、Kd的值域取值为“很大”(VB)、“大”(B)、“中”(M)、“小”(s) 4种。 (4)规则的制定:根据PID参数整定原则及运行经验,可列出输出变量Kp、Ki、Kd 的控制规则表。 (5)推理方法的确定 隐含采用“mamdani”方法:max-min; 推理方法,即“min”方法; 去模糊方法:面积中心法; 选择隶属函数的形式:三角型。
双闭环控制系统设计
双闭环控制系统设计 课程设计报告 电力拖动自动控制系统课程设计 题目:双闭环控制系统设计学生姓名:董长青专业:电气自动化技术专业班级: Z070303 学号: Z07030330 指导教师:姬宣德 日期:2010年03月10日 随着现代工业的发展,在调速领域中,双闭环控制的理念已经得 到了越来越广泛的认同与应用。相对于单闭环系统中不能随心所欲地 控制电流和转矩的动态过程的弱点。双闭环控制则很好的弥补了他的 这一缺陷。 双闭环控制可实现转速和电流两种负反馈的分别作用,从而获得 良好的静,动态性能。其良好的动态性能主要体现在其抗负载扰动以 及抗电网电压扰动之上。正由于双闭环调速的众多优点,所以在此有 必要对其最优化设计进行深入的探讨和研究。本次课程设计目的就是 旨在对双闭环进行最优化的设计。 Summary With the development of modern industry, in the speed area, the concept of dual-loop control has been increasingly widespread recognition and application. Relative to the single closed-loop system can not arbitrarily control the dynamic
process of current and torque weakness. Double closed-loop control is very good to make up for this shortcoming of his. Double-loop speed and current control can achieve the difference of two negative feedback effect, thus get a good static and dynamic performance. The good dynamic performance mainly reflected in its anti-disturbance and anti-grid load over voltage disturbance. Precisely because of the many advantages of Double Closed Loop, so here it is necessary to optimize the design of its depth discussion and study. This course is designed to designed to optimize the double loop design. 一.课程设计设计说明书4 1.1系统性能指标 1.2整流电路4 1.3触发电路的选择和同步5 1.4双闭环控制电路的工作原理6 二. 设计计算书7 2.1整流装置的计算7 2.1.1变压器副方电压7 2.1.2变压器和晶闸管的容量8 2.1.3平波电抗器的电感量8 2.1.4晶闸管保护电路9 2.2 控制电路的计算10
《控制系统计算机仿真》实验指导书
实验一 Matlab使用方法和程序设计 一、实验目的 1、掌握Matlab软件使用的基本方法; 2、熟悉Matlab的数据表示、基本运算和程序控制语句 3、熟悉Matlab绘图命令及基本绘图控制 4、熟悉Matlab程序设计的基本方法 二、实验内容 1、帮助命令 使用help命令,查找sqrt(开方)函数的使用方法; 2、矩阵运算 (1)矩阵的乘法 已知A=[1 2;3 4]; B=[5 5;7 8]; 求A^2*B (2)矩阵除法 已知A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; A\B,A/B (3)矩阵的转置及共轭转置 已知A=[5+i,2-i,1;6*i,4,9-i]; 求A.', A' (4)使用冒号选出指定元素 已知:A=[1 2 3;4 5 6;7 8 9]; 求A中第3列前2个元素;A中所有列第2,3行的元素; (5)方括号[] 用magic函数生成一个4阶魔术矩阵,删除该矩阵的第四列 3、多项式 (1)求多项式p(x) = x3 - 2x - 4的根 (2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] , 求矩阵A的特征多项式; 求特征多项式中未知数为20时的值; 4、基本绘图命令 (1)绘制余弦曲线y=cos(t),t∈[0,2π] (2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t∈[0,2π] 5、基本绘图控制 绘制[0,4π]区间上的x1=10sint曲线,并要求: (1)线形为点划线、颜色为红色、数据点标记为加号; (2)坐标轴控制:显示范围、刻度线、比例、网络线 (3)标注控制:坐标轴名称、标题、相应文本; 6、基本程序设计 (1)编写命令文件:计算1+2+?+n<2000时的最大n值; (2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。 三、预习要求 利用所学知识,编写实验内容中2到6的相应程序,并写在预习报告上。
模糊PID控制器的设计与仿真——设计步骤(修改)
模糊PID 控制器的设计与仿真 设计模糊PID 控制器时,首先要将精确量转换为模糊量,并且要把转换后的模糊量映射到模糊控制论域当中,这个过程就是精确量模糊化的过程。模糊化的主要功能就是将输入量精确值转换成为一个模糊变量的值,最终形成一个模糊集合。 本次设计系统的精确量包括以下变量:变化量e ,变化量的变化速率ec 还有参数整定过程中的输出量ΔK P ,ΔK D ,ΔK I ,在设计模糊PID 的过程中,需要 将这些精确量转换成为模糊论域上的模糊值。本系统的误差与误差变化率的模糊论域与基本论域为:E=[-6,-4,-2,0,2,4,6];Ec=[-6,-4,-2,0,2,4,6]。 模糊PID 控制器的设计选用二维模糊控制器。以给定值的偏差e 和偏差变化ec 为输入;ΔK P ,ΔK D ,ΔK I 为输出的自适应模糊PID 控制器,见图1。 图1模糊PID 控制器 (1)模糊变量选取 输入变量E 和EC 的模糊化将一定范围(基本论域)的输入变量映射到离散区间(论域)需要先验知识来确定输入变量的范围。就本系统而言,设置语言变量取七个,分别为 NB ,NM ,NS ,ZO ,PS ,PM ,PB 。 (2)语言变量及隶属函数 根据控制要求,对各个输入,输出变量作如下划定: e ,ec 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ΔK P ,ΔK D ,ΔK I 论域:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} 应用模糊合成推理PID 参数的整定算法。第k 个采样时间的整定为 ).()(,)()(,)()(000k K K k K k K K k K k K K k K D D D I I I P P P ?+=?+=?+= 式中000,,D I P K K K 为经典PID 控制器的初始参数。
模糊控制系统建模与仿真分析
题目:模糊控制系统建模与仿真分析 一、实验目的 1、熟悉Matlab软件的基本操作方法 2、掌握用matlab/Fuzzy logic toolbox进行模糊控制系统建模仿真的基本方法。 3、熟悉模糊控制系统设计的基本方法 二、实验学时:4学时 三、实验原理 MATLAB R2008提供了建立模糊逻辑推理系统的仿真工具箱——Fuzzy Logic Toolbox,版本为Fuzzy Logic Toolbox2.2.7。建立模糊逻辑推理系统有两种基本方法,第一种方法是借助模糊推理系统编辑器(Fuzzy Logic Editor)的图形界面工具建立模糊逻辑推理系统,第二种方法是利用命令建立模糊逻辑推理系统。第一种方法使用简单、建模方便,适合于初学模糊逻辑控制系统建模与仿真的读者。第二种方法稍难一些,但对深入了解模糊逻辑推理系统的MATLAB仿真知识大有帮助。下面分别讲述两种方法,读者可自行选择阅读。 1模糊逻辑工具箱图形界面工具 模糊逻辑工具箱图形工具是为了方便用户建立模糊推理系统而推出的图形化设计工具,在这里可快速方便的建立模糊推理系统并观测模糊规则、推理输出等。模糊逻辑推理图形工具主要包括:基本模糊推理系统编辑器(fuzzy)、隶属函数编辑器(mfedit)、模糊规则编辑器(ruleedit)、模糊规则观测器(ruleview)、模糊推理输入输出曲面观测器(surfview)。下面分别介绍它们的基本使用方法。 1.1基本模糊推理系统编辑器 在Command Windows输入“fuzzy”命令,弹出如下图 1所示的“FIS Editor”(模糊推理系统编辑器)窗口。在这里可以对包括输入、输出模糊语言变量的名称、模糊推理系统的类型和名称、模糊逻辑推理的各种运算(与、或、蕴含、规则合成、解模糊化)等高层属性进行编辑。同时,还可以打开模糊推理系统的隶属函数编辑器(mfedit)、模糊规则编辑器(ruleedit)、模糊规则观测器(ruleview)、模糊推理输入输出曲面观测器(surfview)。
简易模糊控制器设计及MATLAB仿真
简易模糊控制器的设计及仿真 摘要:模糊控制(Fuzzy Control )是以模糊集理论、模糊语言和模糊逻辑推理为基础的一种控制方法,它从行为上模仿人的模糊推理和决策过程。本文利用MATLAB/SIMULINK 与FUZZY TOOLBOX 对给定的二阶动态系统,确定模糊控制器的结构,输入和输出语言变量、语言值及隶属函数,模糊控制规则,比较其与常规控制器的控制效果,用MATLAB 实现模糊控制的仿真。 关键词:模糊控制 参数整定 MATLAB 仿真 二阶动态系统模型: ()()1140130120 ++s s 采用simulink 图库,实现常规PID 和模糊自整定PID 。 一.确定模糊控制器结构 模糊自整定PID 为2输入3输出的模糊控制器。在MATLAB 的命令窗口中键入fuzzy 即可打开FIS 编辑器,其界面如下图所示。此时编辑器里面还没有FIS 系统,其文件名为Untitled ,且被默认为Mandani 型系统。默认的有一个输入,一个输出,还有中间的规则处理器。在FIS 编辑器界面上需要做一下几步工作。 首先,模糊自整定PID 为2输入3输出的模糊控制器,因此需要增加一个输入两个输出,进行的操作为:选择Edit 菜单下的Add Variable/Input 菜单项。
如下图。 其次,给输入输出变量命名。单击各个输入和输出框,在Current Variable 选项区域的Name文本框中修改变量名。如下图 最后,保存系统。单击File菜单,选择Export下的To Disk项。这里将创建的系统命名为PID_auot.fi。 二.定义输入、输出模糊集及隶属函数
基于Simulink仿真双闭环系统综合课程设计
- -- 课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号2 08自动化1班成员一:陈木生学号3 08自动化1班 指导老师: 日期:2012-2-28 华南农业大学工程学院
摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速Simulink 自动控制
目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料.......................................................
模糊控制系统仿真实验
华侨大学厦门工学院《智能控制技术》 实验报告 专业:电气工程及其自动化 班级: 时间:年月日~年月日 ―――――――以下指导教师填写――――― 分项成绩:出勤设计报告 总成绩: 指导教师: 目录
摘要 (1) 一、设计的目的 (2) 二、设计要求 (2) 三、设计过程 (3) 1.系统模型建立 (3) 2.模糊控制器设计 (3) 2.1 模糊集合及论域的定义 (3) 2.2模糊控制规则设计 (6) 2.3系统的参数选择 (7) 2.4仿真结果 (7) 四、设计分析 (9) 1.改变模糊控制隶属度函数对控制效果的影响 (9) 2.给系统模型加扰动对控制效果的影响 (12) 3.改变系统的参数对控制效果的影响 (13) 五、模糊控制的优点 (15) 六、总结 (15) 致谢 (16) 参考文献 (16)
摘要 模糊控制的研究主要体现在控制器的研究和开发以及各类实际应用中, 目前模糊控制已经应用在各个行业。各类模糊控制器也非常多, 模糊控制器的研究一直是控制界研究的热点问题, 而关于模糊控制系统的稳定性分析则是模糊控制需要研究和解决的基本问题。目前已经出现了为实现模糊控制功能的各种集成电路芯片。用MATLAB软件实现模糊控制系统的仿真结果,仿真结果表明MATLAB软件不但简单实用,而且响应速度快,超调量小,控制效果良好。 关键词:模糊控制仿真 MATLAB
设计目标说明 一、设计的目的: 1. 通过本次设计,进一步了解模糊控制的基本原理、模糊模型的建立和模糊控制器的设计过程。 2. 提高学生有关控制系统的程序设计能力。 3. 熟悉Matlab 语言以及在智能控制设计中的应用。 二、设计要求: 图1 模糊控制系统Simulink 仿真模型图 1、用Matlab 中的Simulink 工具箱,组成一个模糊控制系统。任意带模糊控制器的系统均可,例如一简单二阶加纯滞后系统(图1 所示)为,传递函数12()(1)(1) d s f f Ke G s T s T s τ-=++。其 中各参数分别为1240,10,60,2f f d K T T τ====。 2、采用模糊控制算法,设计出能跟踪给定输入的模糊控制器,对被控系统进行仿真,绘制出系统的阶跃响应曲线。 3、改变模糊控制器中模糊变量的隶属度函数,分析隶属度函数和模糊控制规则对模糊控制效果的影响。比较那种情况下的控制效果较好。 4、给系统加上扰动,观察此时的阶跃响应曲线,看系统是否仍然稳定,并与无扰动情况下的阶跃响应曲线进行比较。并比较模糊控制和PID 控制的鲁棒性。 5、改变系统的参数,了解模糊控制在系统参数发生变化时的控制效果。并与PID 控制器作用下系统参数发生变化时的控制效果进行比较,思考模糊控制相对于传统控制的优点。
直流电机双闭环调速系统设计要点
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ 目录 1 绪论 (1) 1.1课题研究背景 (1) 1.2研究双闭环直流调速系统的目的和意义 (1) 2 直流电机双闭环调速系统 (3) 2.1直流电动机的起动与调速 (3) 2.2直流调速系统的性能指标 (3) 2.2.1静态性能指标 (3) 2.2.2动态的性能指标 (4) 2.3双闭环直流调速系统的组成 (6) 3 双闭环直流调速系统的设计 (8) 3.1电流调节器的设计 (8) 3.2转速调节器的设计 (10) 3.3闭环动态结构框图设计 (12) 3.4设计实例 (12) 3.4.1设计电流调节器 (13) 3.4.2设计转速调节器 (15) 4.Matlab仿真 (17) 4.1仿真结果分析 (19) 5 结论 (20) 参考文献 (21)
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊1 绪论 1.1课题研究背景 直流调速是现代电力拖动自动控制系统中发展较早的技术。就目前而言,直流调速系统仍然是自动调速系统的主要形式,电机自动控制系统广泛应用于机械,钢铁,矿山,冶金,化工,石油,纺织,军工等行业。这些行业中绝大部分生产机械都采用电动机作原动机。有效地控制电机,提高其运行性能,对国民经济具有十分重要的现实意义。 以上等等需要高性能调速的场合得到广泛的应用。然而传统双闭环直流电动机调速系统多数采用结构比较简单、性能相对稳定的常规PID控制技术,在实际的拖动控制系统中,由于电机本身及拖动负载的参数(如转动惯量)并不像模型那样保持不变,而是在某些具体场合会随工况发生改变;与此同时,电机作为被控对象是非线性的,很多拖动负载含有间隙或弹性等非线性的因素。因此被控制对象的参数发生改变或非线性特性,使得线性的常参数的PID控制器往往顾此失彼,不能使得系统在各种工况下都保持与设计时一致的性能指标,常常使控制系统的鲁棒性较差,尤其对模型参数变化范围大且具的非线性环节较强的系统,常规PID调节器就很难满足精度高、响应快的控制指标,往往不能有效克服模型参数变化范围大及非线性因素的影响。 1.2研究双闭环直流调速系统的目的和意义 双闭环直流调速系统是性能很好,应用最广的直流调速系统。采用该系统可获得优良的静、动态调速特性。此系统的控制规律,性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础。 20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。尽管近年来直流电动机不断受到交流电动机及其它电动机的挑战,但至今直流电动机仍然是大多数变速运动控制和闭环位置伺服控制首选。因为它具有良好的线性特性,优异的控制性能,高效率等优点。直流调速仍然是目前最可靠,精度最高的调速方法。 通过对转速、电流双闭环直流调速系统的了解,使我们能够更好的掌握调速系统的基本理论及相关内容,在对其各种性能加深了解的同时,能够发现其缺陷之处,通过对该系统不足之处的完善,可提高该系统的性能,使其能够适用于各种工作场合,提高其使用效率。并以此为基础,再对交流调速系统进行研究,最终掌握各种交、直流调速系统的原理,使之能够应用于国民经济各个
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
基于matlab的模糊控制器的设计与仿真
基于MATLAB的模糊控制器的设计与仿真 摘要:本文对模糊控制器进行了主要介绍。提出了一种模糊控制器的设计与仿真的实现方法,该方法利用MA TLB模糊控制工具箱中模糊控制器的控制规则和隶属度函数,建立模型,并进行模糊控制器设计与仿真。 关键词:模糊控制,隶属度函数,仿真,MA TLAB 1 引言 模糊控制是一种特别适用于模拟专家对数学模型未知的较复杂系统的控制,是一种对模型要求不高但又有良好控制效果的控制新策略。与经典控制和现代控制相比,模糊控制器的主要优点是它不需要建立精确的数学模型。因此,对一些无法建立数学模型或难以建立精确数学模型的被控对象,采用模糊控制方法,往往能获得较满意的控制效果。 模糊控制器的设计比一般的经典控制器如PID控制器要复杂,但如果借助MATLAB则系统动态特性良好并有较高的稳态控制精度,可提高模糊控制器的设计效率。本文在MATLAB环境下针对某个控制环节对模糊控制系统进行了设计与仿真。 2 模糊控制器简介 模糊控制器是一种以模糊集合论,模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。本章着重介绍模糊控制的基本思想,模糊控制的基本原理,模糊控制器的基本设计原理和模糊控制系统的性能分析。 随着科学技术的飞速发展,在那些复杂的,多因素影响的严重非线性、不确定性、多变性的大系统中,传统的控制理论和控制方法越来越显示出局限性。长期以来,人们期望以人类思维的控制方案为基础,创造出一种能反映人类经验的控制过程知识,并可以达到控制目的,能够利用某种形式表现出来。而且这种形式既能够取代那种精密、反复、有错误倾向的模型建造过程,又能避免精密的估计模型方程中各种方程的过程。同时还很容易被实现的,简单而灵活的控制方式。于是模糊控制理论极其技术应运而生。 3 模糊控制的特点 模糊控制是以模仿人类人工控制特点而提出的,虽然带有一定的模糊性和主观性,但往往是简单易行,而且是行之有效的。模糊控制的任务正是要用计算机来模拟这种人的思维和决策方式,对这些复杂的生产过程进行控制和操作。所以,模糊控制有以下特点: 1)模糊控制的计算方法虽然是运用模糊集理论进行的模糊算法,但最后得到的控制规律是确定
双闭环设计
双闭环直流电机调速系统设计 目录 一、设计任务与要求 (2) 1、设计题目及技术指标 (2) 1.1 设计题目 (2) 1.2 技术指标 (3) 2、系统总方案设计 (3) 2.1 逻辑无环流工作原理 (3) 2.2 系统设计分析 (4) 二、各个器件参数的设计 (5) 1、参数计算 (5) 1.1、变压器参数计算 (5) 1.2 平波电抗器参数计算 (5) 1.3可控晶闸管参数计算 (6) 2、双闭环调速系统 (6) 2.1、输出限幅 (6) 2.2、双闭环直流调速系统设计 (7) 2.3、电流调节器的设计 (10) 2.4转速调节器的设计 (11) 总结体会 (13) 参考文献 (14)
摘要 转速、电流双闭环控制直流调速系统是性能很好、应用最广的直流调速系统。根据晶闸管的特性,通过调节控制角α大小来调节电压。基于设计题目,直流电动机调速控制器选用了转速、电流双闭环调速控制电路。在设计中调速系统的主电路采用了三相全控桥整流电路来供电。本文首先确定整个设计的方案和框图。然后确定主电路的结构形式和各元部件的设计,同时对其参数的计算,包括整流变压器、晶闸管、电抗器和保护电路的参数计算。接着驱动电路的设计包括触发电路和脉冲变压器的设计。最后,即本文的重点设计直流电动机调速控制器电路,本文采用转速、电流双闭环直流调速系统为对象来设计直流电动机调速控制器。为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,二者之间实行嵌套联接。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称做外环。这就形成了转速、电流双闭环调速系统。先确定其结构形式和设计各元部件,并对其参数的计算,包括给定电压、转速调节器、电流调节器、检测电路、触发电路和稳压电路的参数计算,最后画出了调速控制电路电气原理图。 关键词: 双闭环; 转速调节器;电流调节器 一、设计任务与要求 1、 设计题目及技术指标 1.1 设计题目 为某生产机械设计一个调速范围宽、起制动性能好的直流调速系统,且拟定该系统为晶闸管-电动机系统。已知系统中直流电动机主要数据如下: 额定功率kW P N 60=;额定电压V U N 220=; 额定电流A I N 220=;额定转速 min /1000r n N = ; 电枢电阻 Ω =05.0a R ;转动惯量 2 2 80m N GD ?= 电枢回路总电阻Ω=5.0R 电网供电电压为三相380V ;电网电压波动为+5% -- -10%;速度检测采用测速电机;控制系统电源电压为V 15± 测速发电机的选择