脑机接口在机器人控制中的应用研究现状
脑机接口在机器人控制中的应用研究现状
作者:王斐, 杨广达, 张丹, 赵姝颖, Wang Fei, Yang Guangda, Zhang Dan, Zhao Shuying 作者单位:东北大学信息科学与工程学院,辽宁沈阳,110004
刊名:
机器人技术与应用
英文刊名:Robot Technique and Application
年,卷(期):2012(6)
本文链接:https://www.360docs.net/doc/7110661936.html,/Periodical_jqrjsyyy201206004.aspx
脑机接口技术综述
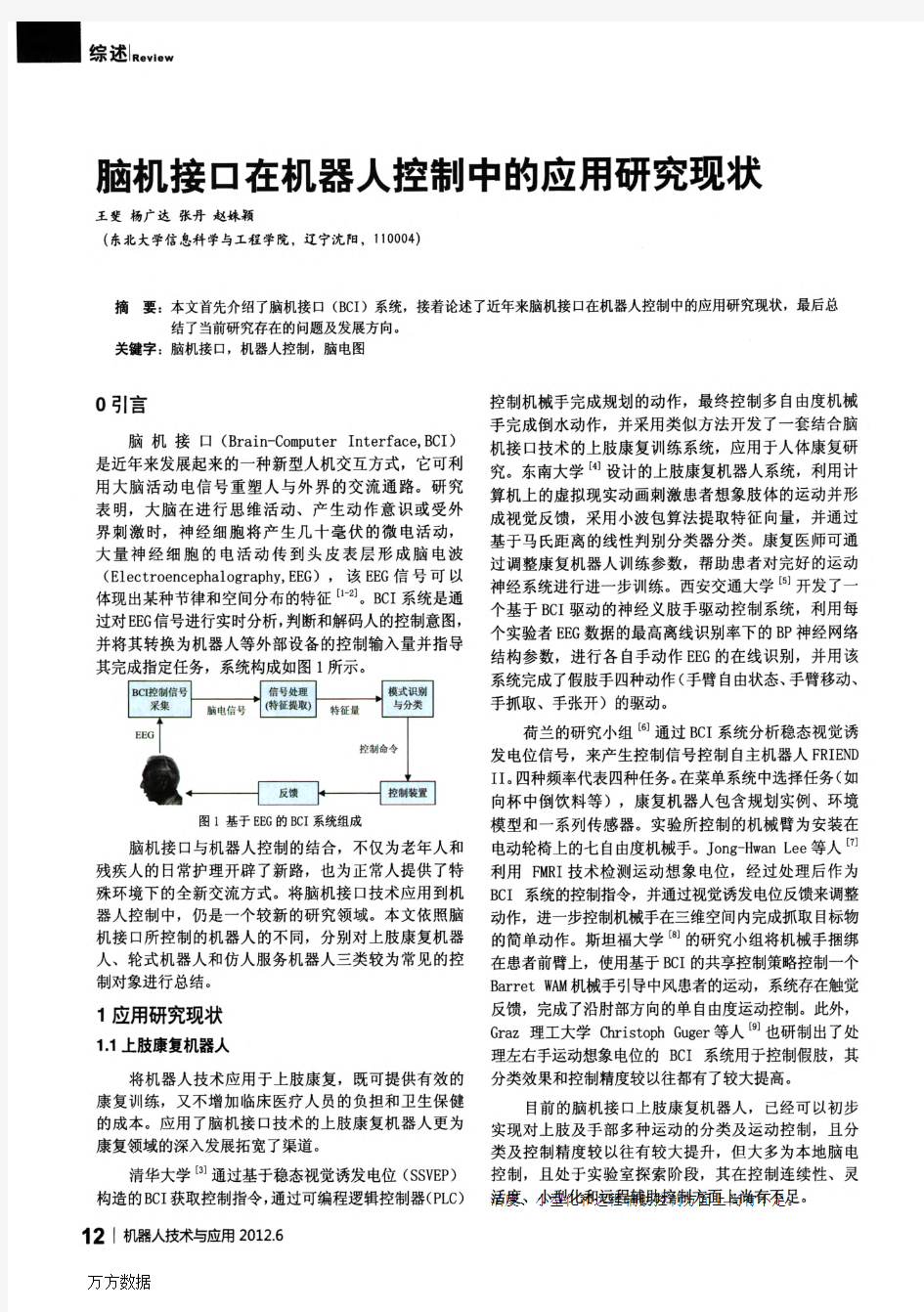
脑机接口技术的研究综述 摘要 脑机接口( Brain- Computer Interface, BCI)是在大脑和计算机或其他电子设备之间建立的不依赖于常规大脑信息输出通路(外周神经和肌肉组织)的一种全新通讯和控制技术。脑机接口作为当前神经工程领域中最活跃的研究方向之一,在生物医学、神经康复和智能机器人等领域具有重要的研究意义和巨大的应用潜力,近10年来,脑机接口技术得到了长足的进步和飞速的发展,应用领域也在逐渐扩大。本文概述了基于脑电信号( EEG )的BCI系统的组成和基本原理、涉及的关键技术和研究现状, 最后分析了脑-机接口技术目前存在的问题与应用前景。 关键词:脑机接口;脑电信号;特征提取;特征分类 一、引言 脑机接口是一种不依赖大脑外周神经与肌肉正常输出通道的控制系统,通过采集和分析人脑生物电信号,在人脑与计算机或其他电子设备间建立起直接交流和控制的通道,这样人就可以直接通过大脑来表达意愿或操纵设备,而不需要语言或肢体的动作[1-2]。研究和发展脑机接口技术可以帮助肌肉萎缩、脊髓损伤等神经肌肉方面的患者以及交流障碍者有效地完成对外界交流和控制[3]。 脑机接口技术形成于20世纪70年代,是一门涉及纳米技术、生物技术、信息技术、心理认知科学、计算机科学、生物医学工程和应用数学等多学科的交叉技术,20多年来,随着人们对神经系统功能认识的提高和计算机技术的发展,BCI 技术的研究呈明显的上升趋势,特别是1999年和2002年两次BCI国际会议的召开为BCI技术的发展指明了方向。目前,BCI技术已引起国际上众多学科科技工作者的普遍关注,成为生物医学工程、计算机技术、通信等领域一个新的研究热点。BCI技术的核心是把用户输入的脑电信号转换成输出控制信号或命令的转换算法。BCI研究工作中相当重要的部分就是调整人脑和BCI系统之间的相互适应关系,也就是寻找合适的信号处理与转换算法,使得神经电信号能够实时、快速、准确地通过BCI系统转换成可以被计算机识别的命令或操作信号。BCI技术的发展目前还存在着很多问题,有待于更多的科技工作者致力于深入的研究。为促进BCI 技术的发展,本文在查阅有关资料的基础上,对BCI的原理、结构做了较为详细的综述,并对其应用前景、存在的问题以及评价标准进行了探讨
基于工控机的数控系统的实时控制设计
基于工控机的数控系统的实时控制设计 发表时间:2009-1-26 许燕萍杨代华来源:万方数据 关键字:工控机数控系统实时控制 信息化应用调查在线投稿加入收藏发表评论好文推荐打印文本 分析了Windows的定时器原理,设计了一种在Windows平台下执行的实时控制程序,实现了系统微秒级的定时,可满足数控系统运动时对实时性的要求。 0 概述 计算机数控机床(CNC)是20世纪70年代发展起来的机床控制新技术,它综合了计算机、自动控制、测量技术、机械制造等领域的最新成就,使机器工具的生产效率和加工精度得到了极大提高。数控技术的先进与否直接代表了一个国家的机械工业水平,数控产业对于国家的工业现代化,乃至于国家经济安全和国防安全都具有超越其巨大经济价值的战略意义。 数控系统是先进制造装备实现控制功能的核心部件。国内对数控系统的研究由于起步较晚,在技术上还落后于国外一到两代。目前数控产业的高端市场主要由西门子、发那克、GE等大公司主导,我国每年会进口上万台高档数控机床。因此,加强数控技术的研发,发展自主知识产权的数控系统势在必行。 实时控制是数控系统开发的关键技术之一,数控机床的精度一般可达到微米级,本设计主要用作教学实践用,对精度的要求不用太高,设计时可定为0.01 mm,此级精度对于普通的零件加工也是可以满足的。数控机床的速度一般为(2~20)m/min,若要达到0.01姗的定位,系统的响应需达到(0.03~0.3)脚,即需要微秒级的响应。不光是定位,在基于PC机的数控软件中,为了保证对控制对象的实时性处理,包括数据采集、速度处理、插补及位置伺服控制、事件处理等,每一项任务都要在规定的时间内完成。因此,对于底层控制程序的设计是非常重要的。 1 Windows的定时器原理 Windows是一个消息驱动式的操作系统,Windows消息提供了应用程序与应用程序之间、应用程序与Windows系统之间进行通讯的手段。应用程序要实现的功能由消息来触发,并靠对消息的响应和处理来完成。但由于消息传递是非抢先性的,不论事件消息的急与缓,总是按到达的先后顺序排队,这就使得一些外部实时事件可能得不到及时的处理,容易造成实时系统性能不稳定。对实时控制系统而言,在精确的时间段内及时响应消息是实时系统的根本,如果不能保证系统的实时性,实时控制系统也就失去了实际意义。在计算机数控系统开发中,数据插补是一件实时性很强的工作,它要求在给定的时间段内,必须进行插补工作。插补的品质直接决定了系统的加工速度和加工精度。在Windows环境下如何实现实时中断和控制是计算机数控系统开发中的难点之一。 2 实时控制解决方案 在各种实时控制系统中,实时时钟的控制都是关键技术。因为各种控制过程、控制任务都由实时时钟来推进。在Windows环境下,常用的实时时钟获取方法有下面几种: a)设置Win32定时器并响应WM_TIMER消息来进行实时处理:这种方法是最简单的一类方法,在Windows环境下,各种可视化开发工具如VC,Delphi,C++ Builder等,都提供定时器控件Timer。通过设定控件的属性,并响应WM_TMER消息,可以实现一定的定时功能。但是由于Windows提供的定时器是建立在D0sICH中断的基础上,该中断每秒钟发生18.2次,即定时周期为54.945ms,该定时精度远不能满足数控系统对实时性的要求。另外,函数SetTimer ()中指定的计时周期虽以ms为单位,但这个值要转化为54.945ms的整数倍;定时器发送的WM_TIMER消息的优先级相当低,在应用程序的消息队列里要等高优先级的消息处理完后才能被处理。而且Windows在应用程序的消息队
脑机接口技术综述
脑机接口技术综述 标准化文件发布号:(9312-EUATWW-MWUB-WUNN-INNUL-DQQTY-
脑机接口技术的研究综述 摘要 脑机接口( Brain- Computer Interface, BCI)是在大脑和计算机或其他电子设备之间建立的不依赖于常规大脑信息输出通路(外周神经和肌肉组织)的一种全新通讯和控制技术。脑机接口作为当前神经工程领域中最活跃的研究方向之一,在生物医学、神经康复和智能机器人等领域具有重要的研究意义和巨大的应用潜力,近10年来,脑机接口技术得到了长足的进步和飞速的发展,应用领域也在逐渐扩大。本文概述了基于脑电信号( EEG )的BCI系统的组成和基本原理、涉及的关键技术和研究现状, 最后分析了脑-机接口技术目前存在的问题与应用前景。 关键词:脑机接口;脑电信号;特征提取;特征分类 一、引言 脑机接口是一种不依赖大脑外周神经与肌肉正常输出通道的控制系统,通过采集和分析人脑生物电信号,在人脑与计算机或其他电子设备间建立起直接交流和控制的通道,这样人就可以直接通过大脑来表达意愿或操纵设备,而不需要语言或肢体的动作[1-2]。研究和发展脑机接口技术可以帮助肌肉萎缩、脊髓损伤等神经肌肉方面的患者以及交流障碍者有效地完成对外界交流和控制[3]。 脑机接口技术形成于20世纪70年代,是一门涉及纳米技术、生物技术、信息技术、心理认知科学、计算机科学、生物医学工程和应用数学等多学科的交叉技术,20多年来,随着人们对神经系统功能认识的提高和计算机技术的发展,BCI技术的研究呈明显的上升趋势,特别是1999年和2002年两次BCI国际会议的召开为BCI技术的发展指明了方向。目前,BCI技术已引起国际上众多学科科技工作者的普遍关注,成为生物医学工程、计算机技术、通信等领域一个新的研究热点。BCI技术的核心是把用户输入的脑电信号转换成输出控制信号或命令的转换算法。BCI研究工作中相当重要的部分就是调整人脑和BCI系统之间的相互适应关系,也就是寻找合适的信号处理与转换算法,使得神经电信号能够实时、快速、准确地通过BCI系统转换成可以被计算机识别的命令或操作信号。BCI技术的发展目前还存在着很多问题,有待于更多的科技工作者致力于深入的研究。为促进BCI技术的发展,本文在查阅有关资料的基础上,对BCI的原理、结构做了较为详细的综述,并对其应用前景、存在的问题以及评价标准进行了探讨。
水泵自动化控制系统使用说明书
水泵自动化控制系统使用说明书 一、························概述 乌兰木伦水泵自动化控制系统是由常州自动化研究所针对乌兰木伦矿井下排水系统的实际情况设计的自动控制系统。通过该系统可实现对水泵的开停、主排水管路的流量、水泵排水管的压力、水仓的水位等信号的实时监测,并能通过该系统实现三台主水泵的自动、手动控制并和KJ95监控系统的联网运行,实现地面监控。 基本参数: 水泵: 200D43*3 3台(无真空泵) 扬程120米流量288米3/小时 主排水管路直径 200mm 补水管路直径 100mm 水仓: 3个 水仓深度分别为: 总容量: 1800米 3 主电机: 3*160KW 电压:AC660V 启动柜控制电压: AC220V 220变压器容量: 1500VA 二、系统组成 本控制系统主要由水泵综合控制柜,电动阀门及传感器三大部分组成。参见“水泵控制柜内部元件布置图:。 1、水泵综合控制柜是本系统的控制中心,由研华一体化工控机、数据采集板、KJ95分站通讯接口、中间继电器、控制按钮及净化电源及直流稳压电源组成。 其中,净化电源主要是提供一个稳定的交流220V电压给研华一体化工控机,以保证研华一体化工控机的正常工作,直流稳压电源主要提供给外部传感器、中间继电器及数据采集板的工作电源。 控制按钮包括方式转换按钮、水泵选择按钮及手动自动控制按钮,分别完成工作方式的转换、水泵的选择及水泵的手动和自动控制。本控制柜共有40个按钮,从按钮本身的工作形式来说这些按钮有两种,一种为瞬间式,即按钮按下后再松开,按钮立刻弹起,按钮所控制的接点也不保持;另外一种为交替式,即按钮按下后再松开按钮,按钮并不立刻弹起,而是再按一次后才弹起,按钮所控制的接点保持(如方式转换按钮、水泵选择按钮等)。 中间继电器采用欧姆龙公司MY4型继电器,主要完成信号的转换和隔离。另外,还对
脑机接口技术研究概述
网络与通信信息技术与信息化 26 2008年第6期 脑机接口技术研究概述 A R ev ie w of B ra i n-Co mputer Interface T echnology 朱文明* 高 诺** Z H U W en-m in g GAO N uo 摘 要 脑机接口(B rai n-Co m puter Interf ace,BC I)是在人脑和外界之间建立不依赖于常规大脑信息输出通路(外周神经和肌肉组织)的一种通讯系统。本文概述了基于脑电信号(EEG)的BC I技术的基本原理、研 究方法、类型、研究现状,并分析了目前存在的问题与应用前景。 关键词 脑机接口 脑电信号 人机接口 Abstract Bra i n-Co m puter Inte rface(BC I)is a comm un i cati on syste m in wh i ch messages or comm ands that an i nd i v i dua l sends to the ex terna lwo rl d do no t pass through the brai n s no r m al outpu t path w ays(periphera l nerves and m usc l es).Th is pape r su mm ar ized the basi c pri nc i ple,researchm e t hods,class ifi cati on and status,the proble m s in current stud i es and the d irec tion for future i nvesti gation are ana lyzed. K ey word s B ra i n-co m pute r i n terface E l ec troencepha l og raph signa l s H u m an-compu ter i nterface 对严重神经或肌肉伤残患者来说 直接用大脑控制装置是不可能的 ,但是近年来随着脑科学、计算机科学、信号处理技术的飞速发展以及残疾患者的需求意识的不断提高,一项被称作脑机接口(B ra i n-Computer Interface,BC I)的技术正在逐步使得人类利用脑信号同计算机或其他装置进行通讯成为可能。脑机接口技术是人脑与计算机或其他电子设备之间建立的直接的交流和控制通道。通过这种通道,人就可以直接通过脑来表达想法或操作其他设备,而不需要通过语言或肢体的动作,是一种全新的通讯和控制方式[1-3]。这对肢体残缺的人来说有着极其重要的 *山东建筑大学现代教育技术中心 济南 250014 **山东建筑大学信息与电气工程学院 济南 250101意义。因此对于脑机接口的研究是近年来康复医学研究的一个热点。脑机接口技术是一门涉及神经学、心理认知科学、康复工程、生物医学工程和计算机科学等多学科的交叉技术。 要想实现脑机接口,有三个必要条件:第一,必须有一种能够可靠反应大脑思维的信号;第二,这种信号能够被实时且快速地收集;第三,这种信号有明确的分类[5,6]。目前可用于脑机接口的人脑信号有:EEG(脑电图)、E M G(脑磁图)和M f R I(功能性核磁共振图像)等。目前大多数BCI研究机构采用的大脑信号是EEG。 1 脑机接口系统的基本结构 BC I系统一般都具有信号采集、信号分析和控制器三个功能 工具去实现,常用的证书管理工具有O pen SSL、EJBCA、O pen C A 或其他商业版本的证书管理系统等。高等学校作为一个独立的实体,可以建立校园范围内的C A中心,管理高等学校内部应用中所需要的证书。参考HEPK I技术活动小组提出的 轻型校园PK I 基础设施框架 (简称PK I-L ite),建立一个既满足高校要求又便于实现的精简的PK I是十分必要的。 10 结论 中间件及核心中间件是在不断演进发展的,要建立高等学校统一的数据中心,核心中间件服务是一件极具挑战性的任务,一般认为在高等学校中部署中间件服务难度大于在企业中部署,需要同时从技术上和策略上着手,也更需要决策者和实施者有远见与耐心。在建立数据中心中间件服务之前,建立一套完整的核心中间件规范是非常重要的,在有明确的规范的指导下,完成建立核心中间件服务的工作会变得比较容易。 参考文献:[1] D ave C rane Er i c P ascare llo D arren Ja m es. A j ax i n A ction [M]北京:人民邮电出版社,2006年4月. [2] STRU TS W EB设计与开发大全[M].北京:清华大学出版 社,邱哲王俊标,2006年 [3] W iseNut Search Eng i ne wh ite paper.A utho r:W isenut Inc. 2001. [4] A lta V ista w hite paper.A uthor:A ltav ista Inc.1999. [5] The A na to m y o f a La rge-Sca l e H ypertex t ua lW eb Search En- g i ne.A utho r:Se rgey B ri n and L a w rence Page,1998. [6] 软件的涅磐.世界图书出版社出版,2004年. [7] 信息系统分析与设计.西安电子科技大学出版社,卫红春, 2004年. [8] 软件工程技术概述.科学出版社,朱三元等,2002年. [作者简介] 王会林(1967~),男,汉族,江西崇义人,硕士学位,韩山师范学院数学信息学院高级工程师。 (收稿日期:2008-03-11)
基于姿态与脑电波控制智能车
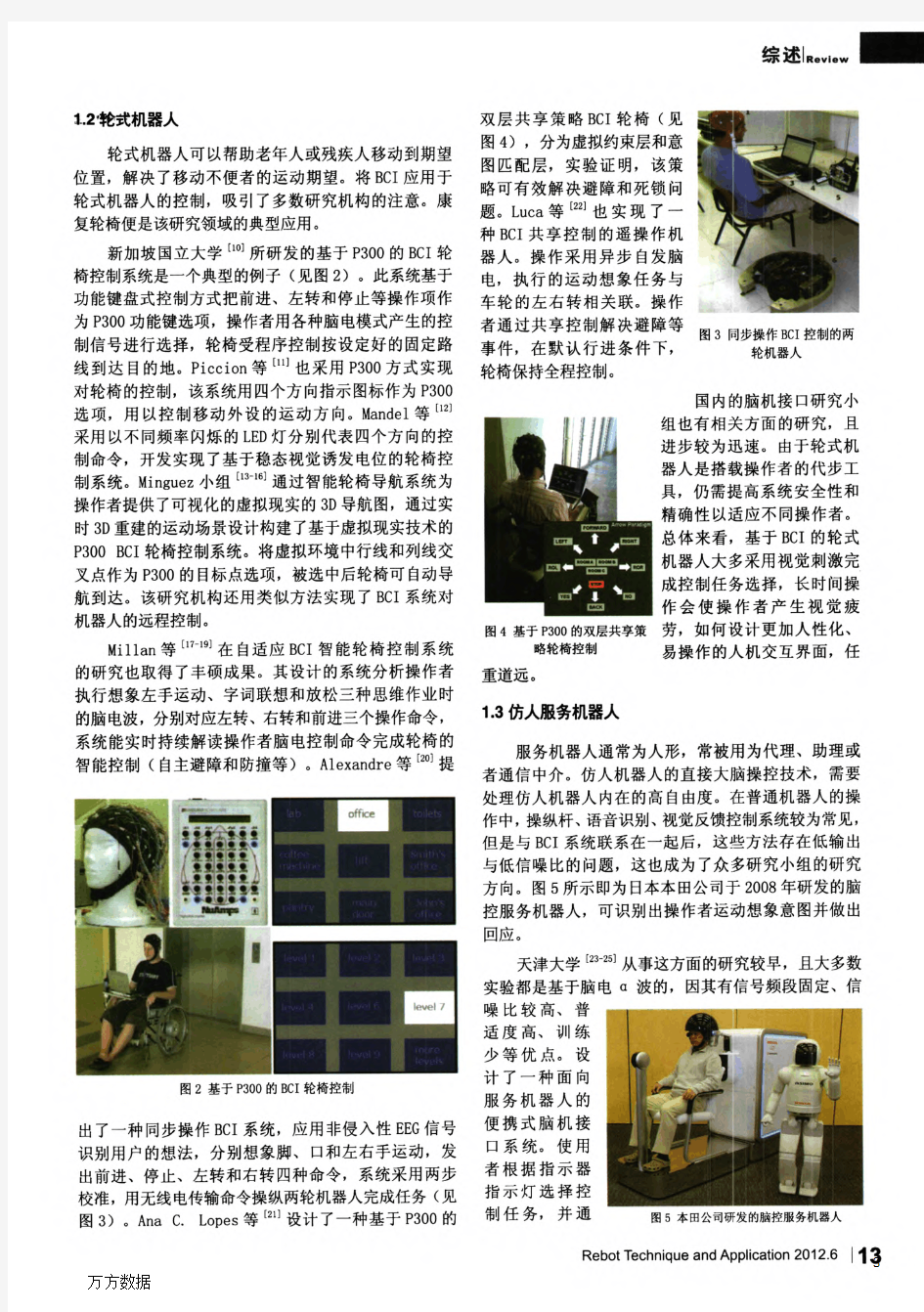
基于姿态与脑电波控制智能车 进程贴地址:https://www.360docs.net/doc/7110661936.html,/forum.ph ... peid%26typeid%3D626 过程的实拍:https://www.360docs.net/doc/7110661936.html,/s/1qWrXTMk 一、项目设计背景与概述 在这里不过多累赘的说明设计此项目的背景,市面上各种各样的智能小车比较多,功能也很丰富。我个人觉得不管学习什么知识和技术,动手能力是其一,其次是理论知识。在这里以智能小车作为项目的设计对象,不是为了要做出一个功能如何丰富、复杂的一个小车,而是通过这个小车平台,来把自己所学的、正在学的、想学的都装载这个小车上,并不是说要做出怎样的一款产品设计,而是通过这个设计来不断学习和应用。在此有幸能参加深圳联华集成电路有限公司推广的单片机设计大赛,也感谢官方提供的单片机样片,因此,此次的小车项目就以此为核心平台展开设计。 如标题所述,本小车平台一个突出同时也比较吸引人的是引入了脑电波,当然,这是其中的一个控制手段。此次的小车项目设计很重要的一个概念就是模块化设计,从硬件到软件,可扩展可裁剪,这样设计的目的如前面所说的,便于一步一步的学习并把学习到的东西在小车上应用实践。 二、平台框图 平台介绍小车平台带有控制器,能够协调各个模块的工作,并完成与上位机通信,小车带有nRF2401和蓝牙通信模块,通信模块可以通过不断的学习进行扩展,小车上带有各种各样的传感器,如三轴、温湿度、测距、测速、GPS等不断进行功能扩展,当然,还有最基本的小车车体和驱动模块,以及简单的机械模块,如舵机、机械臂等。小车控制中心采集传感器数据,并通过无线传输到上位机,由上位机下达各种控制命令;通过不断的学习,上位机也可以由自己来设计,如基于PC客户端的小车控制台、基于手机(IOS/Android)客户端,这些都是可以通过不断去学习来实现的,而不是局限于小车上的开发,结合各种应用平台设计也很重要。 三、具体功能介绍通信连接的说明
940采煤机控制系统说明书
400/940-WD采煤机控制系统 说 明 书
目录 一、注意事项 (1) 二、概述 (2) 三、技术参数 (2) 四、技术特点 (4) 五、安装 (5) 六、调试 (5) 七、操作 (6) 八、变频故障查询 (15) 附录原理图
一、注意事项 1、未经严格培训的人员不能操作和维修本系统,否则可能导致人员安全事故和经济损失。 2、操作人员必须严格按照讲义和说明书及产品图纸所规定规程进行机器的开机前检查,机器开、停及各功能操作。专业维修人员在维修电器系统时也必须严格按照讲义和说明书、产品图纸规定的规程进行维修。 3、本系统既有高压线路,又有微电子数字线路,并在有爆炸、可燃性气体、粉尘环境下工作。在调整、检查、维修和更换电器元部件时,必须在断电状态下进行工作。本系统所指断电的准确含义是切断机器的全部电源,并且在5分钟后,还须在井下供电处悬挂“停电维修”标志。 4、本系统的电子元部件更换必须使用青岛天迅电气公司提供的配件。否则可能发生安全事故和导致经济损失。 5、本系统配在具体型号的采煤机上后,根据合同上用户的要求,本公司将基本参数已设定完毕,用户没有专业的技术人员,不能擅自改变。如若需要改变参数,须与本公司联系处理。 6、本系统在包装,发货、运输过程中,应有特殊防潮,防倒、防冲击标志。 7、本产品存储条件为0~35℃,湿度为<95%,不得露天存放,每三个月空载通电一次,试车前应无载运行40分钟。
8、在十分钟内启停车次数不能超过5次。 二、概述 TX400/940-WD型采煤机电控系统是青岛天迅电气有限公司根据兖矿集团的具体要求和改进建议,研制出的新型电控系统,为鸡西煤机厂MG400/940-WD电牵引采煤机配套。 该系统在其它同类产品的基础上本着简单、可靠、便维修、便维护、便操作的原则进行设计制造。主控器部分选用日本松下可编程控制器,工控机选用研华高性能工控机,配置Windows https://www.360docs.net/doc/7110661936.html,操作系统和10.4’液晶屏,端头站部分选用高可靠性的小型人机界面,通过串行通信方式进行相互数据交换,操作简单便于维护。变频器采用ABB机芯。并配加遥控系统,操作简单。 三、主要技术参数 1、海拔高度低于2000米; 2、周围介质温度在-10~+35℃之间。 3、+25℃时,周围空气相对湿度不大于97%; 4、有瓦斯或煤尘爆炸危险的矿井; 5、无足以腐蚀金属和破坏绝缘气体的场所; 6、工作面倾角<=15°; 7、采煤机电源电压(V):3300 8、交流变频器: 型号:ACS800 制造商:ABB公司
关于脑电波控制飞行器的研究现状概述
关于脑电波控制飞行器的研究现状概述 【摘要】本文对新兴的脑电波控制技术在飞行器操作方面的应用作了描述,包括其概况、工作原理和过程中存在的问题,并对将来的发展概况和相关领域的关系作了分析和展望。 【关键词】脑电波控制技术无线传输飞行器 脑电波控制技术,是通过脑电波传感器探测大脑头皮电流变化和血液的流动信息,然后根据脑电波的不同特点来操控物体移动[1]。目前已应用在医疗设备、机器人以及玩具上。尤其是为残疾人开发专用的可以不用手脚来操作的轮椅、汽车、电脑、玩具等,将给他们带来极大便利。作为深入研究的脑电波控制飞行器也出现了多种形式,有平板式的、有立体式的、还有蜘蛛形式等等。但是其系统工作原理是基本一致的[2]。 1 系统工作原理 被控的飞行器上有可接受上下左右方向飞行的信号接收端口,这些端口通过无线方式接受来自控制软件发出的命令[3]。而这些命令的产生来自人的大脑想法。当控制者想让飞行器往上飞的时候,这种想法会使得大脑的活动产生一种脑电波[4],这种脑电波通过戴在控制者头上的附有感应器的头套捕捉到,然后通过逻辑程序产生信号,这个信号通过无线发送到达飞行器上的向上飞行接收端口,启动向上飞行的执行器,然后向上飞行[5]。所以看到的是控制者利用脑电波操纵飞行器在虚拟和真实世界中改变动作控制者在测试时完全不需要移动身体,只要戴上附有感应器的头套,望着电脑屏幕,就可以凭意念,自如控制飞行器。 2 存在问题 (1)理论上在生物学领域,当控制者产生向上飞行的意念的时候,一定有一个脑电波信号会强烈地突出,逻辑编程就是要的这个信号[6]。但是实际中我们知道大脑的活动有深层的潜意识和浅层的显意识,而这些活动能够产生的脑电波是不一样的,具体差别和捕捉方式有待进一步的研究。 (2)由于人脑属于生物个体,在一定时间内,重复多次的时候,同样的意念,却产生不了相同的脑电波,也就是说相同的意念,却产生不了相同的飞行动作。这在实验中可以看到,第一次实验的时候操作着可以很轻松地快速完成所规定的动作,等到第二遍做同样的动作的时候我们看到操作者嘴唇发紫,脸色发青,但是仍然没有能使飞行器。这是因为脑力消耗大,短时间内供血不足,不能使大脑产生足够能量的脑波。 (3)由于意念的深浅不一,人的同样的意念产生不了相同的脑波。另一方面大脑的供血机制也会使得相同的意念也产生不了相同的脑波,所以实际的操作
脑机接口真实发展状况
在有很多腾空出世的让人眼前一亮的黑科技,比如在2014腾讯WE大会上被誉为未来五大科技趋势之一的脑机接口。这也是PCB厂家为来可能涉及的领域之一。天马行空的意念控制,现实中的“阿凡达”,意念飞行,确实让人们对其充满期待,但到底现在的脑电科技到底发展到了什么程度呢?让我们客观的来审视一下脑机接口的发展。 客观的来说,脑机接口技术尤其是脑机接口设备还是处于非常初级的一个阶段。市场上真正研究脑机接口的商业公司屈指可数(Emotiv, OCZ以及神念Nerosky 是其最终比较有名的三个)。但是现阶段对于脑电波控制手段局限性还是非常大的。 一般我们常说的BCI是指非入侵式的脑机接口,就像我们常看到的将检测点击粘到头部以检测脑电波;而BMI则是入侵式的,也就是直接将检测电极放进你的颅内。 可能说起BMI会觉得特别有意思,但实际上,到目前为止已经有十年到十五年的时间内关于运用在人体上的BMI技术没有任何有意义的进展。BMI技术研究的主要方向是用来帮助截瘫病人和闭锁症患者。现在生产用于研究用的BMI设备的公司确实不少,像Plexon, Neuralynx, Rippl, BlackRock Microsystems, 以及TDT都是其中名气比较大的。但是除了美国布朗大学研制的BrainGate II运用到临床试验上外,没有一个公司的产品用于真正意义上的临床试验。 BrainGate II是针对截瘫患者做的试验,用BMI让截瘫患者控制一个机械手臂
成功的喝到了杯子里的水。这是一个不完善的试验,所以并不不能广泛应用。因为还有很多关键性的问题得不到解决,比如以下三点问题: 1. 脑机接口技术需要同时记录成千上百万个的神经元的活动,但是目前我们的技术只能达到同时记录几百个神经元。目前还没有一个系统能够同时记录那么多神经元的活动。这点极大的限制了BMI目前的研究。值得注意的是有些研究人员提出这个问题并没有想象中的那么棘手,因为有可能通过找到最关键的那几个神经元就可以完成脑电波的控制。 2. 体内排斥反应:安装进脑部的感应电极并不受人体的免疫系统的欢迎,这就可能有潜在性的长期副作用。而且安装进脑部的检测传感器也可能会随着时间而失效。这个问题的解决方案有将极小的对人体无害的感应电极放进脑内以至于免疫系统没有发现(暂时还不知道有没有这种可能),或者是制造一种生物合成感应电极,或者是一些还没发现的方法。 3. 开颅,安装脑部传感器的手术非常危险。 但是我们知道的是,脑机接口肯定会有在社会上广泛应用的一天,而且随着最近几年科技飞速的发展,谁都不会想到这一天是不是会马上到来。而且,值得注意的是,其实我们现在每个人都已经拥有自己的意念控制设备——你的双手。
脑机接口的描述和综述
脑机接口的综述 ------自动化1班3008203240 付亮脑机接口(brain-computer interface,BCI),有时也称作direct neural interface或者brain-machine interface,它是在人或动物脑(或者脑细胞的培养物)与外部设备间建立的直接连接通路。在单向脑机接口的情况下,计算机或者接受脑传来的命令,或者发送信号到脑(例如视频重建),但不能同时发送和接收信号。而双向脑机接口允许脑和外部设备间的双向信息交换。 研究和发展BCI技术最主要的目的在于设计出基于脑电信号的控制装置以帮助严重的残疾患者(例如肌萎缩性侧索硬化、脑干或脊髓损伤)以及严重的交流障碍患者恢复控制和交流功能[4]。脑机接口还能应用到军事和娱乐领域与此同时研究脑一机接口还是人类对脑电活动规律不断认知的过程j。目前,BCI系统主要用于那些行为有生理上有缺陷的例如偏瘫肌萎缩性(脊髓)侧索硬化患者或脑瘫的人们提供与外界交流的手段。 有几个问题对于BCI技术的进一步发展和更为广泛的应用起着至关重要的作用。第一,即是信号的传输速度。现有的BCI系统是相对低带宽的设备,最多所能提供的信息传输速度为5~25 bit·min_。。以这样的速度,输入一个简单的单词都可能要花几分钟的时间。如果速度能够提高,那么BCI系统将为人类与外部环境的交流提供更为有用的途径。第二个问题就是训练使用者使用系统所需要的时间。BCI系统不能依靠外部刺激提供直接的控制来控制环境,但是这些BCI系统通常要求使用者经过几个小时甚至是几个月的训练。基于诱发电位的BCI系统可以不要求使用者必须经过训练,但是对环境有所要求。第三是关于医学创伤问题。伤害越小那么这门技术才可能被更为广泛的应用。植入式电极可以提供稳定的定位,免除了假象,同时具有更高的信噪比(SNR)。但是在这种系统中存在的一个难题就是如何确定定位的位置以及电极的个数。另一个难点就是怎样长时间的保持系统的稳定性。头皮心电图描记是无创的,但是它的信噪比相对较低且与电极的空间位置有关
脑机接口及其主要目标应用研究的综述
脑机接口及其主要目标应用研究的综述 学习科学方法研究大作业 东南大学李晓萌 1脑机接口简介 计算机可以奖大脑的信号解码转化成人类的意图或者目的,进而直接通过控制机器完成这 个意图的功能,现在已经出现了实现它的现实技术可能性,这种类型的设备被称作脑机接 口(Brain-computer interface,BCI,有时也称为direct neural interface或者 brain-computer interface)[1],这些神经义肢技术的发展对于有运动障碍的患者有很大的 意义,可以通过大脑控制外部辅助设备如计算机、语音合成器、辅助应用和神经假肢等来 加强他们与外界环境的交流和交互,可以增强他们的独立性,提高生活质量并且降低社会 成本。 1.1脑机接口发展 脑机接口的发展经历了三十多年的历程,在过去的十几年中,脑机接口的研究群体迅速壮大。第一次和第二次脑机接口国际研讨会分别于1999和2002年召开。 Phillip Kennedy及其同事用锥形营养性电极植入术在猴上建造了第一个皮层内脑机接口。1999年,哈佛大学的Garrett Stanley试图解码猫的丘脑外侧膝状体内的神经元放电信息 来重建视觉图像。到2000年,Nicolelis的研究组成功实现了一个能够在夜猴操纵一个游 戏杆来获取食物时重现其手臂运动的脑机接口[2]。 目前,世界上已经有很多个实验室实现了真正意义上的脑机接口。 1.2脑机接口的分类 随着对脑机接口技术的研究的深入,脑机接口系统的种类日趋繁多,分类方式也多样化。 按照方向可以分为双向脑机接口系统和单向脑机接口系统;按信号采集方式可以分为非植 入式脑机接口和植入式脑机接口;按信号类型可分为基于头皮脑电信号(EEG)的脑机接口,基于功能性核磁共振(fMRI)的脑机接口和基于近红外光谱分析(NIRS)的脑机接口;按 信号生成类型可分为自发式脑机接口系统和诱发式脑机接口系统[1]。 1.3脑机接口系统简介 图1显示了脑机接口系统模型的组成和各部分间的联系,它主要由用户、信号采集部分、 信号处理部分、控制部分、反馈部分和设备组成。
1180采煤机电控系统说明书
TX1180电控系统使用说明书青岛天迅电气有限公司
目录 概述 (1) 安全须知 (2) 主要技术参数 (3) 系统组成和工作原理 (4) 操作 (5) 电控系统安装调试 (6) 故障检修 (7) 附录: 电控系统器件明细表 电控系统原理图
一概述 感谢您使用青岛天迅电气有限公司生产的采煤机电控系统。TX1180型采煤机电控系统是青岛天迅电气有限公司根据鸡西煤机厂的技术要求和改进建议,研制开发的机载式交流变频调速电控系统,为鸡西煤机厂MG500/1180-WD电牵引采煤机配套。 该系统在其它同类产品的基础上本着简单、可靠、便于操作和维护的原则进行设计制造。主控器部分选用可编程控制器作为控制核心;选用高可靠性嵌入式工控机集中监控煤机运行状态,配置Windows https://www.360docs.net/doc/7110661936.html,操作系统和10.4’液晶屏;端头站部分选用小型人机界面,通过串行通信方式和主控器进行数据交换,操作简单便于维护;配备无线遥控系统,操作安全便捷;变频器采用进口元器件。系统整体性能稳定可靠,适用于震动,高温,潮湿和强电磁干扰的矿山作业环境。 二安全须知 1、未经培训的人员不得操作和维修本系统,以免引起人身事故和设备损坏。 2、操作人员应认真阅读本说明书,并按照煤矿安全规程规定进行设备的开机前检查,机器开、停及各功能操作。维修人员在检修设备时也须按照煤矿安全规程规定进行检修。 3、本系统有高压线路和微电子数字线路,并在有瓦斯、粉尘爆炸危险的环境下工作,因此必须在断电5分钟后,方可开启箱体盖板进行检修操作。
4、本系统的配件更换须使用青岛天迅电气公司提供的配件,以免引起安全事故和导致经济损失。 5、为保证系统安全运行,非专业技术人员不得擅自改变系统设定参数。 6、本系统在包装、运输和存储过程中,应做到防尘、防潮、防倒、防碰撞。 7、本产品存储条件为0~35℃,湿度为<95%,不得露天存放,设备投入使用前应进行空载试运行。 8、在十分钟内启停车次数不能超过5次。 三、主要技术参数 1、海拔高度低于2000米; 2、工作温度:-10~+65℃。 3、+25℃时,周围空气相对湿度不大于97%; 4、无足以腐蚀金属和破坏绝缘气体的场所; 5、采煤机供电电压:3300V 6、变频器: 适配电机功率:75KW×2 输入电压:380 V (-15%~+10%) 输出频率范围:0~50Hz 四:电控系统组成和工作原理 MG500/1180-WD型采煤机装机功率1180Kw,截割电机功率500K w×2,牵引电机功率75K w×2,泵电机功率30Kw,采煤机供电电
基于P300的脑机接口概述
基于P300的脑-机接口概述 一、P300电位 1.什么是P300 所谓P300是当视觉受到外界特殊刺激时会脑电信号出现一个波峰。其峰值大约出现在相关事件发生后的300ms。P300 电位是脑- 机接口中经常使用的信号,是事件相关电位的一种。P300电位的产生主要依赖于人对某种刺激的反应而不依赖身体状况,通常由包含靶刺激的小概率事件和非靶刺激的大概率事件的刺激序列(oddball paradigm)诱发。 2.P300的两个基本条件 1)相关事件。 2)小概率。P300波的标志性特点是它对靶概率的敏感性。靶概率越低,P300振幅就越大, 二、基于P300的BIC系统的研究 1.刺激与实验过程 实验1 用于诱发P300的Oddball刺激序列如图1所示,目标行,目标列选择过程示意如图2所示。 图1 图2 受试者位于计算机前面对屏幕给出的Oddball刺激序列,为6行6列的字符矩阵排列。屏幕显示适当的色彩和强度,背景色为黑色,字符以白色显示。 刺激的产生是通过随机地加亮字符矩阵的某一行或某一列,一次实验循环是6行及6列均加亮一次,实验要求受试者集中注意他要注视的字符。当包括他要注视的字符的行或列加亮时,此为靶刺激,要求受试者对此进行反应,予以计数。 小概率出现的靶刺激可以诱发P300,如果确定P300出现时刻对应的靶刺激(属于哪一行哪一列)出现的时刻,便可以确定出受试者所注视的字符,从而达到交流的目的。 实验2 5 个十字线表示5 种选择, 受试者只关注其中的一个。在实际应用中, 这5 个选择可以表示
5 种命令。实验开始后,首先有一个实验准备期,然后一个特定的对象会在这5 个十字线上以随机的顺序连续出现,相临两次对象的出现间隔一定时间。当目标刺激出现时, 受试者通过心里计数来产生响应。 数据记录采用5个导联,分别是T 7、T 8、Cz、Pz 和Oz。参考电极被放置在头顶附近, 为系统的标准设置。 2.采集系统的设计
搅拌站控制系统使用说明书
混凝土搅拌站控制系统使用说明书 长沙中联重工科技发展股份有限公司
目录 一.产品简介........................................................ - 1 - 二.系统组成........................................................ - 2 - 2.1 硬件需求.................................................................................................................................... - 2 - 2.1.1上位机部分....................................................................................................................... - 2 - 2.1.2 下位机部分...................................................................................................................... - 2 - 2.1.3 通信部分.......................................................................................................................... - 3 - 2.1.4 打印机部分...................................................................................................................... - 3 - 2.1.5 仪表部分.......................................................................................................................... - 3 - 2.1.6 动力保护、控制部分...................................................................................................... - 3 - 2.1.7监控系统部分.................................................................................................................. - 3 - 2.2 软件需求..................................................................................................................................... - 3 - 2.2.1 操作系统.......................................................................................................................... - 3 - 2.2.2数据库:.......................................................................................................................... - 4 - 2.2.3 其他工具.......................................................................................................................... - 4 - 三.系统安装........................................................ - 5 - 3.1硬件安装方法............................................................................................................................ - 5 - 3.1.1 动力部分和监控部分的安装:...................................................................................... - 5 - 3.1.2 上位机的安装.................................................................................................................. - 5 - 3.1.3 打印机的安装.................................................................................................................. - 5 - 3.1.4 可编程的安装.................................................................................................................. - 5 - 3.2 软件安装方法............................................................................................................................. - 6 - 3.3 系统登陆..................................................................................................................................... - 6 - 四.系统调试........................................................ - 8 - 4.1 校秤............................................................................................................................................. - 8 - 4.2 调试输出信号............................................................................................................................. - 9 - 五.系统操作....................................................... - 10 - 5.1 准备工作................................................................................................................................... - 10 - 5.1.1 关于手动操作台............................................................................................................ - 10 - 5.1.2 电源开启顺序................................................................................................................ - 10 - 5.2 生产信息录入.......................................................................................................................... - 10 - 5.2.1 基本信息........................................................................................................................ - 10 - 5.2.1.1 客户管理.......................................................................................................... - 10 - 5.2.1.2 车辆管理...........................................................................................................- 11 - 5.2.1.3 工程管理.......................................................................................................... - 12 - 5.2.1.4 系统管理.......................................................................................................... - 13 - 5.2.2 生产信息........................................................................................................................ - 15 - 5.2.2.1 生产任务单...................................................................................................... - 15 - 5.2.2.2 配比通知单...................................................................................................... - 17 - 5.2.2.3 生产记录(生产明细).................................................................................. - 17 - 5.2.2.4 生产调度(生产登记).................................................................................. - 18 - 5.2.2.5 手工录入.......................................................................................................... - 20 - 5.2.2.6 生产统计.......................................................................................................... - 21 -