电流环调节器设计过程

电流环PID 调节器设计大致流程
以下设计过程主要参考文献[1],首先给出永磁同步电机参数表如下:
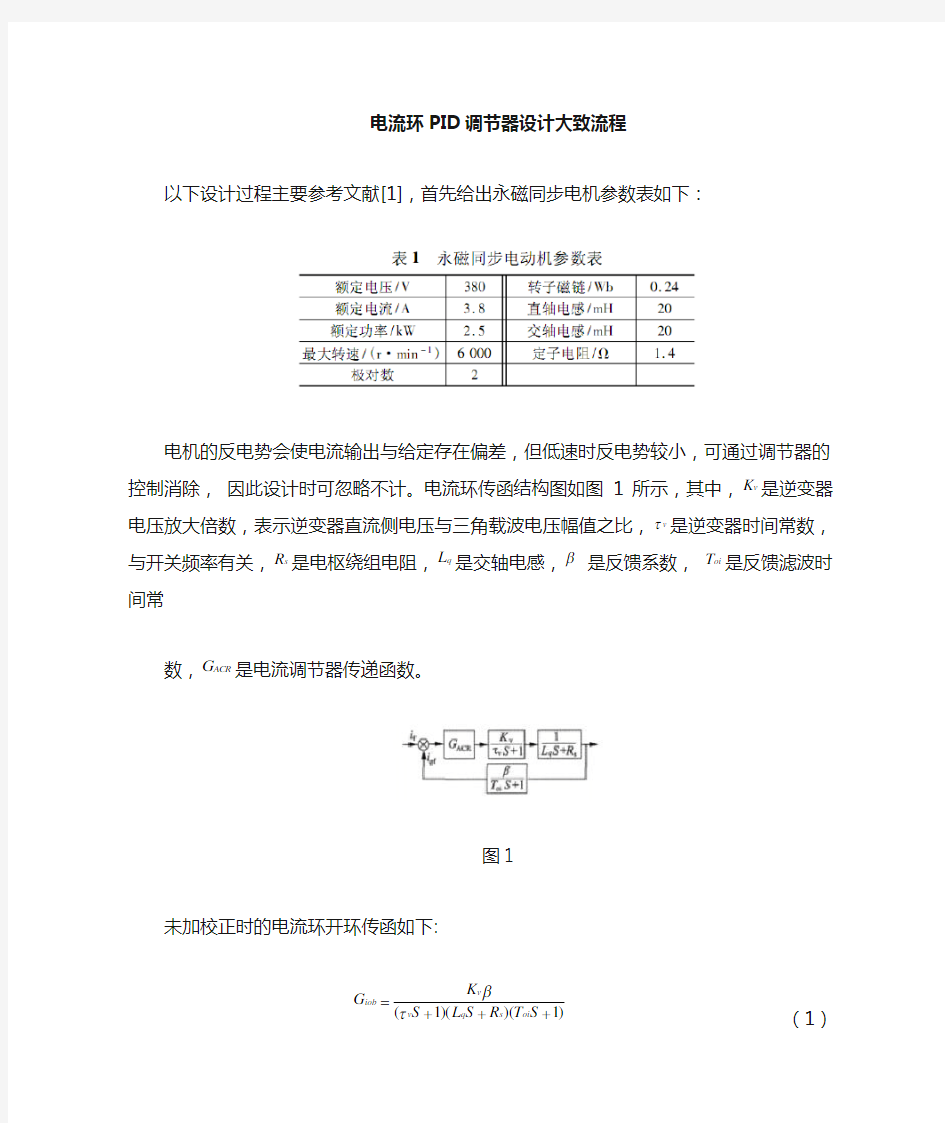
电机的反电势会使电流输出与给定存在偏差,但低速时反电势较小,可通过调节器的控制消除, 因此设计时可忽略不计。电流环传函结构图如图1所示,其中,v K 是逆变器电压放大倍数,表示逆变器直流侧电压与三角载波电压幅值之比,v τ是逆变器时间常数,与开关频率有关,s R 是电枢绕组电阻,q L 是交轴电感,β 是反馈系数, oi T 是反馈滤波时间常 数,ACR G 是电流调节器传递函数。
图1
未加校正时的电流环开环传函如下:
(1)()(1)v iob v q s oi K G S L S R T S βτ=
+++ (1) 式中: v τ、oi T 是小时间常数, 因此可将控制对象等效:
()[()1]
v iob q s v oi K G L S R T S βτ=+++ (2) 电流调节器可选用 PI 调节器进行设计: 1p i ACR i K K S G K S
+= (3) 用 PI 调节器的零点来抵消控制对象的大时间常数极点, 如下: 11q p i s L K K S S R +=
+ (4) 得到电流环的开环传递函数:
[()1]*v ik i oi v s
K G K S T S R βτ=++ (5) 系统要求电流环具有较快的响应速度, 同时超调又不可过大, 因此令:
()0.5v oi v i s
K T K R βτ+= (6)
设定逆变器开关频率为f=18kHz ,于是逆变器时间常数155.6v us f
τ==,将15.5dc v s U K U ==、0.6β=、
0.11ms oi T =和表1的电机参数代入到式(4)、式(6)中,得 6.5p K =,0.0022i K =。 加入 PI 调节器之前的系统开环幅相频率特性曲线如图2 所示, 系统明显不稳定; 加入 PI 调节器后得到的系统开环的幅相频率特性曲线如图 3 所示, 可见所设计的电流环是稳定的, 且有 45°左右的相角裕度。
图2 原系统幅相频率特性曲线 图3 补偿后电流环幅相频率特性曲线
参考文献:
[1]刘军,敖然,韩海云,秦海鹏,朱德明.永磁同步电动机伺服系统电流环优化设计[J ]. 微特电机,2012,40(6):17-20.
[2]熊小娟,韩亚荣,邱鑫.永磁同步电机伺服系统电流环设计及性能分析[J ]. 科技传播,2010,5(上):62-63.
[3]陈荣,邓智泉,严仰光.永磁同步服系统电流环的设计[J ]. 南京航空航天大学学报,2004,36(2):220-225.
锁相环电路设计
锁相环的原理 2007-01-23 00:24 1.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的 输入信号与部的振荡信号同步,利用锁相环 路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成u D(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压u C(t),对振荡器输出信号的频率实施控制。 2.锁相环的工作原理 锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为: (8-4-1) (8-4-2) 式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。则模拟乘法器的输出电压u D为: 用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压u C (t)。即u C(t)为: (8-4-3) 式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为:
电流调节器设计举例
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电得双闭环直流调速系统,整流装置采用三相桥式电路,基本 数据如下: 直流电动机: 220V、136A、 1460r /min, Ce=0、132V﹒min/r,允许过载倍数λ=1、5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0、5 时间常数 电流反馈系数β=0、062V/A(β≈10V/1.5I N) 试按工程方法设计电流调节器,设计要求如下 要求稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统结构图如下
双闭环直流调速系统电流环得设计 1.确定时间常数 (1)整流装置滞后时间常数Ts 。 -I dL U d0 U n + - - + - U i ACR 1/R T l s+1 R T m s U *i U c K s T s s+1 I d 1 C e + E β T 0i s+1 1 T 0i s+1 ASR 1 T 0n s+1 α T 0n s+1 U *n n
三相桥式电路得平均失控时间Ts=0、0017s。 (2)电流滤波时间常数 三相桥式电路每个波头得时间就是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因此取=2ms=0、002s。 (3)电流环小时间常数;按小时间常数近似处理,取=0、0037s。 2.选择电流调节器结构 根据设计要求:5%,而且 因此可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选择电流调节器参数 ACR超前时间常数:== 0、03s。 电流环开环增益:要求5%时,应取
=0、5因此 于就是,ACR得比例系数为 4.校验近似条件 电流环截止频率s-1 (1)晶闸管装置传递函数近似条件 ﹤ 现在 = s-1> 满足近似条件 (2)忽略反电动势对电流环影响得条件:; 现在, = 满足近似条件。 (3)小时间常数近似处理条件: =
锁相环应用电路仿真
高频电子线路实训报告锁相环路仿真设计 专业 学生姓名 学号 2015 年 6 月24日
锁相环应用电路仿真 锁相环是一种自动相位控制系统,广泛应用于通信、雷达、导航以及各种测量仪器中。锁相环及其应用电路是“通信电子电路”课程教学中的重点容,但比较抽象,还涉及到新的概念和复杂的数学分析。因此无论是教师授课还是学生理解都比较困难。为此,我们将基于Multisim的锁相环应用仿真电路引入课堂教学和课后实验。实践证明,这些仿真电路可以帮助学生对相关容的理解,并为进行系统设计工作打下良好的基础。锁相环的应用电路很多,这里介绍锁相环调频、鉴频及锁相接收机的Multisim仿真电路。 1.锁相环的仿真模型 首先在Multisim软件中构造锁相环的仿真模型(图1)。基本的锁相环由鉴相器(PD)、环路滤波器(I P)和压控振荡器(VCO)三个部分组成。图中,鉴相器由模拟乘法器A 实现,压控振荡器为V3,环路滤波器由R1、C1构成。环路滤波器的输出通过R2、R3串联分压后加到 压控振荡器的输入端,直流电源V2用来调整压控振荡器的中心频率。仿真模型中,增加R2、R3及的目的就是为了便于调整压控振荡器的中心频率。 图1 锁相环的仿真模型 2.锁相接收机的仿真电路 直接调频电路的振荡器中心频率稳定度较低,而采用晶体振荡器的调频电路,其调频围又太窄。采用锁相环的调频器可以解决这个矛盾。其结构原理如图2所示。
图2 锁相环调频电路的原理框图 实现锁相调频的条件是调制信号的频谱要处于低通滤波器通带之外,也就是说,锁相环路只对慢变化的频率偏移有响应,使压控振荡器的中心频率锁定在稳定度很高的晶振频率上。而随着输人调制信号的变化,振荡频率可以发生很大偏移。 图3 锁相环调频的仿真电路 根据图2建立的仿真电路如图3所示。图中,设置压控振荡器V1在控制电压为0时,输出频率为0;控制电压为5V时,输出频率为50kHz。这样,实际上就选定了压控振荡器的中心频率为25kHz,为此设定直流电压V3为2.5V。调制电压V4通过电阻Rs接到VCO的输人端,R实际上是作为调制信号源V4的阻,这样可以保证加到VCO输人端的电压是低通滤波器的输出电压和调制电压之和,从而满足了原理图的要求。本电路中,相加功能也可以通过一个加法器来完成,但电路要变得相对复杂一些。 VCO输出波形和输人调制电压的关系如图4所示。由图可见,输出信号频率随着输人信号的变化而变化,从而实现了调频功能。
4-20mA电流环、电压电流转换芯片方案比较
4-20mA电流输出芯片比较 Precision Voltage-to-Current Converter/Transmitter NAME XTR110 XTR111 SUPPLY RANGE to 40V7V to 44V NONLINEARITY%% INPUT0V to +5V, 0V to +10V0 to 12V OUTPUT 0mA to 20mA, 5mA to 25mA Outputs Other Ranges 0mA–20mA, 4mA–20mA, 5mA–25mA AND VOLTAGE OUTPUTS Output Current Equation I O = 10 [(Vref In/16) + (VIN1/4) + (VIN2/2)] /RSPAN I O = 10 × Vvin/Rset PROBABLE PRICE 90元10元
XTR110应用电路 XTR111内部没有提供将0V输入转换成4mA输出的电路,最常用的方法是采用两个电阻网 络连接参考电压和输入信号进行分压输入 XTR111 应用电路
4-20mA CURRENT TRANSMITTER with Sensor Excitation and Linearization NAME XTR105XTR112XTR114 SUPPLY RANGE to 36V PRECISION CURRENT SOURCES INPUT EXCITATION2- OR 3-WIRE RTD OPERATION Output Current Equation IO = VIN (40/RG) + 4mA, VIN in Volts, RG in Input Offset V oltage VCM = 2V PROBABLE PRICE25元50元60元 XTR105/XTR112/XTR114原理图
锁相环电路
手机射频部分的关键电路----锁相环电路 锁相坏电路是一种用来消除频率误差为目的反馈控制电路,目前市场销售的手机基本上都是采用这种电路来控制射频电路中的压控振荡器。使其输出准确稳定的振荡频率。如锁相坏(PLL)电路出现故障将导致本振的频率输出不准确,则导致手机无信号。 目前通信终端设备中对频率的稳定采用的是频率合成CSYN技术。频率合成的基本方法有三种:第一种直接频率合成;第二种锁相频率合成(PLL);第三种直接数字频率合成(DDS)。由于锁相频率合成技术在电路设计方面(简单),成本方面控制灵敏度方面,频谱纯净度方面等。都要胜于直接频率合成,与直接数字频率合成。所以被移动通信终端设备广范采用。它在手机电路中的作用是控制压控振荡器输出的频率,相位与基准信号的频率,相位保持同步。 锁相坏电路的构成与工作原理: 1、构成:它是由鉴相器(PD)低通滤波器(LPF) 压控振荡器(VCO)三部分组成。 鉴相器:它是一个相位比较器。基准频率信号和压控振荡器输出的取样频率在其内部 进行相位比较,输出误差电压。 低通滤波器:是将鉴相器输出的锁相电压进行滤波,滤除电流中的干扰和高频成分。得到一个纯净的直流控制电压。 压控振荡器:产生手机所要的某一高频频率。 (注:SYNEN、SYNCLK、SYNDATA来自CPU控制分频器,对本振信号进行N次分频)。 当VCO产生手机所须的某一高频频率。一路去混频管,另一路反馈给锁相环,中的分频器进行N次分频。在这里为什么要进行N次分频呢?首先要说明一下基准频率与VCO振荡取样频率在鉴相要满足3个条件。 ①频率相同。②幅度相同。③相位不同。为了满足鉴相条件,所以在电路中设置了分 频器。VCO振荡频率取样信号送入分频器完成N次分频后,得到一个与基准频率相位不同,但频率
电流调节器设计举例样本
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 直流电动机: 220V、136A、1460r/min,Ce=0.132V﹒min/r,容许过载倍数λ=1.5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0.5 时间常数 电流反馈系数β=0.062V/A(β≈10V/1.5I N) 试按工程办法设计电流调节器,设计规定如下 规定稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统构造图如下
双闭环直流调速系统电流环设计 1.拟定期间常数 (1)整流装置滞后时间常数Ts 。 三相桥式电路平均失控时间 T s =0.0017s 。 -I dL U U + - - + - U ACR 1/R T s+1 R T s U * U K T s+1 I 1 + E β T s+1 1 T s+1 ASR 1 T s+1 α T s+1 U * n
(2)电流滤波时间常数 三相桥式电路每个波头时间是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因而取=2ms=0.002s。 (3)电流环小时间常数;按小时间常数近似解决,取=0.0037s。2.选取电流调节器构造 依照设计规定:5%,并且 因而可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选取电流调节器参数
ACR超前时间常数:== 0.03s。电流环开环增益:规定5%时,应取=0.5因而 于是,ACR比例系数为 4.校验近似条件 电流环截止频率s-1(1)晶闸管装置传递函数近似条件﹤ 当前= s-1> 满足近似条件
【原创】锁相环PLL制作与调试要点.
基于MC145152+MC12022+MC1648L+LM358 的锁相环电路 一、MC145152(鉴相器) MC145152-2 芯片是摩托罗拉公司生产的锁相环频率合成器专用芯片。它是MC145152-1 芯片的改进型。主要具有下列主要特征: (1)它与双模(P/(P+1))分频器同时使用,有一路双模分频控制输出MC。当MC 为低电平时,双模分频器用(P+1)去除;当MC 为高电平时,双模分频器用模数P 去除。 (2)它有 A 计数器和N 计数器两个计数器。它们与双模(P/(P+1))分频器提供了总分频值(NP+A)。其中,A、N 计数器可预置。N 的取值范围为3~1023,A 的取值范围为0~63。A 计数器计数期间,MC 为低电平;N 计数器计数(N-A)期间,MC 为高电平。 (3)它有一个参考振荡器,可外接晶体振荡器。 (4)它有一个R计数器,用来给参考振荡器分频,R计数器可预置,R的取值范围:8,64,128,256,512,1024,1160,2048。设置方法通过改变RA0、RA1、RA2的不同电平,接下来会讲到。 (5)它有两路鉴相信号输出,其中,ФR、ФV 用来输出鉴相误差信号,LD 用来输出相位锁定信号。 MC145152-2 的供电电压为3.0 V~9.0 V,采用28 脚双列封装形式。MC145152-2的原理框图如图1 所示 MC145152-2 的工作原理:参考振荡器信号经R 分频 器分频后形成fR 信号。压控振荡器信号经双模P/(P+ 1)分频器分频,再经A、N 计数器分频器后形成fV 信 号,fV=fVCO/(NP+A)。fR 信号和fV 信号在鉴相器中 鉴相,输出的误差信号(φR、φV)经低通滤波器形成 直流信号,直流信号再去控制压控振荡器的频率。 当整个环路锁定后,fV=fR 且同相,fVCO=(NP+A) fV=(NP+A)fR,便可产生和基准频率同样稳定度和 准确度的任意频率。原理框图如右图:
电流环接口介绍
电流环接口介绍 电流环通信接口也称为电流回路通信接口,是用回路中的有无电流来表示二进制代码“1”和“0”,常见于兰吉尔B型表、部分兰吉尔D表和部分ABB表,在国产电表中很少使用。具体电气参数见下表:电流发送(TX)接收 (RX)“0”,无回路电流≤2.5mA≤3mA “1”, 20mA回路电流≥11mA≥9mA 压降发送(TX)接收 (RX)1,20mA回路电流, ≤2V≤3V MARK 工作状态下最大开路电压30V直流 电流环接口分为半双工(两线)和全双工(四线)两种,通信电流由抄表设备提供,电表侧无源。现场使用四线电流环的电表比较少,下面介绍两线电流环的接线和检修。 电表和终端的接线: 回路中电流为直流电流,因此要按照标注的极性接线。费率装置表示电表,HHU表示抄表设备。 在现场如果遇到两块以上这样的电表,可以采用将电表串联的方式接线: 电流环接口出现硬件故障比较容易判断,只需要仔细观察并借助于万用表进行简单测量就能够找到故障位置。下面以我们新联公司的 XL01终端中的两线电流环为例,说说不能抄表时的检测步骤: 1、确保主站下发的抄表参数正确,如果抄表接口板上有跳线设置,
要保证设置正确。 2、观察抄表发射指示灯,看终端能否正常启动抄表。不能启动则为 终端故障。 3、如果抄表接收指示灯常常,则说明电流回路没有构成。将终端上 的电流环输出端子短路,启动抄表,这时候抄表发射、接收指示灯应该同时闪烁,否则是终端故障。 4、在电表侧短路接线,启动抄表,接收/发射指示灯同时亮,否则 是接线有问题。 5、接好线后测量电表通信借口上的电压,对应电表上的极性,应该 有小于3V的电压(见前面表格中的接收压降)。如果电压高,则是电表坏,电压极性不正确则是接线反。
传动教材第2章转速电流双闭环直流调速系统和调节器的工程设计方法
第2章 转速、电流双闭环直流调速系统 和调节器的工程设计方法 2.1 转速、电流双闭环直流调速系统及其静特性 采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。 在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。这样的理想起动过程波形示于图2-1b 。 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。 2.1.1 转速、电流双闭环直流调速系统的组成 系统中设置两个调节器,分别调节转速和电流,如图2-2所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。这就形成了转速、电流双闭环调速系统。 转速和电流两个调节器一般都采用PI 调节器,图2-3。两个调节器的输出都是带限幅 + TG n ASR ACR U *n + - U n U i U * i + - U c TA M + - U d I d UPE - M T 图2-2 转速、电流双闭环直流调速系统结构 ASR —转速调节器 ACR —电流调节器 TG —测速发电机 TA —电流互感器 UPE —电力电子变换器 内外 n i
集成电路锁相环设计报告
锁相环CD4046设计频率合成器 ------集成电路考试实验设计报告 学校:福州大学 学院:物理与信息工程学院 班级:09级信息工程类2班 姓名:吴志强学号:110900636 姓名:吴鑫学号:110900635
目录 一、设计和制作任务 (3) 二、主要技术指标 (3) 三、确定电路组成方案 (3) 四、设计方法 (3) (一)、振荡源的设计 (3) (二)、N分频的设计 (3) (三)、10HZ标准信号源设计(即M分频的设计) (5) 五、锁相环参数设计 (6) 六、调试步骤 (6) 七、参考文献 (7) 附录:各芯片的管脚图 (7)
锁相环CD4046设计频率合成器 一、设计和制作任务 1.确定电路形式,画出电路图。 2.计算电路元件参数并选取元件。 3.组装焊接电路。 4.调试并测量电路性能。 5.写出课程设计报告书 二、主要技术指标 1.频率步进 10Hz 2.频率范围:1kHz—10kHz 3.电源电压 Vcc=5V 三、确定电路组成方案 原理框图如下,锁相环路对稳定度的参考振动器锁定,环内串接可编程的分频器,通过改变分频器的分配比N,从而就得到N倍参考频率的稳定输出。 晶体振荡器输出的信号频率f1, 经固定分频后(M分频)得到 基准频率f1’,输入锁相环的相 位比较器(PC)。锁相环的VCO 输出信号经可编程分频器(N分频) 后输入到PC的另一端,这两个信号进行相位比较,当锁相环路锁定后得到:f1/M=f1’=f2/N 故f2=Nf’1 (f’1为基准频率) 当N变化时,或者N/M变化时,就可以得到一系列的输出频率f2。 四、设计方法 (一)、振荡源的设计 用CMOS与非门和1M晶体组成 1MHz振荡器,如图14。图中Rf 使 F1工作于线性放大区。晶体的等效 电感,C1、C2构成谐振回路。C1、 C2可利用器件的分布电容不另接。 F1、F2、F3使用CD4049。 (二)、N分频的设计 用三片4522组成1——10kHZ频率合成器 CD1522的二一十进制1/N减计数器。其引脚见附录。其中D1-D4是预置端,Q1
电压环与电流环设计
控制电路设计 一、电流环的设计 电流环的设计核心是控制主电路上电感电流的平均值,使它处于稳定状态,根据主电路与设计思路得电流控制环的系统框图如下: 其中Vcv 为电压环的输出电压(即系统的参考电压),Vs 为锯齿波的幅值,IL 为电感上的电流,K1为采样的放大倍数。设置PI 为单零点—单极点补偿网络。如下图所示: 因为系统的开关频率为100KHZ ,为了避免开关频率对控制环路的影响,穿越频率fci 必须远远小于开关频率,当然为了对系统动态响应的速度,我们希望fci 越大越好,在一般的开关电源中,fci 都小于开关频率的1/10,此处我们设置为开关频率的1/10,即10KHZ 。补偿网络的传递函数为:211111()R C S G s R C S += , 由系统框图可以得系统的开环传递函数为:21211(1)11()1S R C S G S K R C S V SL +=, 式中:Vs=5V ;L=15uH; K1=1/100; S=jw;代入上式,当fci=10KHz 时,2()G S =1,令补偿零点角频率1211w R C = 在fci/2处,即1211w R C ==5KHz ,经计算得11R C =62.710-?,21R C =4210-?,所以21 R R =74,令1R =1K ,得2R =74K ,1C = nf, 代入得开环传递函数为:2245000()/10 S G S S -+= ,经MATLAB 画出BODE 图如下: 从上图可以看出,在(1/2)fci 频率处,开环传递函数的斜率由-40dB 变成-20dB ,可以达到较快的动态响应,由于传递函数以-20dB 的斜率穿越0dB
电流环设计
(1)确定时间常数 1)整流装置滞后时间常数s T 。按表2-2,三相桥式电路的平均失控时间s T =0.0017s 。 2)电流滤波时间常数oi T 。三相桥式电路每个波头的时间是3.3ms ,为了基本滤平波头,应有(1~2)oi T =3.33ms ,因此取oi T =2ms=0.002s 。 3)电流环小时间常数之和i T ∑。按小时间常数近似出黎,取∑i T =s T +oi T =0.0037s 。 (2)选择电流调节器结构 根据设计要求i σ≤5%,并保证稳态电流误差,可按典型Ⅰ型系统设计电流调节器。电流环控制对象是双惯性型的,因此可用PI 型电流调节器,其传递函数见式(3-48)。 检查对电源电压的抗扰性能:i l T T ∑≈0.0037 0.03≈8.11,参看表3-2的典型Ⅰ型系统动态抗扰性能,各项指标都是可以接受的。 (3)计算电流调节器参数 电流调节器超前时间常数:s T l 03.0i ==τ。 电流环开环增益:要求i σ≤5%是,按表3-1,应取i I T K ∑=0.5,因此 1-i I 135.10.0037 0.5T 0.5K s ≈== ∑ 于是,ACR 的比例系数为 1.5350.044 360.60.03135.1K R K K s i I i ≈???== βτ (4)校验近似条件 电流环截止频率:-1I ci 135.1s K ==ω 1)校验晶闸管整流装置传递函数的近似条件 ci ω>≈?=1-1-s 196.1s s 0.0017313T 1 满足近似条件 2)校验忽略反电动势变化对电流环动态影像的条件 ci l m s s T ω<≈??=--1136.9203 .022.013T 13 满足近似条件
PLL(锁相环)电路原理及设计 [收藏]
PLL(锁相环)电路原理及设计[收藏] PLL(锁相环)电路原理及设计 在通信机等所使用的振荡电路,其所要求的频率范围要广,且频率的稳定度要高。无论多好的LC振荡电路,其频率的稳定度,都无法与晶体振荡电路比较。但是,晶体振荡器除了可以使用数字电路分频以外,其频率几乎无法改变。如果采用PLL(锁相环)(相位锁栓回路,PhaseLockedLoop)技术,除了可以得到较广的振荡频率范围以外,其频率的稳定度也很高。此一技术常使用于收音机,电视机的调谐电路上,以及CD唱盘上的电路。 一PLL(锁相环)电路的基本构成 PLL(锁相环)电路的概要 图1所示的为PLL(锁相环)电路的基本方块图。此所使用的基准信号为稳定度很高的晶体振荡电路信号。 此一电路的中心为相位此较器。相位比较器可以将基准信号与VCO (Voltage Controlled Oscillator……电压控制振荡器)的相位比较。如果此两个信号之间有相位差存在时,便会产生相位误差信号输出。 (将VCO的振荡频率与基准频率比较,利用反馈电路的控制,使两者的频率为一致。) 利用此一误差信号,可以控制VCO的振荡频率,使VCO的相位与基准信号的相位(也即是频率)成为一致。 PLL(锁相环)可以使高频率振荡器的频率与基准频率的整数倍的频率相一致。由于,基准振荡器大多为使用晶体振荡器,因此,高频率振荡器的频率稳定度可以与晶体振荡器相比美。 只要是基准频率的整数倍,便可以得到各种频率的输出。 从图1的PLL(锁相环)基本构成中,可以知道其是由VCO,相位比较器,基准频率振荡器,回路滤波器所构成。在此,假设基准振荡器的频率为fr,VCO的频率为fo。 在此一电路中,假设frgt;fo时,也即是VC0的振荡频率fo比fr低时。此时的相位比较器的输出PD 会如图2所示,产生正脉波信号,使VCO的振荡器频率提高。相反地,如果frlt;fo时,会产生负脉波信号。
电压调节器设计
基于PWM控制的交流发电机电压调节器 摘要:本文介绍了基于SG3525 PWM控制器的交流发电机电压调节器的硬件电 路。较为详细地分析了通过检测交流发电机的输出平均电压来改变输出PWM波 的占空比,进而控制电机励磁绕组产生合适的励磁电流来使输出电压稳定于规定 的水平。 关键词:电压调节器;PWM Alternator voltage regulator based on the PWM Controller Abstracts:This article introduces the design of hardware of the alternator voltage regulator system based on the SG3525 PWM controller for synchronous machines. Detailed analysis of how to change the average duty cycle of the PWM wave by detecting the average output voltage of the alternator, and thus control the motor field winding to generating the appropriate excitation current,so that the output voltage is stabilized at the required level. Key words: Voltage regulator; PWM 前言: 电压调节电路是航空发电机Array的重要组成部分。其基本组成有 电压检测、比较、放大与执行和 控制几个环节,如图1所示。本 文的交流发电机调压系统是以 SG3525芯片为核心的。交流发电 机的输出平均电压经电压采样电 路反馈到SG3525的1脚,即误差 放大器的反相端。当输出电压有 波动时,误差放大器会放大误差, 后续电路将会自动调节其输出 图1 电压调节器方块图 PWM波的占空比,进而使功率驱 动电路的输出波形的导通时间改变,从而调节了发电机的励磁电流,使其输出电压回复为正常值。 1 输出电压检测电路 本调节器输出电压的检测采用 平均电压检测,如图2所示。电压 Ud由三相电压经变压整流后取得, 其平均值取决于三个线电压的大 小。 图2 平均电压检测电路
集成电路课程设计——锁相环
集 成 电 路 实 验 报 告 学号:110800316 姓名:苏毅坚指导老师:罗国新 2011年1月
锁相环CD4046设计频率合成器 实验目的:设计一个基于锁相环CD4046设计频率合成器 范围是10k~100K,步进为1K 设计和制作步骤: 确定电路形式,画出电路图。 计算电路元件参数并选取元件。 组装焊接电路。 调试并测量电路性能。 确定电路组成方案 原理框图如下,锁相环路对稳定度的参考振动器锁定,环内串接可编程的分频器,通过改变分频器的分配比N,从而就得到N倍参考频率的稳定输出。 晶体振荡器输出的信号频率f1, 经固定分频后(M分频)得到 基准频率f1’,输入锁相环的相 位比较器(PC)。锁相环的VCO 输出信号经可编程分频器(N分频) 后输入到PC的另一端,这两个信号进行相位比较,当锁相环路锁定后得到:f1/M=f1’=f2/N 故f2=Nf’1 (f’1为基准频率) 当N变化时,就可以得到一系列的输出频率f2。 设计方法 (一)、振荡源的设计 用CMOS与非门和1M晶体组成 1MHz振荡器,如图14。图中Rf 使 F1工作于线性放大区。晶体的等效 电感,C1、C2构成谐振回路。C1、 C2可利用器件的分布电容不另接。 F1、F2、F3使用CD4049。 (二)、N分频的设计 N分频采用CD40103进行分频。CD40103是BCD码8位分频器。采用8位拨码开关控制分频大小。输入的二进制大小即为分频器N分频。图中RP1为1K排阻
(三)、1KHZ标准信号源设计(即M分频的设计) 根据4518的输出波形图,可以看出4518包含二分频、四分频、十分频,用二片CD4518(共4个计数器)组成一个1000分频器,也就是三个十分频器,这样信号变为2Khz.再经过双D触发器,这样就可把2MHz的晶振信号变成500hz 的标准信号。如下图所示: (四) 4046锁相环的设计锁相环4046为主芯片。电路图如下:500Hz 信号从14脚输入。3 脚4脚接N分频电路,即40103分频电路。13脚接低通滤波器。 本设计中,M固定,N可变。基准频率f’1 定为1KHz,改变N值,使N=1~999,则可产生 f2=1KHz—999KHz的频率范围。 锁相环锁存范围: fmax=100KHz fmin=1KHz
《电力拖动自动控制系统》-第二章转速、电流双闭环直流调速系统和调节器的工程设计方法
第二章转速、电流双闭环直流调速系统和调节器 的工程设计方法 内容提要: 转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。本章着重阐明其控制规律、性能特点和设计方法,是各种交、直流电力拖动自动控制系统的重要基础。我们将重点学习: ●转速、电流双闭环直流调速系统及其静特性 ●双闭环直流调速系统的数学模型和动态性能分析 ●调节器的工程设计方法 ●按工程设计方法设计双闭环系统的调节器 ●弱磁控制的直流调速系统 2.1 转速、电流双闭环直流调速系统及其静特性 问题的提出: 第1章中表明,采用转速负反馈和PI调节器的单闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。 1. 主要原因 是因为在单闭环系统中不能随心所欲地控制电流和转矩的动态过程。在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制电流的,但它只能在超过临界电流值 Idcr 以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想地控制电流的动态波形。 2.理想的启动过程 a) 带电流截止负反馈的单闭环调速系统 b) 理想的快速起动过程 2-1 直 流调速系统起动过程的电流和转速波形 性能比较: 带电流截止负反馈的单闭环直流调速系统起动过程如图所示,起动电流达到最大值Idm 后,受电流负反馈的作用降低下来,电机的电磁转矩也随之减小,加速过程延长。理想起动过程波形如图所示,这时,起动电流呈方形波,转速按线性增长。这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动过程。 3. 解决思路 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值Idm的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用
XTR115电流环电路原理及应用
XTR115电流环电路原理及应用 在各种数据采集与监控中通常用一个仪表放大器来完成信号的调理,但是工业现场进行长线传输时,往往会产生以下问题:1)由于传输的信号是电压信号,传输线会受到噪声的干扰;2)传输线的分布电阻会产生电压降;3)现场无法提供仪表放大器的工作电压。为了解决上述问题并避开相关噪声的影响,通常用电流来传输信号,这是因为电流对噪声并不敏感。4~20 mA的电流环便是用4 mA表示零信号,用20 mA表示信号的满刻度,而将低于4 mA 和高于20 mA的信号用作各种故障的报警。电流环电路,根据转换原理的不同可划分成以下两种类型:一种是电压/电流转换器,亦称电流环发生器,它能将输入电压转换成4~20 mA的电流信号(典型产品有1B21,1B22,AD693,AD694,XTR115和XTR116);另一种属于电流/电压转换器,也叫电流环接收器(典型产品为RCV420),上述产品可满足不同用户的需要。电流环电路,根据器件位置的不同又可划分成以下两种类型:两线制和三线制。当监控系统需要通过长线驱动现场的驱动器件(如阀门等)时,一般采用三线制变送器,这里,电流环器件位于监控的系统端,由系统直接向电流环器件供电,供电电源是二根电流传输线以外的第三根线。两线系统是电流环器件和传感器位于现场端,由于现场供电问题的存在,一般是接收端利用4~20 mA的电流环向远端的电流环器件供电,通过4~20 mA来反映信号的大小。 XTR系列是美国BB(BURR-BROWN)公司生产的精密电流变送器,该公司现已并入美国Texas Instruments公司。该系列产品包括XTR101,XTR10 5,XTR106,XTR110,XTR115和XTR116共6种型号。其特点是能完成电压/电流(或电流/电流)转换,适配各种传感器构成测试系统、工业过程控制系统、电子秤重仪等。其中,XTR115和XTR116能够满足工业测量标准的两线4~20 mA电流环电路,该电路设计巧妙、使用方便、超低静态电流,非常适合于变送器等典型工业测量应用之中。本文针对两线的XTR115电流环电路的工作原理和典型应用展开详细讨论,可为4~20 mA电流环电路的使用提供有益参考。1 XTR115的性能特点 XTR115具有如下性能特点: 1)XTR115属于二线制电流变送器,内部的2.5 V基准电压可作为传感器的激励源。XTR115可将传感器产生的40~200μA弱电流信号放大100倍,获得4~20 mA的标准输出。当环路电流接近32 mA时能自动限流。如果在3脚与5脚之间并联一只电阻,就可以改变限流值。 2)芯片中增加了+5 V精密稳压器,其输出电压精度为±0.05%,电压温度系数仅为20x10-6/℃,可给外部电路(例如前置放大器)单独供电,从而简化了外部电源的设计。 3)精度高,非线性误差小。转换精度可达±0.05%,非线性误差仅为±0.003%。 4)环路电源电压的允许范围宽为7.5~36 V。XTR115由环路电源供电。工作温度范围是-40~+85℃。 5)专门设计了功率管接口,适配外部NPN型功率晶体管,它与内部输出晶体管并联后可降低芯片的功耗。2 XTR115的工作原理 XTR115和XTR116用SO-8小型化封装,其结构组成及原理图,XTR115和XTR116内部电路主要由3部分组成。 第一部分是电流环电路的核心部分,它是由内部的运算放器A1、电阻RIN、R1、R2、Rlim 和外接晶体三极管T1组成。第二部分是电源调整电路,它提供传感器部分的外围电路工作电源和参考电压。第三部分是由电阻Ra、Rb、Rlim和晶体三极管TO组成保护电路,以防止输出电流过大或上电过程中的过冲脉冲损坏芯片。为了叙述方便,摘出电流环电路部分。 图2电路中,信号电压施加在VIN和VG之间,VG相当于传感器部分的参考点。根据运算放大器的基本原理,运算放大器的两个输入端电压基本相等,流入运算放大器输入端的电流基本为零。可知:此时的I0只是信号变化部分的电流,它的变化范围是0~16 mA,对应到I3是0~160μA,可以根据这一电流和输入信号的电压幅度决定输入电阻RIN;要
电流环调节器设计过程
电流环PID 调节器设计大致流程 以下设计过程主要参考文献[1],首先给出永磁同步电机参数表如下: 电机的反电势会使电流输出与给定存在偏差,但低速时反电势较小,可通过调节器的控制消除, 因此设计时可忽略不计。电流环传函结构图如图1所示,其中,v K 是逆变器电压放大倍数,表示逆变器直流侧电压与三角载波电压幅值之比,v τ是逆变器时间常数,与开关频率有关,s R 是电枢绕组电阻,q L 是交轴电感,β 是反馈系数, oi T 是反馈滤波时间常 数,ACR G 是电流调节器传递函数。 图1 未加校正时的电流环开环传函如下: (1)()(1)v iob v q s oi K G S L S R T S βτ= +++ (1) 式中: v τ、oi T 是小时间常数, 因此可将控制对象等效: ()[()1] v iob q s v oi K G L S R T S βτ=+++ (2) 电流调节器可选用 PI 调节器进行设计: 1p i ACR i K K S G K S += (3) 用 PI 调节器的零点来抵消控制对象的大时间常数极点, 如下: 11q p i s L K K S S R += + (4) 得到电流环的开环传递函数: [()1]*v ik i oi v s K G K S T S R βτ=++ (5) 系统要求电流环具有较快的响应速度, 同时超调又不可过大, 因此令: ()0.5v oi v i s K T K R βτ+= (6)
设定逆变器开关频率为f=18kHz ,于是逆变器时间常数155.6v us f τ==,将15.5dc v s U K U ==、0.6β=、 0.11ms oi T =和表1的电机参数代入到式(4)、式(6)中,得 6.5p K =,0.0022i K =。 加入 PI 调节器之前的系统开环幅相频率特性曲线如图2 所示, 系统明显不稳定; 加入 PI 调节器后得到的系统开环的幅相频率特性曲线如图 3 所示, 可见所设计的电流环是稳定的, 且有 45°左右的相角裕度。 图2 原系统幅相频率特性曲线 图3 补偿后电流环幅相频率特性曲线 参考文献: [1]刘军,敖然,韩海云,秦海鹏,朱德明.永磁同步电动机伺服系统电流环优化设计[J ]. 微特电机,2012,40(6):17-20. [2]熊小娟,韩亚荣,邱鑫.永磁同步电机伺服系统电流环设计及性能分析[J ]. 科技传播,2010,5(上):62-63. [3]陈荣,邓智泉,严仰光.永磁同步服系统电流环的设计[J ]. 南京航空航天大学学报,2004,36(2):220-225.
锁相环计算方法
2、理论分析计算与电路设计 2.1 锁相环 2.1.1 锁相环原理 为了使系统产生稳定的载波,本系统设计中采用锁相环路。锁相环路是一种反馈控制电路,将参考信号与输出信号之间的相位进行比较,产生相位误差电压来调整输出信号的相位以达到与参考信号同频的目的。由MC145152、MC12022及压控振荡器组成的锁相环路产生 的载波的稳定度达到4×10-5,准确度达到3×10-5 。 锁相环的总体框图如下: 2.1.2 锁相环分频 锁相环分频由参考分频和可编程分频组成,由MC145152及MC12022实现。 分频框图如下: 图中PD 为数字鉴相器,f o 为压控振荡的输出频率(即发射频率)。 由于压控振荡器输出信号的频率比较大,MC145152无法对它直接分频,必须用MC12022芯片先进行预分频获得频率较小的信号。MC12022内有64和63两种分频系数 本设计中采用64分频,即P=64。 MC12022输出的信号进入MC145152进行再次分频后与参考信号进行相位比较,使载波达到与参考信号相同的稳定度。本设计中参考信号通过晶振分频得到。参考晶振(10.24MHz 晶体振荡器,频率稳定度可达10-5~10-6 )从MC145152芯片的OSCIN 、OSCOUT 接入,MC145152中的÷R 计数器对参考信号进行参考分频。本设计中设置R =1024,即R A0R A1R A2=101,对晶振频率进行1024分频得到10KHz 的参考频率信号。用4位拨码开关设置R 的值,MC145152的参考分频系数如下: MC145152芯片集分频、鉴相于一体,内有÷A 减法计数器,÷N 减法计数器进行可编程分频。分频系数N 、A 由并行输入的数据控制,本设计中通过单片机来控制N 、A,改变N 、A 的值即可实现频道的选择。 可编程分频的原理及计算如下:
电流环控制原理分析
电流环控制原理分析 电流环是使电机以恒定的电流运转,以产生恒定的加速力矩。这对于转动惯量大的电机来说比较重要,它可以使电机一直以固定的电流驱动电机运转,驱动电流不会因为转速的升高下降。 ?要进行电流控制,首先必须时刻监控电机工作电流,因此电流传感器是伺服系统中的一个重要元件,它的精度和动态性能直接影响着系统的低速性能和快速性。电流检测的方法有电阻检测、光耦检测等各种不同的检测方法,本系统采用磁平衡原理实现的霍尔元件检测电流的方法,检测电源母线电路电流。采用的元器件为霍尔效应磁场补偿式电流传感器,此器件被国际上推荐为电力电子线路中的关键电流检测器件。它把磁放大器、互感器、霍尔元件和电子线路的思想集成一体,具有测量、反馈、保护的三重功能。实际是有源电流互感器,它最巧妙的构思是“磁场补偿”。被测量的原边磁场同测量绕组里的测量磁动势,时时补偿为零。即铁心里面实际没有磁通,因而其体积可以做得很小,而不用担心铁心饱和,也不用担心频率、谐波的影响。它的磁动势能补偿原理是利用霍尔效应的作用,当二者磁动势能不平衡时,霍尔元件上会产生磁动势,此磁动势作为以±15Y外加电源供电的差分放大器的输入信号,放大器的输出电流即为传感器的测量电流,自动迅速地恢复磁动势平衡,即霍尔输出总保持为零。这样,测量电流的波形忠实地反映了原边被测电流的波形,其大小只是一个匝比的关系。 ?具体说来,霍尔效应磁场补偿式电流传感器具有以下优点: ?它克服了传统的电流取样元件受规定频率、规定波形的限制及不适应功率变频发展,波形常不标准的缺点。它响应频率的带宽为0~100kHz,对任何波形,特别是含有直流分量的信号都可以迅速响应,符合电力电子技术,包
基于锁相环的FSK解调电路设计
基于锁相环的FSK 解调电路设计 摘要:介绍了一种FSK 信号调制解调电路的设计思想,发送端采用锁相环芯片CD4046实现了基带信号的FSK 调制,接收端采用普通鉴频法进行解调。将FSK 信号转换为ASK 信号,并采用检波和低通滤波电路恢复出其基带信号。该电路具有结构简单、成本低廉、工作可靠等优点,可适用于低速电力线载波通信中。 关键词:电力线载波通信;FSK ;锁相环芯片;调制;解调 A Method of Design for FSK Modem Abstract:This paper describes a method of design for FSK modem.Adopting the phase —locked loop chip CD4046 at the sending —end to rea “ze FSK nlodulation for baseband signal ,and the frequency discrimination method is adopted to transfonn FSK signaI into ASK signal at the receiving end.The detection circuit and low pass filtercircuit are used to recover their baseband signaI.This kirld of circuit has the advantage of simple structure ,cheap cost and being reliable work ,and applicable for the low —speed power line carrier communication. Keywords :power line carrier communication ;FSK ;phase lock loop ;modulation ;demodulation 电力线载波信道中,远动装置的基带数字信号频率一般在3.4kHz 以下,一般要经过调制器调制,将频率搬移至载波通信频段40~500kHz ,然后将信号送至功率放大器放大,并经高压结合设备隔离后,送到高压输电线进行传输。在接收端,经高压结合设备隔离后的高频信号经接收装置的解调器还原成基带信号[1]。针对这种情况,本文介绍一种简单的FSK 信号调制解调器的设计方法。 1 基本原理 在中、低速异步传输用调制解调器常采用FSK 信号调制方式[2],其原理如图1所示:FSK 信号调制又称数字调频,他是用两种不同的载频ω1、ω2来代表脉冲调制信号1和0,而载波的振幅和相位不变。如果载波信号采用正弦型波,则FSK 信号可表示为: 1m 2cos , 1()cos ,2m U t S t U t ωω?=??代表数字码元“”代表数字码元“” 1-1 图1中G(t)为1时FSK 信号S(t)的频率为?1;G(t) 为0时FSK 信号S(t)的频率为?2,将S(t)分解为信号S 1(t)与S 2(t)之和,则有: 12()()()S t S t S t =+ 1-2 根据相关的公式可求得FSK 信号的带宽为: 12||2FSK B f f B =-+ 1-3 式中:1f 为对应脉冲调制信号1的载波频率; 2f 为对应脉冲调制信号0的载波频率; B 为数字基带信号的带宽。