SG3525脉宽调制型控制器
SG3525脉宽调制型控制器是美国通用电气公司的产品,作为SG3524的改进型,更适合于运用MOS管作为开关器件的DC/DC变换器,它是采用双级型工艺制作的新型模拟数字混合集成电路,性能优异,所需外围器件较少。它的主要特点是:输出级采用推挽输出,双通道输出,占空比0-50%可调.每一通道的驱动电流最大值可达200mA,灌拉电流峰值可达500mA。可直接驱动功率MOS管,工作频率高达400KHz,具有欠压锁定、过压保护和软启动等功能。该电路由基准电压源、震荡器、误差放大器、PWM比较器与锁存器、分相器、欠压锁定输出驱动级,软启动及关断电路等组成,可正常工作的温度范围是0-700C。基准电压为5.1 V士1%,工作电压范围很宽,为8V到35V.
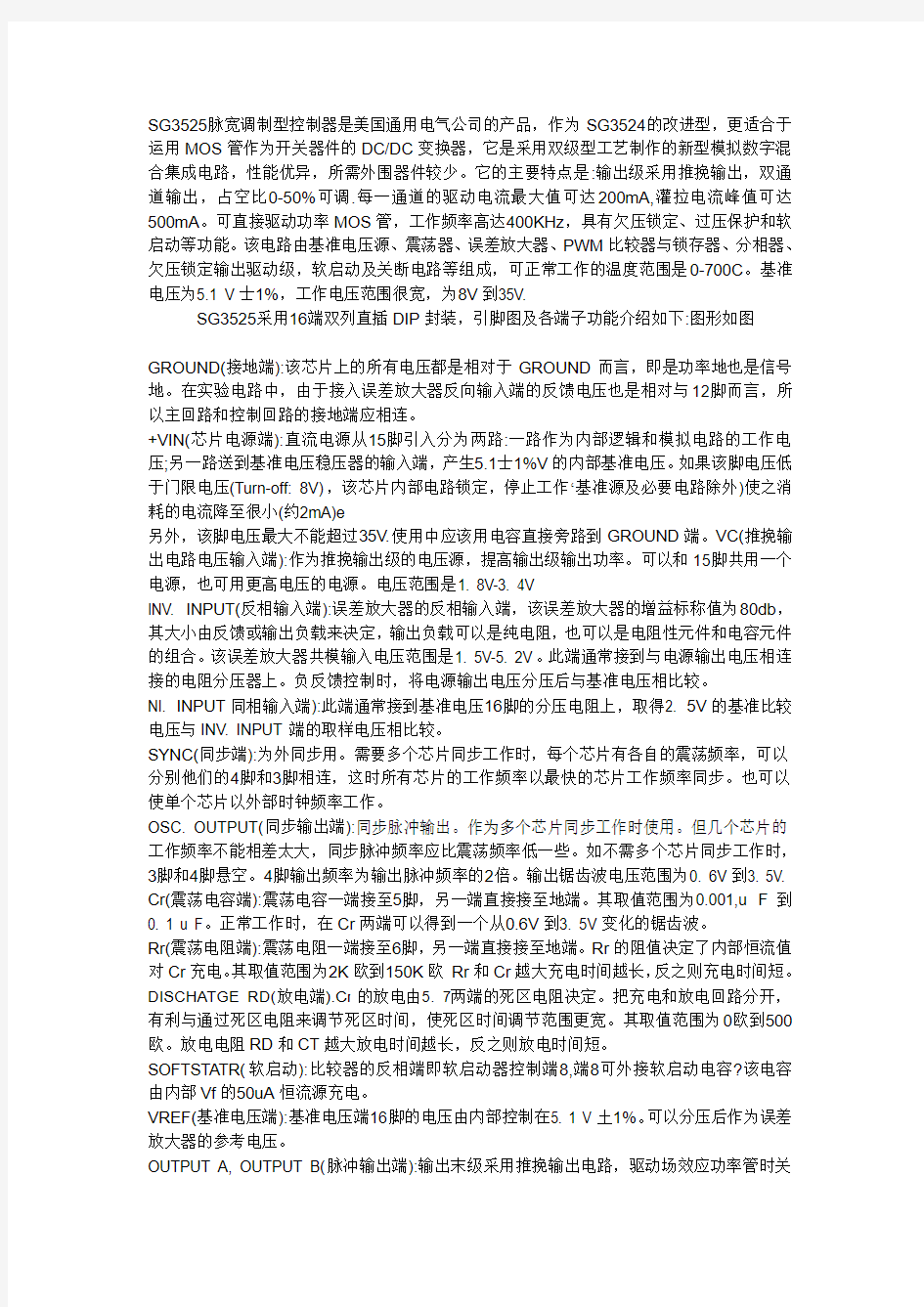
SG3525采用16端双列直插DIP封装,引脚图及各端子功能介绍如下:图形如图
GROUND(接地端):该芯片上的所有电压都是相对于GROUND而言,即是功率地也是信号地。在实验电路中,由于接入误差放大器反向输入端的反馈电压也是相对与12脚而言,所以主回路和控制回路的接地端应相连。
+VIN(芯片电源端):直流电源从15脚引入分为两路:一路作为内部逻辑和模拟电路的工作电压;另一路送到基准电压稳压器的输入端,产生5.1士1%V的内部基准电压。如果该脚电压低于门限电压(Turn-off: 8V),该芯片内部电路锁定,停止工作‘基准源及必要电路除外)使之消耗的电流降至很小(约2mA)e
另外,该脚电压最大不能超过35V.使用中应该用电容直接旁路到GROUND端。VC(推挽输出电路电压输入端):作为推挽输出级的电压源,提高输出级输出功率。可以和15脚共用一个电源,也可用更高电压的电源。电压范围是1. 8V-3. 4V
INV. INPUT(反相输入端):误差放大器的反相输入端,该误差放大器的增益标称值为80db,其大小由反馈或输出负载来决定,输出负载可以是纯电阻,也可以是电阻性元件和电容元件的组合。该误差放大器共模输入电压范围是1. 5V-5. 2V。此端通常接到与电源输出电压相连接的电阻分压器上。负反馈控制时,将电源输出电压分压后与基准电压相比较。
NI. INPUT同相输入端):此端通常接到基准电压16脚的分压电阻上,取得2. 5V的基准比较电压与INV. INPUT端的取样电压相比较。
SYNC(同步端):为外同步用。需要多个芯片同步工作时,每个芯片有各自的震荡频率,可以分别他们的4脚和3脚相连,这时所有芯片的工作频率以最快的芯片工作频率同步。也可以使单个芯片以外部时钟频率工作。
OSC. OUTPUT(同步输出端):同步脉冲输出。作为多个芯片同步工作时使用。但几个芯片的工作频率不能相差太大,同步脉冲频率应比震荡频率低一些。如不需多个芯片同步工作时,3脚和4脚悬空。4脚输出频率为输出脉冲频率的2倍。输出锯齿波电压范围为0. 6V到3. 5V. Cr(震荡电容端):震荡电容一端接至5脚,另一端直接接至地端。其取值范围为0.001,u F到0. 1 u F。正常工作时,在Cr两端可以得到一个从0.6V到3. 5V变化的锯齿波。
Rr(震荡电阻端):震荡电阻一端接至6脚,另一端直接接至地端。Rr的阻值决定了内部恒流值对Cr充电。其取值范围为2K欧到150K欧Rr和Cr越大充电时间越长,反之则充电时间短。DISCHATGE RD(放电端):Cr的放电由5. 7两端的死区电阻决定。把充电和放电回路分开,有利与通过死区电阻来调节死区时间,使死区时间调节范围更宽。其取值范围为0欧到500欧。放电电阻RD和CT越大放电时间越长,反之则放电时间短。
SOFTSTATR(软启动):比较器的反相端即软启动器控制端8,端8可外接软启动电容?该电容由内部Vf的50uA恒流源充电。
VREF(基准电压端):基准电压端16脚的电压由内部控制在5. 1 V土1%。可以分压后作为误差放大器的参考电压。
OUTPUT A, OUTPUT B(脉冲输出端):输出末级采用推挽输出电路,驱动场效应功率管时关
断速度更快.11脚和14脚相位相差1800,拉电流和灌电流峰值达200mA。由于存在开闭滞后,使输出和吸收间出现重迭导通。在重迭处有一个电流尖脉冲,起持续时间约为l00ns。可以在V<处接一个约0. luf的电容滤去电压尖峰。
COMPENSATION(补偿端):在误差放大器输出端9脚与误差放大器反相输入端1脚间接电阻与电容,构成PI调节器,补偿系统的幅频、相频响应特性。补偿端工作电压范围为1. 5V 到5. 2V.
SHUTDOWN(关断端):10端为PWM锁存器的一个输入端,一般在10端接入过流检测信号。过流检测信号维持时间长时,软起动端8接的电容C:将被放电。电路正常工作时,该端呈高电平,其电位高于锯齿波的峰值电位(3. 30。在电路异常时,只要脚10电压大于0. 7V,三极管导通,反相端的电压将低于锯齿波的谷底电压(0.9V),使得输出PWM信号关闭,起到保护作用。
正弦脉宽调制(SPWM)变频器
引言 随着电力电子技术的飞速发展,正弦脉宽调制(SPWM)变频器也得到了大力的发展,在各个领域内得到了广泛的应用。SPWM 变频器主要应用于中小容量,高性能的交流调速系统中,这种新型的变频器具有如下的优点: (1)输出电压的幅值和频率均在逆变器内控制和调节,可以方便的实现压频比恒定控制或低频时幅值电压的补偿等功能,系统的动态性能较好; (2)功率变化只在逆变器内完成,逆变器可由二极管整流供电,电网的功率因数较高; (3)由SPWM逆变器供电的异步电机的电流波形接近正弦波,谐波分量较少,矩阵脉动小,改善了电动机的运行性能。 鉴于正弦脉宽(SPWM)变频器的上述优点,以及在实际电气传动系统中,不同设备对电源的不同需求。本文采用了新型功率器件IGBT和8031AH单片机控制系统,设计了一种新型的单相桥式SPWM变频电源。该变频电源采用恒压频比控制,即U/F为常数,能使主频率在0 ~ 100Hz内可调,且将软件设计和硬件设计结合起来,减少了硬件电路的不必要的成本,又使软件编程不至于繁锁。 本设计由我和张建忠同学合作完成,我主要作硬件原理设计参数计算与软件编程、调试等工作,具体内容在本论文中有详述。而有关硬件绘图、电路仿真及电路介绍等内容可参阅张建忠同学的毕业论文。 由于设计者的能力有限,在设计过程中得到了常宝林老师的悉心教导和大力协助,才将本设计顺利的完成。在此,向指导老师并支持过我们的各位老师表示衷心的感谢。
目录 第一章脉宽调制(PWM)逆变器 一、脉宽调制技术(PWM)及其分类…………………….. 二、正弦脉宽调制技术……………………………………… 三、同步调制和异步调制…………………………………… 四、SPWM波形的软件生成……………………………… 第二章单相桥式正弦脉宽调制(SPWM)变频电源硬件设计…… 一、设计方案及总体框图………………………………….. 二、电路原理与参数计算………………………………….. §1.主电路…………………………………………………… §2.驱动电路…………………………………………………§3. 吸收电路………………………………………………….. §4.保护电路………………………………………………….§5. 控制及接口电路…………………………………………. 第三章软件设计……………………………………………….一.对称规则采样法………………………………………….二.地址分配………………………………………………….三.程序设计…………………………………………………..四.程序调试与仿真…………………………………………五.程序清单…………………………………………………… 结束语……………………………………………………………….
振幅调制器的设计MC
通信电子课程设计实验报告 课程名称振幅调制器的设计 专业通信工程 班级 学号 姓名 指导教师 2015年7月12日
目录 一、项目概述 1.1引言-------------------------------------------------------3 1.1 项目简介---------------------------------------------------3 1.2 任务及要求-------------------------------------------------4 二、项目实施过程 2.1 MC1496部结构及原理---------------------------------------4 2.2原理设计容------------------------------------------------6 2.2.1普通调幅电路设计---------------------------------------6 2.2.2抑制载波的双边带调幅 ----------------------------------7 2.2.3普通调幅与载波被抑制双边带调幅波的区别-----------------8 2.3元件参数设计-------------------------------------------------8 三、结果分析 3.1调幅电路工作过程--------------------------------------------10 3.2调幅电路实验结果--------------------------------------------12 3.2.1 AM普通调幅调制波形输出-------------------------------12 3.2.2 DSB载波被抑制双边带调幅波形输出----------------------13 3.2.3 信号源的输出------------------------------------------13 四、项目总结-------------------------------------------------------14 五、相关介绍-------------------------------------------------------15 六、参考文献-------------------------------------------------------16 七、附录-----------------------------------------------------------16
第6.1节 增强型脉宽调制器(ePWM)
第6章DSP片上控制与采样外设 6.1 增强型脉宽调制器(ePWM)
6.1.1 ePWM模块概述 ?增强型脉冲宽度调制器(ePWM) ?ePWM模块中每个完整的PWM通道都是由两个PWM输出组成,即ePWMxA和ePWMxB ?有时为了能够更精确控制PWM输出,加入了硬件扩展模块—高精度脉冲宽度调制器(HRPWM) ?当多个ePWM模块集成在一个器件内时,如图:
每个ePWM模块都具有以下特征: ●周期和频率可控的16位时间基准计数器。 ●两个PWM输出(EPWMxA,EPWMxB),可以配置成以下工作方式:两个 独立的带有单个边沿操作的PWM输出、两个独立的带有双边沿对称操作的PWM输出、一个独立的带有双边沿非对称操作的PWM输出。 ●通过软件可实现PWM信号的异步越权控制。 ●可编程的相位控制,以支持相对其它ePWM模块的相位滞后或超前操 作。 ●逐周期的硬件上相位同步。 ●独立的上升沿和下降沿死区延时控制。 ●可编程错误区域分配,用于故障时的逐周期控制和单次控制。 ●所有事件都可以触发CPU中断以及ADC启动转换(SOC)。 ●事件可预定标,减小CPU频繁响应中断的负担。 ●循环周期性的硬件锁定(同步)相位关系。 ●错误条件可强制PWM输出为高、低以及高阻状态。 ●高频载波信号实现PWM斩波,对于脉冲变压器门极驱动非常有用。
ePWM子模块概述 ?ePWM模块主要包含以下7部分:时间基准子模块;计数比较子模块;动作限定子模块;死区控制子模块;PWM斩波子模块;错误区域控制子模块和事件触发子模块。 ?每个ePWM模块都是由7个子模块组成,并且系统内通过信号进行连接,如图:
脉宽调制(PWM)技术在电力电子电路的应用
摘要 【摘要】脉冲调制(PWM)技术最早起源于通信技术的调制、解调的思想,并将这种思想推广到测量、电力电子领域。随着全控型器件的发展与微处理器的出现,PWM技术已经变成为了电力电子领域中的重要技术,特别是在斩波电路、逆变电路。本文主要研究了PWM技术的理论基础(面积等效原理)及其控制原理;分析了在PWM控制下降压斩波电路的工作情况,并用matlab建模;分析了在180°方波控制与SPWM控制两种方法下三相桥式逆变电路的工作状态,对比两种方法的优劣,并考虑了加入死区时间对SPWM的影响。结合异步电机变频调速的相关原理,对SPWM技术控制下的逆变电路进行变化,通过控制输出电压的变化来实现变频调速。选择具体的电路,根据理论分析计算相关的参数。使用Matlab软件进行搭建仿真电路,将仿真得到的数据、波形与理论分析相互分析对照,总结其特点。 【关键词】PWM;DC–DC;DC-AC;MATLAB仿真 I
Abstract 【ABSTRACT】Pulse modulation (PWM) technology originated in the communication technology modulation, demodulation of the idea, and this idea extended to the field of measurement, power electronics. With the development of full-controlled devices with the advent of microprocessors, PWM technology has become an important technology in the field of power electronics, especially in chopping circuits, inverting circuits. This paper mainly studies the theoretical basis of the PWM technology (area equivalent principle) and its control principle. The work of the step-down chopper circuit under PWM control is analyzed and modeled by matlab. The analysis of the 180 ° square wave control and SPWM Control the working state of the three-phase bridge inverter circuit under the two methods, compare the advantages and disadvantages of the two methods, and consider the influence of adding dead time to SPWM. Combined with the principle of asynchronous motor frequency control, SPWM technology under the control of the inverter circuit changes, by controlling the output voltage changes to achieve frequency control. Select the specific circuit, according to the theoretical analysis of the relevant parameters. Using Matlab software to build simulation circuit, the simulation of the data, waveform and theoretical analysis of each other analysis, summed up its characteristics. 【KEYWORDS】PWM ;DC –DC ;DC-AC ; MATLAB simulation
脉宽调制(PWM)的基本原理及其应用实例
脉宽调制(PWM)的基本原理及其应用实例 脉宽调制(PWM)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。 模拟电路 模拟信号的值可以连续变化,其时间和幅度的分辨率都没有限制。9V电池就是一种模拟器件,因为它的输出电压并不精确地等于9V,而是随时间发生变化,并可取任何实数值。与此类似,从电池吸收的电流也不限定在一组可能的取值范围之内。模拟信号与数字信号的区别在于后者的取值通常只能属于预先确定的可能取值集合之内,例如在{0V, 5V}这一集合中取值。 模拟电压和电流可直接用来进行控制,如对汽车收音机的音量进行控制。在简单的模拟收音机中,音量旋钮被连接到一个可变电阻。拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之增加或减少,从而改变了驱动扬声器的电流值,使音量相应变大或变小。与收音机一样,模拟电路的输出与输入成线性比例。 尽管模拟控制看起来可能直观而简单,但它并不总是非常经济或可行的。其中一点就是,模拟电路容易随时间漂移,因而难以调节。能够解决这个问题的精密模拟电路可能非常庞大、笨重(如老式的家庭立体声设备)和昂贵。模拟电路还有可能严重发热,其功耗相对于工作元件两端电压与电流的乘积成正比。模拟电路还可能对噪声很敏感,任何扰动或噪声都肯定会改变电流值的大小。 数字控制 通过以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗。此外,许多微控制器和DSP已经在芯片上包含了PWM控制器,这使数字控制的实现变得更加容易了。 简而言之,PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。 图1显示了三种不同的PWM信号。图1a是一个占空比为10%的PWM输出,即在信号周期中,10%的时间通,其余90%的时间断。图1b和图1c显示的分别是占空比为50%和90%的PWM 输出。这三种PWM输出编码的分别是强度为满度值的10%、50%和90%的三种不同模拟信号值。例如,假设供电电源为9V,占空比为10%,则对应的是一个幅度为0.9V的模拟信号。 图2是一个可以使用PWM进行驱动的简单电路。图中使用9V电池来给一个白炽灯泡供电。如果将连接电池和灯泡的开关闭合50ms,灯泡在这段时间中将得到9V供电。如果在下一个50ms中将开关断开,灯泡得到的供电将为0V。如果在1秒钟内将此过程重复10次,灯泡将会点亮并象连接到了一个4.5V电池(9V的50%)上一样。这种情况下,占空比为50%,调制频率为10Hz。 大多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz。设想一下如果灯泡先接通5秒再断开5秒,然后再接通、再断开……。占空比仍然是50%,但灯泡在头5秒钟内将点亮,在下一个5秒钟内将熄灭。要让灯泡取得4.5V电压的供电效果,通断循环周期与负载对开关状态变化的响应时间相比必须足够短。要想取得调光灯(但保持点亮)的效果,必须提高调制频率。在其他PWM应用场合也有同样的要求。通常调制频率为1kHz到200kHz之间。
数字PWM直流调速设计
容摘要 本文是基于对直流电机PWM调速器设计的研究,主要实现对直流电机的控制。本设计主要是实现PWM调速器的正转、反转、减速、加速、停止的五大操作。并实现电路的仿真并设计实际电路进行控制。为实现系统的微机控制,在设计中,采用STC89C5单片机作为整个控制系统的控制电路的核心部分,驱动模块,实现通过PWM波对电动机转速参数的改变和测量;由命令输入模块、H型驱动模块组成。采用带中断的独立式键盘作为命令的输入,单片机在程序控制下,不断给电路发送PWM波形,完成电机正反转控制.是通过H型驱动电路,采用PWM调速方式,通过改变PWM的占空比从而改变电动机的电枢电压,进而实现对电动机的调速。设计的整个控制系统,在硬件结构上采用了大量的集成电路模块,大大简化硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。 索引关键词:直流电机调速;H桥驱动电路;LC显示器;51单片机
目录 第一章绪论 (1) 1.1 设计目的 (1) 1.2 设计背景 (1) 1.3 设计容 (1) 第二章数字PWM直流调速系统方案设计 (1) 2.1 直流电动机调速方法 (1) 2.2旋转变流机组缺点 (2) 第三章数字PWM直流调速系统主电路设计 (3) 3.1 主电路结构设计 (3) 3.2 SG3525引脚各端子功能 (4) 第四章数字PWM直流双闭环系统的电路设计 (5) 4.1 转速调节器ASR电路 (5) 4.2 PWM脉宽控制电路 (6) 后记 (8) 参考文献: (9)
数字PWM直流调速系统设计 第一章绪论 1.1 设计目的 通过对一个实用控制系统的设计,综合运用科学理论知识,提高工程意识和实践技能,使学生获得控制技术工程的基本训练,培养学生理论联系实际、分析解决实际问题的初步应用能力。近年来,科技发展的越来越快,直流电机具有良好的起动特性和调速特性。其中调速平滑,方便,可实现频繁的无极快速起动、制动和反转,能承受很大负载,需要满足生产过程自动化系统各种不同的特殊要求,但是随着科学技术的不断发展,PWM波调速的3 方法的发现,以及温度漂移等。而用PWM技术后,避免上述的缺点,不仅简化了电路还实现了通过电力电子器件改变开关频率,提高系统的稳定性还有抗干扰能力。随着我国经济和文化事业的发展,科技的进步,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、火箭、雷达、战车等场合。 1.2 设计背景 在电气行业中,随着各项技术水平的不断提高,使得传统工艺有了深层次的提高,对人类的生产与生活,产生了深刻且深远的影响,已经与我们息息相关。当需要良好的启动,制动性能,并需要大围平滑调速时,直流电机是一个很好地选择非线性集成电路以及少量的数字电路组成的直流电机调速控制系统大多数都为早减小模拟信号控制间相互干扰,减小模拟信号产生温漂等不稳定因素。。它的发展趋势将是向大容量、高性能化、外围电路装化等方面发展。 1.3 设计容 近年来,科技发展的越来越快,直流电机具有良好的起动特性和调速特性。其中调速平滑,方便,可实现频繁的无极快速起动、制动和反转,能承受很大负载,需要满足生产过程自动化系统各种不同的特殊要求,但是随着科学技术的不断发展,PWM波调速的3 方法的发现,以及温度漂移等。而用PWM技术后,避免上述的缺点,不仅简化了电路还实现了通过电力电子器件改变开关频率,提高系统的稳定性还有抗干扰能力。随着我国经济和文化事业的发展,科技的进步,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、火箭、雷达、战车等场合。 第二章数字PWM直流调速系统方案设计 2.1 直流电动机调速方法 直流电动机的调速方法有种: (1)调节电枢供电电压U。改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩调速方法。对于要求在一定围无级平滑调速的系统来说,这种方法最好。 I变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。 a
正弦脉宽调制控制
为了使变压变频器输出交流电压的波形近似为正弦波,使电动机的输出转矩平稳,从而获得优秀的工作性能,现代通用变压变频器中的逆变器都是由全控型电力电子开关器件构成,采用脉宽调制(pulse width modulation, 简称pwm ) 控制的,只有在全控器件尚未能及的特大容量时才采用晶闸管变频器。应用最早而且作为pwm控制基础的是正弦脉宽调制(sinusoidal pulse width modulation, 简称spwm)。 图3-1 与正弦波等效的等宽不等幅矩形脉冲波序列 3.1 正弦脉宽调制原理 一个连续函数是可以用无限多个离散函数逼近或替代的,因而可以设想用多个不同幅值的矩形脉冲波来替代正弦波,如图3-1所示。图中,在一个正弦半波上分割出多个等宽不等幅的波形(假设分出的波形数目n=12),如果每一个矩形波的面积都与相应时间段内正弦波的面积相等,则这一系列矩形波的合成面积就等于正弦波的面积,也即有等效的作用。为了提高等效的精度,矩形波的个数越多越好,显然,矩形波的数目受到开关器件允许开关频率的限制。 在通用变频器采用的交-直-交变频装置中,前级整流器是不可控的,给逆变器供电的是直流电源,其幅值恒定。从这点出发,设想把上述一系列等宽不等幅的矩形波用一系列等幅不等宽的矩形脉冲波来替代(见图3-2),只要每个脉冲波的面积都相等,也应该能实现与正弦波等效的功能,称作正弦脉宽调制(spwm)波形。例如,把正弦半波分作n等分(在图3-2中,n=9),把每一等分的正弦曲线与横轴所包围的面积都用一个与此面积相等的矩形脉冲来代替,矩形脉冲的幅值不变,各脉冲的中点与正弦波每一等分的中点相重合,这样就形成spwm波形。同样,正弦波的负半周也可用相同的方法与一系列负脉冲波等效。这种正弦波正、负半周分别用正、负脉冲等效的spwm 波形称作单极式spwm。
LPC2378学习笔记之脉冲宽度调制器(PWM)
PWM波的用途: 可以做步进电机的调速、可以通过无缘蜂鸣器播放音乐、可以通过滤波的方法做DA转换,还可以控制灯的亮度,就这些了吧,对了还可以做信号调制。一般用于电机调速,还有开关电源,。PWM波就是占空比传函,改变脉宽可以输出一系列的平均电压系列。 PWM波的产生形式: Pulse Width Modulation -- 脉宽调制/脉冲宽度调制。脉冲宽度调制(PWM)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。脉宽调制是开关型稳压电源中的术语。这是按稳压的控制方式分类的,除了PWM型,还有PFM 型和PWM、PFM混合型。脉宽调制式开关型稳压电路是在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。PWM一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。 PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。 许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作: * 设置提供调制方波的片上定时器/计数器的周期 * 在PWM控制寄存器中设置接通时间 * 设置PWM输出的方向,这个输出是一个通用I/O管脚 * 启动定时器 * 使能PWM控制器 PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。 对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。从模拟信号转向PWM可以极大地延长通信距离。在接收端,通过适当的RC或LC网络可以滤除调制高频方波并将信号还原为模拟形式。
PWM波形生成基础学习知识原理
脉宽调制(Pulse-Width Modulation,PWM)技术在电力电子领域的应用极其广泛。PWM模式是决定逆变器输出电压特性的根本。性能优越的PWM模式可以使逆变器具有良好的输出特性。由傅里叶分析可知,不对称波形会带来大量低次谐波、偶次谐波以及余弦项。因此PWM脉冲波形的对称性对输出特性有很大影响。 PWM的实现方法一般有两种:比较法和计算法。随着数字技术的迅速发展和计算机功能的提高,计算法以其方便灵活的特点成为PWM实现方法的主流。采用计算法实现PWM时,按照每个载波周期内调制波的取法,可以分为规则采样PWM和自然采样PWM。其中,采用规则采样法,计算简单,占用系统软件资源较少,因而应用比较广泛;但是由规则采样法计算出的PWM 波形,在系统载波频率较低时,输出精度差,并且在计算时需要通过查表确定计算结果,所以并不能保证其波形的对称性,谐波含量也会因为波形的不对称而增加。 对于调制类PWM,有三种方式:同步调制,异步调制,分段同步调制三种方式。同步调制虽然可以在调制波频率变化的所有范围内,载波与调制波的相位相同, PWM波形一直保持对称,输出谐波的低次谐波可以得到消除。但是在载波频率变化范围大时,电力
电子器件的开关频率变化范围大,在低频时,将给系统引入大量较低频率的谐波。异步调制的优点在于载波频率在调速过程中载波不变,高次谐波对系统的影响基本固定,可以弥补同步调制的缺点。但是异步调制无法在大部分频率点上都保证调制波与载波相位相对的固定,出现不对称波形,会给系统引入大量的低次谐波、偶次谐波和余弦项。分段同步调制可以综合以上两种方式的优点,但在波比切换时可能出现电压突变,甚至震荡。基于以上理论,本文提出一种新的PWM算法,可以在异步调制下,使PWM波形在T/2周期内始终保持关于T/4 周期的完全对称。 1 PWM算法原理 在用数字化控制技术产生PWM脉冲时,三角载波实际上是不存在的,完全由软件及硬件定时器代替,图1为三角载波的产生原理(Ttimer为定时器的值)用阶梯波代替模拟三角波。PWM脉冲的产生机理为:定时器重复按照PWM周期进行计数。比较寄存器用于保持调制值,比较寄存器中的值与定时器计数器的值相比较,当两个值匹配时, PWM输出就会跳变;当两个值产生二次匹配或者一个定时器的周期结束时,就会产生第二次输出跳变。通过这种方式就会产生一个周期与比较寄存器值成比例的脉冲信号。在比较单元中
SPWM脉宽调制控制系统设计
SPWM脉宽调制控制系统设计 一、作品名称:SPWM脉宽调制控制系统设计 二、原理:脉宽控制技术(PWM)是非常重要的电力电子控制技术,对提高电力电子装置的性能,促进电力电子技术的发展有着巨大的推动作用。其中,正弦脉宽调制技术(SPWM)是应用最广泛的PWM 技术。 SPWM(Sinusoidal PWM)在高性能电机驱动、步进电机细分控制、变频电源、电力电子逆变控制等方面有重要的应用。特别是随着FPGA技术进入这一行业,使SPWM技术的应用更有了长足的进步,使其得到了更高效、更深入和更广泛的应用。 相对于空间矢量PWM、随机采样PWM、电流滞环PWM、自然采样PWM、等面积采样PWM或规则采样等方式的PWM,正弦采样的PWM在逆变控制等技术应用中,产生的谐波含量最小,因此应用也最广泛。数字方式产生SPWM 波的原理如图1-1所示,其中等腰三角波是载波,正弦波是调制波,当这两路信号经过一个数字比较器后输出图1-1下方的脉冲波形,即SPWM波。当正弦波大于三角波时,比较器输出1,反之输出0。三角波与正弦波的频率比称为载波比;它们的频率如果等比例增减则为同步调制方式,否则就是异步调制方式。载波频率通常为数十KHz,载波比为数百。图1-6是基于5E+系统的SPWM波发生器的基本电路图。其中PLL20输出两路时钟,一路C0,输出3.6MHz,为三角波信号发生器提供载波时钟;另一路C1输出200kHz,为正弦波调制信号提供时钟。CNT10B是10位计数器,其一为三角波发生模块TRANG提供递增数据。另一CNT10B是正弦波数据ROM的地址发生器。ROM10模块的数据可用生成的mif 生成器产生,深度是1024,数据宽度是10位。当下载图1-6的设计于5E+系统后,利用逻辑分析仪进行分析,看SignalTap II实测的波形与图1-1的波形是否有很好的对应关系。 图1-1 SPWM波生成原理图 三、步骤
基于CPLD的PWM发生器设计
第32卷 第6期 2010-6 【151】 基于CPLD的PWM发生器设计 A PWM generator designed with CPLD 耿伟松,于海东 GENG Wei-song, YU Hai-dong (扬州大学 能源与动力工程学院,扬州 225009) 摘 要:H形桥式变换器在多种动力系统中有着广泛的应用。在电机控制中,H桥中开关的控制一般采 用PWM控制技术。采用VHDL硬件描述语言设计了基于CPLD的PWM发生器,并使用Max+PlusⅡ进行仿真验证,仿真结果验证了设计的正确性。设计中采用了一种巧妙的方法来实现,其原理简单。基于CPLD的PWM发生器将会简化控制系统的硬件和软件设计,获得更高的开关频率,其应用这将大大简化直流电机控制系统的设计并且改善系统的控制性能。 关键词:H桥;PWM发生器;CPLD;VHDL;Max+ Plus Ⅱ 中图分类号:TM383.6 文献标识码:B 文章编号:1009-0134(2010)06-0151-03Doi: 10.3969/j.issn.1009-0134.2010.06.50 0 引 言 自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制的高频开关控制方式,形成了直流P W M 调速系统[1]。脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而改变平均输出电压的大小,以调节电机转速。 PWM变换器电路有多种形式,可分为可逆和不可逆两大类。其中可逆PWM变换器主电路有多种形式,最常用的是桥式(H形)电路。桥式变换器在许多动力系统中得到了广泛的应用(如直流驱动,直流-交流逆变器,开关电源等等)。 1 PWM 发生器的设计 桥式变换器应用在直流电机调速系统中的主要电路结构如图1所示,开关控制基本上采用 PWM技术。 图1 桥式变换器原理图 PWM信号发生器一般是通过模拟电路或者是 基于微处理器的软件控制技术来实现,但随着高速开关器件的涌现,对于复杂的调制技术,即使采用最先进的DSP(数字信号处理器)也很难实现。 随着超大规模集成电路的集成度和工艺水平的不断提高,专用集成电路ASIC的设计成本在不断降低。CPLD/FPGA是实现ASIC的主流器件,它们具有极大的灵活性和通用性,工作速度快,开发效率高,成本低,可靠性好。近年来,CPLD在电机控制系统中的应用收到了系统设计人员越来越多的重视。用CPLD来设计PWM发生器将会简化控制系统的硬件和软件设计,获得更高的开关频率,减少微处理器的计算工作量。 VHDL具有与具体硬件电路无关和与设计平台无关的特性,并且具有良好的电路行为描述和系统描述的能力,并在语言易读性和层次化、结构化设计方面表现了强大的生命力和应用潜力[2],因此本文选用VHDL语言进行编程,用一片CPLD设计了PWM发生器。 由于桥式PWM变换器的工作状态是确定的,所以采用状态机方式来编程[3]也是情有可原,虽然只有六个状态,但其程序实现起来是很复杂的。用数字比较器代替模拟比较器、用线性计数器代替锯齿波发生器来产生PWM信号[4,5]的设计方法也很繁琐。在分析了桥式PWM变换器工作原理的基础上,本文采用了一种巧妙的方法来设计,其原理简单,程序容易实现。 收稿日期:2010-03-24 作者简介:耿伟松(1990-),男,江苏连云港人,本科在读,研究方向为电气工程及自动化。
正弦脉宽调制
正弦脉宽调制(SPWM)控制 为了使变压变频器输出交流电压的波形近似为正弦波,使电动机的输出转矩平稳,从而获得优秀的工作性能,现代通用变压变频器中的逆变器都是由全控型电力电子开关器件构成,采用脉宽调制(pulse width modulation, 简称pwm ) 控制的,只有在全控器件尚未能及的特大容量时才采用晶闸管变频器。应用最早而且作为pwm 控制基础的是正弦脉宽调制(sinusoidal pulse width modulation, 简称spwm)。 图3-1 与正弦波等效的等宽不等幅矩形脉冲波序列 3.1 正弦脉宽调制原理 一个连续函数是可以用无限多个离散函数逼近或替代的,因而可以设想用多个不同幅值的矩形脉冲波来替代正弦波,如图3-1所示。图中,在一个正弦半波上分割出多个等宽不等幅的波形(假设分出的波形数目n=12),如果每一个矩形波的面积都与相应时间段内正弦波的面积相等,则这一系列矩形波的合成面积就等于正弦波的面积,也即有等效的作用。为了提高等效的精度,矩形波的个数越多越好,显然,矩形波的数目受到开关器件允许开关频率的限制。
在通用变频器采用的交-直-交变频装置中,前级整流器是不可控的,给逆变器供电的是直流电源,其幅值恒定。从这点出发,设想把上述一系列等宽不等幅的矩形波用一系列等幅不等宽的矩形脉冲波来替代(见图3-2),只要每个脉冲波的面积都相等,也应该能实现与正弦波等效的功能,称作正弦脉宽调制(spwm)波形。例如,把正弦半波分作n等分(在图3-2中,n=9),把每一等分的正弦曲线与横轴所包围的面积都用一个与此面积相等的矩形脉冲来代替,矩形脉冲的幅值不变,各脉冲的中点与正弦波每一等分的中点相重合,这样就形成spwm波形。同样,正弦波的负半周也可用相同的方法与一系列负脉冲波等效。这种正弦波正、负半周分别用正、负脉冲等效的spwm波形称作单极式spwm。 图3-2 spwm波形
SG3525脉宽调制型控制器
SG3525脉宽调制型控制器是美国通用电气公司的产品,作为SG3524的改进型,更适合于运用MOS管作为开关器件的DC/DC变换器,它是采用双级型工艺制作的新型模拟数字混合集成电路,性能优异,所需外围器件较少。它的主要特点是:输出级采用推挽输出,双通道输出,占空比0-50%可调.每一通道的驱动电流最大值可达200mA,灌拉电流峰值可达500mA。可直接驱动功率MOS管,工作频率高达400KHz,具有欠压锁定、过压保护和软启动等功能。该电路由基准电压源、震荡器、误差放大器、PWM比较器与锁存器、分相器、欠压锁定输出驱动级,软启动及关断电路等组成,可正常工作的温度范围是0-700C。基准电压为5.1 V士1%,工作电压范围很宽,为8V到35V. SG3525采用16端双列直插DIP封装,引脚图及各端子功能介绍如下:图形如图 GROUND(接地端):该芯片上的所有电压都是相对于GROUND而言,即是功率地也是信号地。在实验电路中,由于接入误差放大器反向输入端的反馈电压也是相对与12脚而言,所以主回路和控制回路的接地端应相连。 +VIN(芯片电源端):直流电源从15脚引入分为两路:一路作为内部逻辑和模拟电路的工作电压;另一路送到基准电压稳压器的输入端,产生5.1士1%V的内部基准电压。如果该脚电压低于门限电压(Turn-off: 8V),该芯片内部电路锁定,停止工作‘基准源及必要电路除外)使之消耗的电流降至很小(约2mA)e 另外,该脚电压最大不能超过35V.使用中应该用电容直接旁路到GROUND端。VC(推挽输出电路电压输入端):作为推挽输出级的电压源,提高输出级输出功率。可以和15脚共用一个电源,也可用更高电压的电源。电压范围是1. 8V-3. 4V INV. INPUT(反相输入端):误差放大器的反相输入端,该误差放大器的增益标称值为80db,其大小由反馈或输出负载来决定,输出负载可以是纯电阻,也可以是电阻性元件和电容元件的组合。该误差放大器共模输入电压范围是1. 5V-5. 2V。此端通常接到与电源输出电压相连接的电阻分压器上。负反馈控制时,将电源输出电压分压后与基准电压相比较。 NI. INPUT同相输入端):此端通常接到基准电压16脚的分压电阻上,取得2. 5V的基准比较电压与INV. INPUT端的取样电压相比较。 SYNC(同步端):为外同步用。需要多个芯片同步工作时,每个芯片有各自的震荡频率,可以分别他们的4脚和3脚相连,这时所有芯片的工作频率以最快的芯片工作频率同步。也可以使单个芯片以外部时钟频率工作。 OSC. OUTPUT(同步输出端):同步脉冲输出。作为多个芯片同步工作时使用。但几个芯片的工作频率不能相差太大,同步脉冲频率应比震荡频率低一些。如不需多个芯片同步工作时,3脚和4脚悬空。4脚输出频率为输出脉冲频率的2倍。输出锯齿波电压范围为0. 6V到3. 5V. Cr(震荡电容端):震荡电容一端接至5脚,另一端直接接至地端。其取值范围为0.001,u F到0. 1 u F。正常工作时,在Cr两端可以得到一个从0.6V到3. 5V变化的锯齿波。 Rr(震荡电阻端):震荡电阻一端接至6脚,另一端直接接至地端。Rr的阻值决定了内部恒流值对Cr充电。其取值范围为2K欧到150K欧Rr和Cr越大充电时间越长,反之则充电时间短。DISCHATGE RD(放电端):Cr的放电由5. 7两端的死区电阻决定。把充电和放电回路分开,有利与通过死区电阻来调节死区时间,使死区时间调节范围更宽。其取值范围为0欧到500欧。放电电阻RD和CT越大放电时间越长,反之则放电时间短。 SOFTSTATR(软启动):比较器的反相端即软启动器控制端8,端8可外接软启动电容?该电容由内部Vf的50uA恒流源充电。 VREF(基准电压端):基准电压端16脚的电压由内部控制在5. 1 V土1%。可以分压后作为误差放大器的参考电压。 OUTPUT A, OUTPUT B(脉冲输出端):输出末级采用推挽输出电路,驱动场效应功率管时关
某脉宽调制数字快速电磁阀方案设计及仿真研究
某脉宽调制数字快速电磁阀方案设计及仿真研究 摘要:脉宽调制数字快速电磁阀作为重要的电液转换元件,在燃油控制系统的作用日益突出。针对断电常开型快速电磁阀的需求,开展断电常开型脉宽调制数字快速电磁阀的方案设计及仿真研究,并通过工程验证使该脉宽调制数字快速电磁阀的设计方案得到优化。 0.概述 航空发动机燃油控制系统的控制方式,已由原机械液压控制调节方式向电子控制调节方式发展,其核心关键是机电液转换元件。 近年来,由于脉宽调制数字快速电磁阀(以下简称快速电磁阀)在航空发动机燃油控制中的广泛使用,其经常被作为航空发动机燃油调节系统的执行部件。快速电磁阀多采用脉宽调制(PWM)来控制,利用脉冲占空比的变化来调节阀口开关的时间,使得快速电磁阀能像其它数字流量电磁阀一样,对燃油流量进行连续的控制。虽然普通的电磁阀也具有同样的数字开关特征,但是普通的电磁阀响应特性较慢,而快速电磁阀体积小、重量轻、响应速度快、稳定性好、控制精度高。 本文以某喷口加力调节器用快速电磁阀的需求为研究背景,进行了快速电磁阀方案设计及仿真工作,并对断电常0开型快速阀的设计方案进行了优化。 1.工作原理分析及结构设计方案 1.1 电磁阀结构及工作原理 高速数字电磁阀作为航空发动机电子控制系统的电液转换装置,是电子控制器的关键执行元件(见图1)。主要工作原理为:在断电情况下,挡板活门在铁芯弹簧力作用下关闭活门座,电磁阀进口和出口处于关闭状态;当线圈通电时,电磁力克服铁芯弹簧力使活门座打开,使电磁阀进口和出口处于相通状态,属于断电关闭型阀门。 图1 某定型快速阀结构图 注:1-活门座2-活门弹簧3-挡板活门4-铁芯顶头5-铁芯弹簧 该快速电磁阀采用“喷嘴-挡板”结构,其优点是技术成熟,加工容易实现,耐污染能力好,但结构不紧凑,长时间使用挡板磨损严重,且不满足航空发动机使用中断电长开的要求,需要对该电磁阀进行适当改进。
正弦脉宽调制(SPWM)控制
正弦脉宽调制(SPWM)控制 2010-09-18ylw527+关注献花(4) 为了使变压变频器输出交流电压的波形近似为正弦波,使电动机的输出转矩平稳,从而获得优秀的工作性能,现代通用变压变频器中的逆变器都是由全控型电力电子开关器件构成,采用脉宽调制(pulse width modulation, 简称pwm ) 控制的,只有在全控器件尚未能及的特大容量时才采用晶闸管变频器。应用最早而且作为pwm控制基础的是正弦脉宽调制(sinusoidal pulse width modulation, 简称spwm)。 图3-1 与正弦波等效的等宽不等幅矩形脉冲波序列 3.1 正弦脉宽调制原理 一个连续函数是可以用无限多个离散函数逼近或替代的,因而可以设想用多个不同幅值的矩形脉冲波来替代正弦波,如图3-1所示。图中,在一个正弦半波上分割出多个等宽不等幅的波形(假设分出的波形数目n=12),如果每一个矩形波的面积都与相应时间段内正弦波的面积相等,则这一系列矩形波的合成面积就等于正弦波的面积,也即有等效的作用。为了提高等效的精度,矩形波的个数越多越好,显然,矩形波的数目受到开关器件允许开关频率的限制。 在通用变频器采用的交-直-交变频装置中,前级整流器是不可控的,给逆变器供电的是直流电源,其幅值恒定。从这点出发,设想把上述一系列等宽不等幅的矩形波用一系列等幅不等宽的矩形脉冲波来替代(见图3-2),只要每个脉冲波的面积都相等,也应该能实现与正弦波等效的功能,称作正弦脉宽调制(spwm)波形。例如,把正弦半波分作n等分(在图3-2中,n=9),把每一等分的正弦曲线与横轴所包围的面积都用一个与此面积相等的矩形脉冲来代替,矩形脉冲的幅值不变,各脉冲的中点与正弦波每一等分的中点相重合,这样就形成spwm波形。同样,正弦波的负半周也可用相同的方法与一系列
课程设计振幅调制解调器的设计
AM振幅调制解调器的设计与仿真 目录 1.课程设计的目的 (2)
2.课程设计的内容 (2) 3.课程设计的原理 (2) 4.课程设计的步骤或计算 (4) 5.课程设计的结果与结论 (8) 6.参考文献 (9) 一.课程设计的目的 目的:通过课程设计,使学生加强对高频电子技术电路的理解,学会查寻资料﹑方案比较,以及设计计算等环节。进一步提高分析解决实际问题的能力,创造一个动脑动手﹑独立开展电路实验的机会,锻炼分析﹑解决高频电子电路问题的实际本领,真正实现由课本知识向实际能力的转化;通过典型电路的设计与制作,加深对基本原理的了解,增强学生的实践能力。
二. 课程设计的内容 1、 AM振幅调制解调器的设计 (1)AM振幅调制解调器的设计 设计要求:用模拟乘法器MC1496设计一振幅调制器,使其能实现AM信号调制主要指标:载波频率:15MHz 正弦波调制信号:1KHz 正弦波 输出信号幅度:大于等于5V(峰峰值)无明显失真 (2)AM信号同步检波器 设计要求:用模拟乘法器MC1496设计一AM信号同步检波器 主要指标:输入AM信号:载波频率15MHz 正弦波,调制信号:1KHz 正弦波,幅度大于1V,调制度为60%。输出信号:无明显失真,幅度大于5V。 三. 课程设计原理
1. MC1496模拟乘法器 MC1496是双平衡四象限模拟乘法器。其内部电路和引脚如下图(a)(b)所示。其中VT1,VT2与VT3,VT4组成双差分放大器,VT5,VT6组成的单差分放大器用以激励VT1~VT4。VT7、VT8及其偏置电路组成差分放大器、的恒流源。引脚8与10接输入电压UX,1与4接另一输入电压Uy,输出电压U0从引脚6与12输出。引脚2与3 外接电阻RE,对差分放大器VT5、VT6 产生串联电流负反馈,以扩展输入电压Uy的线性动态范围。引脚14为负电源端(双电源供电时)或接地端(单电源供电使),引脚5外接电阻R5。用来调节偏置电流I5及镜像电流I0的值。 MC1496的内部电路图及引脚电路 2. 振幅调制 振幅调制是使载波信号的峰值正比于调制信号的瞬时值的变换过程。通常载