MA AB中的abc dq相坐标变换
坐标变换总结
姓名:
日期:2011.11.4
坐标变换的总结
一.由三项坐标系变换到两相旋转坐标系
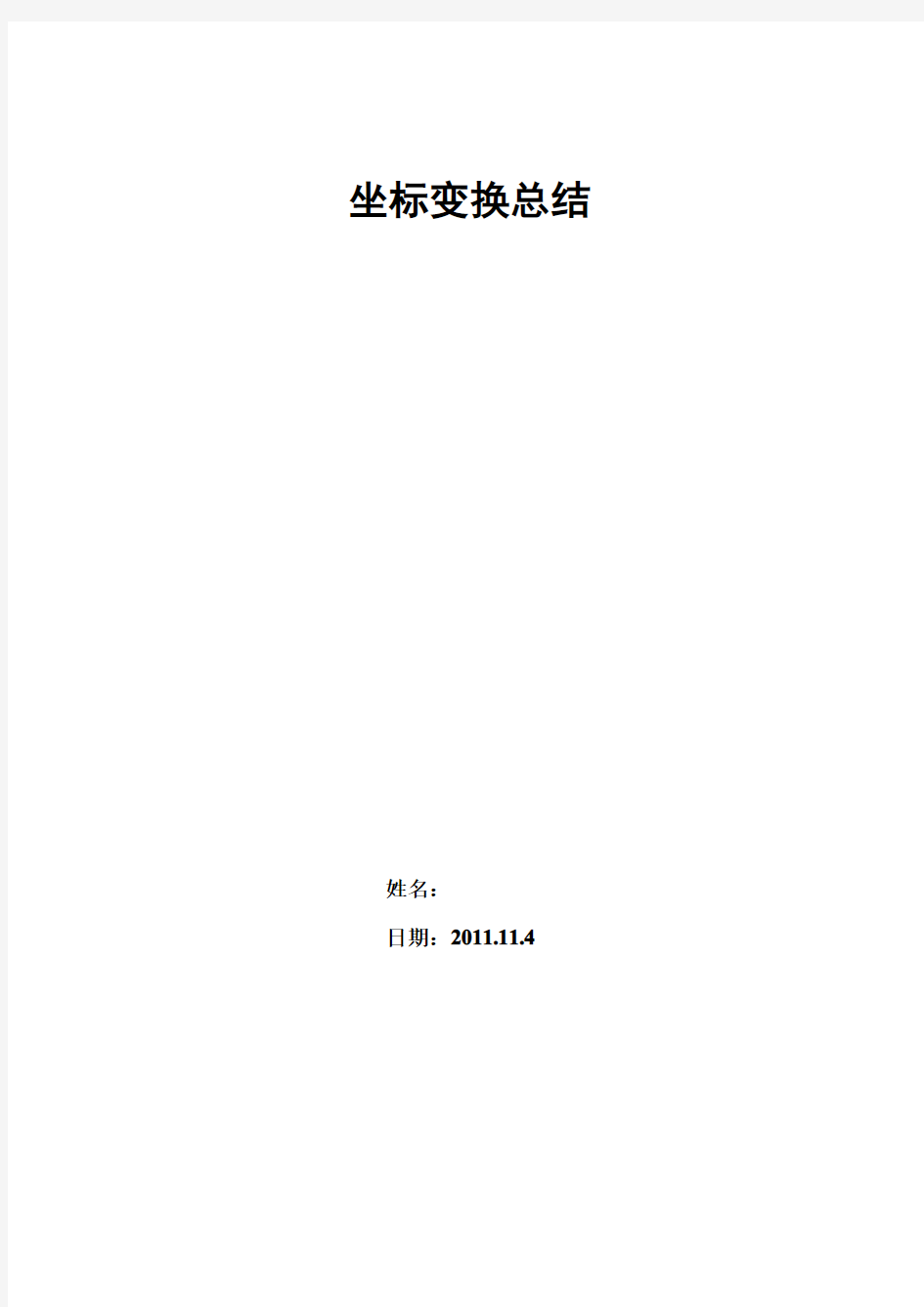
1.三相到两相静止坐标系的变换首先,确定三相电压的相序:
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-
在坐标图上表示三相到两相静止坐标系上的变换,如图所示:
图13-2s 变换
由上图,我们可以将A u 、B u 、c u
转化到两相静止坐标系上,具体等式如下:
211()3222()322A B C B C u u u u u αβ?=--????=-??
插入系数2、
3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:
1112223022A B C u u u u u αβ????--
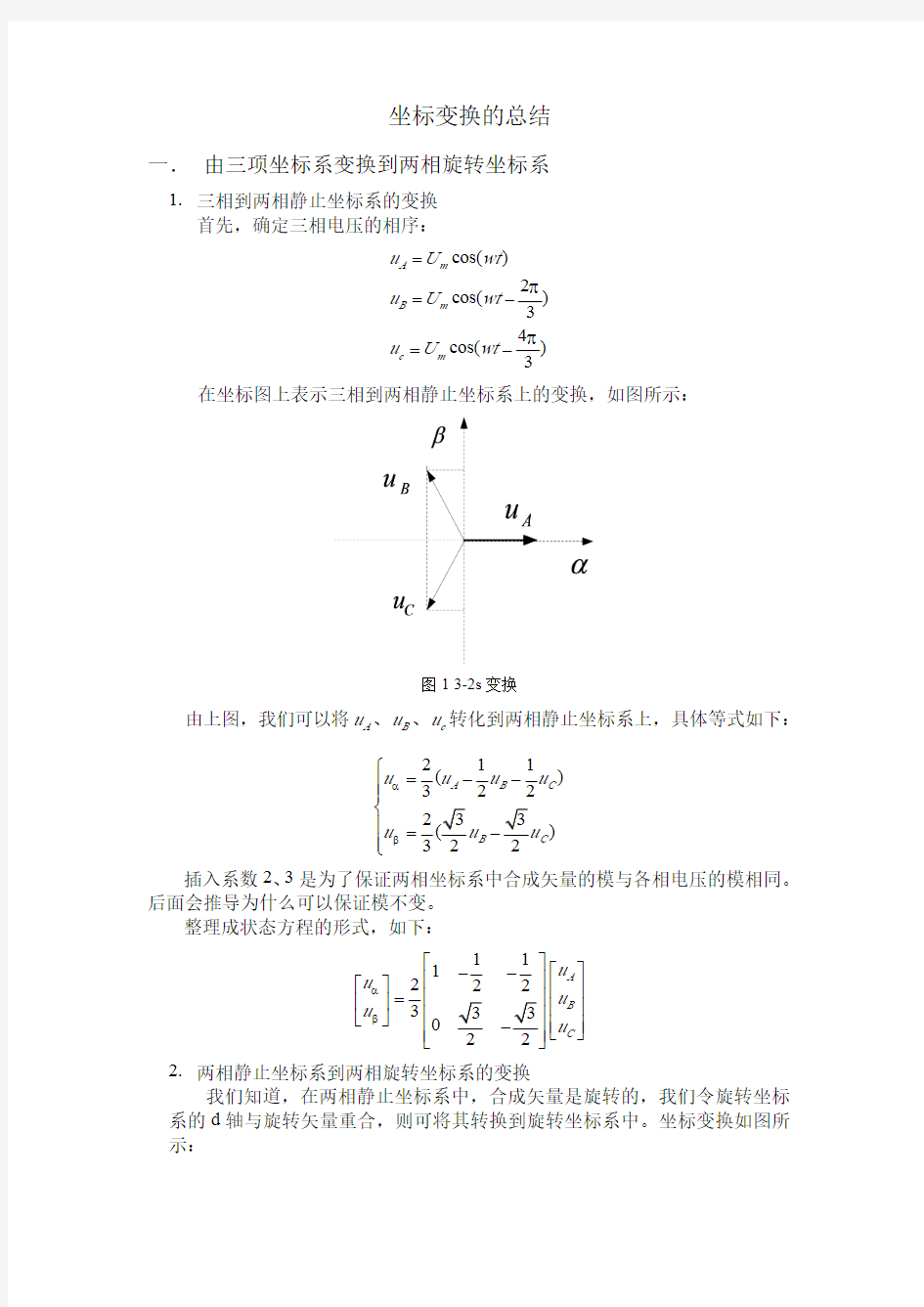
???????=?????????-??????2.两相静止坐标系到两相旋转坐标系的变换
我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。坐标变换如图所示:
图22s-2r 变换
此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。
cos sin sin cos d q u u u u αβθθθθ??????=??????-????
??二.反向变换
1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即
可,根据图二,我们可以得到:
cos sin sin cos d q u u u u αβθθθθ????-??=????????????
2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换:
102133221322A B C u u u u u αβ??????????????=-???????????????--????
三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-经过变换后:
211()322
A B c u u u u α=--
进而,我们可以推知:
211()322
B A
C U U U U α?
???=--22211()322211(1)32223()32A A A A A A U a U aU U a a U U ??????
=--=--==其中,a=23j e π
。
同理,我们可以求的A
q U jU ??=-即
cos()
cos(2d A m q m u u U wt u U wt π
===-合成矢量
sin t cos cos()cos()2
d q
m m t
jarc g t m U u ju U wt jU wt U e ωωπ
=+=+-=显然,此时空间相量的模和时间相量的模相等。
至于为什么要保持模不变,我没找到相关的说明,谈一下我的理解。如果只考虑坐标变换的话,那么乘不乘这个系数并没有什么实际意义,也就是说,之所以乘这个系数是为了方便后续模块的使用。在此次实验中,αβ-的输出主要是给SVPWM 使用。而6个扇区的参考量i U 的大小一般取的是直流侧电压。乘以2/3后,合成空间矢量的模就等于输出正弦信号的的模,我们知道输出正弦信号的最大值m U 必然会小于直流侧电压DC U ,这样取值后,在SVPWM 调制时带来的好处就是可以保证在任意扇区两个非零导通时间12PWM t t T +≤.我们知道,当12PWM t t T +=时合成矢量旋转形成一个圆,在该圆内,合成的输出信号为正弦信号,超出这个圆,输出为非正弦信号。也就是说,乘以系数2/3之后,可以保证合成矢量在上述的圆内,保证输出为正弦信号。
四.MATLAB 中的abc-aq 变换
首先,MATLAB 中的电压参考量取得和我们常用的不同,为正弦信号,如下所示:
sin()
2sin()34sin()3A m B m c m u U wt u U wt u U wt ππ==-
=-和我们的相位相差了90度,相应的其dq 轴的选取也和我们不同(实际上MATLAB 中的q 轴和我们的d 轴重合)。我们不关心他具体是怎么变换的,我们更关心他的输出和我们变换方式下的输出是否一致。下面是我的推导过程:1.按照我们的的变换方式,输入为余弦信号,
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-输出为:
224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=
+-+-??????=-----????
在MATLAB 中,输入为正弦信号,和我们的相位相差了90度,其输出为:224sin sin()sin()333224cos cos()cos()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=+-+-????
??=
+-+-????我们知道,在两个变换中,旋转角都是取得A 相的相角,也就是说在MATLAB 的变换中,其相角相当于余弦量的相角加上90度,sin cos 2t t πωω=+,
将该式带入到MATLAB 的输出中,并化简,我们可以得到:
22224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=
+-+-??????=-----????这个表达式和按照我们变换方式变换获得的输出是一致的,也就是说,MATLAB 的dq 相当于将我们的dq 轴旋转了90度,但是dq 本身就是一个旋转的坐标系,因而我们可以认为,这两种方式获得的输出是完全等价的。
另外,在MATLAB 中,为了验证两种变换方式下,控制方式相同,我们可以交换dq 的控制信号,观察实际的控制效果,来证明刚才的结论是否成立。
对于基于电压矢量的控制,如果我们令Iqref=0的话,那么输出电流应该和
电网电压同相位。如果这两种变换方式不等效的话,则电流和电压不可能同相位。按照这种思想,在MATLAB中仿真,得到输出结果如图所示,此时变换输出Iq 与Iqref=0做差,做为PI控制器的输入信号。
而将dq的控制信号交换后,可得下面的输出,也就是说,此时电流和电网电压相位相差了90度。
由上两图可知,两种变换的输出是等效的。
MB中的abcdq相坐标变换
坐标变换总结 姓名: 日期:2011.11.4
坐标变换的总结 一.由三项坐标系变换到两相旋转坐标系 1.三相到两相静止坐标系的变换首先,确定三相电压的相序: cos() 2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==- =- 在坐标图上表示三相到两相静止坐标系上的变换,如图所示: 图13-2s 变换 由上图,我们可以将A u 、B u 、c u 转化到两相静止坐标系上,具体等式如下: 211()3222()322A B C B C u u u u u αβ?=--????=-?? 插入系数2、 3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。后面会推导为什么可以保证模不变。 整理成状态方程的形式,如下: 1112223022A B C u u u u u αβ????-- ???????=?????????-??????2.两相静止坐标系到两相旋转坐标系的变换 我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。坐标变换如图所示:
图22s-2r 变换 此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。 cos sin sin cos d q u u u u αβθθθθ??????=??????-???? ??二.反向变换 1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即 可,根据图二,我们可以得到: cos sin sin cos d q u u u u αβθθθθ????-??=???????????? 2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换: 102133221322A B C u u u u u αβ??????????????=-???????????????--???? 三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序 cos() 2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==- =-经过变换后: 211()322 A B c u u u u α=--
dq坐标变换分析
dq坐标变换的理解 由于dq变换有四种,而不同的书中写的dq变换不一致,应用起来很麻烦。所以为了便于更好理解每一种用法,不至于使用中陷入混乱,特写此报告理清每一种dq变换。 一、滞后无功dq变换结构图 1.1、q轴有功d滞后无功 b c 图1、q轴有功d轴滞后无功(张兴的书) 其中矢量I以电网基波频率 逆时针方向旋转。 如图1可得下列公式:
sin()cos() d m q m m i I i I I θγθγ?=-??=-??=?? cos cos(120) cos(120)a m o b m o c m i I i I i I γγγ=??=-??=+? 解上述两个方程可得: 0cos cos(120)cos(120)2sin sin(120)sin(120)3111222o o q a o o d b c i i i i i i θθθθθθ????-+??????????=-+???????????????? ???? 0sin cos 1sin(120)cos(120)1sin(120)cos(120)1a d o o b q o o c i i i i i i θθθθθθ????????????=--????????????++?????? 1.2、d 轴有功q 滞后无功 相对应的d 轴有功、q 轴滞后无功的换算方法,只需将以上公式的d 、q 对换即可。 二、超前无功dq 变换结构图 2.1、d 轴有功q 超前无功
a b c 图2、d 轴有功q 轴超前无功 如图1可得下列公式: cos() sin() d m q m m i I i I I θγθγ?=-+??=-+??=?? cos cos(120) cos(120)a m o b m o c m i I i I i I γ γγ=??=-??=+? 解上述两个方程可得:
基于dq变换的三相软件锁相环设计_图文(精)
第31卷第4期 电力自动化设备 ElectricPowerAutomationEquipment VoL31No.4Apr.2011 @2011年4,El 基于由变换的三相软件锁相环设计 吉正华1,韦芬卿2,杨海英1 (1.国电南瑞科技股份有限公司,江苏南京210061; 2.国网电力科学研究院,江苏南京210003) 摘要:针对传统锁相环在电压畸变条件下不能获得准确相位的问题,根据软件锁相环(SPLL)原理.提出了一种基于如坐标变换原理获得SPLL线性化模型,并通过PI控制实现的新型三相SPLL。在三相电压不平衡时。利用T/4(T为三相电压周期)延时计算法实现正、负序分量分离,有效地抑制负序分量对相位的影响。通过仿真实验系统,对提出的控制策略在各种电压畸变及三相电压不平衡条件下进行验证。结果表明,该SPLL的动态响应速度快、稳态性能好。并对电压畸变有很强的抑制作用。关键词:软件锁相环:幽坐标变换;畸变电压;正、负序分量中图分类号:TP214 文献标识码:A 文章编号:1006—6047(2011)04—0104—03 0 引言
2Ⅳ相加后得到实际角频率。最后经过一积分环 节,输出即是电网电压的相位0。整个SPLL过程构成一个反馈,通过PI达到锁相目的。SPLL原理图如图l所示。 本文基于如坐标变换原理,通过PI控制,实现三相软件锁相环(SPLL)。但当三相电压不平衡时。负序分量滤波效果不好[1-3_.因此利用T/4(r为三相电压周期)延时计算法实现正、负序分量分离。有效抑制负序分量对相位的影响。最后,模拟市电电压畸变和三相电压不平衡的情况下进行仿真实验,实验结果验证该锁相环性能良好。 1 0 SPLL原理 图1SPLL原理图 Fig.1 PrincipleofSPLL SPLL基本原理[4.5]是将三相输入电压UaUb、Ⅱ。 转换到静止的俚JB坐标系,然后从静止的ap坐标系转换到与三相电压同步旋转的由坐标系,得到交流电压的直流分量/Ld、“。。三相静止坐标系到两相静止坐标系下的数学矩阵为 2 SPLL的控制框图及性能分析 图2为系统控制框图.将锁相误差信号输入PI
PQ变换与DQ变换的理解与推导
PQ变换与DQ变换的理解与推导
一、 p-q 变换与d-q 变换的理解与推导 1. 120变换和空间向量 120坐标系是一个静止的复数坐标系。120分量首先由莱昂(Lyon )提出,所以亦成为莱昂分量。下面以电流为例说明120变换。a i 、b i 、c i 为三相电流瞬时值,120坐标系与abc 坐标系之间的关系为[1]: ?????++=++=++=0 2210212021i i a ai i i ai i a i i i i i c b a 式中a 和2a 分别为定子绕组平面内的120°和240°空间算子,?=120j e a , ?=2402j e a ,上式的逆变换为: ???? ?????++==++=++=*)(31)(31)(31012221c b a c b a c b a i i i i i ai i a i i i a ai i i 可以看出,120变换在形式上与矢量对称分量变换很相似,不过这里的c b a i i i 、、是瞬时值而不是矢量,21i i 、是瞬时复数值,所以120变换亦称为瞬时值对称分量变换。由于是瞬时值之间的变换,所以120变换对瞬态(动态)和任何电流波形都适用,而矢量对称分量法仅适用于交流稳态和正弦波的情况。另外,由于a 和2 a 是空间算子,所以1i 和2i 是空间向量而不是时域里的矢量;所以瞬时值对称分量和矢量对称分量具有本质上的区别。另外,从上式可知,2i 等于1i 的共轭值,所以2i 不是独立变量。 用矩阵表示时,可写成 ??????????=??????????-0211120i i i C i i i c b a ,???? ??????=??????????c b a i i i C i i i 120021 (1-1) ??????????=-11111221120a a a a C ,???? ??????=111113122120a a a a C 此变换矩阵为等幅变换①。 ① 如何理解式(1-1)中的变换矩阵是等幅值变换???
PQ变换与DQ变换的理解与推导
一、 p-q 变换与d-q 变换的理解与推导 1. 120变换和空间向量 120坐标系是一个静止的复数坐标系。120分量首先由莱昂(Lyon )提出,所以亦成为莱昂分量。下面以电流为例说明120变换。a i 、b i 、c i 为三相电流瞬时值,120坐标系与abc 坐标系之间的关系为[1]: ?????++=++=++=0 22 10212 021i i a ai i i ai i a i i i i i c b a 式中a 和2 a 分别为定子绕组平面的120°和240°空间算子,? =120j e a , ?=2402j e a ,上式的逆变换为: ??? ? ?? ???++==++=++=*)(31)(31)(310122 21c b a c b a c b a i i i i i ai i a i i i a ai i i 可以看出,120变换在形式上与矢量对称分量变换很相似,不过这里的c b a i i i 、、是瞬时值而不是矢量,21i i 、是瞬时复数值,所以120变换亦称为瞬时值对称分量变换。由于是瞬时值之间的变换,所以120变换对瞬态(动态)和任何电流波形都适用,而 矢量对称分量法仅适用于交流稳态和正弦波的情况。另外,由于a 和2 a 是空间算子,所以1i 和2i 是空间向量而不是时域里的矢量;所以瞬时值对称分量和矢量对称分量具有本质上的区别。另外,从上式可知,2i 等于1i 的共轭值,所以2i 不是独立变量。 用矩阵表示时,可写成 ??????????=??????????-0211120i i i C i i i c b a ,??????????=?? ??? ?????c b a i i i C i i i 120021 (1-1) ????? ?????=-11111 2 2 1 120 a a a a C ,???? ? ?????=111113 12 2120a a a a C 此变换矩阵为等幅变换①。 所谓等幅值变换,是指原三相电流形成的总的磁动势(MMF :Magnetic Motive Force )和变换后的电流形成的磁动势MMF 幅度一样。 由于本文中120变换的目的是生成电压电流的空间矢量。而电流矢量的定义为其单独产生的磁动势与原三相电流产生的磁动势相等,所以此处从abc 到120的变换应以磁动势不变为准则,应选取等幅值变换。 ① 如何理解式(1-1)中的变换矩阵是等幅值变换???
MATLAB中的abc-dq相坐标变换
MATLAB中的abc-dq相坐标变换
坐标变换总结 姓名: 日期:2011.11.4
坐标变换的总结 一. 由三项坐标系变换到两相旋转坐标系 1. 三相到两相静止坐标系的变换 首先,确定三相电压的相序: cos()2cos()34cos() 3A m B m c m u U wt u U wt u U wt ππ ==- =- 在坐标图上表示三相到两相静止坐标系上的变换,如图所示: A u B u C u α β 图1 3-2s 变换 由上图,我们可以将A u 、B u 、c u 转化到两相静止坐标系上,具体等式如下: 211()322233()322A B C B C u u u u u u αβ? =--??? ?=-?? 插入系数2、3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。 后面会推导为什么可以保证模不变。 整理成状态方程的形式,如下: 11122 2333022A B C u u u u u αβ????- - ???????=?? ???????-????? 2. 两相静止坐标系到两相旋转坐标系的变换 我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。坐标变换如
图所示: β θ d q 图2 2s-2r 变换 此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。 cos sin sin cos d q u u u u αβθθθ θ???? ??=????? ?-???? ?? 二. 反向变换 1. 若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即可,根据图二,我们可以得到: cos sin sin cos d q u u u u αβθ θθ θ?? ??-??=???????????? 2. 同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换: 1 021332132 A B C u u u u u αβ?? ????? ? ?? ????=-????????????? ?-?? 三. 关于乘以2/3保持模不变的问题 首先,我们已经能够确定了电压相序 cos()2cos()34cos() 3A m B m c m u U wt u U wt u U wt π π ==- =- 经过变换后:
不同坐标系之间的变换
不同坐标系之间的变换 SANY GROUP system office room 【SANYUA16H-
§10.6不同坐标系之间的变换 10.6.1欧勒角与旋转矩阵 对于二维直角坐标,如图所示,有: ?? ? ?????????-=??????1122cos sin sin cos y x y x θθθθ(10-8) 在三维空间直角坐标系中,具有相同原点的两坐标系间的变换一般需要在三个坐标平面上,通过三次旋转才能完成。如图所示,设旋转次序为: ①绕1OZ 旋转Z ε角,11,OY OX 旋 转至0 0,OY OX ; ②绕0 OY 旋转Y ε角 10 ,OZ OX 旋转至0 2 ,OZ OX ; ③绕2OX 旋转X ε角, 0,OZ OY 旋转至22,OZ OY 。 Z Y X εεε,,为三维空间直角坐标变换的三个旋转角,也称欧勒角,与 它相对应的旋转矩阵分别为: ???? ? ?????-=X X X X X R εεεεεcos sin 0sin cos 00 01 )(1 (10-10)
????? ?????-=Y Y Y Y Y R εεεεεcos 0sin 010sin 0cos )(2 (10-11) ???? ? ?????-=10 0cos sin 0sin cos )(3Z Z Z Z Z R εεεεε (10-12) 令 )()()(3210Z Y X R R R R εεε= (10- 13) 则有: ???? ? ?????=??????????=??????????1110111321222)()()(Z Y X R Z Y X R R R Z Y X Z Y X εεε (10-14) 代入: ???? ??? ??? +-+++--=Y X Z Y X Z X Z Y X Z X Y X Z Y X Z X Z Y X Z X Y Z Y Z Y R εεεεεεεεεεεεεεεεεεεεεεεεεεεεεcos cos sin sin cos cos sin cos sin cos sin sin cos sin sin sin sin cos cos cos sin sin sin cos sin sin cos cos cos 0一般Z Y X εεε,,为微小转角,可取: sin sin sin sin sin sin sin ,sin ,sin 1cos cos cos =========Z Y Z X Y X Z Z Y Y X X Z Y X εεεεεεεεεεεεεεε 于是可化简
坐标变换总结Clark变换和Park变换
一个坐标系的坐标变换为另一种坐标系的坐标的法则。 由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难。为了简化电机的数学模型,需从简化磁链入手。 解决的思路与基本分析: 1.已知,三相( ABC )异步电动机的定子三相绕组空间上互差120度,且通以时间上互差120 ω的旋转磁场。 度的三相正弦交流电时,在空间上会建立一个角速度为 1 又知,取空间上互相垂直的(α,β)两相绕组,且在绕组中通以互差90度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场。此时的电机数学模型有所简化。 2. 还知, 直流电机的磁链关系为: F---励磁绕组 轴线---主磁通的方向,即轴线在d轴上,称为直轴(Direct axis)。 A---电枢绕组 轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在q轴,即与d轴成90度,称为交轴(Quadrature axis)。 由于q轴磁动势与d轴主磁通成正交,因此电枢磁通对主磁通影响甚微。换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化。 如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了。 电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致。 关于旋转磁动势的认识: 1) 产生旋转磁动势并不一定非要三相绕组不可。结论是: 除了单相电机之外,两相、三相或四相等任意对称(空间)的多相绕组,若通以平衡的多相电流,都可产生旋转磁动势。 根据这一道理,利用其在空间上互差90度的静止绕组,并通以时间上互差90度的平衡交流电流,同样可产生旋转磁场(或磁动势F),因而可等效代替三相绕组的作用。这就是ABC——αβ(3-2)变换的思路。 2)进而认识到,若直流电机电枢绕组以整体同步速度旋转,使其相互正交或垂直的绕组M,T分别通以直流电流,产生的合成磁动势F相对于绕组是固定不变的,但从外部看,它的合成磁动势也是旋转的。因此还可产生αβ——dq(2-2)变换。 矢量变换控制的基本思想:通过数学上的坐标变换方法,把交流三相绕组中的电流变换为两相静止绕组中的电流。可以使数学模型的维数降低,参变量之间的耦合因子减少,使系统数学模型简化。
不同坐标系之间的变换
§10.6不同坐标系之间的变换 10.6.1欧勒角与旋转矩阵 对于二维直角坐标,如图所示,有: ?? ? ?????????-=??????1122cos sin sin cos y x y x θθθθ(10-8) 在三维空间直角坐标系中,具有相同原点的两坐标系间的变换一般需要在三个坐标平面上,通过三次旋转才能完成。如图所示,设旋转次序为: ①绕1OZ 旋转Z ε角,11,OY OX 旋 转至0 0,OY OX ; ②绕0 OY 旋转Y ε角 10 ,OZ OX 旋转至0 2 ,OZ OX ; ③绕2OX 旋转X ε角, 0,OZ OY 旋转至22,OZ OY 。 Z Y X εεε,,为三维空间直角坐标变换的三个旋转角,也称欧勒角,与 它相对应的旋转矩阵分别为: ???? ? ?????-=X X X X X R εεεεεcos sin 0sin cos 00 01 )(1 (10-10) ???? ??????-=Y Y Y Y Y R εεεεεcos 0sin 010sin 0cos )(2 (10-11)
???? ??????-=10 0cos sin 0sin cos )(3Z Z Z Z Z R εεεεε (10-12) 令 )()()(3210Z Y X R R R R εεε= (10-13) 则有: ???? ? ?????=??????????=??????????1110111321222)()()(Z Y X R Z Y X R R R Z Y X Z Y X εεε (10-14) 代入: ???? ??? ??? +-+++--=Y X Z Y X Z X Z Y X Z X Y X Z Y X Z X Z Y X Z X Y Z Y Z Y R εεεεεεεεεεεεεεεεεεεεεεεεεεεεεcos cos sin sin cos cos sin cos sin cos sin sin cos sin sin sin sin cos cos cos sin sin sin cos sin sin cos cos cos 0一般Z Y X εεε,,为微小转角,可取: sin sin sin sin sin sin sin ,sin ,sin 1cos cos cos =========Z Y Z X Y X Z Z Y Y X X Z Y X εεεεεεεεεεεεεεε 于是可化简 ???? ? ?????---=111 0X Y X Z Y Z R εεεεεε (10-16) 上式称微分旋转矩阵。
dq坐标变换分析
dq 坐标变换的理解 由于dq 变换有四种,而不同的书中写的dq 变换不一致,应用起来很麻烦。所以为了便于更好理解每一种用法,不至于使用中陷入混乱,特写此报告理清每一种dq 变换。 一、滞后无功dq 变换结构图 1.1、q 轴有功d 滞后无功 a b c 图1、 q 轴有功d 轴滞后无功(张兴的书) 其中矢量I 以电网基波频率ω逆时针方向旋转。 如图1可得下列公式: sin()cos() d m q m m i I i I I θγθγ?=-??=-??=?? cos cos(120) cos(120)a m o b m o c m i I i I i I γγγ=??=-??=+? 解上述两个方程可得:
0cos cos(120)cos(120)2sin sin(120)sin(120)3111222o o q a o o d b c i i i i i i θθθθθθ????-+??????????=-+???????????????? ???? 0sin cos 1sin(120)cos(120)1sin(120)cos(120)1a d o o b q o o c i i i i i i θθθθθθ????????????=--????????????++?????? 1.2、d 轴有功q 滞后无功 相对应的d 轴有功、q 轴滞后无功的换算方法,只需将以上公式的d 、q 对换即可。 二、超前无功dq 变换结构图 2.1、d 轴有功q 超前无功 a b c 图2、d 轴有功q 轴超前无功 如图1可得下列公式:
cos()sin() d m q m m i I i I I θγθγ?=-+??=-+??=?? cos cos(120) cos(120)a m o b m o c m i I i I i I γγγ=??=-??=+? 解上述两个方程可得: 0sin()sin(120)sin(120)2cos()cos(120)cos(120)3111222sin sin(120)sin(120)2cos cos(120)cos(120)31112 22o o q a o o d b c o o a o o b i i i i i i i i i θθθθθθθθθθθθ????--+--??????????=--+--???????????????? ???? ????----+??=-+????????c ?????????? 00cos()sin()1cos(120)sin(120)1cos(120)sin(120)1cos sin 1cos(120)sin(120)1cos(120)sin(120)1a d o o b q o o c d o o q o o i i i i i i i i i θθθθθθθθθθθθ--????????????=-+-+????????????----?????? -????????=---????????+-+???? 2.2、q 轴有功d 超前无功 相对应的q 轴有功、d 轴超前无功换算方式只需将上面的式子中d 、q 对换即可。 总结: 基本上与θ有余弦关系的就是有功轴。q 轴有功d 轴滞后无功(张兴的书)与matlab 中的原配算法是一模一样的。 以上式子中的t θω?=+,改变?的值即可改变dq 变换的起始角度。单锁相环输出即为d i 、 q i 、ω、θ,且此时θγ=(即d 轴与Im 轴重合)。双锁相可输出输出即为d i +、q i +、d i -、
坐标变换基础知识
0、前言 本文主要介绍了三相电力变换设备中常用的坐标变换理论已经多端口网络的功率计算方法。不是什么创新内容,目的是帮助理解而已。因为坐标变换本来很简单,但是还是有好多人在其中纠结,或者搞不明白为什么,或者不理解为什么会有多种变换形式。 同时也表达我的一些观点: 一、任何高深的理论经过在实际应用中总是会转化为简单的计算或者简单的计算式,尤其以信号处理为代表。很厚的一本书,看了半天也看不懂什么是IIR ,但是拿到别人的程序,其中只有一句话。因为用的人不一定要懂很多,只要知道是什么,如果需要修改怎么改就可以了,所以本文的介绍力求深入浅出。 二、恰恰相反,实际应用中很简单的过程可能都有特定的甚至十分深奥的理论支持。所以,搞工程的人很可能对所有的过程讲的头头是道,但是在深问为什么就打不上来了。这样就是深度达不到,眼界也达不到。所以,本文避免了许多论文里一上来就“在三相对称系统中通常采用……坐标变换”,而是尽可能地把自己了解到的相关的知识加进来。种水稻的人可能没有系统的理论知识,但是袁隆平不可能在没有系统的知识的前提下就发现了天然不孕系水稻,并培育出两系、三系杂交水稻。 注:相关知识的拓展可以自行上网搜索;另外,本文没有仔细检查,难免有疏忽和错误之处,请阅读时注意。 一、背景知识介绍 1.巴拿赫(Banach )空间:完备的赋范线性空间。 略去完备性定义。 2.希尔伯特(Hilbert )空间:定义了内积的Banach 空间或者完备的内积空间。 设U 为数域K (实数或者复数)上的线性空间,对于U y x ∈?,,如果存在唯一的 K y x >∈<,,内积满足下列三条(内积定理) : a )对第一变元的线性:><+><>=+
维数基与坐标
第六章 线性空间 本次课的内容: §3 维数·基与坐标 §4基变换与坐标变换 目的要求: 掌握线性空间维数﹑基与坐标的概念 掌握过渡矩阵的概念及坐标变换公式. 复习: 线性空间定义:(1)设V 是非空集合, P 是一个数域. (2) V 的元素之间定义两种运算???数乘 加法 V 对于加法与数乘封闭,则称V 为P 上线性空间. 例如: [] ,,,n n n P P x P ? §3 维数·基与坐标 注: 第三章 n 维向量空间的一切定义与性质可以搬到任意线性空间中. 定义2 (线性组合 线性表出) (1) V是数域P 中的一个线性空间, (2) P k k k r ∈,,,21 ,)1(,,,,21≥∈r V r ααα , (3) r r k k k αααα+++= 2211 向量组r ααα,,,21 是一个线性组合。称向量α可以用向量r ααα,,,21 线性表出。 定义3 (等价) 设 r ααα,,,21 ; (1) s βββ,,,21 (2) 是V中的两个向量组。如果(1)中的每个向量都可以用向量组(2)线性表出,那么称向量组(1)可以用向量组(2)线性表出。如果(1)与(2) 可以互相线性表 ,那么向量组(1)与(2)称为等价的。 定义4 线形看见V中向量)1(,,,21≥r r ααα 成为线形相关,如果在数域P中有r 个不全为零的数r k k k ,,,21 ,使 02211=+++r r k k k ααα 。 (3) 如果向量r ααα,,,21 不线形相关,就称为线形无关。换句话说,向量组r ααα,,,21 称为线形无关,如果等式(3)只有在021====r k k k 时才成立。 性质: 1.单个向量组α线性相关的充分必要条件是α=0.两个以上的向量r ααα,,,21 线