基于特征点相似度的匹配定位算法
F R E A K 特 征 点 匹 配 算 法 介 绍 ( 2 0 2 0 )
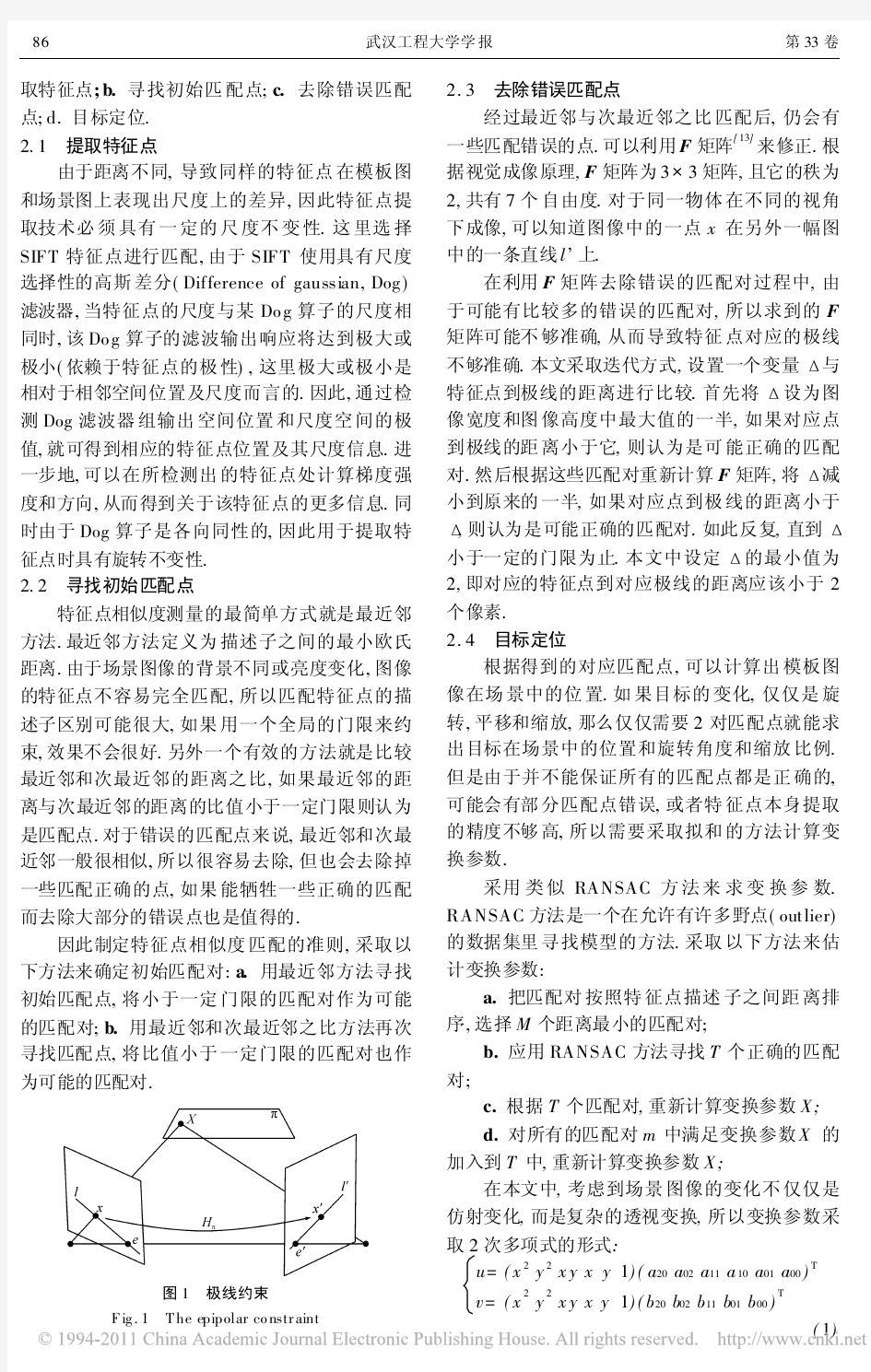
图像特征描述子之FREAK ?在前【给力追-女生资-源】面的博文中,介绍的BRIEF、ORB、BRISK 算法都是基于特征点周围邻域像素点对之间的比较,形成二进制编码串作为特征【QQ】描述子,这种描述方法计算速度快,且占用内存小,满足一些实时【⒈】应用场景的需求。对于这类特征描述子,关键是确定邻域哪些像【0】素点对进行比较,以及如何匹配。BRIEF算法中特征点邻域的像素【1】点对是随机采样生成的,ORB算法是通过贪婪穷举的方法,在所有【6】可能的像素点对中选取相关性较小的若干点对,BRISK则是采用平【9】均采样的方法生成若干采样点。特征匹配方法通常都是采样Ham【⒌】ming距离来进行度量,由于是二进制编码方式,可通过异或操作快速计【2】算。 特征点检【б】测 ?FAST算法可实现快速检测图像特征点,而且对应有一个加速版本AGAST,因此在诸多特征描述子中,都是首先通过FAST算法搜索定位特征点,再加以描述。FREAK同BRISK算法类似,也是建立多尺度空间,在不同尺度的图像上使用FAST算法检测特征点。 采样模式 ?FREAK算法中采样模式接近于人眼视网膜接收图像信息的采样模型,如下图所示,人眼视网膜中,Fovea区域主要对高精度的图像信息进行处理,而Para区域则主要对低精度的图像信息进行处理。
在FREAK的采样模式中,图中每一个黑点代表一个采样点,每个圆圈代表一个感受野,每个采样点需进行高斯模糊处理,以降低噪声影响,感受野的半径表示高斯模糊的标准差。这种采样模式与BRISK的不同之处在于,感受野之间存在重叠的区域;与BRIEF和ORB算法的不同之处在于,FREAK的采样点根据与特征点的距离远近,采用了不同大小的高斯核函数进行平滑处理。不同大小的感受野在人眼视网膜中也存在类似的结构,通过重叠的感受野,可以获得更多的信息,使最终的描述符更具独特性和可区分性。最终FREAK算法的采样结构为6、6、6、6、6、6、6、1,6代表每层中有6个采样点并且这6个采样点在一个同心圆上,一共有7个同心圆,最后的1表示特征点。 特征描述 ?FREAK算法同样采用二进制编码描述特征点,用FF表示编码特征 F=Σ0≤aN2aT(Pa) F=Sigma_{0 leq a < N} 2^a T(P_a) T(Pa)={1,I(Pr1a)I(Pr2a) 0,otherwise T(P_a) = begin{cases} 1,I(P_a^{r_1}) > I(P_a^{r_2}) 0,otherwise end{cases} 式中,I(Pr1a)I(P_a^{r_1})表示采样点经过高斯模糊后的灰度值。 ?FREAK的采样模式中一共有43个采样点,可以产生N=43(43?1)-2=903N = 43(43 - 1)-2 = 903个采样点对,有些采样点对的编码值对特征描述并没有实际作用,反而会造成特征冗余,因此需要对特征的描述向量进行筛选,也就是降维。原论文中采用与ORB中类似的贪婪
基于特征的图像匹配算法毕业设计论文(含源代码)
诚信声明 本人声明: 我所呈交的本科毕业设计论文是本人在导师指导下进行的研究工作及取得的研究成果。尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中不包含其他人已经发表或撰写过的研究成果。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 申请学位论文与资料若有不实之处,本人承担一切相关责任。 本人签名:日期:2010 年05 月20日
毕业设计(论文)任务书 设计(论文)题目: 学院:专业:班级: 学生指导教师(含职称):专业负责人: 1.设计(论文)的主要任务及目标 (1) 了解图象匹配技术的发展和应用情况,尤其是基于特征的图象匹配技术的发展和应用。 (2) 学习并掌握图像匹配方法,按要求完成算法 2.设计(论文)的基本要求和内容 (1)查阅相关中、英文文献,完成5000汉字的与设计内容有关的英文资料的翻译。(2)查阅15篇以上参考文献,其中至少5篇为外文文献,对目前国内外图象匹配技术的发展和应用进行全面综述。 (3)学习图象匹配算法,尤其是基于特征的图象匹配算法。 (4)实现并分析至少两种基于特征的图象匹配算法,并分析算法性能。 3.主要参考文献 [1]谭磊, 张桦, 薛彦斌.一种基于特征点的图像匹配算法[J].天津理工大学报,2006, 22(6),66-69. [2]甘进,王晓丹,权文.基于特征点的快速匹配算法[J].电光与控制,2009,16(2), 65-66. [3]王军,张明柱.图像匹配算法的研究进展[J].大气与环境光学学报,2007,2(1), 12-15.
图像中角点(特征点)提取与匹配算法
角点提取与匹配算法实验报告 1 说明 本文实验的目标是对于两幅相似的图像,通过角点检测算法,进而找出这两幅图像的共同点,从而可以把这两幅图像合并成一幅图像。 下面描述该实验的基本步骤: 1.本文所采用的角点检测算法是Harris 角点检测算法,该算法的基本原理是取以目标像素点为中心的一个小窗口,计算窗口沿任何方向移动后的灰度变化,并用解析形式表达。设以像素点(x,y)为中心的小窗口在X 方向上移动u ,y 方向上移动v ,Harris 给出了灰度变化度量的解析表达式: 2 ,,|,|,,()(x y x y x u y v x y x y I I E w I I w u v o X Y ??= -=++??∑∑ (1) 其中,,x y E 为窗口内的灰度变化度量;,x y w 为窗口函数,一般定义为2 2 2 ()/,x y x y w e σ +=; I 为图像灰度函数,略去无穷小项有: 222222 ,,[()()2]2x y x y x y x y E w u I v I uvI I Au Cuv Bv = ++=++∑ (2) 将,x y E 化为二次型有: ,[]x y u E u v M v ?? =???? (3) M 为实对称矩阵: 2 ,2 x y x x y x y y I I I M w I I I ???= ???????∑ (4) 通过对角化处理得到: 11 ,200x y E R R λλ-??= ??? (5) 其中,R 为旋转因子,对角化处理后并不改变以u,v 为坐标参数的空间曲面的形状,其特征值反应了两个主轴方向的图像表面曲率。当两个特征值均较小时,表明目标点附近区域为“平坦区域”;特征值一大一小时,表明特征点位于“边缘”上;只有当两个特征值均比较大时,沿任何方向的移动均将导致灰度的剧烈变化。Harris 的角点响应函数(CRF)表达式由此而得到: 2 (,)det()(())C RF x y M k trace M =- (6)
SIFT特征点提取与匹配算法
SIFT 特征点匹配算法 基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection ); ② 精确关键点定位(Keypoint localization ) ③ 关键点主方向分配(Orientation assignment ) ④ 关键点描述子生成(Keypoint descriptor generation ) ⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching ) 1.1 尺度空间极值检测 特征关键点的性质之一就是对于尺度的变化保持不变性。因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。 Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即: ),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221 ),,(σπσσy x e y x G +-= 在实际应用中,为了能相对高效地计算出关键点的位置,建议使用的是差分高斯函数(difference of Gaussian )(,,)D x y σ。其定义如下: ) ,,(),,() ,()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2) 如上式,D 即是两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
SIFT特征点提取与匹配算法
二 特征点提取算法 1、基于SIFT (Scale Invariant Feature Transform )方法的图像特征匹配 参看David G. Lowe 的“Distinctive Image Features from Scale-Invariant Keypoints ” 基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection ); ② 精确关键点定位(Keypoint localization ) ③ 关键点主方向分配(Orientation assignment ) ④ 关键点描述子生成(Keypoint descriptor generation ) ⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching ) 1.1 尺度空间极值检测 特征关键点的性质之一就是对于尺度的变化保持不变性。因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。 Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即: ),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221 ),,(σπσσy x e y x G +-= 在实际应用中,为了能计算的相对高效,所真正使用的是差分高斯尺度空间(difference of Gaussian )(,,)D x y σ。其定义如下: ) ,,(),,() ,()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2) 如上式,D 即是由两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
基于模板匹配算法的数字识别讲解
中南民族大学 毕业论文(设计) 学院: 计算机科学学院 专业: 软件工程年级:2009 题目: 基于模板匹配算法的数字识别学生姓名: 李成学号:09065093指导教师姓名: 李波职称: 讲师 2013年5月
中南民族大学本科毕业论文(设计)原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。 作者签名:2013年月日
摘要 (1) Abstract (1) 1 绪论 (2) 1.1 研究目的和意义 (2) 1.2 国内外研究现状 (2) 2 本文基本理论介绍 (3) 2.1 位图格式介绍 (3) 2.2 二值化 (3) 2.3 去噪 (3) 2.4 细化 (4) 2.5 提取骨架 (4) 3 图像的预处理 (5) 3.1 位图读取 (5) 3.2 二值化及去噪声 (5) 3.3 提取骨架 (6) 4 基于模板匹配的字符识别 (8) 4.1 样本训练 (8) 4.2 特征提取 (8) 4.3 模板匹配 (9) 4.4 加权特征模板匹配 (10) 4.5 实验流程与结果 (10) 5 结论 (16) 5.1 小结 (16) 5.2 不足 (16) 6 参考文献 (17)
基于模板匹配算法的数字识别 摘要 数字识别已经广泛的应用到日常生活中,典型的数字自动识别系统由图像采集、预处理、二值化、字符定位、字符分割和字符识别等几部分组成, 这些过程存在着紧密的联系。传统的模板匹配算法因为图像在预处理之后可能仍然存在较大的干扰,数字笔画粗细不均匀,有较大的噪声,识别效率不高。本文采的主要思想就是对字符进行分类,之后对字符进行细化,提取细化后字符的特征矢量,与模板的特征矢量进行加权匹配,误差最小的作为识别结果。本文在模板匹配法的基础上, 采用了特征值加权模板匹配法, 并且改进了匹配系数的求法。应用该法取得了满意的效果, 提高了识别率。 关键词:模板匹配;数字识别;特征值加权;字符识别; Template matching algorithm-based digital identification Abstract Digital identification has been widely applied to daily life, the typical digital automatic identification system by the image acquisition, pre-processing, binarization, character positioning, character segmentation and character recognition several parts, there is a close link these processes. Traditional template matching algorithm because the image may still exist after pre-greater interference, digital strokes uneven thickness, the noise, the identification efficiency is not high. Adopted herein main idea is to classify the character after character refinement, the characters feature vector extraction refinement, and the template feature vector is weighted matching, the minimum error as a recognition result. Template matching method based on feature weighted template matching method, and improve the matching coefficient method. The application of the method to obtain satisfactory results, to improve the recognition rate. Key words:Template matching; digital identification; characteristic value weighted; character recognition;
F R E A K 特 征 点 匹 配 算 法 介 绍 ( 2 0 2 0 )
三个描述符的比较:SURF,FREAK和BRISK =================分割线================= 我认为从事对象识别,图像注册和使用关键点提取的其他领域的开发人员和研究人员可以发现这个帖子很有用。最近(从2.4.2),一个新的特征描述符算法被添加到OpenCV库中。据称FREAK描述符优于ORB和SURF描述符,但速度非常快(与ORB相当)。也有人在我的博客上的评论提到BRISK描述符,这是比SURF更新,更高效。那么,最后我找到一个时间来比较他们,并发表我的研究成果。 这篇文章与我过去的OpenCV比较报告非常相似。虽然这些报告是多年前发表的,但它们还是有些实际的。对于这个测试,我决定从头开始重写整个测试框架。源代码即将可用。但现在,让我解释我做了什么来找到最好的三种算法。将图像转换为描述符的主要目标是什么?从像素域移动到更紧凑的表示形式相同的数据。此外,我们希望我们的表示是旋转和比例不变的(例如,当源图像旋转或缩放时,表示保持不变或略微变化)。SURF,FREAK和BRISK描述符宣称它们是旋转和尺度不变的。 ========================分割线============================== 就像在OpenCV比较报告中一样,测试应用程序与测试模式图像一起工作。我们有四个基本的转换:旋转,缩放,模糊和亮度调整。这里是如何旋转转换类看起来像:
class ImageRotationTransformation : public ImageTransformation ImageRotationTransformation(float startAngleInDeg, float endAngleInDeg, float step, cv::Point2f rotationCenterInUnitSpace) : ImageTransformation("Rotation") , m_startAngleInDeg(startAngleInDeg) , m_endAngleInDeg(endAngleInDeg) , m_step(step) , m_rotationCenterInUnitSpace(rotationCenterInUnitSpace) -- Fill the arguments for (float arg = startAngleInDeg; arg = endAngleInDeg; arg += step) m_args.push_back(arg); virtual std::vector getX() const return m_args; virtual void transform(float t, const cv::Mat source, cv::Mat result) const cv::Point2f center(source.cols * m_rotationCenterInUnitSpace.x, source.cols * m_rotationCenterInUnitSpace.y);
基于内容的推荐算法
基于内容的推荐算法(Content-Based Recommendation)1.基本思想 基本思想就是给用户推荐与他们曾经喜欢的项目内容相匹配的新项目。 基于内容的推荐的基本思想是:对每个项目的内容进行特征提取(FeatureExtraction),形成特征向量(Feature Vector);对每个用户都用一个称作用户的兴趣模型(User Profile)的文件构成数据结构来描述其喜好;当需要对某个用户进行推荐时,把该用户的用户兴趣模型同所有项目的特征矩阵进行比较得到二者的相似度,系统通过相似度推荐文档。 (基于内容的推荐算法不用用户对项目的评分,它通过特定的特征提取方法得到项目特征用来表示项目,根据用户所偏好的项目的特征来训练学习用户的兴趣模型,然后计算一个新项目的内容特征和用户兴趣模型的匹配程度,进而把匹配程度高的项目推荐给用户。) 2.基于内容的推荐层次结构图:
CB的过程一般包括以下三步: (1)Item Representation:为每个item抽取出一些特征(也就是item的content 了)来表示此item;对应着上图中的Content Analyzer。 (2)Profile Learning:利用一个用户过去喜欢(及不喜欢)的item的特征数据,来学习出此用户的喜好特征(profile);对应着上图中的Profile Learner。 (3)Recommendation Generation:通过比较上一步得到的用户profile与候选item 的特征,为此用户推荐一组相关性最大的item。对应着上图中的Filtering Component。 3.详细介绍上面的三个步骤: 3.1 Item Representation 项目表示:对项目进行特征提取,比如最著名的特征向量空间模型,它首先将一份文本(项目)以词袋形式来表示,然后对每一个词用词频-逆向文档频率(TF-IDF)来计算权重,找出若干权重较大的词作为关键词(特征)。每个文本(项目)都可以表示成相同维度的一个向量 TF-IDF词频-逆文档频率计算: TF 词项t在文档d中出现的次数,df 表示词项t在所有文档出现的次数,idf 为反向文档频率,N为文档集中所有文档的数目。 TF-IDF公式同时引入词频和反向文档频率,词频TF表示词项在单个文档中的局部权重,某一词项在文档中出现的频率越高,说明它区分文档内容的属性越强,权重越大。IDF表示词项在整个文档集中的全局权重,某一词项在各大文档都有出现,说明它区分文档类别属性的能力越低,权值越小。
F R E A K 特 征 点 匹 配 算 法 介 绍
图像局部特征(一)--概述 本文根据下面这篇文章,做下简单修改。 研究图像特征检测已经有一段时间了,图像特征检测的方法很多,又加上各种算法的变形,所以难以在短时间内全面的了解,只是对主流的特征检测算法的原理进行了学习。总体来说,图像特征可以包括颜色特征、纹理特等、形状特征以及局部特征点等。其中局部特点具有很好的稳定性,不容易受外界环境的干扰,本篇文章也是对这方面知识的一个总结。 1. 局部特征点 图像特征提取是图像分析与图像识别的前提,它是将高维的图像数据进行简化表达最有效的方式,从一幅图像的M×N×3?M×N×3的数据矩阵中,我们看不出任何信息,所以我们必须根据这些数据提取出图像中的关键信息,一些基本元件以及它们的关系。 局部特征点是图像特征的局部表达,它只能反正图像上具有的局部特殊性,所以它只适合于对图像进行匹配,检索等应用。对于图像理解则不太适合。而后者更关心一些全局特征,如颜色分布,纹理特征,主要物体的形状等。全局特征容易受到环境的干扰,光照,旋转,噪声等不利因素都会影响全局特征。相比而言,局部特征点,往往对应着图像中的一些线条交叉,明暗变化的结构中,受到的干扰也少。 而斑点与角点是两类局部特征点。斑点通常是指与周围有着颜色和灰度差别的区域,如草原上的一棵树或一栋房子。它是一个区域,
所以它比角点的噪能力要强,稳定性要好。而角点则是图像中一边物体的拐角或者线条之间的交叉部分。 2. 斑点检测原理与举例 2.1 LoG与DoH 斑点检测的方法主要包括利用高斯拉普拉斯算子检测的方法(LOG),以及利用像素点Hessian矩阵(二阶微分)及其行列式值的方法(DOH)。 LoG的方法已经在斑点检测这入篇文章里作了详细的描述。因为二维高斯函数的拉普拉斯核很像一个斑点,所以可以利用卷积来求出图像中的斑点状的结构。 DoH方法就是利用图像点二阶微分Hessian矩阵: H(L)=[L?xx?L?xy?L?xy?L?yy?]?H(L)=[LxxLxyLxyLyy] 以及它的行列式的值DoH(Determinant of Hessian): det=σ?4?(L?xx?(x,y,σ)L?yy?(x,y,σ)?L?2?xy?(x,y,σ))?de t=σ4(Lxx(x,y,σ)Lyy(x,y,σ)?Lxy2(x,y,σ)) Hessian矩阵行列式的值,同样也反映了图像局部的结构信息。与LoG相比,DoH对图像中的细长结构的斑点有较好的抑制作用。 无论是LoG还是DoH,它们对图像中的斑点进行检测,其步骤都可以分为以下两步: 1)使用不同的σ?σ生成(?2?g?x?2?+?2?g?y?2?)?(?2g?x2+?2g?y2) 或?2?g?x?2?,?2?g?y?2?,?2?g?x?y?2g?x2,?2g?y2,?2g?x?y模板,并
基于特征值的模式匹配算法
宜宾学院学报 Journal of Yibin University 优先数字出版 —————————————————————— 收稿日期:2014-07-03 2014-09-05 基金项目:安徽电子信息职业技术学院教科研项目“基于数据挖掘技术的高职院校招生决策系统研究与应用” (ADZX1306) 作者简介:余飞(1983-),男,硕士,讲师,研究方向为计算机网络安全、数据挖掘、分布式操作系统 网络出版时间: 网络出版地址: 基于特征值的模式匹配算法 余 飞,刘思宏 (安徽电子信息职业技术学院 软件学院,安徽蚌埠233060) 摘 要:模式匹配算法广泛应用于防火墙、入侵检测等网络安全领域,其算法效能直接影响到系统的工作效率.本文首次提出了一种基于特征值的模式匹配算法——FLC (First-Last-Characters )算法.该算法打破了经典算法有序偏移的思想,突破了BMHS (Boyer-Moore-Horspool-Sunday )算法最大偏移量(m+1)的上限,从而增大了偏移距离,减 则匹配成功;若有一个字符不同,则匹配不成功,模式串向右移动一个字符的位置,继续比较,直到将文本串的所有位都比较过来.BF 算法实现简单,但模式串每次仅偏移一个字符,这导致模式串几乎要与文本串中的每一个字符进行比较,运行效率极其低下. KMP 算法[2]是BF 的一种改进算法,该算法由Knuth 等人提出.KMP 算法根据给定的模式串,定义一个next 函数.模式串与文本串按顺序进行从左到右匹配, 2014-09-12 13:00 https://www.360docs.net/doc/7015077663.html,/kcms/detail/51.1630.Z.20141211.1054.008.html
一种基于直方图统计特征的直方图匹配算法的研究_朱磊
收稿日期:2004-01-21 作者简介:朱磊(1973— ),男,江苏南京人,工学博士,讲师,研究方向:多媒体信息处理与通信网络管理。文章编号:1003-6199(2004)02-0048-04 一种基于直方图统计特征的直方图匹配算法的研究 朱 磊 (解放军理工大学通信工程学院,江苏南京 210007) 摘 要:本文提出并验证了基于直方图统计特征的直方图匹配算法。直方图作为对图像 颜色或灰度分布的一种基本描述量,利用其统计特征进行直方图之间的相似性度量。实验结果表明,在获得相同查准率的情况下,利用直方图统计特征量测算的算法比经典的欧氏距离测算算法具有更高的查全率。 关键词:直方图;匹配算法;统计特征中图分类号:TP391 文献标识码:A The Application of Digital Library T echnology in the Integrated Management Platform for Military Information ZHU Lei (Institute of Communication Engineering ,PLAUST ,Nanjing ,210007,China ) Abstract :In this paper ,the histogram ’s matching that based on the histogram ’s statistical characteriza 2tion was put forward and implemented.As a basic descriptor of the distribution of color or gray ,histogram ’s statistical characterization was used to compute the similarity between each other.The experimental result in 2dicates that when compared with the classical Euclidean distance measure method ,the new matching algo 2rithm can achieve a higher recall and the same precision. K ey w ords :histogram ;matching algorithm ;statistical characterization 1 引言 在对图像颜色特征的描述上,直方图(his 2togram )是一个非常有效的工具。直方图描述了图像颜色的统计分布特征,且具有平移、尺度和旋转的不变性,因此在颜色检索中被广泛采用。经典的直方图匹配算法是计算直方图之间的欧氏距离,在这种计算方法中,对直方图之间的相似度测量是按照矢量距离测量的思路进行的。本文采用随机变量的数字特征分析方法,利用直方图的统计特征进行直方图之间的相似性度量,将直方图随机变量的均值、方差和K olmogorov -Smirnov 检测量结合起 来,利用三者的加权和来代替欧氏距离判决公式, 对两幅图像的直方图之间的相似性进行度量。本文对这部分的工作进行了实验比较,实验结果表明,在获得相同查准率的情况下,利用直方图统计特征量测算的算法比经典的欧氏距离测算算法具有更高的查全率。 2 基于随机变量统计特征的直方图匹配算法 灰度直方图是灰度级的函数,它表示图像中具有每种灰度级的像素的个数,反映图像中每种灰度出现的频率。如图1所示,灰度直方图的横坐标是灰度级,纵坐标是该灰度级出现的频率,是图像最 第23卷第2期2004年6月 计 算 技 术 与 自 动 化Computing Technology and Automation Vol 123,No 12 J un 12004
基于统计特征的模式匹配算法
基于统计特征的模式匹配算法 摘要 针对传统模式匹配算法的按模式中字符排列顺序匹配的过程,该算法模拟人脑思维利用模式中字符出现频率、位置等特征信息建立了一个新的匹配序列,打乱了原来的顺序匹配过程,从而在匹配过程中,利用特征信息尽可能的跳过更多的字符,从而达到比较高的匹配效率。该算法的另一大特点就是不需要遍历完所有文本中的字符就可以找出与模式匹配的字符串。与传统的BF、KMP、BM 等算法相比,该算法的平均时间复杂度已经达到了他们的最好情况。 关键词:模式匹配;算法;统计特征
Abstract The difference to the traditional Algorithm of String-Matching is this algorithm uses the statistic characteristic of the position and frequency of the char to build a new matching list. During the process of the matching, this algorithm will try its best to use this characteristic to skip much more chars to improve the efficiency of the matching. Another characteristic of this Algorithm is it can successfully finish without comparing all chars in the Text. Comparing with the Algorithm before, like BF ,KMP, BM, this Algorithm’s average complication of time reaches then best condition of these. Keywords: string-matching; algorithm; statistic characteristic
图像特征特点及常用的特征提取与匹配方法
图像特征特点及常用的特征提取与匹配方法 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1) 颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2) 颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡 的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3) 颜色矩
特征点检测算法
特征点检测算法 一、SIFT(Scale Invariant Feature Transform)算法基本原理及主要特征 1、SIFT 算法基本原理 SIFT 算子是图像匹配算法中性能较好的算子,基于SIFT 算法的特征图像配准可大致分为特征的检测、描述和匹配。特征检测是在尺度空间中进行的,首先生成图像尺度空间,然后检测尺度空间中的局部极值点,再通过剔除低对比度点和边缘响应点对局部极值点进行精确定位;在对特征进行描述时,先计算每个极值点的主方向,对极值点为中心的区域进行直方图梯度方向统计,生成特征描述子;最后,通过特征描述子寻找匹配的特征,建立图像之间的联系。 1.1关键点的检测 高斯卷积核是实现尺度变换的唯一线性变换核,一幅图像在尺度空间中可表示为图像和可变高斯核函数的卷积,采用高斯金字塔(LaplacianofGaussian ,LoG )算子表示如下: (,,)(,,)(,)L x y G x y I x y σσ=? 其中,I(x,y)为输入的二维图像,222()/221 (,,)2x y G x y e σσπσ-+=为可变高斯核函数,σ为可 变核。 图像尺度空间的形成是通过将图像与具有可变核的高斯滤波器进行卷积,从而得到图像的高斯金字塔LoG 。David 指出,高斯金字塔LoG 共分为O 组,每组S+3层,S 为σ与2σ之间的层数,S 一般取2或3。每组的高斯金字塔的形成是通过输入图像与级联滤波器进行卷积得到,下面以S=2为例,对高斯金字塔LoG 的形成过程进行详细说明。 当S=2时,每组的高斯金字塔共有5层,共由四级的级联滤波器得到。对于第一组的高斯金字塔LoG 形成过程如下图所示: 图1-1 级联滤波器的构造 如图所示,输入图像0I 由初始图像I 经高斯核为σ的滤波器得到,输出图像i I (i=1,…,4)由输入图像0I 分别经级联滤波器Ⅰ、Ⅱ、Ⅲ和Ⅳ得到。第一组高斯金字塔LoG 为图1中虚线包括的五幅图像(0,1,...,4)i I i =,每幅图像对应的高斯核为(0,1,...,4)i k i σ=,表示图像(0,1,...,4)i I i =可看成初始图像I 经核为(0,1,...,4)i k i σ=的高斯函数得到。 第二组高斯金字塔LoG 的每层图像大小都是第一组高斯金字塔LoG 中图像大小的1/4,其输入图像是第一组高斯金字塔LoG 中第S 层图像经采样率为2的采样过程得到。当S 取
基于模板匹配算法的人体目标检测
目录 1引言 (2) 1.1课题来源及意义 (2) 1.2国内外发展状况 (2) 1.3主要研究目标、内容及方法 (2) 1.3.1研究目标 (2) 1.3.2研究内容 (2) 1.3.3研究方法 (3) 1.4可行性分析 (3) 2相关知识 (4) 2.1MATLAB软件 (4) 2.2数字图像处理 (4) 3边缘图像处理 (5) 3.1流程图 (5) 3.2边缘图像处理MATLAB编程及仿真 (5) 3.3分析总结 (9) 4模板匹配 (11) 4.1模板匹配 (11) 4.2模板匹配的实现与仿真 (11) 4.3分析总结 (11) 5总结 (13)
1引言 1.1课题来源及意义 图像是人们从客观世界获取信息的重要来源;图像信息处理是人类视觉延续的重要手段;数字图像处理技术对国计民生有重要意义。随着计算机技术及其它技术的发展,数字图像处理技术的应用越来越广泛,已渗透到各个领域[1]。 随着社会的发展,人体目标的检测与分析在图像处理与计算机视觉领域越来越受到关注,成为计算机视觉的一个重要组成部分。该领域的研究有着广泛的应用价值,可应用于智能安全监控、人机接口、虚拟现实、人机交互、人体运动分析理解等方面[2]。在民用上,常与报警系统协力完成入侵目标的检测与跟踪;在军事上,常用以对空监视中实时多目标跟踪、机载或弹载前视图像制导、导弹动态测量等方面。不但能够高效地完成保障安全的任务,还能节省大量的人力物力,具有广阔的应用前景及可观的经济利益。 因此,利用数字图像的模板匹配算法获取图像中人体目标区域位置,通过MATLAB软件进行仿真实验的研究便成为一个具有挑战性和重要意义的课题。1.2国内外发展状况 目前,世界范围内有许多科研机构都专门设立了人体目标检测和识别研究方向。国际上著名的机构有美国卡耐梅隆大学的机器人研究所、美国麻省理工大学的媒体试验与人工智能实验室、英国Surrey大学视觉、语音和信号处理研究所、美国Illinois大学的Beckman研究所、法国的INRIA研究院、瑞士的IDIAP 研究院、日本ART研究所等。美国的Visionics公司的FaceIt和Viisage公司等,在应用领域已经比较成熟[3]。 国内的清华大学、北京大学、中国科计大学、中国科学院自动化所等开展了相关研究,并取得一定成就。一些有关人体目标检测和研究的会议和知名专刊在该领域内的刊载每年都很多。国内的中科模式科技公司和清华大学等都在开展相关工作。但目前,多数人体检测和识别算法的有效性还尚在实验室阶段,一些产品也都是要求人体或人体的某些部位在一个高信噪比的图像序列下才有较好的识别成功率。而实际应用往往是更复杂的背景环境和低质量的数字视频序列。1.3主要研究目标、内容及方法 1.3.1研究目标 (1)利用数字图像的模板匹配算法获取图像中人体目标区域位置; (2)用MATLAB软件仿真进行实验,要求有较高的检测准确率。 1.3.2研究内容
基于块匹配算法的运动估计
基于块匹配算法的运动估计 摘要:本文首先介绍了运动估计和块匹配的概念和思想,然后详细介绍了块匹配的搜索算法。最后根据块匹配算法的运动估计给出了一个设计。 关键字:运动估计,块匹配,算法 1 研究背景 随着现代信息社会对通信业务要求的不断增长,图像通信与通信网容量的矛盾日益突出,尤其是具有庞大数据量的视频图像通信,更是很难传输和存储,极大的制约了图像通信的发展。例如,按CCIR601建议,普通质量的电视信号数字视频的码率约为216Mbit/s,而高清晰度电视HDTV则在1.2Gb/s以上,如果没有高效率的压缩技术,则难以传输和存储。而运动检测与估计不仅是军事领域中目标探测与跟踪的有效技术之一,同时也是视频图象编码与压缩的常用方法与核心技术。因此,该项研究对于复杂背景下的目标探测以及视频处理均具有重要的应用价值。 运动估计和运动补偿是紧密联系的,它是视频图像压缩编码中使用的一项核心技术,很好的解决了视频图像中时间冗余的问题,经验表明,实用化的压缩方法可以将运动图像数据压缩30倍而不失真。运动估计技术主要分为两大类:象素递归法和块匹配法。考虑到计算复杂度和实时性要求,块匹配法已成为目前最常用的方法。显然,要想获得好的运动补偿,关键是要有准确的运动估计,因此运动估计算法的研究成为视频压缩算法的研究重点。运动估计研究的主要内容就是如何快速、有效的获得有足够精度的运动矢量。即把前一帧的运动部分根据运动矢量补过来,同时用其它方法得到其剩余的不同部分的过程称为运动补偿(Motion Compensation,MC)。就这样,采用运动估计和补偿可以有效地去除视频信号在时间方向的重复信息,达到压缩的目的。其中,在这方面的一种有效方法就是块匹配运动估计BMME(Block-Matching Motion Estimation),它目前已被许多视频编码标准所采纳。为了提高搜索速度和效率,目前研究最多的是基于块匹配(Block Matching,BM)的快速搜索算法,例如三步法,四步法,二维对数法,菱形法等。 随着计算机网络的普及和发展,很多信息可以通过网络实现共享。形色兼具