基于matlab的测量导线描绘
测绘学院学号:2009301610208 夏少波手机:
基于MATLAB的测量导线描绘
摘要: 本文从导线的描绘出发,提出了该问题的MATLAB解决方法。给出了数据的处理结果和图表。并且,设计了二维和三维的代码描述。其中对待处理的数据有一些优化,但计算方法和计算的逻辑是没有问题的。最后,MATLAB对这个问题的解决也较为令人满意。
关键字: 控制测量导线代码运行结果MATLAB
任何测量工作都会产生误差,而误差在绝对意义上是不可避免的,所以在测量工作中必须采用一定的方法来控制误差的范围,以期达到工作需求。测量工作中遵循“先整体后局部,先控制后碎部”的原则。简而言之就是在工作区域内建立一定精度的由一定数目的已知坐标点构成的几何图形,然后在几何图形内进行测量。在测量过程中,我们可以通过各个已知点的坐标来验算测得的未知点的坐标。这样通过不断地检核、测量、检核,成果的误差就可以控制在一定范围内。其中,已知点被称作“控制点”,几何图形被称为“控制网”,这种测量方法被称为“控制测量”。
一般意义上的控制测量可以分为“平面控制测量”和“高程控制测量”。平面控制测量是基平面坐标系X-Y,而高程控制测量是基于高程H的。目前,随着测绘技术的发展,也出现了把两种控制测量结合起来的“三维控制测量”。
控制网根据其精度从高到低大致可以分为一、二、三、四等,精度越高的点数目越少。点数不够自然无法形成有效地控制网。因此,测量工作中需要通过已知的几个点,“一生二,二生三”,绘出一个可用于实际工程的控制网。“一生二,二生三”的过程需要已知点前后通视(即互相看得见),然而,在城市中,由于建筑物较多,视线不好,往往会出现已知点之间无法通视的现象。所以就引入了导线测量(traverse survey)。
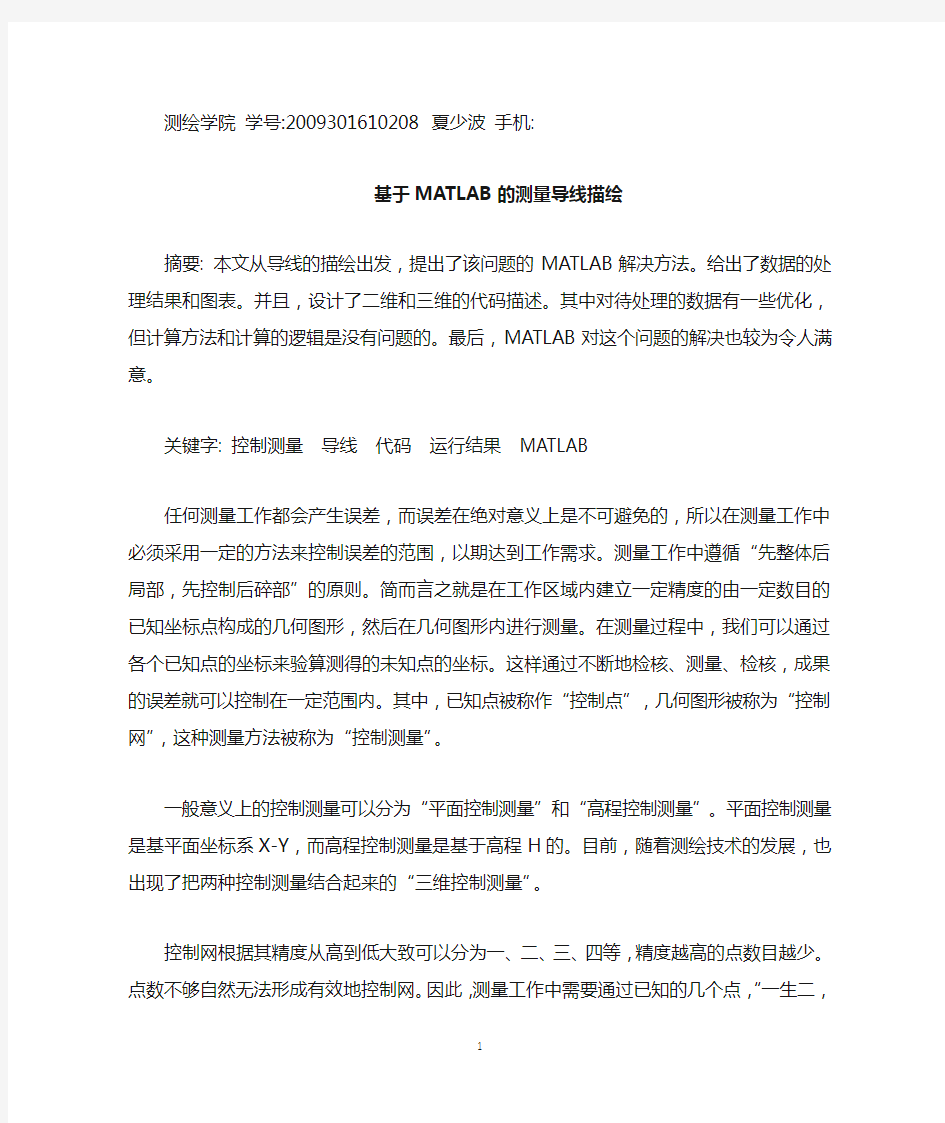
导线测量又有很多分类,在此就不在赘述了。下面来介绍导线测量中的附和导线。所谓附和导线就是:“导线起始于一个已知控制点而终至于另一个已知控制点”。通过测量导线上未知点与已知控制点坐标的对比、计算,进行平差(控制误差的一种手段),得出一条导线上的各个待测点的坐标。这个过程就是导线测量的主体步骤了。导线示意图如下
根据导线示意图,这里有五点需要说明:
一、测绘中,坐标系很多,一般导线测量使用的是“平面直角坐标系”,之所以打上了双引
号,是因为,测量工作中的坐标系是以正北方向(竖轴)为X方向,横轴为Y方向,极坐标中顺时针旋转方向为正方向。
二、图中2、3等点要安放仪器进行测量,称这些点为测站。
三、A、B、C、D为已知点。P2、P3等为待测点。导线测量中需要计算出各个点的坐标。
四、关于P1左、P2左等角度,为测绘中所谓的左角。所谓的左角可以通过导线的前进方向
来确定。比如,在这张图中,测量的顺序为A-B-…-C-D,那么前进方向即为A-B-…-C-D,而前进方向的左手边的角度就是左角了(右角亦然,并不规定一定要测哪个角,计算方法略有不同而已)。这些角一般称作转折角。
五、平面的导线控制测量需要在一测站测相邻的左右测站之间的夹角(如图中的P1),该测
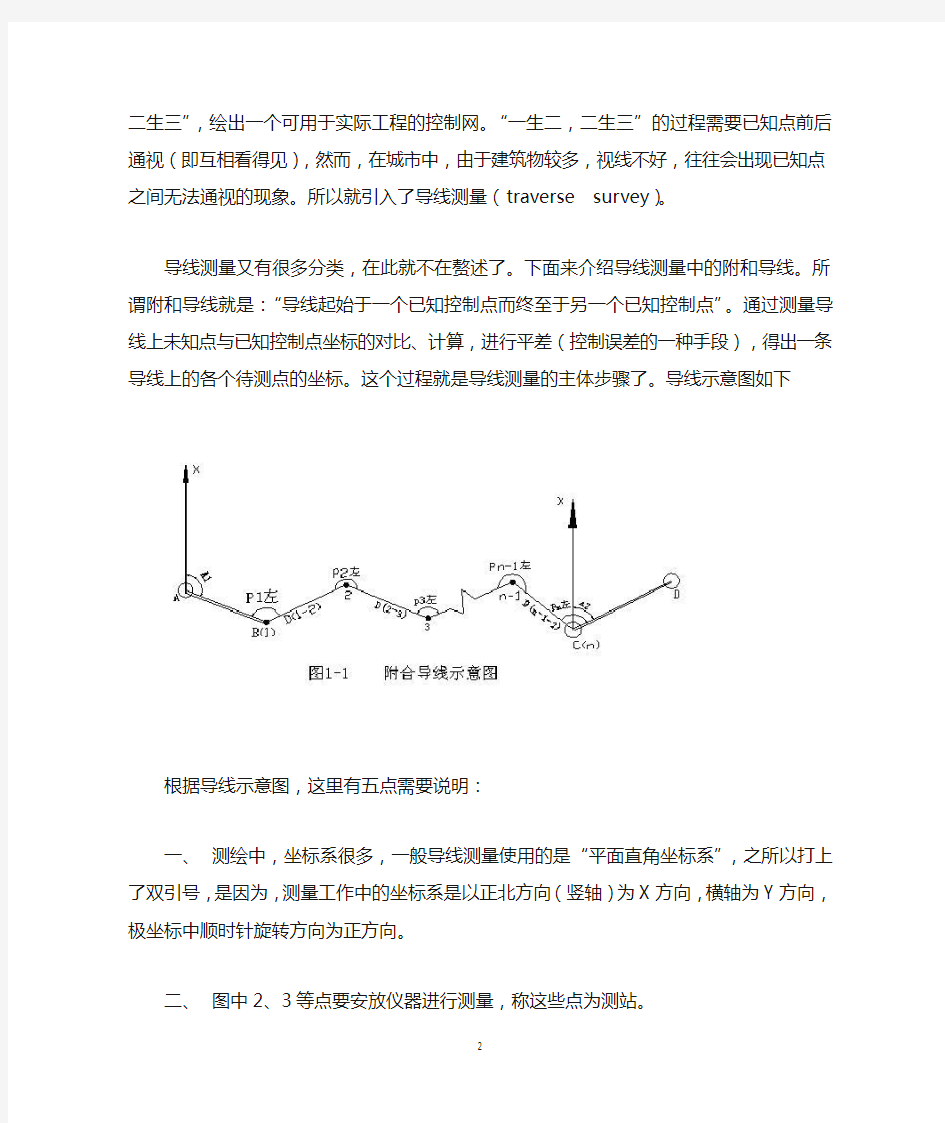
站到前进方向上的下一测站的距离(如图中的D(1-2),也称作边长)。如果把高程算进去,还需要获得两测站之间的高差。而获得高差数据的方法很多,一般可以通过水准测量或三角高程测量获得。在这里介绍一下三角高程的基本原理。三角高程测量的基本原理就是利用三角形各边角关系来获得所需数据。如图二;已知A、B两点的水平距离D,和一个夹角α,通过计算D×tan(α),再通过加减测量仪器高就可以获得A、B两点的高程差。当然实际运作中还要考虑地球曲率、大气温度等误差。在本文中,我对模型作了简化,对仪器高和地球曲率等因素做了默认设置。
图二
以上为本文要讨论的问题背景做了一个比较完整的描述下面进入问题的主体。
一、提出问题
有一测量小组通过查询获得了三个已知点的坐标,又通过野外测量,做了导线,并获得了导线中的转折角和边长,同时他们也获得了各个测站的α角。数据如下:
A列是边长,B列是左角值A列是α角值
现在要求获得各个待测点的坐标,并描绘出导线的形状,对比已知点得出测量值与实际获得坐标值的偏差。
二、对问题的分析和方案的产生
现在获得的数据已经可以画出导线了。问题是坐标系是不同的,那么可以进行转换。MATLAB数学坐标系的Y轴是正北方向,那么我们规定:Y轴北方向,X轴为东方向。化为极坐标时,顺时针为角的方向。
确定坐标系后,我们可以根据已知坐标把做边长和转折角转化为坐标值。计算方法:
α1=α2+α(转折角)-180°;
X1=X2+D(边长) ×sin(α1);
Y1=Y2+D(边长) ×cos(α1);
注:此处的坐标转化考虑到坐标系的转化,故sin、cos互换了。
通过以上计算获得了这些数据还是不够的。还需要用户输入已知点的坐标来对比测量结果。同时为了增加代码的通用性,可以由用户输入所需处理的文件名称,以及初始坐标值。同时,还可以通过用户选择,来实现计算和描绘平面的导线或者是三维的导线。通过用户选择那个函数,调用了二维描述和三维描述这两个函数。从而实现整个功能。
如上所示,整个框架已经构成了。
三、描述解决方案
首先给出可供用户选择的函数:
f unction begin ()
%这个函数给了用户选择。2D or 3D?
input('welcome to use my program£?press Enter to star£?')
N = input('choose 1 for 2D,choose 2 for 3D')
switch(N)
case 1
daoxian();
case 2
gaocheng();
end
再给出描画二维导线的函数描述:
function daoxian()
% this function is for 2D
FILENAME = input('what is the name of date file?')%获取用户所要处理的文件名
X0 =input('input the x:')
Y0 =input('input the y:')%用户输入已知坐标。
Angle = atan(Y0/X0); %用户输入已知的坐标点后,进行角度的转化,使之能在坐标系中正常实现。
A=xlsread(FILENAME); %获取用户所要处理的文件内容
L=A(:,1);
L=L';
CT=A(:,2);
CT=CT';%以上是对获取数据的处理,使之符合矩阵运算。
GT=[];
CT(1)=Angle;
CT=(CT./(360))*2*pi;%把一般测得的360制角转化为2Pi制
X=[0,X0,0,0,0,0,0];
Y=[0,Y0,0,0,0,0,0];%初始化X,Y
GT(3)=CT(1)+CT(2)-pi;
I=4;
for k=1:4 %转化各个转角,使结果符合坐标系的运算
GT(I)=CT(I-1)+GT(I-1)-pi;
I=I+1;
end
for I=1:7
if GT(I)<0 %对小于0度的角进行转换
GT(I)=GT(I)+2*pi;
end
if GT(I)>2*pi %对大于360度的角进行转换
GT(I)=GT(I)-2*pi;
end
end
GT(1)=0;
GT(2)=0;
I=3;
for J=1:5 %核心计算,获得坐标。
X(I)=X(I-1)+L(I-1).*sin(GT(I));
Y(I)=Y(I-1)+L(I-1).*cos(GT(I));
I=I+1;
end
OUTPUT = [X' ,Y'] % 输出数据
save OUTPUT %保存数据。
plot(X,Y,'b - O');%画图。
axis('equal');
xlabel('X');
ylabel('Y,北方向');
title('2D-----------map'); %以上为坐标的优化
grid on;
hold on;
% 对比已知点,求出坐标差,并描点。
CONx = input('please enter the x of control point:');
CONy = input('please enter the y of control point:');
plot(CONx,CONy,'r o'); %描出用于检核的点。
delx =X(7)- CONx %输出相差X,Y坐标大小。
dely =Y(7)- CONy
函数的描述和解释代码的后面已经阐述,现在直接给出三维的函数描述:
function gaocheng()
%This function is for 3D
FILENAME1 = input('what is the name of lengt-hdate file?')%获得用户所需要处理的文件名。FILENAME2 = input('what is the name of high-date file?')
X0 =input('input the x:')%获得初始的起算坐标
Y0 =input('input the y:')
Z0 =input('input the z:')
Angle = atan(Y0/X0); %计算出起算的两点间在坐标系中的夹角。
A=xlsread(FILENAME1);%获得用户提供的数据
L=A(:,1);
L=L';
CT=A(:,2);
CT=CT'; %以上是对获取数据的处理,使之符合矩阵运算。
GT=[];
CT(1)=Angle; %用户输入已知的坐标点后,进行角度的转化,使之能在坐标系中正常实现。CT=(CT./(360))*2*pi;%转化角度
X=[0,X0,0,0,0,0,0];%初始化坐标值
Y=[0,Y0,0,0,0,0,0];
CT(1)=Angle;
GT(3)=CT(1)+CT(2)-pi;
I=4;
for k=1:4 %计算获得可计算的坐标方位角
GT(I)=CT(I-1)+GT(I-1)-pi;
I=I+1;
end
for I=1:7
if GT(I)<0 %对小于0度的角进行转换
GT(I)=GT(I)+2*pi;
end
if GT(I)>2*pi %对大于360度的角进行转换
GT(I)=GT(I)-2*pi;
end
end
GT(1)=0;
GT(2)=0;
I=3;
for J=1:5 %核心计算,获得坐标值。
X(I)=X(I-1)+L(I-1).*sin(GT(I));
Y(I)=Y(I-1)+L(I-1).*cos(GT(I));
I=I+1;
end
HT=xlsread(FILENAME2);% 获得用户提供的高程α角。
HT=HT';
HT=(HT./(360))*2*pi;% α角转化;
LT=[];
for k=1:5
LT(k)=L(k+1);
end
T=LT.*tan(HT);%通过tan函数获得H的初始值。
Z=[];
Z(1)=0;
Z(2)=Z0;
for k=3:7 %获得H的值。
Z(k)=Z(k-1)+T(k-2);
end
OUTPUT = [X' ,Y',Z'] %输出计算结果
save OUTPUT;
plot3(X,Y,Z,'k - O'); %画出图像。
axis('equal');
xlabel('X');
ylabel('Y,北方向');
zlabel('H,高程');
grid on;
title('3D--------map');%以上为坐标的优化
hold on;
%获得已知点,进行比较,描绘,输出结果
CONx = input('please enter the x of control point:');
CONy = input('please enter the y of control point:');
CONz = input('please enter the z of control point:');
plot3(CONx,CONy,CONz,'r o') %描出用于检核的点。
delx=X(7)- CONx % 输出相差的坐标值
dely=Y(7)- CONy
delyz=Z(7)- CONz
现在整个函数的实现已经给出来了。其中,function begin ()放在一个M文件里,function daoxian()放在一个M文件里,function gaocheng()放在一个M文件里。
其实,第2D和3D就差了一个坐标元素。主体函数还是差不多的。不过,为了表达清楚,我还是把它们都写出来了。我在写这些函数的时候,遇到了一些矩阵数组计算的小问题,最后虽然得到了解决,但我一直怀疑是不是有更好的描述方法。
四、运行MATLAB,获得结果
首先,我要说明的是,本来我是想在word里直接运行代码的,但是,由于不同的M文件,这样的表达,我觉得不是很清晰(可能我方法不对),所以就选择了截图运行过程的方法。
运行时首先运行begin函数,选1,再按要求输入所要求调用的文件名:导线数据.xlsl,再输入起算点的X,Y坐标,此处是100,200。运行后,再根据提示输入控制点的坐标进行检核,
这里是(-36,350)。整个输入过程就结束了。
运行过程如下:
启动界面
下图显示的是输出的X,Y的坐标值
下图显示的delx,dely是与控制点相差的数值
下图显示的是导线的图像,其中红点为检核所用的控制点(此处几乎重合)
现在来看看三维导线的运行。首先调用begin函数,选2,按要求输入文件名,再输入起算点的坐标,这里是(100,200,300);运行如下
即输出了计算结果,然后按要求说如已知控制点的坐标用于检核。这里输入(170,390,640),则其输出了测算点与控制点差值。结果如下:
最后我们可以看一下三维图像的运行结果(如下图),注意,红点是用于检核的已知坐标的点,不得不提一下的是,实际操作中,精度往往比较高,这里为了突出误差,便于观察和理解图像,把误差放大了。
运行到这里可以说所有的结果都获得了,问题得到了解决。
五、总结
这个问题的解决其实很不完美。首先,这个模型不是实际的模型,我对其中的数据进行了优化(如角度和长度的位数限制),并且祛除了一些比较复杂的能够减少误差的计算,只保留基本的几种思想方法,对导线的测量进行了描绘。但是问题的全貌,和数据的主要处理方法都到位了。这个问题当然可以拓展,比如,直接画出初步平差后的图像。这个问题就复杂多了,我这些天的算法设计总是有问题,所以就不好拿出来了。
另外,这个程序可重用性不高,虽然能实现对不同数据源文件的读取,用户自主输入起算和检核坐标,但是,如果测站数不一样,还需要修改函数内部的部分数据。这个方面的问题,我目前还不知道如何解决更好。我以后会边学习,边思考,找出好方法。
还要说明的是,对于导线的描绘,测绘有专门的软件如CASS等,其对于专业内的绘图功能自然比MATLAB好些。此处的学习意义大于运用意义。
最后不得不说一下我对这门课的感受,因为MATLAB这门选修课是我修过的“最有技术含量”的公选课。只可惜我目前只学了半个学期的专业课,所以很多专业的应用我都不能“立即”去开发。但是通过这门课的学习和这次结课作业的练习,我认识了MATLAB这种工具,知道了他的强悍功能。同时,我还发现了和自己专业相关的工具箱,如“Mapping Toolbox”等。通过互联网,我还了解到MATLAB在“GPS”的计算还有“平差”的计算中有较多的的应用。我想以后有了机会,具备了能力,我是会尝试一下各种应用的。
参考文献
《MATLAB7及工程问题解决方案》(美)Delores M.Etter 邱李华译2006.3 《MATLAB基础及其应用》北京大学周开利邓春晖2009.11
MATLAB7.6.0帮助
《数字测图原理与方法》武汉大学2010 .7
参考网站
MATLAB中文论坛:https://www.360docs.net/doc/7116252685.html,
MATLAB百度贴吧:https://www.360docs.net/doc/7116252685.html,/f?kw=matlab
MATLAB教程网:https://www.360docs.net/doc/7116252685.html,
编程爱好者MATLAB讨论区:https://www.360docs.net/doc/7116252685.html,/club/bbs.asp?bbsid=57
2010年11月12日星期五
matlab课程设计题目
课题一: 连续时间信号和系统时域分析及MATLAB实现 课题要求: 深入研究连续时间信号和系统时域分析的理论知识。利用MATLAB强大的图形处理功能、符号运算功能以及数值计算功能,实现连续时间信号和系统时域分析的仿真波形。 课题内容: 一、用MATLAB实现常用连续时间信号的时域波形(通过改变参数,分析其时域特性)。 1、单位阶跃信号, 2、单位冲激信号, 3、正弦信号, 4、实指数信号, 5、虚指数信号, 6、复指数信号。 二、用MATLAB实现信号的时域运算 1、相加, 2、相乘, 3、数乘, 4、微分, 5、积分 三、用MATLAB实现信号的时域变换(参数变化,分析波形变化) 1、反转, 2、使移(超时,延时), 3、展缩, 4、倒相, 5、综合变化 四、用MATLAB实现信号简单的时域分解 1、信号的交直流分解, 2、信号的奇偶分解 五、用MATLAB实现连续时间系统的卷积积分的仿真波形 给出几个典型例子,对每个例子,要求画出对应波形。 六、用MATLAB实现连续时间系统的冲激响应、阶跃响应的仿真波形。 给出几个典型例子,四种调用格式。 七、利用MATLAB实现连续时间系统对正弦信号、实指数信号的零状态响应的仿真波形。 给出几个典型例子,要求可以改变激励的参数,分析波形的变化。 课题二: 离散时间信号和系统时域分析及MATLAB实现。 课题要求: 深入研究离散时间信号和系统时域分析的理论知识。利用MATLAB强大的图
形处理功能、符号运算功能以及数值计算功能,实现离散时间信号和系统时域分析的仿真波形。 课题内容: 一、用MATLAB绘制常用信号的时域波形(通过改变参数分析其时域特性) 1、单位序列, 2、单位阶跃序列, 3、正弦序列, 4、离散时间实指数序列, 5、离散时间虚指数序列, 6、离散时间复指数序列。 二、用MATLAB实现信号的时域运算 1、相加, 2、相乘, 3、数乘。 三、用MATLAB实现信号的时域变换(参数变化,分析波形的变化) 1、反转, 2、时移(超时,延时), 3、展缩, 4、倒相。 四、用MATLAB实现离散时间系统卷积和仿真波形 给出几个典型例子,对每个例子要求画出e(k),h(k),e(i),h(i),h(-i),Rzs(k)波形。 五、用MATLAB实现离散时间系统的单位响应,阶跃响应的仿真波形 给出几个典型例子,四中调用格式。 六、用MATLAB实现离散时间系统对实指数序列信号的零状态响应的仿真波形 给出几个典型例子,要求可以改变激励的参数,分析波形的变化。 课题三: 连续时间信号傅里叶级数分析及MATLAB实现。 课题要求: 深入研究连续时间信号傅里叶级数分析的理论知识,利用MATLAB强大的图形处理功能,符号运算功能以及数值计算功能,实现连续时间周期信号频域分析的仿真波形。 课题内容: 一、用MATLAB实现周期信号的傅里叶级数分解与综合 以周期矩形波信号为例,绘出包含不同谐波次数的合成波形,观察合成波形与原矩形 波形之间的关系及吉布斯现象。
软件无线电实验matlab程序
附录 (1) 、SDR 低通采样理论 %parameters fs = 5e4;%采样频率注意 或 2 倍以上 f = 5e3;%信号的频率 N = 1024; n = 1:1024; t= n/fs; deta_t = 1/fs;% 采样间隔 %signals sn = sin(2*pi*f*t);% 时域采样后的信号w = hanning(N);% 加汉宁窗sn1 = sn.*w';% 加窗减少频率泄露 Sn_fft = fft(sn1);% 频域信号 Sn = abs(Sn_fft); %figures figure(1); plot(t,sn); title('s(n)的时域波形'); grid on; xlabel('t'); xlim([0 0.021]); ylabel('幅度'); figure(2); xax = [-N/2:N/2-1]/N*fs/1000;% 将f 轴单位变为kHz plot(xax,20*log10(fftshift(Sn))); title('s(n)的频域波形'); grid on; xlabel('f(kHz)'); ylabel('幅度(dB)'); ylim([-200 100]); (2) 、SDR 带通采样理论 %parameters f = 1.3e3;% 基频 fo = 100e6;% 载波频率 N = 1024; fs = 4e3;%采样频率 t= 0:0.001:2; st = cos(2*pi*(f+fo)*n/fs);% 带通抽样信号 St1 = fft(st); St = abs(St1); st0 = cos(2*pi*(f+fo)*t); St0 = fft(st0); St2 = abs(St0); figure(1); plot(n,st); title('带通抽样信号时域图像’); xlabel('n'); xlim([0 1026]); ylabel('幅度'); grid on; figure(2); plot(t,st0); title('带通原始信号时域图像'); xlabel('t'); ylabel('幅度'); grid on; figure(3); xax =[-N/2:N/2-1]/N*fs/1000; plot(xax,20*log10(fftshift(St))); title('带通信号抽样后频域图像’); xlabel('f(kHz)'); ylabel('幅度(dB)'); grid on; (3) 、频率调制信号 %频率调制 %parameters fs = 1e3;%抽样频率 ts = 1/fs;%采样率 N = 1024; n = 0:1:N-1; t = n/fs; kf = 100.1; A = 100; Aw = 10; fc = 10000;% 载波频率fm = 10;% 调制信号频率mf = kf*Aw/(2*pi*fm); %signals s1 A*cos(2*pi*fc*t).*cos(mf*sin(2*pi*fm*t)); s2 fs 至少是f 的2 倍n = 1:1024;
MATLAB课设报告
课程设计任务书 学生姓名:董航专业班级:电信1006班 指导教师:阙大顺,李景松工作单位:信息工程学院 课程设计名称:Matlab应用课程设计 课程设计题目:Matlab运算与应用设计5 初始条件: 1.Matlab6.5以上版本软件; 2.课程设计辅导资料:“Matlab语言基础及使用入门”、“Matlab及在电子信息课程中的应 用”、线性代数及相关书籍等; 3.先修课程:高等数学、线性代数、电路、Matlab应用实践及信号处理类相关课程等。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1.课程设计内容:根据指导老师给定的7套题目,按规定选择其中1套完成; 2.本课程设计统一技术要求:研读辅导资料对应章节,对选定的设计题目进行理论分析, 针对具体设计部分的原理分析、建模、必要的推导和可行性分析,画出程序设计框图,编写程序代码(含注释),上机调试运行程序,记录实验结果(含计算结果和图表),并对实验结果进行分析和总结。具体设计要求包括: ①初步了解Matlab、熟悉Matlab界面、进行简单操作; ②MATLAB的数值计算:创建矩阵矩阵运算、多项式运算、线性方程组、数值统计; ③基本绘图函数:plot, plot3, mesh, surf等,要求掌握以上绘图函数的用法、简单图形 标注、简单颜色设定等; ④使用文本编辑器编辑m文件,函数调用; ⑤能进行简单的信号处理Matlab编程; ⑥按要求参加课程设计实验演示和答辩等。 3.课程设计说明书按学校“课程设计工作规范”中的“统一书写格式”撰写,具体包括: ①目录; ②与设计题目相关的理论分析、归纳和总结; ③与设计内容相关的原理分析、建模、推导、可行性分析; ④程序设计框图、程序代码(含注释)、程序运行结果和图表、实验结果分析和总结; ⑤课程设计的心得体会(至少500字); ⑥参考文献(不少于5篇); ⑦其它必要内容等。 时间安排:1.5周(分散进行) 参考文献: [1](美)穆尔,高会生,刘童娜,李聪聪.MA TLAB实用教程(第二版) . 电子工业出版社,2010. [2]王正林,刘明.精通MATLAB(升级版) .电子工业出版社,2011. [3]陈杰. MA TLAB宝典(第3版) . 电子工业出版社,2011. [4]刘保柱,苏彦华,张宏林. MATLAB 7.0从入门到精通(修订版) . 人民邮电出版社,2010. 指导教师签名:年月日 系主任(或责任教师)签名:年月日
基于MATLAB的径向基网络源程序
%一维输入,一维输出,逼近效果很好! 1.基于聚类的RBF 网设计算法 SamNum = 100; % 总样本数 TestSamNum = 101; % 测试样本数 InDim = 1; % 样本输入维数 ClusterNum = 10; % 隐节点数,即聚类样本数 Overlap = 1.0; % 隐节点重叠系数 % 根据目标函数获得样本输入输出 rand('state',sum(100*clock)) NoiseVar = 0.1; Noise = NoiseVar*randn(1,SamNum); SamIn = 8*rand(1,SamNum)-4; SamOutNoNoise = 1.1*(1-SamIn+2*SamIn.^2).*exp(-SamIn.^2/2); SamOut = SamOutNoNoise + Noise; TestSamIn = -4:0.08:4; TestSamOut = 1.1*(1-TestSamIn+2*TestSamIn.^2).*exp(-TestSamIn.^2/2); figure hold on grid plot(SamIn,SamOut,'k+') plot(TestSamIn,TestSamOut,'k--') xlabel('Input x'); ylabel('Output y'); Centers = SamIn(:,1:ClusterNum); NumberInClusters = zeros(ClusterNum,1); % 各类中的样本数,初始化为零IndexInClusters = zeros(ClusterNum,SamNum); % 各类所含样本的索引号while 1, NumberInClusters = zeros(ClusterNum,1); % 各类中的样本数,初始化为零IndexInClusters = zeros(ClusterNum,SamNum); % 各类所含样本的索引号 % 按最小距离原则对所有样本进行分类 for i = 1:SamNum AllDistance = dist(Centers',SamIn(:,i)); [MinDist,Pos] = min(AllDistance); NumberInClusters(Pos) = NumberInClusters(Pos) + 1; IndexInClusters(Pos,NumberInClusters(Pos)) = i; end % 保存旧的聚类中心
控制测量实验报告
控制测量实习报告 姓名:邸凯 院系:资源工程学院 专业:测绘工程一班 学号:2011092549 实习地点:厦门海沧区 指导教师:高鹏 2014年12月
控制测量实习报告 2011092549 11资源测绘(1)班邸凯 一.实习单位:福建省地质测绘院厦门分院 二.实习项目:中共厦门市委党校迁建工程 三.项目概况:本项目位于厦门市海沧区天竺山西路,起算控制点引用厦门市测绘与基础地理信息中心提供的2006年布设的I级导线点,经检测其精度满足规范要求,可作为本项目起算控制点;坐标系为92厦门坐标系,高程系为1985国家高程基准。 四.实习时间:2014年12月 五.实习地点:厦门市海沧区天竺山西路71号 六.小组成员:苏景坤周三平廖旭辉邸凯王志斌七.技术指导:苏景坤 八.实习目的: 1.通过实习,熟悉并掌握控制网的布设方法及三、四等控制测量的作业程序及施测方法。 2.对野外观测成果的整理、检查和计算。掌握用测量平差理论处理控制测量成果的基本技能。 九.实习设备: 全站型电子速测仪,DS3型微倾式水准仪,塔尺,三脚架,盘尺,半圆仪,测钎,直尺等。
十.实习内容: 1. 平面控制网的建立。 2. 高程控制网的建立。 3. 控制网平差与精度计算。 十一.实习步骤: 1.高程控制网 1.1布设 1.1.1根据提供的高级控制点资料,到测区实地现场勘察。了解高级控制点标志的完好情况,核对地形图的准确性,初步考虑导线的布设形式。 1.1.2在本测区范围内,综合考虑测区内高级控制点的数量、分布及地形条件等情况,根据技术要求,确定导线布设形式及点的位置,用铅笔标于图上并编号。绘制出注有高级控制点和导线点点位的导线设计略图. 1.2四等水准测量: 1.1使用DS3水准仪水准测量: 1.1.1观测 (1)根据设计好的导线路线,结合实地情况布设水准路线,采用四等水准测量观测程序进行,使用双面尺法观测。 (2)在进行观测时,将仪器大致架设在两尺的中点处,每次中丝读数之前,按一下水准仪上的自动安平按钮,读出中丝和视距丝(上丝、下丝)读数。
Matlab课程设计报告
自控系统仿真软件课程设计报告 MATLAB 设计题目:牛顿摆球 姓名: 学号: 院系: 班级:1203 指导教师: 2014年12月20日
一.课程设计目的 1、熟悉课程设计的基本流程; 2、掌握MATLAB语法结构及调试方法; 3、熟悉MATLAB函数调用,熟练二维画图; 4、掌握MATLAB语言在控制方面的运用; 5、学会用MATLAB进行基本仿真; 6、掌握MATLAB编程技巧,提高编程水平。 二.系统分析 1.题目的描述: (1)牛顿摆球原理描述 五个质量相同的球体由吊绳固定,彼此紧密排列。当摆动最右侧的球并在回摆时碰撞紧密排列的另外四个球,最左边的球将被弹出,并仅有最左边的球被弹出。当然此过程也是可逆的,当摆动最左侧的球撞击其它球时,最右侧的球会被弹出。当最右侧的两个球同时摆动并撞击其他球时,最左侧的两个球会被弹出。同理相反方向同样可行,并适用于更多的球。 为了更接近现实,在这里我将考虑重力及空气阻力的影响,摆球将不会永无止境的运动下去,由于外界因素的影响,摆球运动一段时间后将回归静止状态。(2)通过MATLAB动画程序制作软件,实现下述过程 当运行程序时,把最右边的小球拉到一定的高度放下,让其碰撞其余四个小球,仅让最左边的小球被弹出,当最左边小球回摆碰撞其它球时,最右边小球又被弹出,如此循环。由于是非理想条件下,摆球的摆动幅度会随摆动次数的增加越来越小,直到静止。 时间停顿两秒,把右边两小球一起拉到一定高度放下,让其碰撞其余三个球,同样仅让左边两球被弹出,当球回摆再次碰撞时,最右边两球又被同时弹出,如此循环,因为外界因素的影响,最终五个球都会静止下来。 (3)整个实验看似简单,但要在MATLAB上完成这样一个动画过程,还是需要下点功夫,克服困难的。经过自己的努力,终于实现了整个过程,这也是一种不小的收获。 2.设计要求: (1)能够实现有阻尼摆动,即摆幅随摆动次数增加越来越小,直到静止。(2)能够让摆球弧线摆动。 三.系统设计 1.系统设计过程 (1)通过函数axis建立坐标系 (2)在坐标系范围内通过函数line画各个支架 (3)通过函数title添加标题“动量守恒实验”、函数text添加标注“牛顿摆球” (4)通过函数line画出五个球,并设定其初始位置,颜色,大小,线条的擦拭方式
基于Matlab的导线网坐标计算设计
基于Matlab的导线网坐标计算设计
东华理工大学长江学院毕业设计论文题目:基于Matlab的导线网坐标计算 English Title:Traverse Network Coordinate Calculation Based On Matlab 学生姓名: 申请学位门类:工学学士 专业:测绘工程 系别:测绘工程系
摘要 导线计算是在所有测量工作中经常遇见的问题之一,同时导线计算的方法也有很多种,本文主要是利用简单易懂的Matlab对附合导线、闭合导线和支导线进行相应的平差计算。文章首先介绍了附合导线、闭合导线、支导线基本概念和计算方法,其次利用Matlab计算机编程语言对三种导线的计算进行编程实现;最后通过实例验证,本文利用Matlab编写的程序正确,通过输入边长和角度,能够快速的得到各控制点的准确坐标。 关键词:Matlab;导线计算;精度评价;计算机编程
ABSTRACT Traverse calculated in all measurements often met one of the problems,Also there are many kinds of traverse the way.This article mainly is to use simple Matlab to connecting traverse、closed traverse、spur traverse to the corresponding adjustment calculation The article first introduces the connecting traverse、closed traverse、spur traverse is basic concept and calculation method.Secondly using Matlab computer programming language was realized by programming calculation of three traverse.At last,through example validation, In this paper, using the Matlab program, right through the input variable length and Angle, able to quickly get the accurate coordinates of each control point. Key words:Matlab; Traverse Calculated ; Precision Evaluation; Computer Programming
控制测量实验报告
一、实验目的与要求: 掌握水准仪的安置、整平、瞄准与读数和测定地面两点间的高差; 掌握全站仪对中、整平、瞄准与读数等基本操作要领; 掌握小地区碎部测量布点方式; 掌握测绘学的水准测量和导线测量的一般方法; 二、实验任务: 控制点高程测量;导线测量;水准、闭合导线内业计算; 学校莳英园水准闭合路线的测量,并根据其中一个已知高程的水准点推算出其它水准点的高程。每小组完成一个指定区域的导线测量(包括高程)。完成提交一份水准测量的成果表、一份水准测量的原始记录数据的电子表格、一份导线测量的布点图、一份导线测量的原始测量数据的记录表格。 三、实验内容: 1. 对莳英园的18个控制点采用闭合路线进行等外水准测量,并且闭合路线每条线路,及相应的内业处理 2.在莳英园为中心,包括9,10,11,12号楼,北门,西北门,草坪、亭台进碎步点的布设和将布设的碎步点采用导线测量的方式测量其坐标和高程,及相应的内业处理。 四、实验设备:水准仪,水准尺,三脚架,全站仪,棱镜,对中杆,卷尺,图纸等。, 五、技术设计: 1.水准测量:根据已知水准点的高程,测量其他水准点的高程. 使用水准仪和水准尺,在所选择的闭合回路上有若干个控制点(索要测出高程的点)。闭合回路上,每两个控制点之间为一测段,站与站间距离应适中,按照国家水准测量技术要求进行施测。 2.导线测量:通过测角和量距,求出各导线点的坐标 导线从一已知控制点出发,经过17个点,又回到起始点上,形成一闭合多边形,成为闭合导线。由于测量了多边形的各内角及边长,闭合导线也具有检核作用。 a角度检核条件:多边形各内角的观测值之和与其理论值之差,应满足限差要求,其中n为多边形角个数。 b坐标增量检核条件:上述理论值应为零,可实际上一般不等于零,但也应该满足限差要求。 c导线测量的外业工作:踏勘选点及建立标志,测角,量边等。 d导线测量内业计算:导线测量内业计算的目的就是计算各导线点的平面坐标x、y。计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错算错,成果是否符合精度要求,计算数据是否准确 3. 碎步测量:根据控制点,测定碎部点的平面位置和高程; 4. 绘图。
matlab课程设计拟定题目
第一类:单位转换 1.长度单位换算的设计与实现 2.面积单位换算的设计与实现 3.体积单位换算的设计与实现 4.容积单位换算的设计与实现 5.质量单位换算的设计与实现 6.时间单位换算的设计与实现 7.温度单位换算的设计与实现 7.压强单位换算的设计与实现 8.角度单位换算的设计与实现 8.功率单位换算的设计与实现 第二类:曲线绘制 1.直线的自动绘制和相关计算 2.椭圆的自动绘制和相关计算 3.双曲线的自动绘制和相关计算 4.抛物线的自动绘制和相关计算 5.心脏线的自动绘制和相关计算 6.渐开线的自动绘制和相关计算 7.滚圆线的自动绘制和相关计算 8.三叶玫瑰线的自动绘制和相关计算9.四叶玫瑰线的自动绘制和相关计 10.阿基米德螺线的自动绘制和相关计算第三类:曲面绘制 1.球面的自动绘制和相关计算 2.椭球面的自动绘制和相关计算 3.单叶双曲面的自动绘制和相关计算 4.双叶双曲面的自动绘制和相关计算 5.抛物面的自动绘制和相关计算 6.双曲抛物面的自动绘制和相关计算 7.双曲柱面的自动绘制和相关计算 8.椭圆柱面的自动绘制和相关计算 9.抛物柱面的自动绘制和相关计算 10.圆锥面的自动绘制和相关计算 第四类:线性回归 1.男士身高体重相关计算经验公式 2.女士身高体重相关计算经验公式 3.男士胖瘦等级的确定 4.女士胖瘦等级的确定 5.男士身高脚长相关计算经验公式 6.女士身高脚长相关计算经验公式 7.父子身高相关性研究 8.母子身高相关性研究 9.父女身高相关性研究 10.母女身高相关性研究 第五类:学习成绩 1.期末总评自动计算的设计与实现 2.成绩等级自动评定的设计与实现 3.成绩分段自动统计的设计与实现 4.成绩分布折线自动绘制的设计与实现 5.成绩自动统计分析的设计与实现 6.试卷分布自动分析的设计与实现 7.试卷难度自动分析的设计与实现 8.考试成绩名次自动生成的设计与实现
软件无线电实验matlab程序
附录 (1)、SDR低通采样理论 %parameters fs = 5e4;%采样频率注意fs至少是f的2倍或2倍以上 f = 5e3;%信号的频率 N = 1024; n = 1:1024; t= n/fs; deta_t = 1/fs;%采样间隔 %signals sn = sin(2*pi*f*t);%时域采样后的信号 w = hanning(N);%加汉宁窗 sn1 = sn.*w';%加窗减少频率泄露 Sn_fft = fft(sn1);%频域信号 Sn = abs(Sn_fft); %figures figure(1); plot(t,sn); title('s(n)的时域波形'); grid on; xlabel('t'); xlim([0 0.021]); ylabel('幅度'); figure(2); xax = [-N/2:N/2-1]/N*fs/1000;%将f轴单位变为kHz plot(xax,20*log10(fftshift(Sn))); title('s(n)的频域波形'); grid on; xlabel('f(kHz)'); ylabel('幅度(dB)'); ylim([-200 100]); (2)、SDR带通采样理论 %parameters f = 1.3e3;%基频 fo = 100e6;%载波频率 N = 1024; n = 1:1024; fs = 4e3;%采样频率 t= 0:0.001:2; st = cos(2*pi*(f+fo)*n/fs);%带通抽样信号St1 = fft(st); St = abs(St1); st0 = cos(2*pi*(f+fo)*t); St0 = fft(st0); St2 = abs(St0); figure(1); plot(n,st); title('带通抽样信号时域图像'); xlabel('n'); xlim([0 1026]); ylabel('幅度'); grid on; figure(2); plot(t,st0); title('带通原始信号时域图像'); xlabel('t'); ylabel('幅度'); grid on; figure(3); xax =[-N/2:N/2-1]/N*fs/1000; plot(xax,20*log10(fftshift(St))); title('带通信号抽样后频域图像'); xlabel('f(kHz)'); ylabel('幅度(dB)'); grid on; (3)、频率调制信号 %频率调制 %parameters fs = 1e3;%抽样频率 ts = 1/fs;%采样率 N = 1024; n = 0:1:N-1; t = n/fs; kf = 100.1; A = 100; Aw = 10;
原电池电动势的测定实验报告范本
Screen and evaluate the results within a certain period, analyze the deficiencies, learn from them and form Countermeasures. 姓名:___________________ 单位:___________________ 时间:___________________ 原电池电动势的测定实验报告
编号:FS-DY-34717 原电池电动势的测定实验报告 实验目的 1.掌握可逆电池电动势的测量原理和电位差计的操作技术 2.学会几种电极和盐桥的制备方法 3.学会测定原电池电动势并计算相关的电极电势 实验原理 凡是能使化学能转变为电能的装置都称之为电池(或原电池)。 可逆电池应满足如下条件: (1)电池反应可逆,亦即电池电极反应可逆;(2)电池中不允许存在任何不可逆的液接界;(3)电池必须在可逆的情况下工作,即充放电过程必须在平衡态下进行,即测量时通过电池的电流应为无限小。 因此在制备可逆电池、测定可逆电池的电动势时应符合
上述条件,在精确度不高的测量中,用正负离子迁移数比较接近的盐类构成“盐桥”来消除液接电位;用电位差计测量电动势可满足通过电池电流为无限小的条件。电位差计测定电动势的原理称为对消法,可使测定时流过电池的电流接近无限小,从而可以准确地测定电池的电动势。 可逆电池的电动势可看作正、负两个电极的电势之差。设正极电势为φ+,负极电势为φ-,则电池电动势 E = φ+ - φ- 。 电极电势的绝对值无法测定,手册上所列的电极电势均为相对电极电势,即以标准氢电极作为标准,规定其电极电势为零。将标准氢电极与待测电极组成电池,所测电池电动势就是待测电极的电极电势。由于氢电极使用不便,常用另外一些易制备、电极电势稳定的电极作为参比电极。常用的参比电极有甘汞电极、银-氯化银电极等。这些电极与标准氢电极比较而得的电势已精确测出,具体的电极电位可参考相关文献资料。 以饱和甘汞电极与铜/硫酸铜电极或锌/硫酸锌电极组成电池,测定电池的电动势,根据甘汞电极的电极电势,可推
matlab课程设计题目全
Matalab课后作业 学院:电气信息工程及其自动化 班级: 学号: 姓名: 完成日期: 2012年12月23日
1、 matlab 软件主要功能是什么?电气工程及其自动化专业本科生主要用到哪 些工具箱,各有什么功能? 答:(1)主要功能:工业研究与开发; 数学教学,特别是线性代数;数值分析和科学计算方面的教学与研究;电子学、控制理论和物理学等工程和科学学科方面的教学与研究; 经济学、化学和生物学等计算问题的所有其他领域中的教学与研究;符号计算功能;优化工具;数据分析和可视化功能;“活”笔记本功能;工具箱;非线性动态系统建模和仿真功能。 (2)常用工具箱: (a ) MATLAB 主工具箱:扩充matlab 的数值计算、符号运算功能、图形建模仿真功能、文字处理功能以及与硬件实时交互功能。 (b )符号数学工具箱:符号表达式、符号矩阵的创建;符号可变精度求解;因式分解、展开和简化;符号代数方程求解;符号微积分;符号微分方程。 (c ) SIMULINK 仿真工具箱: Simulink 是用于动态系统和嵌入式系统的多领域仿真和基于模型的设计工具。对各种时变系统,包括通讯、控制、信号处理、视频处理和图像处理系统,Simulink 提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。 (d )信号处理工具箱:数字和模拟滤波器设计、应用及仿真;谱分析和估计;FFT 、DCT 等 变换;参数化模型。 (e )控制系统工具箱:连续系统设计和离散系统设计;状态空间和传递函数以及模型转换;时域响应(脉冲响应、阶跃响应、斜坡响应);频域响应(Bode 图、Nyquist 图);根轨迹、极点配置。 2、设y=23e t 4-sin(43t+3 ),要求以0.01秒为间隔,求出y 的151个点,并求出其导数的值和曲线。 程序如下: clc clear x=0:0.01:1.5; y=sqrt(3)/2*exp(-4*x).*sin(4*sqrt(3)*x+pi/3); y1=diff(y); subplot(2,1,1) plot(x,y) subplot(2,1,2) plot(x(1:150),y1) 曲线如下图所示:
实验三-利用matlab程序设计语言完成某工程导线网平差计算
实验三利用matlab程序设计语言完成某工 程导线网平差计算 实验数据; 某工程项目按城市测量规范(CJJ8-99)不设一个二级导线网作为首级平面控制网,主要技术要求为:平均边长200cm,测角中误差±8,导线全长相对闭合差<1/10000,最弱点的点位中误差不得大于5cm,经过测量得到观测数据,设角度为等精度观测值、测角中误差为m=±8秒,鞭长光电测距、测距中误差为m=±0.8√smm,根据所学的‘误差理论与测量平差基础’提出一个最佳的平差方案,利用matlab完成该网的严密平差级精度评定计算; 平差程序设计思路: 1采用间接平差方法,12个点的坐标的平差值作为参数.利用matlab进行坐标反算,求出已知坐标方位角;根据已知图形各观测方向方位角; 2计算各待定点的近似坐标,然后反算出近似方位角,近似边.计算各边坐标方位角改正数系数; 3确定角和边的权,角度权Pj=1;边长权Ps=100/S; 4计算角度和边长的误差方程系数和常数项,列出误差方程系数矩阵B,算出Nbb=B’PB,W=B’Pl,参数改正数x=inv(Nbb)*W;角
度和边长改正数V=Bx-l; 6 建立法方程和解算x,计算坐标平差值, 精度计算;程序代码以及说明: s10=238.619;s20=170.759; s30=217.869;s40=318.173; s50=245.635;s60=215.514; s70=273.829;s80=241.560; s90=224.996;s100=261.826; s110=279.840;s120=346.443; s130=312.109;s140=197.637; %已知点间距离 Xa=5256.953;Ya=4520.068; Xb=5163.752;Yb=4281.277; Xc=3659.371;Yc=3621.210; Xd=4119.879;Yd=3891.607; Xe=4581.150;Ye=5345.292; Xf=4851.554;Yf=5316.953; %已知点坐标值 a0=atand((Yb-Ya)/(Xb-Xa))+180; d0=atand((Yd-Yc)/(Xd-Xc)); f0=atand((Yf-Ye)/(Xf-Xe))+360; %坐标反算方位角a1=a0+(163+45/60+4/3600)-180 a2=a1+(64+58/60+37/3600)-180; a3=a2+(250+18/60+11/3600)-180;
原电池电动势的测定实验报告
( 实验报告) 姓名:____________________ 单位:____________________ 日期:____________________ 编号:YB-BH-053983 原电池电动势的测定实验报告Experimental report on measurement of electromotive force of
原电池电动势的测定实验报告 原电池电动势的测定实验报告1 实验目的 1.掌握可逆电池电动势的测量原理和电位差计的操作技术 2.学会几种电极和盐桥的制备方法 3.学会测定原电池电动势并计算相关的电极电势 实验原理 凡是能使化学能转变为电能的装置都称之为电池(或原电池)。 可逆电池应满足如下条件: (1)电池反应可逆,亦即电池电极反应可逆;(2)电池中不允许存在任何不可逆的液接界;(3)电池必须在可逆的情况下工作,即充放电过程必须在平衡态下进行,即测量时通过电池的电流应为无限小。 因此在制备可逆电池、测定可逆电池的电动势时应符合上述条件,在精确度不高的测量中,用正负离子迁移数比较接近的盐类构成“盐桥”来消除液接电位;用电位差计测量电动势可满足通过电池电流为无限小的条件。电位差计测定电动势的原理称为对消法,可使测定时流过电池的电流接近无限小,从而可以准确地测定电池的电动势。
可逆电池的电动势可看作正、负两个电极的电势之差。设正极电势为φ+,负极电势为φ-,则电池电动势E = φ+ - φ- 。 电极电势的绝对值无法测定,手册上所列的电极电势均为相对电极电势,即以标准氢电极作为标准,规定其电极电势为零。将标准氢电极与待测电极组成电池,所测电池电动势就是待测电极的电极电势。由于氢电极使用不便,常用另外一些易制备、电极电势稳定的电极作为参比电极。常用的参比电极有甘汞电极、银-氯化银电极等。这些电极与标准氢电极比较而得的电势已精确测出,具体的电极电位可参考相关文献资料。 以饱和甘汞电极与铜/硫酸铜电极或锌/硫酸锌电极组成电池,测定电池的电动势,根据甘汞电极的电极电势,可推得这两个电极的电极电势。 仪器和试剂 SDC-II型数字式电子电位差计,铜电极,锌电极,饱和甘汞电极,0.1 mol?L-1 CuSO4 溶液,0.1 mol?L-1 ZnSO4 溶液,饱和KCl 溶液。 实验步骤 1. 记录室温,打开SDC-II型数字式电子电位差计预热5 分钟。将测定旋钮旋到“内标”档,用1.00000 V电压进行“采零”。 2. 电极制备:先把锌片和铜片用抛光砂纸轻轻擦亮,去掉氧化层,然后用水、蒸馏水洗净,制成极片。 3. 半电池的制作:向两个50 mL 烧杯中分别加入1/2 杯深0.1000 mol?L-1 CuSO4 溶液和0.1000 mol?L-1 ZnSO4 溶液,再电极插入电极管,打开夹在乳胶管上的弹簧夹,将电极管的尖嘴插入溶液中,用洗耳球从乳胶管处吸气,使溶液从弯管流出电极管,待电极一半浸没于溶液中时,用弹簧夹将胶管
Matlab绘制频散曲线程序代码(20210119130722)
Matlab绘制频散曲线 程序代码 -CAL-FENGHAI-(2020YEAR-YI function disper %绘制平板频散曲线 %tic
clc;clear; cl=5790;%材料纵波波速(钢板) cs=3200;%材料横波波速(钢板) dfd=*le3; fdO=:dfd/le3:2O)*le3;%频厚积(MHz*mm) d_Q235二6; cps_mi n二2700; cpa_min=100; cp_max=10000; mode=3;%绘制的模式数 precision=le-8; cpa=zeros(length(fdO),mode); cps=zeros(le ng th(fdO),mode); for i=l:length(fdO) fd=fdO(i); [cpl2 n]=ss(cps_min/cp_max/fd/cl,cs,mode); for j=l:n cpl=cpl2(j,l); cp2=cpl2(j,2); cps(i,j)=serfe n(cpl,cp2,fctcl£S'precisi on); end [cpl2 n]=aa(cpa_min,cp_max/fd/cl/cs,mode); for j=l:n cpl=cpl2(j,l); cp2=cpl2(j,2); cpa(ij)=aerfe n(cpbcp2,fd£l‘cs,precisi on); end end h=zeros(mode,2); %相速度 figure(l) for j=l:2 ifj==l cp=cps; color=,b,; else cp=cpa; color二T; end for i=l:mode cpp=cp(:,i); in d=fi nd(cpp==0); if ^isempty(ind) h(i/j)=plot((fdO(ind(end)+l:end))/d_Q235/cpp(ind(end)+l:end),color); else h(i/j)=plot(fdO/d_Q235,cpp/color); end hold on end ifj==2 xlabel('f/(KHz)') ylabel('C_{p}/(km-sA{-l})')
四等导线测量实习报告
导线测量实习报告
目录 一概述 (3) 二主要任务 (3) 三测量内容 (4) 四心得体会 (6)
一概述: 1.1一、导线测量概述 导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并 测量各线段的边长和转折角, 再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制 点的测量。 导线的布设形式:附合导线、闭合导线、支导线,导线网。 1.2测量特点 导线测量布设灵活,推进迅速,受地形限制小,边长精度分布均匀。 如在平坦隐蔽、交通不便、气候恶劣地区,采用导线测量法布设大地控制 网是有利的。但导线测量控制面积小、检核条件少,方位传算误差大。 按国家大地网的精度要求实施的导线测量,称为精密导线测量,其导线应闭合成环或布设在高级控制点之间以增加检核条件。导线上每隔 一定距离测定天文经纬度和方位角,以控制方位误差。 电磁波测距仪出现后,导线测量受到重视。电磁波测距仪测定距离,作业迅速,精度随仪器的改进而越来越高,电磁波导线测量得到广泛应用。 闭合导线:从高等控制点出发,最后仍回到这个高等控制点形成一个闭合多边形。 附合导线:从高等控制点开始测到另一个高等控制点。
二:主要任务 为了让同学们知道四等导线测量怎么做,是怎么个回事,也为了锻炼同学们的对中整平,怎么样来测量,是一直对着掕镜中心?还是其他的?还有就是为了让同学知道怎么记录计算,怎么样知道那个测出来的是不是合格。怎么样用三联脚架法来测量导线。 整个测区俯视图如下 1.测量的路线为附和导线测量; 2.对测出的数据加以计算,学会导线测量的内业计算; 3.配合本组其他成员完成导线测量;体会导线测量的全过程,加以总结; 4对测量成果进行检验,准确无误后填写如成果表中,让老师对测量成果 验收; 5.利用已经算出的坐标进行建筑方格网的放样;
matlab在电路中的全响应程序
A=[1 0 0 1 1 0;0 0 1 0 -1 1;0 1 0 -1 0 -1] %输入相关矩阵A Is=[2;0;-5;0;0;0] %输入电流源列向量 Us=[0;3;0;-2;0;0] %输入电压源列向量 Y=[1 0 0 0 0 0 ;-2 1/3 0 0 0 0 ;0 0 1/4 0 0 0;0 0 0 1/5 0 1/3 ;0 0 0 0 1/2 0;0 0 0 0 0 1/8] %输入导纳矩阵Y Z=inv(Y)%求解阻抗矩阵Z Yn=A*Y*A' %求解节点导纳矩阵Yn Un=inv(Yn)*(A*Is-A*Y*Us) %求解节点电压Un U=A'*Un %求解之路电压U I=Y*(U+Us)-Is %求解支路电流I 结果如下: Z = 1.0000 0 0 0 0 0 6.0000 3.0000 0 0 0 0 0 0 4.0000 0 0 0 0 0 0 5.0000 0 -13.3333 0 0 0 0 2.0000 0 0 0 0 0 0 8.0000 Yn = 1.7000 -0.1667 -0.5333 -0.5000 0.8750 -0.1250 -2.2000 -0.4583 0.9917 Un = -7.8339 -13.7855 -25.1626 U = -7.8339 -25.1626 -13.7855 17.3287 5.9516 11.3772 I = -9.8339 8.2803 1.5536 6.8581 2.9758 1.4221
A=input('相关矩阵A=:') Is=input('电流源Is= :') Us=input('电压源Us=:' ) display ('是否含有受控源?是(a=1)否(a=0)') a=input('输入a=:' ) if(a==0) %判断语句 Z=input('阻抗矩阵Z=:') Y=inv(Z) %求解导纳矩阵Y else (a==1) Y=input('导纳矩阵Y=:') Z=inv(Y) %求解阻抗矩阵Z end Yn=A*Y*A' %求解节点导纳矩阵Yn Un=inv(Yn)*(A*Is-A*Y*Us) %求解节点电压Un U=A'*Un %求解之路电压U I=Y*(U+Us)-Is %求解支路电流I 含受控源的运行结果如下 相关矩阵A=:[1 0 0 1 1 0;0 0 1 0 -1 1;0 1 0 -1 0 -1] 电流源Is= :[2;0;-5;0;0;0] 电压源Us=:[0;3;0;-2;0;0] 是否含有受控源?是(a=1)否(a=0) 输入a=:1 导纳矩阵Y=:[1 0 0 0 0 0 ;-2 1/3 0 0 0 0 ;0 0 1/4 0 0 0;0 0 0 1/5 0 1/3;0 0 0 0 1/2 0;0 0 0 0 0 1/8] Z = 1.0000 0 0 0 0 0 6.0000 3.0000 0 0 0 0 0 0 4.0000 0 0 0 0 0 0 5.0000 0 -13.3333 0 0 0 0 2.0000 0 0 0 0 0 0 8.0000 Yn = 1.7000 -0.1667 -0.5333 -0.5000 0.8750 -0.1250 -2.2000 -0.4583 0.9917 Un = -7.8339 -13.7855 -25.1626 U = -7.8339 -25.1626 -13.7855