G1E6子模块说明及速查表
第16章 110kV输电线路1E6模块杆塔基础通用设计
1E6-SJ1子模块
16.1 1E6-SJ1子模块
(1)概述
本模块为对应国网通用设计杆塔1E6模块的SJ1塔型,转角适用范围为0°~20°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有10个基础。
(2)基础根开
1E6-SJ1铁塔的根开尺寸表16.1-1
(3)基础作用力
1E6-SJ1铁塔的基础作用力见表16.1-2(kN)
呼高(m)Tmax Tx Ty Nmax Nx Ny 15728.66 77.89 81.67 823.99 89.08 89.62 18742.15 78.72 82.06 840.32 90.01 90.48 21750.73 78.90 81.90 855.47 31.21 91.63 24759.01 79.87 82.59 866.51 91.37 91.75
(4)基础工程量速查表
呼高(m)
基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格
(Q235)正面根开侧面根开正面根开侧面根开
15 4728 4728 280 280 4M45 18 5332 5332 280 280 4M45 21 5936 5936 280 280 4M45 24 6540 6540 280 280 4M45
表16.1-3 1E6-SJ1-15~24基础工程量速查表:
序号
地质条件底板宽度
(不含垫层)
(m)
基础埋深
(含垫层)
(m)
1E6-SJ1-15~24
土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3)
1 粉土稍密,粘土软塑90 10 1.5 4.4 4.1 421.3 4238.6 50.5 8.53
2 粉土稍密,粘土软塑90 10
3 4.0 4.2 421.3 3814.5 43.78 7.16
3 粘土,中等塑性100 15 2 4.0 4.0 421.3 3748.
4 43.27 7.16
4 粘土,中等塑性100 1
5 3 4.0 3.7 421.3 3455.0 42.5 7.16
5 粘土,中等塑性100 15 无 4.0 3.
6 421.3 3309.8 30.32 5.91
6 粘土,可塑120 20 2 3.6 3.9 421.3 3276.2 30.0
7 5.91
7 粘土,可塑120 20 3 3.6 3.6 421.3 2978.0 29.3 5.91
8 粘土,可塑120 20 无 3.6 3.5 421.3 2948.3 29.04 5.91
9 坚土,硬塑120~140 20 3 3.6 3.5 421.3 2948.3 29.04 5.91
10 坚土,硬塑120~140 20 无 3.6 3.4 421.3 2912.5 28.79 5.91
1E6-SJ2子模块16.2 1E6-SJ2子模块
(1)概述
本模块为对应国网通用设计杆塔1E6模块的SJ2塔型,转角适用范围为20°~40°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有20个基础,其中转角塔上拔基础10个,转角塔下压基础10个。
(2)基础根开
1E6-SJ2铁塔的根开尺寸表16.2-1
(3)基础作用力
1E6-SJ2铁塔的基础作用力见表16.2-2(kN)
呼高(m)Tmax Tx Ty Nmax Nx Ny 15975.52 111.07 117.15 1068.23 130.83 117.13 18994.66 112.82 119.00 1086.64 131.57 120.61 211009.74 112.97 117.75 1101.38 130.49 119.75 241003.54 111.87 116.20 1131.83 132.62 122.88
(4)基础工程量速查表
呼高(m)
基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格
(Q235)正面根开侧面根开正面根开侧面根开
15 5008 5008 280 280 4M52 18 5652 5652 280 280 4M52 21 6296 6296 280 280 4M52 24 6940 6940 280 280 4M52
表16.2-3 1E6-SJ2-15~24基础工程量速查表:
序号
地质条件底板宽度
(不含垫层)
(m)
基础埋深
(含垫层)
(m)
1E6-SJ2-15~24
土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3)
1 粉土稍密,粘土软塑90 10 1.5 4.6/4.
2 4.9/4.0 601.6 4664.6 57.92 8.56
2 粉土稍密,粘土软塑90 10
3 4.6/4.2 4.3/3.5 601.6 4227.0 55.52 8.56
3 粘土,中等塑性100 15 2 4.6/4.2 4.2/3.5 601.6 4199.8 55.32 8.56
4 粘土,中等塑性100 1
5 3 4.6/4.2 3.9/3.2 601.
6 3965.
7 54.12 8.56
5 粘土,中等塑性100 15 无 4.2/3.8 4.1/3.
6 601.6 3729.2 44.64 7.18
6 粘土,可塑120 20 2 4.2/4.2 4.1/3.1 601.6 3914.4 50.64 7.84
7 粘土,可塑120 20 3 4.2/3.8 3.8/3.2 601.6 3485.3 43.24 7.18
8 粘土,可塑120 20 无 3.8/3.8 4.0/3.2 601.6 3438.3 36.64 6.52
9 坚土,硬塑120~140 20 3 4.6/4.2 4.9/4.0 601.6 3451.1 57.92 8.56
10 坚土,硬塑120~140 20 无 4.6/4.2 4.3/3.5 601.6 3401.7 55.52 8.56
1E6-SJ3子模块16.3 1E6-SJ3子模块
(1)概述
本模块为对应国网通用设计杆塔1E6模块的SJ3塔型,转角适用范围为40°~60°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有20个基础,其中转角塔上拔基础10个,转角塔下压基础10个。
(2)基础根开
1E6-SJ3铁塔的根开尺寸表16.3-1
(3)基础作用力
1E6-SJ3铁塔的基础作用力见表16.3-2(kN)
呼高(m)Tmax Tx Ty Nmax Nx Ny 151182.12 144.49 150.99 1276.47 169.81 147.57 181201.09 145.94 151.69 1297.80 169.79 150.14 211219.10 147.41 152.56 1311.68 169.45 151.85 241232.71 148.48 153.14 1323.94 169.30 153.36
(4)基础工程量速查表
呼高(m)
基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格
(Q235)正面根开侧面根开正面根开侧面根开
15 5405 5405 320 320 4M60 18 6120 6120 320 320 4M60 21 6836 6836 320 320 4M60 24 7550 7550 320 320 4M60
表16.3-3 1E6-SJ3-15~24基础工程量速查表:
序号
地质条件底板宽度
(不含垫层)
(m)
基础埋深
(含垫层)
(m)
1E6-SJ3-15~24
土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3)
1 粉土稍密,粘土软塑90 10 1.5 5.0/4.6 5.1/3.0 923.
2 5356.
3 6
4 10.06
2 粉土稍密,粘土软塑90 10
3 5.0/4.2 4.6/3.0 923.2 4829.3 59.12 9.34
3 粘土,中等塑性100 15 2 4.6/4.2 4.9/3.2 923.2 4855.1 56.12 8.56
4 粘土,中等塑性100 1
5 3 4.6/4.2 4.6/2.9 923.2 4568.9 54.92 8.56
5 粘土,中等塑性100 15 无 4.6/4.2 4.3/2.9 923.2 4487.3 54.32 8.56
6 粘土,可塑120 20 2 4.6/3.8 4.3/3.2 923.2 4274.3 47.92 7.9
7 粘土,可塑120 20 3 4.6/3.8 4.0/2.9 923.2 3986.0 46.72 7.9
8 粘土,可塑120 20 无 4.6/3.8 3.8/2.9 923.2 3937.0 46.32 7.9
9 坚土,硬塑120~140 20 3 4.6/3.8 3.9/2.8 923.2 3952.5 46.32 7.9
10 坚土,硬塑120~140 20 无 4.2/3.8 4.1/2.8 923.2 3954.8 43.04 7.18
1E6-SJ4子模块
16.4 1E6-SJ4子模块
(1)概述
本模块为对应国网通用设计杆塔1E6模块的SJ4塔型,转角适用范围为60°~90°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有20个基础,其中转角塔上拔基础10个,转角塔下压基础10个。
(2)基础根开
1E6-SJ4铁塔的根开尺寸表16.4-1
(3)基础作用力
1E6-SJ4铁塔的基础作用力见表16.4-2(kN)
呼高(m)Tmax Tx Ty Nmax Nx Ny 151441.89 198.99 177.11 1581.61 217.14 194.01 181463.83 199.26 179.92 1603.71 216.96 196.51 211474.72 198.36 180.79 1629.57 218.65 200.08 241489.02 198.82 182.90 1643.96 218.25 201.42
(4)基础工程量速查表
呼高(m)
基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格
(Q235)正面根开侧面根开正面根开侧面根开
15 5641 5641 340 340 4M64 18 6377 6377 340 340 4M64 21 7114 7114 340 340 4M64 24 7850 7850 340 340 4M64
表16.4-3 1E6-SJ4-15~24基础工程量速查表:
序号
地质条件底板宽度
(不含垫层)
(m)
基础埋深
(含垫层)
(m)
1E6-SJ4-15~24
土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3)
1 粉土稍密,粘土软塑90 10 1.5 5.2/4.8 5.7/2.8 1091.
2 6353.9 75.91 10.86
2 粉土稍密,粘土软塑90 10
3 5.2/4.
4 5.1/2.7 1091.2 5695.9 70.02 10.11
3 粘土,中等塑性100 15 2 5.2/4.
4 4.9/2.8 1091.2 5478.9 69.73 10.11
4 粘土,中等塑性100 1
5 3 5.2/4.4 4.6/2.
6 1091.2 5330.4 68.29 10.11
5 粘土,中等塑性100 15 无 4.8/4.4 4.7/2.
6 1091.2 5103.9 64.38 9.29
6 粘土,可塑120 20 2 4.8/4.4 4.7/2.5 1091.2 5130.
7 64.1 9.29
7 粘土,可塑120 20 3 4.8/4.4 4.4/2.4 1091.2 4979.8 62.95 9.29
8 粘土,可塑120 20 无 4.4/4.4 4.5/2.4 1091.2 4783.7 59.37 8.54
9 坚土,硬塑120~140 20 3 4.8/4.0 4.3/2.6 1091.2 4720.8 55.7 8.6
10 坚土,硬塑120~140 20 无 4.4/4.0 4.4/2.6 1091.2 4514.2 52.12 7.85
1E6-SDJ子模块
16.5 1E6-SDJ子模块
(1)概述
本模块为对应国网通用设计杆塔1E6模块的SDJ塔型,转角适用范围为0°~60°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有20个基础,其中转角塔上拔基础10个,转角塔下压基础10个。
(2)基础根开
1E6-SDJ铁塔的根开尺寸表16.5-1
(3)基础作用力
1E6-SDJ铁塔的基础作用力见表16.5-2(kN)
呼高(m)Tmax Tx Ty Nmax Nx Ny
15 1536.93 166.56 201.04 1701.54 221.22 180.19
18 1571.41 169.57 200.08 1746.05 222.58 185.77
21 1602.23 173.25 200.72 1778.70 222.14 188.86
24 1623.78 175.51 200.39 1810.24 222.75 192.3 (4)基础工程量速查表
呼高(m)
基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格
(35#)
正面根开侧面根开正面根开侧面根开
15 5723 5723 340 340 4M64 18 6432 6432 340 340 4M64 21 7141 7141 340 340 4M64 24 7850 7850 340 340 4M64
表16.5-3 1E6-SDJ-15~24基础工程量速查表:
序号
地质条件底板宽度
(不含垫层)
(m)
基础埋深
(含垫层)
(m)
1E6-SDJ-15~24
土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3)
1 粉土稍密,粘土软塑90 10 1.5 5.2/4.8 6.1/3.0 1091.
2 6572.4 77.64 10.86
2 粉土稍密,粘土软塑90 10
3 5.2/4.8 5.5/2.5 1091.2 6240.8 74.47 10.86
3 粘土,中等塑性100 15 2 5.2/4.8 5.2/2.6 1091.2 5974.8 73.9 10.86
4 粘土,中等塑性100 1
5 3 5.2/4.4 4.9/2.8 1091.2 5657.
6 69.73 10.11
5 粘土,中等塑性100 15 无 4.8/4.4 4.9/2.8 1091.2 5384.4 65.54 9.29
6 粘土,可塑120 20 2 5.2/4.4 4.6/2.
7 1091.2 5387.6 68.5
8 10.11
7 粘土,可塑120 20 3 5.2/4.4 4.3/2.5 1091.2 5239.9 67.14 10.11
8 粘土,可塑120 20 无 4.4/4.4 4.8/2.5 1091.2 5065.2 60.52 8.54
9 坚土,硬塑120~140 20 3 5.2/4.0 4.1/2.7 1091.2 4943.1 59.61 9.42
10 坚土,硬塑120~140 20 无 4.4/4.0 4.6/2.7 1091.2 4594.6 52.98 7.85
wer4.2软件巡线模块库说明表
2016WER 4.2软件巡线模块库说明表 “巡线模块库”是专门针对使用地面灰度巡线的小车设计的用于巡线的模块库。使用该模块时要求地面灰度成排安装在小车的前方,灰度数量可以是5个或者7个。对于初学者建议先学习本书“6.4灰度传感器巡线原理”部分。 *初始化* 初始化模块是巡线机器人的配置模块,它定义了机器人上电机的接口配置和输出功率及转向、灰度传感器的接口配置、机器人巡线环境、灰度传感器阀值的取值系数等。
①闭环电机:如果你使用的是速度闭环的电机需要勾选该项;如果是普通电机请勿勾选该项,否则您的电机转动时可能会一直保持最高速度。 ②(马达)通道:分为2个,对应机器人的左右电机分别接在哪个DC口上。 ③功率:电机的实际输出速度是程序中的速度值乘以该功率值。如果某一电机正转时机器人是后退的,可以把功率设置为负数,这样以后再设置电机速度时就不用考虑转向问题了。 ④地面灰度数量:如果您的机器人是使用7个灰度传感器巡线的,请选择“7灰度配置”;如果您的机器人是使用5个灰度传感器巡线的,请选择“5灰度配置”;如果您的机器人既不是使用7个灰度传感器巡线也不是使用5个灰度传感器巡线,那么这个“巡线模块库”不可用,您需要自己编写巡线程序。 ⑤ (灰度)通道:定义机器人的灰度传感器分别是接在哪个I/O口上。 ⑥场地类型:如果场地上的线条是黑色的(场地白色)请选择“黑线”;如果场地上的线条是白色的(场地黑色)请选择“白线”。这里的黑色和白色是针对灰度传感器说的,比如玻璃是无色的,而灰度传感器会认为它是黑色。 ⑦是否打开DO:该功能决定是否将所有DO口都打开,如果选择“是”,在程序运行到该模块时,所有灰度传感器都会上电。 ⑧阀值偏移:我们取阀值(临界值)时一般都是“(小值+大值)*0.5”,在一些特殊情况下您可能需要让这个阀值偏向小值,这时只需要把这个“0.5”改小即可。需要注意的是这个值不能太小,如“(2+8)*0.5”算得阀值为“5”,如果您把“0.5”调整到“0.1”时,他就没有意义了,因为此时的阀值比最小值还要小。 注意:初始化模块是机器人的配置文件,无论是巡线程序还是采集传感器阀值,第一步都要有这个初始化模块。初始化模块一般在程序的最开始部分,但是如果机器人运行过程中场地类型发生了变化,如由白底黑线变成了黑底白线,则需要增加一个初始化模块。 初始化模块是把必要机器人配置信息保存在了程序的全局变量中。 *环境采集*
D(1D3、1D5)模块说明及速查表
第12章 110kV输电线路1D3模块杆塔基础通用设计 1D3-SZ1子模块 12、1 1D3-SZ1子模块 (1)概述 本模块为对应国网通用设计杆塔1D3模块得SZ1塔型,转角适用范围为0°;适用得地基土为粉土、粘土(包括湿陷性黄土与膨胀土)得平地、丘陵与山地,共有10个基础。 (2)基础根开 1D3-SZ1铁塔得根开尺寸表12、1-1 表12、1-1 11D3-SZ1根开尺寸表(3)基础所用力 1D3-SZ1铁塔得基础作用力见表12、1-2
1D3-SZ2子模块 12、 2 1D3-SZ2子模块 (1)概 述 本模块为对应国网通用设计杆塔1D3模块得SZ2塔型,转角适用范围为 0°;适 用得地基土为粉土、粘土(包括湿陷性 黄土与膨胀土)得平地、丘陵与山地,共有10个基础。 (2)基础根开 1D3-SZ2铁塔得根开尺寸表12、2-1 表12、2-1 1D3-SZ2(15-30)根开尺寸表 (3)基础所用力 1D3-SZ2铁塔得基础作用力见表12、4-2
1D3-SZ3子模块 12、3 1D3-SZ 3子模块 (1)概 述 本 模块为对应国网通用设计杆塔1D3模块得SZ3塔型,转角适用范围为0°;适用得地基土为粉土、粘土(包括湿陷性黄土与膨胀土)得平地、丘陵与山地,共有20个基础。 (2)基础根开 1D3-SZ3铁塔得根开尺寸表12、4、3-1 表12、3-1 1D3-SZ3根开尺寸表 (3)基础所用力 1D3-SZ3铁塔得基础作用力见表12、3-2
表
1D3-SZK 子模块 12、4 1D3-SZK 子模块 (1)概 述 本模块为对应国网通用设计杆塔1D3模块得SZK 塔型,转角适用范围为0°;适用得地基土为粉土、粘土(包括湿陷性黄土与膨胀土)得平地、丘陵与山地,共有10个基础。 (2)基础根开 1D3-SZK 铁塔得根开尺寸表12、4-1 表12、4-1 1D3-SZ3根开尺寸表 3)基础所用力 1D3-SZK 铁塔得基础作用力见表12、4-2
智能巡线机器人设计
××××学院 毕业设计说明书 题目智能巡线机器人设计 学生 系别机电工程系 专业班级机械设计制造及其自动化机电03.3班学号 指导教师
××××学院 毕业设计(论文)任务书 设计(论文)题目:智能巡线机器人设计 系:机电系专业:机械设计制造及其自动化(机电一体化) 班级:学号: 学生:指导教师: 接受任务时间 教研室主任(签名)系主任(签名) 1.毕业设计(论文)的主要内容及基本要求 1.总体方案设计; 2机械整体设计; 3.控制设计; 4编写设计说明书; 2.指定查阅的主要参考文献 1.《机器人控制电子学》 2.《机器人探索》 3.《机器人的创意设计与实践》 4.《MSP430系列——FLASH型超低功耗16位单片机》 (电子和机械方面的书)
近年来机器人的研究和应用已经不仅仅局限于军用领域。许多应用于军用机器人上的成功技术已经在民用机器人中得到了一定的应用。在工业机器人的基础上,运用了传感器技术和单片机智能控制技术,设计出了一种能自动运送货物的职能巡线机器人。 论文首先对智能巡线机器人总体设计方案进行叙述,阐述其各要素的工作原理,然后就整个智能巡线机器人系统划分为五个模块,分章节对各个模块设计制作进行阐述。 机器人机械结构部分,通过分析常用的车轮驱动配置方式,择优选择了前排安装两个万向轮、后排安装两个独立驱动轮的设计方案,充分考虑到了巡线的简易性和稳定性。 机器人传感器接口与驱动电路部分,详细阐述了光电传感器检测信号原理,叙述了设计所采用的光电传感器接口电路详细设计方案,分析了传感器采用该种布局方案的原因。针对机器人的机械特性和速度要求,选用了L298N驱动芯片驱动电机,分析了它的优缺点和可行性。 机器人主控系统硬件部分阐述了主控芯片选型,主控电路设计方案,以及相应的接口说明。软件部分在MSP430平台上实现了快速、稳定、准确的巡线方法。 关键词:机器人;巡线;光电检测;PWM驱动。
作品登记表及创作说明.docx
附件2 “评选类项目”推荐作品登记表 (省、自治区、直辖市教育部门审核签章) 作品名称 青蛙的感言作品大小108KB 小学电脑绘画□电脑动画□网页设计制作 □“健康教育”专项动画□“校讯通”专项绘画□微博英语创作初中□电脑绘画□电脑动画□网页设计制作 项目名称□“健康教育”专项动画□“校讯通”专项绘画 □手机动漫创作□微博英语创作 高中□电脑艺术设计□电脑动画(二维)□电脑动画(三维) □网页设计制作□计算机程序设计□“健康教育”专项动画 □手机动漫创作 作者姓名性别身份证号码*学籍所在学校(按单位公章填写)和年级 张红波男青林乡中心小学 指导教师 性别职务/ 职称所在单位(按单位公章填写)姓名 高巍男信息技术教师青林乡中心小学 手机号码作者:指导教师: 电子邮箱作者:指导教师: ga 作者 2 寸免冠照片 (建议粘贴电子版,与此表一并打印) 作者姓名:张红波作者姓名: 我(们)在此确认上述作品为我(们)的原创作品,不涉及和侵占他 人的着作权;我们同意作品出版权等公益性应用权属电脑活动组委会。 我(们)同意“全国中小学电脑制作活动组委会”使用我(们)的作品 并将其制作成《2012 年第十三届全国中小学电脑制作活动优秀作品集锦》 出版。 *注:未满 16 周岁中小学生,按户口本上的身份证号码填写。 作者签名(不得打印或代签):1. 张红波 2. 2012年 2 月 12日 “评选类项目”作品创作说明
创作思想(创作背景、目的和意义) 春天来了,蛙声一片。可是到了夏天,它却成了人们餐桌上的美食,因此,我想就此绘画来告诉人们,青蛙是人类的益友,请不要伤害它。 创作过程(运用了哪些技术或技巧完成主题创作,哪些是得意之处) 全部由 flash8绘制而成。 原创部分 全部原创 参考资源(参考或引用他人资源及出处) 制作用软件及运行环境 其他说明(需要特别说明的问题)
模块学习总结
模块学习总结 1、在前面四个模块中,您做了哪些事情? 在前面四个模块中,我做了以下事情: 在模块一的学习中:用原始密码登陆进去学习平台,修改了个人密码,丰 富了个人资料。并向同组的同学介绍了自己与同组的同学进行了交流;熟悉网络学习环境的界面和常用功能, 浏览了平台使用手册、学员学习指南、教育技术参考手册、软件技术速查手册;和同事一起领取了《生动有趣的电子秤象》的必选案例。 在后三个模块的学习中:采用了相同的学习策略。首先,阅读了学习目标,其次,进行必选案例分析时,先学习本案例涉及到的知识点,如:教学目 标分析、学习者特征、教学模式和教学策略、信息教学资源。第三、阅读案例,然后结合自己的学习,运用相关的知识点,进行案例分析,并上传完成作 业,同时,学习同组同学的案例分析内容。在有时间的情况下选择可选案例进行分析。在必选案例分析的这个内容中,没有得满分,说明学习和分析还存在一定的欠缺,希望老师能给予指导,以便在下几个模块中取得好成绩。 最后,完成技术技能作品。在应用可视化工具进行教学前期分析和应用文字编辑工具进行教案设计、应用frontpage 制作网页课件,我都是以《称赞》 一课来完成的。前两个都取得了满分,但是,网页课件制作,感觉比前面两个有难度。 2、学完这四个模块后,您有哪些收获? 答:学完这四个模块以后,无论是案例分析还是技术技能作品方面都有很大的收获。 在案例分析中对教学技术的知识又进行了学习和梳理,使教学起来更能得心应手,对课堂教学评价也更有的放矢。 在技术技能方面学会了了freemind 这款使用简单、功能强大的软件制作思维导图;对比较熟悉的word 的操作又掌握了新的内容。最高兴的是学会了frontpage 制作简单网页课件的方法,感觉这个课件很有趣味性,对自己的教学帮助很大。 通过四个模块的学习,我还深深感受到电脑知识的欠缺,需要在实践中不断钻研摸索。例如在模块四中,用frontpage XX 制作网页课件《称赞》的过程 中就遇到了二个问题:一是插入背景音乐,找不到合适的音乐,要么太大,要么不合要求,插入mp3 mav等都没成功,后来了解到midi格式的音乐最小,
“光缆线路综合管理系统”功能介绍
“光缆线路综合管理系统”功能介绍 “光缆线路综合管理系统”由实时光缆线路巡检系统、基础信息子系统、日常维护子系统、系统维护子统、线路工程管理子系统、仪表机具/备品备件管理子系统六个功能系统构成。几乎全部涵盖了当前光缆线路管理中所涉及的种种需求。 ◆实时光缆线路巡检系统 代维工作的基础是日常巡线,很多的线路故障都是由于不能及时的发现线路潜在的隐患而造成的,长期以来移动公司对线路代维工作的监管一直是个盲点,现在通过使用“光缆线路综合管理系统”,管理人员就不需要花费宝贵的时间到现场抽查,只需运用“光缆线路综合管理系统”再结合巡线员每月上报的巡检月报即可对巡线员的巡线工作有一个全面的考核。 实时光缆线路巡检系统集全球卫星定位(GPS)、移动通信(GSM)、地理信息(GIS)等技术于一体,能够实时、智能地管理线路维护人员的定期巡回和临时巡回情况,同时利用系统搭建的短信平台为各级维护管理人员提供智能化的信息服务。该系统的研制开发的基本出发点主要是基于对巡检系统实时性、实用性等要求,以及其自身作为产品的广泛适用性需求。
系统构成及原理 光缆线路综合管理系统建立在光缆线路综合管理平台(INFO2000)之上,能够实现与光缆监测、线路资源管理等系统数据的信息共享和无缝连接。它是集全球卫星定位(GPS)、移动通信(GSM)和地理信息(GIS)技术于一体的线路巡回实时管理系统
整个巡检系统由三级巡检中心(省中心、地市中心和传输分局中心)以及手持式移动定位器组成。 各级巡检中心由企业内部网互连,共享线路基础信息资源。 它由系统软件和GSM短信接收模块组成,负责实现维护人员定位信息的接收,并对数据进行相应处理和发布,从而有效地实现对巡回人员维护工作的有效管理和监督。 软件体系结构 系统采用基于TCP/IP 的C/S和B/S结构,实现良好的负载均衡。系统底层数据库采用通用数据库技术,数据库结构对外开放;客户端支持Win98/NT/2000,浏览器端支持多种通用浏览器。 1、系统共分三级中心(省局、市局、分局)。它们的级别控制
I-H2模块速查表
第18章 110kV输电线路 1H2模块杆塔基础通用设计 1H2-SSZ1子模块 18.1 1H2-SSZ1子模块 (1)概述 本模块为对应国网通用设计杆塔1H2模块的SSZ1塔型,适用的地基土为 粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有10个基 础。 (2)基础根开 1H2-SSZ1铁塔的根开尺寸表18.1-1 呼高(m) 基础根开(mm) 地脚螺栓根开(mm) 地脚螺栓规格正面根开侧面根开正面根开侧面根开 21 6600 6600 260 260 4M42(35#) 24 7140 7140 2602604M42(35#) 27 7680 7680 2602604M42(35#) 30 8220 8220 2602604M42(35#) 33 8760 8760 2602604M42(35#) 36 9300 9300 2602604M42(35#) (3)基础作用力 1H2-SSZ1铁塔的基础作用力见表18.1-2(kN) 呼高(m)Tmax Tx Ty Nmax Nx Ny 21 646.9 68.8 63.0 824.6 85.5 79.6 24 661.1 69.9 64.2 841.8 87.2 81.4 27 676.4 73.9 67.4 866.1 90.3 83.9 30 689.8 73.8 67.6 882.4 92.4 86.2 33 703.6 75.5 69.4 899.4 93.1 87.0 36 715.2 78.8 71.8 924.5 97.6 90.6
表18.1-3 1H2-SSZ1-21~36基础工程量速查表: 序号 地质条件底板宽度 (不含垫层) (m) 基础埋深 (含垫层) (m) 1H2-SSZ1-21~36 土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3) 1 粉土稍密,粘土软塑90 10 1.5 4 3. 2 336 2834.8 41.22 7.16 2 粉土稍密,粘土软塑90 10 3 3.8 2.9 336 2386.7 32.43 6.52 3 粘土,中等塑性100 15 2 3.6 3.1 336 2392.9 29.7 5.91 4 粘土,中等塑性100 1 5 3 3. 6 2.8 336 2314.5 27.25 5.91 5 粘土,中等塑性100 15 无 3. 6 2.8 336 2314.5 27.25 5.91 6 粘土,可塑120 20 2 3.4 3.1 336 2258.4 29. 7 5.33 7 粘土,可塑120 20 3 3.4 2.8 336 2211.9 25.91 5.33 8 粘土,可塑120 20 无 3.4 2.8 336 2076 25.57 5.33 9 坚土,硬塑120~140 20 3 3.2 2.8 336 2012.8 22.98 4.79 10 坚土,硬塑120~140 20 无 3.2 2.7 336 1988.8 22.72 4.79
无人机电力巡线系统用户手册
目录 1 项目规程................................................................................. 错误!未指定书签。 2 航飞......................................................................................... 错误!未指定书签。 2.1 资料收集 ...................................................................... 错误!未指定书签。 2.2 编制设计书 .................................................................. 错误!未指定书签。 2.3 航线规划 ...... 2.4 飞行作业 ......2.5 交付第一批成2.6 外业布控及外3 内业......................................................................................... 错误!未指定书签。 3.1 数据入库 ...................................................................... 错误!未指定书签。 3.2 定向及布控 .................................................................. 错误!未指定书签。 3.3 空中三角测量 .............................................................. 错误!未指定书签。 3.4 DSM 提取 ..................................................................... 错误!未指定书签。 3.5 弧垂提取 ...................................................................... 错误!未指定书签。 3.6 危险点判读 .................................................................. 错误!未指定书签。 4 成果输出................................................................................. 错误!未指定书签。 5 平台环境................................................................................. 错误!未指定书签。 5.1 硬件 .............................................................................. 错误!未指定书签。 5.2 软件 .............................................................................. 错误!未指定书签。 6 项目案例................................................................................. 错误!未指定书签。 6.1 基本情况 ...................................................................... 错误!未指定书签。 6.2 阶段成果 ...................................................................... 错误!未指定书签。 航天远景空间地理信息(深圳)有限公司 电力巡线系统手册 2015年10月编制
无人机电力巡线系统用户手册
洋洋味道 洋洋味道洋洋味道
目录
1项目规程 2航飞 2.1资料收集 项目开始前需要进行相关资料收集。包括项目区基本情况,地理位置,经纬度,气候,海拔等,另附一张该区域谷歌影像图。(补充一个信息列表,满足类型,精度,坐标系,中央子午线,范围,时项等) 2.2编制设计书 航飞设计书包括测区概况、相机检校、航飞摄影要求、分辨率、航带规划。(内容清单)2.3航线规划 导入巡检线路,自动划分航线,并定义航线的起拍点和终止点。与无人机地面站建立接口,用于航线规划。(补充一张航线规划图)
2.4飞行作业 2.5交付第一批成果 外业航拍作业完成后,须向内业数据处理中心提交以下航拍数据资料: 1、航拍原始影像数据 2、数码相机检测报告 数码相机检测报告需提交如下内容: 相机序列号、镜头编号、像幅大小、像素大小、CCD大小、像主点x0、像主点y0、焦距f、径向畸变系数k1\k2\k3、偏心畸变系数P1\P2、坐标原点位置等信息。 3、航拍照片数据 4、地面控制点坐标参数 5、航拍飞行轨迹回放数据 6、设计航线示意图
7、航摄飞行记录表 8、航拍前拍两张照片和航拍后拍两张照片(对300米外同一物体)。
2.6外业布控及外业测量 返回点表和图; 3内业 3.1数据入库 航飞影像图、外业控制数据入库。(空三导入的界面) 3.2定向及布控 参考HAT软件(或直接复制过来) 3.3空中三角测量 完成巡查区内的影像定位、定向。选用HAT,利用其高性能转点和稀少控制的特性,为系统提供可靠的空三加密成果。 空三成果平差表和转点成果图 3.4DSM提取 利用摄影测量的方法通过同名像点间接解求地物点三维坐标,获取地面点云,DSM自
18种查询表的方法_中文版
(sap-abap)18种根据屏幕字段(2009-06-05 17:22:43) 想象一下这样的情景。一个业务经理希望得到一个关于她的服务订单的专用报表,她给了你一个报表的草图(包括列、行、标题、分组、小计、合计等等),而“服务管理”事务屏幕中的字段就包含了她希望你在报表中显示的数据。 你该怎么做?通常的,你会检查系统中运行的,能够提供这个业务经理所需信息的现存报表(或者 是已经为这个client写过的),或者可以复制和修改后能符合需要的报表。如果没有找到,你也许会 在适当的报表系统——例如,工厂维护信息系统(PMIS)——中看看是否能找到合适的。即使这 样,你仍然无法找到报表,或者无法从现存报表中找到可修改的,那只能写一个报表或者一个ABAP 查询来实现这个需求。 现在,设想一下业务经理问你是否以某种方式在《创建计量单位文档事务》中增加一个小小的功能: 向MDoc文本字段中粘贴相关销售订单号。这个要求需要你创建一个增强功能。在前面两个情形中, 你都需要访问数据库表中的特定数据。你怎么以屏幕字段做指导来找到这些数据?我们都知道与一 个事务关联的信息都存储在几个(偶尔还会是很多个)相关的表里。这样,当你需要在报表或增强 功能中使用一个事务中的几个字段时,你需要找出许多事务的表并在它们之间建立关联。这些关联 通常都不会很明显。 我曾经在众多场合遇到这些情况,有时需要同时在SD、MM、IM、WM和服务管理(现在叫客户服 务)等模块对多个client进行工作。随着时间推移,我收集了同事和自己在开发中寻找需要数据的建 议。我现在来跟你分享这些技巧——共18种。 起跑线和终点线 我将会介绍达成本练习“终点线”的各种各样的技巧——也就是说,定位那些在屏幕字段中存储潜 在数据的表和字段。你未必需要所有这些方法,一般来说,前四种技巧已经足够了。我之所以写其 他的技巧是因为有些字段非常难以追踪,而这些工具或许可以解决问题。 起点
K-2B3子模块说明及速查表
第20章 220kV输电线路2B3模块杆塔基础通用设计 2B3-ZB1子模块 20.1 2B3-ZB1子模块 (1)概述 本模块为对应国网通用设计杆塔2B3模块的ZB1塔型,为直线塔型;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有20个基础。 (2)基础根开 2B3-ZB1铁塔的根开尺寸表20.1-1 (3)基础作用力 2B3-ZB1铁塔的基础作用力见表20.1-2(kN) 呼高(m)Tmax Tx Ty Nmax Nx Ny 18153.55 17.45 14.32 205.95 21.64 18.52 21164.64 17.91 15.04 218.17 22.33 19.46 24174.57 18.57 15.91 229.39 22.81 20.14 27182.31 19.4 16.63 240.96 24.33 21.57 30 190.53 20.1 17.48 250.75 24.66 22.04 33 196.92 20.72 17.97 261.53 26.25 23.5 36 204.02 21.28 18.65 270.19 26.57 23.95 (4)基础工程量速查表 呼高(m) 基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格 (Q235)正面根开侧面根开正面根开侧面根开 18 3770 3770 200 200 4M27 21 4250 4250 200 200 4M27 24 4730 4730 200 200 4M27 27 5210 5210 200 200 4M27 30 5690 5690 200 200 4M27 33 6165 6165 200 200 4M27 36 6645 6645 200 200 4M27
巡线机器人设计说明书
第一章绪论 §1.1研究背景及意义 电力系统最重要的任务是提供高质量和高可靠性的电力。电力传输必须依靠高压输电线路,它的安全稳定运行直接影响电力系统的可靠性。由于输电线路分布点多、面广,绝大部分远离城镇,所处地形复杂,自然环境恶劣,且电力线及杆塔附件长期暴露在野外,会受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换,原来微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积停电,从而造成极大的经济损失和严重的社会影响。所以,必须对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况以及线路周围环境和线路保护区的变化情况,以便及时发现和消除隐患,预防事故的发生,确保供电安全。目前,对输电线路的巡检主要采用两种方法,即地面人工目测法和直升飞机航测法。前者的巡检精度低,劳动强度大,且存在巡检盲区。部分地区大雪封山时,车辆和行人无法进入(如图1.1所示);在深山还有野兽出没,这给巡视人员带来了很大的安全隐患;后者则存在飞行安全隐患且巡线费用昂贵(如图1.2所示)。如果用直升机巡视替代地面巡视,则每100公里1年巡视费用同塔双回线需217.92万元(单回线136万元)。如果用直升机在整个东北电网覆盖地区巡视则需超过5000万元。费用过于昂贵,直接限制了直升机巡视的广泛推广。 由于巡线机器人可以克服上述缺陷,因此,巡线机器人已成为特种机器领域的一个研究热点。巡线机器人不仅可以减轻工人巡线的劳动强度,降低高压输电的运行维护成本,还可以提高巡检作业的质量和科学管理技术水平,对于增强电力生产自动化综合能力,创造更高的经济效益和社会效益都具有重要意义。 巡线机器人悬挂于架空避雷线上,并以此为行驶作业路径,通过自动控制方式完成输电线路巡检作业,及对线路的机械电气故障,包括绝缘子劣化和污秽、导线的机械破损、连接金具机械松脱等故障进行检测。其特殊的作业环境要求机器人能够沿输电导线全程运行,包括沿输电导线的直线段和耐张线段实现滚动爬行,跨越及避让悬垂线夹、悬垂绝缘子、防振锤、耐张线夹等结构型障碍物。 因此,机器人的本体设计是整机设计中一个相当重要的部分,需经过多次反复才能完成;在进行机器人结构分析和设计时,需要建立一定的实验环境(导线物理模型、障碍物等),对样机进行多次实验以检验其是否能达到预期的目标,这就导致其设计的周期长、设计效率低以及改型工作量大等缺点。此外,样机的单机制造增加了成本。在竞争的市场条件下,基于物理样机的设计验证过程严重
文件管理 功能模块介绍
电子邮件 电子邮件可以绑定用户的电子邮箱,也可作为OA系统内部进行邮件交流的功能,电子邮件是融合了内部邮件和Internet邮件功能的内外一体邮件模块。下图显示的是邮件的查看方式。 首先需要定义Internet邮箱,点击“Internet邮箱管理”,进行电子邮件地址和密码的配置,只有开通了pop服务的邮箱才能支持。
当用户填写电子邮件地址时,下面的接收服务器和发送服务器会自动填写。用户登录格式分为“仅用户名”和“用户名@主机名”两种,用户根据邮箱提供商自行选择。邮箱设置完成后,系统就会在默认时间内自动查询该邮箱是否有新邮件,如果有新邮件会以内部短信方式提醒用户。 写邮件时,除可添加系统内收件人,也可以手动输入外部邮件收件人地址或通过通讯簿添加外部收件人。 当邮件发送出去后,在“已发送”中可以看到该邮件的发送状态,包括对方未阅读“”、对方已阅读“”和对方已删除“”三种状态。其中,对于收件人没有查看的邮件,发件人还可以编辑修改或删除。 所有的邮件都可以导出为“.eml”和Excel格式备份,可节省服务器上空间,而且可以同时选择多个邮件实现导出。对于对方已经删除的邮件无法再实现编辑。点击“再次发送”,则进入邮件编辑状态,并可以重新发送。 收件箱中能看到邮件的主题、状态、重要程度和附件等信息(附件信息必须要在邮件查阅完毕后才能显示出来),状态显示了新邮件和已读两种状态,重要程度则是发件人选择,在此处可见。 邮件查询提供对内部邮件的查询,可以通过邮箱、邮件状态、时间、主题、内容以及附件所包含的关键词进行查询,其中内容最多可以选择三个包含关键词,如下图所示:
注:内部邮件有智能存储优化功能,发送的邮件和对方接收的邮件只占用1份磁盘空间,群发也如此。 内部短信 发送内部短信的界面如下,在“收件人”中选择添加系统的用户名,在“短信内容”中输入将要发送的短消息内容,如若需要作为预定时间发送消息,则可以修改短消息发送时间,系统将在用户指定的时间将消息发送出去。 收信人很快可以收到短信,其屏幕上会弹出一个提示窗口,提示查看短信,收件人如果已看过该短信,点击“已阅”则不再提醒,可直接在下面的输入框中
医院管理系统功能模块说明
医院管理系统功能模块说明 门诊挂号系统 系统概述:主要完成病人的挂号、收费业务,以及医院内部及与院外单位结算; 门诊挂号 普通挂号收费:进行挂号收费、退号退费、废票重打等业务的办理。支持磁卡或IC卡挂号及相关操作,可预约挂号,选择医师就诊,能打印明细单。 普通挂号退费:由于挂号登记错误或病人要求对挂号进行退号。 发票补打:由于系统出错,或打印机出错,或收费错误结原发票作费,重新产生一张发票 挂号查询 挂号信息查询:查询指定时间段,所有挂号信息与挂号费用查询。 挂号发票查询(按发票):按发票号查询所有挂号信息与费用 挂号发票查询(按时间):按时间段查询所有挂号信息与费用 退费信息查询:查询指定时间段所有退费信息与费用。 挂号员工作量统计:统计指定时间段挂号员所挂号次数与金额 门诊收费缴款单:门诊收费员对本次收费进行上缴 系统维护 更改密码 注销重新登录 关闭当前窗口 关闭系统 门诊医生工作站 系统概述:门诊医生工作站系统主要功能是下医嘱;电子处方输入、病历病案菜单输入、各种结果单据查询、临床数据(含图像)查询;处理、自动计算费用并扣款;药品、 药理特性查阅;保证药房能够看到价格,取到药品,杜绝无效处方;可随时查询 同病人相关的信息。 主要功能介绍: 医生工作台 门诊病历录入:录入门诊病人的信息,诊断情况进行录入 门诊处方录入:录入门诊病人的用药,检疗等费用 门诊病人查询:查询指定时间段门诊病人详细记录 门诊药品单打印:查询指定时间段门诊用药流水记录 门诊病人病历打印 门诊病人费用查询:查询指定时间段门诊病人费用明细记录 医生工作台查询 病人信息查询:通过输入时间段和病人唯一标识信息,查询该病人在这段时间内的就诊记录信息,其中包括处方信息、检查、检验申请单信息以及门诊病历信息。模板字典维护:制作、维护病历模板信息,以便医生工作站在录入电子病历的时候直接调用。
G1E6子模块说明及速查表
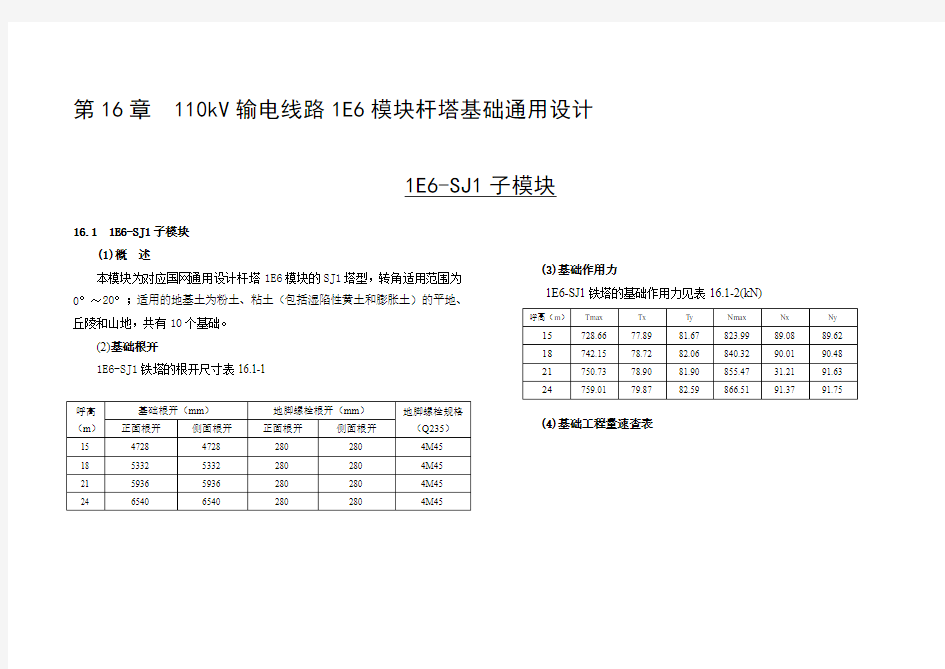
第16章 110kV输电线路1E6模块杆塔基础通用设计 1E6-SJ1子模块 16.1 1E6-SJ1子模块 (1)概述 本模块为对应国网通用设计杆塔1E6模块的SJ1塔型,转角适用范围为0°~20°;适用的地基土为粉土、粘土(包括湿陷性黄土和膨胀土)的平地、丘陵和山地,共有10个基础。 (2)基础根开 1E6-SJ1铁塔的根开尺寸表16.1-1 (3)基础作用力 1E6-SJ1铁塔的基础作用力见表16.1-2(kN) 呼高(m)Tmax Tx Ty Nmax Nx Ny 15728.66 77.89 81.67 823.99 89.08 89.62 18742.15 78.72 82.06 840.32 90.01 90.48 21750.73 78.90 81.90 855.47 31.21 91.63 24759.01 79.87 82.59 866.51 91.37 91.75 (4)基础工程量速查表 呼高(m) 基础根开(mm)地脚螺栓根开(mm)地脚螺栓规格 (Q235)正面根开侧面根开正面根开侧面根开 15 4728 4728 280 280 4M45 18 5332 5332 280 280 4M45 21 5936 5936 280 280 4M45 24 6540 6540 280 280 4M45
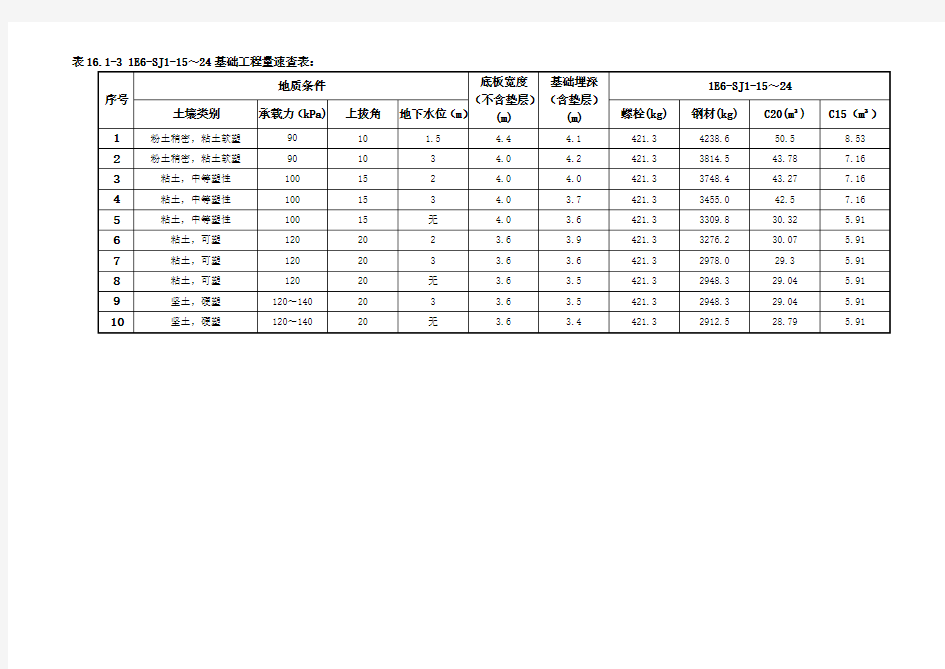
表16.1-3 1E6-SJ1-15~24基础工程量速查表: 序号 地质条件底板宽度 (不含垫层) (m) 基础埋深 (含垫层) (m) 1E6-SJ1-15~24 土壤类别承载力(kPa) 上拔角地下水位(m)螺栓(kg) 钢材(kg) C20(m3)C15(m3) 1 粉土稍密,粘土软塑90 10 1.5 4.4 4.1 421.3 4238.6 50.5 8.53 2 粉土稍密,粘土软塑90 10 3 4.0 4.2 421.3 3814.5 43.78 7.16 3 粘土,中等塑性100 15 2 4.0 4.0 421.3 3748. 4 43.27 7.16 4 粘土,中等塑性100 1 5 3 4.0 3.7 421.3 3455.0 42.5 7.16 5 粘土,中等塑性100 15 无 4.0 3. 6 421.3 3309.8 30.32 5.91 6 粘土,可塑120 20 2 3.6 3.9 421.3 3276.2 30.0 7 5.91 7 粘土,可塑120 20 3 3.6 3.6 421.3 2978.0 29.3 5.91 8 粘土,可塑120 20 无 3.6 3.5 421.3 2948.3 29.04 5.91 9 坚土,硬塑120~140 20 3 3.6 3.5 421.3 2948.3 29.04 5.91 10 坚土,硬塑120~140 20 无 3.6 3.4 421.3 2912.5 28.79 5.91
电力监控方案说明
1. 应用背景 无线技术应用的爆炸性增长,势必对组织与个人之间的相互作用方式产生根本性变革。企业必须改进受到有线技术的诸多局限的应用系统。为了在竞争中保持领先,企业需要使用无线技术使其业务的关键部分具备移动能力。在此背景下,移动化数据应用便成为大势所趋。 通常的电力应用系统中,信息技术的采用更多表现为以数据存储及信息传递为主。然而企业面临的信息来源、信息量和处理要求都在迅速增长,由此对工作效率和反应速度也提出了更高的要求。就目前电力行业的巡检系统而言,虽然都已实现了基本的信息化,但原有模式显然难以满足日益增长的事务处理、信息共享、工作协同和决策支持等方面的要求。为保证企业管理和业务决策的更加迅速及时,为达到与国际一流企业的现代化管理水平接轨的要求,充分利用先进的移动技术对于系统的建设中就显得格外重要了。 2. 电力巡检集成技术 对于如何实现有效的电力线路巡检管理,目前除了采用传统大的人工直接巡检外,还有采用视频监控、综合检修车,甚至直升飞机等电力线路巡检手段。这些方式在对国内电力企业来说,成本过高,实施困难,且不易推广,同时也难以解决巡视工作中人为因素的影响。国内的电力行业在传统的人工巡检方式基础上,开始尝试一些新的方式。常见的电力巡检集成技术包括: 信息钮、IC卡巡检: 每条线路的每支杆塔都需要安装相应的设备,如信息钮(也称信息螺栓),上有检测雷击电流通过杆塔的传感器。巡检人员线路巡查时使用巡检器,事先要将杆塔对应的线路名称及杆塔编号信息写入信息钮。巡检员到达需要查看的杆塔时,旋下螺栓盖后用巡检器对准信息钮的定位口,巡检器显示并记录相应杆、塔的线路名称及编号以及检测日期和时间。巡检器所记录的上述内容由巡检IC卡提取,然后,计算机系统软件通过对巡检IC卡信息的读取,将巡线员巡视每级杆塔的时间、杆塔遭雷击的信息以及线路各种缺陷类型的详细情况自动录入到计算机中。这种方式综合成本高,且维护这些额外的信息装置增加了实际的维护和检修工作。江西用得多一些。 PDA+条码: 事先在杆塔上完成条码标记定位,巡检员到达时用带扫描装置的PDA进行扫描,通过条码信息确认所在杆塔位置,然后将缺陷等详细情况录入到PDA中。但巡检人员经常需要更换杆塔上的巡检条码,所以使用管理都不方便。 PDA+GPS:
VJC-WER模块使用说明
WER巡线模块使用说明 基本巡线原理: 1.机器人巡线过程分为以下两个过程: 1)机器人中央压线时,直线前进 2)机器人偏离线道时,通过向线矫正力调整到过程1) 2.巡线模块的执行以路口或着时间段为单位 3.路口的判断:(机器人前方的灰度传感器,从左到右编号为0-6) 机器人检测路口是通过指定编号的灰度传感器(一般为0或6)是否检测到线道为条件。 巡线模块使用方法: 1.如何加载巡线模块库 打开VJC-WER1.0 在流程图界面下,选择“编辑”工具栏,在下拉菜单中选择“巡线模块库”
参数界面如下: 完成以上步骤会在模块 库的最后一栏多出“巡线 模块库” 巡线要用的模块都包含 在其中 2.如何使用巡线模块库 模块一: 功能:初始化接在0(左)和1(右)通道上电机的方向,并且包含地面灰 度自动检测功能 参数界面如下所示:
参数: ?左/右电机方向:正转表示保持原本电机运行方向,反转表示使电机反向运行,保证左右电机速度设为正值时可以驱动机器人可以往前走 ?左/右电机功率(0~1):调节左右电机功率,保证左右电机同样速度下,机器人走直线 ?包含地面灰度自检功能,运行程序后一秒内按下自动进入灰度自检模式,流程参照模块界面 模块二: 功能:预定义巡线的方式.(影响该模块以下所有的巡线模块) 参数界面如下: 参数: ?巡线颜色:机器人走底楼选择黑色,走二楼选择白色 ?巡线矫正力级别(1-7):代表机器人在巡线过程中如果中央偏离线条,矫正的力量大小级别。(数值越大,矫正力量越大) ?黑白门槛值:(参数类型为灰度值)代表从非巡线颜色到巡线颜色之间灰度阀
查询模块详细说明书
查询模块详细说明书 引言 本章对该文档的目的、功能范围、术语、相关文档、参考资料、版本更新进行说明。 编写目的 本文档的目旨在推动软件工程的规范化,使设计人员遵循统一的详细设计书写规范,节省制作文档的时间,降低系统实现的风险,做到系统设计资料的规范性与全面性,以利于系统的实现、测试、维护、版本升级等。详细设计的详细程度,应达到可以编写程序的程度。 范围() 本文档用于软件设计阶段的详细设计,它的上游(依据的基线)是《概要设计说明书》,它的下游是源程序清单及单元测试计划,并为单元测试报告提供测试依据。该范围应覆盖《概要设计说明书》中的功能点列表、性能点列表、接口列表。 软件详细设计的范围是:各子系统的公用模块实现设计、专用模块实现设计、存储过程实现设计、触发器实现设计、外部接口实现设计、部门角色授权设计、其他详细设计等。 按照层结构()的布局,详细设计应从下面个方面进行。数据库服务器上的面向数据的设计:数据字典物理设计、基本表物理设计、中间表物理设计(报表设计)、临时表物理设计、视图物理设计、存储过程物理设计、触发器物理设计。应用服务器上的面向业务逻辑的设计:接口数据设计、中间件设计、数据通信传输设计、可视构件设计、非可视构件设计、角色授权设计、功能点设计(功能点列表设计)。浏览器上的面向对象的设计:录入修改界面设计、浏览查询界面设计、登录注册界面设计、信息发布界面设计。 背景 随着企业管理信息化的发展,网络及计算机的引入使管理跃上了一个新的发展平台。企业的各项管理都将向信息化方向扩展,企业生产管理系统对于企业来说尤为重要。 查询模块是一个企业生产管理系统不可缺少的部分,它的内容对于企业的决策者和管理者来说都至关重要,所以查询模块应该能够为用户提供充足的信息和快捷的查询手段。但一直以来人们使用传统人工的方式管理产品,这种管理方式存在着许多缺点,如:效率低、保密性差等。另外,由于时间一长,将产生大量的文件和数据,这对于查找、更新和维护产品都带来了不少的困难。 作为计算机应用的一部分,使用计算机辅助企业管理,有着手工管理所无法比拟的优点。例如:检索迅速、查找方便、可靠性高、存储量大、保密性好、寿命长、成本低等。这些优点能够极大地提高仓库管理的效率。
企业巡线应用解决实施方案
企业巡线应用解决实施方案
————————————————————————————————作者:————————————————————————————————日期:
企业巡线应用解决方案 一、项目背景 巡线指电信、电力、管网、水利、护林等国民经济基础行业为保持自身光缆、电缆、水利管网、森林防火等的正常运作而开展的周期性的排查巡检。 巡线行业的巡检线路普通范围广,线路长。以往巡线人员亲自到现场巡视线路,通常以纸介质方式记录巡视情况,再人工录入计算机。人工录入数据量大,录入过程易出错。传统的人工巡线受地形环境、人员素质、天气状况等不确定因素的影响,效率低,复巡周期长,巡检数据准确率不高。同时,对于巡线人员是否巡视到位无法进行有效监督,巡视质量得不到保障,线路安全亦得不到保证。 二、需求分析 对线路的巡查和附属设施的巡检工作进行管理的目标是能降低成本、提高工作效率以及管理水平。巡线业务管理工作中突出的问题表现如下: (1)管理区域大、地形和路况复杂,给巡线员和车辆的管理带来很大难度; (2)不清楚车辆执行光缆检查任务过程中,是否存在公车私用、违规驾驶等现象; (3)一旦发生故障或者领导想查看故障现场情况,没有可靠记录; (4)管理者无法客观、方便的掌握巡检人员巡检的到位情况; (5)巡线人员不按工作流程和规定行驶路线工作; (6)车辆费用管理难,无规范便捷的报表分析。 目前管线巡查工作主要依靠员工的责任心和自觉性,并结合不定期的现场抽查等管理方法,对数据缺乏有效的处理手段。这样源头的巡检质量和数据真实性无法保障,同时采集回的数据也得不到很好的利用。因此需要借助现代新的技术搭建巡检信息管理平台提高巡检工作的质量。