激光测距

:
在脉冲式激光测距仪的设计当中,时差测量(time of flight measurement)成为了一个影响整个测量精度最关键的因素。德国acam 公司设计的时间数字转换芯片TDC-GP2为激光测距的时间测量提供了完美的解决方法。本文着重介绍了应用TDC-GP2 在设计激光测距电路当中的优势,以及在应用中给出一些建议和提出了需要注意的一些问题。
1. 概述
在当今这个科技发达的社会,激光测距的应用越来越普遍。在很多领域,电力,水利,通讯,环境,建筑,地质,警务,消防,爆破,航海,铁路,反恐/军事,农业,林业,房地产,休闲/户外运动等都可以用到激光测距仪。激光测距仪一般采用两种方式来测量距离:脉冲法和相位法脉冲式激光测距仪是通过测量激光从发射到返回之间的时间来计算距离的。因此时间测量对于脉冲式激光测距仪来说是非常重要的一个环节。由于激光的速度特别快,所以发射和接收到的激光脉冲之间的时间间隔非常小。。例如要测量1 公里的距离,分辨率要求1cm,则时间间隔测量的分辨率则要求高达67ps。德国acam 公司的时间数字转换器TDC-GP2 单次测量分辨率为典型65ps,功耗超低,集成度高,测量灵活性高,是脉冲式激光测距仪时差(TOF)测量非常理想的选择。
2. TDC-GP2 激光测距原理
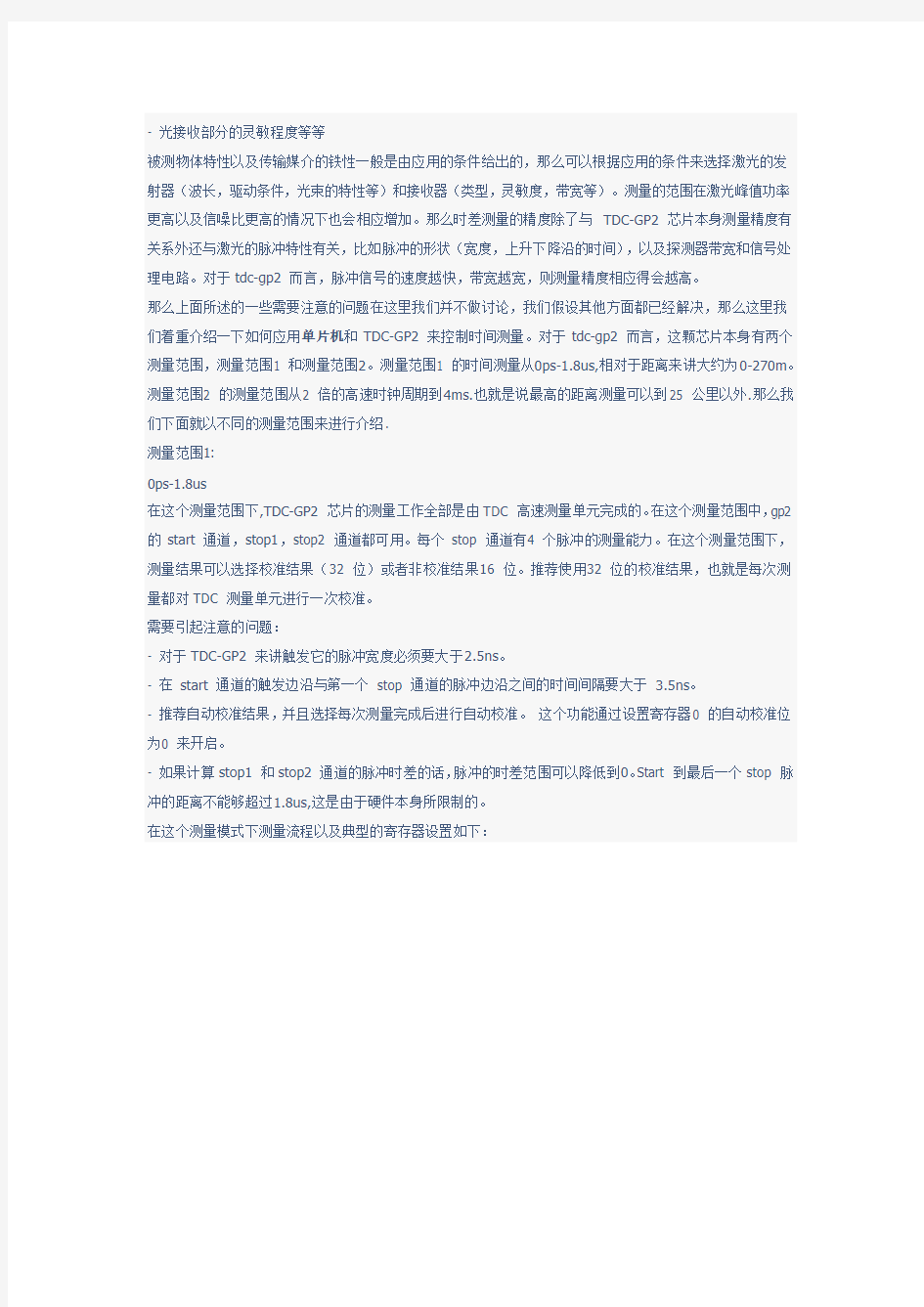
TDC-GP2 的激光测距基本原理如图1 所示:
图1:TDC-GP2 激光测距原理
激光发射装置发射出光脉冲同时将发射脉冲输入到TDC-GP2 的start 端口,触发时差测量。一旦从物体传回的反射脉冲达到了光电探测器(接收电路)则给TDC 产生一个Stop 信号,这个时候时差测量完成。那么从Start 到Stop 脉冲之间的时差被TDC-GP2精确记录下来,用于计算所测物体与发射端的距离。在这个原理中,单片机对于TDCGP2进行寄存器配置以及时间测量控制,时间测量结果传回给单片机通过算法进行距离的精确计算,同时如果有显示装置的话,将距离显示出来。在这个原理当中距离的测量除了与TDC-GP2 的时差测量精度有关外还与很多其他因素有关系:
- 激光峰值功率
- 激光束发散程度
- 光学元件部分
- 光传输的媒体(空气,雨天,雾天等)
- 物体的光反射能力
- 光接收部分的灵敏程度等等
被测物体特性以及传输媒介的铁性一般是由应用的条件给出的,那么可以根据应用的条件来选择激光的发射器(波长,驱动条件,光束的特性等)和接收器(类型,灵敏度,带宽等)。测量的范围在激光峰值功率更高以及信噪比更高的情况下也会相应增加。那么时差测量的精度除了与TDC-GP2 芯片本身测量精度有关系外还与激光的脉冲特性有关,比如脉冲的形状(宽度,上升下降沿的时间),以及探测器带宽和信号处理电路。对于tdc-gp2 而言,脉冲信号的速度越快,带宽越宽,则测量精度相应得会越高。
那么上面所述的一些需要注意的问题在这里我们并不做讨论,我们假设其他方面都已经解决,那么这里我们着重介绍一下如何应用单片机和TDC-GP2 来控制时间测量。对于tdc-gp2 而言,这颗芯片本身有两个测量范围,测量范围1 和测量范围2。测量范围1 的时间测量从0ps-1.8us,相对于距离来讲大约为0-270m。测量范围2 的测量范围从2 倍的高速时钟周期到4ms.也就是说最高的距离测量可以到25 公里以外.那么我们下面就以不同的测量范围来进行介绍.
测量范围1:
0ps-1.8us
在这个测量范围下,TDC-GP2 芯片的测量工作全部是由TDC 高速测量单元完成的。在这个测量范围中,gp2 的start 通道,stop1,stop2 通道都可用。每个stop 通道有4 个脉冲的测量能力。在这个测量范围下,测量结果可以选择校准结果(32 位)或者非校准结果16 位。推荐使用32 位的校准结果,也就是每次测量都对TDC 测量单元进行一次校准。
需要引起注意的问题:
- 对于TDC-GP2 来讲触发它的脉冲宽度必须要大于2.5ns。
- 在start 通道的触发边沿与第一个stop 通道的脉冲边沿之间的时间间隔要大于3.5ns。
- 推荐自动校准结果,并且选择每次测量完成后进行自动校准。这个功能通过设置寄存器0 的自动校准位为0 来开启。
- 如果计算stop1 和stop2 通道的脉冲时差的话,脉冲的时差范围可以降低到0。Start 到最后一个stop 脉冲的距离不能够超过1.8us,这是由于硬件本身所限制的。
在这个测量模式下测量流程以及典型的寄存器设置如下:
单片机与tdc-gp2 的通信是通过spi 串口完成的,那么对于测量范围1 的一个典型的测量过程为:
void gp2config()
{
SPIwrite8 (0x50); //上电复位
//配置寄存器:
SPIwrite32 (0x80000420) ; //选择测量范围1,自动校准,晶振上电后一直起振。
SPIwrite32 (0x81014100) ;//stop1 接受1 个脉冲,定义计算方法,用stop1 通道的第一个脉冲减去start 脉冲
SPIwrite32 (0x82E00000) ; // 开启所有中断源
SPIwrite32 (0x83000000) ;
SPIwrite32 (0x84200000) ;
SPIwrite32 (0x85080000) ;
}
//测量循环:
void measurement()
{
SPIwrite8 (0x70) ;//初始化测量,通知gp2 进入测量准备状态
Check INTN=0?
SPIwrite32 (0xb4) ; //发送命令读状态寄存器
SPIread8 (STAT) ;
STAT&0x0600>0?//=>说明有测量溢出,有问题
SPIwrite32(0xb0) ; //发送命令读reg0 结果
SPIread32(reg0) ;
}
那么单片机在从gp2 读取完数据之后,可以对数据进行处理,来计算脉冲来回的距离。在上面的测量过程中如果gp2 在被初始化之后,并没有接受到任何start 信号,测量将不会发生。也不会产生中断。只有start 信号被接受后,测量才被触发,那么无论是测量正常还是在规定时间内没有接受到stop 脉冲,在gp2 的INTN 管脚都会有中断信号产生,通过判断状态寄存器的内容来判断测量是否正常。
注:在接受start,stop 脉冲之前,必须要将gp2 的管脚en_start,en_stop 置高平,否则start,stop 通道则不会被选通,测量也不会被触发!!
应用平均提高精度的方法:
上面所说的情况为,你的激光start 脉冲给tdc-gp2 的start 通道,激光的返回脉冲给tdcgp2的stop 通道的情况。
在这种情况下,gp2 的单次测量精度为65ps。当测量的输出频率并不是非常重要的情况下,比如每秒钟输出1 到2 次结果,那么这个时候为了提高测量精度,我们可以通过多次测量平均的方法来消除系统误差。为了使gp2 能够通过平均的方法来大大的减少误差,那么下面推荐的测量设计是非常有效的,可以将系统误差的峰峰值降低到10ps 一下。如下图所示:
如上图所示,在这个情况下我们使用的是测量范围1,激光的发射和接收脉冲信号是给到stop1 和stop2 的,
而在tdc-gp2 的start 通道,start 信号是由单片机给出的一个不参与测量的start 信号。测量过程如下:
首先由单片机发出一个不参与测量的但是要触发测量用的dummy start.需要这个信号是因为start 通道的这个信号是告诉gp2 现在开始进入测量状态了。那么在至少50ns 后,单片机触发激光器产生发射信号同时将这个信号输入到stop1 通道。那么接收到的laser脉冲信号则输入到stop2 通道。也就是说用stop1 和stop2 来测量激光发射和接收的时间差,而start信号是由单片机给出来触发gp2 的。
那么之所以这样的原因是在tdc-gp2 的内部,有一个噪声单元,通过寄存器设置可以触发这个噪声单元。噪声单元将会在gp2 的start 通道脉冲上加任意分布噪声,那么这样做的目的是为了在平均的时候,可以大大消除量化误差和系统误差。那么这个一位的设置为寄存器5 中的EN_STAR TNOISE 设置。
没有平均的情况下:
这样做的好处为:
1.stop1 和stop2 的时间间隔测量可以最低到0。
2.通过这个测量之后如果平均gp2 的测量结果,可以大大消除系统误差,跟据平均的次数不同,最多可以使gp2 的精度提高至小于6ps.
3.对于温度变换是相当稳定的那么需要注意的是由单片机给的start 信号与激光的start 信号(也就是stop1 信号)的时间要在50ns 以上,这个时间是为了给start 信号加噪声。在这个情况下的测量过程中需要将上面的寄存器1 的配置稍作修改:
SPIwrite (0x81194900) ; ;//stop1 和stop2 通道分别接受一个脉冲,定义计算方法,用stop2 的第一个脉冲减去stop1 的第一个脉冲。在应用我们的gp2 评估测量系统测试情况,测量1us 时间间隔在平均1000 次后,噪声曲线如下:
在平均1000 次的情况下,输出的峰峰值噪声降低到10ps 以内,相当于分辨1mm 的距离。那么通过这种平均的方式提高测量精度,对于测量频率不高的激光测距应用是非常有帮助的。
测量范围2:2xTref-4ms
在测量范围2 当中,测量是通过TDC 测量单元和一个预计数器共同完成的。如图所示:
在测量时差相对较大的时候,tdc 的内部核心测量单元只测量如图所示从start 信号开始到下一个参考时钟周期的上升沿,然后测量stop 信号上升沿到下一个参考时钟周期的上升。那么中间的时间,则由数时钟周期coarse count 来得出。因此在测量范围2 结果的计算公式为上面图中的公式,其中Tref 为时钟周期,clkhsdiv 为分频因数,Cc 为coarse count 所数的周期个数,Fc1 为start 信号开始到下一个参考时钟周期的上升沿时间,Fc2 为stop 信号上升沿到下一个参考时钟周期的上升沿时间,cal1 和cal2 为tdc 核心测量参考时钟周期,做校准用。
在这个模式下TDC-GP2 应用一个内部的计数器将测量范围扩展到了4ms。那么选择这个测量范围后,测量只能够在start 通道和stop1 通道中进行,stop1 通道最多接受的脉冲数为3 个。那么测量的时差范围从2 倍的内部时钟周期最大到4ms 的时差。在这个精度下的典型精度保持不变,还是65ps。
需要引起注意的问题:
- 对于GP2 来讲触发它的脉冲宽度必须要大于3.5ns。
- 在start 脉冲触发之后stop 脉冲和start 脉冲间隔至少要大于2倍的内部参考时钟周期。
- 在没有应用精度可调节模式的情况下GP2 的测量必须要进行校准。在低采样频率的情况下最简单的方法
就是应用芯片自带的自动校准功能。或者也可以应用手动校准TDC。
TDC-GP2 的测量范围2的优点:
- 整个的测量范围最大可以达到4ms,精度还是65ps,系统的精度将主要取决于光学系统中其他器件的精度。- 对于长距离测量为了能够得到相当强度的返回信号高能的激光脉冲信号是必要的。
- 可以检测到最多3 个脉冲反射,这个时候脉冲对的精度为2 个时钟周期(至少2 个时钟周期的时间间隔)。- 在这个测量模式下可以通过平均的方式消除噪声。采样100 次数据,那么平均之后的标准偏差将会被减少100=10 倍,,到6.5ps ≡ 0.98mm。做为必要的条件start 信号和stop 信号必须与时钟信号完全孤立开,没有任何关联。否则采样的量化误差将会落在同一位置上。
在这个测量模式下测量流程以及典型的寄存器设置如下:
void gp2config()
{
SPIwrite8 (0x50); //上电复位
//配置寄存器:
SPIwrite32 (0x80008468) ; // 选择测量范围2,自动校准,晶振上电后一直起振。
SPIwrite32 (0x81214200) ;// stop1 接受1 个脉冲,定义计算方法,用stop1 通道的第一个
脉冲减去start 脉冲
SPIwrite32 (0x82E00000) ; // 开启所有中断源
SPIwrite32 (0x83000000) ;
SPIwrite32 (0x84200000) ;
SPIwrite32 (0x85080000) ;
}
//测量循环:
void measurement()
{
SPIwrite8 (0x70) ;//初始化测量,通知gp2 进入测量准备状态
Check INTN=0?
SPIwrite8 (0xb4) ; //发送命令读状态寄存器
SPIread8 (STAT) ;
STAT&0x0600>0?//=>说明有测量溢出,有问题
SPIwrite8(0xb0) ; //发送命令读reg0 结果
SPIread32(reg0) ;
}
在上面的gp2 测量范围2 寄存器设置中,需要注意的是在寄存器1 中设置接受脉冲个数的时候,如果你预期接受1 个脉冲,则需要设置为2 个。因为在测量范围2 中如原理图所示实际上是进行了两次测量,因此要多设置一个脉冲。
同样在测量范围2 中,对于系统测量数据进行平均同样可以大大的提高测量精度,因此用户可以根据自己的实际情况和所需的测量频率来进行相应得平均测量。
脉冲激光测距仪的设计-课程设计
目录 第一章绪论 (1) 1.1设计背景 (1) 第二章脉冲激光测距仪的工作原理 (2) 2.1测距仪的简要工作原理 (2) 第三章脉冲激光器的结构及工作过程 (3) 3.1激光脉冲测距仪光学原理结构 (3) 3.1.1测距仪的大致结构组成 (3) 3.2主要的工作过程 (4) 3.3主要部件分析: (4) 3.3.1激光器(一般采用激光二极管) (4) 3.3.2激光二极管的特性 (5) 3.3.3光电器件(采用雪崩光电二极管APD) (6) 第四章影响测距仪的各项因素 (7) 4.1光脉冲对测距仪的影响 (7) 4.2发散角对测距仪的影响 (8) 第五章测距仪的光电读数显示 (9) 5.1距离显示原理及过程 (9) 5.2测量精度分析 (10) 5.3总述 (11) 参考文献 (11)
第一章绪论 1.1设计背景 在当今这个科技发达的社会,激光测距的应用越来越普遍。在很多领域,如电力,水利,通讯,环境,建筑,地质,警务,消防,爆破,航海,铁路,军事,农业,林业,房地产,休闲、户外运动等都可以用到激光测距仪。 激光测距仪一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。 当前激光测距仪的发展趋势是向测量更安全、测量精度高、系统能耗小、体积小型化方向发展。激光测距仪一般采用两种方法来测量距离:脉冲法和相位法。而其中脉冲激光测距的应用领域也是越来越宽广,比如,地形测量、战术前沿测距、导弹运行轨道跟踪以及人造卫星、地球到月亮距离的测量等。脉冲激光测距法是利用激光脉冲持续时间非常短,能量相对集中,瞬时功率很大(可达几兆瓦)的特点,在有合作目标的情况下,脉冲激光测距可以达到极远的测程;如果只是利用被测目标对脉冲激光的漫反射所取得的微弱反射信号,也是可以测距的。因而脉冲激光测距法应用较多。
激光测距仪操作文档
激光测距仪操作说明书 一.激光测距仪硬件介绍 HUD LCD显示器 RS232数据串口 扳机 LCD显示器 二.测距仪的技术指标 a)罗盘(抗磁性传感器,Post-Fluxgate 技术)
i."0.5 o 精确度 b)磁倾仪 i."0.1 o 倾斜精度 ii."40 o 倾斜范围 c)测距 i.精度–测85米外的白目标精度为0.1米 ii.最大距离–1850米(反射目标) iii.最小距离–3米 iv.高压输电线175米 v.杆状标志400米 vi.树(无叶)400米 vii.建筑物,树(有叶)800米 三.激光测距仪的基本操作 3.1 如何校对激光测距仪 ●开启电源 ●按“MENU” 健 ●用>?键来进行功能选择 ●选择“COMP” 并按下“Enter” 键 ●选择“CAL” 并按下“Enter” 键 ●LCD显示窗显示“Initializing Please Wait!” & “Rotate Unit for Calibration” 信息
●以射击的姿势扣住扳机. LCD显示窗显示“Data Point Count” 信息 ●慢慢转动Contour枪1-2圈. 每圈用45-60秒钟完成 ●慢慢转动Contour枪1-2圈. 每圈用45-60秒钟完成 ●在转动中,慢慢地从上到下,从左到右移动(±40o的 范围) ●虽着 Contour 的移动, 你将看到数据点(Data Point Count) 在增加。当其值增加到275时,罗盘校对操作就完成 了。松开板机,系统恢复原来的设置 ●每次系统上电都必须要重复以上操做 3.2 开机自检 自检信息:仪器开机后将进行自检,自检信息将显示在LCD 显示屏上: Selft Test Controur XLRic 当自检信息结束后回到以前的测量界面时,说明自检成功,否则会出现以下错误信息: End Of Self Test *** Fall 3.3 标准测量模式下的测量 标准模式是仪器在开机后默认的模式,在这种模式下,仪器将显示所测目标的距离、方位和倾斜值。首先确认你所选的显示模式为:
激光测距仪操作规程
激光测距仪操作规 程
1.使用方法触按电源开关,接通电源,“电源、测试指示灯”为绿色。触按档位选择开关,选择适合的档位。 2.将仪表测量端子的两个电流输出端子用两根测试线接到被测导体的两个端子,两个电压输入端子也接到被测导体的两个端子。 3. 如图所示,电压端子应位于电流端子的内侧,并尽量靠近被测试品,以减少引线电阻引入的误差。 4.接线完毕后,触按一下 TESTE 键,“电源、测试指示灯”为红色,显示屏显示的值即为测得的电阻值。 5.当被测导体开路或阻值大于选定量程时, 显示屏首位显示“1”,后三位数字熄灭。 6.注意事项 a)本仪表使用6 节1.5V(LR6,AA)电池供电。当显示屏出现欠压符号“”时,请更换电池,以保障得到正确的试值。换下的旧电池请勿乱扔,以免造成污染。B)仪器应避免受潮、雨淋、跌落、暴晒等。
1.目的: 建立超声波测厚仪标准操作规程。 2.适用范围: 试验室所有检验人员执行本规程,部门领导监督,检查本规程的执行。 一、操作规程 1、机器校准 仪器壳下方有一个厚度为4mm的试块,按“菜单”键进入菜单,经过“上下”箭头选择“声速”,在选择“声速设置”,把声速设置为5920m/s,并在试块上涂抹耦合剂,把探头放在试块中央轻轻压紧,按一下“下箭头”,能够看到仪器显示试块厚度为4.000mm,如果试块厚度测试值不为4.000mm请在进行校准,直到试块测量厚度为 4.000mm。仪器校准完成后即能够正常测量了。 2、测试块准备 准备50mm的测试医用消毒超声耦合剂样品三份,以备测试。 3、声速测试 将探头与已准备好的测试样品耦合,确保探头不晃动并耦合良好,此时能够看到显示屏上耦合标志。选择声速测试界面,输
基于TDC-GP21的激光测距设计
基于TDC-PG21的激光测距 【摘要】激光测距仪正朝着小型、低功耗和高精度方向发展,尝试研制一种高精度的便携式脉冲激光测距仪。针对脉冲式激光测距技术展开,重点研究短时间间隔的高精度测量这一关键技术。在对普通脉冲激光测距机的时间间隔测量方法分析后,提出了基于高精度时间间隔测量芯片TDC-GP21的便携式脉冲半导体激光测距仪系统方案。分析了TDC-GP21时间测量原理,设计了基于TDC-GP21的时间间隔测量单元,脉冲半导体激光器的驱动电源、光电探测器的驱动电路。针对有限距离的计数分辨率引起的误差,结合传统提高时间分辨率的方法,并对这一技术进行研究、发展和创新,使得测距系统的时间测量精度得到了很好的保证及提高,降低了硬件成本,简化了控制电路。 【关键词】激光测距,时间间隔测量,TDC—GP21,测距精度
Laser Ranging Based on TDC-GP21 [Abstract]The laser range finder is developing in small,low-power and high-precision direction.A portable laser range finder with high precision was researcher in this paper. We have studied the pulsed laser ranging technology, and the priority is the critical technology of the high-precision measurement in short intervals. In this paper,we have proposed the solutions of the portable diode laser rangefinder system based on the high-precision time interval measurement chip TDC-GP21, through a deep research of the principle of the pulsed laser rangefinder. studied the time measuring principle of the TDC-GP21, designed the time interval measurement unit that based on the TDC-GP21, designed the driven power of the pulse- semiconductor lasers and the driven circuit of the photoelectric detector. T o solve the error caused by the count resolution in a limited distance, we have combined traditional methods to improve the time resolution, and with the research, development and innovation of the technology, we have ensured and developed the time measurement accuracy of the ranging system, reduced the cost of the hardware and simplified the control circuit. [Key Words] Laser ranging, Time intervals , TDC-GP21, Ranging precision measurement
激光测距仪使用教程
美国LaserCraft高精度激光测距仪-Contour XLRic型,这款激光测距仪是高精度和远量程的结合体,是目前市场性能最好的一款手持激光测量系统。它能成功地在保持良好精度的前提下测量以下目标到前所未有的距离:175米到电力线,400米到电线杆,800米到建筑物。同时,它是一款坚固防水的仪器,遇到下雨,下雪,大雾或沙尘暴天气时,您只把工作模式选择到“坏天气”模式,您的工作就不会受到任何影响。在坏天气下使用它,就如同在好天气下使用一样方便,好用。如果装配了三脚架,它就可以用来进行更远距离的精确测量和进行精密的倾斜测量。 Contour XLR采用最新激光技术,小巧、轻便、使用方便,可准确测量目标距离。有恶劣天气工作模式保证仪器在仪器在雨、雪、雾、沙尘暴天气条件下仍可可靠工作。仪器配备HUD显示器,可边瞄准边测量。是建筑结构规划等通用距离测量的得力仪器。最大测量距离1850米,精度0.1米。 Contour XLRi具有XLR系列的全部特点,同时增加360度倾角传感器。有六种工作模式,分别是距离、角度、水平距离、垂直距离、二点高度、三点高度。有串行口,可通过计算机或数据记录器记录数据。典型应用:矿山地形测量、森林资源调查、倾斜测量、高度测量、水平杆测量、塔高测量。 Contour XLRic将XLRi和GPS以及数据采集器结合起来,可测量不易达到目标的参数。内置软件可计算树高、倾斜、面积、周长、不见线的长度、水平距离等。XLRic内部有数字罗盘和倾角传感器,是测绘的得力仪器。
ContourMAX最大测量距离达到3000米,重仅1.6公斤,首/末目标可选,门控能力、恶劣天气模式、手持/平台安装可选。典型应用:火灾控制系统、遥测、GPS偏移测、航空测量等。和Contour 系列手持激光测量系统中的Contour XLRi比较起来,Contour XLR ic在内部又集成了一个高精度磁通量数字罗盘。配合高精度磁通量数字罗盘,XLR ic在功能就比XLR和XLRi多了不少。有了Contour XLRic,您就可以把它和您的GPS系统连接起来,去测量那些无法到达或不容易到达的地方的坐标信息,省时又省钱。或者您也可以使用它内置的软件计算:树高,倾斜度,面积,周长,空间线段的长度,水平距离,高差等等数据。由于Contour XLRic配置了数字罗盘和倾斜角度测量仪,所以它完全可以被看作是一个手持式全站仪,可以协助您进行测绘和测量工作。一级人眼安全的激光测距仪精确地向您报告以下测量数据:距离,方位,倾斜角。技术特点-测量距离到: 1850米;-测量精度达到:10厘米;-倾斜角度测量;-方位角测量;-周长测量;-面积测量;-电力线高度和垂度测量;- 3D空间尺寸测量;-连接GPS工作;-高度测量功能;-“点到点”斜距测量;-水平距离测量和垂直距离测量;-独特的坏天气模式:一般的测距仪在天气不好的情况下,测量的距离往往会大大缩短,甚至无法工作。Contour系列激光测距仪的“坏天气模式”消除了这种现象。当天气情况不好的时候,比如:多云,大雾,扬尘,潮湿等,启动该模式,测量起来就和好天气时测量一样轻松快速!工作模式(详细功能)模式一标准测量模式:该模式测量仪
光电子课程设计_基于三角测量法的激光测距
光电子课程设计: 基于三角测量法的激光测距 摘要:本文先对激光测距的种类及原理进行介绍,其次分析不同种类的优缺点。确定制作测距仪器的制作方向。分析测量当中不同元器件存在的问题,寻找有效的解决方案,重点研究摄像头成像时存在误差的形成原因。根据研究得到的数据,对PC客户端的程序设计进行调整。利用程序尽可能减少由于硬件产生的误差。重点是设计出能确定光点的定位算法,通过对摄像头的定标、激光定位,达到实验数据与实际测量误差在10%以内。最后,提出对作品进行优化和系统功能提升计划 关键词:短距离、低成本、三角测量法 ABSTRACT: In this paper, the principle of laser ranging species and introduced first, followed by analysis of the advantages and disadvantages of different types. Production rangefinder to determine the direction of the production. Analytical measurements among different components of the problems, to find effective solutions to the causes errors in the presence of the camera focused on imaging. According to data obtained from studies on the client PC programming adjustments. The use of procedures to minimize errors due to hardware-generated. Focuses the light spot can be determined to design the location algorithm, through the camera calibration, laser positioning, to the experimental data and the actual measurement error is within 10%. Finally, the work in optimizing system functionality and Enhancement Programme KEY WORDS: Short distance、Low cost 、Triangle measurement
激光测距系统设计
本科生毕业设计(论文) 开题报告 题目:激光测距系统设计 姓名:黄侠 学号:201006060118 指导教师:吕岑 班级:光信101 所在院系:电气与信息工程学院
课题名称激光测距系统设计 课题来源科研课题课题类型工程设计类指导教师吕岑 学生姓名黄侠学号201006060118 专业光信息科学与技术 一、课题的意义以及国内外发展状况: 课题的意义: 激光与普通光源有显著的差别,它利用受激发射原理和激光腔的滤波效应,使所发射的光束具有一系列新的特点:激光有小的发散角,即所说的方向性好或准直性好;激光的单色性好,即相干性好,激光的输出功率有限,但是功率密度很高,一般的激光亮度要比太阳表面的亮度大。在激光问世以前,人们没有什么办法来获得强相干光。激光技术出现后,很快被应用到各种测量(大地测量、地形测量、工程测量、航空摄影测量以及人造地球卫星的观测和月球的光学定位等航天测量)中。与此同时,现代电子技术的飞速发展和光电器件性能的不断提高,使激光测距仪成为距离测量的主要仪器之一。与其它测距技术相比,激光具有角分辨率高、抗干扰能力强,可以避免微波贴近地面的多路径效应和地物干扰问题,并且具有天线尺寸小、质量轻、结构小巧、和安装调整方便等优点,激光测距仪是目前高精度测距最理想的仪器之一。由于以上各方面的原因,使得激光测距在测量领域得到了青睐,并被迅速推广。 激光测距仪的研究应用在国民经济和国防建设中具有非常重要的意义。激光测距的精度与操作者的经验和被测距离无关,误差仅取决于仪器本身的精度。用激光测距对卫星进行精密测轨,精度已达l cm,日本用于预防地震的长距离监测系统,全程84 km,误差小于l mm。军事上装备的激光测距仪,重量一般为10 kg左右,最小的只有0.36 kg,体积只有香烟盒那么大,激光由于方向性好,所以可以不用巨大的天线就可以发射极窄的光束。激光测距不仅分辨率高,而且具有抗干扰能力强的窄光束和短的脉冲宽度,不仅使横向和纵向目标分辨率大大提高,而且不受电磁干扰和地波干扰。 由于激光与激光测距技术很多优点的存在,本课题意在研究出相位法激光测距的光学系统。 国内外发展现状: 国外发展现状 20世纪中期,激光测距机是激光器在军事上最早应用的项目。世界上第一台激光测距机于1961年诞生在美国休斯飞机公司,称为柯利达I型.经过30年的发展,军用激光测距机已更新了两代,研制发展了三代。第一代激光测距机采用发射0. 6943,cun红外红宝石激光器和光电倍增管探测器,是最早问世的激光测距机.20世纪70年代初期少量装备部队,如美国的AN/GVS-3、日本的70式,因其隐蔽性差、效率低、体积大、重量重、耗电多,很快便被第二代激光测距机取代。第二代激光测距机采用发射 1. 06,tnn近红外钦激光器(主要是Nd:YAG激光器,少数为钦玻璃激光器)和硅光电二极管或硅雪崩光电二极管探测器。第二代比第一代隐蔽性好、效率高、小巧、耗电少,因此第二代激光测距机的小型化研制进展迅速。第三代激光测距机,即人眼安全的激光测距机。目前已研制成工作波长为10. 6μm和1. 54μm 的三种不同类型的各种型号的人眼安全激光测距机,己进入生产和应用阶段。与此同时,激光测距技术也逐渐应用到民事领域。从20世纪70年代初至今的近30年,国外许多大学、研究机构和公司也开展了这方面的研究工作。
徕卡激光测距仪使用说明书
徕卡激光测距仪使用说明书 一、使用前的准备 (一)电池的装入/更换 打开仪器尾部的固定挡板。向前推卡钮,向下将底座取下。按住红色的卡钮推开电池盒盖。安装或更换电池。关闭电池盒盖,安装底座和卡扣。当电池的电压过低时,显示屏上将持续闪烁显示电池的标志{B,21}。此时应及时更换电池。 1、按照极性正确装入电池。 2、使用碱性电池(建议不要使用充电电池)。 3、当长时间不使用仪器时,请取出电池,以避免电池的腐蚀。 更换电池后,设置和储存的值都保持不变。 (二)多功能底底座 固定挡板可以在下面的测量情况下使用: 1、从边缘测量,将固定挡板拉出,直到听到卡入的声音。 2、从角落测量,将固定挡板拉出,直到听到卡入的声音,轻轻将固定挡板向右推, 此时固定挡板完全展开。 仪器自带的传感器将辨认出固定挡板的位置,并将自动设置测量其准点。 (三)内置的望远镜瞄准器 在仪器的右部有一个内置的望远镜瞄准器。此望远镜瞄准器为远距离测量起到辅助的作用。通过瞄准器上的十字丝可以精确地观察到测量目标。在30米以上的测量距离,激光点会显示在十字线的正中。而在30米以下的测量距离,激光点不在十字线中间。 (四)气泡 一体化的水泡使仪器更容易调平。 (五)键盘 1、开/测量键 2、第二级菜单功能 3、加+键 4、计时(延迟测量)键 5、等于[=]键 6、面积/体积键 7、储存键 8、测量基准边键 9、清除/关键 10、菜单键 11、照明键 12、间接测量(勾股定律)键 13、减-键 14、BLUETOOTH (六)显示屏 1、关于错误测量的信息 2、激光启动 3、周长 4、最大跟踪测量值 5、最小跟踪测量值 6、测量基准边 7、调出储存值
Trupulse360激光测距仪中文操作说明.
TruPulse360简易操作说明一、外观说明 1. 1. 发射键 (开机键) 2. 上翻菜单键 3. 下翻菜单键 4. 可调目镜 5. 屈光度调节环 6. 脚架连接口 7. 吊带和镜头盖栓靠杆 8. RS232 数据输出端口 9. 电池盖 10. 激光接收镜头 11. 激光发射镜头 / 目镜 二、基本操作 2.1 开机 打开电池盖,按电池室内图示方向装入2支5号电池,盖好盖子。按下“发射键 (开 机键)”约3秒即开机。 2.2 关机 同时按“下上翻菜单键”和“下翻菜单键”约4秒即关机。待机2分钟左右自动关机(开启蓝牙功能时待机30分钟后关机)。
2.3 系统设置 2.3.1 按住下翻菜单键4 秒钟,进入上图所示系统设置菜单, 按上下键切换”Units”“bt”“InC”“H_Ang”等设置项目。 按发射键进入设置选项, 再按上下键切换选择项, 按发射键选定项目, 再按发射键回到测量工作状态。 测量单位设置 距离单位:Feet(英尺) / Meter(米)倾斜角度单位 Degree(度) 蓝牙功能设置 出现bt_on时按发射键选中拉牙功能开启,出现btoFF 时按发射键关闭蓝牙。
倾斜角度校正: 按住下翻菜单键4 秒,进入系统设置菜单, 按上下键切换到上图所示inC设置画面,按发射键进入inC的设置 菜单,按上下键切换no / yes,当画面显示yes 是按发射键进入倾角校正。 校正图示:把仪器放在平板上,按上图所示方向摆好后各按发射键一次
方位角校正
Slope Distance (SD) 斜距 Azimuth (AZ) 方位角 Inclination (INC) 倾角Horizontal Distance (HD) 水平距Vertical Distance (VD) 垂直距离Height Routine (HT) 高差Slope Distance (SD) 斜距 Azimuth (AZ) 方位角 Inclination (INC) 倾角Horizontal Distance (HD) 水平距Vertical Distance (VD) 垂直距离Height Routine (HT) 高差
激光测距仪原理
激光测距仪激光测距基本原理 激光测距是光波测距中的一种测距方式,如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示。 D=ct/2 式中:D——测站点A、B两点间距离;c——光在大气中传播的速度;t——光往返A、B 一次所需的时间。 由上式可知,要测量A、B距离实际上是要测量光传播的时间t,根据测量时间方法的不同,激光测距仪通常可分为脉冲式和相位式两种测量形式。 相位式激光测距仪 相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间。 相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。 若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为: t=φ/ω 将此关系代入(3-6)式距离D可表示为 D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ) =c/4f (N+ΔN)=U(N+) 式中:φ——信号往返测线一次产生的总的相位延迟。 ω——调制信号的角频率,ω=2πf。 U——单位长度,数值等于1/4调制波长 N——测线所包含调制半波长个数。 Δφ——信号往返测线一次产生相位延迟不足π部分。 ΔN——测线所包含调制波不足半波长的小数部分。 ΔN=φ/ω
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。 为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。 由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而目前推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。是短程精度精密工程测量、房屋建筑面积测量中最新型的长度计量标准器具。
激光测距仪使用方法
激光测距仪使用方法 激光测距仪的使用方法其实不复杂,只要选择好模式即可,一般都是一键操作。让我们举例说明,以TruPulse 200和欧尼卡2000B为例,方便我们理解具体操作。新发布的TruPulse 200型号测量的不仅仅是距离和角度。这款激光器配备了全新的改进型增强功能,为用户提供先进的尖端技术以及LTI激光器所熟知的易于操作和准确性。外观颜色也有变化,新款图帕斯200外观是以黑色为主,搭配黄色线条。 一、图帕斯200升级版优势在于: TruPulse图帕斯200激光测距仪,相比以前老款,精度提升到0.2米,且带有蓝牙,外观颜色也有变化,黑黄相间。 1、主要功能和增强功能: 精确度提高33% 目标收购率提高25% 无线通信 晶莹剔透的7倍光学镜片 可调节的眼睛屈光度 TruTargeting技术 2、所有TruPulse激光测距仪的主要特点: 以度或百分比度量斜率距离(SD)+倾角(INC) 计算水平距离(HD)+垂直距离(VD)+高度(HT)+ 2D缺失线(ML) 使用***近+***远+连续+过滤器模式区分所需目标与周围障碍物 安装在三脚架上,并具有优质光学元件,可增强视野 二、产品参数:
二、五种测量方式: 1、SD模式点到点直线距离 (斜距)十字光丝直接瞄准被测物体按FIRE键 2、VD模式垂直高度 (相对高度)即:单点定高目镜内部十字光丝直接瞄准被测物体的最高点适合测量悬空物体的 相对高度(如:高架线缆) 3、HD模式水平距离十字光丝瞄准被测物体仪器内置的倾斜补偿器会进行自动角度补偿计算 离被测物体的水平距离 4、HT模式绝对高度即:三点定高,目镜内部十字光丝直接瞄准被测物 测量顺序:瞄准被测中部,先测HD水平距离 瞄准被测物体的顶部,按FIRE键 瞄准被测物体的底部,按FIRE键 适合测量建筑物实体的绝对高度——如:建筑物高度,树木高度,塔台高度; 5、INC模式倾斜角度 (俯仰角度)十字光丝直接瞄准被测物体,按FIRE键。 图帕斯测距仪系列产品质量是测绘行业公认的,但其价格也同样是测绘行业顶尖的。而 拥有同样性能的欧尼卡2000B,价格要比图帕斯低约三分之一。下面我们再来看看欧尼卡2000B测距仪的产品参数,通过产品功能和参数的对比让我们来进一步了解产品是否符合我 们的需求,综合考虑产品性能和产品价格。Onick 2000B的推出,代表着测量精度达到一个 新的革命性专业水平,200米测距范围内,精准测量0.2米,带有蓝牙和RS232串口,覆盖 了图帕斯200B,在电力线路勘测应用领域中被广泛运用。坚固的外观材质,舒适的防滑胶皮,目镜屈光度调节旋转顺滑,进一步提升使用体验,内置1200毫安锂电充电系统,可测量1万次左右。Onick 2000B测距仪直观、方便、快捷的功能,助您户外开展工作更高效!
相位法激光测距的理论设计(综合最新版)
相位法激光测距的设计 电子工程学院 詹雪娇2017110459 史歌2017110481 - 1 -
- 1 -
第一章引言 激光,是一种自然界原本不存在的,因受激而发出的具有方向性好、亮度高、单色性好和相干性好等特性的光。物理学家把产生激光的机理溯源到1917年爱因斯坦解释黑体辐射定律时提出的假说,即光的吸收和发射可经由受激吸收、受激辐射和自发辐射三种基本过程[1]。 所谓激光技术,就是探索开发各种产生激光的方法以及探索应用激光的这些特性为人类造福的技术的总称。30多年来,激光技术得到突飞猛进的发展,利用激光技术不仅研制了各个特色的多种多样的激光器,而且随着激光应用领域不断拓展,形成了激光唱盘唱机、激光医疗、激光加工、激光全息照相、激光照排印刷、激光打印以及激光武器等一系列新兴产业。激光技术的飞速发展,使其成为当今新技术革命的先锋! 激光和普通光的根本不同在于它是一种有很高光子简并度的光。光子简并度可以理解为具有相同模式(或波型、位相、波长)的光子数目,即具有相同状态的光子数目。这些特性使激光具有良好的准直性及非常小的发散角,使仪器可进行点对点的测量,适应非常狭小和复杂的测量环境。激光测距仪就是利用激光良好的准直性及非常小的发散角度来测量距离的一种仪器。激光在A、B 两点间往返一次所需时间为t, 则A、B 两点间距离D 可表示为: D = c·t /2,式中, c为光在大气中传播的速度。由于光速极快, 对于一个不太大的D 来说, t是一个很小的量。如:假设D =15km, c = 3 ×105 km / s,则t = 5 ×10- 5 s。由测距公式可知,如何精确测量出时间t的值是测距的关键。 由于测量时间t的方法不同,便产生了两种测距方法:脉冲测距和相位测距。其中相位测距更加精确[1]。 - 3 -
激光测距仪使用方法
激光测距仪使用方法: 首先要给激光测距仪装上电池,直接充电的,使用前先把电充满。 然后每一个激光测电仪都会有一个电源开关。 通过目镜可看到测距仪处于待机状态,再次测量前还要选择好单位。 长按模式键,直接选择想要的单位。 通过测距仪目镜中的内部液晶屏显示,瞄准被测物体。 确定瞄准之后,轻按发射键。 如果被测物体不是很清晰,通过=/-2屈光度调节器,调节被测物体远近的清晰度。 最后通过顺转或逆转调节远近。 激光测距仪: 激光测距仪(Laser rangefinder),是利用调制激光的某个参数实现对目标的距离测量的仪器。激光测距仪测量范围为3.5~5000米。 按照测距方法分为相位法测距仪和脉冲法测距仪,脉冲式激光测距仪是在工作时向目标射出一束或一序列短暂的脉冲激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。相位法激光测距仪是利用检测发射光和反射光在空间中传播时发生的相位差来检测距离的。激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一,右图中,为典型的相位法测距仪和脉
冲法测距仪图。 激光测距仪是利用调制激光的某个参数对目标的距离进行准确测定的仪器。脉冲式激光测距仪是在工作时向目标射出一束或一序列短暂的脉冲激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从测距仪到目标的距离。 当发射的激光束功率足够时,测程可达40公里左右甚至更远,激光测距仪可昼夜作业,但空间中有对激光吸收率较高的物质时,其测距的距离和精度会下降。 世界上第一台激光器,是由美国休斯飞机公司的科学家梅曼于1960年,首先研制成功的红宝石激光器。美国军方很快就在此基础上开展了对军用激光装置的研究。1961年,第一台军用激光测距仪通过了美国军方论证试验,对此后激光测距仪很快就进入了实用阶段。 由于激光测距仪价格不断下调,工业上也逐渐开始使用激光测距仪。国内外出现了一批新型的具有测距快、体积小、性能可靠等优点的微型测距仪,可以广泛应用于工业测控、矿山、港口等领域。 激光是六十年代发展起来的一项新技术。它是一种颜色很纯、能量高度集中、方向性很好的光。激光测距仪是利用激光进行测距的一种仪器。它的作用原理很简单:通过测定激光开始发射到激光从目标反射回来的时间来测定距离。例如用激光测距仪来测量月球的距离,如果激光从开始发射到从月球反射回来的时间被测定为2.56秒,激光发射到月球的单程时间就等于1.28秒,而激光的速度是光速,等
激光测距仪使用说明
面积体积测量连续测量 加法(+)键测屋键准边犍退格/关机键 开启/测虽键 间接测虽 自动水平 自动垂直 减法(一)键 储存键 照明\单位切换键自动背光屏幕四行显示
前杲准测目-1.多种测呈起点------------------ VARIETY OF ?ASURM> SYARTMG PONT 设舀垦准线,可从机器的不同位巨作 为;IIS起点,滿足不同情况下对测= 的 要求,使测员更方像。 后慕准狙呈 「2.加减计算更简单 z-r uc T j□- n~tF :tic nmxhc =CX- 贴心便携手绳 ---------------- r6. "fUHS" OOJhl 来用耐用的尼龙材质.処虽时昉 止机器税酒.便于记录与携带。 目录 摘要 引言 (3) 1.1国内外研究现状 (3) 1.1.1国外研究现状 (4) 1.1.2国内研究现状 (5) 2.1课题主要研究内容 (5) 2.2相位法测距原理 (7) 3.1ΔΦ的测定 (11) 3.1.1 差频法测多普勒频移 (11) 4.1影响测量精度的因素及处理办法 (15) 5.1大气折射率误差 (18) 优点 (19) 参考文献 激光测距系统设计 摘要 本文主要介绍相位法激光测距基本原理, 详细论述了相位差的自动数字测量方法及其引起的误差.对单次检相的精度、频率漂移、大气折射率等对测距误差的影响进行了分析并提出了具体解决方法. 实现结果表明, 采用相位法测距精度可以达到±(5mm+5×10-6D)。 关键词: 激光测距; 相位; 精度 Abstract The authors introduce the basic principle of laser range finding technology based on phase, propound in detail the automatic digital measurement technique of phase difference and its errors, analyze the effect of single phase-picking precision frequency drift and atmosphere refractive index,etc. on laser ranging errors and put forward some special improvement methods The result of laser ranging realization show that 1 LH系列激光测距/测高仪 100Lh,400LH,600LH,800LH,1000LH激光测距仪 Opti-logic LH系列激光测距/测高仪将激光测距装置和垂直角度传感器合二为一,轻巧便携,操作简单。根据目标尺寸和反射性的不同,此系列手持式激光测距仪量程可1000米(1000LH型)。利用内置的电子倾斜传感器,请斜补偿激光测距仪可以对倾斜角度进行测量(精度达0.1度),进而可以得出目标物体的高度值。此系列激光测距/测高仪可以应用在树高测量、建筑施工、地质勘测、地产评估等多种应用领域。此系列产品适合于对精度要求不高,而对仪器成本有所限制的测量应用,经多年潜心设计而成,充分体现了美国在这个领域内的技术水平。 1.0 产品外观及功能特点 探物镜:通过探物镜的窗口可以将指示用的红光斑指向目标物体。 “Range”按钮:利用“Range”按钮可以进行测距操作或者选择工作模式。 显示:XT系列激光测距仪允许使用者随意选择显示单位,米、英尺或码。 电量过低指示:用于提示使用者及时更换电池。 自动关机:为降低能耗,测距仪会在测量完成后5秒钟自动关机。 2.0 基本操作 A.保持测距仪位于眼睛前1-2英寸处,通过探物镜来瞄准物体。 B.按住“Range”按钮,在探物镜中会出现一个红色亮点。将红色亮点对准目标物体。 C.保持测距仪指向目标物体,松开“Range”键。需要注意的是,在松开按键之前,测量光束是不会射出的。 D.当指示红点消失后便可读取距离值。 2.1 距离测量过程 Opti-Logic LH型激光测距仪发出不可见、对人眼无害的脉冲红外激光束。通过目标物体对激光束反射,测量光束往返的时间来得到待测的距离值。激光测距仪发出的激光束是不可见的带状垂直光束,这使得它测量细小的垂直物体的能力大大提高。LH型激光测距仪具有一种特有的锁定目标功能以降低光束偏离与背景环境相近的待测物体的可能,只需按住“range”按钮并在探物镜中保证红色指示光点对准待测物体即可。激光束会在松开按钮之后从测距仪中发出,这就保证使用者有足够的时间来通过探物镜内的红色指示光斑来锁定目标。为提高测量精度,测距仪的每次测量实际上都是由多次测量组成的,当获得足够的测量信息后,扬声器会发出声音提醒操作者,并将测量结果显示在液晶面板上。 激光测距仪所能测量的最大量程取决于待测目标的形状、大小、反射性、所处方向以及空气条件,目标的颜色和表面的涂漆色彩同样也会对量程产生影响。对于浅色的,反射面积较大的非光滑待测物体具有最佳的测量效果。垂直物体比水平物体更容易瞄准,白色物体的量程大于黑色物体,反射表面与光束方向垂直的物体要比表面方向偏离的物体更容易测量。对于那些特别对反射性予以设计的物体,能够获得最大的测量范围,这样的物品包括交通指示牌、街道标志牌以及Opti-Logic专用目标板等。需要特别注意的是,窗户和玻璃这样的光滑物体并不像想象的那样是理想的待测目标,恰恰相反,由于它们会把激光反射到光源以外的方向,反而会极大地增大测量的难度。 2.2 更换9伏电池 A.滑开测距仪前面的锁扣(朝透镜的方向)。 B.用拇指轻撬开电池盖。 C.拉动带子,电池就会滑出来。 D.更换电池。电池的放置方向在仪器上给出了示意。锁紧电池盖即完成操作。 2.3 模式选择 LH系列激光测距/测高仪允许操作者选择三种显示单位和四种测量模式,(1)测量到目标的直线距离,(2)测量水平距离,(3)测量目标物体的高度,(4)测量到目标物体的俯仰角度。在模式1、模式2和模式3中,操作者可以选则米或英尺或码作为单位。按住按钮10-12秒,看到显示内容发生变化后松开按钮将启动模式选择操作。连续按动按钮将滚动显示如下模式:模式1 –米(反射)-米(非反射);英尺(反射)-英尺(非反射);码(反射)-码(非反射);模式2-米-英尺-码;模式3-米-英尺-码;模式4。到达所需模式后停止按动按钮,相应模式在显示5秒后将自动选定并作为缺省模式。 模式1-直线距离测量。按住操作钮激活指示红点,将其对准待测物体,松开按钮使测距仪发出测量光束,保持测距仪不动直到红色指示光点消失,在液晶显示屏上读取数据。 模式2-水平距离测量(倾斜补偿模式)。按住操作钮激活指示红点,将其对准待测物体,松开按钮直到红色指示光点消失,然后在液晶显示屏上读取数据。 模式3-高度测量。这个功能的实现需要进行三次测量。首先,在待测物体的中部附近选定一个点,对于树木这样的目标最好是位于树干上,而不是旁枝上。按住按扭,“CEN”显示在屏幕上,将红色指示光电瞄准目标点,松开按钮,直至听到“哔哔”声。 目录 第一章引言 (2) 1.1激光测距技术 (2) 1.2激光测距的发展状况 (2) 第二章脉冲测距仪的工作原理 (4) 2.1测距仪的基本工作原理 (4) 2.2脉冲激光测距实现的原理及光电读数的实现方法 (5) 第三章部件分析 (7) 3.1激光器 (7) 3.2光电器件 (7) 第四章激光测距系统性能分析 (8) 4.1光脉冲对测距仪的影响 (8) 4.2发散角对测距仪的影响 (8) 4.3测距系统信噪比分析 (9) 第五章测距仪的精度分析 (10) 5.1精度分析 (10) 5.2提高脉冲激光测距精度的措施 (10) 第六章激光测距仪总体设计 (14) 总结 (16) 第一章引言 1.1 激光测距技术 激光测距是指根据激光往返待测距离的时间来测定距离的方法,激光测距技术是随着激光技术的出现而发展起来的一种精密测量技术,因其良好的测距性能而广泛应用在军事和民用领域。 自1960年美国T.H.Maiman博士制成世界上第一台红宝石激光器开始,激光优异的单色性、方向性和高亮度性就引起了人们的普遍关注。激光的这些特性,决定着它成为理想的测距光源。国内外均大力开展了激光测距系统的研制工作。1961年美国就成功的研制了世界上最早的红宝石激光测距系统,1969年美国又首次将激光测距系统应用于坦克火控系统。从此,激光测距技术发展迅猛,广泛的应用于战场上。 激光测距方法从原理上分主要有相位测距法和脉冲测距法两种。由于相位测量技术较为成熟,因此测距精度较高,目前的测距技术大多采用此法,但相位测距电路较为复杂,技术难度较大,测程短。脉冲式测距方法结构简单,信号易于处理,并且易于实现实时测量,具有测程长的优点,因此发展潜力很大。 1.2激光测距的发展状况 激光测距技术与其它测距技术相比,具有测量距离远、抗干扰能力强、非接触目标、测量速度快、测距精度高等特点。目前,脉冲激光测距已获得了广泛的应用,如地形测量、战术前沿测距、导弹运行轨道跟踪、以及人造卫星、地球到月球距离的测量等。随着激光技术、数字电子技术、计算技术和集成电路的发展,激光脉冲测距正朝着低成本、模块化、小型化方向发展。 脉冲半导体激光测距技术的研究起始于20世纪60年代末,到80年代中期陆续解决了激光器件、光学系统以及信号处理电路中的关键技术,80年代后期转入应用研究阶段并研制出了各种不同样机,90年代中期各种成熟的产品不断出现,近期半导体激光测距发展迅速,在中、近激光测距方面有取代YAG激光的趋势。 2008年,中国计量学院余向东、张在宣、王剑锋等人研制了一种能有效地减少因接收信号幅度变化而引起的漂移误差和晶振时钟计时误差的小型高精度脉激光测距系统设计
激光测距仪说明书
课程设计-脉冲激光测距仪