丝杠螺母传动机构学习资料
丝杠螺母传动机构
丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。有以传递能量为主的(如螺旋压力机、千斤顶等);也有以传递运动为主的如机床工作台的进给丝杠);还有调整零件之问相对位置的螺旋传动机构等。
丝杠螺母机构有滑动摩擦机构和滚动摩擦机构之分。滑动丝杠螺母机构结构简单,加工方便,制造成本低,具有自锁功能,但其摩擦阻力矩大、传动效率低(30%~40%)。滚珠丝杠螺母机构虽然结构复杂、制造成本高,不能自锁,但其最大优点是摩擦阻力矩小、传动效率高(92%~98%),精度高,系统刚度好,运动具有可逆性,使用寿命长,因此在机电一体化系统中得到大量广泛应用。本节主要介绍滚珠丝杠螺母机构。
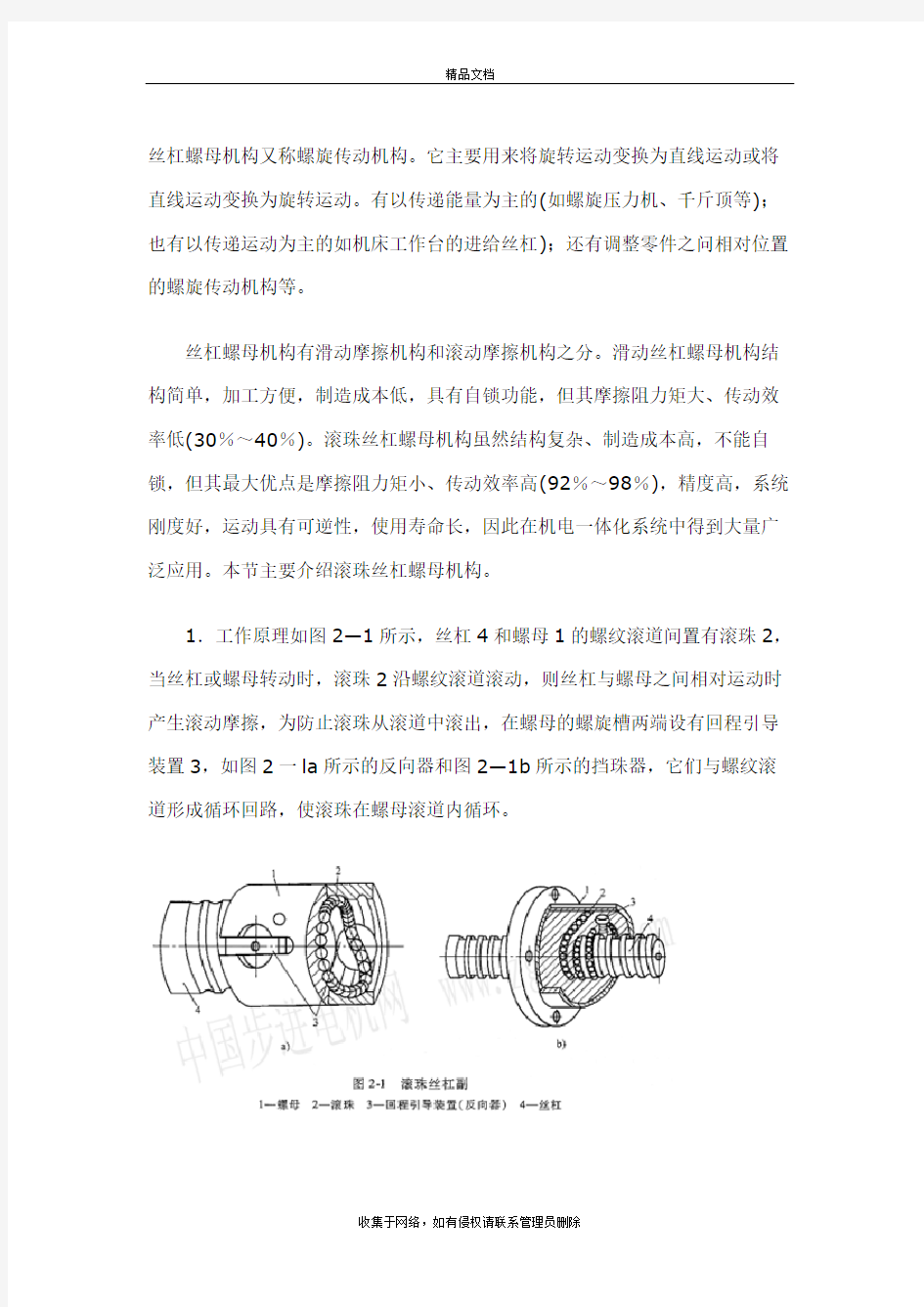
1.工作原理如图2—1所示,丝杠4和螺母1的螺纹滚道间置有滚珠2,当丝杠或螺母转动时,滚珠2沿螺纹滚道滚动,则丝杠与螺母之间相对运动时产生滚动摩擦,为防止滚珠从滚道中滚出,在螺母的螺旋槽两端设有回程引导装置3,如图2一la所示的反向器和图2—1b所示的挡珠器,它们与螺纹滚道形成循环回路,使滚珠在螺母滚道内循环。
2.传动形式根据丝杠和螺母相对运动的组合情况,其基本传动形式有如图2—2所示的四种类型。
(1)螺母固定、丝杠转动并移动如图2—2a所示,该传动形式因螺母本身起着支承作用,消除了丝杠轴承可能产生的附加轴向窜动,结构较简单,可获得较高的传动精度。但其轴向尺寸不宜太长,否则刚性较差。因此只适用于行程较小的场合。
(2)丝杠转动、螺母移动如图2-2b所示,该传动形式需要限制螺母的转动,故需导向装置。其特点是结构紧凑,丝杠刚性较好。适用于工作行程较大的场合。
(3)螺母转动、丝杠移动如图2_2c所示,该传动形式需要限制螺母移动和丝杠的转动,由于结构较复杂且占用轴向空间较大,故应用较少。
(4)丝杠固定、螺母转动并移动如图2—2d所示,该传动方式结构简单、紧凑,但在多数情况下使用极不方便,故很少应用。
此外,还有差动传动方式,其传动原理如图2_3所示。该方式的丝杠上有基本导程(或螺距)不同的(如L01、L02)两段螺纹,其旋向相同。当丝杠2转动时,可动螺母1的移动距离s=n(L01-L02)(n为丝杠转速),如果两基本导程的大小相差较少,则可获得较小的位移s。因此,这种传动方式多用于各种微动机构中。
3.结构类型
(1)螺纹滚道截面形状我国生产的滚珠丝杠副的螺纹滚道有单圆弧型和双圆弧型,如图2—4所示。滚道型面与滚珠接触点的法线同丝杠轴向的垂线间的夹角α称为接触角,般为45°。单圆弧型的螺纹滚道的接触角随轴向载荷大小的变化而变化,这主要由轴向载荷所引起的接触变形的大小而定。α大时,传动效率、轴向刚度以及承载能力也随之增大。由于单圆弧型滚道加工用砂轮成形较简单,故容易得到较高的加工精度。单圆弧型面的滚道圆弧半径R应稍
大于滚珠半径rb
双圆弧滚道其接触角α在工作过程中基本保持不变,故效率、承载能力和轴向刚度比较稳定。滚道底部与滚珠不接触,其空隙可存储一定的润滑油和脏物,以减小摩擦和磨损。
但磨削滚道砂轮修正、加工和检验都比较困难。
滚道的半径R与滚珠半径rb的比值对承载能力有很大的影响,我国采用R/rb为1.04和1 11两种。
(2)滚珠的循环方式
1)内循环。内循环方式的滚珠在循环过程中始终与丝杠表面保持接触,如图2—1a所示。在螺母1的侧面孔内装有接通相邻滚道的反向器3,利用反向器引导滚珠2越过丝杠4的螺旋顶部进入相邻滚道,形成一个循环回路。一般在同一螺母上装有2~4个滚珠用反向器,并沿螺母圆周均匀分布。内循环方式的优点是滚珠循环的回路短,流畅性好,效率高,螺母的径向尺寸也较小。其缺点是反向器加工困难,装配、调试也不方便。
浮动式反向器的内循环滚珠丝杠螺母副如图2—5所示。其结构特点是反向器1与滚珠螺母上的安装孔有O.0l~0.015mm的配合间隙,反向器弧面上加工有圆弧槽,槽内安装拱形片簧4,外有弹簧套2,借助拱形片簧的弹力,始终给反向器一个径向推力,使位于回珠圆弧槽内的滚珠与丝杠3表面保持一定的压力,从而使槽内滚珠代替了定位键而对反向器起到自定位作用。这种反向器的优点是:在高频浮动中达到回珠圆弧槽进出口的自动对接,通道流畅,摩擦特性较好,更适用于高速、高灵敏度、高刚性的精密进给系统。
2)外循环。滚珠在循环返向时,有一段脱离丝杠螺旋滚道,在螺母体内或体外作循环运动。按结构形式可分为螺旋槽式、插管式和端盖式三种。
①螺旋槽式。如图2—6所示,在螺母2的外圆柱表面上铣出螺旋凹槽,槽的两端钻出两个通孔与螺旋滚遭相切,螺旋滚道内装入两个挡珠器4引导滚
珠3通过这两个孔,同时用套筒l盖住凹槽,构成滚珠的循环回路。这种结构的特点是工艺简单,径向尺寸小,易于制造,但是挡珠器刚性差,易磨损。
②插管式。如图2_7所示,用一弯管l代替螺旋凹槽,弯管的两端插入与螺纹滚道5相切的两个内孔,用弯管的端部引导滚珠4进入弯管,构成滚珠的循环回路,再用压板2和螺钉将弯管固定。插管式结构简单,容易制造,但是径向尺寸较大,弯管端部用作挡珠器比较容易磨损。
③端盖式。如图2—8所示,在螺母1上钻出纵向孔作为滚子回程滚道,螺母两端装有两块扇形盖板或套筒2,滚珠的回程道口就在盖板上。滚道半径为滚珠直径的1.4~1.6倍。
这种方式结构简单、工艺性好,但滚道吻接和弯曲处圆角不易准确制作而影响其性能,故应习较少。常以单螺母形式用做升降传动机构。
4.主要尺寸参数如图2—9所示,滚珠丝杠副的主要尺寸参数有:
公称直径d0:指滚珠与螺纹滚道在理论接触角状态时包络滚珠球心的凰柱直径,它是滚珠丝杠副的特征尺寸。
基本导程LO(或螺距t):指丝杠相对螺母旋转2π弧度时,螺母上基准点的轴向位移。
行程l:指丝杠相对于螺母旋转任意弧度时,螺母上基准点的轴向位移。
此外还有丝杠螺纹大径d1丝杠螺纹小径d1、滚珠直径db螺母螺纹大径D、螺母螺纹小径D1、丝杠螺纹全长ls等。
基本导程的大小应根据机电一体化系统的精度要求确定。精度要求高时应选取较小的基本导程。滚珠的工作圈(或列)数和工作滚珠的数量Ⅳ由试验可知:
第一、第二和第三圈(或列)分别承受轴向载荷的50%、30%和20%左右。因此,工作圈(或列)数一般取2.5(或2)~3.5(或3)。滚珠总数Ⅳ一般不超过150个。
5.轴向间隙的调整与预紧
滚珠丝杠副除了对本身单一方向的传动精度有要求外,对其轴向间隙也有严格要求,以保证其反向传动精度。滚珠丝杠副的轴向间隙是承载时在滚珠与滚道型面接触点的弹性变形所引起的螺母位移量和螺母原有间隙的总和。通常采用双螺母预紧的方法,把弹性变形控制在最小限度内,以减小或消除轴向间隙,并可以提高滚珠丝杠副的刚度。
目前制造的单螺母式滚珠丝杠副的轴向间隙达O.05mm,而双螺母式经
加预紧力调整后基本上能消除轴向间隙。应用该方法消除轴向问隙时应注意以下两点:
1)预紧力大小必须合适,禁忌过小或过大。过小不能保证无隙传动,过大将使驱动力矩增大,效率降低,寿命缩短。预紧力禁忌超过最大轴向负载的l/3。
2)要特别注意减小丝杠安装部分和驱动部分的间隙,这些间隙用预紧的方法是无法消除的,而它对传动精度有直接影响。
常用的双螺母消除轴向间隙的结构形式有三种:
(1)垫片调隙式如图2一lO所示,用螺钉连接滚珠丝杠两个螺母的凸缘,并在凸缘间加垫片。调整垫片的厚度使螺母产生微量的轴向位移,以达到消除轴向间隙和产生预紧力的目的。该形式结构紧凑,工作可靠,调整方便,应用广泛,但不很准确,并且当滚道磨损时不能随意调整,除非更换垫圈。
故适用于一般精度的传动机构。
(2)螺纹调隙式如图2一11所示,
双螺母中的一个外端有凸缘;一个外端无凸缘但制有螺纹,它伸出套筒外,用两个圆螺母固定锁紧,并用键来防止两螺母相对转动。旋转圆螺母可调整消除间隙并产生预紧力,之后再用锁紧螺母锁紧。该种形式结构紧凑,工作可靠,调整方便,缺点是不很精确。
(3)齿差调隙式如图2—12所示,在两个螺母的凸缘上各制有圆柱外齿轮(齿数为z1、z2,且z2一x1=1)分别与内齿圈啮合,内齿圈用螺钉或定位
销固定在套筒上。调整时,先取下两端的内齿圈,使两螺母产生相对角位移,相应地产生轴向的相对位移,从而使两螺母中的滚珠分别紧贴在螺旋滚道的两个相反的侧面上,然后将内齿圈复位固定,故而达到消除间隙,产生预紧力的目的。当两个螺母按同方向转过一个齿时,所产生的相对轴向位移为
式中,P为导程。若:x1=99,z2=100,P=6mm,则△s=0.6μm度很高,工作可靠,但结构复杂,加工和装配工艺性能较差。
6.支承方式与制动(1)支承方式为了保证滚珠丝杠副传动的刚度和精度,应选择合适的支承方式,选用高刚度、小摩擦力矩、高运转精度的轴承,并保证支承座有足够的刚度。滚珠丝杠副的支承按其限制丝杠轴的轴向窜动情况,分为三种形式,如表2—1所示。
(2)制动装置由于滚珠丝杠副的传动效率高,又无自锁能力,故需安装制动装置以满足其传动要求,特别是当其处于垂直传动时。图2—13所示为数控卧式铣镗床主轴箱进给丝杠的制动装置示意图。
当机床工作时,电磁铁线圈4通电吸住压簧3,打开摩擦离合器5。此时步进电动机1接受指令脉冲,将旋转运动通过减速齿轮2传动、滚珠丝杠6旋转,转换为主轴箱7垂直方向的移动。当步进电动机l停止转动时,电磁铁线圈也同时断电,在压簧3作用下摩擦离合器5被压紧,使滚珠丝杠不能自由转动,则主轴箱就不会因自重而下滑了。
7.润滑和密封
(1)润滑润滑剂可提高滚珠丝杠副的耐磨性和传动效率。润滑剂分为润滑油、润滑脂两大类。润滑油为一般机油或90~180号透平油或140号主轴油,可通过螺母上的油孔将其注入螺纹滚道;润滑脂可采用锂基油脂,它加在螺纹滚道和安装螺母的壳体空间内。
(2)密封滚珠丝杠副在使用时常采用一些密封装置进行防护,为防止杂质和水进入丝杠(否则会增加摩擦或造成损坏),对于预计会带进杂质之处按图2—14所示使用波纹管(右侧)或伸缩罩(左侧),以完全盖住丝杠轴。对于螺母,应在其两端进行密封,如图2—15所示,密封防护材料必须具有防腐蚀和耐油性能。
8.精度等级
滚珠丝杠螺母副的精度分成CO、C1、c2、C3、C5、C7、C8等7个等级,最高精度为c0级,最低精度为c8级。系统设计时可参考相应的产品说明书进行标注。[摘自《直线运动系统产品说明书}THK(日本东京)] 9.滚珠丝杠副的设计计算
设计滚珠丝杠副时,已知条件是:工作载荷F(N)或平均工作载荷F。(N),使用寿命Lh(h),丝杠的工作长度(或螺母的有效行程)L(m),丝杠的转速n(平均转速nm或最大转速n…)(r/min),以及滚道硬度HRC和运转情况。设计步骤及方法如下:
1)计算载荷F。(N)的计算Fc=KFKHKAFM (2—2)
式中,KF为载荷系数;KH为硬度系数;KA为精度系数;FM为平均工作载荷。各项参数按表2—2选取。
4)验算传动效率、刚度及工作平稳性是否满足要求,不能满足要求的禁忌使用,应另选其他规格并需重新验算。
滚珠丝杆传动优点
滚珠丝杆传动机构的性能和特点 滚珠丝杠由螺杆、螺母、钢球、预压片、反向器、防尘器组成。是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。当滚珠丝杠作为主动 体时,螺母就会随丝杆的转动角度按照对应规格的导程转化成直线运动,被动工件可以通过螺母座和螺母连接,从而实现对应的直线运动。 常用的循环方式有两种:外循环和内循环。与丝杠脱离接触的称为外循环。外循环是滚珠在循环过程结束后通过螺母外表面的螺旋槽或插管返回丝杠螺母间重新进入循环。外循环滚珠丝杠外循环结构和制造工艺简单,使用广泛。;始终与丝杠保持接触的称为内循环。内循环均采用反向器实现滚珠循环。传动机构的性能 与滑动丝杠副相比驱动力矩为1/3 由于滚珠丝杠副的丝杠轴与丝杠螺母之间有很多滚珠在做滚动运动,所以能得到较高的运动效率。与过去的滑动丝杠副相比驱动力矩达到 1/3以下,即达到同样运动结果所需的动力为使用滚动丝杠副的1/3。在省电方面很有帮助。传动效率高 滚珠丝杠副的传动效率高达90%~98%,为滑动丝杠副的2~4倍,能高效地将扭力转化为推力,或将推力转化为扭力。传动灵敏平稳 滚珠丝杠副为点接触滚动摩擦,摩擦阻力小、灵敏度好、启动时无颤动、低速时无爬行,可μ级控制微量进给。定位精度高 滚珠丝杠副传动过程中温升小、可预紧消除轴向游隙和初级弹性形变、
可对丝杠进行预拉伸以补偿热伸长,故可获得较高的定位精度和重复定位精度。精度保持性好 滚珠及滚道硬度达HRC58~63,滚道形状准确,滚动摩擦磨损极小,具有良好的精度保持性、可靠性和使用寿命。传动刚度高 滚珠丝杠副内外滚道均为偏心转角双圆弧面、在滚道间隙极小的时也能灵活传动。需要时加一定的预紧载荷则可消除轴向游隙和初级弹性形变以获得良好的刚性(此时使用寿命有所减少)。同步性能好 滚珠丝杠副因具有导程精度高、灵敏度好的特点,在需要同步传动的场合,用几套相同导程的滚珠丝杠副可获得良好的同步性能。无侧隙、刚性高 滚珠丝杠副可以加予压,由于予压力可使轴向间隙达到负值,进而得到较高的刚性(滚珠丝杠内通过给滚珠加予压力,在实际用于机械装置等时,由于滚珠的斥力可使丝母部的刚性增强)。高速进给可能 滚珠丝杠由于运动效率高、发热小、所以可实现高速进给(运动)。 滚珠丝杠副可用润滑来提高耐磨性及传动效率。润滑剂分为润滑油及润滑脂两大类。润滑油用机油、90~180号透平油或140号主轴油。润滑脂可采用锂基油脂。润滑脂加在螺纹滚道和安装螺母的壳体空间内,而润滑油通过壳体上的油孔注入螺母空间内。
滚珠丝杠螺母副的支承方式
滚珠丝杠螺母副的支承方式 数控机床的进给系统要获得较高的传动刚度,除了加强滚珠丝杠螺母副本身的刚度外,滚珠丝杠的正确安装及支承结构的刚度也是不可忽视的因素:滚珠丝杠常用推力轴承支座,以提高轴向刚度(当滚珠丝杠的轴向负载很小时,也可用角接触球轴承支座),滚珠丝杠在数控机床上的安装支承方式有以下几种。 (1)一端装推力轴承(固定一自由式)。 如图3-15所示,这种安装方式的承载能力小,轴向刚度低,只适用于短丝杠,一般用于数控机床的调节或升降台式数控铣床的立向(垂直)坐标中。 (2)一端装推力轴承,另一端装深沟球轴承(固定一支承式)。 如图3-16所示,这种方式可用于丝杠较长的情况。应将推力轴承远离液压马达等热源及丝杠上的常用段,以减少丝杠热变形的影响。 (3)两端装推力轴承(单推一单推式或双推一单推式)。 如图3—17所示,把推力轴承装在滚珠丝杠的两端,并施加预紧拉力,这样有助于提高刚度,但这种安装方式对丝杠的热变形较为敏感,轴承的寿命较两端装推力轴承及向心球轴承方式低。 (4)两端装推力轴承及深沟球轴承(固定一固定式)。 如图3-18所示,为使丝杠具有最大的刚度,它的两端可用双重支承,即推力轴承加深沟球轴承,并施加预紧拉力。这种结构方式不能精确地预先测定预紧力,预紧力的大小是由丝杠的温度变形转化而产生的。但设计时要求提高推力轴承的承载能力和支架刚度。 近年来出现一种滚珠丝杠轴承,其结构如图3-19所示。这是一种能够承受很大轴向力的特殊角接触球轴承,与一般角接触球轴承相比,接触角增大到60。,增加了滚珠的数目并相应减小滚珠的直径。这种新结构的轴承比一般轴承的轴向刚度提高两倍以上,使用极为方便。产品成对出售,而且在出厂时已经选配好内
滚珠丝杠副参数计算与选用
滚珠丝杠副参数计算与选用1、计算步骤
2、确定滚珠丝杠导程Ph 根据工作台最高移动速度Vmax , 电机最高转速nmax, 传动比等确定Ph。按下式计算,取较大圆整值。
Ph=(电机与滚珠丝杠副直联时,i=1) 3、滚珠丝杠副载荷及转速计算 这里的载荷及转速,是指滚珠丝杠的当量载荷Fm与当量转速nm。滚珠丝杠副在n1、n2、n3······nn转速下,各转速工作时间占总时间的百分比t1%、t2%、t3%······tn%,所受载荷分别是F1、F2、F3······Fn。 当负荷与转速接近正比变化时,各种转速使用机会均等,可按下列公式计算: (nmax: 最大转速,nmin: 最小转速,Fmax: 最大载荷(切削时),Fmin: 最小载荷(空载时) 4、确定预期额定动载荷 ①按滚珠丝杠副预期工作时间Ln(小时)计算: ②按滚珠丝杠副预期运行距离Ls(千米)计算: ③有预加负荷的滚珠丝杠副还需按最大轴向负荷Fmax计算:Cam=feFmax(N) 式中: Ln-预期工作时间(小时,见表5) Ls-预期运行距离(km),一般取250km。 fa-精度系数。根据初定的精度等级(见表6)选。 fc-可靠性系数。一般情况fc=1。在重要场合,要求一组同样的滚珠丝杠副在同样条件下使用寿命超过希望寿命的90%以上时fc见表7选
fw-负荷系数。根据负荷性质(见表8)选。 fe-预加负荷系数。(见表9) 表-5 各类机械预期工作时间Ln表-6 精度系数fa 机械类型 Ln(小时) 普通机械5000~10000 普通机床10000~20000 数控机床20000 精密机床20000 测示机械15000 航空机械1000 精度等 级 1.2.3 4.5 7 10 fa 1.0 0.9 0.8 0.7 表-7 可靠性系数fc 可靠性% 90 95 96 97 98 99 fc 1 0.62 0.53 0.44 0.33 0.21 表-8 负荷性质系数fw 负荷性 质 无冲击(很平 稳) 轻微冲击伴有冲击或振动fw 1~1.2 1.2~1.5 1.5~2 表-9 预加负荷系数fe 预加负荷类型轻预载中预载重预载fe 6.7 4.5 3.4 以上三种计算结果中,取较大值为滚珠丝杠副的Camm。 5、按精度要求确定允许的滚珠丝杠最小螺纹底d2m a.滚珠丝杠副安装方式为一端固定,一端自由或游动时(见图-5) 式中:E-杨氏弹性模量21×105N/mm2 dm-估算的滚珠丝杠最大允许轴向变形量(mm)
(完整版)机械设计中丝杠螺母副计算校核
1、螺纹副耐磨性计算 《机械设计(第四版)》公式(6.20),螺纹中径计算公式: ] [2P h Fp d φπ≥ 式中, N F 轴向力,- 2.1=-φφ整体式螺母取 1.3,81][表许用压强MPa P - 6m m 螺距, -p mm p h h 365.05.0=?==-螺纹工作高度, 螺母为整体式并且磨损后间隙不能调整,2.1,5.22.1=-=φφ取;该螺旋机构为人力驱动,因此][P 提高20%,MPa P 6.212.118][=?=。 mm P h FP d 3.296 .212.1314.36 49153][2=????=≥ φπ 6 12 6 12 注:当ф<2.5或人力驱动时,[p]值可提高20%;若为剖分螺母时则[p]值应降低15~20%。
图3.? 螺旋副受力图 牙型角α=30°,螺距P 由螺纹标准选择P=6mm 牙顶间隙ac ;25.0,55.1=-=ac p ;5.0,126=-=ac p ;1,4414=-=ac p 外螺纹 大径(公称直径),根据各企业自行制定的行业标准(或自行设计加工)取d=44mm 中径mm p d d 415.02=-= 小径mm h d d 37231=-= 牙高mm ac p h 5.35.03=+= 内螺纹 大径mm ac d D 452=+= 中径mm d D 1422== 小径mm p d D 381=-= 牙高mm h H 5.334== 牙顶宽mm p f 196.2366.0==
牙槽底宽mm ac p w9145 .1 0563 . 366 .0= - = 螺纹升角447 0.0 tan 2 = = d np π ψ 因此选用6 44? T的螺杆,其参数为: 公称直径(mm) d 螺距(mm) P 中径(mm) 2 2 D d= 大径(mm) D 小径(mm) 1 d 1 D 44 6 41 45 37 38 2、螺纹牙强度计算 螺纹牙的剪切和弯曲破坏多发生在螺母。 螺纹牙底宽mm p t8.3 6 634 .0 634 .0 1 = ? = = 螺母旋合长度94.3 1 4 3.2 2 '= ? = =d Hφ 相旋合螺纹圈数16 6 94.3 ≈ = ' = P H z 剪切强度条件 MPa z Dt F 4.06 8.3 61 45 14 .3 34912.5 1 = ? ? ? = π MPa 40 30 ] [- = ≤τ 弯曲强度条件 MPa MPa z Dt Fh b 60 40 ] [ 9.62 61 8.3 45 14 .3 3 34912.5 3 3 2 2 1 - = ≤ = ? ? ? ? ? =σ π
滚珠丝杠螺母副的结构简图
滚珠丝杠螺母副结构图及其工作原理本次观察了实训车间的数控车床、数控铣床、加工中心,作为它们进给伺服 系统机械传动结构中的滚珠丝杠螺母副的结构都是一样的。 滚珠丝杠螺母副的结构原理图 ·组成:主要由丝杆、螺母、滚珠和滚道(回珠器)、螺母座等组成。 ·工作原理:在丝杆和螺母上加工有弧行螺旋槽,当它们套装在一起时便形成螺旋滚道,并在滚道内装满滚珠。而滚珠则沿滚道滚动,并经回珠管作周而复始的循环运动。回珠管两端还起挡珠的作用,以防滚珠沿滚道掉出。 特点: ·传动效率高:机械效率可高达92%~98%。 ·摩擦力小:主要是用滚珠的滚动代替了普通丝杆螺母副的滑动。 ·轴向间隙可消除:也是由于滚珠的作用,提高了系统的刚性。经预紧后可消除间隙。 ·使用寿命长、制造成本高:主要采用优质合金材料,表面经热处理后获得高的硬度。 滚珠丝杠螺母副的滚珠循环方式有两种:滚珠在循环过程中有时与丝杠脱离接触的成为外循环(如图b),始终与丝杠保持接触的成为内循环(如图a)。 (a) 内循环(b)外循环 (1)外循环外循环是常用的一种外循环方式。这种结构是在螺母体上轴向相隔数个半导程处钻两个孔与螺旋槽相切,作为滚珠的进口与出口。再在螺母的外表面上铣出回珠槽并沟通两孔。另外,在螺母内进出口处各装一挡珠器,并在螺母外表面装一套筒,这样构成封闭的循环滚道。外循环结构制造工艺简单,使用较广泛。其缺点是滚道接缝处很难做得平滑,影响滚珠滚动的平稳性,甚至发生卡珠现象,噪声也较大。 (2)内循环内循环均采用反向器实现滚珠循环,数控机床反向器有两种型式。圆柱凸键反向器,反向器的圆柱部分嵌入螺母内,端部开有反向槽。反向槽靠圆柱外圆面及其上端的凸键定位,以保证对准螺纹滚道方问。扁圆镶块反向器,反向器为一半圆头平键形镶块,镶块嵌入螺母的切槽中,其端部开有反向槽。两种反向器比较,后者尺寸较小,从而减小了螺母的栏手向尺寸及缩短了轴向尺寸。
滚珠丝杠设计计算
HJG-S系列滚珠丝杠副的主要性能选择 1 、轴向载荷、寿命 (1)、额定动载荷 Ca 一批相同的滚珠丝杠副 , 在轴向载荷 Fa 的作用力以较高的速度运转 10 ° 转 , 其 90% 的滚珠丝杠副不产生疲劳剥伤 , 此时的轴向载荷 Fa 称为该规格的额定动载荷 (Ca), 此值可在 HJG-S 具体尺寸规格表中查得。 (2)、额定静载荷 Cao Cao 系指滚珠丝杠副在静止(或转速较低)状态下,承受最大接触应力的滚珠和滚道接触面的塑性变形量之和为钢球直径的万分之一时的轴向载荷,此值可在 HJG-S 具体尺寸规格表中查得。 (3)、回转寿命 L 式中: L---- 加转命令: Ca---- 额定动载荷( N ): Fa---- 轴向载荷( N ): Fw---- 载荷系数。 无冲击载荷平滑运动时 Fw=1.0-1.2 普通运动时 Fw=1.2-1.5 冲击振动时 Fw=1.-2.5 (4) 、时间寿命 Lh 式中: Lh---- 时间寿命; L---- 回转寿命; n---- 转速(转 / 分) 2 、按预期工作时间确定预期额定动载荷 Cam 式中: Lh---- 预期工作时间(小时)见表 a ; fa---- 精度系数见表 b ; fc---- 可靠性系数一般 fc=1 ; fw---- 负荷系数见表 c 。 ---- 当量转速(转 / 分) Fm---- 表示当量载荷( N ) 表 a 各类机械预期工作时间 Lh (小时)
机械类型 工作时间 普通机床 5000—10000 普通机床 10000—15000 数控机床 20000 精密机床 20000 测试机床 15000 航空机械 1000 表b 精度系数 1.2.3 4.5 7 10 fa 1.0 0.9 0.8 0.8 表c 负荷系数 无冲击、平稳 轻微冲击 伴有冲击、振动 fw 1—1.2 1.2—1.5 1.5—2 3、滚珠丝杠副的预加负荷 (1)、滚珠丝杠、螺母间的预加负荷FP 为了消除轴向间隙,增加滚珠丝杠副的刚性和定位精度,在丝杠螺母间加以预加负荷FP。过大的FP值将引起滚珠丝杠副寿命下降及摩擦力矩增大,而FP过小,会出现轴向间隙,影响定位精度,因此在一般情况下: 取 Fp=Fm/3 试中:Fp---预加载荷;Fm---当量载荷(N);当轴向载荷不能确定时取Fp=Ca/(8-10) (2)、对预拉但滚珠丝杠副的行程补偿值C和预拉伸力FPL 为补偿因工作温度升高而引起的丝杠伸长,保证滚珠丝杠在正常使用时的定位精度和滚珠丝杠的系统刚度要求较高的高精度滚珠丝杠副,其丝杠轴需进行预加负荷拉伸。一般下列方法实现。 1 )、滚珠丝杠轴在制造时,可提出目标行程的行程补偿值 C C=a. △ t.Lu=11.8 △ tLu. 式中: C ---- 行程补尝值( um );△ t ---- 温度变化值。一般取 2 ℃—3℃;Lu----滚珠丝杠副的有效行程(mm); a----丝杠的线膨胀系数11.8× /度 2)、滚珠丝杠副安装时丝杠的拉伸力Fpl 式中:Fpl----预拉伸力(N);△ t ----滚珠丝杠的温升,一般为2-3;d2----滚珠丝杠螺纹底径(mm); E----杨氏弹性模量:2.1x105N/mm2 4、滚珠丝杠副的极限转速与允许转速 滚珠丝杠副的极限转速主要是指滚珠丝杠副在高速运转时,避免产生共振现象,使滚珠丝杠副正常运转。 式中:----极限转速(转速/分);K----安全系数,一般取0.8;Lb----安装间距;
TBI滚珠丝杠选型计算举例
深圳tbi滚珠丝杠选型计算举例 选取的滚珠丝杠转动系统为: 磨制丝杠(右旋) 轴承到螺母间距离(临界长度) l = 1200mm n = 1200mm 固定端轴承到螺母间距离 L k 设计后丝杠总长 = 1600mm 最大行程 = 1200mm = 14(m/min) 工作台最高移动速度 V man = 24000工作小时。 寿命定为 L h μ= 0.1 (摩擦系数) = 1800 (r/min) 电机最高转速 n max 定位精度: 最大行程内行程误差 = 0.035mm 300mm行程内行程误差 = 0.02mm 失位量 = 0.045mm 支承方式为(固定—支承) W = 1241kg+800kg (工作台重量+工件重量) g=9.8m/sec2(重力加速度) I=1 (电机至丝杠的传动比) Fw=μ×W ×g = 0.1×2041×9.8 ≈ 2000 N(摩擦阻力)
F a --- 轴向载荷(N) F --- 切削阻力(N) F w --- 摩擦阻力(N) 从已知条件得丝杠编号: 此设计丝杠副对刚度及失位都有所要求,所以螺母选形为:FDG(法兰式双螺磨制丝杠) 从定位精度得出精度精度不得小于P5级丝杠 FDG_-_X_R-_-P5-1600X____ 计算选定编号 导程 = 14000/18000≈7.7mm 平均转速 平均载荷
时间寿命与回转寿命 =24000×266×60 =383040000转次 额定动载荷 以普通运动时确定fw 取 1.4 得:额定动载荷 C a ≥39673N 以C a 值从FDG 系列表及(丝杠直径和导程、丝杠长度表) 中查出适合的类型为: 公称直径: d 0=40mm 丝杠底径: d 0=33.9mm 导程:P ho =10mm 循环圈数:4.5 额定动载荷为:48244N 。 丝杠编号: FDG 40 × 10R - P5 - 4.5 - 1600 × ____ 预紧载荷 F ao = F max /3=11000/3 ≈ 3666 N 丝杠螺纹长度 L u =L 1-2L e L 1=L u +2L e =1200+2×40=1280mm 丝杠螺纹长度不得小于1280mm 加上螺母总长一半84mm(从系列表中查出螺母总长168mm)。 得丝杠螺纹长度 ≥ 1364m。
丝杆螺母的选择
滑动螺旋工作时,主要承受转矩及轴向拉力(或者压力)的作用,同时在螺杆和螺母的旋合螺纹间有较大的相对滑动,其失效形式主要是螺纹磨损,因此,滑动螺旋的基本尺寸,通常的根据耐磨性条件确定。下面计算丝杆的耐磨性。 已知:F=41048(N ) 查《机械设计》有: d 2≥] [P h p F φπ??? 对于梯形螺纹有h=0.5P ,《查机械设计》有[]p =22MP 则[] p F d φ8.02≥ 式中:φ在传动精度较高,载荷较大,寿命长时,取4=φ ][P 为材料的许用压力,查《机械设计》[]1可得][P =22Mpa [] p F d φ8.02≥=17.28mm 可以取d 2=50.5mm ,满足d 2的要求。 其公称直径d=55mm 外螺纹mm d 453= 内螺纹mm D mm D 465614== 螺距p=9mm
螺母高度 H=202mm (3)丝杆强度计算 由扭矩 T=F 0tan (V ??+)2 2d 查《机械设计》[]1得,对于M10~M16普通螺纹取tan v ?=0.17 cos ?= D d D 2- 已知D=100mm t=25mm cos ?= D d D 2-=0.5 所以 tan ?=1.732 T=F 0tan (V ??+)22d =41048?25.50732.117.01732.117.0??-+=(Pa) 危险截面 ca σ=212)4(31d T F A +][σ≤=4 s σ 式中:A---是丝杆的最小截面积 A=214d π ca σ=21 2)4(31d T F A +MPa 26≈ 查《机械设计》[]1得,s σ=320~360Mpa 所以ca σ][σ≤ 结论是之前取的丝杆数据符合强度要求 (4)螺母强度计算
滚珠丝杠传动
滚珠丝杠传动 滚珠丝杠是机电一体化的系统中一种新型的螺旋传动机构,在其具有螺旋槽的丝杠与螺母之间装有中间传动原件——滚珠,滚珠丝杠机构虽然结构复杂,制造成本高,不能自锁,但其摩擦阻力矩小、传动效率高(92%-98%),精度高,系统刚度好,运动具有可逆性,使用寿命长,因此在机电一体化系统中得到大量广泛的应用。滚珠丝杠的特点如下: (1)、传动效率高 滚珠丝杠传动系统的传动效率高达90%-98%,为传统的滑动丝杠系统的2~4倍,耗费的能量仅为滑动丝杠的3 1。 (2)、传动精度高 经过淬硬并精磨螺纹滚道后的滚珠丝杠本身具有很高的制造精度,又由于是滚动摩擦,摩擦力小,所以滚珠丝杠传动系统在运动中温升较小,并可预紧消除轴向间隙和对丝杠进行预拉伸以补偿热伸长,因此可以获得较高的定位精度和重复定位精度。 (3)、可微量进给 滚珠丝杠传动系统是高副运动机构,在工作中摩擦力小,灵敏度高,启动平稳,低俗石无爬行现象,因此可以精密地控制微量进给。 (4)、同步性好 由于运动平稳、反应灵敏、无阻碍、无滑移,用几套相同的滚珠丝杠传动系统同时传动系统同时转动几个相同的部件或装,可以获得很好的同步效果。 (5)、高可靠性 与其它传送机械相比,滚珠丝杠传动只需要一般的润滑与防空,有的特殊场合甚至都无需润滑便可工作,系统的故障率也很低,其一般的使用寿命要比滑动丝杠高5~6倍。 1、滚珠丝杠的结构及滚珠循环方式 滚珠丝杠传动机构的工作原理如图1-1-1所示,丝杠4和螺母1的螺纹滚道内置有滚珠2,刚丝杠转动时,带动滚珠沿螺纹滚道滚动,从而产生滚动摩擦。为了防止滚珠从螺纹滚道端面掉出,在螺母的螺旋槽两端设有滚珠回程引
滚珠丝杠副传动系统
滚珠丝杠副传动系统 滚珠丝杠螺母副的特点 滚珠丝杠螺母副是一种低摩擦、高精度、高效率的机构。滚珠丝杠螺母副其它特点如下: 1.运动极灵敏,低速时不会出现爬行; 2.可以完全消除间隙并可预紧,故有较高的轴向刚度,反向定位精度高; 3.滚珠丝杠螺母副摩擦系数小,无自锁,能实现可逆传动; 4.滚珠丝杠螺母副的滚珠循环方式一般分外循环和内循环两种,如图7.3所示。 预紧是指它在过盈的条件下工作,把弹性变形量控制在最小限度。滚珠丝杠多采用双螺母调隙结构。用双螺母加预紧力消除轴向间隙时,必须注意:预紧力不宜过大或过小,要特别减小丝杠安装部分和驱动部分的间隙。 双螺母调隙结构分为螺纹式、垫片式和齿差式等,如图7.4所示。 內絹环方式 图7.3滚珠丝杠螺母副 (分别点击图片进入仿真页 a.螺纹式 b.垫片式
c.齿差式 图7.4双螺母调隙结构 滚珠丝杠的主要技术参数 滚珠丝杠的主要技术参数如图7.5所示。 1)名义直径DO 滚珠丝杠的名义直径DO是滚珠与螺纹滚道在理论接触角状态时,包络滚珠球心的圆柱直径。它是滚珠丝杠螺母副的特征尺寸。名义直径与承载能力有直接关系,DO越大,承载能力和刚度越大。 2)基本导程Ph 导程是丝杠相对于螺母旋转一圈时,螺母上基准点的轴向位移。导程的大小是根据机床的加工精度要求确定的。导程过小势必使滚珠直径变小,滚珠丝杠螺母副的承载能力亦随之减小。 3)滚珠直径dO 一般取d0=0.6Ph 4)滚珠的工作圈数j和工作滚珠总数N 工作圈数j 一般取2.5?3.5圈,而工作滚珠总数N以不大于150个为宜。 5)列数K 要求工作圈数较多的场合,可采用双列或多列式螺母的结构形式
丝杠传动误差实验
丝杠传动机构定位误差测量实验 一、实验目的: 1、了解光栅测量原理。 2、了解丝杠传动机构定位误差的种类和测量方法。 二、实验内容 1. 测量丝杠传动机构的定位误差。 2.计算丝杆螺距误差和螺距累积误差。 三、实验数据及处理: 测量数据和误差处理如下: 理论值去程理论值回程回程误差实际螺距螺距偏差螺距累加误差0.000 0.000 0 0.000 0 4.000 3.795 -4.000 -3.830 -0.035 3.795 -0.205 -0.205 8.000 7.812 -8.000 -7.818 -0.006 4.007 0.007 -0.198 12.000 11.812 -12.000 -11.816 -0.004 4 0 -0.198 16.000 15.806 -16.000 -15.818 -0.012 3.994 -0.006 -0.204 20.000 19.809 -20.000 -19.813 -0.004 4.003 0.003 -0.201 24.000 23.797 -24.000 -23.813 -0.016 3.997 -0.003 -0.204 28.000 27.772 -28.000 -27.814 -0.042 3.995 -0.005 -0.209 32.000 31.772 -32.000 -31.805 -0.013 4 0 -0.209 36.000 35.784 -36.000 -35.792 -0.008 4.012 0.012 -0.197 40.000 39.777 -40.000 -39.775 0.002 3.987 -0.013 -0.210 44.000 43.768 -44.000 -43.781 -0.013 3.991 -0.008 -0.218 48.000 47.768 -48.000 -47.759 0.009 4 0 -0.218 52.000 51.764 -52.000 -51.752 0.012 3.996 -0.004 -0.221 56.000 55.770 -56.000 -55.749 0.021 4.006 0.006 -0.215 60.000 59.767 -60.000 -59.747 0.020 3.997 -0.003 -0.218 64.000 63.756 -64.000 -63.740 0.016 3.989 -0.011 -0.229 68.000 67.743 -68.000 -67.745 -0.002 3.987 -0.013 -0.232 72.000 71.737 -72.000 -71.750 -0.013 3.994 -0.006 -0.238 76.000 75.738 -76.000 -75.743 -0.005 4.001 0.001 -0.237 80.000 79.748 -80.000 -79.743 0.005 4.010 0.010 -0.227 84.000 83.741 -84.000 -83.743 -0.002 4.007 0.007 -0.220 88.000 87.736 -88.000 -87.741 -0.005 3.995 -0.005 -0.225 92.000 91.738 -92.000 -91.743 -0.005 4.002 0.002 -0.223 96.000 95.736 -96.000 -95.742 -0.006 4 0 -0.223 100.000 99.738 -100.000 -99.732 0.006 4.002 0.002 -0.221 104.000 103.747 -104.000 -103.730 0.017 4.009 0.009 -0.212 108.000 107.746 -108.000 -107.727 -0.019 3.999 -0.001 -0.213 112.000 111.756 -112.000 -111.722 0.034 4.010 0.010 -0.203 116.000 115.747 -116.000 -115.722 0.020 3.988 -0.012 -0.215 120.000 119.777 -120.000 -119.712 0.058 4.030 0.030 -0.185
丝杠螺母机构的选择与计算
丝杠螺母机构的选择与计算 5.2.1 确定滚珠丝杠副的导程 滚珠丝杠副的导程按下式计算: (5-1) 式中 h P —滚珠丝杠副的导程,(mm ); Vmax —工作台最高移动速度,(min /m ); max n —电机最高转速,(min /r ); 由进给系统设计要求知: Vmax=2.5min /m 查阅《机械设计手册》[13]得: 步进电机110BF003的最高转速n max =500min /r 。 将数值代入上式(5-1)可得:P h ≥5mm 。 故取P h =S=6mm 。 5.2.2 强度计算 动载强度计算 1)对于燕尾型导轨的牵引力计算 F m =KF X +f(F z +2F Y +G) (5-2) 取 K=1.4 f=0.2 考虑工作台在移动过程中只受G 影响 故 F 1m =fG (5-3) =0.2×30×9.8 =58.8(N ) 考虑工作台在加工时静止只受F X 影响 故 F 2m = KF X (5-4) =1.4×9.8×130 max max n V P h
=1783.6(N ) 故F m = F 1m + F 2m =58.8N +1783.6N =1842.4N 2).计算最大动载荷 C 当转速 min 10r n ≥时,滚珠丝杠螺母的主要破坏形式是工作表面的疲 劳点蚀,因此要进行动载强度计算,其计算动载荷)(N c C 应小于或等于滚珠丝杠螺母副的额定动载荷,即 r eq H d c F F f f T C ≤=3' (5-5) 式中 d f —动载荷系数; H f —硬度影响系数; eq F —当量动载荷,N ; r F —滚珠丝杠螺母副的额定动载荷,N ; 'T —寿命,以r 610为一个单位。 (5-6) 式中 T —使用寿命,h ; N —循环次数; eq n —滚珠丝杠的当量转速,min r 。 取 T=15000h min 667.4166 1000 5.2max r s v n eq =?== (5-7) 代入数据可得: 取2.1=d f 取f H =1.0 当工作载荷单调连续或周期性单调连续变化时,则 N T n T eq 661010 60'-==
丝杆设计计算
数控滑台进给用滚珠丝杠副的设计计算: 横向与纵向滑台的总重量 W 1=3000N 立柱最大重量W 2 =5000N 工作台最 大行程 L K =1000mm 工作台导轨的摩擦系数:动摩擦系数μ=0.1 静摩擦 系数μ 0=0.2 快速进给速度 V max =8m/min 定位精度20 μm/300mm 全行程25μm重复定位精度10μm要求寿命20000小时(两班制工作十年)。 1)确定滚珠丝杠副的导程 因伺服电机与丝杠直联,i=1 由表1查得 V m ax =8m/min n m ax =1440r/min 代入得,
P h ≈5.56mm 由于计算出的P h 值应取较大值圆整,因此 P h =6mm 2)确定当量转速与当量载荷 (1)各种切削方式下,丝杠转速 由表1查得 V 1=0.6 V 2 =0.8 V 3 =1 V 4 =8 代入得 n 1=100 n 2 =133 n3=167 n 4 =1333 (1)各种切削方式下,丝杠轴向载荷 由表1查得 已知W 1=3000N W 2 =5000N
代入得 (3)当量转速 由表1查得 代入得 ≈267r/min n m (2)当量载荷 代入得 F =1380N m 3)预期额定动载荷 (1)按预期工作时间估算
按表9查得:轻微冲击取 f =1.3 w 按表7查得:1~3取 =0.44 按表8查得:可靠性97%取f c =20000小时 已知:L h 代入得 C =27899N m 计算:(2)拟采用预紧滚珠丝杠副,按最大负载F max =4.5 按表10查得:中预载取 F e 代入得 取以上两种结果的最大值 =27899N C m 4)确定允许的最小螺纹底径 (1)估算丝杠允许的最大轴向变形量 ① ≤(1/3~1/4)重复定位精度 ② ≤(1/4~1/5)定位精度 : 最大轴向变形量μm
丝杠螺母
第二节滚珠丝杠传动部件 丝杠螺母机构又称螺旋传动机构,它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。有以传递力为主的(千斤顶),有以传动运动为主的(进给丝杠),还有调整零件之间相对位置的(螺旋测微器)。按照摩擦性质还有滑动(摩擦)丝杠螺母机构和滚动(摩擦)丝杠螺母机构之分。 滑动丝杠螺母机构:结构简单、加工方便、制造成本低、具有自锁功能,但其摩擦阻力矩大、传动效率低(30%-40%)。 滚珠丝杠螺母机构:结构复杂、制造成本高,无自锁功能,但其最大优点是摩擦阻力矩小、传动效率高(92%-98%),因此在机电一体化系统中得到广泛应用。 一、丝杠螺母机构的传动形式 丝杠和螺母间共有4种基本的传动形式 丝杠螺母的基本传动形式 一、丝杠螺母机构的传动形式 (a)螺母固定、丝杠转动并移动。因螺母本身起着支承作用,消除了丝杠轴承可能产生的附加轴向窜动,结构较简单,可获得较高的传动精度。但其刚性较差,因此只适用于行程较小的场合。 (b)丝杠转动、螺母移动。需要限制螺母的转动,故需导向装置。其特点是结构紧凑、丝杠刚性较好,工作行程大,在机电一体化系统中应用较广泛。 一、丝杠螺母机构的传动形式 (c)螺母转动、丝杠移动。需要限制螺母移动和丝杠的转动,由于结构较复杂且占用轴向空间较大,很少应用。 (d)丝杠固定、螺母转动并移动。结构简单、紧凑,但在多数情况下,使用极不方便,很少应用
此外,还有差动传动方式 该方式的丝杠上有旋向相同、基本导程不同的两段螺纹。当丝杠2转动时,可动螺母1的移动距离为S=n×(l01-l02),如果两基本导程的大小相差较少,则可获得较小的位移S。因此,这种传动方式多用于各种微动机构中。 二、滚珠丝杠副的组成及特点 滚珠丝杠副主要包括由丝杆3、螺母2、滚珠4和反向器(滚珠循环反向装置)等四部分。滚珠丝杠副的结构类型可以从螺纹滚道的型面形状、滚珠的循环方式、消除轴向间隙的调整方法进行区别。 滚珠丝杠副实物图
滚珠丝杠副的载荷计算
1滚珠丝杠副的载荷计算 ⑴工作载荷F 工作载荷F是指数控机床工作时,实际作用在滚珠丝杠上的轴向作用力,其数值可用下列进给作 用力的实验公式计算: 对于燕尾形导轨机床 F=kFx+f(Fz+2Fy+W)(1) 对于矩形导轨机床 F=kFx+f(Fz+Fy+W) (2) 对于三角形或组合导轨机床 F=kFx+f(Fz+W)(3) 对于钻镗主轴圆导轨机床 对于滚动导轨机床 F=Fx+f(Fz+W)+Fr(5) 式(1)?(5)中:Fx、Fy、Fz—x、y、z方向上的切削分力,N; Fr —密封阻力,N; V—移动部件的重量,N; M—主轴上的扭矩,N- m dz—主轴直径, mm 表 1 f'—导轨摩擦系数;f —轴套和轴架以及主轴的键的摩擦系数;k—考虑颠覆力矩影响的实验系数。正常情况下,k、f与f可取表1数值。 (2)最小载荷Fmin 最小载荷F?min为数控机床空载时作用于滚珠丝杠的轴向载荷。此时, Fx=Fy=Fz=Q (3)最大工作载荷F?max 最大载荷F?max为机床承受最大切削力时作用于滚珠丝杠的轴向载荷。
(4)平均工作载荷Fm与平均转速nm 当机床工作载荷随时间变化且此间转速不同时, 式中:1,t2,…,tn分别为滚珠丝杠在转速n1,n2,…,nn下,所受轴向载荷分别是F1,F2,…, Fn 时的工作时间(min) 当工作载荷与转速接近正比变化且各种转速使用机会均等时,可用下式求得Fm和nm Fm=(2Fmax+Fmin y 3(8) nm=(nm ax+nmin)/2(9) 2滚珠丝杠副主要技术参数的确定 (1)导程Ph 根据机床传动要求,负载大小和传动效率等因素综合考虑确定。一般选择时,先按机床传 动要求确定,其公式为:Ph> vmax/nm ax(10) 式中:vmax—机床工作台最快进给速度, mm/mir; nmax-驱动电机最高转速,r/min。在满足控制系统分辨率要求的前提下,Ph应取较大的数值。 (2)螺母选择 由于数控机床对滚珠丝杠副的刚度有较高要求,故选择螺母时要注重其刚度的保证。推荐按高刚度要求选择预载的螺母型式。其中插管式外循环的端法兰双螺母应用最为广泛。它适用重载荷传动、高速驱动及精密定位系统。并在大导程、小导程和多头螺纹中具有独特优点,且较为经济。 ①滚珠的工作圈数i和列数j。根据所要求性能、工作寿命,推荐按表 2选取。 表2 ②法兰形状。按安装空间由标准形状选择,亦可根据需要制成特殊法兰形状。 (3)导程精度选择 根据机床定位精度,确定滚珠丝杠副导程的精度等级。一般情况下,推荐按下式估算: 式中:E――累计代表导程偏差,卩m;
丝杠螺母传动机构学习资料
丝杠螺母传动机构
丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。有以传递能量为主的(如螺旋压力机、千斤顶等);也有以传递运动为主的如机床工作台的进给丝杠);还有调整零件之问相对位置的螺旋传动机构等。 丝杠螺母机构有滑动摩擦机构和滚动摩擦机构之分。滑动丝杠螺母机构结构简单,加工方便,制造成本低,具有自锁功能,但其摩擦阻力矩大、传动效率低(30%~40%)。滚珠丝杠螺母机构虽然结构复杂、制造成本高,不能自锁,但其最大优点是摩擦阻力矩小、传动效率高(92%~98%),精度高,系统刚度好,运动具有可逆性,使用寿命长,因此在机电一体化系统中得到大量广泛应用。本节主要介绍滚珠丝杠螺母机构。 1.工作原理如图2—1所示,丝杠4和螺母1的螺纹滚道间置有滚珠2,当丝杠或螺母转动时,滚珠2沿螺纹滚道滚动,则丝杠与螺母之间相对运动时产生滚动摩擦,为防止滚珠从滚道中滚出,在螺母的螺旋槽两端设有回程引导装置3,如图2一la所示的反向器和图2—1b所示的挡珠器,它们与螺纹滚道形成循环回路,使滚珠在螺母滚道内循环。 2.传动形式根据丝杠和螺母相对运动的组合情况,其基本传动形式有如图2—2所示的四种类型。
(1)螺母固定、丝杠转动并移动如图2—2a所示,该传动形式因螺母本身起着支承作用,消除了丝杠轴承可能产生的附加轴向窜动,结构较简单,可获得较高的传动精度。但其轴向尺寸不宜太长,否则刚性较差。因此只适用于行程较小的场合。 (2)丝杠转动、螺母移动如图2-2b所示,该传动形式需要限制螺母的转动,故需导向装置。其特点是结构紧凑,丝杠刚性较好。适用于工作行程较大的场合。 (3)螺母转动、丝杠移动如图2_2c所示,该传动形式需要限制螺母移动和丝杠的转动,由于结构较复杂且占用轴向空间较大,故应用较少。 (4)丝杠固定、螺母转动并移动如图2—2d所示,该传动方式结构简单、紧凑,但在多数情况下使用极不方便,故很少应用。 此外,还有差动传动方式,其传动原理如图2_3所示。该方式的丝杠上有基本导程(或螺距)不同的(如L01、L02)两段螺纹,其旋向相同。当丝杠2转动时,可动螺母1的移动距离s=n(L01-L02)(n为丝杠转速),如果两基本导程的大小相差较少,则可获得较小的位移s。因此,这种传动方式多用于各种微动机构中。
滚珠丝杠螺母副的设计要点
目录 一成绩评定表………………………………………………………………………二课程设计任务书………………………………………………………………三前言……………………………………………………………………………………四滚珠丝杠螺母副的设计……………………………………………………五轴承选择……………………………………………………………………………六电机选择……………………………………………………………………………七设计总结……………………………………………………………………………八参考文献……………………………………………………………………………
成绩评定表 学生姓名李洋班级学号1001012116 专业机械设计制 造及其自动 化课程设计题目数控车床伺服进给系统 结构与控制设计(8) 评 语 组长签字: 成绩 日期201 年月日
课程设计任务书 学院机械学院专业机械设计制造及其自动化学生姓名李洋班级学号1001012116 课程设计题目数控车床伺服进给系统结构与控制设计(8) 实践教学要求与任务: 1、设计内容 (1)运动设计:确定最佳传动比,计算选择滚珠丝杠螺母副、伺服电动机、导轨及丝杠的支承; (2)结构设计:完成进给系统装配图设计(0#图1张); (3)验算:完成系统刚度计算,验算定位误差等; (4)设计单片机控制交流电机变频调速的原理图(多速开关); (5)按照加速-匀速1-减速-匀速2-减速停的速度曲线,设计单片机控制程序; (6)撰写设计计算说明书。 2、主要技术参数: X轴:进给行程 400 mm;进给速度 1-6000mm/min,快移速度 10m/min,;最大进给力:5500 N;定位精度:0.012mm/300mm, 定位精度:0.006mm,横向滑板上刀架重量: 80 Kg。 工作计划与进度安排:(共2周) (1)集中讲授设计内容、步骤及要求,下发设计题目及任务书,理解题目要求,查阅资料,确定结构设计方案(第16周的周一~周二) (2)指导学生进行设计计算及确定设计方案、装配图结构设计(第16周的周三~周五) (3)结构部分说明书撰写及答辩验收(第16周的周六~第17周的周一上午)(4)控制方案确定及原理图设计、控制程序设计(第17周的周一下午~周四)(5)控制部分说明书撰写及答辩验收(第17周的周四~周五) 指导教师: 201 年月日专业负责人: 201 年月日 学院教学副院长: 201 年月日
滚珠丝杠螺母副的计算和选型
Δ3 一、进给传动部件的计算和选型 进给传动部件的计算和选型主要包括:确定脉冲当量、计算切削力、选择滚珠丝杠螺母副、计算减速器、选择步进电机等。 1、脉冲当量的确定 根据设计任务的要求,X方向的脉冲当量为δx=0.005mm/脉冲,Z 方向为δz=0.01mm/脉冲。 2、切削力的计算 切削力的分析和计算过程如下: 设工件材料为碳素结构钢,σb=650Mpa;选用刀具材料为硬质合金YT15;刀具几何参数为:主偏角κr=60°,前角γo=10°,刃倾角λs=-5°;切削用量为:背吃刀量a p=3mm,进给量f=0.6mm/r,切削速度vc=105m/min。 查表得:C Fc=2795,x Fc=1.0,y Fc=0.75,n Fc=-0.15。 =0.94;刃倾角、前角和刀尖圆查表得:主偏角κr的修正系数k κrFc 弧半径的修正系数均为1.0。 由经验公式(3—2),算得主切削力F c=2673.4N。由经验公式F c:F f: F p=1:0.35:0.4,算得进给切削力F f=935.69N,背向力F p=1069.36N。 3、滚珠丝杠螺母副的计算和选型 (1)工作载荷F m的计算 已知移动部件总重G=1300N;车削力F c=2673.4N,F p=1069.36N,F f=935.69N。根据F z=F c,F y=F p,F x=F f的对应关系,可得:F z=2673.4N,F y=1069.36N,F x=935.69N。 选用矩形—三角形组合滑动导轨,查表,取K=1.15,μ=0.16,代入F m=KF x+μ(F z+G),得工作载荷F m=1712N。 (2)最大动载荷F Q的计算 设本车床Z向在最大切削力条件下最快的进给速度v=0.8m/min,初选丝杠基本导程P h=6mm,则此时丝杠转速n=1000v/P h=133r/min。取滚珠丝杠的使用寿命T=15000h,代入L0=60nT/106,得丝杠系数
丝杠螺母传动机构
丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。有以传递能量为主的(如螺旋压力机、千斤顶等);也有以传递运动为主的如机床工作台的进给丝杠);还有调整零件之问相对位置的螺旋传动机构等。 丝杠螺母机构有滑动摩擦机构和滚动摩擦机构之分。滑动丝杠螺母机构结构简单,加工方便,制造成本低,具有自锁功能,但其摩擦阻力矩大、传动效率低(30%~40%)。滚珠丝杠螺母机构虽然结构复杂、制造成本高,不能自锁,但其最大优点是摩擦阻力矩小、传动效率高(92%~98%),精度高,系统刚度好,运动具有可逆性,使用寿命长,因此在机电一体化系统中得到大量广泛应用。本节主要介绍滚珠丝杠螺母机构。 1.工作原理如图2—1所示,丝杠4和螺母1的螺纹滚道间置有滚珠2,当丝杠或螺母转动时,滚珠2沿螺纹滚道滚动,则丝杠与螺母之间相对运动时产生滚动摩擦,为防止滚珠从滚道中滚出,在螺母的螺旋槽两端设有回程引导装置3,如图2一la所示的反向器和图2—1b所示的挡珠器,它们与螺纹滚道形成循环回路,使滚珠在螺母滚道内循环。 2.传动形式根据丝杠和螺母相对运动的组合情况,其基本传动形式有如图2—2所示的四种类型。 (1)螺母固定、丝杠转动并移动如图2—2a所示,该传动形式因螺母本身起着支承作用,消除了丝杠轴承可能产生的附加轴向窜动,结构较简单,可获得较高的传动精度。但其轴向尺寸不宜太长,否则刚性较差。因此只适用于行程较小的场合。 (2)丝杠转动、螺母移动如图2-2b所示,该传动形式需要限制螺母的转动,故需导向装置。其特点是结构紧凑,丝杠刚性较好。适用于工作行程较大的场合。
(3)螺母转动、丝杠移动如图2_2c所示,该传动形式需要限制螺母移动和丝杠的转动,由于结构较复杂且占用轴向空间较大,故应用较少。 (4)丝杠固定、螺母转动并移动如图2—2d所示,该传动方式结构简单、紧凑,但在多数情况下使用极不方便,故很少应用。 此外,还有差动传动方式,其传动原理如图2_3所示。该方式的丝杠上有基本导程(或螺距)不同的(如L01、L02)两段螺纹,其旋向相同。当丝杠2转动时,可动螺母1的移动距离s=n(L01-L02)(n为丝杠转速),如果两基本导程的大小相差较少,则可获得较小的位移s。因此,这种传动方式多用于各种微动机构中。 3.结构类型 (1)螺纹滚道截面形状我国生产的滚珠丝杠副的螺纹滚道有单圆弧型和双圆弧型,如图2—4所示。滚道型面与滚珠接触点的法线同丝杠轴向的垂线间的夹角α称为接触角,般为45°。单圆弧型的螺纹滚道的接触角随轴向载荷大小的变化而变化,这主要由轴向载荷所引起的接触变形的大小而定。α大时,传动