技术系统进化与技术预测

赵新军 ? all right reserved 2015.03 四川
第6部分 技术系统进化与技术预测 6.1 概述
6.2 技术进化过程实例分析 6.3 技术系统进化规律 6.4 技术成熟度预测方法 6.5 工程实例分析
赵新军 ? all right reserved 2015.03 四川
为应付领导检查
突击建体育场弯道变直角
赵新军 ? all right reserved 2015.03 四川
3
6.1 概述
?从历史的观点研究一类产品,会发现这些产品今天的实现形式与其刚诞生时相比已有很大的或根本性的变化。但这些产品的主要功能并没有变化。
?如:汽车与自行车的主要功能是“运送货物与人”
?计算机的主要功能是“代替人进行计算”
?机床的主要功能是“加工零件”。
?既从历史的观点看,产品处于进化之中。
赵新军 ? all right reserved 2015.03 四川
技术性能随时间变化的规律
S —曲线 分段S —曲线
赵新军 ? all right reserved 2015.03 四川 6.2 技术进化过程实例分析
?运动员跳高技术的进化
?自行车进化实例分析 ?
电话和手机进化演进分析
?
提高运输速度的技术进化曲线
赵新军 ? all right reserved 2015.03 四川
6.2.1 运动员跳高技术的进化
?
男子世界纪录:古巴的索托马约尔保持室外世界跳高纪录2.45米和室内世界跳高纪录2.43米
?
女子世界纪录: 保加利亚的科斯塔迪诺娃保持室外世界跳高纪录2.09米,德国的亨克尔保持室内世界跳高纪录2.07米
?历史上最高的人罗伯特·珀欣·瓦德卢2.72米。 ?
足球比赛中球门横梁的高度是2.44米。
赵新军 ? all right reserved 2015.03 四川
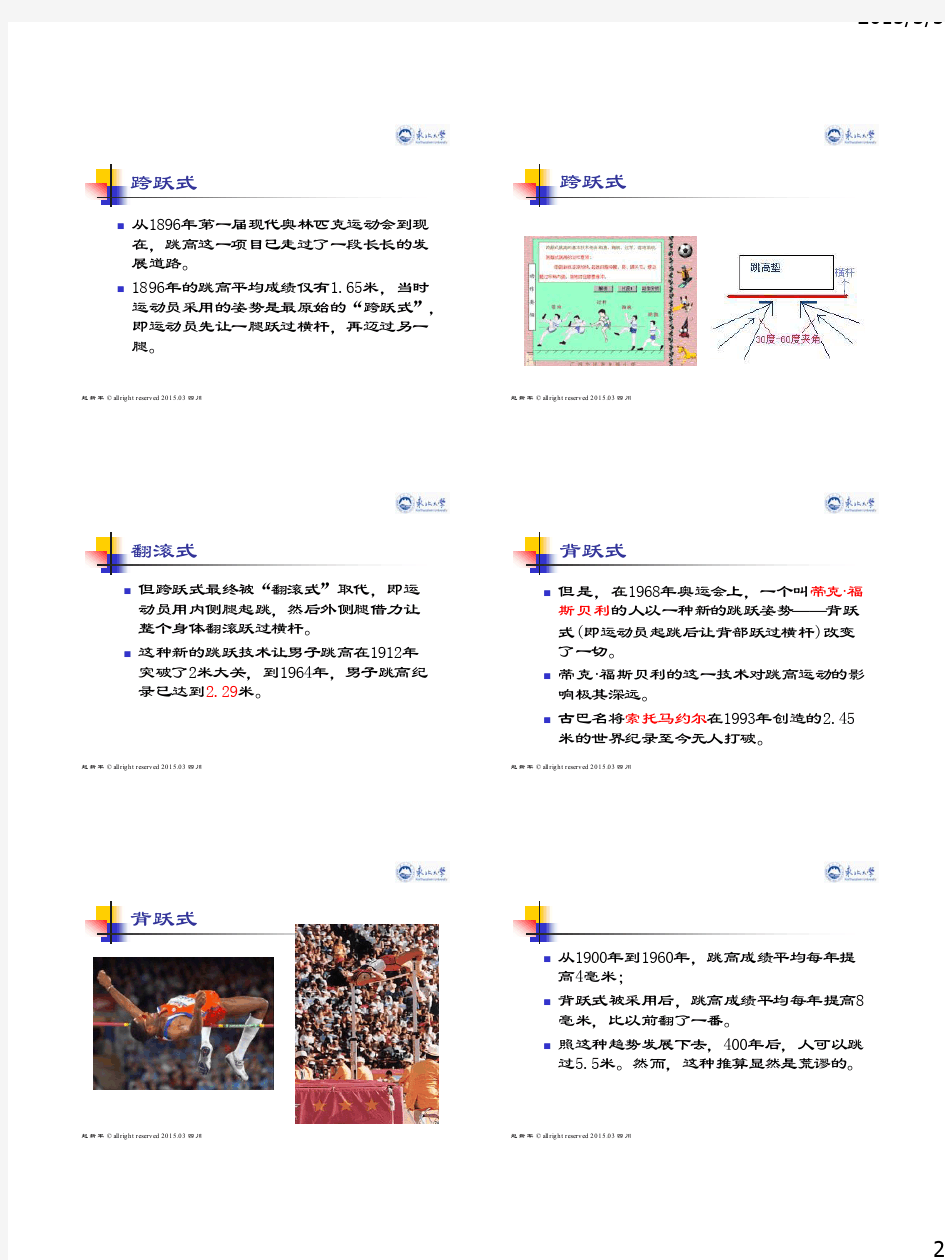
跨跃式
?
从1896年第一届现代奥林匹克运动会到现在,跳高这一项目已走过了一段长长的发展道路。
?
1896年的跳高平均成绩仅有1.65米,当时运动员采用的姿势是最原始的“跨跃式”,即运动员先让一腿跃过横杆,再迈过另一腿。
赵新军 ? all right reserved 2015.03 四川
跨跃式
赵新军 ? all right reserved 2015.03 四川 翻滚式
?
但跨跃式最终被“翻滚式”取代,即运动员用内侧腿起跳,然后外侧腿借力让整个身体翻滚跃过横杆。
?
这种新的跳跃技术让男子跳高在1912年突破了2米大关,到1964年,男子跳高纪录已达到2.29米。
赵新军 ? all right reserved 2015.03 四川
背跃式
?
但是,在1968年奥运会上,一个叫蒂克·福斯贝利的人以一种新的跳跃姿势——背跃式(即运动员起跳后让背部跃过横杆)改变了一切。 ?
蒂克·福斯贝利的这一技术对跳高运动的影响极其深远。
?
古巴名将索托马约尔在1993年创造的2.45米的世界纪录至今无人打破。
赵新军 ? all right reserved 2015.03 四川 背跃式
赵新军 ? all right reserved 2015.03 四川
?
从1900年到1960年,跳高成绩平均每年提高4毫米;
?
背跃式被采用后,跳高成绩平均每年提高8毫米,比以前翻了一番。
?
照这种趋势发展下去,400年后,人可以跳过5.5米。然而,这种推算显然是荒谬的。
赵新军 ? all right reserved 2015.03 四川 人和动物在跳高上的差别
?
一般人现在能跳过平均身高的20%,实在不算高;
?袋鼠能跳过2.75米,是它身高的2倍; ?
企鹅能跳过2米,大约是它身高的2.5倍; ?
美洲狮能跃起4.5米,那是它身高的5倍;
赵新军 ? all right reserved 2015.03 四川
人和动物在跳高上的差别
?
一条大西洋大马哈鱼也能从水面跃起4.5米,这是它身长的6倍;
赵新军 ? all right reserved 2015.03 四川
人和动物在跳高上的差别
?
最不起眼的跳蚤无疑是地球上的跳高冠军,它能跳起23厘米,听起来也许不算高,但这一高度却是它身高的200倍—折算成人如果也能跳出同样水平的话,那就意味着我们一跳就能跃上帝国大厦的观景台了。
赵新军 ? all right reserved 2015.03 四川
人和动物在跳高上的差别
?
最新试验表明六毫米长的沫蝉,弹跳一次就可以轻松超过与它身体高度相当的物体。已经超过了先前人们普遍承认的昆虫界的跳高冠军跳蚤。
?
沫蝉后腿内存在有大量的肌肉,可以在瞬间释放出储存在肌肉内的能量。
?
数据显示沫蝉的最高跳跃高度可达70厘米,相当于一个中等身高的人体跳上一座210米高的摩天大楼。
赵新军 ? all right reserved 2015.03 四川
6.2.2 自行车进化实例分析
?自行车是1817年发明的。称为“木房子”的第一辆自行车由机架及木制的轮子组成,没有手把,骑车人的脚是驱动
动力。从工程的观点看,该车不舒适、不能转向等。 ?1861年,基于“木房子”的新一代自形车设计成功,该车是现在所说的“早期脚踏车”,“木房子”的缺点依然存在。
?1870年,被称为“Ariel ”的自行车车设计成功,该车前轮安
装在一个垂直的轴上,使转向成为可能,但依然不安全、不舒适、驱动困难。
赵新军 ? all right reserved 2015.03 四川
自行车实例分析
?1879年,脚登驱动、链轮及链条传动的自行车设计成功,该类车的速度可以达到很高,但该类自行车没有车闸,因此高速骑车时很危险。 ?1888年,车闸设计成功,前轮直径已变大,但零部件材料不过关,影响了自行车的速度。 ?20世纪,各种新材料用于自行车零件。
?在自行车进化的过程中,全世界申请了相关专利1万件。
赵
新
军 ? all right
reserved 2015.03 四川
赵新军 ? all right reserved 2015.03 四川
6.2.3 电话形态演进分析
赵新军 ? all right reserved 2015.03 四川 电话形态演进分析
赵新军 ? all right reserved 2015.03 四川
赵新军 ? all right reserved 2015.03 四川 米格-15 与 F-86“佩刀”的相似性
?
乌·乌·斯特鲁明斯基院士谈到了一个乍看起来惊人的巧合事件。
?
在朝鲜战争期间,美国侵占了朝鲜,前苏联则以自己的空军力量支援朝鲜。当时最新的前苏联战斗机米格—15第一次在实战中投入使用— 在对美战争中它给人留下了无比惊奇的印象。
赵新军 ? all right reserved 2015.03 四川
赵新军 ? all right reserved 2015.03 四川 米格-15 与 F-86“佩刀”的相似性
?
“随后,当米格战斗机征服了朝鲜的天空之后,美国人也推出了他们的新产品——自己的第一批箭翼喷气式歼击机 F-86‘佩刀’。
?
这两架飞机是在两个不同的国家中被制造出来的,而且每一个的研制都是在绝密条件下进行的。 ?
但是当它们在天空中展开战斗的时候,却突然发现,原来两架飞机是那么惊人地相似,甚至它们的零件都罕见地相似……
赵新军 ? all right reserved 2015.03 四川
赵新军 ? all right reserved 2015.03 四川
米格-15 与 F-86“佩刀”的相似性
? 这就是所谓的科学!完全不同的科学家,完全不
同的工程师,完全互相隔绝的状态,但是两个研究得出的结果却异常相近。
? 国家的界限和社会制度的差异也几乎没有影响到技术发展过程的客观性。
? 技术系统发展的客观规律是存在的,这些规律也是可以被人类认识和利用的,从而不必筛选各种方
案就能够有针对性地解决发明问题。
赵新军 ? all right reserved 2015.03 四川
米格-15 与 F-86“佩刀”的相似性
赵新军 ? all right reserved 2015.03 四川 6.2.4 提高运输速度的技术系统S 曲线
1-马车的进化S 曲线
2-滑轨装置车进化S 曲线 3-发动机驱动车进化S 曲线 4-螺旋桨飞机进化S 曲线 5-喷气式飞机进化S 曲线 6-化学燃料火箭进化S 曲线
7-核燃料火箭和利用太阳能驱 动的固体燃料火箭进化S 曲线 8-总体的S 曲线
赵新军 ? all right reserved 2015.03 四川
产品或技术S 曲线族
技 术 性 能
赵新军 ? all right reserved 2015.03 四川
6.3 技术系统进化规律
技术系统进化规律
增加动态性和可控性
系统部件的匹配与不匹配
系统由宏观向微观进化
技术系统的生命周期
增加理想化程度或水平
系统元件的不均衡发展
技术系统以分割实现改进
提高自动化程度,
减少人的介入
技术系统集成化进而简化
系统进化以结构改善为主
技术系统趋于一般化
赵新军 ? all right reserved 2015.03 四川
技术系统进化法则
1.完备性法则
2.能量传递法则
3.协调性法则
4.提高理想度法则
5.动态性进化法则
6.子系统不均衡进化法则
7.向微观级进化法则
8.向超系统进化法则
赵新军 ? all right reserved 2015.03 四川
进化规律1
?
技术系统的生命周期为出生,成长,成熟,退出
?1848年发明了滑翔机 ?
1903莱特兄弟的动力飞机, 48km/h-80km/h ?
1914到1918短短四年时间,80km/h-160km/h ?
飞机进化的分阶段S —曲线
赵新军 ? all right reserved 2015.03 四川
进化规律2:增加理想化水平
?
技术系统是功能的实现,同一功能存在多种 技术实现形式,任何系统在完成所需的功能时,都产生有害功能。为了对正、反两方面作用进行评价,采用如下的公式:
有用功能之和(UF) 理想化度(ID )=
有害功能之和(HF)+成本(C)
赵新军 ? all right reserved 2015.03 四川
Time
ID
S 曲线与理想化度的关系
赵新军 ? all right reserved 2015.03 四川
理想的电熨斗(不倒翁式熨斗)
赵新军 ? all right reserved 2015.03 四川 自修复油漆
Self-repairing paint
?
“擦伤保护膜”包含有一种新开发的高弹性树脂,从而可以有效防止擦伤,以免影响汽车内层的表面。
?
这种“自动修复油漆”使刮伤的汽车表面从一天到一个星期返回其原始状态,这取决于温度和划痕深度。
赵新军 ? all right reserved 2015.03 四川
增加系统理想化的七种方法
增加系统理想化程度或水平
去除双重元件
采用更综合的子系统
去除辅助功能
自服务
去除元件
合并离散子系统
通过整体置换简化系统
赵新军 ? all right reserved 2015.03 四川
39
自服务
?
鸡蛋上如何打上相关信息?
赵新军 ? all right reserved 2015.03 四川
去除元件
使用无壳子弹的自动步枪
赵新军 ? all right reserved 2015.03 四川 工程实例分析:
? 高层建筑擦窗户外部是一件非常困难的工作。常要聘用有资质的人员作此项工作,工作危险且花费很高。 ? 如何擦窗户?
赵新军 ? all right reserved 2015.03 四川
进化规律3:系统元件的不均衡发展
?
不同的系统元件/子系统一般都是沿着自身的进化规律来演变。
?
同样的,不同的系统元件达到自身固有的自然极限所需的次数是不同的。首先达到自然极限的元件就“抑制”了整个系统的发展。它将成为设计中最薄弱的环节。
?
一个不发达的部件也是设计中最薄弱的环节之一。在这些处于薄弱环节的元件得到改进之前,整个系统的改进也将会受到限制。
赵新军 ? all right reserved 2015.03 四川 喜欢被折腾的灯(材料)
赵新军 ? all right reserved 2015.03 四川
进化规律4:增加系统的动态性和可控性
增加系统的动态性
降低系统的稳定性
将固定状态变为可动状
态
系统分割成可动元件
引进一个可动物体
应用物理效应
赵新军 ? all right reserved 2015.03 四川 检测紧密性
赵新军 ? all right reserved 2015.03 四川
水平仪-引进一个可动物体
赵新军 ? all right reserved 2015.03 四川 通过加入铁磁性研磨剂
来有效控制抛光过程
赵新军 ? all right reserved 2015.03 四川
进化规律5:通过集成以增加系统的功能, 然后再逐渐简化系统
建立一个双系统
建立一个选择性双系统
建立一个相似双系统
建立一个相似补偿双系统
具有移换特征的双系统
由相互竞争系统组成的双系统
建立一个牵引双系统
建立一个补偿双系统
建立一个共生双系统
合并具有相反功能的系统
应用二元原则
赵新军 ? all right reserved 2015.03 四川 新型橡皮
赵新军 ? all right reserved 2015.03 四川
减弱高层建筑物的摇摆程度
?水的质量应该是楼房质量的百分之一。 ?水面的波浪可以有效减弱楼房的摇摆。 ?通过这种方法,高40米的塔其摇摆程度可以被减少一半。
赵新军 ? all right reserved 2015.03 四川
赵新军 ? all right reserved 2015.03 四川
Bag TV 上市
赵新军 ? all right reserved 2015.03 四川
进化规律5:通过集成以增加系统的功能, 然后再逐渐简化系统
建立一个多系统
建立一个相似多系统
建立一个具有替换特征的多系统
建立一个由双系统组成的多系统
建立一个动态多系统
赵新军 ? all right reserved 2015.03 四川
多色铅笔
彩色铅笔有一个缺点就是只能画出一种颜色。
现在出现了一种不止一种颜色的彩色铅笔,而是多色铅笔。 在绘画的时候稍稍转动铅笔你就可以得到一会黄线,一会红线,一会蓝线,以会绿线。
特别漂亮的是两种颜色重叠在一起的线——黄线中带有绿色,反之亦然。
另外在绘画时他也可以起到很好的调和作用,是一个颜色平滑的过渡到另外一个颜色。
赵新军 ? all right reserved 2015.03 四川
进化规律6:系统元件匹配和
不匹配的交替出现
?
行军冲突
?汽车悬架系统的发展
a.不匹配元件:拖拉机的车轮在前边,履带在后边。
b.匹配元件:一辆车上安装四个相同的车轮。
c.匹配不当元件:赛车前边的轮子小,后边的轮子大。
d.动态的匹配和不匹配:豪华轿车的两个前轮可以灵活转动。
赵
新
军
? all right reserved 2015.03 四川
新型迷你自行车前轮大后轮小时速20公里
赵新军 ? all right reserved 2015.03 四川 进化规律7:
由宏观系统向微观系统进化
宏观层次
具有简单形状 (球、杆、片等) 的元件组成的系统
由小颗粒(粉末)组成的系统
材料结构 的应用 化学过程 的应用 原子领域 的应用
场能量 的应用
赵新军 ? all right reserved 2015.03 四川
进化规律7:由宏观系统向微观系统进化
赵新军 ? all right reserved 2015.03 四川 光学清晰液体代替传统固体镜头
赵新军 ? all right reserved 2015.03 四川
磁场控制液体镜头
赵新军 ? all right reserved 2015.03 四川
增加动态性及可控性
赵新军 ? all right reserved 2015.03 四川
壁虎足底
似厚粗绒地毯
?
这些簇状纤维好似一条厚粗绒地毯,但实际上,这不过是一只壁虎的多毛足底。 ?
足底微小绒毛数量高达50万,当压在物体表面时,这些绒毛能够产生分子吸力,帮助壁虎紧抓光滑表面甚至可以在天花板上爬行。
?
为了抓起壁虎,你必须使出十倍于它体重的力。
赵新军 ? all right reserved 2015.03 四川
63
美科学家开发新型织物
打造蜘蛛侠式衣服
?
接触物体表面时,微毛可充当粘性极高的“单向粘合剂”,如果朝另一个方向移动,粘性便会消失。
赵新军 ? all right reserved 2015.03 四川
奇思妙想概念家具:
推着桌椅搞清洁
赵新军 ? all right reserved 2015.03 四川
无痛注射
对于某种疾病来说,病人必须一天进行几次注射。科学家在努力减轻注射带来的疼痛。
日本科学家已经研制出来一种用于直径2mm 注射器的针。注射时,这种针只扎出很小的针口并且几乎不会引起疼痛。
发明这种针头的医疗器械公司--“Termo ”承诺这种针头很可能让病人感觉不到任何疼痛。在开发这种特级注射器针头过程中,最重要的问题是提供一个稳定的药液流动环境。公司的专家们通过使用特殊材质的处理针头内部的通道成功地解决这个问题。
赵新军 ? all right reserved 2015.03 四川
但是,一个良好的针头,即使有一个理想化的经过处理的内部管道,药液通过也会是很缓慢。
解决方案:
两个来自乔治亚州技术研究所的美国工程师准备通过合并数以百计超微硅针头来进行注射。
400个凸出的针头,像微电子电路一样被制造出来,安置于一个2.5x2.5mm 的硅板上。如果一个自动的压力送药器连在这个“切碎机”上,并且这个伸长的装置连入人的皮肤上(例如,形如一个表一样或安装成手表一样)就可以慢慢注射一定剂量的药液进入皮肤而不会引起病人任何不适。 更进一步的说,这个用来注射的新装置确保了吊瓶效应—药液被缓慢注入并且呈滴状注入。
赵新军 ? all right reserved 2015.03 四川
美科学家研制出
可杀死肿瘤细胞纳米机器人
?
美国科研人员研发出一种微型纳米粒子,可以通过患者的血流进入肿瘤,然后释放出药物,关掉一种非常重要的癌症基因。
赵新军 ? all right reserved 2015.03 四川
欧洲科学家研制
世界最小四轮纳米车
?
与过去借助扫描显微镜、光或者加热表面的纳米车不同,这种分子车利用电子移动。
赵新军 ? all right reserved 2015.03 四川
进化规律8:提高系统的自动化程度, 减少人的介入
?
不断的改进系统,目的就是希望系统能代替人类完成那些单调乏味的工作,而人类去完成更多的脑力工作。
?
一百年以前,洗衣服就是一件纯粹的体力活,同时还要用到洗衣盆和搓衣板。最初的洗衣机可以减少所需的体力,但是,操作需要很长的时间。全自动洗衣机不仅减少了操作所需的时间还减少了操作所需的体力。
赵新军 ? all right reserved 2015.03 四川
奶嘴体温计 Pacifier thermometer
? 这种温度计巧妙伪装为一个矫正矽胶奶嘴。
? 测量完毕,它会发出哔声,显示器可以发光、易于阅读的,并且具有发烧警报“功能”。
赵新军 ? all right reserved 2015.03 四川 新型床垫:
模拟子宫感觉令婴儿迅速入睡
?
这项发明由多个充气垫组成,可放在现有床垫的下面,在实验中可令婴儿入睡所用时间减少90%。 ?
充气垫中先是轻轻注满空气,然后再放气,模拟一种上下起伏摇摆的运动。 ?
一个可爱的绵羊玩具挂在床头一侧,发出类似母亲心跳的声音,此外还伴随着其他各种声音,如真空吸尘器和竖琴音乐。
赵新军 ? all right reserved 2015.03 四川
?
科学家很久以前便知道,真空吸尘器的噪音可以帮助舒缓婴儿情绪,令其安静下来,因为它听上去类似于子宫发出的嗖嗖声或噪音。 ?
同时,多项研究表明,竖琴音乐也可起到抚慰的作用,让人放松心情。
?
充气垫的活动还有助于让婴儿平躺睡眠,这是医疗机构推荐的6个月以下婴儿最安全的睡姿。 ?
这个新发明名为“Easidream”,是由六个孩子的母亲琳达·哈丁(Lynda Harding)想出来的。
赵新军 ? all right reserved 2015.03 四川
进化规律9:系统的分割
利用分割实现
系统的改进
在分割过程中退化连接
使物体易于拆卸
分割为具有简单形状的零部件
“研磨”物体
赵新军 ? all right reserved 2015.03 四川
由标准件组成的卡车
赵新军 ? all right reserved 2015.03 四川
冰箱叠着用!模块化冰箱!
赵新军 ? all right reserved 2015.03 四川
进化规律10:
系统进化从改善物质的结构入手
改善物体的结构
重新分配物体
局部修改物体
物体的局部替换
应用接触效应
赵新军 ? all right reserved 2015.03 四川
改变表面结构 2D→3D
赵新军 ? all right reserved 2015.03 四川
硬质吸音材料
Absorbing sound with hard materials
? 最好的吸音板是用多孔材料制成的。 ? 但是挪威NTNU 公司的工程师采取了一个相反的方法,使用硬质材料如金属,塑料,玻璃和树脂玻璃来作为吸音的材料。
? 奥秘就在于用声波在金属板上的一个很小的裂缝上适当地摩擦,发生了能量的转化。
? 金属板的厚度不到一毫米,适于室内使用,可以安装在距天花板或墙后面一段距离的地方,以吸收回音和辐射的人的声音。
赵新军 ? all right reserved 2015.03 四川
新型头部保护物
New head protection
? 这个产品看起来就像是一个普通的冬季戴的帽子,但它可以代替头盔。 ? 表面材料是一种硬质的合成纤维。
? 其骨架是高品质、高透气材料,有吸收冲击的作用。
赵新军 ? all right reserved 2015.03 四川
新型头部保护物
赵新军 ? all right reserved 2015.03 四川 进化规律11:
系统元件的一般化处理
?
技术系统总是趋向于具备更强的通用性和多功能性,这样就能提供便利和满足多种需求。
元件的一般化
引进可互换元件
引入可自动交换的元件
引用动态性元件
引入可调节的元件或连结
赵新军 ? all right reserved 2015.03 四川
通用的球
?
这个球本身是无用的。但是如果我们有许多这样的球,我们能使用他们组装许多有用的物体。
?
一只带尾巴的塑料球被插在另一个球上并锁紧。锁的设计:每个球的尾部的小棒,棒的粗细是无规则的。这是由台湾人发明的。
?
你可以充分的想像。台湾人发明的魔术球有下列应用: 按摩,垫子,正方形和圆形。这些垫子也都具有按摩作用。
赵新军 ? all right reserved 2015.03 四川
6.4 技术成熟度预测方法
?
知道自己产品技术成熟度是一个企业制定正确决策的关键。
?
Ellen Domb 认为:“人们往往基于他们的情绪与状态来对其产品技术成熟度作出预测,假如人们处于兴奋状态,则常把他们的产品技术置于“成长期”,如果他们受到了挫折,则可能认为其产品技术处于退出期”。
赵新军 ? all right reserved 2015.03 四川
传统的技术预测方法
预测方法
规范化方法
探索性方法
分析
任务 目标
计划
显示 研究计划 主观
个体 小组 客观
定性
定量
赵新军 ? all right reserved 2015.03 四川
预测方法
?规范化方法:规范化方法的核心是“发现某个特征,确认使该特征能够实现的活动。”,既该方法倾向于提出促使
理想特征实现的策略与过程,该类方法中的核心方法是形态分析法(morphologic analysis )。
?探索性方法:探索性方法通过对过去与将来从低级到高级进化的过程预测未来,该类方法中的核心方法为S-曲线及
Delphi 法,前者为客观、定量法,后者为主观、小组法。
赵新军 ? all right reserved 2015.03 四川
预测方法
?上述的各种方法是西方世界提出的方法。MIT 的Frauens 2000年指出西方传统的技术预测存在如下3条缺点: 1.预测所需要的准则太弱;
2.支持提出及实现可能特征的工具集是有限的; 3.确定目前产品功能的潜力主要取决于专家。
? Frauens 还指出:前苏联TRIZ 中的技术系统进化(Technology System Evolution )理论已提供了强有力的技术预测工具,这些工具包括产品进化定律及进化路线等。
赵新军 ? all right reserved 2015.03 四川 分段的S —曲线
赵新军 ? all right reserved 2015.03 四川
技术成熟度预测曲线
赵新军 ? all right reserved 2015.03 四川
专利数量 利润
性能参数 发明级别
时间(阶段)
婴儿期 成长期 成熟期 退出期
赵新军 ? all right reserved 2015.03 四川
6.5 工程实例分析
?
实例1:滚筒型纺纱机械技术成熟
度预测分析
?
实例2:超声波焊接技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川 实例1:滚筒型纺纱机械
技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川
实例1:滚筒型纺纱机械
技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川 实例1:滚筒型纺纱机械技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川
实例1:滚筒型纺纱机械技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川 实例1:滚筒型纺纱机械技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川
96
滚筒式纺纱机技术预测
赵新军 ? all right reserved 2015.03 四川
增加动态性的进化路线
增加动态性
变成柔体性
变成场
增加自由度个数
变成微小物体
使物体零件的部分可活动
还不存在
状态5:是采用场。静电纺纱技术已进行过研究,但商品化前景并不乐观。早期的涡流纺纱机采用气体抽纱,沙线质量并不理想,新型的纺纱机采用空气射流技术,沙线质量提高。
赵新军 ? all right reserved 2015.03 四川
气流纺纱机
赵新军 ? all right reserved 2015.03 四川 实例2:
超声波焊接技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川
实例2:
超声波焊接技术成熟度预测分析
?
超声波焊接技术可以实现不同工件的(热塑性塑料或金属)焊接,和传统的焊接技术相比,超声波焊接更快,更安全。
?
高频电能被转换为高频振动能,对非铁磁性的金属物料工件进行焊接。
?
将弹性振动能量转变成工件间摩擦能、形变能和热能,致使两工件表面形成一层表面氧化膜,从而达到摩擦焊接。
?
实际上,这种高频振动能是一种往复循环的纵向运动,其循环次数为每秒1500次。
赵新军 ? all right reserved 2015.03 四川 1976至1998年间超声波焊接的发明专利数
赵新军 ? all right reserved 2015.03 四川
超声波焊接技术专利级别(1950—1998)
赵新军 ? all right reserved 2015.03 四川 超声波技术利润曲线,
1976-1998
赵新军 ? all right reserved 2015.03 四川
超声波技术成熟度预测分析
赵新军 ? all right reserved 2015.03 四川
第6部分 技术系统进化规律
?概述
?技术进化过程实例分析
?技术系统进化规律 ?技术成熟度预测方法 ?工程实例分析
系统预测方法
研究生专业课程考试答题册 学号 2015022056 姓名张华威 考试课程系统工程理论与方法 考试日期 2016.01.06 西安工程大学研究生部
西安工程大学 硕士研究生课程考试试题 考试科目:系统工程理论与方法课程编号:022014 年级:2015级学院:机电工程学院 说明:所有答案必须写在答题册上,否则无效。共 1 页第 1 页 本课程考核采用提交报告形式,具体要求如下: 1.形式 (1)专题研究型 按照研究型论文的规范,表明研究问题与研究现状、提出新的分析方法,或对已有方法作出某种修正,或利用已有理论与方法对所研究问题进行分析并得出有价值的结论等。 (2)文献综述型 围绕一研究领域或学派对其研究现状与发展趋势、有待进一步深入研究的问题等进行详细阐述。 2.注意事项 [1]鼓励提交专题研究型论文; [2]按学术论文规范编排:包括中文摘要、关键词(3至5个),并将主要参考文献 在正文引用处标注等; [3]切忌写成工作总结或心得体会; [4]字数在6000字以上; [5]利用研究生考试册的封面装订并裁剪整齐。
系统预测方法及应用 摘要 预测是建立在已有或已知基础上对未来的探索,运用系统性的科学技术和手段对系统未来趋势进行分析,就是系统预测。作为决策的前提,系统预测在生产管理中发挥着重要作用,从简单的时序分析预测,到复杂的回归建模预测,不同的预测方法满足了不同种类的预测需求。本文从系统预测概念出发,结合不同的预测方法,阐述了系统预测在不同领域的应用。 关键词:系统预测时间序列分析预测法质量预测 Abstract Prediction is based in existing or known on the basis for the future exploration and analysis of the future trends of the system by using the system of science and technology and means, is the system prediction. As the premise of decision-making and forecasting system in production management plays an important role, from the simple timing analysis and forecasting, to complex regression modeling and forecasting, different forecasting methods to meet the different kinds of demand forecasting. This paper from the system prediction concept, combining the different forecasting methods, expounds the system prediction in different fields. Key words:System prediction Time series analysis prediction method qualitative forecast
预测控制的现状
预测控制的现状和发展前景 预测控制一经问世,即在复杂工业过程中得到成功应用,显示出强大的生命力,它的应用领域也已扩展到诸如化工、石油、电力、冶金、机械、国防、轻工等各工业部门。它的成功主要是由于它突破了传统控制思想的约束.采用了预测模型、滚动优化、反馈校正和多步预测等新的控制策赂,获取了更多的系统运行信息,因而使控制效果和鲁棒性得以提高。 预测控制的理论研究工作也取得了进展。比如采用内模结构的分析方法,为研究预测控制的运行机理、动静态待性、稳定性和鲁棒性提供了方便。运用内模结构的分析方法还可找出各类预测控制算法的共性,建立起它们的统一格式,便于对预测控制的进一步理解和研究。此外,将预测控制与自校正技术结合起来,可以提高预测模型的精度;减少预测模型输出误差,提高控制效果。但现有的理论研究仍远远落后于工业应用实践。从目前发表的文献来看,理论分析研究大多集中在单变量、线性化模型等基本算法上:而成功的工业应用实践又大多是复杂的多变量亲统;这表明预测控制的理论研究落后于工业生产实际;因此,如何突破现状,解决预测控制中存在的问题,对促进这类富有生命力的新型计算机控制算法的进一步发展有重要意义。下面就目前预测控制中存在的主要问题和发展前景作些探讨。 (1) 进一步开展对预测控制的理论研究,探讨算法中主要设计参数对稳定性、鲁棒性及其他控制性能的影响,给出参数选择的定量结果。 上述问题的主要困难是,由于采用以大范围输出预测为基础的在线滚动优化控制策略,使得预测控制闭环输入、输出方程非常复杂,其主要设计参数都足以蕴含的方式出现在闭环传递函数中,因而难以用解析表示式表示出各参数变化对闭环系统动、静态特性、稳定性和鲁棒性的影响,给出设计参数变化的选择准则。要突破这一点,还要做大量工作,需要探讨新的分析方法。 (2)研究当存在建模误差及干扰时,顶测控制的鲁棒性,并给出定量分析结果。 在设计控制系统时,对于建模误差及干扰等的影响,并未考虑在内。实际上,为了简化问题,常对模型作降阶处理及其他简化,对一些次要的动特性和外部扰动也予以忽略。在这种情况下,系统在运行过程中能否保证稳定,具有所期望的控制性能,并能保证到什么程度,这就是的“近年来所谓的“控制系统的鲁棒性”问题。所谓鲁棒性是指系统的稳定性及其性能指标对结构和参数变化的不敏感性,也就是当内部和外部条件变化时,系统本身仍然能保持性能良好的运行的鲁棒程度。鲁棒性分为稳定鲁棒性和性能鲁棒性两种,稳定鲁棒件说明实际系统偏离设计所用数学模型,出现模型误差时,系统保持闭环稳定性的能力。性能鲁棒性是表示实际系统偏离设计所用数学模型时,系统保持满意性能的能力。虽然性能鲁棒性隐含着稳定的要求,但其着眼点不是集中在稳定性上,至今控制系统统的鲁棒性主要是研究稳定鲁棒性,因为稳定性是—个控制系统首先要保证的条件。 分析预测控制系统的稳定鲁棒性有一定难度。当过程模型采用非最小化的非非参数模型时,如MAC、DMC等,研究闭环系统的稳定鲁棒性涉及到高阶多项式稳定性的判别问题.且可调设计参数又隐含在闭环传递函数中,难于找出它们与稳定鲁棒性的定量关系,增加了分析的难度,当过程模型采用最小化的参数模型时,如GPR,GPP等,虽模型的参数个数少了,可大大降低闭环特征多项式的阶次,有可能定量地分所闭环系统的稳定鲁棒性。但因为采用了最小化的经简化后的低阶模型,没有包含在模型内的未建模动态和于扰等,在某些特定条件下有可能被激发,导致系统无法稳定运行,这其中所遇到的问题与研究自适应控制系统鲁棒性的问题相类似,解决这一问题,尚需进—步做工作。 当前,研究预测控制系统的稳定鲁棒性,除了继续从理论上进行探讨、研究新的分析方
01_TRIZ的技术系统八大进化法则
(一)TRIZ的技术系统八大进化法则 阿奇舒勒的技术系统进化论可以与自然科学中的达尔文生物进化论和斯宾塞的社会达尔文主义齐肩,被称为“三大进化论”。TRIZ的技术系统八大进化法则分别是:1、技术系统的S曲线进化法则;2、提高理想度法则;3、子系统的不均衡进化法则;4、动态性和可控性进化法则;5、增加集成度再进行简化法则;6、子系统协调性进化法则;7、向微观级和场的应用进化法则;8、减少人工进入的进化法则。技术系统的这八大进化法则可以应用于产生市场需求、定性技术预测、产生新技术、专利布局和选择企业战略制定的时机等。它可以用来解决难题,预测技术系统,产生并加强创造性问题的解决工具。 八大技术系统进化法则 1.技术系统的S曲线进化法则 1)婴儿期2)成长期3)成熟期4)衰退期
各阶段的特点。 S曲线族 2.提高理想度法则 1)一个系统在实现功能的同时,必然有2个方面的作用:有用功能和有害功能; 2)理想度是指有用作用和有害作用的比值 3)系统改进的一般方向是最大化理想度比值 4)在建立和选择发明解法的同时,需要努力提升理想度水平 提高理想度可以从以下4个方向予以考虑: 1)增加系统的功能2)传输尽可能多的功能到工作元件上3)将一些系统功能转移到超系统和外部环境中4)利用内部或外部已经存在的可利用资源。 3.子系统的不均衡进化法则
1)每个子系统都是沿着自己的S曲线进化的 2)不同的子系统将依据自己的时间进度进化 3)不同的子系统在不同的时间点到达自己的极限,这将导致子系统间矛盾的出现 4)系统中最先到达其极限的子系统将抑制整个系统的进化,系统的进化水平取决于此系统 5)需要考虑系统的持续改进来消除矛盾 4.动态性和可控性进化法则 1)增加系统的动态性,以更大的柔性和可移动性来获得功能的实现 2)增加系统的动态性要求增加可控性 5.增加集成度再进行简化法则 1.增加集成度的路径 2简化路径 3单--双---多--路径 4子系统分离路径 6.子系统协调性进化法则 1.匹配和不匹配元件的路径 2调节的匹配和不匹配的路径 3工具和工件匹配的路径 4匹配制造工程中加工动作节拍的路径 7.向微观级和场的应用进化法则 1.向微观级转化的路径 2转化到高效场的路径 3增加场效率的路径 4分割的路径 8.减少人工介入的进化法则 (1)减少人工介入的一般路径 本路径的技术进化阶段:包括人工动作的系统→替代人工但仍保留人工动作的方法→用机器动作完全代替人工。
TRIZ理论八大技术系统进化法则
机械创新设计课程论文(TIZE理论的八大技术系统进化法则) 专业机械设计制造及其自动化 班级10机自职1 学号1010113126 姓名姚巧珍 成绩 教师刘小鹏 2013年5月23日
TRIZ理论的八大技术系统进化法则 姚巧珍 (10机自职1班,学号:1010113126) [摘要] 技术系统的这八大进化法则可以应用于产生市场需求、定性技术预测、产生新技术、专利布局和选择企业战略制定的时机等。它可以用来解决难题,预测技术系统,产生并加强创造性问题的解决工具。本文讲述了TRIZ理论的八大技术系统进化法则,这些技术系统进化法则基本涵盖了各种产品核心技术的进化规律,每条法则又包含多种具体的进化路线和模式。它可以帮助设计者在方案设计阶段迅速地产生个具有创造性的新概念,实现产品的快速创新。 [关键词] 技术系统,进化法则,子系统,S曲线。 引言 一个产品或物体都可以看做是一个技术系统,技术系统可以简称为系统。系统是由多个子系统组成的,并通过子系统间的相互作用来实现一定的功能,子系统可以是零件或部件甚至于构成元素。系统是处于超系统之中的,超系统是系统所在的环境,环境中的其他相关的系统可以看做是超系统的构成部分。技术系统的进化是指实现系统功能的技术从低级向高级变化的过程,进化是客观进行着的,不管人们是认识了它还是没有认识它。如果认识和掌握了系统的进化规律,有利于设计者开发出更先进的产品,从而提升产品的竞争力。 1.八大技术系统进化法则 TRIZ的技术系统八大进化法则分别是:1)技术系统的S曲线进化法则; 2)提高理想度法则; 3)子系统的不均衡进化法则; 4)动态性和可控性进化法则;5)增加集成度再进行简化法则; 6)子系统协调性进化法则; 7)向微观级和场的应用进化法则; 8)减少人工进入的进化法则 1.1技术系统的S曲线进化法则 图1-1是一条典型的S曲线。S曲线描述了一个技术系统的完整生命周期,图中的横轴代表时间;纵轴代表技术系统的某个重要的性能参数,比如飞机这个技术系统,飞行速度、可靠性就是其重要性能参数,性能参数随时间的延续呈现S形曲线。 一个技术系统的进化一般经历4个阶段,分别是: 1)婴儿期 2)成长期 3)成熟期 4)衰退
专利分析的技术预测方法和工具
专利分析的技术预测方法和工具 熊腾飞 摘要:专利作为一种技术的载体,包含有世界95%的新技术。以往的专利分析仅仅是对一些数据进行统计,如发明人、权利人和申请时间等。对技术分析一般仅限对分类号进行分类统计。但技术分析具有丰富的内容,本文就基于专利分析的技术预测方法和工具进行介绍。 一、引言 曾经和一位知识产权经理谈专利分析。她告诉我一个思想,他们很少去分析现有专利来布置专利的研发战略。原因是什么呢?大家可以自己考虑一下。她给出的原因是,现有公开的专利都是1到3年前研发出来的技术。那么,这些新颁布的专利其实是人家几年前的“旧技术”。那么你研究人家的旧技术,来规划你的研发战略,对于他们这些高新技术而言,就没有意义了。 以上说法实际上很有道理。其实,我们也不能跟着别人的路子走,别人有什么技术,我们就仿造某技术。要想占领市场,就要做领头羊。呵呵。这些话大家比我会讲,讲得比我好。我就不讲了。 我们不做跟随者,那么是不是就不需要研究别人的专利呢?特别是高新产业?我想,NO。不过,我要说,我们研究不是看别人正在出什么专利,而是研究根据历史的专利中蕴藏的技术,如何预测到未来的技术。如果你根据现有专利能预测到未来5到10年的专利技术,是否就值得你研究了呢? 如果你认为企业没有长久的技术发展需求,那就不需要往下看了。 二、技术预测的方法 我还是不得不说TRIZ,即发明问题解决理论。一方面本人是做这方面的。二来,TRIZ与专利有紧密的联系。TRIZ有关的介绍大家可以在百度上搜索到很多文章,
我就不做整体介绍。TRIZ中一个核心的思想就是,技术的发展是有规律的。比如说一个物体,现在是刚性的,未来就可能是分离的、柔性的、液态的、气态的、甚至是场的(在TRIZ中,这个称动态性进化法则)。这种路径是经过大量的技术进行总结出来的,具有经验型的规律(我一位同事从数学上推导了以上进化规律,但尚未公开发表。)既然有规律,那么我们就可以沿着规律预测到下一代、下两代的产品。如现在技术是采用柔性的,未来就可能采用场的。 曾经在中央2台看到格之格公司的一个墨盒报道。记得是他们生产兼容墨盒。但是现有墨盒相关的专利太多了,一些大公司申请了很多保护性专利。如何用低成本生产兼容墨盒呢?开始他们按照传统的思路没有任何进展。之后,他们意外发现,现有的墨盒都是通过液体控制墨水的流速的,他们突发奇想,能否通过气体控制流速?结果他们成功了。 看到报到,我有些感慨。因为上述技术正符合了我前述的技术发展路径。他们在无意识中遵循了技术发展的规律去发展了新的产品。我想,如果,当初他们知道了TRIZ该多好啊。 前不久,我和一位技术老总谈他们的新技术。发现他们的技术采用了直线型结构。我告诉他,是否有曲线形结构的技术?经过专利搜索,发现真的有了。我又告诉他,是否有螺旋结构的,经过搜索,也有了。再问是否有点结构的技术?他又搜索,发现又有了。上述结果并不是因为我了解他们行业,而是遵循TRIZ中的直线-曲线-螺旋线-点的路径。此时,我看了看那些技术特征,我告诉他你的技术肯定在更新到下一代。不再按照现有原理进行结构改进了,而是采用新的原理发展。他看了看我,笑了。因为确实,他现在正在和一家研究机构开发下一代技术,此技术正在开发中,尚未正式问世! 上面的例子只想说一点,包括TRIZ在内的一些方法可以帮助我们进行下一代技术的预测。 所以,我们做专利的技术分析,不仅仅是看现在有什么了,而且要看到规律。最近不是在谈科学发展观吗,其实技术也是这样,要用发展的眼光看问题。我们企业做专利分析工作的,你们其实不仅仅可以向科研人员提供现在有什么专利技
技术系统进化法则培训讲义
TRIZ培训讲义
技术系统进化法则
技术系统进化法则
DAOV路线图—优化阶段
定义 Define 分析 Analyze 优化 Optimize 验证 Verify
1.概念列表
2.方案选择
S曲线 进化法则 进化树 列出概念方案 风险分析
决策分析 Pro/Innovator 评价模块
A Pera Global Company ? 2011 IWINT,INC
进化法则的作用和意义
对于新产品的预测分析给予建议 对于现有产品的改进方向给予建议 作为产品专利规避的有效工具
A Pera Global Company ? 2011 IWINT,INC
第 1 页
IWINT
TRIZ培训讲义
技术系统进化法则
主题大纲
进化规律简介 技术系统进化法则 Pro/E软件简介 产品预测的步骤和案例 小结
A Pera Global Company ? 2011 IWINT,INC
TRIZ的核心思想之一
技术系统的进化和发展并不是随机的,而是遵循 着一定的客观规律
A Pera Global Company ? 2011 IWINT,INC
TRIZ体系——创新的规律
算法
S曲线
完备性法则 能量传递法则 协调性法则 动态性法则 子系统不均衡进化 向超系统进化
创新的思维 创新的方法
工具 工具
创新的规律
向微观级进化 提高理想度法则
……
正确预测 产品未来!
术语
A Pera Global Company ? 2011 IWINT,INC
第 2 页
IWINT
MIMO系统的多模型预测控制_英文_
第29卷 第4期 2003年7月自 动 化 学 报ACTA AU TOMA TICA SIN ICA Vol 129,No 14J uly ,2003 Multiple Model Predictive Control for MIMO Systems 1) L I Ning L I Shao 2Yuan 1 XI Yu 2G eng (Instit ute of A utomation ,S hanghai Jiaotong U niversity ,S hanghai 200030) 1(E 2mail :syli @https://www.360docs.net/doc/627917816.html, ) Abstract A multi 2model 2based predictive control (MMPC )strategy dealing with nonlinear model 2based predictive control (NMPC )for MIMO systems is developed in this paper.Firstly a multi 2model i 2dentification method is https://www.360docs.net/doc/627917816.html,ing fuzzy satisfactory clustering algorithm presented in this paper ,the complex nonlinear system can be quickly divided into multiple fuzzy parts.A global model can be ob 2tained by some transformation of the obtained multiple linear models.An MMPC algorithm is therefore designed for the global MIMO systems with system performance analysis.Taking a p H neutralization control system as simulation example ,the simulation results verify the effectiveness of MMPC on com 2plex nonlinear systems. K ey w ords MIMO systems ,multi 2model ,model 2based predictive control (MPC ),fuzzy satisfactory clustering ,p H neutralization process 1)Supported by National Natural Science Foundation of P.R.China (69934020and 60074004) Received May 8,2002;in revised form August 28,2002 收稿日期 2002205208;收修改稿日期 2002208228 1 Introduction Recently Model Predictive Control (MPC )has become an attractive research field in auto 2matic control for its advantages over conventional techniques and successful applications in in 2dustry.MPC algorithms were originally developed for linear processes ,but the basic idea can be transferred to nonlinear systems [1,2].Unfortunately ,two major issues limit its possible applica 2tion to nonlinear systems.The first is their assumption of a model that has to be quite accurate ;however ,the modeling of industrial systems often presents problems of nonlinearity ,strong coupling ,uncertainty ,and even wide operating range ,a satisfied model is always difficult to obtain.The second is that a nonlinear non 2convex optimization problem must be solved for each sampling period with algorithms which are usually too slow for real 2time control due to a large amount of computation.The facts have forced the control community to study simplifications of this general approach in order to remove these https://www.360docs.net/doc/627917816.html,ually ,the nonlinear model is lin 2earized iteratively in each control interval to solve the above problems.This paper will present a new solution based on multi 2model approach. Multi 2model approaches are very proper to control industrial processes ,especially chemical processes for their inherently nonlinearity and large set point changes or load disturbances.Based on divide 2and 2conquer strategy ,multi 2model approaches develop local linear models or controllers corresponding to typical operating regimes ,then fit the global system through cer 2tain integration of local models or controllers.Actually ,applying multi 2model control to nonlin 2ear or time 2varying systems has a long history.However ,multi 2model approach for M IMO sys 2tems seldom appears in literatures. In this paper ,a Multi 2Model Predictive Control (MMPC )is presented to deal with NMPC problem of M IMO systems.Firstly ,a multi 2model modeling method using T 2S structure model is https://www.360docs.net/doc/627917816.html,ing fuzzy satisfactory clustering algorithm given in this paper ,a complex non 2linear system can be quickly divided into local systems ,and the global system can be described by integration of the local linear models.Secondly ,merging the obtained multiple linear models with M IMO G eneralized Predictive Control (GPC ),a novel MMPC algorithm is designed for the global system.As a major benefit of the multi 2model strategy ,linear predictive controllers
预测控制1
分数: ___________华北电力大学研究生作业 学年学期: 课程名称:预测控制 学生姓名: 学号: 提交时间:
目录 引言 (1) 1.预测控制 (2) 1.1.单步预测控制 (2) 1.2.多步预测控制 (4) 1.2.1.对差分方程的思考 (5) 1.2.2.差分方程与传递函数关系 (6) 2.内膜控制(IMC) (7) 2.1.基本原理 (7) 2.1.1.模型获取 (7) 2.1.2.控制器计算 (7) 2.1.3.性质 (8) 2.2.基于IMC的PID设计 (9) 2.2.1.IMC变形 (9) 2.2.2.IMC控制器与PID控制器的联系 (9) 2.3.效果 (10) 3.动态模型控制(DMC) (10) 附录A (13) 附录B (16) 附录C (20) 附录D (22)
引言 本学期开了新的一门控制学科——预测控制,预测控制是一种基于模型的先进控制技术,它源于工业实践,最大限度地结合了工业实际地要求,并且在实际中取得了许多成功的应用,是一类新型的计算机控制算法。因为工业生产的过程相当复杂,通过“黑白箱”建立起的模型并不完善,即使使用理论非常复杂的现代控制理论,其控制效果往往也不尽如人意,甚至在某些方面还不及传统的PID 控制。随后通过老师课堂上对预测控制学科的介绍和讲解,我们渐渐认识到了这门新的学科,它不同与之前学过的PID控制器的思想,也和前馈系统控制思想有很大的不同,预测控制采用多步预测、滚动优化和反馈校正等控制策略实现控制被控对象,适用于控制不易建立精确数字模型并且比较复杂的工业生产过程。并且由于当今计算机技术的快速发展,Matlab、C、C++的出现极大的方便了我们的理论分析和数学运算。 本课程一方面通过老师课堂上的讲解,另一方面通过课下练习老师布置的习题,一步一步的深入了解了预测控制的原理和运行机制。
基于非线性混沌时序的系统重构、预测技术及其应用(DOC 9页)
基于非线性混沌时序的系统重构、预测技术及其应用(DOC 9页)
基于非线性混沌时序的系统重构、预测技术及其应用1 马军海2 (天津大学管理学院, 300072) 盛昭瀚 (南京大学管理科学与工程研究院, 210096) 摘要如何认识具有复杂结构的系统存在两个基本的困难, 一是系统本身的复杂性,二是我们往往只能通过某种“观 测器”采集到系统某一状态的混沌时间序列,这样,就需 要一种技术,它可以在很大程度上通过系统整体行为的一 维“投影”来“还原”系统的整体行为。本文将介绍作者 近年来在实现这一技术路线中所开展的若干工作。 关键词非线性混沌时序分形相空间重构参数辨识 预测技术 1 引言 从系统科学的角度看,直接建立一个系统的完备的解析形式的数学模型,无疑地可以认为是“完全彻底地”了解了这一系统,但是事实上,第一由于系统运行机理与系统结构本身的复杂性,第二由于即使已知一个解析模型,其解析解也还不易求得,因此常常需要我们解决如何 1国家自然科学基金资助项目( 79990510) 2马军海, 男,65生,山东莱阳人,教授,二站博士(后),已在国内外核心期刊发表论文三十余篇,主要研究方向:复杂非线性动力系统、复杂混沌时序重构及其工程应用。
在无法获得系统模型的情况下认识系统的本质特征,一个最常遇到的问题便是通过某种“观测器”采集到系统的某一状态的时间序
由(6)式得2d 的方差为: ()M d d d X f E d Var 2222222,ln )?(=????? ???-= (3) 由于实际问题中N 的取值不可能无穷大而要受到诸多的限制,取j i ij x x r -= 则2d 的极大似然估计为: 1021?->????? ???? ??=∑M j i ij ij r r w M d ,)(0ij ij r r H w -=,∑>=N j i ij w L (4) 由(3)式知值 )?(2 d Var 与所取的样本的个数成反比,实际问题中适当的取样本大一些可减少)?(2d Var ,以便使2 d 的估计值更准确。采用G-P 算法计算动力系统实测数据吸引子的关联维数时,诸多因素可能影响估计精度。对误差的来源的详细讨论见文献[4,13]。 4 混沌时序动力系统的非线性重构技术 定量刻画复杂非线性动力系统复杂性的两个最常用的量就是分维数和李雅普诺夫指数,它们分别度量了非线性动力系统在其相空间的几何结构的规则性或复杂性程度。相空间重构法是根据有限的实测数据来重构吸引子以研究系统动力行为的方法,其基本思想是:系统中任一分量的演化都是由与之相互作用着的其它分量所决定的,因此这些相关分量的信息就隐藏在任一分量的发展过程中,为了重构一个等价的状态空间只需考察一个分量,并将它在某些固定的时间延迟点上的测量作为新维处理,即延迟值被看成是新的坐标,它们确定了某个多维状态空间中的一点。重复这一过程并测量相对于不同时间的各延迟量,就可以产生出许多这样的点,它可以将吸引子的许多性质保存下来,即用系统的一个观察量可以重构出原动力系统模型,可以初步确定系统的真实相空间的维数。 为了能够从“一维”时间序列中“还原”动力系统相空间的几何结构, Jone F.Gibson [16] 等人采用时间延迟技术重构相空间.他们把一维时间序列嵌入到m 维空间中: T m t x t x t x t x t X ]))1((,...,)2(,)(,)([)(τττ----= (5) 让X t ()来表示t 时刻系统的动力学状态。其中τ为滞时,m 为嵌入空间维数,从而建立了相空间R M 到嵌入空间R m 的映射。它建立了时间序列波动和动力系统空间特征之间的桥梁。 Takens 和Mane [27]证明: 只要m>2D+1(动力系统重构的充分但不必要条件),其中D 为吸引子的分维, ()m 是在吸引子附近一个光滑的一对一映射,从而嵌入空间中吸引子的几何特性与原动力学系统的吸引子的几何特性等价。 实际上, 只要m> D 嵌入空间中点集的维数
预测技术和方法
Journalism & Communication School 新闻传播学院 预测技术和模型 Forecasting Analysis and Models 主讲教师:沈浩 北京广播学院新闻传播学院副教授北京广播学院研究统计研究所 副所长 IPSOS (中国)市场研究有限公司 首席技术顾问 新闻传播学院 2 “凡事预则立,不预则废” “未雨绸缪”“运筹帷幄” 新闻传播学院3人们总是通过尽可能准确的估计将来会发生什么事情来试图减少这种不确定性,预测的本质 正在于此。 新闻传播学院 4 预测的分类 ?定性预测(经验预测技术) 个人见解法、集思广义法、市场调查法、德尔菲法(Delphi Method )、头脑风暴法(Brain Storming ) ?定量预测 因果关系预测、时间序列预测和结构关系预测 新闻传播学院 5个人见解法 这是最为广泛运用的一种预测方法——也是管理人员应该力争避免的一种预测方法。它完全依赖于个人判断——包括他的观念、成见和盲点。预测的效果也许会很好,也许会很差。这一方法的主要不足是其不可靠性。 新闻传播学院 6 预测方法的各种比较研究清楚地显示:熟悉情况的人根据经验及主观见解作出的预测,总是比对现状一无所知的人运用正规方法所作的预测差。
新闻传播学院7集思广义法 集思广义法是通过召开讨论会的形 式,请熟知所要预测问题的专家发表意见,进行讨论,然后再集中专家的意见,得出大家满意的预测结果。 新闻传播学院 8 这种方法的优点是有利于专家交换 意见,相互启发,弥补个人不足,也便于全面考虑事件发生和发展的各种可能性。缺点是参加会议的人数有限,不利于广泛收集各种意见。另外,讨论时专家心里因素影响较大,易屈服于某些权威人士和大多数人意见,而忽视少数人意见。 新闻传播学院9市场调查 很多时候即使是一组专家也没有足够的知识与信息可以据以得出合理的预测。例如:推出一种新产品时就有可能出现这种情况。这时就要靠市场调查收集潜在顾客的样本资料,分析他们的观点,并据以推断潜在客户总体的情况。 新闻传播学院 10 市场调查可以得到有用的信息,但往往要消耗很多资金与时间。同时,因为市场调查的结论依赖于下述条件:调查的是能代表总体的一组样本顾客;调查问题是有意义、无偏(中性)的;调查对象公平和诚实的回答;对于回答的可靠性分析。所以,市场调查也很容易出现偏差。 新闻传播学院 11 德尔菲法Delphi Method 又称专家调查法,它起源于本世纪的40年代末期,最初由美国兰德公司(The Rand Corporation )首先使用,很快就在世界上盛行起来。 德尔菲是古希腊的一座城市,因阿波罗神殿而出名。相传阿波罗太阳神有很高的预测未来的能力;因此,德尔菲法便成为预测未来的神谕之地,故将此法命名为德尔菲法。 新闻传播学院 12 主观概率法 为了进一步消除德尔菲法中“随大流”的倾向,可以不要求专家对某一事件的发生作出肯定或否定的回答,而只要求作出概率性的估计。每位专家对某一事件发生的程度作出的概率估计称为主观概率,也叫个人概率。
triz八大技术进化法则
1、提高理想度进化(理想度=系统所有有用的功能/(系统所有有害的功能+成本))法则 目标是提高技术系统的理想度,但我们可以从技术系统本身,技术系统子系统,技术系统的超系统和物质四个方面来进行提高。 首先,我们来看看技术系统本身,我们可以把一个系统根据作用分为4个部分,外加一个能量源。执行类系统的4个部分(子系统):动力装置,传输装置,执行装置和控制装置;测量技术系统的4个部分为:传感装置,传输装置,转换装置,控制装置。技术系统的这4个部分是缺一不可的,因此这就引出了技术系统的第2个进化法则: 2 完备性进化法则 这个其实很好理解,既然技术系统的4个部分必须存在,我们就可以利用这个原则对技术系统进行分析,看这个系统是否可行。一种方法就是检查系统的各个部分能量是否可达,传递效率如何,而这种方法就引出了技术系统进化的第3个原则: 3、能量传递进化法则 通过这个法则,我们可以判断技术系统的各个元件是否必要(如果能量不能传递到某个元件,要么这个元件没有用可以除掉,要么就是这个元件不能工作,没有达到预期的功能),也可以通过分析能量的传递效率来达到完善技术系统的目的。 我们将一个技术系统分解成多个子系统,目的可以分析这些子系统,看看这些子系统本身的进化,子系统之间的进化一般来讲都是不均衡的,通过对这种不均衡进行分析,我们可以改进进化落后的子系统,从而达到整个系统的改进目的,这就是技术系统的第4个进化原则:4:子系统不均衡进化法则 其实这种分析,类似于水桶原理,一个系统的短板往往是进化最落后的子系统,通过找出短板子系统,就可以实现技术系统的改进目的。 1法则是目标,2-4都是根据系统的分解来进行分析,如果我们将一个系统放到一个更高级的系统中(超系统)去思考,可以得到很多意外的惊喜,这是技术系统进化的第5个原则:5、向超系统进化原则 这有两层含义,一种是当前技术系统要有效的整合超系统的资源,比如车载收音机,其电源可以使用自带电池,但更好的办法是利用车里的能源系统,另外一种是融合到超系统中,这种方式我叫它组合法则,就是将当前技术系统组合到超系统中,这种例子非常多,比如收音机的一个超系统:人在驾车中听收音机,收音机融合到超系统中,就成了车载收音机。这种进化法则不仅适用于制造加工,也同样适用于软件,通过不断的功能融合以达到创新的目的,Google的眼镜,苹果的手表都是这种进化的典型。 对于物理存在的技术系统,存在着柔性化,可移动性和可控性的要求,这三个进化法则合在一起就是技术系统的第6个进化法则: 6、技术系统的动态化进化原则 提高柔性化是指系统会朝着更灵活,更方便的方向进化,比如网络从铜轴到双绞线到到无线。柔性化揭示的其实是系统元件物质和结构的进化法则;提高可移动性进化法则则预示着技术
TRIZ理论技术系统进化法则
3.5 基于技术系统进化法则的方案设计 技术系统进化论的主要观点是技术系统的进化并非随机的,而是遵循着一定的客观的进化模式,所有的系统都是向“最终理想化”进化的,系统进化的模式可以在过去的专利发明中发现,并可以应用于新系统的开发。 3.5.1汽车车架的进化路线描述 TRIZ中子系统协调性进化法则指出:在技术系统的进化中,子系统的匹配和不匹配交替出现,以改善性能或补偿不理想的作用。也就是说技术系统的进化是沿着各个子系统相互之间更协调的方向发展。即系统的各个部件在保持协调的前提下,充分发挥各自的功能。如图3.19所示。对车架增加保险杠,提高汽车的防撞性能,提高安全性。 图3.19 车架进化路线 这次进化的地方是将原来的最容易发生碰撞的前端增加了保险杠,从而使得汽车的防撞性能得到改善。 3.5.2汽车控制系统的进化路线描述 TRIZ指出技术系统的动态性进化应沿着增加结构柔性、可移动性、可控性的方向发展,以适应环境状况或执行方式的变化。 本文选择动态性的增加可控性进化路线:无控制→直接控制→反馈控制→自我调节,即引入某种部件,即增加防抱死系统,具体方案如图3.20所示。
图3.20 控制系统进化路线 防抱死制动系统ABS全称是Anti-lock Braking System,即ABS,可安装在任何带液压刹车的汽车上。它是利用阀体内的一个橡胶气囊,在踩下刹车时,给予刹车油压力,充斥到ABS的阀体中,此时气囊利用中间的空气隔层将压力返回,使车轮避过锁死点。 ABS(Anti-lock Braking System)防抱死制动系统,通过安装在车轮上的传感器发出车轮将被抱死的信号,控制器指令调节器降低该车轮制动缸的油压,减小制动力矩,经一定时间后,再恢复原有的油压,不断的这样循环(每秒可达5~10次),始终使车轮处于转动状态而又有最大的制动力矩。、 在制动时,ABS根据每个车轮速度传感器传来的速度信号,可迅速判断处车轮的抱死状态,关闭开始抱死车轮上面的常开输入电磁阀,让制动力不变,如果车轮继续抱死,则打开常闭输出电磁阀,这个车轮上的制动压力由于出现直通制动液贮油箱的管路而迅速下移,防止了因制动力过大而将车轮完全抱死。在此同时,主控制阀通电开启,动态压力的制动液可进入制动阀,动态压力的制动液从动态助力管路通过主控制阀、制动总泵密封垫外缘到达前轮输入管路如此反复地工作(工作频率3-12次/秒),让制动状态始终处于最佳点(滑移率S为20%),制动效果达到最好,行车最安全。 在制动总泵前面腔内地制动液是动态压力制动液,它推动反应套筒向右移动,反应套筒又推动助力活塞从而使制动踏板推杆向右移。因此,在ABS工作地时候,驾驶员可以感觉到脚上踏板地颤动,听到一些噪音。 汽车减速后,一旦ABS电脑检测到车轮抱死状态消失,它就会让主控制阀关闭,从而使系统转入普通地制动状态下进行工作。如果蓄压器地压力下降到安全极限以下,红色制动故障指示灯和琥珀色ABS故障指示灯亮。在这种情况下,驾驶员要用较大地力进行深踩踏板地制动地方式才能对前后轮进行有效地制动。
预测方法与技术_课后的答案
作业:P70 6、解:(1)甲:销售期望值=1120*0.25+965*0.5+640*0.25=922.5(万元) 乙:销售期望值=1080*0.20+972*0.50+660*0.30=900(万元) 丙:销售期望值=1200*0.25+980*0.60+600*0.15=978(万元) (2)922.5*0.3+900*0.35+978*0.35=934.05(万元) (3)(934.05+1000*1.2+900*1.4)/(1+1.2+1.4)=942.79(万元) 7、 解:(1 (2)预测误差为1%,则预测区间为8.2%±1%,为[7.2%,9.2%],区间概率为1-1%=99% 作业(P116) 1.江苏省2004年1—11月社会消费品零售总额如下表所示,试分别以3个月和5个月移动平均法, 2.1995—2002年全国财政收入如下表所示,试用加权移动平均法预测2003年财政收入(三年加权系数为0.5、1、1.5)。
3、我国1995—2002年全社会固定资产投资额如下表所示, 试用一次指数平滑法预测2003年全社会固定资产投资额(取α=0.3 4.我国1995—2002年全国城乡居民年底定期存款余额如下表所示: (1)试用趋势移动平均法(取N=3)建立全国城乡居民年底定期存款余额预测模型。 (2)分别取α=0.3,α=0.6,以及(1) (2)00123()328292.8S S Y Y Y ==++=建立全国城乡居民年底定期存款 余额的直线指数平滑预测模型。 (3)计算模型拟合误差。 (4)比较3个模型的优劣。 (5)用最优的模型预测2003年全国城乡居民年底定期存款余额。 解: 年份 定额存款 一次移动平均(N=3) 二次移动平均(N=3) 一次指数平滑(α=0.3) 二次指数平滑(α=0.3) 一次指数平滑(α=0.6) 二次指数平滑 (α=0.6) 1995 23778.2 28292.8 28292.8 28292.8 28292.8 1996 30873.4 26938.42 28292.8 25584.04 28292.8 1997 36226.7 30292.76667 28118.914 27886.486 28757.656 26667.544 1998 41791.6 36297.23333 30551.2498 27956.2144 33239.0824 27921.6112 1999 44955.1 40991.13333 35860.37778 33923.35486 28734.72502 38370.59296 31112.09392 2000 46141.7 44296.13333 40528.16667 37232.8784 30291.31397 42321.29718 35467.19334 2001 51434.9 47510.56667 44265.94444 39905.52488 32373.7833 44613.53887 39579.65565 2002 58788.9 52121.83333 47976.17778 43364.33742 34633.30578 48706.35555 42599.98558