学习笔记——舰载机进舰着舰过程仿真建模_王延刚
舰载机进舰着舰过程仿真建模_王延刚
收稿日期:2007-07-17 修回日期:2008-11-24
第20 卷第24 期系统仿真学报
摘要:航母—舰载机—起落架,多体动力学系统,进舰着舰系统仿真模型,驾驶员和LSO 的行为特征,考虑风场扰动,海浪等因素。该模型不仅适于航母-舰载机适配性问题,还可研究进舰着舰任务中LSO 对驾驶员行为的影响。通过仿真示例验证该模型的合理性和可行性。引言:首先介绍舰载机进舰着舰的基本过程,并从飞行动力学的角度出发,阐述涉及的相关问题,然后对仿真系统各模块进行分析,并提出相应建模方法,最后给出数字仿真结果,以验证其合理性。
1、舰载机进舰着舰过程描述
?菲涅尔透镜光学助降系统(Fresnel Lens Optical Landing System, FLOLS);
?舰载机沿下滑道保持大约-3.5°的航迹角下滑;
?平行于下滑道的5层光束,最中间为橙色,为理想航迹;
?LSO综合甲板运动、飞机特性、驾驶员技术要求调整飞行状态或者复飞。
?常规飞机着陆:拉平;舰载机:助降系统引导,撞击式着舰,通过拦阻系统强制飞机在50——70m内减速止动,有时LSO警告驾驶员做逃逸机动。
2、建模方法
2.1航母运动建模
?海上运动包括前向行驶运动和海浪造成的扰动运动,工程实践中,前者按定常直线运动处理,而后者采用平稳随机过程理论描述。
?文献[10]提供一种拟合窄带平稳随机过程频谱的实用有效的工程方法——成形滤波器法,以白噪声输入一个拟合的航母运动近似传递函数,得到航母扰动运动,再叠加航母行驶运动最终得到用于仿真的舰船运动。
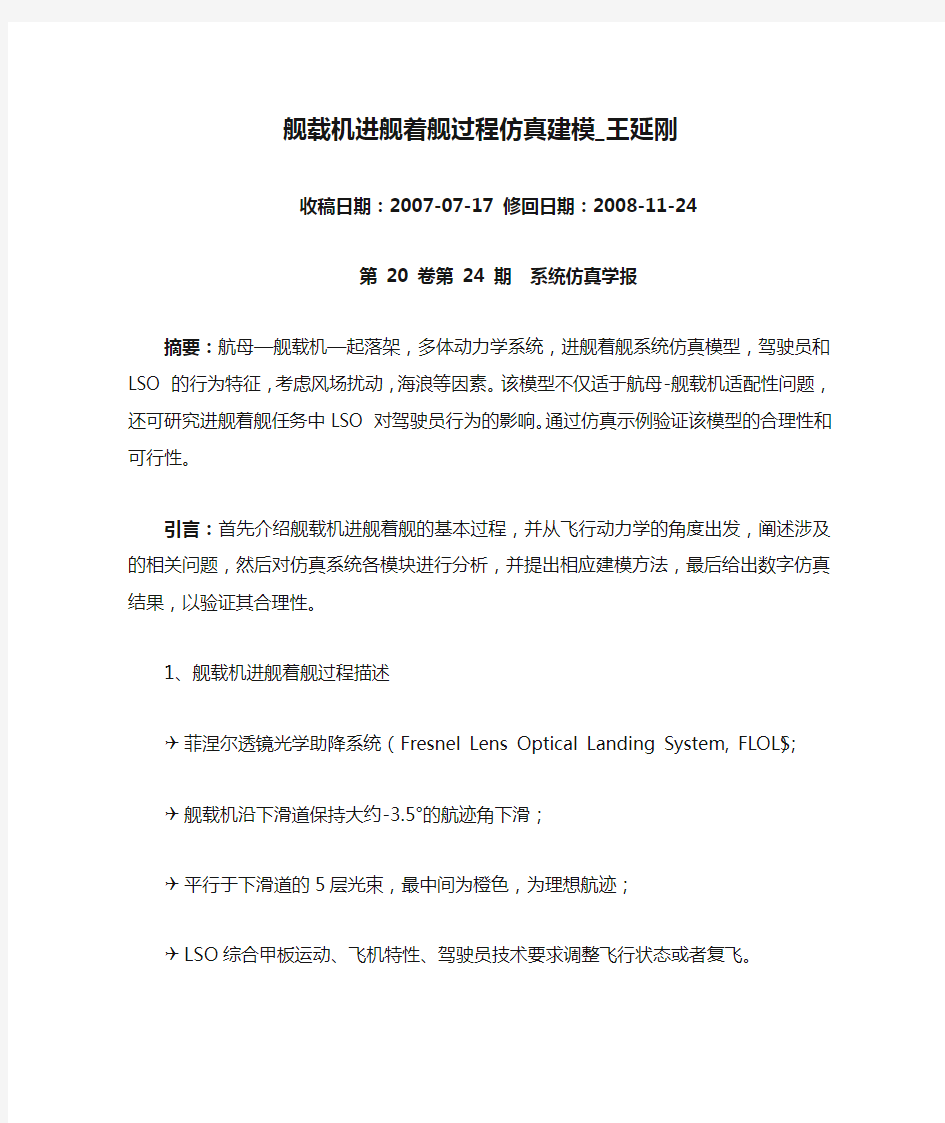
图1舰载机着舰示意图
2.2航母扰流建模
?航空母舰扰流的模拟方式有频域法、数据库法和工程化方法三种,仿真模拟较为普遍采用的是第三种方法。
?该方法主要是根据航母扰流的物理特性和成因建立模型,以美军标1797A推荐的模型较为完善,给出的航母舰尾流(包括稳态分量、自由紊流分量、周期性分量以及随机分量)扰动速度的空间分布,能满足工程需要。
?航母舰尾流(包括稳态分量、自由紊流分量、周期性分量以及随机分量),同舰尾流对舰载机着舰轨迹和动态响应的影响研究_胡国才中舰尾流模型一致。
2.3柔性多体系统建模
?起落架接触航母甲板之后,舰载机进舰着舰动力学系统可视为航母、舰载机、起落架组成的柔性多体系统。
2.3.1起落架系统
?起落架系统的运动模型方面的研究已经比较成熟;[13-15]
?该系统主要由缓冲器和轮胎组成,缓冲器部分可视为一个非线性弹簧和一个非线性阻尼器的组合体,而轮胎则视为非线性弹簧与滑移铰的组合,并认为起落架质量集中在缓冲器和轮胎的结合处。据此建立起落架-轮胎仿真模型,缓冲器和轮胎产生的力仅是各自压缩量的函数,而滑移铰所受摩擦力也可转化为轮胎压缩量的函数。
图2起落架—轮胎系统模型示意图
2.3.2多体动力学系统
?运动航母的舰体坐标系和舰载机的航迹坐标系
?考虑起落架-轮胎系统的动态特性时,由于舰载机与起落架,起落架与甲板之间存在严重耦合关系;利用张量理论,可以将矢量和矢量矩的表示整齐划一,张量运算又附带参考坐标系的转换,使模型形式上得到简化,物理概念更加直观。
2.4着舰信号官LSO模型
?模糊理论
?对甲板运动和飞行轨迹的预测
?人工神经网络技术
图3着舰信号官的行为模型
2.5驾驶员模型
?驾驶员在下滑道入口遭遇较小扰动偏差,其操作是连续跟踪行为;遭遇较大初始偏差,驾驶员需要进行大调整甚至复飞;
?在进舰着舰整个过程中,驾驶员根据飞行偏差的大小采取不同的操作方式,符合人的变策略控制行为特征,因此,适于采用滑动模态变结构控制技术,构建驾驶员变策略控制模型。驾驶员变策略控制模型具体可分为连续跟踪驾驶员模型,搜索捕获驾驶员模型,复飞驾驶员模型和逃逸驾驶员模型。
图4变策略驾驶员模型
3、模型结构框图
图5舰载机进舰着舰系统仿真结构模型
4、仿真实例
5、结论
?本文以航母—舰载机—起落架组成的柔性多体系统为动力学核心,构建了完整的舰载机进舰着舰系统仿真模型。
?模型完整性不仅体现在对舰载机进舰着舰任务实现上,而且综合了能够反映驾驶员和LSO的行为特征的操作指令模型,并且考虑舰载机特殊的扰动风场和海浪运动等外部环境。
?因此,该仿真模型不仅能够研究舰载机着舰飞行动力学问题,而且对研究航母—舰载机的适配性、航母—舰载机—起落架相互耦合等多学科交叉问题都有着重要的理论和实际意义,为探索LSO 对驾驶员行为的影响特性、研究二者协作机理提供便利的仿真工具。
参考文献
[1] Urnes J M, Hess R K. Development of the F/A-18A Automatic CarrierLanding System [J]. Journal of Guidance, Control and Dynamics(S0731-5090), 1985, 18(3): 289-295.
[2] 张明廉, 徐军. 舰载飞机自动着舰系统的研究[J]. 北京航空航天大学学报, 1994, 20(4): 386-291.
[3] 于勇, 杨一栋, 代世俊. 着舰导引中的H∞飞行/推理控制系统研究[J]. 南京理工大学学报, 2003, 27(3): 256-260.
[4] Steinberg Marc L. A Comparison of Neural, Fuzzy, Evolutionary, andAdaptive Approaches for Carrier Landing [C]// AIAA Guidance,Navigation, and Control Conference, 2001. USA: AIAA, 2001.
[5] Anderson M R. Inner and Outer Loop Manual Control of CarrierAircraft Landing [C]// AIAA Guidance, Navigation and ControlConference, 1996. USA: AIAA, 1996.
[6] 屈香菊, 崔海亮. 舰载机进舰任务中的驾驶员变策略控制模型[J].北京航空航天大学学报, 2003, 29(11): 993-997
[7] Richards R, Chrenka J, Thordsen M. Artificial intelligence techniquefor Pilot Approach Decision Aid Logic (PADAL) System [R]//AD-A388045, 2001. USA: AD, 2001.
[8] 石明, 屈香菊, 王萌辉. 甲板运动对舰载机人工着舰的影响和补偿[J]. 飞行力学, 2006, 24(1): 5-8.
[9] 石明, 崔海亮, 屈香菊. 舰载飞机进舰降落信号员模型建模[J]. 北京航空航天大学学报, 2006, 32(2): 135-138.
[10] Durand T S, Teper G L. An Analysis of Terminal Flight Path Controlin Carrier Landing [R]// AD606040, 1964. USA: AD, 1964.
[11] 彭兢, 金长江. 航空母舰尾流数值仿真研究[J]. 北京航空航天大学学报, 2000, 26(3): 340-343.
[12] Flying Qualities of Piloted Aircraft. MIL-STD-1797 [S]. March 1987.
[13] Liu Weiwei, Qu Xiangju. Modeling of carrier-based aircraft ski jumptake-off based on tensor [J]. Chinese Journal of Aeronautics(S1000-9361), 2005, 18(4): 326-335.
[14] 徐冬苓, 李玉忍. 飞机起落架数学模型的研究[J]. 系统仿真学报,2005, 17(4): 831-833. (Xu Dongling, Li Yuren. Mathematical modelresearch on aircraft landing gear [J]. Journal of System Simulation(S1004-731X), 2005, 17(4): 831-833.)
[15] 朱剑毅, 李麟. 飞机起落架的动力学建模及仿真[J]. 系统仿真学报,2006, 18(6): 1434-1436. (Zhu Jianyi, Li Lin. Dynamics modeling and simulation of planes’landing gear [J]. Journal of System Simulation(S1004-731X), 2006, 18(6): 1434-1436.)
制造系统建模与仿真在工业工程中的应用
制造系统建模与仿真在工业工程中的应用 摘要:建模与仿真技术是21世纪信息技术和制造技术结合的桥梁,是使企业产生最大经济效益的核心技术,也是21世纪制造业的一项关键支撑技术。本文阐述了仿真技术在制造业的地位和作用,总结建模与仿真技术的特点,给出了制造业建模与仿真技术的方展方向。 关键词:制造系统建模仿真 仿真应用系统建模与仿真技术是以相似原理、模型理论、系统技术、信息技术以及建模与仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的物理效应设备及仿真器为工具,利用模型参与已有或设想的系统进行研究、分析、设计、加工生产、试验、运行、评估、维护、和报废(全生命周期)活动的一门多学科的综合性技术 1制造业建模与仿真技术的地位 制造业是国民经济和社会发展的物质基础,是国家综合国力的重要体现;21世纪的制造业仍然是国家经济和国防建设的命脉,也是国家经济实现快速增长的重要因素。制造业是所有与制造有关的企业机构的总体,是国民经济的支柱产业,它一方面创造价值,生产物质财富和新的知识,另一方面为国民经济各个部门包括国防和科学技术的进步与发展提供先进的手段和装备。现代制造的基本特点是大制造和全过程。“大制造”应包括光机电产品的制造、工业流程制造、材料制备等,它是一种广义制造概念。“全过程”,不仅包括从毛坯到成品的加工制造过程,还包括产品的市场信息分析,产品决策,产品的设计、加工和制造过程,产品的销售和售后服务,报废产品的处理和回收,以至产品的全寿命过程的设计、制造和管理。由于国内外市场竞争的加剧,科学技术发展迅速,产品更新换代速度加快及人们对产品多样化的需求增加,先后出现了柔性制造,计算机集成制造、并行工程、虚拟制造、敏捷制造、网络化制造、现代集成制造、下一代制造、综合制造等新的先进制造理念和哲理。但是,从整体来看,制造业的发展离不开先进的信息与知识技术、全面的建模与仿真技术、精密的工艺与装备技术和高效的企业集成技术共四大关键技术。建模与仿真作为一种重要手段,通常可以渗透到先进制造当中去,并帮助先进制造实现集成,从而促进一些先进制造技术的发展。建模与仿真(M&S)技术在改进产品和过程,缩短市场响应时间,以及降低产品实现的成本方面,具有其它技术 无法比拟的重要作用。 2制造业建模与仿真技术的作用 当今的制造系统是集现代机械制造、计算机科学和管理工程于一体的综合应用,由于它技术复杂、投资巨大,采用建造实体系统进行研究显然是不合理的。
世界各国航母舰载机指挥手语图解
世界各国航母舰载机指挥手语图解 由于飞机起降时声音巨大,所有的口令都是通过手势来表达。在一个起落架次中,记者就看到了30多种手势。有关人士对各种手势的含义作了详细的解答。双臂上举,食指上指,做圆周运动。“这是命令偏流板升起。” 一条手臂从头顶垂直方向扫向水平方向,再回到头顶。“这是着舰区甲板引导员给出的甲板畅通手势。” 图为中国航母起飞助理的起飞手势,中国海军飞行助理的规范手势显然模仿了美军。 起飞助理对着飞行员向上伸出拇指。“这是示意飞行员检查完毕,一切正常。” 飞行助理下蹲屈身,右手臂迅速上扬,“这是示意放下止动轮挡和偏流板,飞机起飞。因其姿势酷似举枪射击,因此飞行助理又被戏称为‘射手’。” “飞行员头靠座椅后枕,抬起右手行礼,这是向起飞助理示意可以起飞。” 战斗机在航母上起飞,离不开航母特装人员的紧密配合。仅完成起飞动作,就需要65个流程,任何一个流程都容不得差错。在着舰起飞过程中,飞行员无法感知外界因素。“因此,
我们的手势要求及时、准确、规范。”有关人士称,“为了达到这个要求,大家都刻苦练习,经常累得手都抬不起来。” 图为俄罗斯海军舰载机起飞时,起飞助理的手势,请注意他只是站起身做了一个简单的手势。 图为美军舰载战斗机起飞,当飞行员敬礼表示准备妥当,弹射指挥官面向前面,再转身对着飞机,蹲下,手向前指,他的手按在甲版上的同时,发射员按下发射按钮,弹射器压力快速加大,扣在前起落架后面的扣子松开,飞机在剎那间向前冲。 舰载机准备着舰前,身着七种颜色服装的舰面人员排着紧密的两行队形,从飞行甲板一端走向另外一端反复检查甲板,如同七色彩虹在甲板上延伸。 在舰面上,各战位的人员都身着五颜六色的服装,这与传统军舰上统一颜色的着装要求产生了极大的差别。“你看,这些官兵头盔、马甲、长袖套衫的不同颜色以及他们背后不同的图案和符号,表明了他们的战位和职责,外行看起来,仿佛在甲板上看到了七彩的‘彩虹’,因此我们也称之为‘甲板彩虹服’。”李晓勇详细介绍了每一种颜色的含义,“紫色代表燃油
建模与仿真
第1章建模与仿真的基本概念 参照P8例子,列举一个你相对熟悉的简单实际系统为例,采用非形式描述出来。 第2章建模方法论 1、什么是数学建模形式化的表示?试列举一例说明形式化表示与非形式化表示的区别。 模型的非形式描述是说明实际系统的本质,但不是详尽描述。是对模型进行深入研究的基础。主要由模型的实体、包括参变量的描述变量、实体间的相互关系及有必要阐述的假设组成。模型的非形式描述主要说明实体、描述变量、实体间的相互关系及假设等。 例子:环形罗宾服务模型的非形式描述: 实体 CPU,USR1,…,USR5 描述变量 CPU:Who,Now(现在是谁)----范围{1,2,…,5}; Who.Now=i表示USRi由CPU服务。 USR:Completion.State(完成情况)----范围[0,1];它表示USR完成整个程序任务的比例。参变量 X-----范围[0,1];它表示USRi每次完成程序的比率。 i 实体相互关系 (1)CPU 以固定速度依次为用户服务,即Who.Now为1,2,3,4,5,1,2…..循环运行。 X工作。假设:CPU对USR的服务时间固定,不(2)当Who.Now=I,CPU完成USRi余下的 i X决定。 依赖于USR的程序;USRi的进程是由各自的参变量 i 2、何谓“黑盒”“白盒”“灰盒”系统? “黑盒”系统是指系统内部结构和特性不清楚的系统。对于“黑盒”系统,如果允许直接进行实验测量并通过实验对假设模型加以验证和修正。对属于黑盒但又不允许直接实验观测的系统,则采用数据收集和统计归纳的方法来假设模型。 对于内部结构和特性清楚的系统,即白盒系统,可以利用已知的一些基本定律,经过分析和演绎导出系统模型。 3、模型有效性和模型可信性相同吗?有何不同? 模型的有效性可用实际系统数据和模型产生的数据之间的符合程度来度量。它分三个不同级别的模型有效:复制有效、预测有效和结构有效。不同级别的模型有效,存在不同的行为水平、状态结构水平和分解结构水平的系统描述。 模型的可信度指模型的真实程度。一个模型的可信度可分为: 在行为水平上的可信性,即模型是否重现真实系统的行为。 在状态结构水平上可信性,即模型能否与真实系统在状态上互相对应,通过这样的模型可以对未来的行为进行唯一的预测。 在分解结构水平上的可信性,即模型能否表示出真实系统内部的工作情况,而且是惟一表示出来。 不论对于哪一个可信性水平,可信性的考虑贯穿在整个建模阶段及以后各阶段,必须考虑以下几个方面: 1在演绎中的可信性。2在归纳中的可信性。3在目的方面的可信性。 4、基于计算机建模方法论与一般建模方法论有何不同?(P32) 经典的建模与仿真的主要研究思路,首先界定研究对象-实际系统的边界和建模目标,利用已有的数学建模工具和成果,建立相应的数学模型,并用计算装置进行仿真。这种经典的建
舰载机着舰训练
舰载机有固定翼飞机和旋翼飞机,这里要谈到的舰载机着舰是指固定翼飞机。大家知道,舰载飞机的起降主要以航空母舰为基地,那么它就需要适应航母这个海上“移动的陆地”。在此,拟通过对舰载飞机着舰过程与陆基飞机着陆过程的分析比较,一窥舰载机着舰的突出特点,以及整个着舰过程对各种主要相关结构、装置、设施的特殊要求。 “移动的陆地” 说到舰载机,我们不妨先简单谈淡航空母舰。航空母舰出勤时,是一个海上六自由度运动的平台,它不仅在海平面上作平面运动,而且在海浪的作用下还会产生纵向和横向的摇动以及升沉运动。航母上的大气紊流情况也比较复杂,除了陆地机场通常存在的大气紊流以外,由于航母庞大的舰体以及自身的运动还会在舰首产生上洗气流,并在舰尾处形成较强的公鸡尾状的尾流。另外还需要特别指出的是,航母虽然庞大,但是可供舰载机起飞、着舰的跑道长度是很有限的。目前世界上大型的航母甲板总长度也不过300多米,而能够提供舰载机起飞、着舰使用的只有其中的100米左右。如美国的“尼米兹”级航母首舰“尼米兹” 号航母,该舰长332.1米,宽40.8米;飞行甲板长338,8米,宽76.8米。 图集详情:舰载机着舰航母相当于每小时300公里坠毁在航母甲板上,每一次降落和起飞都是一次生命的挑战,都是对舰载战斗机飞行员从身体极限、飞行技术、意志品质、到心理素质的极端考验。航空母舰 (以下简称“航母”) 是一种巨大而复杂的海上作战平台, 是海上移动的机场。飞机着舰与着陆的物理环境有很大差别, 主要表现在甲板尺寸受限, 航母处于运动状态, 存在甲板风和舰尾气流以及驾驶员的视景受限。正是这些差别, 使得飞机着舰难度更大, 不安全因素更多, 撞机、撞舰、坠海事故时有发生。因此, 着舰安全一直是世界各国航母发展和使用中的重大课题。(来源:环球网) 危险性和复杂性 飞机的起飞着陆通常是事故多发状况,而舰载机的着舰比陆基飞机着陆还具危险性和复杂性。首先,舰载机着舰进场速度小,受舰上扰流因素影响相对较大,客观上使得舰载机轨迹稳定性变差。然而舰载机着舰条件要求反而相对苛刻(如前所述:着舰可用甲板长度有限,作为着舰平台的航母自身是六自由度运动体,以及出舰海上作战的技战术要求等),恰恰又要求飞机进舰下滑时的轨迹稳定性比陆基飞机还要高,这个矛盾对舰载机初期的发展形成了较大的制约。60年代以前,舰载机着舰的事故率是很高的,以后随着着舰下滑引导技术及其它辅助着舰技术的发展,事故率才有所下降,但相比陆基飞机着陆事故率仍然较高。舰载机在下滑着舰时,对垂直平面内下滑航迹控制要求很高,而气流、海面状况等一些客观不确定
舰载机着舰导航与定位技术
舰载机着舰导航与定位技术 郝帅,程咏梅,马旭,王小旭 (西北工业大学自动化学院,陕西西安710072) 摘要:首先介绍了舰载机的重要性及舰载机安全着舰的困难性、复杂性,并详细论述了早期舰载机所使用的着舰技术,其中包括人工着舰引导和光学助降技术。然后对舰载机安全着舰的关键技术——舰载机导航和定位技术进行了分析,其中主要包括舰载机捷联惯导传递对准、组合导航,以及舰载机相对航母雷达的跟踪定位、视觉辅助定位等技术,并总结了目前国内外对舰载机导航和定位技术的研究成果及动态。最后,指出了舰载机着舰导航与定位技术未来的研究方向。 关键词:舰载机;着舰技术;导航与定位;视觉导航;组合导航 中途分类号:U666.1 文献标识码:A Carrier-based Aircraft Landing Navigation and Positioning Technology HAO Shuai,CHENG Yong-mei,MA Xu,W ANG Xiao-xu (College of Automation, Northwestern Polytechnical University, 710072, Xi’an, China) ABSTRACT:First, the importance of carrier-based aircraft and difficulty, complexity of safe landing technology are introduced and the early landing technique is introduced in detail, including artificial landing guidance and optical auxiliary landing technology. Then carrier-based aircraft safe landing key technology is analyzed which includes carrier-based aircraft landing navigation and positioning technology. The research content mainly includes the strapdown inertial navigation transfer alignment technology of carrier-based aircraft, integrated navigation, tracking and location of carrier-based aircraft relative to aircraft carrier radar and visual auxiliary positioning. And research result and status of carrier-based aircraft navigation and positioning are concluded. Finally, carrier-based aircraft landing navigation and positioning technology in the future is pointed out. KEYWORDS:carrier-based aircraft; landing technology; navigation and positioning; vision-based navigation; integrated navigation 1 引言 航空母舰是当今世界上拥有最强大综合战斗力的海上“钢铁堡垒”,拥有全面的作战打击能力,凭借舰载机的强大作战能力可以使舰队的作战半径扩大到数百公里,对压制敌方空中和海上力量有着重要意义。舰载机飞行员被认为是从事世界上最危险的职业,当舰载机执行完作战、训练、侦查等任务后,安全顺利着舰是件惊心动魄的工作,在广袤无垠的大海上航空母舰犹如一片树叶,所以想在有限的空间内安全着舰对飞行员个人技术及生命都是巨大的挑战。与陆基飞机着陆相比,舰载飞机在甲板上着舰更为困难,这是因为航空母舰是一个长度有限的海上浮动平台,当舰载机下滑着舰时,对垂直平面内下滑航迹控制要求很高,而气流、海面状况等一些客观不确定因素,以及航母着舰引导、飞行员驾驶等也存在主观不确定因素,这些都可能导致航迹控制不当而未能在预定着舰点着舰,最终导致着舰失败,甚至引发严重事故。 舰载机着舰过程如图1所示。图中的着舰方式为目视着舰,能见度超过5千米以上。当舰载机进行着舰时,在航母上空按长方形航线进行左回旋飞行,此时的航母位于长方形的右边线的中心,记为PL1;第二、三、四个边线中心分别记为PL2、PL3和PL4。 图1 舰载机着舰示意图 基金项目:研究得到航空科学基金资助(项目编号:20100853010)。
制造系统建模与仿真知识点1
知识点1 1. 在查阅资料的基础上,了解系统建模与仿真技术在经济建设、新品研发、企业运作以及 社会发展中的功能与作用,包括: ①系统建模与仿真技术在制造企业规划与运营中的应用,如企业选址、车间布局、生产线 平衡、瓶颈分析等。 ②系统建模与仿真技术在工程开发中的应用,如三峡大坝建设、机场选址、城市及区域规 划、大型体育设施建设等。 ③系统建模与仿真技术在工业产品研制中的应用,如长征火箭、神舟飞船、军用及民用飞 机研制、高铁列车开发、汽车产品研制等。 ④系统建模与仿真技术在社会服务系统中的作用,如商业服务企业选址、医院选址与布局、 商业设施的布局规划、游乐设施规划布局、公交线路布点及班次优化等。 ⑤系统建模与仿真技术在物流系统中的应用,如物流企业选址、配送中心选址与布局、物 流系统规划开发、物流设备研制等。 ⑥围绕具体产品(如汽车)或系统(如载人航天工程),分析系统建模与仿真技术的具体应 用。 2.什么是系统,它有哪些特点?结合具体的制造系统、物流系统或服务系统,分析系统的组成要素、功能和边界。 3. 什么是制造系统?它有哪些特点?常见的制造系统有哪些类型? 4. 什么是机械制造系统,它具有哪些特点?简要分析机械制造系统的运行过程。 5. 以机械制造系统为例,分析此类系统运作的基本特点,系统与环境之间存在哪些交互作 用? 6. 在查阅资料的基础上,以汽车整车制造企业为例,分析此类系统中物料流、能量流和信 息流涵盖的内容。 7. 以家用电气产品(如电视机、冰箱、手机等)制造系统为例,分析此类系统在设计及运 行过程可能存在的各类动态和随机性因素。 8.什么是连续系统和离散系统,它们存在哪些区别。结合具体案例,分析连续系统和离散系统分别具有哪些特点。 9.分析系统、模型与仿真三者之间的关系。对系统而言,建模与仿真技术具有哪些作用?10.对制造系统而言,哪些方法能够分析此类系统的性能,它们各具有什么特点?为什么计算机仿真技术的应用越来越普遍? 11. 与实物试验相比,基于模型的试验具有哪些优点? 12. 总体上,系统模型可以分为哪些类型?简要分析每类模型的特点,并给出具体案例。13.制造系统的建模与仿真具有哪些特点? 14. 对制造系统而言,仿真研究的目标可以分为哪几种类型? 15. 分别从“设计决策”和“运行决策”的角度出发,分析仿真技术可以为制造系统设计及运行 提供决策支持。 16. 仿真技术本身具有优化系统设计的功能吗?为什么?试解释之。 17. 在查阅资料的基础上,比较仿真技术与运筹学方法的异同之处。 18. 从建模和仿真研究的角度,机械制造系统建模和仿真时通常涉及哪些类型的建模元素? 19. 以制造系统及物流系统为对象,在查阅资料的基础上,了解下列术语在系统性能评估中 的作用,分析仿真技术与它们之间的关系。 ⑴系统(system)
一着惊海天——目击我国航母舰载战斗机首架次成功着舰 优秀教案
一着惊海天——目击我国航母舰载战斗机首架次成功着舰 【学情分析】 八年级的学生是第一次学习通讯,在教学中老师除了帮助学生了解新闻“六要素”以外,还需要求学生了解消息和通讯的区别,感受通讯独特的写作特点。同时八年级的学生已具备一定的阅读能力,所以要更进一步培养学生的阅读能力。 【教学目标】 ①能根据新闻的结构理清内容、层次,初步感知通讯语言的准确、简洁。 ②学习文章的写作方法,赏析文章的精彩语段。 ③培养学生的爱国热情和民族自豪感。 【教学重难点】 ①学习文章写作方法,赏析文章的精彩语段。 ②培养学生的爱国热情和民族自豪感。 【教学方法】 ①圈点勾划法:预习生字词,在文中圈点勾划重点词句。 ②查阅资料法:查阅有关辽宁舰的资料以及“航母战斗机英雄试飞员”戴明盟的资料。 ③讨论探究法:品味文章的语言特色时,运用自主、合作、探究的学习方式,来解决课堂教学中出现的教学重难点。 【教学过程】 (一)导入新课 1.老师展示辽宁舰舰载机起降视频和辽宁舰的相关图片资料。 2.同学们!在观看完我国“辽宁”舰航母舰载机首架次着舰成功的视频后,你们有什么感想呢?(学生讨论并发言) 分享完大家的感想后,老师想说我国“辽宁”舰航母舰载机首架次着舰成功的现场,记者亲身感受并记录了这一精彩感动的瞬间,让我们走进今天的课文《一着惊海天》,一起去感受我们祖国伟大的军事力量。 (二)整体感知 1.教师检查预习情况
(1)学生对重点字词的落实情况。 (2)学生对课文的预习效果以及相关资料的查阅情况。 2.学生快速浏览课文,用简明的语言概括本文的主要内容。 讨论并归纳:本文记叙了我国“辽宁”舰航母舰载战斗机首架次着舰试验并取得重大成功的过程。 3.能根据新闻的结构理清内容、层次,初步感知通讯语言的准确、简洁。 (1)(1—4):介绍了时间、地点及事件的重要意义和风险。 (1—2):检查甲板,做好着舰前最后一次准备。 (3—4):交代这次舰机着舰的重要意义和风险。 (2)(5—19):详细报道了舰载机成功着舰的过程。 (5—16):记叙了舰、机默契配合。 (17—19):展现了舰载机成功着舰。 (3)(20—27):描写了舰载机着舰成功的重大意义以及人们的激动喜悦心情。 (三)问题探究: 1.声如千骑疾,气卷万山来。惊心动魄的一幕出现了:9时08分,伴随震耳欲聋的喷气式发动机的轰鸣声,眨眼之间,舰载机的两个主轮触到航母甲板上,机腹后方的尾钩牢牢地挂住了第二道阻拦索。刹那间,疾如闪电的舰载机在阻拦索系统的作用下,滑行数十米后,稳稳地停了下来。(试从表达技巧和表达效果的角度来进行赏析) 答案示例: (1)运用细节描写,生动形象地描写舰载战斗机着舰时的情景。 (2)运用对偶和比喻的修辞手法,“声如千骑疾,气卷万山来”生动形象地表现了战斗机着舰时的浩大声势,同时增强文章气势,具有感染力。 思路解析:此句的解析可以从两个方面来进行分析:一是表达技巧,抓住本句的一些关键词进行赏析:从“震耳欲聋”、“轰鸣”、“眨眼之间”、“刹那间”、“疾如闪电”等可以看出作者主要运用了细节描写,从“声如千骑疾,气卷万山来”可以看出作者运用了对偶、比喻的修辞手法。二是分析其表达效果。细节描写的作用在于生动地展示,增强语言的感染力。对偶和比喻的运用在于增强文章气势和使描写生动形象。 2.某大国一名上将曾说:“我们可以把航空母舰送给你们,但是,十年之内,你们不可能让舰载机上舰!”(试从表达效果的角度分析此句在全文中的作用) 答案示例:运用引用的修辞,表现出某国上将对我国海军建设的歧视,暗示当时我国航母舰载机着舰面对的困难之大,同时这也更加激发了我国科研人员自主创新、为国争光的斗志,
生产建模与仿真课设
中北大学移动营业厅排队系统 建模与仿真设计说明书 1、系统描述: 中国移动营业厅是顾客购买中国移动通信产品和体验其服务的直接窗口,是一种大众化的直观营销模式。而中北大学在校师生使用最多的通信业务平台当属中国移动了,所以我研究了我校动感地带营业厅系统,其中有两名业务员提供服务,顾客按照“先到先服务”的排队规则接受服务。在营业厅服务系统中,排队是一个常见的现象,如何能够提高服务效率和服务质量,缩短师生排队等待时间,是我们仿真实验的目的。通过统计顾客到达时间、排队等待时间、接受服务时间,进行建模与仿真,研究动感地带营业厅的运行情况,并提出一些可行性方案。2、系统分析: 2.1 系统的实体分析 我校动感地带营业厅属于一种单队多服务台服务系统,由三种实体组成:业务员、顾客、排队队列。其中,业务员是永久实体,顾客是临时实体,排队队列是一种特殊实体。 2.2实体的状态及活动分析 业务员有“提供服务”和“休息”两种活动,分别对应“忙”、“闲”两种状态;顾客与业务员共同完成服务,有“接受服务”和“等待服务”两种状态;排队队列的状态以队列长度标识。三种实体的活动及状态之间有一定的逻辑关系。 2.3实体的状态变化分析 当顾客到达营业厅时,先抽取服务号码,如果业务员处于“忙”状态,则进入“等待服务”状态,否则,进入“接受服务”状态。 处于排队等待状态的顾客,如果业务员完成了对前一个顾客的业务服务,则进入“接受服务”状态;否则,继续保持“等待服务”状态。 业务员完成对顾客的业务服务后,如果排队队列处于“非零”状态,则立即开始下一个服务,进入“忙”状态,否则,进入“闲”状态。 2.4系统的事件分析 顾客:到达并抽取服务号码、结束排队、顾客服务完毕离去。
建模与仿真习题集
1. 以下关于神经元功能的表述中错误的是(A) A.时变特性 B.输出与输入之间有固定的时滞,取决于突触延搁 C.神经元有一定的阈值,并表现适应性 D.时间和空间加和 2.根据心肌缺血的严重程度和梗塞心肌的电气特性,可以将梗塞心肌分为三种类型,以下哪一个错误(B) A.坏死型心肌 B.病理型心肌 C.损伤型心肌 D.缺血型心肌 3.皮肤的散热可分为生理散热和物理散热,生理散热可分为血管运动和汗腺活动。 4.体温控制规律(即控制系统定律)的表达式为R—R0=—k(Ty—Ts). 5.已知呼出气体的容量Ve等于吸入气体的容量V1减去耗氧量Vo2加上二氧化碳的产生量Vco2;耗氧量等于吸入气体的氧容量减去呼出气体的氧容量(Fio2,Feo2分别表示吸入,呼出气体中的O2浓度的百分数);CO2产出量等于呼出气体的CO2容量减去吸入气体的CO2容量(Fico2,Feco2分别为吸入,呼出气体中的CO2浓度的百分比,吸入气体中的CO2可忽略不计),求耗氧率?
解: Ve=V1--Vo2+Vco2 耗氧量 Vo2=Fio2 *V1--Feo2 *Ve CO2产出量 Vco2=Feco2 *Ve 联立以上三式,对时间求导,得 把V1代入耗氧量公式,求的耗氧率 1.以下不是系统概念特性的是(D) A.整体性 B.抽象性 C.模型性 D.具体性 2.人们将人体视为有三个不同层次的同心圆柱体,由里向外分别为体核,肌肉脂肪组织,皮肤,其中热容量最大的是(A) A.体核 B.肌肉脂肪组织 C.皮肤 3.写出体温控制规律(R-R0=-k(Ty-Ts)) 4生理系统建模中常用的工程方法(用频域法解线性微分方程)(系统辨识)(方式分析) 5.下图为电路的频域表示,其中各参数都采用了频域表示,求V0(t)
《生产物流系统建模和仿真》课程设计报告
《生产物流系统建模与仿真》课程设计 2012-2013学年度第一学期 姓名孙会芳 学号 099094090 班级工093 指导老师暴伟霍颖
目录 一、课程任务书 (3) 1.题 目............................................................... (3) 2.课程设计内容 (3) 3.课程设计要求 (4) 4.进度安排 (4) 5.参考文献 (4) 二、课程设计正文 (5) 1、题目 (5) 2、仿真模型建立 (5) (1)实体元素定义 (5) (2)元素可视化的设置 (6) (3)元素细节设计 (8) (4 ) 模型运行和数据.................................................................. . (10) (5)模型代码 (12) (6)模型改进 (16) 3.实验感想 (17)
三、参考文献 (18) 《生产物流系统建模与仿真》课程设计任务书 1. 题目 离散型流水作业线系统仿真 2. 课程设计内容 系统描述与系统参数: (1)一个流水加工生产线,不考虑其流程间的空间运输。 (2)两种工件A,B分别以正态分布和均匀分布的时间间隔进入系统,A进入队列Q1, B进入队列Q2,等待检验。(学号最后位数对应的仿真参数设置按照下表进行) (3)操作工人labor1对A进行检验,每件检验用时2分钟,操作工人labor2对B进行检验,每件检验用时2分钟。 (4)不合格的工件废弃,离开系统;合格的工件送往后续加工工序,A的合格率为65%,B的合格率为95%。 (5)工件A送往机器M1加工,如需等待,则在Q3队列中等待;B送往机器M2加工,如需等待,则在Q4队列中等待。 (6)A在机器M1上的加工时间为正态分布(5,1)分钟;B在机器M2上的加工时间为正态分布(8,1)分钟。
学习笔记——舰载机进舰着舰过程仿真建模_王延刚
舰载机进舰着舰过程仿真建模_王延刚 收稿日期:2007-07-17 修回日期:2008-11-24 第20 卷第24 期系统仿真学报 摘要:航母—舰载机—起落架,多体动力学系统,进舰着舰系统仿真模型,驾驶员和LSO 的行为特征,考虑风场扰动,海浪等因素。该模型不仅适于航母-舰载机适配性问题,还可研究进舰着舰任务中LSO 对驾驶员行为的影响。通过仿真示例验证该模型的合理性和可行性。引言:首先介绍舰载机进舰着舰的基本过程,并从飞行动力学的角度出发,阐述涉及的相关问题,然后对仿真系统各模块进行分析,并提出相应建模方法,最后给出数字仿真结果,以验证其合理性。 1、舰载机进舰着舰过程描述 ?菲涅尔透镜光学助降系统(Fresnel Lens Optical Landing System, FLOLS); ?舰载机沿下滑道保持大约-3.5°的航迹角下滑; ?平行于下滑道的5层光束,最中间为橙色,为理想航迹; ?LSO综合甲板运动、飞机特性、驾驶员技术要求调整飞行状态或者复飞。 ?常规飞机着陆:拉平;舰载机:助降系统引导,撞击式着舰,通过拦阻系统强制飞机在50——70m内减速止动,有时LSO警告驾驶员做逃逸机动。 2、建模方法 2.1航母运动建模 ?海上运动包括前向行驶运动和海浪造成的扰动运动,工程实践中,前者按定常直线运动处理,而后者采用平稳随机过程理论描述。 ?文献[10]提供一种拟合窄带平稳随机过程频谱的实用有效的工程方法——成形滤波器法,以白噪声输入一个拟合的航母运动近似传递函数,得到航母扰动运动,再叠加航母行驶运动最终得到用于仿真的舰船运动。 图1舰载机着舰示意图 2.2航母扰流建模 ?航空母舰扰流的模拟方式有频域法、数据库法和工程化方法三种,仿真模拟较为普遍采用的是第三种方法。 ?该方法主要是根据航母扰流的物理特性和成因建立模型,以美军标1797A推荐的模型较为完善,给出的航母舰尾流(包括稳态分量、自由紊流分量、周期性分量以及随机分量)扰动速度的空间分布,能满足工程需要。 ?航母舰尾流(包括稳态分量、自由紊流分量、周期性分量以及随机分量),同舰尾流对舰载机着舰轨迹和动态响应的影响研究_胡国才中舰尾流模型一致。
业务流程建模仿真功能介绍_new
业务流程仿真功能说明 一、总述 业务流程仿真工具是由清华大学自动化系集成化企业制造实验室开发完成的,基于工作流理论的仿真系统。使用业务流程仿真系统可以针对实际物流、制造、生产等流程进行模型的构建及过程仿真,得到拟实仿真结果,通过分析资源利用率、活动排队、成本等数据,对实际排产、流程优化提供必要参考。 业务流程仿真工具与集成化企业建模工具直接集成,流程、资源、组织的建模和资源的配置工作在建模平台中完成,而业务流程仿真工具可以提供仿真场景配置、仿真运行展示以及仿真结果输出和展示的功能。以下各部分分别针对各部分功能进行简单介绍。 二、仿真配置功能 仿真配置是进行业务流程仿真的第一步骤,只有进行了正确的配置,业务流程仿真才能得到正确、有效、接近实际情况的结果。在仿真配置中,仿真者需要对业务流程、资源(组织)以及仿真场景等内容进行配置。以下分别对各部分的配置内容进行介绍。 1.业务流程建模及配置 1)过程视图 业务流程配置在集成化建模工具的建模窗口中完成,通过对实际的业务流程进行抽象,使用活动网络图的方式表现并建模。当前业务流程仿真工具中,可以提供开始节点、结束节点、活动节点、过程节点、与节点、或节点、异或节点、决策节点等。在建模窗口中可以完成相应的业务流程图过程视图建模。 在完成业务流程过程视图建模后,可以针对不同的节点配置对应的仿真数据。比如对于活动节点,要设置活动完成时间的长度,这个长度可以是正态分布、常数、指数分布等,同时,还要将活动引用的资源和人员添加进活动的资源列表和人员列表,包括使用的资源和人员的类型以及数量。 2)资源、人员数目设置 在资源、组织视图中,添加相应的资源,并为其设置资源名、资源类型、资源数目等,同时在组织视图中添加相应的人员,并为人员分配职位、角色等。这些资源作为仿真所使用的资源库,与实际的情况相对应。 2.仿真场景设置
制造系统建模与仿真知识点
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
系统建模与仿真(2)
第九讲系统建模与仿真(2) 四、仿真 1. 仿真(模拟)(Simulation)概念 1)定义 利用模型复现实际系统中发生的本质过程, 并通过对系统模型的实验来研究存在的或设计中的系统. 2)分类 物理仿真:即实物仿真, 如风洞 计算机仿真(数学仿真): 模拟数字混合 半实物仿真: 控制器(实物)+计算机上实现的控制对象 3)建模、仿真与计算机 建模与仿真的五个组成部分(实际系统、试验框架、基本模型、集总模型、计算机模型)
实际系统:行为描述(可观测变量、不可观测变量) 试验框架:假设或条件集合,同模型有效性之间相关 基本模型:在试验框架下,解释实际系统的行为 集总模型:基本模型的简化 计算机:复杂(仿真) 4)基本要素 ●对仿真问题的描述 ●行为产生器 ●模型行为及其处理 5)仿真的发展阶段 ●模型驱动的仿真 ●含实物的仿真 ●人在回路中的仿真 6)仿真的发展趋势 ●面向对象仿真 ●定性仿真 ●智能仿真 ●分布交互仿真 ●可视化仿真 ●多媒体仿真 ●虚拟现实仿真 ●Internet网上仿真
7)仿真的对象 ●系统过于复杂(如存在过多的随机因素),难以采用解析法求解 时,通过仿真可得到系统的动态特征。 ●系统实际运行费用过高或无法作实际运行时,借助仿真可以得到 系统的有关参数。 优化设计、安全性和经济性、预测、完善系统模型、重复实验 8)仿真的一般过程 9)仿真的分类
●物理仿真,模拟机仿真,数字仿真,数字机与模拟机混合仿 真,仿真器仿真 ●连续和离散系统仿真 ●静态和动态系统仿真 ●稳态和终态仿真 ●确定性和随机性仿真 10)仿真的输出类型 ●确定型和随机型 ●连续观测值和离散观测值 ●连续分布和离散分布观测值 ●一元和多元输出 ●稳态型仿真和终止型仿真输出 11)仿真的局限性 1) 往往只能得到特解,而得不到通解 2) 结果往往是间接的,而不是直接的 12)仿真的技术工具 连续系统仿真:DYNAMO, CSMP 离散事件系统仿真:GPSS, SIMSCRIPT, SIMULA, GPSS-F 混合仿真:GASP-IV
简单说一下舰载机着舰的过程
简单说一下舰载机着舰的过程 为了保证舰载机能够正确的返航和着舰,一般航母都配备有战术空中导航系统、空中交通管制系统和着舰引导系统多个系统,对舰载机进行引导,在现代航母上,这些系统已经能够通过数据总线有机相接,形成综合导航和引导系统,同时还可以与航母编队指挥与战术数据处理系统进行联接,实现资源的共享和作战、归航等作业的更好的协调,一航而言,航母的战术空中导航系统在300公里左右为归航的舰载机提供指挥引导,到了距离母舰100公里处,由空管雷达接手,对返航的飞机进行编组,确定着舰的顺序,然后舰载机进入等待着舰阶段,舰载机按进场队形逆航母前进方向平行于航母的右舷飞行,然后转弯飞跃舰艏,转入顺风段,一直到距离航母大约30公里,在这个阶段由航母上的战术空中导航系统进行引导,到达距离母舰大约10公里处,由舰上的自动着舰系统开始引导,一直到距离母舰大约3公里处,进入舰上光学助降系统工作区域,然后据此着舰,由此可见舰载机着舰短短数分钟内,涉及到众多的系统、人员,要想相关系统和人员能够快速、熟练的工作,需要频繁的训练和演练。 舰载机着舰基本方式是目视方式,主要用于晴朗气象、能见度好的情况下,飞行员进入等待区后,由航母飞行指挥控制室引导,进入等待航线,这个航线是一个直径为5海里的逆时针圆形航线,不同的飞机等待高度不同,最低的等待高度大约在600米左右,舰载机每次经过航母上空的时候,与着舰指挥官进行联系,以便获得着舰许可,考虑到有些飞机执行任务回来后有可能燃料不足,所以在高空还安排了加油机给燃料不足的飞机进行空中加油,在接收到着舰的命令以后,舰载机在距离母舰10公里左右的地方脱离等待航线,高度下降到300米左右,航母后方5公里处进入着舰航线,然后根据着舰飞机的多少,以水平转弯曲或者盘旋动作进入下滑航线,进入下滑航母前,舰载机需要关闭武器系统,确认飞机的重量符合航母着舰的标准,然后打开减速板、放下拦阻钩及起落架等,表示要着舰,飞机在航母左侧一海里外,再次转弯,到达着舰中心延长线的后方,进入光学助降系统的工作范围,然后开始下滑降落。如果气象不佳,如云层高度较低,那么飞机在进入航母战术空中导航系统的作用范围后,由后者进行引导至距离航母大约15公里处,如果能够目视发现航母,则转入目视着舰方式,如果气侯条件恶化,则进入全自动着舰系统引导模式。在这个模式下,可以允许舰载机的方位与母舰有大约30度的偏离,等待航线飞行大约需要6分钟,其中两个180度转弯需要1分钟,两边飞行各需要2分钟,当飞机被航母精密跟踪转达截获以后,即 可转入全自动引导着舰模式。 自动着舰系统有多种工作模式,可以供飞行员或者着舰指挥官进行选择或者切换,其中模式1是全自动着舰模式,它是利用数据链联接航空母舰和舰载机,由后者根据前者传递来的信息进行自动着舰,需要指出的是航母自动着舰的控制信息不是由航母上的作战中心发出的,而是由航母空中交通控制中心负责,目前美国航母空中交通控制中心凭借数据链可以同时控制2架飞机在相隔30秒钟内相继在航母上着舰,需要指出的是美国航空自动着舰系统采用的数据链并不是现在美国海军和空军大量装备的LINK-16,而是上一代LINK-4A型数据链,并且在工作中中使用LINK-4A的单向通信模式,实际上美国研制数据链的最初目的就是为自动着舰配套,随着LINK-16数据链的完善和发展,预计2015年以后,LINK-4才会完全被LINK-16所替代。模块2与模式1基本上相同,只是在距离母舰1公里左右之后,舰载机开始接受光学助降系统的引导,模式3属于所谓的半自动着舰方式,在这种方式下,自动着舰系统与舰载机的自动着舰系统并不交联,而是通过仪表或者显示器向飞行进行显示相关数据,由飞行员根据这些信息操纵飞机下滑着舰,最后一种是人工方式,由着舰指挥官观察雷达显示屏,对舰载机位置进行确定,然后获得舰载机的方位和高低角误差,然后用语音告诉飞行员进行修正,直到转动光学助降系统的工作范围,进入新世纪美国海军对于自动着
物流系统建模与仿真软件简介
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。