智能计算里三者的关系
目前,在计算智能与人工智能的关系方面有两种不同的观点,一种观点认为计算智能是人工智能的一个子集,另一种观点认为计算智能和人工智能是不同的范畴。
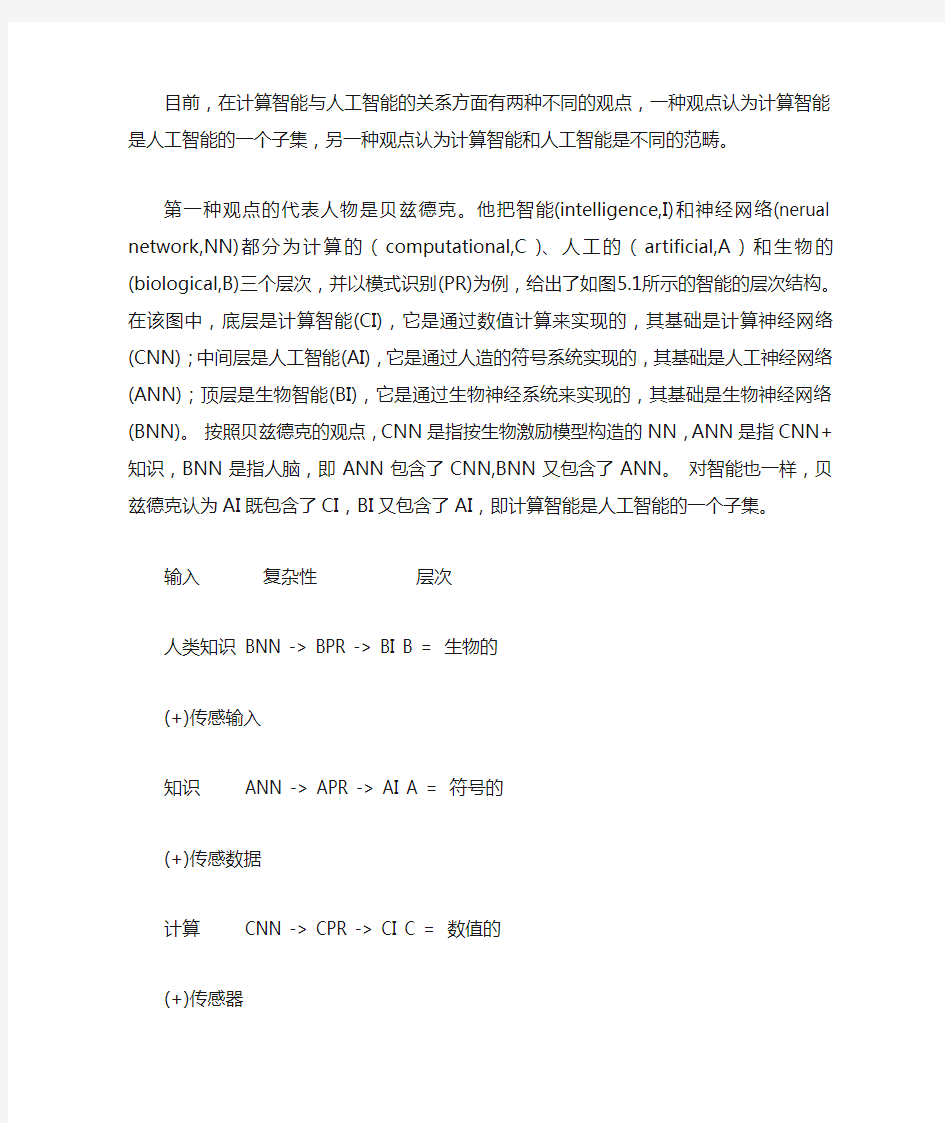
第一种观点的代表人物是贝兹德克。他把智能(intelligence,I)和神经网络(nerual network,NN)都分为计算的(computational,C)、人工的(artificial,A)和生物的(biological,B)三个层次,并以模式识别(PR)为例,给出了如图5.1所示的智能的层次结构。在该图中,底层是计算智能(CI),它是通过数值计算来实现的,其基础是计算神经网络(CNN);中间层是人工智能(AI),它是通过人造的符号系统实现的,其基础是人工神经网络(ANN);顶层是生物智能(BI),它是通过生物神经系统来实现的,其基础是生物神经网络(BNN)。按照贝兹德克的观点,CNN是指按生物激励模型构造的NN,ANN是指CNN+知识,BNN是指人脑,即ANN包含了CNN,BNN又包含了ANN。对智能也一样,贝兹德克认为AI既包含了CI,BI 又包含了AI,即计算智能是人工智能的一个子集。
输入复杂性层次
人类知识 BNN -> BPR -> BI B = 生物的
(+)传感输入
知识 ANN -> APR -> AI A = 符号的
(+)传感数据
计算 CNN -> CPR -> CI C = 数值的
(+)传感器
智能的三个层次第二种观点是大多数学者所持有的观点,其代表人物是埃卜哈特(R.C.Eberhart). 他们认为: 虽然人工智能与计算智能之间有重合,但计算智能是一个全新的科学领域,无论是生物智能还是机器智能,计算智能都是最核心的部分,而人工智能则是外层.
事实上,CI和传统的AI知识智能的两个不同层次,各自都有自身的优势和局限性,相互之间只应该互补,而不能取代. 大量实践证明,只有把AI和I很好地结合起来,才能更好地模拟人类只能,才是只能科学技术发展的正确方向.1、计算智能(Computational Intelligence,CI)是借助自然界(生物界)规律的启示,根据其规律,设计出求解问题的算法。物理学、化学、数学、生物学、心理学、生理学、神经科学和计算机科学等学科的现象与规律都可能成为计算智能算法的基础和思想来源。从关系上说,计算智能属于人工智能(Artificial Intelligence,AI)的一个分支。
2、计算智能算法主要包括神经计算、模糊计算和进化计算三大部分。如图1.4所示,典型的计算智能算法包括神经计算中的人工神经网络算法,模糊计算中的模糊逻辑,进化计算中的遗传算法、蚁群优化算法、粒子群优化算法、免疫算法、分布估计算法、Memetic算法,和单点搜索技术例如模拟退火算法、禁忌搜索算法,等等。
3、以上这些计算智能算法都有一个共同的特征就是通过模仿人类智能的某一个(某一些)方面而达到模拟人类智能,实现将生物智慧、自然界的规律计算机程序化,设计最优化算法的目的。然而计算智能的这些不同研究领域各有其特点,虽然它们具有模仿人类和其他生物智能的共同点,但是在具体方法上存在一些不同点。例如:人工神经网络模仿人脑的生理
构造和信息处理的过程,模拟人类的智慧;模糊逻辑(模糊系统)模仿人类语言和思维中的模糊性概念,模拟人类的智慧;进化计算模仿生物进化过程和群体智能过程,模拟大自然的智慧。
4、然而在现阶段,计算智能的发展也面临严峻的挑战,其中一个重要原因就是计算智能目前还缺乏坚实的数学基础,还不能像物理、化学、天文等学科那样自如地运用数学工具解决各自的计算问题。虽然神经网络具有比较完善的理论基础,但是像进化计算等重要的计算智能技术还没有完善的数学基础。计算智能算法的稳定性和收敛性的分析与证明还处于研究阶段。通过数值实验方法和具体应用手段检验计算智能算法的有效性和高效性是研究计算智能算法的重要方法。
人工智能(Artificial Intelligence) ,英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等
智能控制整理
第一章: 1、传统控制方法包括经典控制和现代控制,是基于被控对象精确模 型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制。 2、智能控制的研究对象具备以下的一些特点:不确定性的模型、高度的 非线性、复杂的任务要求。 3、IC(智能控制)=AC(自动控制)∩AI(人工智能) ∩OR(运筹学) 4、AC:描述系统的动力学特征,是一种动态反馈。AI :是一个用来模拟人 思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。OR:是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。 5、智能控制:即设计一个控制器,使之具有学习、抽象、推理、决策等功能, 并能根据环境信息的变化作出适应性,从而实现由人来完成的任务。 6、智能控制的几个重要分支为模糊控制、神经网络控制和遗传算 法。 7、智能控制的特点:1,学习功能2,适应功能3,自组织功能4,优化功能 8、智能控制的研究工具:1,符号推理与数值计算的结合2,模糊集理论3,神 经网络理论4,遗传算法5,离散事件与连续时间系统的结合。 9、智能控制的应用领域,例如智能机器人控制、计算机集成制造系统、工 业过程控制、航空航天控制和交通运输系统等。 第二章: 10、专家系统:是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。 11、专家系统的构成:由知识库和推理机(知识库由数据库和规则库两部分构成) 12、专家系统的建立:1,知识库2,推理机3,知识的表示4,专家系统开发语言5,专家系统建立步骤。 13、专家控制:是智能控制的一个重要分支,又称专家智能控制。所谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。
智能控制题目及解答
1. 神经网络的模型分类,分别画出网络图,简述其特点。 1)前向网络:神经网元分层排列,组成输入层,隐含层和输出层。每一层的神经元只能接收前一层神经元的输入。输入模式经过各层的顺次变换后,得到输出层数输出。个神经元之间不存在反馈。感知器和误差反向传播算法中使用的网络都属于这种模型。 1).2) 2)反馈网络:这种网路结构指的是只有输出层到输入层存在反馈,即每一个输入节点都有可能接受来自外部的输入和来自输出神经元的反馈。这种模式可用来存储某种模式序列,也可以动态时间序列系统的神经网络建模。 3)相互结合型网络:属于网状结构,这种神经网络模型在任意两个神经元之间都可能存在连接。信号要在神经元之间反复往返传递,网络处在一种不断改变的状态之中。从某个初态开始,经过若干次变化,才能达到某种平衡状态,根据网络结构和神经元的特性,还有可能进入周期震荡或混沌状态。 4)混合型网络:是层次型网络和网状结构网络的一种结合。通过层内神经元的相互结合,可以实现同一层内的神经元的横向抑制或兴奋机制,这样可以限制每层内能同时动作的神经元数,或者把每层内的神经元分成若干组,让每组作为一个整体来动作。 2. 神经网络学习算法有几种,分别画出网络图,简述其特点。 1)有导师学习:所谓有导师学习就是在训练过程中,始终存在一个期望的网络输出。期望输出和实际输出之间的距离作为误差度量并用于调整权值。 1. 2)无导师学习:网络不存在一个期望的输出值,因而没有直接的误差信息,因此,为实现对网络训练,需建立一个间接的评价函数,一对网络的某种行为趋向作出评价。 3、简述神经网络泛化能力。 答:人工神经网络容许某些变化,如当输入矢量带有噪声时,即与样本输出矢量存在差异时,其神经网络的输出同样能够准确地呈现出应有的输出。这种能力就成为泛化能力。 4、单层BP 网络与多层神经网络学习算法的区别。 1)单层神经网络的Delta 学习算法是通过对目标函数∑== N p p E E 1 的极小来实现的,其中E 的极小是通过有序地对每一个样本数据的输出误差Ep 的极小化来得到。Delta 规则的学习算法就是对∑=-= 1 2 )(2 1 n i pj pj y t E 所定义的目标函数值求梯度得到。 2)多层前向传播网络的权系数训练算法是利用著名的误差反向传播学习算法。根据这一算法,训练网络权阵的更新是通过反向传 播网路的期望输出(样本输出)与世纪输出的误差来实现的。 3、分别叙述模糊控制器四个模块设计内容,并写出设计步骤。 答:四个模块为:模糊化过程、知识库(含数据库和规则库)、推理决策逻辑、精确化计算。(PPT 上是:模糊化接口、规则库、模糊推理、清晰化接口) 设计步骤:1定义输入输出变量2定义所有变量的模糊化条件3设计控制规则库4设计模糊推理结构5选择精确化策略方法 PPT 上设计步骤是:(1)确定模糊控制器的输入变量和输出变量;(2)确定输入,输出的论域和Ke 、Kec 、Ku 的值;(3)确定各变量的语言取值及其隶属函数;(4)总结专家控制规则及其蕴涵的模糊关系;(5)选择推理算法; (6)确定清晰化的方法;(7)总结模糊查询表。 1. 什么是智能、智能系统、智能控制? 答:智能:能够自主的或者交互的执行通常与人类智能有关的智能行为,如判断、推理、证明、识别、感知、理解、通信、设计、思考、规划、学习等一系列活动的能力,即像人类那样工作和思维。 智能系统:是指具有一定智能行为的系统,对于一定的输入,它能产生合适的问题求解相应。 智能控制:智能控制是控制理论、计算机科学、心理学、生物学和运筹学等多方面综合而成的交叉学科,它具有模仿人进行诸如规划、学习、逻辑推理和自适应的能力。是将传统的控制理论与神经网络、模糊逻辑、人工智能和遗传算法等实现手段融合而成的一种新的控制方法。 4 把智能控制看作是AI(人工智能)、OR(运筹学)、AC(自动控制)和IT(信息论)的交集,其根据和内涵是什么? 答:人工只能(AI )是一个用来模拟人思维的知识处理系统,具有学习、记忆、信息处理、形式语言、启发推理等功能;自动控制(AC )描述系统的动力学特性,是一种动态反馈;运筹学(OR )是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等;信息论(IT )信息论是运用概率论与树立统计的方法研究信息、通信系统、数据传输、密码学、数据压缩等问题的应用数学学科。 早期产生的的二元结构被发现是很大程度上局限于符号主义的人工智能,无助于智能控制的有效的、成功的应用,所以后来又引入了运筹学。考虑到信息论对知识和智能的解释作用、控制论和系统论与信息之间的密切关系、信息论对智能控制的作用等方面
群智能优化算法综述
现代智能优化算法课程群智能优化算法综述 学生姓名: 学号: 班级: 2014年6月22日
摘要 工程技术与科学研究中的最优化求解问题十分普遍,在求解过程中,人们创造与发现了许多优秀实用的算法。群智能算法是一种新兴的演化计算技术,已成为越来越多研究者的关注焦点,智能优化算法具有很多优点,如操作简单、收敛速度快、全局收敛性好等。群智能优化是智能优化的一个重要分支,它与人工生命,特别是进化策略以及遗传算法有着极为特殊的联系。群智能优化通过模拟社会性昆虫的各种群体行为,利用群体中个体之间的信息交互和合作实现寻优。本文综述群智能优化算法的原理、主要群智能算法介绍、应用研究及其发展前景。 关键词:群智能;最优化;算法
目录 摘要 (1) 1 概述 (3) 2 定义及原理 (3) 2.1 定义 (3) 2.2 群集智能算法原理 (4) 3 主要群智能算法 (4) 3.1 蚁群算法 (4) 3.2 粒子群算法 (5) 3.3 其他算法 (6) 4 应用研究 (7) 5 发展前景 (7) 6 总结 (8) 参考文献 (9)
1 概述 优化是人们长久以来不断研究与探讨的一个充满活力与挑战的领域。很多实际优化问题往往存 在着难解性,传统的优化方法如牛顿法、共扼梯度法、模式搜索法、单纯形法等己难以满足人们需求。 因此设计高效的优化算法成为众多科研工作者的研究目标。随着人类对生物启发式计算的研究, 一些社会性动物( 如蚁群、蜂群、鸟群) 的自组织行为引起了科学家的广泛关注。这些社会性动物在漫长的进化过程中形成了一个共同的特点: 个体的行为都很简单, 但当它们一起协同工作时, 却能够“突现”出非常复杂的行为特征。基于此,人们设计了许多优化算法,例如蚁群算法、粒子群优化算法、混合蛙跳算法、人工鱼群算法,并在诸多领域得到了成功应用。目前, 群智能理论研究领域主要有两种算法: 蚁群算法(Ant Colony Optimization, ACO) 和粒子群优化算法(ParticleSwarm Optimization, PSO)。 2 定义及原理 2.1 定义 群集智能优化算法源于对自然界的生物进化过程或觅食行为的模拟。它将搜索和优化过程模拟成个体的进化或觅食过程,用搜索空间中的点模拟自然界中的个体;将求解问题的目标函数度量成个体对环境的适应能力;将个体的优胜劣汰过程或觅食过程类比为搜索和优化过程中用好的可行解取代较差可行解的迭代过程。从而,形成了一种以“生成+检验”特征的迭代搜索算法,是一种求解极值问题的自适应人工智能技术。各类优化算法实质上都是建立问题的目标函数,求目标函数的最优解,因而实际工程优化问题均可转化为函数优化问题。其表达形式如下: 求: ,,2,1,0)(..), (min , ,,2,1,),,,(21Lm j X g t s X f n L i x L x x X i T n i =≤== 。Ω∈X 其中, i X 为设计变量;)(X f 为被优化的目标函数;0)(≤X g j 为约束函数;Ω为设计变量的 可行域。
智能控制理论简述
智能控制理论简述 智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。智能控制是指驱动智能机器自主地实现其目标的过程,即无需人的直接干预就能独立地驱动智能机器实现其目标。其基础是人工智能、控制论、运筹学和信息论等学科的交叉,也就是说它是一门边缘交叉学科。 控制理论发展至今已有100多年的历史,经历了“经典控制理论”和“现代控制理论”的发展阶段,已进入“大系统理论”和“智能控制理论”阶段。智能控制理论的研究和应用是现代控制理论在深度和广度上的拓展。20世纪80年代以来,信息技术、计算技术的快速发展及其他相关学科的发展和相互渗透,也推动了控制科学与工程研究的不断深入,控制系统向智能控制系统的发展已成为一种趋势。 近20年来,智能控制理论(IntelligentControl Theory)与智能化系统发展十分迅速[1].智能控制理论被誉为最新一代的控制理论,代表性的理论有模糊控制(Fuzzy Control)、神经网络控制(Neural Networks Control)、基因控制即遗传算法(Genetic Aigorithms)、混沌控制[2](Chaotic Control)、小波理论[3](Wavelets Theo-ry)、分层递阶控制、拟人化智能控制、博奕论等.应用智能控制理论解决工程控制系统问题,这样一类系统称为智能化系统。它广泛应用于复杂的工业过程控制[4]、机器人与机械手控制[5]、航天航空控制、交通运输控制等.它尤其对于被控对象模型包含有不确定性、时变、非线性、时滞、耦合等难以控制的因素.采用其它控制理论难以设计出合适与符合要求的系统时,都有可能期望应用智能化理论获得满意的解决。 自从“智能控制”概念的提出到现在,自动控制和人士_智能专家、学者们提出了各种智能控制理论,下面对一些有影响的智能控制理论进行介绍。 (1)递阶智能(Hierarchical IntelligentControl) 阶智能控制是由G.N.Saridis提出的,它是最早的智能控制理论之一。它以早期的学习控制系统为基础,总结人工智能与自适应控制、自学习控制和自组织控制的关系后逐渐形成的。递阶智能控制遵循“精度随智能降低而提高”的原理分级分布。该控制系统由组织级、协调级、执行级组成。在递阶智能控制系统中,
自动控制现代控制与智能控制的关系
自动控制、现代控制与智能控制的关系 一、基本区别 控制理论发展至今已有100多年的历史,经历了“经典控制理论”和“现代控制理论”的发展阶段,已进入“大系统理论”和“智能控制理论”阶段。智能控制理论的研究和应用是现代控制理论在深度和广度上的拓展。20世纪80年代以来,信息技术、计算技术的快速发展及其他相关学科的发展和相互渗透,也推动了控制科学与工程研究的不断深入,控制系统向智能控制系统的发展已成为一种趋势。 自动控制理论中建立在频率响应法和根轨迹法基础上的一个分支。经典控制理论的研究对象是单输入、单输出的自动控制系统,特别是线性定常系统。经典控制理论的特点是以输入输出特性(主要是传递函数)为系统数学模型,采用频率响应法和根轨迹法这些图解分析方法,分析系统性能和设计控制装置。经典控制理论的数学基础是拉普拉斯变换,占主导地位的分析和综合方法是频率域方法。建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。 在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。它所采用的方法和算法也更适合于在数字计算机上进行。现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。 智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。 二、华山论剑:自动控制的机遇与挑战 传统控制理论在应用中面临的难题包括:(1)传统控制系统的设计与分析是建立在已知系统精确数学模型的基础上,而实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,一般无法获得精确的数学模型;(2)研究这类系统时,必须提出并遵循一些比较苛刻的假设,而这些假设在应用中往往与实际不相吻合;(3)对于某些复杂的和包含不确定性的对象,根本无法用传统数学模型来表示,即无法解决建模问题;(4)为了提高性能,传统控制系统可能变得很复杂,从而增加了设备的初始投资和维修费用,降低了系统的可靠性。 为了讨论和研究自动控制面临的挑战,早在1986年9月,美国国家科学基金会(NSF)及电气与电子工程师学会(1EEE)的控制系统学会在加利福尼亚州桑克拉拉大学(University of Santa Clare)联合组织了一次名为“对控制的挑战”的专题报告会。有50多位知名的自动控制专家出席了这一会议。他们讨论和确认了每个挑战。根据与会自动控制专家的集体意见,他们发表了《对控制的挑战——集体的观点》,洋洋数万言,简直成为这一挑战的宣言书。 到底为什么自动控制会面临这一挑战,还面临哪些挑战,以及在哪些研究领域存在挑战呢? 在自动控制发展的现阶段,存在一些至关重要的挑战是基于下列原因的:(1)科学技术
智能控制技术试卷
一、选择题 1、蔡自兴教授提出智能控制系统的四元结构,认为智能控制是人工智能、控制理论、系统理论和运筹学四种学科的交叉。 2、专家是指在某一专业领域内其专业知识与解决问题的能力达到很高水平的学者。 3、专家系统中的知识按其在问题求解中的作用可分为三个层次,即数据级、知识库级和控制级。 4、不确定性知识的表示有三种:概率、确定性因子和模糊集合。 5、Hebb学习规则是一种无教师的学习方法,它只根据神经元连接间的激活水平改变权值,因此这种方法又称为相关学习和并联学习。 6、交叉运算是两个相互配对的染色体按某种方式相互交换其部分基因,从而形成两个新的个体。 二、判断题 1、IEEE控制系统协会把智能控制归纳为:智能控制系统必须具有模拟人类学习和自适应的能力。(T ) 2、不精确推理得出的结论可能是不确定的,但会有一个确定性因子,当确定性因子超过某个域值时,结论便不成立。( F ) 3、一般的专家系统由知识库、推理机、解释机制和知识获取系统等组成。(T ) 4、人机接口是专家系统与领域专家、知识工程师、一般用户间进行交互的界面,由一组程序及相应的硬件组成,用于完成知识获取工作。( F ) 5、Hopfield神经网络是反馈神经网络中最简单且应用广泛的模型,它具有联想记忆的功能。(F ) 6、知识是将有关的信息进一步关联在一起,形成了更高层次含义的一种信息结构,信息与关联是构成知识的两个基本要素。(T ) 7、建造知识库涉及知识库建造的两项主要技术是知识获取和知识存放。(F ) 8、模糊控制系统往往把被控量的偏差(一维)、偏差变化(二维)以及偏差的变化率(三维)作为模糊控制器的输入。(T ) 9、RBF网络的学习过程与BP网络的学习过程是类似的,两者的主要区别在于使用了相同的激励函数。(F ) 10、应用遗传算法求解问题时,在编码方案、适应度函数及遗传算子确定后,算法将利用进化过程中获得的信息自信组织搜索。(T ) 三、简答题 1.分别说明专家系统与专家控制系统? 答:专家系统就是利用存储在计算机内的某一特定领域内人类专家的知识,来解决过去需要人类专家才能解决的现实问题的计算机系统。专家控制是将人工智能领域的专家系统理论和技术与控制理论方法和技术相结合,仿效专家智能,实现对较为复杂问题的控制。基于专家控制原理所设计的系统称为专家控制系统。 2.人工神经网络中两种典型的结构模型是什么?它们进行学习时具有哪些特点? 答:两种典型的结构模型是前馈神经网络和反馈神经网络。前馈神经网络有感知器和BP网络等;主要采用 学习规则,这是有教师学习方法。反馈神经网络有Hopfield神经网络、Boltzmann机网络等;主要采用Hebb学习规则,概率式学习算法。 3.应用遗传算法计算时,设计编码的策略与编码评估准则(即编码原则)是什么?
智能控制题目及解答
智能控制题目及解答 第一章绪论作业 作业内容 1.什么就是智能、智能系统、智能控制? 2.智能控制系统有哪几种类型,各自的特点就是什么? 3.比较智能控制与传统控制的特点。 4.把智能控制瞧作就是AI(人工智能)、OR(运筹学)、AC(自动控制)与 IT(信息论)的交集,其根据与内涵就是什么? 5.智能控制有哪些应用领域?试举出一个应用实例,并说明其工作原理与 控制性能。 1 答:智能:能够自主的或者交互的执行通常与人类智能有关的智能行为,如判断、推理、证明、识别、感知、理解、通信、设计、思考、规划、学习等一系列活动的能力,即像人类那样工作与思维。 智能系统:就是指具有一定智能行为的系统,对于一定的输入,它能产生合适的问题求解相应。 智能控制:智能控制就是控制理论、计算机科学、心理学、生物学与运筹学等多方面综合而成的交叉学科,它具有模仿人进行诸如规划、学习、逻辑推理与自适应的能力。就是将传统的控制理论与神经网络、模糊逻辑、人工智能与遗传算法等实现手段融合而成的一种新的控制方法。 2 答:(1)人作为控制器的控制系统:人作为控制器的控制系统具有自学习、自适应与自组织的功能。 (2)人-机结合作为作为控制器的控制系统:机器完成需要连续进行的并需快速计算的常规控制任务,人则完成任务分配、决策、监控等任务。 (3)无人参与的自组控制系统:为多层的智能控制系统,需要完成问题求解与规划、环境建模、传感器信息分析与低层的反馈控制任务。 3 答:在应用领域方面,传统控制着重解决不太复杂的过程控制与大系统的控制问题;而智能控制主要解决高度非线性、不确定性与复杂系统控制问题。 在理论方法上,传统控制理论通常采用定量方法进行处理,而智能控制系统大多采用符号加工的方法;传统控制通常捕获精确知识来满足控制指标,而智能控制通常就是学习积累非精确知识;传统控制通常就是用数学模型来描述系统,而智能控制系统则就是通过经验、规则用符号来描述系统。 在性能指标方面,传统控制有着严格的性能指标要求,智能控制没有统一的性能指标,而主要关注其目的与行为就是否达到。 但就是,智能控制与传统的或常规的控制有密切的关系,互相取长补短,而并非互相排斥。基于智能控制与传统控制在应用领域方面、理论方法上与性能指标等方面的差异,往往将常规控制包含在智能控制之中,智能控制也利用常规控制的方法来解决“低级”的控制问题,力图扩充常规控制方法并建立一系列新的理论与方法来解决更具有挑战性的复杂控制问题。 4 答:人工只能(AI)就是一个用来模拟人思维的知识处理系统,具有学习、记忆、信息处理、形式语言、启发推理等功能;自动控制(AC)描述系统的动力学特性,就是一种动态反馈;运筹学(OR)就是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策与多目标优化方法等;信息论(IT)信息论就是运用概率论与树立统计的方法研究信息、通信系统、数据传输、密码学、数据压缩等问题的应用数学学科。 早期产生的的二元结构被发现就是很大程度上局限于符号主义的人工智能,无助于智能控制的
计算智能主要算法研究
-3- 研究与探索 200912 计算智能主要算法研究 田晓艳 中国人民武装警察部队学院,河北廊坊,065000 【摘要】【关键词】本文介绍了计算智能及其四种主要算法:人工神经网络、模糊算法、进化算法、蚁群算法。详细描述了每个算法的生物学基础、计算原理及其特点,以及基于每个算法的优化设计,并对它们已有的成果及在工程应用中所存在问题作简要的讨论。最后总结了四种算法的优势并预测了计算智能的发展趋势。 计算智能 人工神经网络 模糊算法 进化算法 蚁群算法 一、概述 二、计算智能的主要算法 计算智能,广义的讲就是借鉴仿生学思想,基于生物体系的生物进化、细胞免疫、神经细胞网络等某些机制,用数学语言抽象描述的计算方法。是基于数值计算和结构演化的智能,是智能理论发展的高级阶段。计算智能有着传统的人工智能无法比拟的优越性,它的最大特点就是不需要建立问题本身的精确模型,非常适合于解决那些因为难以建立有效的形式化模型而用传统的人工智能技术难以有效解决、甚至无法解决的问题。从方法论的角度和现在的研究现状,计算智能的主要算法有:人工神经网络、模糊算法、进化算法、模拟退火、忌搜索算法、DNA软计算、人工免疫系统、蚁群算法、粒子群算法、多代理(Agent)系统等。 本文对计算智能的四种算法:人工神经网络、模糊计算、进化计算、蚁群算法的生物学基础、计算原理及其特点作一个简单的综述,并对它们已有的成果及工程应用与存在问题作简要的讨论。 计算智能是在神经网络、进化计算及模糊系统这 [1] 三个领域发展相对成熟的基础上形成的一个统一概念。其中,神经网络是一种对人类智能的结构模拟方法,它是用于人工神经网络系统去模拟生物神经系统的智能机理的;进化运算是一种对人类智能的演化模拟方法,它是用进化算法去模拟人类智能的进化规律的;模糊计算是一种对人类智能的逻辑模拟方法,它是用模糊逻辑去模拟人类的智能行为的。 (1)神经网络的生物学基础 神经系统的基本构造是神经元(神经细胞),它是处理人体内各部分之间相互信息传递的基本单元。每个神经元都由一个细胞体,一个连接其他神经元的轴突和一些向外伸出的其它较短分支——树突组成。轴突的功能是将本神经元的输出信号(兴奋)传递给别的神经元。其末端的许多神经末梢使得兴奋可以同时传送给多个神经元。树突的功能是接受来自其它神经元的兴奋。神经元细胞体将接受到的所有信号进行简单处理(如加权求和,即对所有的输入信号都加以考虑且对每个信号的重视程度——体现在权值上——有所不同)后由轴突输出。 [2] 1、人工神经网络
智能控制技术现状与发展
摘要:在此我综述智能控制技术的现状及发展,首先简述智能控制的性能特点及主要方法;然后介绍智能控制在各行各业中的应用现状;接着论述智能控制的发展。智能控制技术的主要方法,介绍了智能控制在各行各业中的应用。随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出犷新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。 关键词:智能控制应用自动化 浅谈智能控制技术现状及发展 在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。对许多复杂的系统,难以建立有效的数学模型和用常规的控制理论去进行定量计算和分析,而必须采用定量方法与定性方法相结合的控制方式。定量方法与定性方法相结合的目的是,要由机器用类似于人的智慧和经验来引导求解过程。因此,在研究和设计智能系统时,主要注意力不放在数学公式的表达、计算和处理方面,而是放在对任务和现实模型的描述、符号和环境的识别以及知识库和推理机的开发上,即智能控制的关键问题不是设计常规控制器,而是研制智能机器的模型。此外,智能控制的核心在高层控制,即组织控制。高层控制是对实际环境或过程进行组织、决策和规划,以实现问题求解。为了完成这些任务,需要采用符号信息处理、启发式程序设计、知识表示、自动推理和决策等有关技术。这些问题求解过程与人脑的思维过程有一定的相似性,即具有一定程度的“智能”。 一、智能控制的性能特点及主要方法 1.1根据智能控制的基本控制对象的开放性,复杂性,不确定性的特点,一个理想的智能控制系统具有如下性能: (1)系统对一个未知环境提供的信息进行识别、记忆、学习,并利用 积累的经验进一步改善自身性能的能力,即在经历某种变化后,变化后的
计算智能主要算法的比较与融合
第1期2007年2月 中国电子科学研究院学报 Journal of C AE I T Vol .2No .1Feb .2007 收稿日期:2006211218 修订日期:2007201205 基础理论 计算智能主要算法的比较与融合 苏建元 (河海大学电气工程学院,南京 210024) 摘 要:计算智能算法的融合可以有效解决实际问题,但算法选择带有一定盲目性。文章对计算智能的主要算法———人工神经网络、人工免疫系统、模糊系统和遗传算法等的特性进行比较,提出了四种融合形态———串联型、并联型、部分融合型和完全融合型,以及融合步骤、融合的数学描述,讨论了六种融合算法的特点和方法。融合提高了算法性能、扩大了应用范围。通过比较明确了计算智能算法的选择方法和进一步研究的方向;通过仿真分析说明了算法融合思路的正确性。关键词:神经网络;模糊系统;遗传算法;免疫系统;计算智能中图分类号:TP301 文献标识码:A 文章编号:167325692(2007)012052205 Co mpar ison and Fusi on of Co m put a ti ona l I n telli gence ’s Ma i n Algor ith m s S U J ian 2yuan (College of Electrical Engineering,Hehai University,Nanjing 210024,China ) Abstract:The fusi on of computati onal intelligence ′s algorith m s may be able t o s olve actual p r oble m s,but the method of selecting the algorith m s may not be s o scientific .The characteristics of f our maj or algo 2rithm s 2artificial neural net w ork,artificial i m mune syste m ,fuzzy l ogic syste m ,and genetic algorithm 2are compared in this paper .Fusi on step s,fusi on algorith m definiti on,and f our kinds of fusi on shapes (se 2 ries,parallel,partial,and comp lete )are p r oposed .The characteristics and methods of six fusi on algo 2rithm s are als o discussed .The fusi on enhances alg orithm ′s perf or mance and expands app licati on ′s scope .Both the method of selecting algorithm s and the further research directi on in computati onal intelligence are given thr ough comparis on .The si m ulati on study indicates that this algorith m fusi on mentality is correct .Key words:neural net w ork;fuzzy syste m;genetic algorith m;i m mune syste m;computati onal intelli 2 gence 0 引 言 生物信息系统主要包括神经网络、遗传系统、免疫系统和内分泌系统。对免疫系统、神经网络、模糊和遗传进化等生物现象和信息处理体系的借鉴和利用已经形成一个新型的学科———生物计算智能系统,简称计算智能。计算智能是在1994年I EEE 举办的首届计算智能世界大会上提出的,它以连接主义和进化主义思想为基础,计算智能中的主要算法 具有自适应的结构、随机产生的或指定的初始状态、 适应度的评测函数、修改结构的操作、系统状态存储器、终止计算的条件、指示结果的方法、控制过程的参数等共同要素,具有自学习、自组织、自适应的特征和简单、通用、鲁棒性强、易并行处理等特点,这些特征已被应用于信息安全、模式识别、数据分类与挖掘、优化设计、故障诊断、机器学习、联想记忆和控制等领域。计算智能的各领域服从“开放式计算系 统”的统一模型[1] ,但它们也有一定的差别,国内外介绍有关计算智能算法融合的资料比较少,文献
智能控制技术及其发展趋势
智能控制技术及其发展趋势 智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。对许多复杂的系统,难以建立有效的数学模型和用常规的控制理论去进行定量计算和分析,而必须采用定量方法与定性方法相结合的控制方式。定量方法与定性方法相结合的目的是,要由机器用类似于人的智慧和经验来引导求解过程。因此,在研究和设计智能系统时,主要注意力不放在数学公式的表达、计算和处理方面,而是放在对任务和现实模型的描述、符号和环境的识别以及知识库和推理机的开发上,即智能控制的关键问题不是设计常规控制器,而是研制智能机器的模型。此外,智能控制的核心在高层控制,即组织控制。高层控制是对实际环境或过程进行组织、决策和规划,以实现问题求解。为了完成这些任务,需要采用符号信息处理、启发式程序设计、知识表示、自动推理和决策等有关技术。这些问题求解过程与人脑的思维过程有一定的相似性,即具有一定程度的“智能”。 随着人工智能和计算机技术的发展,已经有可能把自动控制和人工智能以及系统科学中一些有关学科分支(如系统工程、系统学、运筹学、信息论)结合起来,建立一种适用于复杂系统的控制理论和技术。智能控制正是在这种条件下产生的。它是自动控制技术的最新发展阶段,也是用计算机模拟人类智能进行控制的研究领域。1965年,傅京孙首先提出把人工智能的启发式推理规则用于学习控制系统。1985年,在美国首次召开了智能控制学术讨论会。1987年又在美国召开了智能控制的首届国际学术会议,标志着智能控制作为一个新的学科分支得到承认。智能控制具有交叉学科和定量与定性相结合的分析方法和特点。 一个系统如果具有感知环境、不断获得信息以减小不确定性和计划、产生以及执行控制行为的能力,即称为智能控制系统。智能控制技术是在向人脑学习的过程中不断发展起来的,人脑是一个超级智能控制系统,具有实时推理、决策、学习和记忆等功能,能适应各种复杂的控制环境。 智能控制与传统的或常规的控制有密切的关系,不是相互排斥的。常规控制往往包含在智能控制之中,智能控制也利用常规控制的方法来解决“低级”的控制问题,力图扩充常规控制方法并建立一系列新的理论与方法来解决更具有挑战性的复杂控制问题。
智能控制习题答案54733
第一章绪论 1. 什么是智能、智能系统、智能控制? 答:“智能”在美国Heritage词典定义为“获取和应用知识的能力”。 “智能系统”指具有一定智能行为的系统,是模拟和执行人类、动物或生物的某些功能的系统。 “智能控制”指在传统的控制理论中引入诸如逻辑、推理和启发式规则等因素,使之具有某种智能性;也是基于认知工程系统和现代计算机的强大功能,对不确定环境中的复杂对象进行的拟人化管理。 2.智能控制系统有哪几种类型,各自的特点是什么? 答:智能控制系统的类型:集散控制系统、模糊控制系统、多级递阶控制系统、专家控制系统、人工神经网络控制系统、学习控制系统等。 各自的特点有: 集散控制系统:以微处理器为基础,对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统。该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管 AHA12GAGGAGAGGAFFFFAFAF
理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。 人工神经网络:它是一种模范动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。 专家控制系统:是一个智能计算机程序系统,其内部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的经验方法来处理该领域的高水平难题。可以说是一种模拟人类专家解决领域问题的计算机程序系统。 多级递阶控制系统是将组成大系统的各子系统及其控制器按递阶的方式分级排列而形成的层次结构系统。这种结构的特点是:1.上、下级是隶属关系,上级对下级有协调权,它的决策直接影响下级控制器的动作。2.信息在上下级间垂直方向传递,向下的信息有优先权。同级控制器并行工作,也可以有信息交换,但不是命令。3.上级控制决策的功能水平高于下级,解决的问题涉及面更广,影响更大,时间更长,作用更重要。级别越往上,其决策周期越长,更关心系统的长期目标。4.级别越往上,涉及的问题不确定性越多,越难作出确切的定量描述和决策。 学习控制系统:靠自身的学习功能来认识控制对象和外界环境的特性,并相应 地改变自身特性以改善控制性能的系统。这种系统具有一定的识别、判断、记 AHA12GAGGAGAGGAFFFFAFAF
(完整版)《计算智能》授课大纲
《计算智能》授课大纲课程性质:必修课,3学分,共48~54课时(共16周)。 一、课程介绍 《计算智能》课程对计算智能领域的主要算法进行介绍,重点讨论各种算法的思想来源、流程结构、发展改进、参数设置和相关应用。内容包括绪论以及进化计算、群体智能、人工免疫算法、分布估计算法、神经网络、模糊逻辑和多目标进化算法等。并从工程应用及与其他人工智能研究方向相结合的角度讨论人工智能的实际问题及其解决方法。 二、教学内容 1.导论(1课时) (1)计算智能简介 (2)计算智能典型方法 2.优化理论(2课时) (1)优化问题 (2)优化方法分类 a)非约束优化 b)约束优化 c)多解问题 d)多目标优化 e)动态优化问题
3.进化计算(9课时) (1)进化计算导论 (2)遗传算法 a)经典遗传算法 b)交叉、变异 c)控制参数 d)模式定理与积木块假设 e)遗传算法的变体 f)前沿专题(小生境遗传算法、约束处理、多目标优化、动态环 境) g)应用 (3)遗传编程、进化规划、进化策略 (4)差分进化 (5)文化计算 (6)协同进化 4.人工免疫系统(6课时) (1)自然免疫系统 (2)人工免疫模型 a)克隆选择模型 b)网络理论模型 c)危险理论 (3)免疫优化计算
5.群体智能(3课时) (1)粒子群优化 (2)蚁群算法 6.多目标进化算法及应用(6课时) 5.1 绪论 5.2 主要的多目标进化算法 5.3 多目标进化算法性能评价和问题测试集 5.4 多目标优化的新进展 5.5 应用实例 7.神经网络(6课时) (1)人工神经元 (2)监督学习神经网络 (3)非监督学习神经网络 (4)径向基函数网络 (5)增强学习 (6)监督学习的性能问题 8.深度学习算法(Deep Learning)(3课时) 9.分布估计算法(3课时) 10.计算智能算法在各研究方向的应用(6~9课时) (讨论计算智能算法在每个研究生的研究方向中的结合应用) 三、教材与参考书 2、张军,詹志辉.计算智能[M].清华大学出版社[北京].2009.11.
智能控制理论及其应用论文
智能控制理论及其应用 [摘要] 本文回顾了智能控制理论的提出与发展过程,介绍了智能控制的特点,给出了智能控制理论的主要类型及其特点,列举了智能控制理论与技术的主要应用领域,最后总结了智能控制理论的发展趋势。 [关键词] 智能控制模糊控制神经网络专家控制[abstract] this paper reviewed the development of intelligence control, and introduced its main methods and characteristics, and particularized their mostly application fields, and pointed out the prospects of intelligent control development trend and put forward the study direction. [key words] intelligent control fuzzy control net neural expert control 0.引言 随着工业和自动化技术的发展,控制理论的应用日趋广泛,所涉及的控制对象日益复杂化,对控制性能的要求也越来越高,控制对象或过程的复杂性主要体现在系统缺乏精确的数学模型、具有高维的判定空间、多种时间尺度和多种性能判据等,要求控制理论能够处理复杂的控制问题和提供更为有效的控制策略。现代控制理论从理论上解决了系统的可观、可控、稳定性以及许多复杂系统的控制。但实际中的许多复杂系统具有非线性、时变性、不确定性、多层次、多因素等热点,难以建立精确的数学模型,因此需要引入新
智能优化算法综述
智能优化算法的统一框架 指导老师:叶晓东教授 姓名:李进阳 学号:2 班级:电磁场与微波技术5班 2011年6月20日
目录 1 概述 (3) 2群体智能优化算法.................................. 错误!未定义书签。 人工鱼群算法 (4) 蚁群算法 (5) 混合蛙跳算法 (9) 3神经网络算法 (10) 神经网络知识点概述 (10) 神经网络在计算机中的应用 (11) 4模拟退火算法 (15) 5遗传算法.......................................... 错误!未定义书签。 遗传算法知识简介 (17) 遗传算法现状 (18) 遗传算法定义 (19) 遗传算法特点和应用 (20) 遗传算法的一般算法 (21) 遗传算法的基本框架 (26) 6总结 (28) 7感谢 (29)
1概述 近年来,随着人工智能应用领域的不断拓广,传统的基于符号处理机制的人工智能方法在知识表示、处理模式信息及解决组合爆炸等方面所碰到的问题已变得越来越突出,这些困难甚至使某些学者对强人工智能提出了强烈批判,对人工智能的可能性提出了质疑。众所周知,在人工智能领域中,有不少问题需要在复杂而庞大的搜索空间中寻找最优解或准优解。像货朗担问题和规划问题等组合优化问题就是典型的例子。在求解此类问题时,若不能利用问题的固有知识来缩小搜索空间则会产生搜索的组合爆炸。因此,研究能在搜索过程中自动获得和积累有关搜索空间的知识,并能自适应地控制搜索过程,从而得到最优解或准有解的通用搜索算法一直是令人瞩目的课题。智能优化算法就是在这种背景下产生并经实践证明特别有效的算法。 2群体智能优化算法 自然界中群体生活的昆虫、动物,大都表现出惊人的完成复杂行为的能力。人们从中得到启发,参考群体生活的昆虫、动物的社会行为,提出了模拟生物系统中群体生活习性的群体智能优化算法。在群体智能优化算法中每一个个体都是具有经验和智慧的智能体 (Agent) ,个体之间存在互相作用机制,通过相互作用形成强大的群体智慧来解决复杂的问题。自 20世纪 90年代模拟蚂蚁行为的蚁群算法(ACO)提出以来,又产生了模拟鸟类行为的微粒群算法 ( PSO)、模拟鱼类生存习性的人工鱼群算法、模拟青蛙觅食的混合蛙跳算法 ( SFLA)等。这些群体智能优化算法的出现,使原来一些复杂的、难于用常规的优化算法进行处理的问题可以得到解决,大大增强了人们解决和处理优化问题的能力,这些算法不断地用于解决工程实际中的问题,使得人们投入更大的精力对其理论和实际应用进行研究。群体智能优化算法本质上是一种概率搜索,它不需要问题的梯度信息具有以下不同于传统优化算法的特点: ①群体中相互作用的个体是分布式的,不存在直接的中心控制,不会因为个别个体出现故障而影响群体对问题的求解,具有较强的鲁棒性; ②每个个体只能感知局部信息,个体的能力或遵循规则非常简单,所以群体智能的实现简单、方便; ③系统用于通信的开销较少,易于扩充; ④自
智能控制理论与方法
智能控制理论与方法 智能控制是自动控制发展的高级阶段,是人工智能、控制论、系统论、信息论、仿生学、神经生理学、进化计算和计算机等多种学科的高度综合与集成,是一门新兴的边缘交叉学科。它不仅包含了自动控制、人工智能、运筹学和信息论的内容,而且还从计算机科学、生物学、心理学等学科中汲取营养。什么又是智能控制理论呢? 智能控制的概念和原理是针对被控对象及其环境、控制目标或任务的复杂性和不确定性而提出来的。对“智能控制”这一术语没有确切的定义,但是也有前辈做过归纳总结的,例如,IEEE控制系统协会归纳为:只能控制系统必须具有模拟人类学习(Learning)和自适应(Adaptation)的能力。智能控制系统是智能机自动完成其目标的控制过程,由智能机参与生产过程自动控制的系统称为智能控制系统。定性的说,智能控制系统应具有学习、记忆和大范围的自适应和自组织能力;能够及时地适应不断变化的环境;能有效的处理各种信息,以减小不确定性;能够以安全和可靠地方式进行规划、生产和执行控制动作而达到预定的目的和良好的性能指标。 智能控制系统一般具有以知识表示的非数学广义模型和艺术学模型表示的混合控制过程。它适用于含有复杂性、不完全性、模糊性、不确定和不存在的已知算法的生产过程。它根据被控动态过程特征辨识,采用开闭环控制盒定性与定量控制相结合的多模态的控制方式。 智能控制器具有分层信息处理和决策机构。它实际上是对人神经
结构或专家决策机构的一种模仿。复杂的系统中,通常采用任务分块、控制分散方式。智能控制核心在高层控制,它对环境或过程进行组织、决策和规划,实现广义求解。要实现此任务需要采集符号信息处理、启发式程序设计、知识展示及自动推理和决策的相关技术。底层控制也属于智能控制系统不可缺少的一部分,一般采用常规控制。智能控制器也具有非线性。这是因为认得思维具有非线性,作为模仿人的思维进行决策的智能控制也具有非线性。由于智能控制器具有在线特征辨识、特征记忆和拟人特点,在整个控制过程中计算机在线获取信息和实时处理并给出控制决策,通过不断优化参数和寻找控制器的最佳结构方式,以获取整体最有控制性能。 模糊控制系统是智能控制的重要组成部分。模糊控制器是非线性控制器,许多传统的建模、分析和设计方法可以直接采用。任何的控制都有其数学理论和数学基础,模糊控制系统的数学基础是模糊集合、模糊规则和模糊推理。模糊集合就是指具有某个模糊概念所描述的属性的对象的全体,这一概念是美国加利福尼亚大学控制论专家L.A.扎德于 1965 年首先提出的。模糊集合这一概念的出现使得数学的思维和方法可以用于处理模糊性现象,从而构成了模糊集合论(中国通常称为模糊性数学)的基础。 模糊控制的核心就是利用模糊集合理论,把表达的人控制策略的自然语言转化为计算机能够承受的算法语言的控制算法,这种方法不仅能实现控制,而且能模拟人的思维方式,对一些无法构造的数学模 型的被控对象进行有效的控制。模糊控制与一般的自动控制的根本区