(完整word版)数字图像处理图像编码
数字图像处理上机实习报告(DIP4----DIP7)
学生姓名:杜坤
班级:071123
学号:20121003699
指导老师:傅华明
DIP-4 图像编码
一.题目要求
对图实施费诺-香农编码和解码,计算图像熵,平均码长和冗余度。
二.算法设计
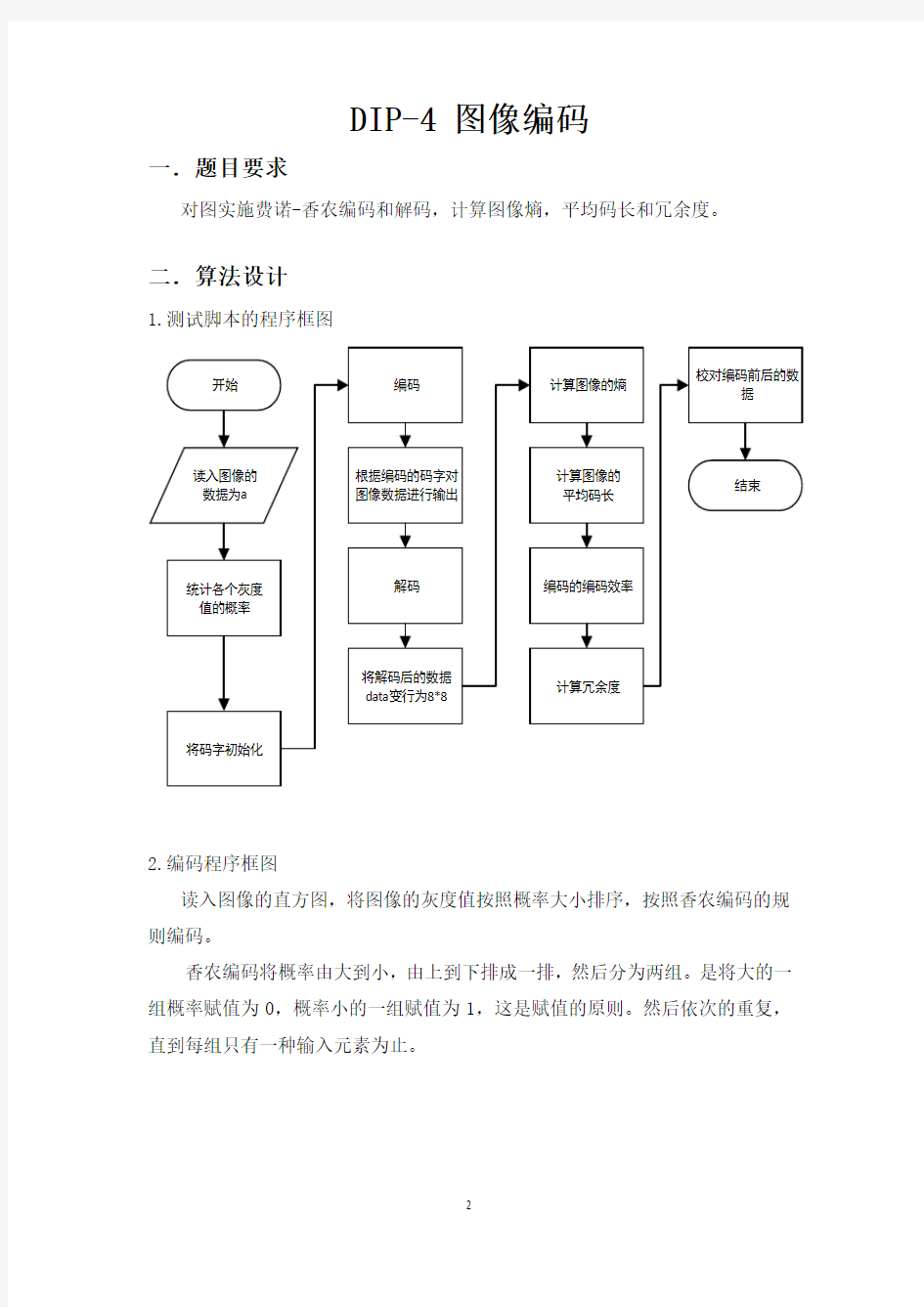
1.测试脚本的程序框图
2.编码程序框图
读入图像的直方图,将图像的灰度值按照概率大小排序,按照香农编码的规则编码。
香农编码将概率由大到小,由上到下排成一排,然后分为两组。是将大的一组概率赋值为0,概率小的一组赋值为1,这是赋值的原则。然后依次的重复,直到每组只有一种输入元素为止。
3.解码程序框图
三.实现代码
1.脚本文件
clear all
load mat
p = impr(a); %统计概率
code = FanoCodeInit(p); %Fano编码初始化
code = FanoEncoder(code);%Fano编码
outstream = FanoCodeStream(a,code); %输出
data = FanoDecoder(outstream,code);%解码
data = reshape(data,8,8); %恢复8*8的形状
data = data'; %转置
I = abs(p.*log2(p));
disp('图像的熵为:');
H = sum(I(:)) %计算熵
disp('图像的平局码长为:')
B = FanoCodeLength(code); %求平均长度
disp('编码冗余度为:');
r = B/H - 1 %求冗余
disp('编码效率为:')
e = H/B %求编码效率
if isequal(a,data)
msgbox('解码后的数据和输入的数据完全吻合');
end
2.统计灰度的概率
function [p]= impr(f)
%概率统计
[m,n] = size(f);
graymax = max(f(:)); %找出灰度最大值,划定统计范围p = zeros(1,graymax + 1);
for i = 1:m
for j = 1:n
x = f(i,j) + 1;
p(x) = p(x) + 1;
end
end
p = p/(m*n);
End
3.码字的初始化
function [code] = FanoCodeInit(p)
%FanoShano码字初始化
[m,n] = size(p);
for i = 1:n
code(i).gray = i - 1;
code(i).p = p(i);
code(i).str = '';
end
%冒泡法排序
for i = 1:n
for j = 1:n-i
if code(j).p > code(j+1).p
temp = code(j);
code(j) = code(j+1);
code(j+1) = temp;
end
end
end
end
4.编码
function [pin] = FanoEncoder(pin)
%FanoShano编码
[m,n] = size(pin);
flag = 1;
while (flag)
start = 1;
stop = 1;
temp = pin(1);
for i = 1:n-1
if isequal(temp.str,pin(i+1).str)
stop = stop + 1;
elseif stop == start
start = i + 1;
stop = start;
temp = pin(i+1);
else
break;
end
end
if stop ~= start
pin = FanoCodeCat(pin,start,stop);
else
if i == n-1
flag = 0; %退出while(flag)的循环
end
end
end
end
5.输出码流
function [outstream] = FanoCodeStream(data,code) [m,n] = size(data);
len = length(code);
outstream = '';
for i = 1:m
for j = 1:n
for k = 1:len
if code(k).gray == data(i,j);
outstream = [outstream,code(k).str];
break;
end
end
end
end
end
6.解码
function [data] = FanoDecoder(instream,code)
len = length(instream);
str = '';gray = 0;flag = 0;data = 0;
for i = 1:len
[gray,flag] = LookUp(code,[str,instream(i)]); if flag
dlen = length(data);
data(dlen+1) = gray;
str = '';
else
str = [str,instream(i)];
end
end
dlen = length(data);
data = data(2:dlen);
end
7.搜索码字
function [data,flag] = LookUp(code,str)
len = length(code);
flag = 0;
data = 0;
for i = 1:len
if isequal(str,code(i).str)
data = code(i).gray;
flag = 1;
break;
end
end
end
8.获得平均码长
function [len_ave] = FanoCodeLength(code)
len = length(code);
len_ave = 0;
for i = 1:len
len_ave = len_ave + code(i).p*length(code(i).str);
end
end
四.结果分析
经过检验之后可以看出,将图像数据进行编码,然后再解码得到的数据和原图像数据完全一致,说明此程序成功编码解码,达到了题目的要求。
算法改进:在编码的时候可以直接将灰度值作为码字的下标,提高编码的效率。
DIP-5 图像分割
一.题目要求
对下图施加高斯噪声,采用LoG 算子对含噪声的图象实施边缘分割,找出该图象的最佳边缘。
二.算法设计
在对图像处理的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些感兴趣的部分常称为目标或对象,它们一般对应图像中特定的、具有独特性质的区域。图像分割是指根据灰度、彩色、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些特征在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同,即在一幅图像中把目标从背景中分离出来,以便于进一步处理。图像分割就是指把图像分成互不重叠的区域并提取出感兴趣目标的技术。像的分割有很多种类,边缘分割也有很多种类,LoG 算子是其中一类。
由于在成像时,一个给定像素所对应的场景点,它的周围点对该点的贡献的光强大小呈正态分布,所以平滑函数应能反映不同远近的周围点对给定像素具有不同的平滑作用,因此,平滑函数采用正态分布的高斯函数,即
式中,s 是方差。 用h(x ,y)对图像f(x ,y)的平滑可表示为
g(x ,y)=h(x ,y)*f(x ,y)
如果令r 是离原点的径向距离,即r2=x2+y2,转换,然后对图像g(x ,y)采用拉普拉斯算子进行边缘检测,可得
)
,(*),(),(*e )],(*),([),(2242
2
222
2y x f y x h y x f r y x f y x h y x g r ?=???
?
??--=?=?-
σσσ
2
222e
),(σ
y x y x h +-
=
上式中的h2
?称为高斯—拉普拉斯滤波(Laplacian of Gaussian,LoG)算子,也称为“墨西哥草帽”。它是一个轴对称函数,各向同性,它的一个轴截面如图所示。
由图可见,这个函数在r=±s处有过零点,在|r|
?的平滑性质能减少噪声的影响,所以当边缘模糊或噪声较大时,正因为h2
?检测过零点能提供较可靠的边缘位置。在该算子中,s的选择很重要,利用h2
s小时边缘位置精度高,但边缘细节变化多;s大时平滑作用大,但细节损失大,边缘点定位精度低。应根据噪声水平和边缘点定位精度要求适当选取s。 LoG 算子用到的卷积模板一般较大,不过这些模板可以分解为一维卷积来快速计算。通过判断零交叉点及其两侧像素符号的变化来确定边缘点。边缘点两侧的二阶微分是异号的,且正号对应边像点的暗侧,负号对应边像点的亮侧,两侧的符号指示着边缘的起伏走向。
三.实现代码
1.主函数
clc;
i = imread('D:\matlab2011\work\p5-03.tif');
subplot(121);imshow(i);title('原图像');
b=log_edge(i);
subplot(122);imshow(b);title('原图像');
2.LoG算子提取边缘点函数
%下面的代码可以实现LoG算子提取边缘点的功能
function e=log_edge(a)
%该函数实现LoG算子提取边缘点
%输入为图像a,输出为边缘图像e
[m,n]=size(a);
e=repmat(logical(uint8(0)),m,n);
sigma=2;
%产生同样大小的边缘图像e,初始化为0
rr=2:m-1;cc=2:n-1;
fsize=ceil(sigma*3)*2+1;
%选择点数为奇数的滤波器的尺寸fsize>6*sigma;
op=fspecial('log',fsize,sigma);
%产生LoG滤波器
op=op-sum(op(:))/prod(size(op));
%将LoG滤波器的均值变为0
b=filter2(op,a);
%利用LoG算子对图像滤波
thresh=.75*mean2(abs(b(rr,cc)));
%设置过零检测的门限
%寻找滤波后的过零点:+ -和- +表示水平方向从左到右和从右到左过零
%[+ -]'和[- +]'表示垂直方向从上到下和从下到上过零
%这里我们选择边缘点为值为负的点
[rx,cx]=find(b(rr,cc)<0&b(rr,cc+1)>0
&abs(b(rr,cc)-b(rr,cc+1))>thresh); %[- +]的情况
e((rx+1)+cx*m)=1;
[rx,cx]=find(b(rr,cc-1)>0&b(rr,cc)<0
&abs(b(rr,cc-1)-b(rr,cc))>thresh); %[+ -]的情况
e((rx+1)+cx*m)=1;
[rx,cx]=find(b(rr,cc)<0&b(rr+1,cc)>0&abs(b(rr,cc)-b(rr+1,cc))>thresh) ; %[- +]'的情况
e((rx+1)+cx*m)=1;
[rx,cx]=find(b(rr-1,cc)>0&b(rr,cc)<0
&abs(b(rr-1,cc)-b(rr,cc))>thresh); %[+ -]'的情况
e((rx+1)+cx*m)=1;
%某些情况下LoG滤波结果可能正好为0,下面考虑这种情况:
[rz,cz]=find(b(rr,cc)==0);
if~isempty(rz)
%寻找滤波后的过零
%+0-和-0+表示水平方向从左到右和从右到左过零
%[+0-]'和[-0+]'表示垂直方向从上到下和从下到上过零
%边缘正好位于滤波值为零点上
zero=(rz+1)+cz*m; %零点的线性坐标
zz=find(b(zero-1)<0&b(zero+1)>0
&abs(b(zero-1)-b(zero+1))>2*thresh); %[-0+]'情况
e(zero(zz))=1;
zz=find(b(zero-1)>0&b(zero+1)<0&abs(b(zero-1)-b(zero+1))>2*thresh); %[+0-]'情况
e(zero(zz))=1;
zz=find(b(zero-m)<0&b(zero+m)>0
&abs(b(zero-m)-b(zero+m))>2*thresh); %[-0+]情况
e(zero(zz))=1;
zz=find(b(zero-m)>0&b(zero+m)<0
&abs(b(zero-m)-b(zero+m))>2*thresh); %[+0-]情况
e(zero(zz))=1;
end
四.结果分析
用LoG算子进行边缘检测的结果如图。Laplace算子对通过图像进行操作实现边缘检测的时,对离散点和噪声比较敏感。于是,首先对图像进行高斯暖卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测,由上图可见有较好提取边缘的效果。
DIP-6 图像描述
一.题目要求
对下图象提取多边形对象的边缘,根据傅氏描述算子重建该图多边形的边界
二.算法设计
傅立叶描述子(Fourier Descriptor,简称FD)常用来表示单封闭曲线的形状特征,其基本思想是将目标轮廓曲线建模成一维序列,对该序列进行一维的傅立叶变换,从而获得一系列的傅立叶系数,用这些系数对该目标轮廓进行描述。傅立叶描述子方法有一系列优点,如:计算原理简单,描述清晰,具有由粗及精的特性等。计算原理简单可以使得特征提取更加稳定,因为在计算的过程中,无须设置大量控制参数就可以获得结果,计算的一致性好。傅立叶描述子具有明确的物理或几何意义,它比某些特征描述子(如Hu 不变矩)更具直观性。此外,由于任何一个序列经傅立叶变换后,其能量主要集中于少数几个低频傅立叶系数上,因此采用极少的傅立叶系数就可以描绘该序列特征。同时,随着傅立叶系数的增多,该序列的细节特征得以更好地描述。因此,傅立叶描述子对目标轮廓有非常好的由粗及精的描述能力。一个傅立叶描述子的构建包括两步:首先,定义一种好的表示(representation)方法对轮廓曲线进行描述;然后,采用傅立叶
理论对该曲线进行变换。不同的曲线表示方法有不同的特性,一个好的表示方法 应该使最终获得的傅立叶描述子具有尺度、旋转、平移不变性及起始点的无关性。
傅立叶描述子,是物体形状边界曲线的傅立叶变换系数,是物体边界曲线信号的频域分析结果。它是一种描述不受起始点移动尺寸变化及旋转影响的曲线的方法。傅立叶描述子的基本思想,是把坐标的序列点看作复数:
()()jy(k)s k s k =+
即x 轴作为实轴,y 轴作为虚轴,边界的性质不变。这种表示方法的优点,是将 一个二维问题简化成一个一维问题。对s(k)的傅立叶变换为:
1
2/0()()N j uk N k a u s k e π--==∑
傅立叶描述子序列{()}a u 反映了原曲线的形状特征,同时,由于傅立叶变换具有能 量集中性,因此,少量的傅立叶描述子就可以重构出原曲线。
三.实现代码
1.主函数
%图像傅里叶算子边界描述 %生成图像边界矩阵 clc;
r=zeros(15,15); %构造15*15的0矩阵
r(3,8:13)=1; %按要求构造“R”型图像
r(4,7)=1; r(4,13)=1;
r(5,6)=1; r(5,13)=1;
r(6,3:5)=1; r(6,13)=1;
r(7,3)=1; r(7,13)=1;
r(8,3)=1; r(8,13)=1;
r(9,3)=1; r(9,13)=1;
r(10,3)=1; r(10,13)=1;
r(11,3)=1; r(11,12)=1;
r(12,3)=1; r(12,11)=1;
r(13,3:10)=1;
subplot(121);
imshow(r);
title('构建的图像边界');
%主函数
%图像傅里叶算子边界描述
i=1;
for m=1:15
for n=1:15
if r(m,n)==1 %将边界坐标存入S矩阵 s(i,1)=m;
s(i,2)=n;
i=i+1;
end
end
end
z=frdescp(s);
%图像傅里叶算子边界逆描述
z34=ifrdescp(z,34);
z34=uint8(z34);
I=zeros(15,15);
for k=1:34
I(z34(k,1),z34(k,2))=1;
k=k+1;
end
subplot(122);
imshow(I);
title('34个描绘子重构的图像');
2.Frdescp函数
功能:计算边界的傅里叶描绘子s
%傅里叶边界描述算子生成函数
function z=frdescp(s)
[np,nc]=size(s);
if nc~=2
error('S must be of size (np,2)'); %必须为2列的矩阵
end
if np/2~=round(np/2); %若点数不是偶数,则补一个点
s(end+1,:)=s(end,:);
np=np+1;
end
x=0:(np-1);
m=((-1).^x)';
s(:,1)=m.*s(:,1);
s(:,2)=m.*s(:,2);
s=s(:,1)+i*s(:,2);
z=fft(s);
3.Ifrdescp函数
功能:给定一组傅里叶描绘子,该函数可用给定数量的描绘子计算其逆变换,以产生一条封闭的空间曲线
%傅里叶边界描述逆算子函数
function s=ifrdescp(z,nd)
np=length(z);
if nargin==1|| nd>np;
nd=np;
end
x=0:(np-1);
m=((-1).^x)';
d=round((np-nd)/2);
z(1:d)=0;
z(np-d+1:np)=0;
zz=ifft(z);
s(:,1)=real(zz);
s(:,2)=imag(zz);
s(:,1)=m.*s(:,1);
s(:,2)=m.*s(:,2);
四.结果分析
1.34个描绘子重构的图像
2.32个描绘子重构的图像
3.29个描绘子重构的图像
4.25个描绘子重构的图像
以上为用34,,3,29,25个描绘子重建的图像。使用34个描绘子重建的图像显示的边界与原图像相同,随着所用描述子减少,出现失真。本图像较简单,若是复杂图像,随着描述子减少重建图像的变化趋势为:1.显示稍微平滑一些的边界,但产生的形状与原图像十分接近。2.仅保留了边界的主要特征。3.丢失边界的主要特征,出现失真。
描绘算子应该尽可能的对平移、旋转和缩放等改变不敏感。当结果取决于所处理的点的顺序时,要给它们加一个额外的约束,以便使描绘子对起始点不敏感。傅里叶描绘子虽然对几何变化简介不敏感,但这些参数的变化却与描绘子的简单变化有关。
DIP-7 图像匹配
一.题目要求
选择摸板8,将选定模板与10个图实施匹配运算。如果匹配成功,请说明图号和摸板左上角像素在匹配图象所在的坐标。
二.算法分析
设检测对象的模板为t(x,y),令其中心与图像f(x,y)中的一个像素(i,j)重合,检测t(x,y)和图像重合部分之间的相似度,对图像中所有的像素都进行这样的操作,根据相似度为最大或者超过某一阈值来确定对象物是否
存在。本题目中则用到的是普通的模式匹配,即对每一幅图像的每一个像素进行一一的核对。
三.实现代码
clear all
g = imread('D:\matlab2011\work\m08.tif');
[gm,gn] = size(g);
f(1).num = imread('D:\matlab2011\work\p7-01.tif');
f(2).num = imread('D:\matlab2011\work\p7-02.tif');
f(3).num = imread('D:\matlab2011\work\p7-03.bmp');
f(4).num = imread('D:\matlab2011\work\p7-04.tif');
f(5).num = imread('D:\matlab2011\work\p7-05.tif');
f(6).num = imread('D:\matlab2011\work\p7-06.tif');
f(7).num = imread('D:\matlab2011\work\p7-07.tif');
f(8).num = imread('D:\matlab2011\work\p7-08.tif');
f(9).num = imread('D:\matlab2011\work\p7-09.tif');
f(10).num = imread('D:\matlab2011\work\p7-10.tif');
for len = 1:10
[fm,fn] = size(f(len).num);
for i = 1:fm-gm
for j = 1:fn-gn
flag = 1;
for k = 1:gm
for t = 1:gn
if g(k,t) ~= f(len).num(i+k,j+t);
flag = 0;
break;
end
end
if ~flag
break;
end
end
if flag
break;
end
end
if flag
break;
(完整版)数字图像处理第三版中文答案解析冈萨雷斯
第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 ()()017 023 02.x .d = 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小2 5327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 610318-?< 2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106 m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(2 2),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定 的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由: ()()()()()[ ]()()[]2 02 02 020********y y x x y y x x e .e y ,x r y ,x i y ,x f -+---+--=?== 一个截面图像见图(a )。如果图像使用k 比特的强度分辨率,然后我们有情况见图(b ),其中()k G 21255+=?。因为眼睛可检测4种灰度突变,因此,k G 22564==?,K= 6。
数字图像处理第二章课后习题及中文版解答
数字图像处理(冈萨雷斯版,第二版)课后习题及解答(部分) Ch 2 2.1使用2.1节提供的背景信息,并采用纯几何方法,如果纸上的打印点离眼睛0.2m 远,估计眼睛能辨别的最小打印点的直径。为了简明起见,假定当在黄斑处的像点变得远比视网膜区域的接收器(锥状体)直径小的时候,视觉系统已经不能检测到该点。进一步假定黄斑可用1.5mm × 1.5mm 的方阵模型化,并且杆状体和锥状体间的空间在该阵列上的均匀分布。 解:对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 ()()220.20.014 d x = 解得x =0.07d 。根据2.1节内容,我们知道:如果把黄斑想象为一个有337000个成像单元的正方形传感器阵列,它转换成一个大小580×580成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm 的一条线上有580个成像单元和579个成像单元间隔。则每个成像单元和成像单元间隔的大小为s =[(1.5 mm)/1159]=1.3×10-6 m 。如果在黄斑上的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说,眼睛不能检测到以下直径的点:x =0.07d<1.3×10-6m ,即d <18.6×10-6 m 。 下图附带解释:因为眼睛对近处的物体聚焦时,肌肉会使晶状体变得较厚,折射能力也相对提高,此时物体离眼睛距离0.2 m ,相对较近。而当晶状体的折射能力由最小变到最大时,晶状体的聚焦中心与视网膜的距离由17 mm 缩小到14 mm ,所以此图中选取14mm(原书图2.3选取的是17 mm)。 图 题2.1 2.2 当在白天进入一个黑暗的剧场时,在能看清并找到空座位时要用一段时间适应,2.1节(视觉感知要素)描述的视觉过程在这种情况下起什么作用? 解:根据人眼的亮度适应性,1)由于户外与剧场亮度差异很大,因此当人进入一个黑暗的剧场时,无法适应如此大的亮度差异,在剧场中什么也看不见;2)人眼不断调节亮度适应范围,逐渐的将视觉亮度中心调整到剧场的亮度范围,因此又可以看见、分清场景中的物体了。
数字图像处理考试
1. 对下列信源符号进行Huffman 编码,并计算其冗余度和压缩率。 符号 a1 a2 a3 a4 a5 a6 概率 0.1 0.4 0.06 0.1 0.04 0.3 原始信源 信源简化 符号 概率 1 2 3 4 a2 0.4 0.4 0.4 0.4 0.6 a6 0.3 0.3 0.3 0.3 0.4 a1 0.1 0.1 0.2 0.3 a4 0.1 0.1 0.1 a3 0.06 0.1 a5 0.04 从最小的信源开始一直到原始的信源 编码的平均长度: 压缩率:13 1.3642.2 R avg n C L ==≈ 冗余度:11110.26691.364D R R C =- =-≈ (0.4)(1)(0.3)(2)(0.1)3(0.1)(4)(0.06)(5)(0.04)(5) 2.2/avg L bit =+++++=()符号
1. 简述灰度分辨率、空间分辨率与图像质量的关系。: 空间分辨率是看原图像转化为数字图像的像素点数,越多图像质量越高;灰度分辨率,即每一个像素点的灰度级数,灰度级越大,图像越清晰. 2. 简述采样和量化的一般原则: 空间坐标的离散化叫做空间采样,而灰度的离散化叫做灰度量化。图像的空间分辨率主要由采样所决定,而图像的幅度分辨率主要由量化所决定。 3. 图像锐化与图像平滑有何区别与联系?: 图象锐化是用于增强边缘,导致高频分量增强,会使图象清晰;图象平滑用于去噪,对图象高频分量即图象边缘会有影响。都属于图象增强,改善图象效果。 4. 伪彩色增强与假彩色增强有何异同点?: 伪彩色增强是对一幅灰度图象经过三种变换得到三幅图象,进行彩色合成得到一幅彩色图像;假彩色增强则是对一幅彩色图像进行处理得到与原图象不同的彩色图像;主要差异在于处理对象不同。 1. 对于椒盐噪声,为什么中值滤波效果比均值滤波效果好?:均值滤波器是一种最常用的线性低通平滑滤波器,可抑制图像中的加性噪声,但同时也使图像变得模糊;中值滤波器是一种最常用的非线性平滑滤波器,可消除图像中孤立的噪声点,又可产生较少的模糊。一般情况下中值滤波的效果要比邻域平均处理的低通滤波效果好,主要特点是滤波后图像中的轮廓比较清晰。因此,滤除图像中的椒盐噪声采用中值滤波。 2.什么是区域?什么是图像分割?:图像分割就是把图像分成若干个特定 的、具有独特性质的区域并提出感兴趣目标的技术和过程。它是由图像处理到图像分析的关键步骤。 3.写出颜色RGB模型转换到HIS模型的变换公式;并说明HSI模型各分 量的含义及取值围对应的颜色信息。书上 4.灰度图像:当点足够小,观察距离足够远时,人眼就不容易分开各个小 点,从而得到比较连续,平滑的灰度图像。 5.GIF格式:GIF格式是一种公用的图像文件格式,它是8位文件格式, 所以最多只能存储256色图像,不支持24位的真彩色图像。GIF文件中的图像数据均经过压缩,采用的压缩算法是改进的LZW算法,所提供的压缩率通常在1:1到1:3之间,当图像中有随机噪声时效果不好
数字图像处理英文原版及翻译
Digital Image Processing and Edge Detection Digital Image Processing Interest in digital image processing methods stems from two principal application areas: improvement of pictorial information for human interpretation; and processing of image data for storage, transmission, and representation for autonomous machine perception. An image may be defined as a two-dimensional function, f(x, y), where x and y are spatial (plane) coordinates, and the amplitude of f at any pair of coordinates (x, y) is called the intensity or gray level of the image at that point. When x, y, and the amplitude values of f are all finite, discrete quantities, we call the image a digital image. The field of digital image processing refers to processing digital images by means of a digital computer. Note that a digital image is composed of a finite number of elements, each of which has a particular location and value. These elements are referred to as picture elements, image elements, pixels, and pixels. Pixel is the term most widely used to denote the elements of a digital image. Vision is the most advanced of our senses, so it is not surprising that images play the single most important role in human perception. However, unlike humans, who are limited to the visual band of the electromagnetic (EM) spec- trum, imaging machines cover almost the entire EM spectrum, ranging from gamma to radio waves. They can operate on images generated by sources that humans are not accustomed to associating with images. These include ultra- sound, electron microscopy, and computer-generated images. Thus, digital image processing encompasses a wide and varied field of applications. There is no general agreement among authors regarding where image processing stops and other related areas, such as image analysis and computer vi- sion, start. Sometimes a distinction is made by defining image processing as a discipline in which both the input and output of a process are images. We believe this to be a limiting and somewhat artificial boundary. For example, under this definition, even the trivial task of computing the average intensity of an image (which yields a
数字图像处理第三版 (Rafael C.Gonzalez著)第三章答案
(a )由2 )(Kr Ae r T s -==,3/2 A Ae KL =-得:) 3/1ln(20=-KL ,20 /0986.1L K = 2 2 0986.1)(r L Ae r T s -== (b )、由 , 4/)1(2 0B e KL =--B 得: )4/3ln(2 0=-KL ,2 0/2877.0L K = )1()(2 2 2877.0r L e B r T s - -== (c )、 逐次查找像素值,如(x ,y )=(0,0)点的f (x ,y )值。若该灰度值的4比特的第0 位是1,则该位置的灰度值全部置1,变为15;否则全部置0,变为0。因此第7位平面[0,7]置0,[7,15]置1,第6位平面[0,3],[4,7]置0,[8,11],[12,15]置15。依次对图像的全部像素进行操作得到第0位平面,若是第i 位平面,则该位置的第i 位值是0还是1,若是1,则全置1,变为15,若是0,则全置0 设像素的总数为n ,是输入图像的强度值,由,rk 对 应sk ,所以,由 和得 由此得知,第二次直方图均衡化处理的结果与第一次直 方图均衡化处理的结果相同,这里我们假设忽略不计四舍五入的误差。
3.11题、由 dw w p z G v z z )()(0 ? = =, ?? ?=<<-5 .0041 5.044)( w w w w z w p { 5 .0021 5.02210 2 2 )()(<<<<+-= = =? z z z z z z z dw w p z G v 令v s =得 所以?? ???=?? ?? ?==- <<+-±<<- -+-±±-±-5.010221 5.0121 )2(25.022 125.01 22 )(r r r r r r v v v G z 3.12题、第k 个点邻域内的局部增强直方图的值为: P r (r k )=n k /n (k=0,1,2,……K-1)。这里n k 是灰度级为r k 的像素个数,n 是邻域内像素的总个数,k 是图像中可能的灰度级总数。假设此邻域从左以一个像素为步长向右移动。这样最左面的列将被删除的同时在后面又产生一个新的列。变化后的直方图则变成 : (k=0,1,2,……K-1) 这里n lk 是灰度级r k 在左面的列出现的次数,n rk 则为在右面出现的次数。 上式也可以改写成: (k=0,1,2,……K-1) 同样的方法也适用于其他邻域的移动: 这里a k 是灰度级r k 在邻域内在移动中被删除的像素数,b k 则是在移动中引入的像素数: (k=0,1,2,…… K-1) 上式等号右边的第一项为0(因为f 中的元素均为常数)。变量 是噪声的简单抽样,它 的方差是。因此 并且我们可以得到。上述过
计算机图形_Digital Image Processing, 2nd ed(数字图像处理(第2版))
Digital Image Processing, 2nd ed(数字图像处理(第2 版)) 数据摘要: DIGITAL IMAGE PROCESSING has been the world-wide leading textbook in its field for more than 30 years. As the 1977 and 1987 editions by Gonzalez and Wintz, and the 1992 edition by Gonzalez and Woods, the present edition was prepared with students and instructors in mind. The material is timely, highly readable, and illustrated with numerous examples of practical significance. All mainstream areas of image processing are covered, including a totally revised introduction and discussion of image fundamentals, image enhancement in the spatial and frequency domains, restoration, color image processing, wavelets, image compression, morphology, segmentation, and image description. Coverage concludes with a discussion on the fundamentals of object recognition. Although the book is completely self-contained, this companion web site provides additional support in the form of review material, answers to selected problems, laboratory project suggestions, and a score of other features. A supplementary instructor's manual is available to instructors who have adopted the book for classroom use.
数字图像处理第三版中文答案--冈萨雷斯
数字图像处理第三版中文答案--冈萨雷斯
第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 ()()017 02302.x .d = 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 6 10318-?<
2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数
数字图像处理第三章答案
3.1 a 为正常数的指数式 e ar -2 对于构造灰度平滑变换函数是非常有 用的。由这个基本函数开始,构造具有下图形状的变换函数。所示的常数是输入参数,并且提出的变换必须包含这些参数的特定形式(为了答案曲线中的L 0不是所要求的参数)。 解:由(a )图所示,设e ar A r T -=2 )(,则 在r=0时,T(r)=A 在r=L 0时,T(r)=A/2 联立,解得L L a 0 693 .00 2 ln 2 2 ≈ = 则C r L C D r T s e K +--==-)1)(()(2 2 由(b )图所示,可以由(a)图翻转得到,所以(b )图的表达式 s=)1()(2 20 693 .0r L B r T e --= (c )图是(b )图沿y 轴平移得到,所以(c )图的表达式 C r L C D r T s e K +--==-)1)(()(2 3.19 (a)在3.6.2节中谈到,分布在图像背景上的孤立的亮和暗的像素团块,当它们小于中值滤波器区域的一半时,经过中值滤波器处理后会被滤除(被其邻值同化)。假定滤波器尺寸为n n ?,n 为奇数,解释这种现象的原因?
(b )考虑一副有不同像素团块的图像,假设在一个团块的所有点都比背景凉或者暗(但不是同时既比背景亮又比背景暗),并且每个团块的尺寸不大于22 n 。试求当n 符合什么条件时,有一个或多个这样的团块像(a )中所说的那样被分离出来? 答:在A 的结论下,我们考虑的团块的像素个数不可能超过2 )1(2 -n , 两个相近的或亮或暗的团块不可能同时出现在相邻的位置。在这个 n n ?的网格里,两个团块的最小距离至少大于)1(2-n ,也就是说至 少在对角线的区域分开跨越(n-1)个像素在对角线上。 3.29 CCD 电视摄像机用于每天24小时,每月30天对同一区域进行长期观测研究。5分钟拍一次数字图像并传送到中心场所。场景的照明,白天为自然光,晚上为人造光,没有无照明的时间,因此摄像机本身并不需要使用任何补偿装置。另外,使用数字技术对图像进行后处理并归一化,这样就使图像与恒定照明是等效的。对此,设计一种方法。可以在实验室内使用希望的任何方法,但要在设计中明确列出所做的所有假设。 答:本题是考虑到范围的照明停留在线性部分的相机的反应范围,
数字图像处理 外文翻译 外文文献 英文文献 数字图像处理
Digital Image Processing 1 Introduction Many operators have been proposed for presenting a connected component n a digital image by a reduced amount of data or simplied shape. In general we have to state that the development, choice and modi_cation of such algorithms in practical applications are domain and task dependent, and there is no \best method". However, it is interesting to note that there are several equivalences between published methods and notions, and characterizing such equivalences or di_erences should be useful to categorize the broad diversity of published methods for skeletonization. Discussing equivalences is a main intention of this report. 1.1 Categories of Methods One class of shape reduction operators is based on distance transforms. A distance skeleton is a subset of points of a given component such that every point of this subset represents the center of a maximal disc (labeled with the radius of this disc) contained in the given component. As an example in this _rst class of operators, this report discusses one method for calculating a distance skeleton using the d4 distance function which is appropriate to digitized pictures. A second class of operators produces median or center lines of the digital object in a non-iterative way. Normally such operators locate critical points _rst, and calculate a speci_ed path through the object by connecting these points. The third class of operators is characterized by iterative thinning. Historically, Listing [10] used already in 1862 the term linear skeleton for the result of a continuous deformation of the frontier of a connected subset of a Euclidean space without changing the connectivity of the original set, until only a set of lines and points remains. Many algorithms in image analysis are based on this general concept of thinning. The goal is a calculation of characteristic properties of digital objects which are not related to size or quantity. Methods should be independent from the position of a set in the plane or space, grid resolution (for digitizing this set) or the shape complexity of the given set. In the literature the term \thinning" is not used
数字图像处理课件(冈萨雷斯第三版)
数字图像处理Digital Image Processing 合肥工业大学理学院 信息与计算科学系 二零零九年
1.1 从图象到图像工程 1.1.1 图象和数字图象 ?什么是图象? 图象(image)是泛指照片、动画等等形成视觉景象的事物。 图象与计算机图形学中的图形的区别是:计算机图形学是从建立数学模型到生成图形,而图象通常是指从外界产生的图形。 客观世界是三维空间,但一般图象是二维的。二维图象在反映三维世界的过程中必然丢失了部分信息。即使是记录下来的信息也可能有失真,甚至于难以识别物体。因此,需要从图象中恢复和重建信息,分析和提取图象的数学模型,以至于形成人们对于图象记录下的事物有正确和深刻的认识。这个过程就成为图象处理过程。
?为什么需要数字图象(digital image )? 普通图象包含的信息量巨大,需要使用计算机对图象进行处理。因此,需要把普通图象转变成计算机能处理的数字图象。现在的数码相机可以直接地把视觉图象变成数字图象。数字图象类似于光栅图形,由有限行和有限列组成。 每个基本单元叫做一个象素(pixel)。三维图象的象素又叫做体素(voxel)。通常的二维数字图像是一个矩型,可以用一个二维数组I(x,y) 来表示,其中x,y是二维空间中的某坐标系的坐标,I(x,y)表示图像在该点处的灰度值等性质。彩色可以是红绿蓝三个单色的一定灰度值的合成。一般来说,这些坐标和灰度值是实数,不仅依赖于坐标系的选取,而且依赖于灰度值的度量单位。但是,数字计算机只可能表示有限字长的有限个数字。所以必须把灰度值离散化。简单地说,数字图象等同于一个整数值的有限矩阵。数字图像是数字图像处理和分析的对象。
冈萨雷斯_数字图像处理第3版第4章的习题.doc
4.16 证明连续和离散二维傅里叶变换都是平移和旋转不变的。 首先列出平移和旋转性质: 002(//)00(,)(,)j u x M v y N f x y e F u u v v π+?-- (4.6-3) 002(//)00(,)(,)j x r M y v N f x x y y F u v e π-+--? (4.6-4) 旋转性质: cos ,sin ,cos ,sin x r y r u v θθω?ω?==== 00(,)(,)f r F θθω??+?+ (4.6-5) 证明:由式(4.5-15)得: 由式(4.5-16)得: 依次类推证明其它项。 4.17 由习题4.3可以推出1(,)u v δ?和(,)1t z δ?。使用前一个性质和表4.3中的平移性质证明连续函数00(,)cos(22)f t z A u t v z ππ=+的傅里叶变换是 0000(,)[(,)(,)]2 A F u v u u v v u u v v δδ= +++-- 证明:
000000002()2()002()2()2() 2()2()2()2((,)(,)cos(22)[]222j ut vz j ut vz j u t v z j u t v z j ut vz j u t v z j u t v z j ut vz j u F u v f t z e dtdz A u t v z e dtdz A e e e dtdz A A e e dtdz e e πππππππππππ∞∞ -+-∞-∞ ∞ ∞ -+-∞-∞ ∞∞+-+-+-∞-∞ ∞∞+-+-+--∞-∞==+= +=+? ??? ????) 00000000(,)(,)22[(,)(,)]2t vz dtdz A A u u v v u u v v A u u v v u u v v δδδδ∞∞+-∞-∞=--+++=--+++?? 4.18 证明离散函数(,)1f x y =的DFT 是 1,0 {1}(,)0,u v u v δ==??==? ?其它 证明:离散傅里叶变换 11 2(//)00(,)(,)M N j ux M vy N x y F u v f x y e π---+===∑∑ 11 2(//) 00 11 2(//) 00 {1}M N j ux M vy N x y M N j ux M vy N x y e e ππ---+==---+==?==∑∑∑∑ 如果0u v ==,{1}1?=,否则: 11 00{1}{cos[2(//)]sin[2(//)]}M N x y ux M vy N j ux M vy N ππ--==?=+-+∑∑ 考虑实部,11 00 {1}cos[2(//)]M N x y ux M vy N π--==?=+∑∑,cos[2(//)]ux M vy N π+的值介于 [-1, 1],可以想象,11 00 {1}cos[2(//)]0M N x y ux M vy N π--==?=+=∑∑,虚部相同,所以 1,0 {1}(,)0,u v u v δ==??==?? 其它 4.19 证明离散函数00cos(22)u x v y ππ+的DFT 是 00001 (,)[(,)(,)]2 F u v u Mu v Nv u Mu v Nv δδ=+++--
数字图像处理第三版中文答案冈萨雷斯
如对您有帮助,请购买打赏,谢谢您! 第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小2 5327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 610318-?< 2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由: 一个截面图像见图(a )。如果图像使用k 比特的强度分辨率,然后我们有情况见图(b ),其中()k G 21255+=?。因为眼睛可检测4种灰度突变,因此,k G 22564==?,K= 6。也就是说,k 2小于64的话,会出现可见的伪轮廓。 2.9
数字图像处理外文翻译参考文献
数字图像处理外文翻译参考文献 (文档含中英文对照即英文原文和中文翻译) 原文: Application Of Digital Image Processing In The Measurement Of Casting Surface Roughness Ahstract- This paper presents a surface image acquisition system based on digital image processing technology. The image acquired by CCD is pre-processed through the procedure of image editing, image equalization, the image binary conversation and feature parameters extraction to achieve casting surface roughness measurement. The three-dimensional evaluation method is taken to obtain the evaluation parameters and the casting surface roughness based on feature parameters extraction. An automatic detection interface of casting surface roughness based on MA TLAB is compiled which can provide a solid foundation for the online and fast detection of casting surface roughness based on image processing technology.
23887 《数字图像处理(第3版)》习题解答(上传)(1)
胡学龙编著 《数字图像处理(第 3 版)》 思考题与习题参考答案 目录 第1章概述 (1) 第2章图像处理基本知识 (4) 第3章图像的数字化与显示 (7) 第4章图像变换与二维数字滤波 (10) 第5章图像编码与压缩 (16) 第6章图像增强 (20) 第7章图像复原 (25) 第8章图像分割 (27) 第9章数学形态学及其应用 (31) 第10章彩色图像处理 (32)
第1章概述 1.1连续图像和数字图像如何相互转换? 答:数字图像将图像看成是许多大小相同、形状一致的像素组成。这样,数字图像可以 用二维矩阵表示。将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像 (连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。图像的数字 化包括离散和量化两个主要步骤。在空间将连续坐标过程称为离散化,而进一步将图像的幅 度值(可能是灰度或色彩)整数化的过程称为量化。 1.2采用数字图像处理有何优点? 答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点: 1.具有数字信号处理技术共有的特点。(1)处理精度高。(2)重现性能好。(3)灵活性高。 2.数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。 3.数字图像处理技术适用面宽。 4.数字图像处理技术综合性强。 1.3数字图像处理主要包括哪些研究内容? 答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、 编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的 图像。 1.4 说出图像、视频(video)、图形(drawing)及动画(animation)等视觉信息之间 的联系和区别。 答:图像是用成像技术形成的静态画面;视频用摄像技术获取动态连续画面,每一帧可 以看成是静态的图像。图形是人工或计算机生成的图案,而动画则是通过把人物的表情、动 作、变化等分解后画成许多动作瞬间的画幅,再用摄影机连续拍摄成一系列画面,给视觉造 成连续变化的图画。视频和动画都利用了视觉暂留原理。 1.5如何在你的显示器上观测图像的像素?1台笔记本的屏幕分辨率为1366×768,长宽 比例是4:3、16:9还是16:10?屏幕分辨率(以像素每英寸(DPI)为单位)是多少?选择一 个高分辨率图像、一个低分辨率图像,比较分别观察到像素时图像的放大倍数的差异。 答:可先拷屏,按照图 1.2放大局部图像的方法观测图像。屏幕分辨率为1366×768,表 示宽高比为 1.7786:1,而4:3 = 1.3333:1,16:9 = 1.7778:1,16:10 = 1.6:1。可见,此屏幕的宽高 比最接近16:9。 1.6如何在你的计算机上查看图像文件的各种属性? 答:在Windows操作系统下,鼠标指针指向文件名,可看到图像文件的“项目类型”、标记”、“分级”、“尺寸”、“大小”和“标题”属性(图 1.6a)。右击图像文件名,单击弹出菜单的“属性”命令,可以看到“常规”和“详细信息”两个标签,其中“常规”标签指出文件 名、存放“位置”、“时间”、文件“属性”等信息。“详细信息”指出“说明”、“来源”、“图像”、“照相机”、“高级照片”、“文件”等信息。
数字图像处理第三版 (Rafael C.Gonzalez著)第六章答案
第六章 6.1 给出用于产生图6.5中标为“日光”的点的红光、绿光、蓝光的百分比。 从图中可知,x=0.31,y=0.32,由x+y+z=1可得z=0.37,这是三色值系数。我们感兴趣的是三色值XYZ。由他们的变换公式:x = X/(X+Y+Z),y=Y/(X/Y/Z),z=Z/(X/Y/Z),可知他们的比例是相同的,故可得:X=0.31,Y=0.32,Y=0.37 6.2 用c 表示给定的颜色,并且给出它的坐标,用(x0,y0)表示,c 和c1之间的距离以及c1和c2的距离分别为: c1占c的百分比表示为: c2的百分比用p2表示:p2=100-p1,由上面的等式我们知道,作为例子,当c=c1时,那么d(c,c1)=0,并且p1=100%,p2=0%,同样当d(c,c1)=d(c1,c2)时,p1=0%,p2=100%,从它们简单的关系中可以容易地得出它们的值。 6.5
在中心点有R/2+ B/2+G= R+G+B /2 + G /2=midgray+G/2,由于增加了灰色分量和强度使人们看起来像纯绿色。 6.7 在每幅12比特图像中有4096212=种可能值。对于灰度色彩,所有的RGB 分量必须相等,所以有4096种不同的灰度。 6.8 (a )R 图像中的所有像素值都是255。在G 图像中,第一列全是0,第二列全是1,最后一列全由255组成。在B 图像中,第一行全为255,第二行全为254,直到最后一行全为0。 (b )(令坐标轴编号同书中图6.7(RGB 彩色立方体示意图)相同。)则:(0,0,0)=白色,(1,1,1)=黑色,(1,0,0)=青色,(1,1,0)=蓝色,(1,0,1)=绿色,(0,1,1)=红色,(0,0,1)=黄色,(0,1,0)=深红色。 (c)不包括黑点和白点是饱和的。在包含黑点或者白点时,饱和度会下降。 6.10 从式(6.5-5)的RGB 亮度映射函数推导出式(6.5-6)的CMY 亮度映射函数。 i i ks s = (i=1,2,3) (6.5-5) )1(k ks s i i -+= (i=1,2,3) (6.5-6) 由公式???? ??????-=????????? ?B G R Y M C 1可知,CMY 图像中的每个分量都是响应RGB 图像单一分量的函数。C 是R 的函数,M 是G 的函数,Y 是B 的函数。为清楚起见,我们使用素数标示CMY 分量。有公式 (i=1,2,3)得,)3,2,1(==i ks s i i (对应RGB 分量),并且有公