三菱FR A700变频器闭环矢量控制方式的学习
三菱FR-A700变频器在某工厂铝连铸连轧机上的应用
引言
三菱FR-A700变频器闭环矢量控制方式,主要用于高精度的速度控制、转矩控制、简单伺 服控制等对控制性能要求严格的场合。
在该方式下采用的速度传感器一般是旋转编码器,
并
安装在被控电动机的轴端。通过对铝连铸连轧机上下辊电机的速度和转矩控制来实现铝板的 高精度轧制,并能实现系统的稳定性和可靠性。
1、项目背景
某工厂铝连铸连轧机的主要工作是将经原炉熔炼、
静止炉精炼后的高温铝液在快速冷却的同
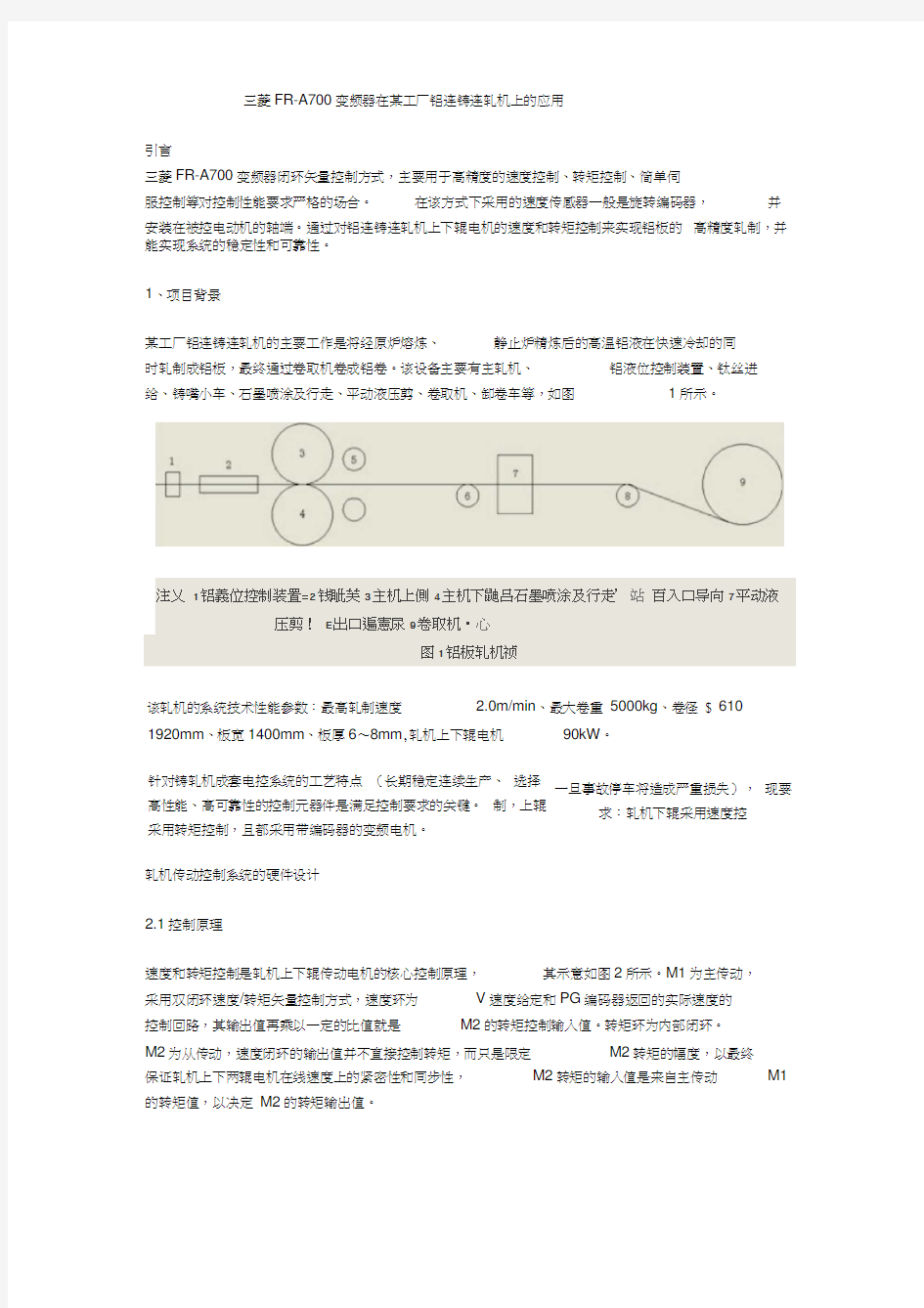
时轧制成铝板,最终通过卷取机卷成铝卷。该设备主要有主轧机、 铝液位控制装置、钛丝进
给、铸嘴小车、石墨喷涂及行走、平动液压剪、卷取机、卸卷车等,如图
1所示。
轧机传动控制系统的硬件设计
2.1控制原理
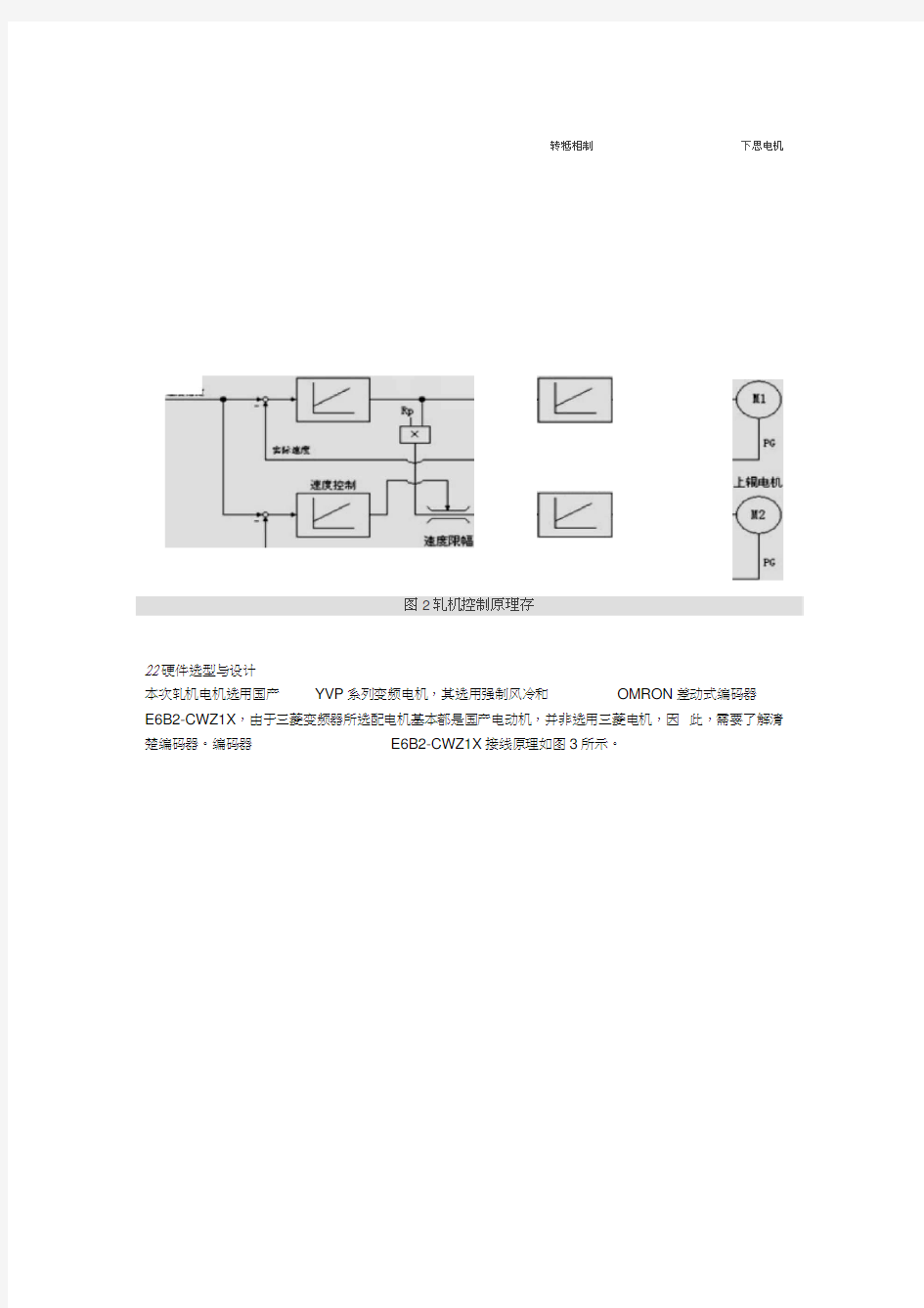
速度和转矩控制是轧机上下辊传动电机的核心控制原理, 其示意如图2所示。M1为主传动,
采用双闭环速度/转矩矢量控制方式,速度环为 V 速度给定和PG 编码器返回的实际速度的 控制回路,其输出值再乘以一定的比值就是
M2的转矩控制输入值。转矩环为内部闭环。
M2为从传动,速度闭环的输出值并不直接控制转矩,而只是限定
M2转矩的幅度,以最终
保证轧机上下两辊电机在线速度上的紧密性和同步性, M2转矩的输入值是来自主传动
M1
的转矩值,以决定 M2的转矩输出值。
1920mm 、板宽1400mm 、板厚6?8mm ,轧机上下辊电机
90kW 。
针对铸轧机成套电控系统的工艺特点 (长期稳定连续生产、 选择高性能、高可靠性的控制元器件是满足控制要求的关键。 制,上辊采用转矩控制,且都采用带编码器的变频电机。 一旦事故停车将造成严重损失), 现要
求:轧机下辊采用速度控
该轧机的系统技术性能参数:最高轧制速度 2.0m/min 、最大卷重 5000kg 、卷径 $ 610
转牴相制下思电机
图2轧机控制原理存
22硬件选型与设计
本次轧机电机选用国产YVP系列变频电机,其选用强制风冷和OMRON差动式编码器
E6B2-CWZ1X,由于三菱变频器所选配电机基本都是国产电动机,并非选用三菱电机,因此,需要了解清楚编码器。编码器E6B2-CWZ1X接线原理如图3所示。
转牴相制 下思电机
欧姆龙编码器E6B2-CWZ1X 接线端子功能定义如上图所示,它采用
电源,输出对
A 、
B 、Z 相差动信号。右图为编码器 E6B2-CWZ1X 接线端子功能定义 2.3轧机变频器硬件接线图
轧机变频器硬件接线图如下图所示。
VF1下辊变频器的速度设定采用电位器,
并连接了 PLG 差动输入信号作为闭环矢量控制的反馈信号,
跳线设置如图中标识所示,
同时输出转矩信号
给VF2变频器。VF2上辊变频器采用转矩控制,其转矩命令来自于 VF1的输出,速度限幅
来自于VF1的速度。
r
M : Affi 右PE 气苗
蓼出
反转tfi 出
t 叭土冲.肯垃:BW-
ZM .'
-------------- 0V
GND
BHI H
_ L L
>M(+Vcc)
ttdiAHl
'V ?|
WHjAlll
石
谦辿 UaBAI
wimzA
Wh 滙也
OVfCOMMONi
ESB2 主
旦甜
AM26 LS31
阳斗
H A IB L 日相: 2ffi H L A*e H
3、轧机变频控制系统的参数设置 VF1速度控制参数设置如表所示
速虞控刮时
VF1变硕器藝数没置
参数代码 功能简述 设定数据
Pr. 71 胡电机
3〔其他品牌标椎电机) Pr. 73
模拟zHSf 入诜择 1(0昂信号)
Pr. 79 运行模式选择 2〔固定外部运行模式) Pr. SO 电机容量 90KW Pr. 81
电机概数
4
Pr. 158 AH 端子功能选择 p2〔转矩指令) Pr. 178
51^<^功能选择 60 (正转) Pr. 179 STK 端子功能选择 61 (反转)
Pr. 3的 PLG 转动方向 0〔根据实际情况调整) Pr. 369 PLGg 冲数量
1024〔根据订货号输入) Pr. 800
控制方袪选择
0 (速度控制)
带PLG 标淮电机<$F-JRJ ?W 差动线鞭动器的惜况
擢点
■
J3-
~~rr 倾率洽曹飞丄丄 牧宦世定
SS LT77 1/2I1KO
转那 (41 垠初FS 令]) (士和 V )
NrB
T/U
QlO
PB 1
PB
?
FR :
*7^p"'
虫JI HTLC 电机
<■
s -irtfcj
矢昂控制专用电机 SF-V5RU | 让
Y 互补眸
VF2转矩控制参数设置如表所示。
转矩控制时
VF2变频器卷址渥置
参数代码
功能简述 设定数据
Pr. 71 适用电机 3〔其他品牌标准电机) Pr. 73 模拟量输入选择 1 (O-5V< 号) Pr. 79 运行模式选择 2〔固定外部运行模式)
Pr. 80 电机容量: 90KW Pr, 31 电机极数
4
Pr.178 STF 端子功能选择 60 (正转) Pr.179 ET 皤子功能选择 61 (反转)
Pr. 359 PLG 转动方问 0〔根据实际情况调整) Pr.369 PLG 脉冲数量
1024〔根据订货号输入) Pr.300 控制方法选择 1 (转矩控制) Pr. 304 转矩指令权选择 0 (模拟量1通道) Pr. 80.7 速度限制选择
01速度控制时的速度指令
值)
Pr. S6S
端子1功能分a 己
3或4 (转矩指令)
4、调试中出现的问题
(1)轧机主传动 M1下辊电机不转动。原因可能是:电机布线错误; PLG 规格(选择开关
FR-A7AP )错误;PLG 布线错误;Pr.369 PLG 脉冲数设定和使用的 PLG 脉冲数不同;PLG 电源规格错
误或未输入电源。 解决的办法:
(a )布线的确认。输入正转信号,从电机轴方向观察,如果是逆时针方向转动,则为正常
带PL£标准电机(SF-JR | . 5V^动线炎动器时
矢吊控制专用电机 SF-V5RU
I 汕互补时
SM>
U
V
w
?
3 WftL!
~7P
i
55 KA '
V
锁辛谡定it
varik o
忆
转狂限別(a*「;
i
(iJW ) '
SF JR 带代占电亂 Ml PA2 O? _ ? PH MJ U (顺时针方向说明变频器2次侧接线的相序有误)。 (b)PLG规格的确认。确认差动/互补的PLG规格选择开关(FR-A7AP )。 (c)矢量控制设定下,在变频器停止过程中将电机从外部逆时针方向旋转,确认有无FWD 的显示。显示REV时,说明PLG的相序错误。应正确布线,或调整Pr.359 PLG转向的设定值以保持一致。 (d)参数设定值比使用的PLG脉冲数量少时,电机将不会转动。应正确设定Pr.369 PLG 脉冲数量。 (e)确认PLG的电源规格(5V/12V/15V/24V),输入外部电源。 (2)轧机轧制过程不稳定。原因可能是:速度控制增益与机械不匹配;由于变频器的加减速时间,响应性变差。 解决办法:实施简单增益调整;调整Pr.820,Pr.821;实施速度前馈控制,模型适应速度控 制;将加减速时间设为最佳值。 5、结语 有速度传感器的矢量控制方式,主要用于高精度的速度控制、转矩控制、简单伺服控制等对 控制性能要求严格的使用场合。在该方式下采用的速度传感器一般是旋转编码器,并安装在 被控电动机的轴端。在铝连铸连轧机中,用2台高精度闭环矢量A700变频器进行控制,较 好地解决了铝板高精度、高转矩的工业要求。 变频器的V/F控制与矢量控制 U/f=C的正弦脉宽调制(SPWM)控制方式其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。 矢量控制(VC)方式 矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。 V/F控制与矢量都是恒转矩控制。U/F相对转矩可能变化大一些。而矢量是根据需要的转矩来调节的,相对不好控制一些。对普通用途。两者一样。 1、矢量控制方式 矢量控制,最简单的说,就是将交流电机调速通过一系列等效变换,等效成直流电机的调速特性,就这么简单,至于深入了解,那就得深入了解变频器的数学模型,电机学等学科。 矢量控制原理是模仿直流电动机的控制原理,根据异步电动机的动态数学模型,利用一系列坐标变换把定子电流矢量分解为励磁分量和转矩分量,对电机的转矩电流分量和励磁分量分别进行控制。 在转子磁场定向后实现磁场和转矩的解耦,从而达到控制异步电动机转矩的目的,使异步电机得到接近他励直流电机的控制性能。具体做法是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。 2、V/F控制方式 V/F控制,就是变频器输出频率与输出电压的比值为恒定值或成比例。例如,50HZ时输出电压为380V的话,则25HZ时输出电压为190V。 变频器采用V/F控制方式时,对电机参数依赖不大,V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。V/f控制变频器结构非常简单,但是这种变 变频器矢量控制与VF控制区别 一、V/F控制方式 变频器采用V/F控制方式时,对电机参数依赖不大,一般强调“空载电流”的大小。由于我们采用矢量化的V/F控制方式,故做电机参数静止自整定还是有必要的。不同功率段的变频器,自学习后的空载电流占额定电流大小百分比也是不同的。 一般有如下百分比数据:5.5kW~15 kW,空载电流P9.05的值为30%~50%的电机额定电流;3.7 kW及以下的,空载电流P9.05的值为50%左右的电机额定电流;特殊情况时,0.4 kW、0.75 kW、1.5 kW,空载电流P9.05的值为70%~80%的电机额定电流;有的0.75 kW功率段,参数自整定后空载电流为电机额定电流的90%。空载电流很大,励磁也越大。 何为矢量化的V/F控制方式,就是在V/F控制时也将输入电流量进行解耦控制,使控制更加精确。 变频器输出电流包括两个值:空载电流和力矩电流,输出电流I的值为空栽电流Im和力矩电流It平方和后开2次方。故空载电流是影响变频器输出电流的主要因素之一。 V/F控制时输出电压与运行频率之比为一定值:即U/F=K(K为常数),P0.12=最大输出电压U,P0.15=基频F。三菱变频器资讯 上图中有个公式,描述转矩、转速、功率之间的关系。变频器在基频以下运行时,随着速度增快,可以输出恒定的转矩,速度增大不会影响转矩的输出;变频器在基频以上运行时,只能保证输出额定的功率,随着转速增大,变频器不能很好的输出足够大的力;有时候变频器速度更快,高速运行时,处于弱磁区,我们必须设置相应的参数,以便让变频器适应弱磁环境。 速度与出力,高速或者低速时,两者不可兼得,这里有个数据概念:调速范围,指满足额定转矩出力的最低频率与最高频率的比值。以前一般的VF控制方式调试范围为1:20~1:40,我司产品V/F控制调速范围可以达到1:100,能够满足更多范围的行业应用。在开环矢量时可以达到1:200,闭环矢量时达到1:1000,接近伺服的性能。 变频器V/F控制系统运行时,有两种方式进行转矩的提升: 1、自动转矩提升: 必须在P0.16=0且P4.00=0时,自动转矩提升才有效。其作用为:变频器V/F控制低频运行时,提高输出电压,抵消定子压降以产生足够的转矩,保证电机正常运行。自动转矩提升与变频器设置“空载电流”和静止学习的“定子电阻”有关系,变频器必须作电机参数静止自整定,才能更好的控制电机运行。变频器作自动转矩提升控制电机时,见上图所示输出电压和频率的线性关系,运行中因为负载变化对电压输出作适当的增减,由于响应时间的快慢,所以会出现出力不稳定因素。 2、手动转矩提升 设置P0.16为某一数值时,或者设置P4.00为非零时,手动转矩提升才有效。手动转矩提升只与变频器设置“空载电流”有关系,受电机其他参数设置影响较小。如下图所示,为手动转矩提升曲线图。变频器输出作手动转矩提升,其转矩出力在原来基础上成线性增加,所以出力稳定,不受负载变化的影响,出力稳定。但是转矩提升不益太大,转矩提升的幅度应根据负载情况适当设定,提升过多,在启动过程中将产生较大的电流冲击。 自动转矩提升只能满足一拖一的输出情况,当涉及一台变频器拖动多台电机时,V/F控制时必须采用手动转矩提升,即设置P0.16为非0值。 V/F控制时的有关性能参数调试: PA.02为V/F控制转差补偿增益,设置此参数时,可以参考电机额定转速P9.02来设定参数。该功能有助于变频器在负载波动及重载情况下保持电机转速恒定,即补偿由于负载波动而导致的电机转速增减,但是由于补偿本身的响应时间问题,导致系统出现不稳定因素增多,在系统波动较大的情况下,此功能码设置为0有一定效果。 变频器通过编码器实现闭环控制的原理 变频器带编码器的闭环控制: 变频控制闭环,主要是指速度闭环。 变频电机有需要速度反馈的,在电机启动、加速和减速停止的变速过程中,电机的驱动电流需要与实际转速下电机因发电机效应产生的反电动势相匹配,如果电机驱动电流与反电动势阻抗不匹配,电机驱动力不够转速达不到输出要求,或者因电机负载过大电机没有达到输出速度值,反电动势因与转速成比例而偏弱,这样会引起电机电流徒增,容易烧毁电机线圈或驱动器。速度反馈及时反馈的信息可以计算实际转速并导算反电动势与驱动电流的匹配,从而保护电机和驱动器。 变频频电机的速度闭环反馈,大约有三种模式: 1,霍尔传感器,在电机转径上大部分是三个霍尔传感器,反馈三相位置变化。由于传感器对电机一周的提供信息有限,速度精度低,在低速时很难分辨。 2,所谓无传感器的技术----利用线圈转起来,自感应反电动势。但是在启动到低速过程中反电动势较弱,如果感应电路本底阻抗在,这种微弱的感应被吃掉,低速时实际获得反馈很不稳定。 3,旋转编码器,较高的分辨率(例如每圈1024个脉冲),可获得较高的速度精度,尤其是在启动到低速时精度高。 根据上述描述,可见变频器(尤其是矢量变频)带编码器主要是在低速启动时的效果,可以精细化计算驱动电流,防止电流过小驱动力不够(没有转速),或者因为堵转电机失速,反电动势不够而驱动电流过流,容易烧毁器件或电机。 上述情况在起重启升类电机尤为重要,防止变频器为保护电机失速而溜钩,所以起重启升类变频器必须加装编码器。 注意一下矢量变频的手册内容,一般有编码器反馈的,低速可做到很低。 另外,变频器有的加装了PG卡的位置闭环模式,编码器反馈给具有位置控制功能的变频器(PG卡)做位置闭环控制,或者编码器信号给PLC,PLC给指令变频器减速和制动做位置闭环控制,这时我建议需要用值编码器。 变频器常用的几种控制方 式 Prepared on 22 November 2020 变频器常用的几种控制方式 变频调速技术是现代电力传动技术的重要发展方向,而作为变频调速系统的核心—变频器的性能也越来越成为调速性能优劣的决定因素,除了变频器本身制造工艺的“先天”条件外,对变频器采用什么样的控制方式也是非常重要的。本文从工业实际出发,综述了近年来各种变频器控制方式的特点,并展望了今后的发展方向。 1、变频器简介 变频器的基本结构 变频器是把工频电源(50Hz或60Hz)变换成各种频率的交流电源,以实现电机的变速运行的设备,其中控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆变成交流电。对于如矢量控制变频器这种需要大量运算的变频器来说,有时还需要一个进行转矩计算的CPU 以及一些相应的电路。 变频器的分类 变频器的分类方法有多种,按照主电路工作方式分类,可以分为电压型变频器和电流型变频器;按照开关方式分类,可以分为PAM控制变频器、PWM控制变频器和高载频PWM 控制变频器;按照工作原理分类,可以分为V/f控制变频器、转差频率控制变频器和矢量控制变频器等;按照用途分类,可以分为通用变频器、高性能专用变频器、高频变频器、单相变频器和三相变频器等。 2、变频器中常用的控制方式 非智能控制方式 在交流变频器中使用的非智能控制方式有V/f协调控制、转差频率控制、矢量控制、直接转矩控制等。 (1) V/f控制 V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。 V/f控制变频器结构非常简单,但是这种变频器采用开环控制方式,不能达到较高的控制性能,而且,在低频时,必须进行转矩补偿,以改变低频转矩特性。 (2) 转差频率控制 转差频率控制是一种直接控制转矩的控制方式,它是在V/f控制的基础上,按照知道异步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有对应的输出转矩。这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率和电流进行控制,因此,这是一种闭环控制方式,可以使变频器具有良好的稳定性,并对急速的加减速和负载变动有良好的响应特性。 (3) 矢量控制 矢量控制是通过矢量坐标电路控制电动机定子电流的大小和相位,以达到对电动机在d、q、0坐标轴系中的励磁电流和转矩电流分别进行控制,进而达到控制电动机转矩的目的。通过控制各矢量的作用顺序和时间以及零矢量的作用时间,又可以形成各种PWM波,达到各种不同的控制目的。例如形成开关次数最少的PWM波以减少开关损耗。目前在变频器中实际应用的矢量控制方式主要有基于转差频率控制的矢量控制方式和无速度传感器的矢量控制方式两种。 基于转差频率的矢量控制方式与转差频率控制方式两者的定常特性一致,但是基于转差频率的矢量控制还要经过坐标变换对电动机定子电流的相位进行控制,使之满足一定的条件,以消除转矩电流过渡过程中的波动。因此,基于转差频率的矢量控制方式比转差 https://www.360docs.net/doc/6616982275.html,/m/b/1411607.html 丹佛斯VLT2800系列变频器的闭环速度控制功能 一、概述: 丹佛斯VLT2800系列变频用具有响应时间快、速度控制精度高等特点,通过内部的滑差补偿功能,可以在开环速度控制中将转速误差控制在+/-23rpm之内(4极电机,90~3600rpm)。假如对转速精度有更高的要求,可以采用速度闭环的方式:通过速度传感器反馈信号与给定信号的比较进行PID运算,控制电机的实际转速。通过速度闭环控制,VLT2800系列变频器可将转速误差控制在+/-7.5rpm之内(4极电机,30~3600rpm)。 二、实施方法: 将速度传感器安装于电机轴上,通过对实际转速信号的采集达到精确控制转速的目的。速度传感器一般采用旋转编码器,而旋转编码器根据工作原理、分辨率、电源类型和输出形式的不同又分为很多不同类型,如下表所列。 在此,我们选用增量型、24V电源供电、集电极开路(PNP)输出、分辩率为1024的旋转编码器,按下表方式接线: 一般使用旋转编码器需要判定电机转向和定位控制时需要使用A/B/Z三相信号。在此,我们仅需要A 相信号传感实际转速。 需重新设定的参数见下表(以四极电动机为例,由电位器给定转速信号): 基于S7-200 PLC USS协议通信的速度闭环定位控制系统设 计 时间:2013-11-20 来源:作者: 可以应用于多个自动化控制系统中,大大节约了项目的开发时间和成本,在实际应用中取得了良好的效果。 0 引言 随着电力电子技术以及控制技术的发展,交流变频调速在工业电机拖动领域得到了广泛应用;可编程控制器PLC作为替代继电器的新型控制装置,简单可靠,操作方便、通用灵活、体积小、使用寿命长且功能强大、容易使用、可靠性高,常常被用于现场数据采集和设备的控制;在此,本次设计就是基于S7-200PLC的USS通信方式的速度闭环定位控制。 将现在应用最广泛的PLC和变频器综合起来通过USS协议网络控制实现速度闭环定位控制。PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后 停止运行并锁定。因此,该系统必须具备以下三个主体部分:控制运算部分、执行和反馈部分。控制运算主要由PLC和变频器来完成;执行元件为变频器和电机;反馈部分主要为速度反馈。 S7-200 PLC通过USS协议网络控制Micro-Master MM420变频器,控制电动机的启动、制动停和定位控制,并能够通过PLC读取变频器参数、设置变频器参数。 1.系统设计的总体思路 系统主要由三个部分构成,即可编程逻辑控制器件PLC、变频器和电机。首先通过设置给定输入给PLC,再通过PLC控制变频器,再经由变频器来控制电机,随后将电机的转速反馈给PLC,经比较后输出给变频器从而实现无静差调速。构成闭环系统就要把速度信息反馈给输入。速度的测量可以通过光电编码器和PLC来实现。 速度采集:S7-200具有高速脉冲采集功能,采集频率可以达到30KHz,共有6个高速计数器(HSC0~HSC5)工作模式有12种。在固定时间间隔内采集脉冲差值,通过计算既可以获得电动机的当前转速。 例如:设采样周期为100ms即是每隔100ms采集脉冲一次,光电开关每转发出8个脉冲,那么就可以得到速度为: ATV71的闭环矢量控制的设置与要点 目前变频器在我国的应用已经达到了一个前所未有的程度,人们对采用变频器的好处已经有了深刻的认识,基本上只要有调速电机的场合都会选取变频器作为驱动装置,但调速电机传动的机械装置控制的对象是多种多样的,如速度、压力、位置、温度、流量、张力等,对于每一种对象其产生的机械特性和性能要求都是不一样的。因此要求针对不同的对象、不同机械特性和性能要求选取恰当的变频器及其恰当的控制方式。 对于风机、泵类负载(主要针对变转矩类风机)由于在低速时需要的转矩小,对速度精度要求低,因此一般选用ATV31、ATV61等变频器。对于那些需要恒转矩特性,但在转速精度及动态性能方面要求不高的负载,可选用ATV31、ATV71;对于低速时要求有较硬的机械特性,并要求有一定的调速精度,但在动态性能方面无较高要求的负载,可选用ATV71开环控制;对于某些对调速精度和动态性能方面都有较高要求,以及要求高精度同步运行的负载,可选用ATV71闭环控制。 对于究竟在什么时候选取ATV71闭环控制,可以依据下表中的数据对比用户的性能要求;当然对一些已经成熟的闭环控制应用现在开环就可以满足要求的就依据客户的态度了。 表一ATV71性能 ATV71作为一款高性能的通用变频器,其内置了多种电机控制模式,可以为不同的用户提供灵活多变的选择以满足用户的要求。见表二 下面我就根据ATV71说说闭环矢量控制的设置步骤和设置要点。 首先必须根据用户电机上选配的编码器的类型选取恰当的ATV71编码器接口板卡,目前ATV71提供有三大类7种编码器接口板,它们是: RS422 差分输入的增量型编码器 变频器矢量控制原理知识 矢量控制的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。 基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。 无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。它的基本控制思想是根据输入的电动机的铭牌参数,按照一定的关系式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。 采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器,并需使用厂商指定的变频器专用电动机进行控制,否则难以达到理想的控制效果。目前新型矢量控制通用变频器中已经具备异步电动机参数自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。除了上述的无传感器矢量控制和转矩矢量控制等,可提高异步电动机转矩控制性能的技术外,目前的新技术还包括异步电动机控制常数的调节及与机械系统匹配的适应性控制等,以提高异步电动机应用性能的技术。为了防止异步电动机转速偏差以及在低速区域获得较理想的平滑转速,应用大规模集成电路并采用专用数字式自动电压调整(AVR)控制技术的控制方式,已实用化并取得良好的效果。 闽南师范大学 PLC课程设计 课题:基于PLC模拟量的变频器闭环调速控制 姓名: 学号: 1205000529 系别:物理与信息工程学院 专业:电气工程及其自动化 年级: 12级电气1班 指导教师:洪清辉 2015年5月18日 目录 1 引言 (3) 2 系统设计 (3) 2.1 设计目的 (3) 2.2 设计要求 (3) 2.3 设计思路 (3) 2.4 系统硬件配置及组成原理 (4) 2.5变频器 (7) 2.5.1变频器主要功能 (7) 2.5.2 变频器平面图 (7) 2.6 同轴编码器 (7) 3 硬件接线图 (8) 4 软件设计 (8) 4.1 软件流程图 (8) 4.2梯形图 (8) 5 应用扩展------基于PLC模拟量的矿井通风系统 (10) 5.1设计内容 (10) 5.2设计实现目标 (10) 5.3控制系统设计 (11) 5.3.1控制程序流程图设计 (11) 5.3.1控制程序设计思路 (11) 6心得体会 (11) 7 参考文献 (12) 摘要 一种基于FX2NPLC控制的变频调速的闭环控制系统及其在液位控制中的应用,在电机速度闭环控制中,由同轴编码器对电机测速,经PLC内部A/D转换后与给定值比较再由PID运算控制得出的值经D/A转换后输出给变频器,从而闭环控制电机的转速。 关键词:plc 模拟量变频器 1 引言 随着变频调速技术的应用日益广泛,应用水平的不断提高,对变频调速控制系统的精度要求也越来越高。目前,许多变频调速装置属于开环控制方式,不能满足有较高精度的控制要求。为提高开环变频调速器控制精度,本系统采用有编码器速度检测的、由高性能FX2NPLC 调节控制的闭环系统。 2 系统设计 2.1 设计目的 1.利用可编程控制器及其模拟量模块,通过对变频器的控制,实现电机的闭环调速。 2.了解可编程控制器在实际工厂生产中的应用及可编程控制器的编程方法。 2.2 设计要求 电机的实际转速在较快的时间内接近给定目标转速,并且能够稳定运行。当改变给定速度时,电机能快速响应达到接近给定值。 2.3 设计思路 变频器控制电机,电机上同轴连旋转编码器。编码器根据电机的转速变化而输出电压信号Vil 反馈到PLC模拟量模块(Fx2n-3A)的电压输入端,在PLC 内部给定量经过运算处理后,通过PLC模拟量模块的电压输出端输出一路DC0~+10V电压信号Vout来控制变频器的输出,达到闭环控制的目的。 运算方案一: 采用数学运算,当反馈值小于给定值时,让控制信号Vout加适当值。同理,当反馈量大于给定值时,用软件给控制信号减适当值。 变频器的控制方式有哪些 变频器(Variable-frequency Drive,VFD)是应用变频技术与微电子技术,通过改变电机工作电源频率方式来控制交流电动机的电力控制设备。变频器靠内部IGBT的开断来调整输出电源的电压和频率,根据电机的实际需要来提供其所需要的电源电压,进而达到节能、调速的目的,另外,变频器还有很多的保护功能,如过流、过压、过载保护等等。随着工业自动化程度的不断提高,变频器也得到了非常广泛的应用。那么,常见的变频器有哪些种类,它们的控制方法又是什么? 变频器的种类从控制方式来讲,现在市场上常见的有V/F控制变频器、矢量控制变频器两种。从电压角度来讲,有低压变频器、高压变频器两种。从电源角度来讲,有单相变频器、三相变频器的区分。从适用场合来分,有通用变频器、风机水泵专用型变频器、注塑机专用型变频器、拉丝机专用变频器、电梯专用变频器、球磨机专用变频器等等。 变频器常用的控制方式1、非智能控制方式在交流变频器中使用的非智能控制方式有V/f 协调控制、转差频率控制、矢量控制、直接转矩控制等。 (1)V/f正弦脉宽调制(SPWM)控制方式 V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。V/f控制变频器结构非常简单,但是这种变频器采用开环控制方式,不能达到较高的控制性能,而且,在低频时,必须进行转矩补偿,以改变低频转矩特性。 (2)转差频率控制 转差频率控制是一种直接控制转矩的控制方式,它是在V/f控制的基础上,按照知道异步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有 对应的输出转矩。这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率和电流进行控制,因此,这是一种闭环控制方式,可以使变频器具有良好的稳 ***************************************** 基于PLC模拟量方式的变频闭环 调速控制系统设计 学生学号:********** 学生姓名:****** 专业班级:********* 指导教师:****** 职称:**** 起止日期:*********~********* ********* ****************** 课程设计任务书 一、设计题目:基于PLC模拟量方式的变频闭环调速控制系统设计 二、设计目的: 1.掌握S7-200 SMART PLC数据转换指令的使用及编程; 2.掌握S7-200 SMART PLC模拟量控制MM440变频器进行闭环调速的接线、调试、操作; 三、设计任务及要求: 1. 设计任务: 用S7-200 SMART PLC控制西门子MM440变频器,PLC根据模拟量输入端的给定值和过程变量值,经过程序运算后由模拟量输出端输出值控制变频器运行。 2. 设计要求: 2.1电机运行速度超出设定值时开始减速; 2.2电机运行速度低于设定值时开始加速; 四、设计时间及进度安排: 设计时间共三周,具体安排如下表: 目录 第1章绪论 (1) 第2章系统设计 (2) 2.1 设计思路 (2) 2.2 系统硬件配置及组成原理 (3) 2.3 变频器 (4) 第3章MM440变频器简介 (5) 3.1 MM440变频器 (5) 3.2 MM440变频器的组成 (5) 3.3 主电路工作原理 (6) 第4章西门子S7-200 (7) 4.1 S7-200的介绍 (7) 4.2 S7-200SMART系列PLC结构 (8) 4.3 S7-200 SMART的特点 (8) 4.4 CPU单元设计 (9) 第5章PLC PID变频调速系统结构 (10) 5.1 系统结构控制模型 (10) 5.2 PID调节 (11) 总结 (17) 参考文献 (18) 漳州师范学院 课 程 设 计 报 告 课题名称:PLC的变频闭环调速及其应用 姓名:林铭泰 学号:070505116 班级:07电气1班 指导老师:洪清辉 2010-06-20 1 引言 (3) 2 系统设计 (3) 2.1 设计目的 (3) 2.2 设计要求 (3) 2.3 硬件接线图 (6) 3 各硬件模块简介 (6) 3.1 变频器 (6) 3.1.1 变频器主要功能 (6) 3.1.2 变频器平面图 (7) 4 软件设计 (8) 4.1 A/D输入模块程序 (8) 4.2 D/A输出模块程序 (8) 4.3 偏移参数设定 (8) 5 系统测试 (8) 5.1 测试方法 (8) 5.2 测试中遇到的问题 (9) 6 应用扩展 (10) 基于PLC在矿井提升机中的调速控制系统 (10) 6.1 控制要求 (10) 6.2 本设计控制结构 (10) 6.3 设计说明 (11) 7 结束语 (12) 8 参考文献 (12) 9 附录 (13) 1 引言 随着变频调速技术的应用日益广泛,应用水平的不断提高,对变频调速控制系统的精度要求也越来越高。目前,许多变频调速装置属于开环控制方式,不能满足有较高精度的控制要求。为提高开环变频调速器控制精度,本系统采用有编码器速度检测的、由高性能FX2NPLC 调节控制的闭环系统。 2 系统设计 2.1 设计目的 1.利用可编程控制器及其模拟量模块,通过对变频器的控制,实现电机的闭环调速。 2.了解可编程控制器在实际工厂生产中的应用及可编程控制器的编程方法。 2.2 设计要求 电机的实际转速在较快的时间内接近给定目标转速,并且能够稳定运行。当改变给定速度时,电机能快速响应达到接近给定值。 系统简介 1.1FXON一3A简介 可编程控制器(PLC)原是为了开关量的控制而设计的。但是,在一个复杂的控制系统中,控制任务多种多样,而且随着电子技术的发展,新型过程控制计算机的不断涌现,在STD总线计算机、可编程调节器、集散型控制系统的基础上,PLC的模拟量控制越来越得到广泛的应用。模拟量不同于开关量,它在时间上、数值上都是连续变化的。 为了满足模拟量控制系统的控制要求,几乎所有的可编程控制器生产厂家都开发了模拟量控制功能。采取的方法是在软件上为PLC增加功能指令,在硬件上为PLC设计各种各样的模拟量控制模块。不同厂家的可编程控制器,开发了不同的模拟量专用模块,三菱FXON一3A模块就是其中的一种。 FXoN是日本三菱公司设计的产品,该系列是依据FX2系列的固定及可扩展性概念,在软硬件两方面兼备微程序装置所必要的性能、功能。FX ON一3A是可编程控制器的模拟量特殊功能模块。该模块具有2路模拟量输入通道和1路模拟量输出通道。其输入通道数字分辨率为8位,A/D的转换时间为100s,在模拟与数字信号之间采用光电隔离,适用于FX1N、FX2N、FX2NC子系列。在A/D转换中,输入通道接收模拟信号后转换成数字信号;在D /A转换中,输出通道取数字信号并输出等同的模拟信号。它占用FXON扩展总线的8点输入/输出,8点可定为输入或输出。对于FXON一3A模块,用户可连接电压或电流输入/输出,并有3种信号形式可供选择:0~10 VDC(分辨率为40 mV),0~5 VDC(分辨率为 三菱FR-A700变频器在某工厂铝连铸连轧机上的应用 引言 三菱FR-A700变频器闭环矢量控制方式,主要用于高精度的速度控制、转矩控制、简单伺 服控制等对控制性能要求严格的场合。 在该方式下采用的速度传感器一般是旋转编码器, 并 安装在被控电动机的轴端。通过对铝连铸连轧机上下辊电机的速度和转矩控制来实现铝板的 高精度轧制,并能实现系统的稳定性和可靠性。 1、项目背景 某工厂铝连铸连轧机的主要工作是将经原炉熔炼、 静止炉精炼后的高温铝液在快速冷却的同 时轧制成铝板,最终通过卷取机卷成铝卷。该设备主要有主轧机、 铝液位控制装置、钛丝进 给、铸嘴小车、石墨喷涂及行走、平动液压剪、卷取机、卸卷车等,如图 1所示。 轧机传动控制系统的硬件设计 2.1控制原理 速度和转矩控制是轧机上下辊传动电机的核心控制原理, 其示意如图2所示。M1为主传动, 采用双闭环速度/转矩矢量控制方式,速度环为 V 速度给定和PG 编码器返回的实际速度的 控制回路,其输出值再乘以一定的比值就是 M2的转矩控制输入值。转矩环为内部闭环。 M2为从传动,速度闭环的输出值并不直接控制转矩,而只是限定 M2转矩的幅度,以最终 保证轧机上下两辊电机在线速度上的紧密性和同步性, M2转矩的输入值是来自主传动 M1 的转矩值,以决定 M2的转矩输出值。 1920mm 、板宽1400mm 、板厚6?8mm ,轧机上下辊电机 90kW 。 针对铸轧机成套电控系统的工艺特点 (长期稳定连续生产、 选择高性能、高可靠性的控制元器件是满足控制要求的关键。 制,上辊采用转矩控制,且都采用带编码器的变频电机。 一旦事故停车将造成严重损失), 现要 求:轧机下辊采用速度控 该轧机的系统技术性能参数:最高轧制速度 2.0m/min 、最大卷重 5000kg 、卷径 $ 610 苏州市职业大学实验报告 院系电子信息工程系班级 10电气(4)姓名齐国昀学号 107301427 实验名称闭环变频调速系统实验日期 2012 年4 月24 日 一、实验目的 1、学习闭环变频调速系统的构成方法。 2、比较开环变频调速系统和闭环变频调速系统的差别。 二、接线图 三、实验内容: 1、开环加载实验。按接线图接线,将作为发电机负载的阻值调至最大。依次合上变频器、触摸屏和PLC的电源开关。P0700设置为1,P1000设置为1,P1080设置为0。电动机空载(断开K),按按钮起 第 1 页共 2 页指导教师签名 苏州市职业大学实验报告 院系电子信息工程系班级 10电气(4)姓名齐国昀学号 107301427 实验名称闭环变频调速系统实验日期 2012 年4 月24 日 动变频器,用变频器按键调节频率,使电动机平均转速至800r/min,将数据记入表1中。给电动机加负载(合上K),将数据记入表1中;再逐渐调高频率,使电动机平均转速回至800r/min,将数据记入表1中。结束按变频器按钮停止电动机。 表1 频率(Hz)转速(r/min) 1 2 3 平均值 1 2 3 平均值 )27.8 27.8 27.8 27.8 805.6 791.7 819.4 805.56 空载(f 1 )27.8 27.8 27.8 27.8 763.9 777.8 791.7 777.8 负载(f 1 )29.8 29.8 29.8 29.8 819.4 805.6 819.4 814.8 负载(f 2 2、闭环加载实验。接线和负载的阻值不变。P1000设置为2,其余参数不变。触摸屏屏上选闭环,电动机空载(断开K),设定转速格中键入800r/min,P格中键入5~8的数字,其余格中键入0。按按钮起动变频器,待电动机转速稳定后,将数据记入表2中。给电动机加负载(合上K),待电动机转速稳定后,将数据记入表2中。结束按变频器按钮停止电动机。最后,按PLC、触摸屏、变频器的顺序关闭各自的电源开关。 表2 频率(Hz)转速(r/min) 1 2 3 平均值 1 2 3 平均值 )27.64 28.6 28.5 28.24 791.7 805.6 833.3 812.3 空载(f 1 )28.5 29.7 30.6 29.6 791.7 805.6 833.3 812.3 负载(f 2 四、实验小结 本次实验是最后一次实验,也是我们涉及的功能最多的一次。这次实验我学到了变频调速的构成方法,知道了开环变频调速系统与闭环变频调速系统的本质的差别!这次实验也让我学习到了更多的东西! 第 2 页共 2 页指导教师签名 矢量控制概念:矢量控制目的是设法将交流电机等效为直流电机,从而获得较高的调速性能。矢量控制方法就是将交流三相异步电机定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,这样即可等效于直流电机。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。。矢量控制理论模型如下图 矢量控制特点:变频器矢量控制,按照是否需要转速反馈环节,一般分为无反馈矢量控制和有反馈矢量控制。 1、无反馈矢量控制。无反馈矢量控制方式优点是:a)、使用方便,用户不需要增加任何附加器件。b)、机械特性较硬。机械特性由于V/F控制方式,且不会发生电机磁路饱和问题,调试方便(个人观点,请大家批评指正)缺点是:调速范围和动态响应能力不及有反馈控制方式; 2、有反馈矢量控制方式。有反馈矢量控制方式的主要优点是: a)、调速性能优于无反馈矢量控制方式及V/F控制。缺点:需要在电机上安装测速装置(大多为旋转编码器),电机变频改造比较麻烦,成本也高。 故有反馈矢量控制一般应用场合为:a)、要求有较大调速范围的场合(如:具有铣、磨功能的龙门刨床); b)、对动态响应性能要求较高的场合;c)、对安全运行要求较高场合。 矢量控制的适用范围:a)、矢量控制只能用于一台变频器控制一台电机。当一台变频器控制多台电机时,矢量控制无效; b)、电机容量与变频器要求配置的电机容量之间,最多只能相差一个档次。(如:变频器要求配置电机容量为7.5KW,那么实际电机最小容量为5.5KW,对于3.7kw电机就不行了); 变频调速系统概述(经典) 摘要 20世纪90年代以来,机电传动控制领域面貌焕然一新。各种类型的鼠笼式异步电动机压频比恒定的变压变频调速系统、同步电动机变频调速系统,交流电动机矢量控制系统、鼠笼式异步电动机直接转矩控制系统等,在工业生产的各个领域中都得到了广泛的应用,覆盖了机电传动调速控制的各个方面。交流调速技术的应用为工农业生产及节省电能方面带来了巨大的经济和社会效益。现在,交流调速系统已在逐步地全面取代直流调速系统。目前在交流调速系统中,变频调速系统应用最多、最广泛,变频调速技术及其装置仍是21世纪的主流技术和主流产品。现代交流调速系统由交流电动机、电力电子功率变换器、控制器和电量检测器等四大部分组成。电力电子功率变换器与控制器及电量检测器集于一体,称为变频器。 关键词:变频调速系统领域应用实例变频器选择 一、定义变频调速系统主要是由变频器、电动机和工作机械等装置组成的机电系统。电 力拖动的任务是使电动机实现由电能向机械能的转换,完成工作机械启动、运转、调速、制动作业的要求。变频调速系统也就是由电动机带动机械设备以可以自由调节的速度进行旋转的运动系统。 二、变频调速系统变频系统有以下及几种:同步电动机调速系统,根据频率控制 方式的不同,分为:1.他控式变频调速系统与异步电动机变压变频调速一样,用独立的变压变频装置给同步电动机供电的系统称作他控变频调速系统。下图是由交-直-交电流型负载换流变压变频器供电的同步电动机调速系统 2.自控式变频调速系统 用电动机轴上所带的转子位置检测器来控制变频装置的逆变器换流,从而改变同步电动机的供电频率,因调速时定子绕组供电频率受电动机转速的自动控制,故称为自控式变频调速系统。 异步电动机调速系统:1.恒压频比控制交流调速系统对于鼠笼式异步电动机的变压变频调速,必须同时改变供电电源的电压和频率。现有的交流供电电源都是恒压恒频的,必须通过变频装置(即Variable Voltage Frequency,简称VVVF装置),才能获得变压变频的电源。异 变频器矢量控制 变频器的V/F控制与矢量控制 U/f=C的正弦脉宽调制(SPWM)控制方式 其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。 矢量控制(VC)方式 矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。矢量控制方法的提出具有划时代的意 义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。 V/F控制与矢量都是恒转矩控制。U/F相对转矩可能变化大一些。而矢量是根据需要的转矩来调节的,相对不好控制一些。对普通用途。两者一样 1、矢量控制方式—— 矢量控制,最简单的说,就是将交流电机调速通过一系列等效变换,等效成直流电机的调速特性,就这么简单,至于深入了解,那就得深入了解变频器的数学模型,电机学等学科。 矢量控制原理是模仿直流电动机的控制原理,根据异步电动机的动态数学模型,利用一系列坐标变换把定子电流矢量分解为励磁分量和转矩分量,对电机的转矩电流分量和励磁分量分别进行控制。 在转子磁场定向后实现磁场和转矩的解耦,从而达到控制异步电动机转矩的目的,使异步电机得到接近他励直流电机的控制性能。 具体做法是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并 目录 目录 .............................................................................................................................................. 第一章系统的功能设计分析和总体思路....................................................................................... 1.1 概述 ................................................................................................. 错误!未定义书签。 1.2 系统功能设计分析 ........................................................................................................... 1.3 系统设计的总体思路 ....................................................................................................... 第二章PLC和变频器的型号选择 (5) 2.1PLC的型号选择............................................................................................................ 2.2变频器的选择和参数设置 ............................................................................................ 2.2.1 变频器的选择 .......................................................................................................... 2.2.2 变频调速原理 ........................................................................................................ 2.2.3 变频器的工作原理 ................................................................................................ 2.2.4 变频器的快速设置 ................................................................................................ 第三章硬件设计以及PLC编程 ............................................................................................... 3.1开环控制设计及PLC编程 ........................................................................................... 3.1.1 硬件设计 .................................................................................................................. 3.1.2 PLC软件编程 ........................................................................................................ 3.2 闭环控制设计 ................................................................................................................... 3.2.1 硬件和速度反馈设计 ............................................................................................ 3.2.3闭环的程序设计以及源程序............................................................................. 第四章实验调试和数据分析 ...................................................................................................... 4.1 PID 参数整定................................................................................................................... 4.2 运行结果 (25) 第五章总结和体会 .................................................................................................................... 第六章附录 ................................................................................................................................ 6.1 变频器内部原理框图 ....................................................................................................... 第七章参考文献 ........................................................................................................................变频器的VF控制与矢量控制
变频器矢量控制与VF控制区别
变频器通过编码器实现闭环控制的原理
变频器常用的几种控制方式
变频器的闭环速度控制功能
何垠泉-ATV71的闭环矢量控制的设置与要点
变频器矢量控制原理
基于PLC模拟量的变频器闭环调速控制
变频器的控制方式有哪些
基于PLC模拟量方式变频闭环调速控制系统设计
基于PLC模拟量的变频器闭环调速控制
三菱FR A700变频器闭环矢量控制方式的学习
闭环变频调速系统
变频器矢量控制与VF控制
变频调速系统概述
变频器矢量控制讲课讲稿
基于PLC控制的变频器调速系统