模态综合方法
第十章模态综合方法
§10.1 模态综合法的基本原理
【为什么要使用模态综合法】
★复杂结构自由度多,方程阶数高,计算成本大。
★对整个结构用假设模态法分析难以实现。
★大型复杂结构其主要部件可能在不同地区生产,由于条件限制,只能进行部件模态试验,无法进行整体结构的模态试验。
★结构的响应只由低阶模态控制,不必为少数低阶模态去求解整个结构的高阶动力学方程。
【解决途径】
仿照有限元方法,先对各个局部子结构进行分析,然后再通过某种方法进行整体分析,具体讲就是对各子结构进行模态分析,按某种原则得到能恰当描述整个结构振动的“假设模态”,再按假设模态分析方法来求解整个结构的振动。
【模态综合法的基本思想】
★按复杂结构的特点将其划分为若干子结构
★对各子结构进行离散化,通过动力学分析或试验,得到子结构的分支模态。★对各子结构的物理坐标——结点位移坐标进行模态坐标变换
★对子结构进行“组集”,获得整个结构的模态坐标
★通过子结构的界面连接条件,作第二次坐标变换—独立坐标变换,消去不独
立的模态坐标,得到一组用独立的各子结构模态坐标组成的描述整个结构运动的独立广义坐标,从而导出整个系统以独立模态坐标表示的动力学方程。
【模态综合法的实质】
采用子结构技术,来获得一组复杂结构的品质优良的“假设模态”,以此假设模态作为李兹基底所张成的模态空间,可以很好地覆盖住系统真实的低阶模态空间。
模态综合方法是子结构方法中最成熟、应用最普遍的方法。
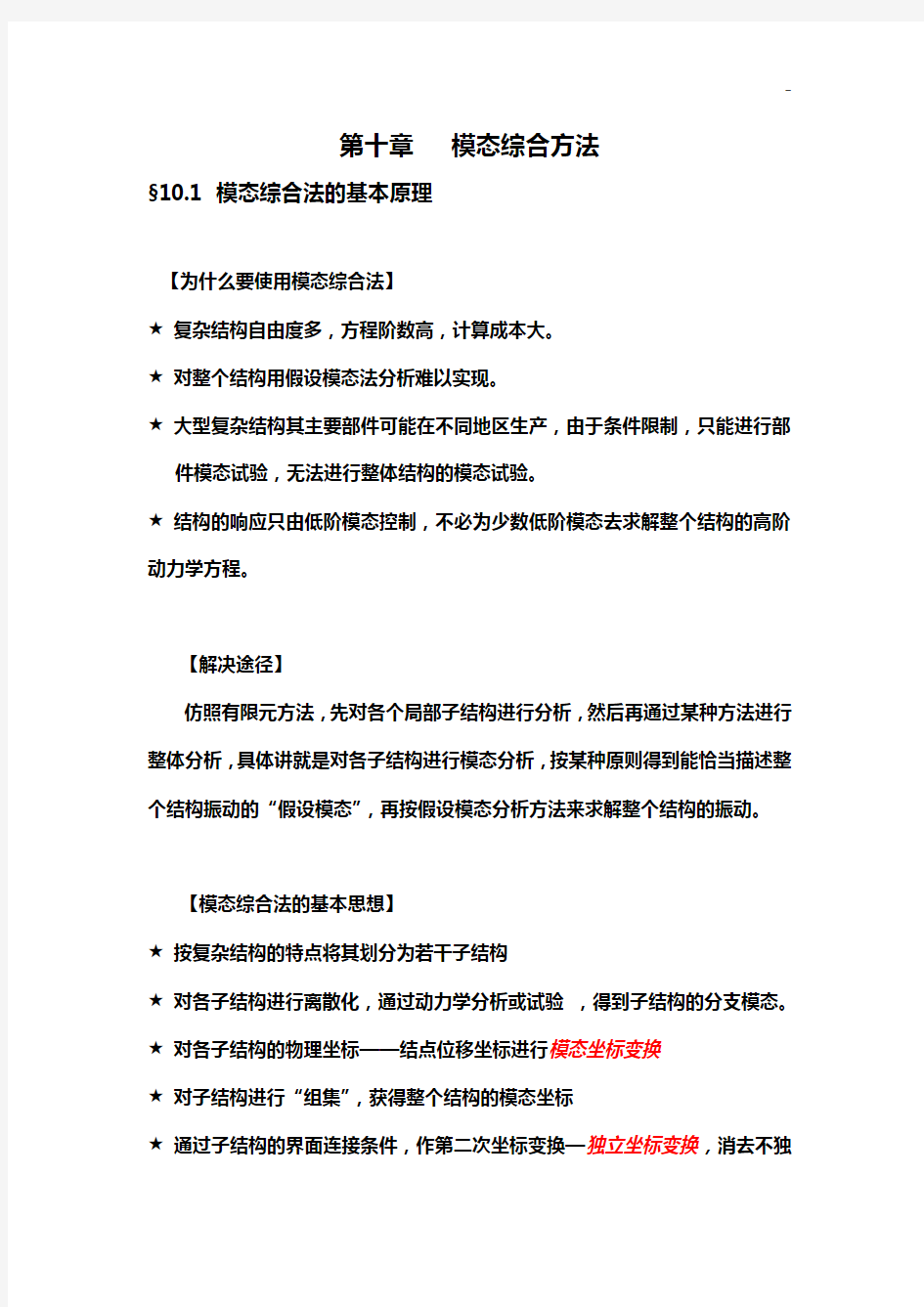
【例】 以两端固支梁分成两个子结构为例,来简要说明模态综合法的基本原理 将图示的梁结构分成两个子结构α、β,
界面坐标集}{j u ,即
??????????=ααα
j i u u u }{ ??
??????
?
?=ββ
βj i u u u }{ (10-1 界面位移连续条件:
}{}{β
αj j u u = (10-2)
结构动能
}]{[}{2
1}]{[}{21ββ
βαααβαu m u u m u T T T T T +=+= (10-3) 结构势能
}]{[}{2
1
}]{[}{21βββαααβαu k u u k u V V V T T +=+= (10-4)
假定已经选出了各子结构合适的模态矩阵][][βαφφ(下面各节中就专门讨论][][βαφφ的求法),则有
}{αu β} {
}]{[}{}]{[}{βββαααφφp u p u == (10-5)
通常,][],[βαφφ的个数远少于对应子结构的自由度数。 记:
?
??
???=?
?????=?
?
????=][0
0][][][00][][}{βαβαβαK K K M M M p p p (10-6) ]][[][][]][[][][β
βββαααα????m M m M T T == (10-7)
]
][[][][]][[][][β
β
ββ
αααα????k K k K T
T == (10-8)
从而,
}]{[}{21p M p T T = }]{[}{2
1
p K p V T = (10-9) 当应用拉格朗日方程来建立振动方程时,由于拉格朗日方程要求各i p 相互独立,而}{p 中有不独立的坐标。
{}
{}
β
ββ
ββααα
ααφφφφp u u p u u j i j i j i j i ???
?????=?????????????
?????=?????????? (10-10) 由对接位移条件(界面位移连续条件):
}{}{βαj j u u =,有}]{[}]{[β
βααφφp p j j = (10-11)
写成约束方程的形式:
]][][[][0}]{[β
αφφj j C p C -== (10-12)
下面进行第二次坐标变换 将}{p 分块写成
?
?????=I d p p p }{
(10-13)
则
}0{]][][[=?
??
???I d dI dd p p C C (10-14)
}]{[][}{1I dI dd d p C C p --= (10-15)
}]{[}{][][][}{1q S p I C C p I dI dd =??????-=- (10-16)
??
?
???-=-][][][][1I C C S dI dd (10-17)
][S 称为独立坐标变换矩阵。
从而
}]{[}{21
}]{[}{21q K q V q M q T T T == (10-18) ]][[][][]][[][][S K S K S M S M T T == (10-19)
由拉格朗日方程可得整个梁结构通过模态综合后的自由振动方程为:
}0{}]{[}]{[=+q K q
M (10-20) 相应的广义特征值问题为:
}0{}]){[]([2=-ψωM K (10-21)
其阶数为所有子结构分支模态总数减去界面对接坐标数。对其进行求解,就可以得到整个梁结构的动力学特性。
对于一般动力学方程,也可以进行上述的变换过程,得到缩减了自由度的动力学方程:
)}({}]{[}]{[}]{[t F q K q C q
M =++ (10-22) 其中:
C
C T
=(10-23)
]
[S
S
]
][
[
]
[
P
{t
S
=(10-24)
(
F T
t
(
)}
{
)}
]
[
在模态综合法中,为了描述结构在空间的运动和变形状态,采用两类广义坐标来描述,分别为“物理(几何)坐标”和“模态坐标”,物理坐标描述结构各节点的几何坐标位置,而模态坐标则表示物理坐标响应中各个模态成份大小的量。
对于模态综合法中的“模态”一词,它比“振型”具有更加广义的内涵,它不仅指结构做主振动时的振型,而且还包括了结构在一些特定的外力或者结点位移作用下产生的静变形形态,这些静变形形态被认为是在整个结构振动时,各子结构可能产生的变形形态。而“振型”则是一个狭义的概念,表示结构作主振动时的变形形式。
【模态综合法的基本步骤】
由上例可以看到,模态综合法的基本步骤可以分成如下六个步骤:(1)按结构特点划分子结构
(2)计算并选择分支模态进行第一次模态坐标变换
(3)在全部模态坐标中,选择不独立的广义坐标
(4)由位移对接条件,形成广义坐标的约束方程,得到独立坐标变换阵][S (5)对组集得到的质量矩阵、刚度矩阵进行合同变换,得到独立坐标下的质量矩阵,刚度矩阵,形成整个系统的振动方程
(6)根据坐标变换关系,再现子结构物理参数
由上可知,模态综合法的关键技术是如何选择子结构的分支模态。
§10.2 各种形式的分支模态
如前所述,分支模态就是在结构系统振动时,其子结构(分支结构)可能出现的变形形态。在模态综合法中,分支结构分为两类:受约束分支结构、有刚体运动的分支结构。有刚体运动的分支结构又称为自由悬浮分支。
一、受约束子结构的分支模态
它的可能变形形态包括:
在各种附加约束或无附加约束下自由振动模态,在各种外力作用下的位移形态,在各种给定的边界条件下的内部位移形态。
在进行模态综合时,只需要选其中一部分构成其分支模态,且各有其相应的名称。 【主模态】
分支主模态由下列子结构的特征方程决定:
}0{}]){?[]?([2=-a a a m k
φω (10-25) 在确定分支主模态时,需要首先确定子结构的界面坐标处理状态,按照对界面位移的处理方法,有三种分支主模态
固定界面主模态:子结构的全部界面加上附加约束
自由界面主模态:子结构的全部界面都没有附加约束,但子结构本身原有的
约束(称为自然约束)仍然存在
混合界面主模态:子结构的部分界面加上附加约束 在模态综合法中,假定主模态阵都已按质量归一化。即:
][]][?[][nn a n a T a n I m
=φφ (10-26) ][]][?[][2ωφφdiag k a n
a T a n = (10-27) 如果模态综合法所使用的不是子结构的完全主模态矩阵,而是保留主模态集,即经过高阶模态截断后的部分低阶主模态,模态综合法的误差就由此而产生。 【约束模态】
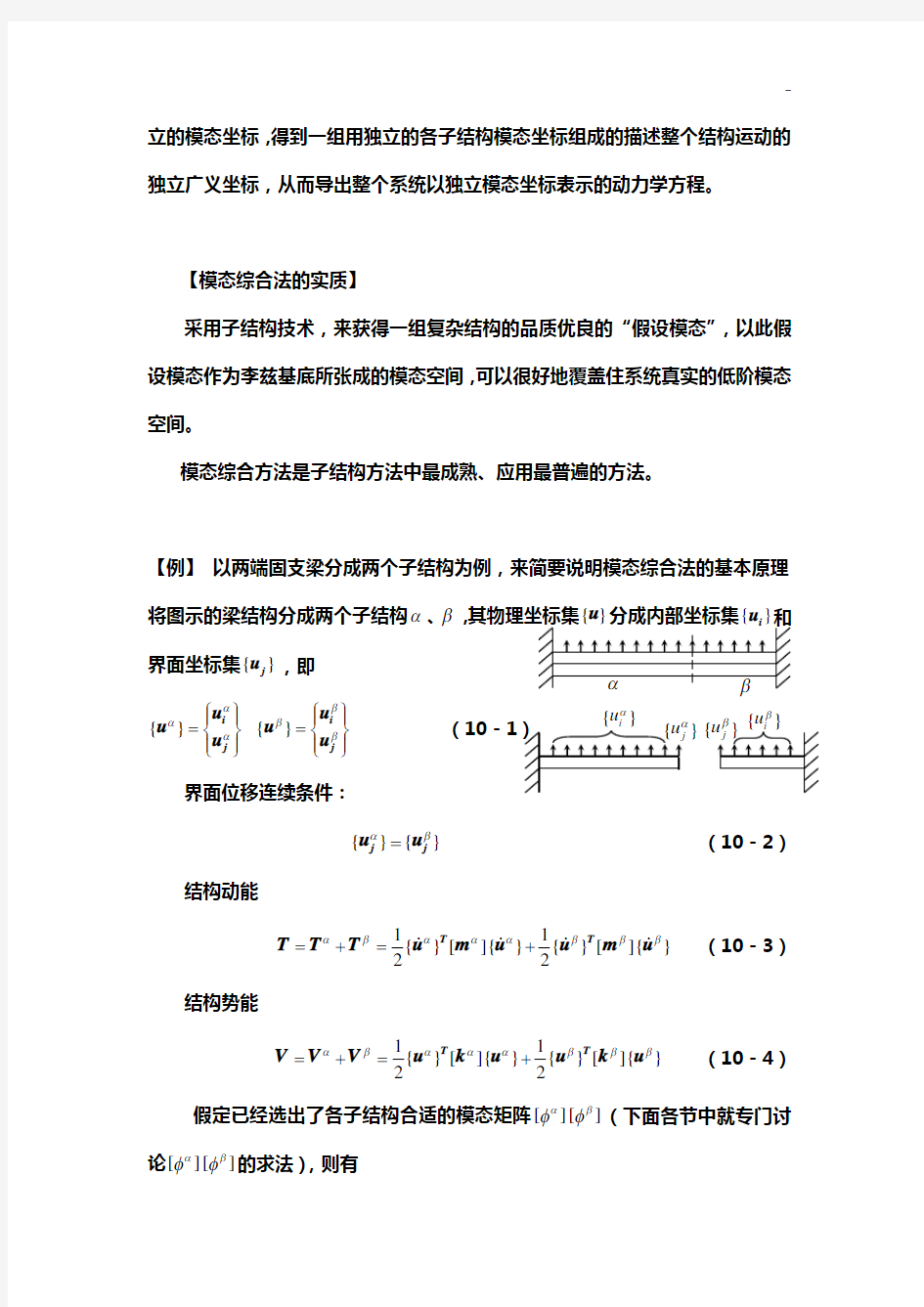
约束模态是指对界面坐标的约束模态,它定义为: 在子结构的全部界面自由度上引入附 加约束,然后让这些界面自由度依次产生 单位位移,其它约束(包括自然约束和附 加约束)则保持不变(即这些界面坐标都 强制为零)。由此产生的一系列子结构静 变形位移,称为子结构对于界面坐标的约
束模态,简称约束模态。约束模态的数目,等于界面自由度的数目,全部约束模态就组成子结构的约束模态阵][c ψ,从约束模态的生成过程看到,它有点类似于有限元法中的形函数。
显然,约束模态可以写成:
??
????=ψ][][][cc vc c I ψ (10-28) 下标v 表示子结构不受约束的自由度,c 表示附加约束的自由度,][cc I 为单位阵,表示界面坐标依次产生单位位移。][vc ψ为子结构内部坐标由于界面坐标依次有单位位移时所产生的静态位移。要让界面坐标依次产生单位位移,必须对界面坐标施加一定的界面力,记界面力矩阵为][cc R ,则应有:
α β
α
β
自由界面
固定界面
??
?
???=????????????][]0[][][][][cc vc cc vc cc cv vc vv R I k k k k ψ (10-29)
分块展开第一行有:
][][][1vc vv vc k k --=ψ (10-30)
从而约束模态为:
??
?
???-=??????=ψ-][][][][][][1cc vc vv cc vc c I k k I ψ (10-31) 如图所示为悬臂梁的约束模态示意图。
【附着模态】
模态综合法中的附着模态是对界面坐标的附着模态。定义为:对子结构的界面不附加任何约束,而是在一个界面自由度上沿此自由度方向施加单位力,而其它自由度上无外力作用,由此得到的子结构静态位移向量,就是子结构对该界面自由度的附着模态。显然这个定义只适合于受约束子结构。
依次在每个界面自由度上作用单位力,就可以得到一系列静态位移,也就构成子结构对其界面坐标的附着模态矩阵][a ψ。
根据附着模态的定义,附着模态矩阵][a ψ由下式来确定:
??
?
???=????????????][]0[][][][][][][aa wa aa wa aa aw wa ww I k k k k ψψ (10-32)
j v
0=j θ
0=j
1=j
1=j
从而有:
??
????=??????=??????-][]0[][][]0[][][][1aa wa aa wa aa wa I G I K ψψ (10-33)
子结构的柔度矩阵为:
??????==-][][][][][][1aa aw
wa ww g g g g K G (10-34) 所以有:
???
?????????=??????][]0[][][][][][][aa wa aa aw
wa ww aa wa I g g g g ψψ (10-35)
从而附着模态为:
??
?
???=??????=ψ][][][][][aa wa aa wa a g g ψψ (10-36)
【剩余附着模态】
在假设模态法建立系统的运动方程,求解其特征值问题时,要求所用到的假设模态应该是线性无关的,但是如果用子结构的主模态和附着模态作为假设模态集,会出现主模态与附着模态线性相关的问题。
另一方面,在使用子结构的主模态组成模态综合时的假设模态集,采用的是经过高阶截断的主模态。显而易见,如果在假设模态集中加入高阶主模态的信息,则可以提高模态综合的精度。
j v
0=vj P
1=j M θ 0=j θ 1=vj
前面提到,附着模态与保留主模态线性相关。如果从附着模态中减去与之不独立的低阶保留主模态,则可以得到高阶主模态的近似表达。这种模态称为“剩余附着模态”
设受约束子结构的全部归一化主模态为
[]??
?
???==Φ][][][][][j i d k φφφφ (10-37)
其中,][k φ为低阶主模态,即保留主模态,][d φ为高阶主模态,即剩余主模态。下标j i ,分别表示内部自由度和界面自由度。显然有
][]][[][2ωdiag K T =ΦΦ (10-38)
子结构柔度矩阵为:
T
d d
d T
k k
k T
diag diag diag K G ]
[])[]([][])[]([][])[]([][][1
21
2121φωφφωφω----+=ΦΦ== (10-39)
定义剩余柔度矩阵:
T d d d T k k k d diag diag G G ]])[[]([]])[[]([][][2
2φωφφωφ=-= (10-40)
仿照(10-32)的定义,将][G 换成][d G ,得到剩余附着模态阵的定义式为:
??
????=][]0[][][jj ij d d I G ψ (10-41) 下面讨论一下受约束子结构剩余附着模态的物理意义。 由定义:
??
????=??????=-][]0[][])[]([][]0[][][12ij ij T d
d d ij ij d d I diag I G φωφψ (10-42) 而
[
]
T jd ij ij T
jd T id ij ij T
d I I ][][]0[][][][]0[][φφφφ=?
?
????=?
?
?
??? (10-43) 由此,剩余附加约束模态可以写成:
)][])[((][][])[]([][1
212T jd d d T jd d d d diag diag φωφφωφ--?==ψ (10-44)
显然,][d ψ与][d φ线性相关。也就是说,剩余附着模态实际是进行主模态截断时,略去的高阶模态的一种线性组合。因此用剩余附着模态作为子结构分支模态集的一个子集,是对保留主模态集的一个合理补集。
由于][d φ与保留主模态][k φ具有正交性,因而剩余附着模态的][d ψ与][k φ也是关于质量阵正交的。即:
]0[]][[][=d T k M ψφ (10-45)
二.有刚体运动子结构的分支模态
对于有刚体运动的子结构,其模态集中包含有全部的刚体模态,由此可知,得到的有刚体运动子结构的刚度矩阵是奇异的。 【主模态】
有刚体运动子结构的主模态的定义与受约束子结构的主模态定义相同,只是还应包括相应与刚体自由度的刚体模态。但是对于固定界面和混合界面的分支主模态中,如果附加界面约束消除了刚体自由度,则这时的分支主模态集中将没有刚体模态。 【约束模态】
有刚体运动子结构的约束模态的定义与受约束子结构的约束模态定义相同,但是,只有在附加界面约束全部约束了子结构的全部运动时,才能求出约束模态。
??
?
???-=-][][][][1cc vc vv c I k k ψ
(10-46)
【刚体模态】
对受不完全约束的子结构,即有刚体自由度的子结构,描述其无变形运动位
移的模态称为刚体模态。对于空间自由悬浮结构,最多只有六个刚体模态坐标,因此刚体模态数r 满足60≤≤r 。对于有刚体位移的子结构,其刚体模态是十分重要的,其分支模态集中必须包含这些刚体模态。刚体模态可以通过求解自由界面子结构主模态的特征方程得到。也可以作为子结构约束模态的一种特殊情况求出,即当附加界面约束刚好约束住结构的全部刚体自由度时,这是求出的约束模
态,就是有刚体运动自由度的子结构的刚体模态][r ψ。
??
?
???-=?
?????=-][][][][][][1rr vr vv rr vr r I k k I ψψ (10-47) 当界面附加约束超过了子结构的刚体自由度时,约束模态就是弹性位移和全部刚体位移的线性组合。即这时的约束模态实际上包含了刚体模态。
显然系统有一个刚体模态,其刚度矩阵为:
??
??
?
?????----=110121011][k K 故?
??
???--=-===1112][]01[][][][k k k k k k k cc T cv vc vv 取约束坐标集][32
u u C =,由方程(10-30)得到:
?
???
?
?????=??????-=??????=-100101][][][][][][1
cc vc vv cc vc c I k k I ψψ
如果取界面坐标集为:)(3u C =,此时约束模态数和刚体模态数相等,约束模态退化为刚体模态。即
T c ]111[][=ψ
【附着模态】
对有刚体运动的子结构,应该在子结构中引入适当的附加静定约束,并刚好能约束住子结构的刚体运动,然后才能求其附着模态。将有刚体运动子结构的物理坐标分为三个子集,即W A R U ++=。R 为附加约束坐标集,它刚好约束住子结构的刚体位移,R C A -=,C 为界面坐标集,W 为内部坐标集。根据附着模态的定义,在A 集中的物理坐标上依次作用单位力,得到子结构的位移就是附着模态。
??
??
?
?????=????????????????????][][]0[]0[][][][][][][][][][][][ra aa wa ra aa wa rr ra rw ar aa aw wr wa ww R I k k k k k k k k k ψψ (10-48)
][ra R 是在附加约束坐标集R 中产生的附加约束反力。将(10-48)分块展
开,得到:
??
?
???=????????????][]0[][][][][][][aa wa aa wa aa aw wa ww I k k k k ψψ (10-49)
令
???
???=??????-][][][][][][][][1
aa aw
wa ww aa aw wa ww g g g g k k k k (10-50) 则
??
?
???=????????????=??????][][][]0[][][][][][][aa wa aa wa aa aw wa ww aa wa g g I g g g g ψψ (10-51)
从而有刚体自由度子结构的附着模态为:
????
?
?????=??????????=]0[][][]0[][][][ra aa wa ra aa wa a g g ψψψ (10-52) 图中β子结构是一个有刚体自由度的子结构,引入附加约束后,可以求出其附着模态,如图所示
【惯性释放附着模态】
如前面所述,我们看到,对有刚体自由度子结构,引入附加静定约束后,在界面坐标方向施加单位作用力,得到附着模态。
而惯性释放附着模态是在释放这些附加约束后,在界面单位力作用下求得的附着模态。但这时子结构会产生刚体位移,因此我们将一组相应的惯性力作用在子结构上,这些惯性力与界面力组成一个自平衡力系。惯性释放附着模态就是该平衡力系下,子结构的不包含刚体模态的附着模态。
在界面作用力作用下,子结构的位移矢量)}({t u 是刚体位移分量)}({t u r 和变形位移分量)}({t u E 之和。即
)}({)}({)}({t u t u t u E r += (10-53)
代入子结构运动方程
}{}]{[}]{[F u K u
M =+ (10-54) 由于0)}(]{[=t u K r ,故得到:
j M θ=j v P β子结构
α
β
}{}]{[}{}]{[}]{[E r E E F u M F u K u
M =-=+ (10-55) }{E F 就是上面所说的由界面力与惯性力组成的自平衡力系。
假定已经求出了子结构的主模态
]][][[][E r φφΦ= (10-56)
][r φ与][E φ分别为子结构的刚体模态矩阵和完全弹性变形模态矩阵。那么有:
)}
(]{[)}({)}(]{[)}({t q t u t q t u E E E r r r φφ== (10-57)
于是,
?
?????=+=)()(]][][[)}({)}({)}({t q t q t u t u t u E r E r E r φφ (10-58)
对方程(10-55)作坐标变换,并注意到][r φ与][E φ的正交性,得到:
}{][}]{[F q
m T r r r φ= (10-59) }{][}]{[}]{[F q k q
m T E E E E E φ=+ (10-60) 其中,
]
][[][][]][[][][]][[][][E T
E E E T E E r T r r K K M m M m φφφφφφ=== (10-61)
由(10-59)得到:
}{][][}{1F m q
T r r r φ-= (10-62) 所以
}{][]][[}{1F m u
T r r r r φφ-= (10-63) 1{}{}[]{}([][][][][]){}[]{}T E r r r r F F M u I M m F R F φφ-=-=-= (10-64)
T r r r m M I R ][]][][[][][1φφ--= (10-65)
显然,用][R 矩阵对界面力矩阵进行线性变换,就可以得到子结构在界面力和惯性力组成的自平衡力系。如果主模态已经对质量阵归一化,则
T r r M I R ]][][[][][φφ-= (10-66)
自平衡力系作用下的附着模态}~{a
?由下列方程确定: ]][[][}~]{[F R F K E
==α? (10-67) 上式中,
????
?
?????=]0[][]0[][ra aa wa I F (10-68) 为界面作用力矩阵。 从而,
????
??????=????????????????????]0[][]0[][]~[]~[]~[][][][][][][][][][ra aa wa ra aa wa
rr ra rw ar aa aw wr wa ww I R k k k k k k k k k ??? (10-69) 由此得到:
]][][~[]0[]~[]~[]~[F R G ra aa wa
a =??
??
??????=??? (10-70) 其中,
??
??
??????=]0[]0[]0[]0[][][]0[][][]~[rr ra rw ar aa aw wr wa ww g g g g G (10-71) 一般情况下,]~[a
?中含有子结构的刚体模态分量,为了消除刚体模态,令: ]][[]~[][r
r a a c φ??-= (10-72) ][r c 由下式决定:]][[]~[][r
r a a c φ??-= ]0[]][[][=a T r M ?φ (10-73)
从而:
]~][[][]~][[][][][1a
T r a T r r r M M m c ?φ?φ==- (10-74)
所以,惯性释放附着模态的计算公式为:
]
][][[][]~[][]~])[[]][[]([][F R G R R M I T
a
T a
T r r a ==-=??φφ? (10-75) 【例】对图示系统,设3u 为约束坐标,2u 是附着坐标,1u 为内部坐标, (1) 确定系统的附着模态 (2) 确定系统的自平衡力系 (3) 确定系统的惯性释放附着模态 系统的刚度阵和质量阵为:
??
??
?
?????=??????????----=100010001][101011112][m M k K
(1) 根据刚度矩阵,可以求得系统的柔度矩阵,从而
??
?
???=??????--=??????-2111121
k k k
k k
g g g g aa aw
wa ww
附着模态为:
??
??
?
?????=??????????=??????????=0211]0[][][]0[][][}{k g g ra aa wa ra aa wa a ψψψ (2) 系统有一个刚体模态
T r ]111[}{=φ
归一化后得到:
T r m
]111[31
}{=
φ 自平衡力系为:
2
1
3
[]????
??????--=?????????????????????------=????
?
???????????????????????
?????-??????????=?????
?????-==1213101021112111231010)1113111131000000100010001(]0[][]0[)]][][[]([]][[}{m m
m m m I M I F R F ra aa wa T r r E φφ 自平衡力系示意图如图。
(3) 系统的惯性释放附着模态为:
??
????????--=??????????--??????????????????????------==ψ4519112131000021011121112111231]
][][[][][k k F R G R T a 在模态综合法中,常常使用的是分支的惯性释放附着模态而不是分支的附着模态。(整体结构振动时,惯性释放附着模态是子结构更加可能的变形
形态)
【剩余惯性释放附着模态】 定义系统的弹性柔度阵][E G 为
T E E E E k G ][]][[][1φφ-= (10-76)
][E k 为系统对模态坐标的刚度矩阵。
][]][[][][2ωφφdiag K k E T E E == (10-77)
从而
T E E E G ][]][[][12φωφ-= (10-78)
k
95 k
94- k
91-
将完全弹性变形主模态][E φ分成保留主模态][k φ和剩余主模态][d φ,即
[]][][][d k E φφφ= (10-79)
T d d d T k k k E G ][]][[][]][[][1
212φωφφωφ--+= (10-80)
定义剩余柔度阵为:
T k k k E T d d d d G G ][]][[][][]][[][1212φωφφωφ---== (10-81)
根据(10-65)式与(10-70)式可得:
][]][~
[][E T G R G R = (10-82)
故
T k k k T d R G R G ][]][[]][~[][][1
2φωφ--= (10-83)
类似惯性释放附着模态,定义剩余惯性释放附着模态:
]][[][F G d a =ψ (10-84)
以上介绍了有关各种分支模态的概念,在以后的各种模态综合法中会看到各种模态综合方法的差异,就在于模态集的不同选取。
§10.3 固定界面模态综合法
子结构模态综合法的关键,是对子结构进行模态坐标变换。这首先要假设一组分支模态集,这一分支模态集中,通常不可缺少的是子结构主模态集,而在求解主模态集时,必须先要对子结构的边界坐标进行处理,或者固定,或者自由。固定界面模态综合法就是在求解保留主模态集时,界面坐标是通过引进的附加约束全部固定的。显然,这时解得的保留主模态集具有如下形式:
??
????=]0[][][kj ki k φφ (10-85) 下标i 表示内部自由度,j 表示界面自由度,k 表示保留主模态阶数,][φ是由子
结构在界面坐标固定情况下的特征值问题
}]{[}]{[2φωφii ii m k = (10-86)
求出的低阶特征矢量。]0[kj 是对应于界面坐标的模态分量。
固定界面模态综合法由Hutty 在1960年代初提出,经过Craig 和Bampton 两人在1968年改进后,修正为C-B 方法。
【Hutty 方法】
(1)有刚体运动子结构的分支模态集
基于运动学观点,结构运动分为牵连运动和相对运动,子结构内部任一点的位移,可用如下三种类型的运动来描述。 (1) 刚体位移——由][r ψ引起的牵连运动 (2) 约束模态][c ψ引起的牵连运动
(3) 子结构界面上全部加上附加约束后,子结构内部节点相对于这些约束的运
动,由固定界面分支主模态][N Φ来描述。
}
]{[}]{[}]{[}{}{}{}{n n c c r r N C R p p p u u u u Φψψ++=++= (10-87)
即
}]{[}{p u Φ= (10-88)
其中
[]][][][][n c r ΦψψΦ= (10-89) T T n T
c T
r p p p p ]}{}{}{[}{= (10-90)
因此在Hutty 方法中,对有刚体自由度的子结构,可以选取子结构对于界面静定坐标的刚体模态集,对于界面赘余坐标的约束模态集和子结构的固定界面
结构模态分析方法
模态分析技术的发展现状综述 摘要:本文首先系统的介绍了模态分析的定义,并以模态分析技术的理论为基础,查阅了大量的文献和资料后,介绍了三种模态分析技术在各领域的应用,以及国内外对于结构模态分析技术研究的发展现状,分析并总结三种模态分析技术的特点与发展前景。 关键词:模态分析技术发展现状 Modality Analysis Technology Development Present Situation Summary Abstract:This article first systematic introduction the definition of modality analysis,and based on modal analysis theory,after has consulted the massive literature and the material.Introduced application about three kind of modality analysis technology in various domains. At home and abroad, the structural modal analysis technology research and development status quo.Analyzes and summarizes three kind of modality analysis technology characteristic and the prospects for development. Key words:Modality analysis Technology Development status 0 引言 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。模态分析的过程如果是由有限元计算的方法完成的,则称为计算模态分析;如果是通过试验将采集的系统输入与输出信号经过参数识别来获得模态参数的,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。 1 数值模态分析的发展现状 数值模态分析主要采用有限元法,它是将弹性结构离散化为有限数量的具体质量、弹性特性单元后,在计算机上作数学运算的理论计算方法。它的优点是可以在结构设计之初,根据有限元分析结果,便预知产品的动态性能,可以在产品试制出来之前预估振动、噪声的强度和其他动态问题,并可改变结构形状以消除或抑制这些问题。只要能够正确显示出包含边界条件在内的机械振动模型,就可以通过计算机改变机械尺寸的形状细节。有限元法的不足是计算繁杂,耗资费时。这种方法,除要求计算者有熟练的技巧与经验外,有些参数(如阻尼、结合面特征等)目前尚无法定值,并且利用有限元法计算得到的结果,只能是一个近似值。 正因如此,大多数数学模拟的结构,在试制阶段常应做全尺寸样机的动态试验,以验证计算的可靠程度并补充理论计算的不足,特别对一些重要的或涉及人身安全的结构,就更是如此。 70 年代以来,由于数字计算机的广泛应用、数字信号处理技术以及系统辨识方法的发展 , 使结构模态试验技术和模态参数辨识方法有了较大进展,所获得的数据将促进产品性能的改进、更新[1] 。在硬件上,国外许多厂家研制成功各种类型的以FFT和
DHMA实验模态分析系统的概述
DHMA实验模态分析系统的概述 江苏东华测试技术有限公司推出的“DHMA实验模态分析系统”, 从激励信号、传感器、适调器、数据采集和分析软件到实验报告的生成,构成了完整的进行实验模态分析的硬件和软件条件。专业的技术培训,保证了用户可靠、准确、合理的使用本系统。 DHMA实验模态分析系统汇集了公司多年来硬件、软件研发经验,和广大用户对实验模态分析系统的改进意见,参考国内外实验模态分析领域专家学者的研究成果和指导意见,功能强大,特点鲜明:采用内嵌专业知识的软件模式,即使是非专业的用户也可以成功地进行模态实验;内嵌的工作流程保证符合质量标准的重复实验过程;强大的模态参数提取技术保证了高质量、不受操作者经验多寡的影响,即使对模态高度密集或阻尼很大的结构也游刃有余。 汽车白车身现场图片
汽车白车身一阶振型 针对不同实验对象的特点,本公司提供了三种具体的解决方案,满足了大多数用户的需求: 方案一:不测力法(环境激励)实验模态分析系统 不测力法实验模态分析(OMA)可用于对桥梁及大型建筑、运行状态的机械设备或不易实现人工激励的结构进行结构特性的动态实验。仅利用实测的时域响应数据,通过一定的系统建模和曲线拟合的方法识别结构的模态参数。桥梁及大型建筑、运行状态下的机械设备等不易实现人工激励的结构均可采用不测力法来进行实验模态分析。
方案二:锤击激励法实验模态分析系统 DHMA实验模态分析系统可以提供用户完整的锤击激励法实验模态分析完整的解决方案,是对被测结构用带力传感器的力锤施加一个已知的输入力,测量结构各点的响应,利用软件的频响函数分析模块计算得到各点频响函数数据。利用频响函数,通过一定的模态参数识别方法得到结构的模态参数。锤击激励法实验模态分析可分为单点激励法和单点拾振法。
环境振动下模态参数识别方法综述.
环境振动下模态参数识别方法综述 摘要:模态分析是研究结构动力特性的一种近代方法,是系统识别方法在工程振动领域中的应用。环境振动是一种天然的激励方式,环境振动下结构模态参数识别就是直接利用自然环境激励,仅根据系统的响应进行模态参数识别的方法。与传统模态识别方法相比,具有显著的优点。本文主要是做了环境振动下模态识别方法的一个综述报告。 关键词:环境振动模态识别综述 Abstract: The modal analysis is the study of structural dynamic characteristics of a modern method that is vibration system identification methods in engineering applications in the field. Ambient vibration is a natural way of incentives, under ambient vibration modal parameter identification is the direct use of the natural environment, incentives, based only on the response of the system for modal parameter identification method. With the traditional modal identification methods, has significant advantages. This paper is a summary report of the environmental vibration modal identification method. Keywords: Ambient vibration ;modal parameters ;Review 随着我国交通运输事业的发展,各种形式的大、中型桥梁不断涌现,由于大型桥梁结构具有结构尺大、造型复杂、不易人工激励、容易受到环境影响、自振频率较低等特点,传统模态参数识别技术在应用上的局限性越来越突出。传统的振动试验采用重振动器或落锤激励桥梁,需要投入大量人力和试验设备,激励成本增高,难度大,而且对于桥梁这样的大型复杂结构,激励(输入)往往很难测得,也不适合长期监测的实验模态分析。 环境振动是指振幅很小的环境地面运动。系由天然的和(或)人为的原因所造成,例如风、海浪、交通干扰或机械振动等,受激结构的振幅较小,但响应涵盖频率丰富。系统或者结构的模态参数包括:模态频率、模态阻尼、模态振型等。模态参数识别是系统识别的一部分,通过模态参数的识别可以了解系统或结构的动力学特性,这些动力特性可以作为结构有限元模型修正、故障诊断、结构实时监测的评定标准和基础。环境振动下的模态参数识别就是利用自然环境激励,根据结构的动
振动测试理论和方法综述
振动测试理论和方法综述 摘要:振动是工程技术和日常生活中常见的物理现象。在长期的科学研究和工程实践中,已逐步形成了一门较完整的振动工程学科,可供进行理论计算和分析。随着现代工业和现代科学技术的发展,对各种仪器设备提出了低振级和低噪声的要求,以及对主要生产过程或重要设备进行监测、诊断,对工作环境进行控制等等。这些都离不开振动的测量。振动测试技术在工业生产中起着十分重要的作用,为此设计和制造高效的振动测试系统便成为测试技术的重要内容。本文概述了振动测试的发展历程,总结和分析了振动测试系统的基本组成和应用理论,列举了几种机械振动测试系统的类型。最后分析了振动测试系统的几个发展趋势。 关键词:振动测试;振动测试系统;测试技术;激振测试系统 1.引言 振动问题广泛存在于生活和生产当中。建筑物、机器等在内界或者外界的激励下就会产生振动。而机械振动常常会破坏机械的正常工作,甚至会降低机械的使用寿命并对机器造成不可逆的损坏。多数的机械振动是有害的。因而对振动的研究不仅有利于改善人们的生活环境和生活水平,也有助于提高机械设备的使用寿命,提高人们的生产效率。正因如此振动测试在生产和科研等多方面都有着十分重要的地位[1]。为了控制振动,将振动给人们带来的危害降至最低,就需要我们了解振动的特性和规律,对振动进行测试和研究。振动测试应运而生。 振动测试有着较为长久的发展历史,是与人类社会的发展有着紧密的联系。随着计算机技术和相关高科技技术的问世和发展,振动测试系统也有了飞跃性的发展。振动测试系统从最早的简单机械设备的应用到如今的先进的计算机技术和设备的应用。从刚开始的检测人员的耳朵来进行测量、判断和计算出大概的故障点的原始方法到现在的计算机控制、存储、处理数据的处理[2],无不体现出振动测试系统的长足发展和飞跃式的进步。与此同时,振动测试在理论方面也有了长足的发展,1656 年惠更斯首次提出物理摆的理论并且创造出了单摆机械钟到现今的自动控制原理和计算机的日趋完善,人们对机械振动分析的研究已日趋成熟。而伴随着振动测试系统的进步和日臻成熟,其在国民的日常生活和生产中所扮演的角色也愈发的重要。 2.振动测试与分析系统(TDM)的发展
ansys模态分析步骤
模态分析步骤 第1步:载入模型 Plot>Volumes 第2步:指定分析标题并设置分析范畴 1 设置标题等Utility Menu>File>Change Title Utility Menu>File> Change Jobname Utility Menu>File>Change Directory 2 选取菜单途径 Main Menu>Preference ,单击 Structure,单击OK 第3步:定义单元类型 Main Menu>Preprocessor>Element Type>Add/Edit/Delete,出现Element Types对话框,单击Add出现Library of Element Types 对话框,选择Structural Solid,再右滚动栏选择Brick 20node 95,然后单击OK,单击Element Types对话框中的Close按钮就完成这项设置了。 第4步:指定材料性能 选取菜单途径Main Menu>Preprocessor>Material Props>Material Models。出现Define Material Model Behavior对话框,在右侧Structural>Linear>Elastic>Isotropic,指定材料的弹性模量和泊松系数,Structural>Density指定材料的密度,完成后退出即可。 第5步:划分网格 选取菜单途径Main Menu>Preprocessor>Meshing>MeshTool,出
现MeshTool对话框,一般采用只能划分网格,点击SmartSize,下面可选择网格的相对大小(太小的计算比较复杂,不一定能产生好的效果,一般做两三组进行比较),保留其他选项,单击Mesh出现Mesh Volumes对话框,其他保持不变单击Pick All,完成网格划分。 第6步:进入求解器并指定分析类型和选项 选取菜单途径Main Menu>Solution>Analysis Type>New Analysis,将出现New Analysis对话框,选择Modal单击 OK。 选取Main Menu>Solution> Analysis Type>Analysis Options,将出现Modal Analysis 对话框,选中Subspace模态提取法,在 Number of modes to extract处输入相应的值(一般为5或10,如果想要看更多的可以选择相应的数字),单击OK,出现Subspace Model Analysis对话框,选择频率的起始值,其他保持不变,单击OK。 第7步:施加边界条件. 选取Main Menu>Solution>Define loads>Apply>Structural>Displacement,出现ApplyU,ROT on KPS对话框,选择在点、线或面上施加位移约束,单击OK会打开约束种类对话框,选择(All DOF,UX,UY,UZ)相应的约束,单击apply或OK即可。第8步:指定要扩展的模态数。选取菜单途径Main Menu>Solution>Load Step Opts>ExpansionPass>Expand Modes,出现Expand Modes对话框,在number of modes to expand 处输入第6步相应的数字,单击 OK即可。(当选取Main Menu>Solution> Analysis Type>Analysis Options,将出现Modal Analysis 对话框,选中Subspace模态提取法,在 Number of modes to extract处输入相应
准滑动模态控制matlab仿真实例.
准滑动模态控制 2.8.1准滑动模态控制 在滑动模态控制系统中,如果控制结构的切换具有理想的开关特性,则能在切换面上形成理想的滑动模态,这是一种光滑的运动,渐进趋近于原点。但在实际工程中,由于存在时间上的延迟和空间上的滞后等原因,使得滑动模态呈抖振形式,在光滑的滑动上叠加了抖振。理想的滑动模态是不存在的,现实中的滑动模态控制均伴随有抖振,抖振问题是影响滑动模态看控制广泛应用的主要障碍。 所谓准滑动模态,是指系统的运动轨迹被限制在理想滑动模态的某一?领域内的模态。从相轨迹方面来说,具有理想滑动模态的控制是使一定范围内的状态点均被吸引至切换面。而准滑动模态控制则是使一定范围内的状态点均被吸引至切换面的某一?领域内,通常称此?领域为滑动模态切换面的边界层。 在边界层内,准滑动模态不要求满足滑动模态的存在条件,因此准滑动模态不要求在切换面上进行控制结构的切换。它可以在边界层上进行结构变换的控制系统,也可以根本不进行结构变换的连续状态反馈控制系统。准滑动模态控制在实现上的这种差别,使它从根本上避免或削弱了抖振,从而在实际中得到了广泛的应用。 在连续系统中,常用的准滑动模态控制有以下两种方法: (1) 用饱和函数()sat s 代替理想滑动模态中的符号函数sgn()s 。 1 ()1s sat s ks s s >??? =≤???-<-? ? 1k = ? (2.46) 其中?称为“边界层”。饱和函数()sat s 如图2-26所示,饱和函数的本质为:在边界层外,采用切换控制;在边界之内,采用线性化反馈控制。 (2) 将继电特性连续化,用连续函数()s θ取代sgn()s 。 ()s s s θδ = + (2.47) 式中δ是很小的正常数。 2.8.2 仿真实例 对象为二阶传递函数:
试验模态分析的两种方法
试验模态分析的两种方法 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。模态分析最终目标在是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 试验模态分析主要有以下两种方法,OROS模态分析软件MODEL 2 完全具备了这两种常用的模态方 法。 锤击法模态测试 用于满足锤击法结构模态试验,以简明、直观的方法测量和处理输入力和响应数据,并显示结果。提供两种锤击方法:固定敲击点移动响应点和固定响应点移动敲击点。用力锤来激励结构,同时进行加速度和力信号的采集和处理,实时得到结构的传递函数矩阵。能够方便地设置测量参数,如触发量级、测量带宽和加窗类型,同时对最优的设置提供建议指导。 激振器法模态测试 主要是通过分析仪输出信号源来控制激振器,激励被测试件,输出信号有先进扫频正弦,随机噪声,正弦,调频脉冲等信号。支持单点激励(SIMO)与多点同时激励法(MIMO)。 1)几何建模 结构线架模型生成,节点数和部件数没有限制,测量点DOF自动加到通道标示;建立几何模型,以3维方式显示测量和分析结果。结构模型可以作为单个部件的装配,及采用不同的坐标系(直角、圆柱、球体坐标系),要求除点的定义外,还可定义线和面,真实的显示试验结构。结构线架模型生成,节点数和部件数没有限制,测量点自由度自动加到通道标示。
机床实验模态分析综述
机床的模态分析方法综述 甄真 (北京信息科技大学机电工程学院,北京100192) 摘要:模态分析是研究机械结构动力特性的一种近代方法,是结构动态设计及设备的故障诊断的重要方法。机床在工作时,由于要承受各种变载荷而产生振动,其精度和寿命会受到影响。因此有必要对机床进行模态分析,了解其动态特性,以便进一步分析和改进。本文概述了模态分析的概念、研究意义及发展历史,介绍了机床模态分析的研究现状, 从理论方法与试验方法两方面指出了其关键技术以及研究发展方向。 关键词:模态分析;动态特性;机床;理论方法;实验方法 Summary of the model analysis method of machine tool ZHEN Zhen (Beijing Information Science & Technology University, Mechanical and Electrical Engineering College, Beijing, 100192) Abstract:Modal analysis is a modern method to study the dynamic characteristics of mechanical structure. It’s an important method in structure dynamic design and fault diagnosis of equipment.Its accuracy and lifetime will be affected due to withstand all kinds of variable load and vibration when the machine tool works.So it is necessary to make modal analysis and to understand the dynamic characteristics for machine tool in order to further analyze and improve. This paper summarizes the concept, significance and history of modal analysis and introduces the research status of model analysis of machine tool. It also points out the key technology and research direction in this field from two aspects of theoretical method and experimental method. Key words:model analysis; dynamic characteristics; machine tool; theoretical method; experimental method 0 引言 模态是指机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。模态分析是一种研究机械结构动力的方法,是系统辨别方法在工程振动领域中的应用。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可预言结构在此频段内在外部或内部各种振源作用下实际响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法[1]。 模态分析将构件的复杂振动分解为许多简单而独立的振动,并用一系列模态参数来表征的过程。根据线性叠加原理,一个构件的复杂振动是由无数阶模态叠加的结果。在这些模态中。模态分析最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。模态分析主要分为3类方法:一是,基于计算机仿真的有限元分析法;二是,基于输入(激励)输出(响应)模态试验的试验模态分析法;三是,基于仅有输出(响应)模态试验的运行模态分析法。有限元分析属结构动力学正问题,但受无法准确描述复杂边界条件、结构物理参数和部件连接状态等不确定性因素的限制难以达到很高的精度。第二、三类方法属结构动力学反问题,基于真实结构的模态试验。因而能得到更准确
模态分析意义
模态分析意义模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息变化。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与胯动响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。近十多年来,由于计算机技术、
FFT 分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析得到了很快的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。已有多种档次、各种原理的模态分析硬件与软件问世。在各种各样的模态分析方法中,大致均可分为四个基本过程:(1)动态数据的采集及频响函数或脉冲响应函数分析1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。2)数据采集。SISO 方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振形数据。SIMO 及MIMO 的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。(2)建立结构数学模型根据已知条件,建立一种描述结构状态及特性的模型,作为计算及识别参数依据。目前一般假定系统为线性的。由于采用的识别方法不同,也分为频域建模和时
各种模态分析方法总结及比较
各种模态分析方法总结与比较 一、模态分析 模态分析是计算或试验分析固有频率、阻尼比和模态振型这些模态参数的过程。 模态分析的理论经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模记分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析最终目标是在识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。二、各模态分析方法的总结
(一)单自由度法 一般来说,一个系统的动态响应是它的若干阶模态振型的叠加。但是如果假定在给定的频带内只有一个模态是重要的,那么该模态的参数可以单独确定。以这个假定为根据的模态参数识别方法叫做单自由度(SDOF)法n1。在给定的频带范围内,结构的动态特性的时域表达表示近似为: ()[]}{}{T R R t r Q e t h r ψψλ= 2-1 而频域表示则近似为: ()[]}}{ {()[]2ωλωψψωLR UR j Q j h r t r r r -+-= 2-2 单自由度系统是一种很快速的方法,几乎不需要什么计算时间和计算机内存。 这种单自由度的假定只有当系统的各阶模态能够很好解耦时才是正确的。然而实际情况通常并不是这样的,所以就需要用包含若干模态的模型对测得的数据进行近似,同时识别这些参数的模态,就是所谓的多自由度(MDOF)法。 单自由度算法运算速度很快,几乎不需要什么计算和计算机内存,因此在当前小型二通道或四通道傅立叶分析仪中,都把这种方法做成内置选项。然而随着计算机的发展,内存不断扩大,计算速度越来越快,在大多数实际应用中,单自由度方法已经让位给更加复杂的多自由度方法。 1、峰值检测 峰值检测是一种单自由度方法,它是频域中的模态模型为根据对系统极点进行局部估计(固有频率和阻尼)。峰值检测方法基于这样的事实:在固有频率附近,频响函数通过自己的极值,此时其实部为零(同相部分最
汽车车身模态分析研究综述
汽车车身模态分析研究综述 北京信息科技大学研1202班姓名:曹国栋学号:2012020045 摘要:车身是汽车的关键总成。它的构造决定了整车的力学特性,对白车身进行模态分析不仅能考察车身结构的整体刚度特性,而且可以指导人们对车身结构进行优化以及响应分析。因此,研究车身模态分析具有重要的意义。本文综述了近几年国内外在车身模态分析领域内的研究,总结了研究理论和试验方法,并进行归纳。最后,对未来的研究工作提出了一些展望。 关键词:车身;模态分析;有限元模态;试验模态;结构优化 0 前言 随着计算机技术的发展和仿真技术、有限元分析技术的提高,计算机辅助设计和分析技术几乎涵盖了涉及汽车性能的所有方面,如刚度、强度、疲劳寿命、振动噪声、运动与动力性分析、碰撞仿真和乘员保护、空气动力学特性等,各种计算机辅助设计软件为汽车设计提供了一个工具平台,极大地方便了汽车的设计。 车辆在行驶过程中,车身结构在各种振动源的激励下会产生振动,如发动机运转、路面不平以及高速行驶时风力引起的振动等。如果这些振源的激励频率接近于车身整体或局部的固有频率,便会发生共振现象,产生剧烈振动和噪声,甚至造成结构破坏。为提高汽车的安全性、舒适性和可靠性,就必须对车身结构的固有频率进行分析,通过结构设计避开各种振源的激励频率。 车身结构模态分析是新车型开发中有限元法应用的主要领域之一,是新产品开发中结构分析的主要内容。尤其是车身结构的低阶弹性模态,它不仅反映了汽车车身的整体刚度性能,而且是控制汽车常规振动的关键指标,应作为汽车新产品开发的强制性考核内容。有限元模态分析和试验模态分析方法是辨识汽车结构动态性能的一种有效的手段,在汽车车身动态性能研究中得到了广泛应用。采用有限元方法对白车身进行模态分析,识别出车身结构的模态参数,并通过模态试验验证了有限元模型的正确性,为改型设计提供参考依据,是汽车开发设计与优化的一般流程。 因此,研究车身结构模态分析,进行车身轻量化设计和优化,对于提高国产轿车的自开发与科技创新能力,具有重要的理论意义和工程实用价值。 1 车身模态分析的一般理论 1.1 模态分析基本理论 模态分析的经典定义即以模态矩阵作为变换矩阵,将线性定常系统振动微分方程组中的物理坐标进行坐标转换变到模态坐标上,从而使系统在原来坐标下的耦合方程变成一组互相独立的二阶常微分方程进而成为一组以模态坐标及模态参数描述的独立方程[1]。 在实际的结构动力分析中,一般将连续结构离散化为一个具有n个有限自由
模态分析在工程中的应用概述
模态分析在工程中的应用概述 学号:XXXXXX 姓名:XXX 模态分析是研究结构动力特性的一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析(FEA);如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为实验模态分析(EMA)。通常,模态分析都是指实验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析所寻求的最终目标在于改变机械结构系统由经验与类比和静态设计为动态、优化设计方法;在于借助试验与理论分析相结合的方法,对已有结构系统进行识别、分析和评价,从中找出结构系统在动态性能上所存在的问题,确保工程结构能安全可靠及有效地工作;在于根据现场测试的数据来这段及预报振动故障和进行噪声控制。通过这些方法为老产品的改进和新产品的设计提供可靠的依据。[1] 模态分析是一项综合性技术,可以应用于各个工程部门及各种工程结构。机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息万变。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速Fourier 变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对实验导纳函数的曲线拟合,识别出结构物体的模态参数,从而建立起结构物体的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物体的实际振动的响应历程或响应谱。[2] 模态分析技术的应用可以归纳为以下几个方面:评价现有结构系统的动态特性,在新产品设计中进行结构动态特性的预估及优化设计,诊断及预报机构系统的故障,控制结构的辐射噪声,识别结构系统的载荷。[1] 下面对近几年国内模态分析在工程中各个方面的应用分别进行概述。 1.评价现有结构系统的动态特性 在处理结构的振动问题时,必须对其动态特性有全面的了解,而其动态特性
机械结构的模态分析方法研究综述
机械模态分析与实验 学院:机电工程学院 专业:机械制造及其自动化 姓名:马阳 班级:研1302 学号:2013020049
机械结构的模态分析方法研究综述 马阳 摘 要:模态分析是研究机械结构动力特性的一种近代方法,是指通过计算或实验获得机构的固有频率、阻尼比和模态振型等模态参数的过程,是结构动态设计及设备的故障诊断的重要方法。本文对模态分析的基本概念、研究目的、分类、分析方法、发展历程、发展现状和展望一一作了阐述。 关键词:模态分析;模态参数;模态识别;非线性模态 0 引言 模态是指机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。模态分析是一种研究机械结构动力的方法,是系统辨别方法在工程振动领域中的应用[1]。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可预言结构在此频段内在外部或内部各种振源作用下实际响应。因此,模态析是结构动态设计及设备的故障诊断的重要方法[2]。 1 模态分析概述 1.1 模态分析定义 模态分析的经典定义是:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型[3]。 模态分析将构件的复杂振动分解为许多简单而独立的振动,并用一系列模态参数来表征的过程。根据线性叠加原理,一个构件的复杂振动是由无数阶模态叠加的结果。在这些模态中。模态分析最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊 断和预报以及结构动力特性的优化设计提供依据。 1.2 模态分析基础 1.2.1 无阻尼的情况 实际的机械结构在计算的过程中常常会被简化成多自由度系统。该系统为线性时不变系统。多自由度振动系统可以写成如下的耦合方程形式,可以用矩阵来表示如下: 上式中X 为系统每个自由度的位移向量,对应着系统的各个自由度,M 为系统的质量矩阵,C 为系统的阻尼阵,K 为系统的刚度矩阵,F(t)为系统所受的外力。 为了求解方便,首先考虑没有阻尼的特殊情况(C=0)。 []{()}{()}{()}M X t K X t f t ??+= (1) 设,st X e s jw ψ== 为了求解上式,考虑外力为0时的自由振动齐次解。得到特征方程: 2[][]0Det w M K -+= 由特征方程可以求得特征值(固有频率),与固有频率一一对应可以求得满足式(1)等于0的{}{}{}12,,n ψψψ值,即为求得的特征向量。振动模态之间有正交性,可以证明: ()M X C X KX F t ???++=
模态分析综述
模态分析综述 1、前言 最初是听师兄们说起“模态”这么名词的,但由于各种原因刚开始对模态没有过多的关注,后来选课的时候师兄们极力推荐褚老师的模态分析课,说以后用处很大,于是就毅然决然的选了褚老师的结构模态分析理论与应用这门课。初次上这课并不怎么听得懂,但却被褚老师幽默风趣的讲课风格所吸引!另外褚老师世界著名的振动噪声测量及分析解决方案供应商Brüel&K?jr中国公司外聘技术专家、技术总工程师的头衔也深深地震撼了我,并且也激发了我去深入了解模态的兴趣,于是在上网和查阅了一些书籍之后对模态分析有了一定的认识,然而遗憾的是目前对于常用的模态分析软件ansys还不是很熟练,所以也就只好先写一下自己对于模态分析的认知了,还望老师海涵! 模态分析是近代才被用来研究结构动力特性的一种方法,是被用在工程振动领域中的系统识别上的。模态是机械结构固有的振动特性,每一个模态都具有自己特定的固有频率、阻尼比和模态振型。我想这应该就像每个人都具有自己独特的DNA一样吧,可以根据这个特性来辨识每个人的身份。机械结构的这些模态参数通常是计算机或者实验分析来获得的,而进行计算或者分析的过程就被称之为模态分析。模态分析的过程应该和人类的DNA检测差不多吧。通常将通过试验把采集到的系统输入与输出信号经过参数识别获得模态参数的方法称为试验模态分析。通过模态分析的方法可以搞清楚结构物在某一个易受影响的频率范围内的各阶主要模态的特性,这样就可以预先知道结构在此频段内在外部或者内部各种振源作用下所产生的实际振动响应。也正因此模态分析成为了结构动态设计以及设备故障诊断的重要方法。其实这样看来,模态分析的过程真的和DNA检测相类似,通过DNA检测也可以知道某个人是否存在先天的生理病因,并及时的得到预防和治疗。 2、模态分析的发展过程 模态分析技术是起源于上世纪30年代所提出来的将机电进行比拟机械阻抗技术。然而在当时由于测试技术及计算机技术的限制,模态分析技术在很长的时期
模态分析与参数识别
模态分析方法在发动机曲轴上的应用研究 xx (xx大学 xxxxxxxx学院 , 山西太原 030051) 摘要:综述模态分析在研究结构动力特性中的应用,介绍模态分析的两大方法:数值模态分析与试验模态分析。并着重介绍目前的研究热点一一工作模态分析。通过发动机曲轴的模态分析这一具体的实例,综述了运行模态分析国内外研究现状,指出了其关键技术、存在问题以及研究发展方向。 关键词:模态分析数值模态试验模态工作模态 Abstract :Sums up methods of model analysis applied on the research of configuration dynamic;al characteristio. It introduces two methods of model analysis: numerical value model analysis and experimentation model analysis. Then it stresses the hotspot-working model analysis.Some key techniques, unsolved problems and research directions of OMA were also discussed. Key words:Model analysis Numerical value model analysis Experimentation model analysis Working model analysis 1、引言 1.1模态分析的基本概念 物体按照某一阶固有频率振动时,物体上各个点偏离平衡位置的位移是满足一定的比例关系的,可以用一个向量表示,这个就称之为模态。模态这个概念一般是在振动领域所用,你可以初步的理解为振动状态,我们都知道每个物体都具有自己的固有频率,在外力的激励作用下,物体会表现出不同的振动特性。 一阶模态是外力的激励频率与物体固有频率相等的时候出现的,此时物体的振动形态叫做一阶振型或主振型;二阶模态是外力的激励频率是物体固有频率的两倍时候出现,此时的振动外形叫做二阶振型,以依次类推。
模态分析基本内容简介
模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。 概述 振动模态是弹性结构固有的、整体的特性。通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内的各阶主要模态的特性,就可以预言结构在此频段内在外部或内部各种振源作用下产生的实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。 机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动模态各不相同。模态分析提供了研究各类振动特性的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。 近十多年来,由于计算机技术、FFT分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析得到了很快的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。已有多种档次、各种原理的模态分析硬件与软件问世。 用处
模态分析的最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 模态分析技术的应用可归结为以下几个方面: 1) 评价现有结构系统的动态特性; 2) 在新产品设计中进行结构动态特性的预估和优化设计; 3) 诊断及预报结构系统的故障; 4) 控制结构的辐射噪声; 5) 识别结构系统的载荷。 最佳悬挂点 模态试验时,一般希望将悬挂点选择在振幅较小的位置,最佳悬挂点应该是某阶振型的节点。 最佳激励点 最佳激励点视待测试的振型而定,若单阶,则应选择最大振幅点,若多阶,则激励点处各阶的振幅都不小于某一值。如果是需要许多能量才能激励的结构,可以考虑多选择几个激励点。 最佳测试点 模态试验时测试点所得到的信息要求有尽可能高的信噪比,因此测试点不应该靠近节点。在最佳测试点位置其AD DOF(Average Driving DOF Displacement)值应该较大,一般可用EI(Effective Independance)法确定最佳测试点。 模态参数有那些 模态参数有:模态频率、模态振型、模态质量、模态向量、模态刚度和模态阻尼等。 主模态主空间主坐标 无阻尼系统的各阶模态称为主模态,各阶模态向量所张成的空间称为主空间,其相应的模态坐标称为主坐标。 模态截断