电阻炉炉温控制系统设计报告

目录
第一章系统综述 (2)
1.1 概述 (2)
1.2 方案描述 ..................................................................................... 错误!未定义书签。
1.3 报告概述 (2)
第二章课程设计要求 (3)
2.1 课题要求 (3)
2.2 元器件清单 (3)
第三章电路设计 (3)
3.1 总体设计方案 (3)
3.2 数据处理流程 (4)
第四章硬件电路设计 (4)
4.1 SL-I型51单片机综合实验箱 (4)
4.1.1 单片机最小系统 (4)
4.1.2 数码管显示模块 (5)
4.1.3 按键模块 (7)
4.1.4 报警模块 (9)
4.2 温度采集电路 (9)
4.2.1 DS18B20简介 (9)
4.2.2 温度计算 (10)
4.2.3 DS18B20工作过程及时序 (11)
4.3 继电器电路设计 (12)
第五章系统软件设计 (14)
5.1 主程序设计 (14)
5.2 数码管显示程序 (14)
5.3 键盘扫描程序 (15)
5.4 DB18B20通信程序 (15)
第六章加热炉温控系统使用方法 (16)
6.1 系统连接方法 (16)
6.2 系统使用方法 (16)
第七章实验数据 (17)
第八章总结 (17)
参考文献17
附录A 系统程序代码 (17)
第一章系统综述
1.1概述
(1)课题内容:应用计算机的实时监控和温度测量技术,采用单片机、温度检测电路、温度控制电路等,实现电阻炉炉温的实时控制。
(2)要求及技术指标:运用单片机及相应的部件组成电阻炉炉温的自动控制系统,要求炉温控制在0~100℃范围内,并实现将炉温保温值控制在30~60℃的变化范围。具体设计要求包括:
①完成电阻炉温度控制系统的设计,包括硬件电路设计和软件程序设计;
②能够实时显示电阻炉的实际炉温,以及恒定炉温出现的时间与恒温保持的时间;
③温度超过预定值时,能够报警;
④对电阻炉炉温控制电路设计相应的保护电路,保证其安全、可靠地工作。
1.2方案描述
基本方案:利用温度变送器及温度检测电路将电阻炉实际温度转换成相应的数字信号送入单片机,单片机进行数据处理后,通过显示器显示温度并判断是否报警,同时将实际炉温与设定温度比较,根据相应的算法(如PID)计算出控制量,通过控制相应的加热电路实现对炉温的控制。
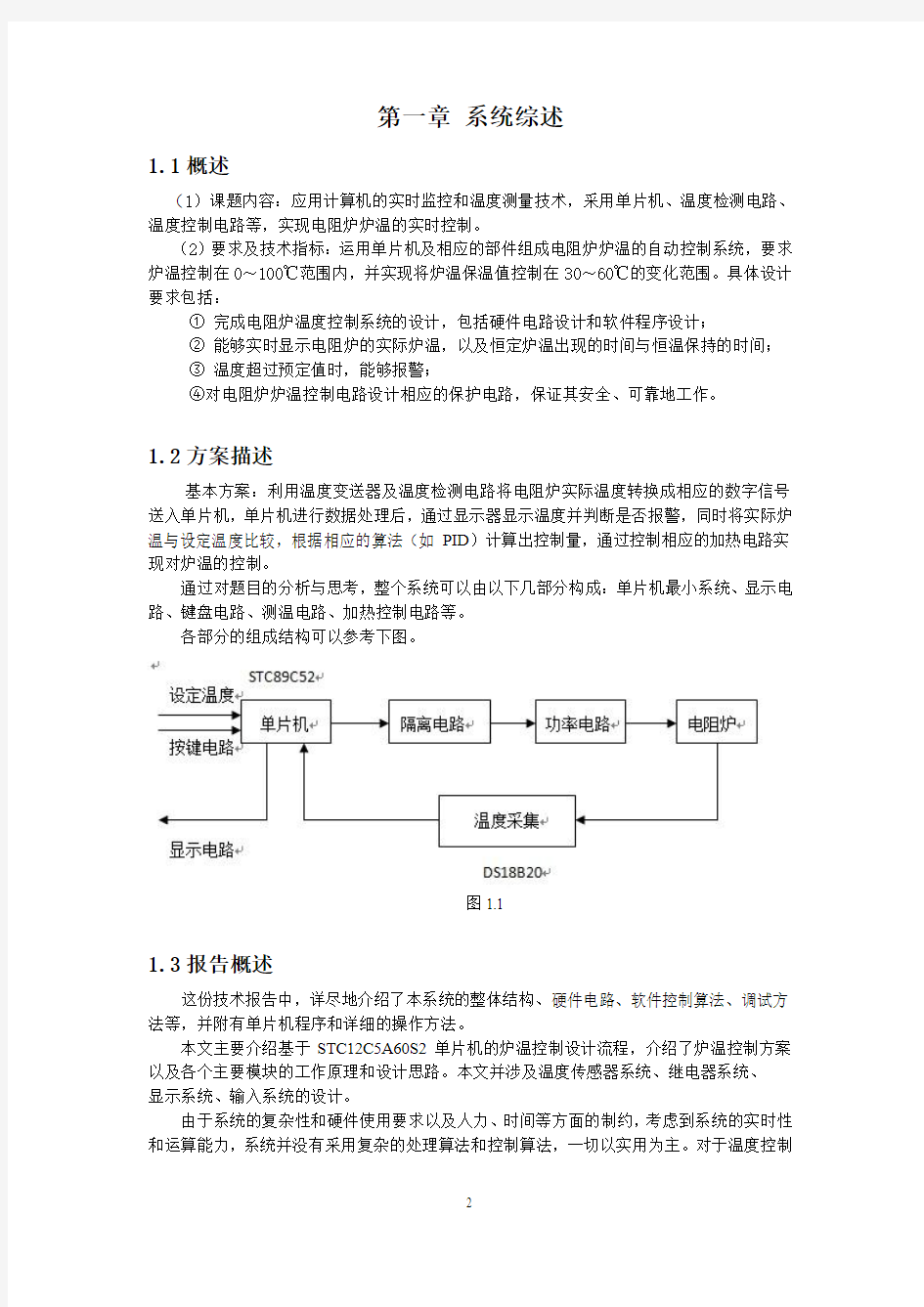
通过对题目的分析与思考,整个系统可以由以下几部分构成:单片机最小系统、显示电路、键盘电路、测温电路、加热控制电路等。
各部分的组成结构可以参考下图。
图1.1
1.3报告概述
这份技术报告中,详尽地介绍了本系统的整体结构、硬件电路、软件控制算法、调试方法等,并附有单片机程序和详细的操作方法。
本文主要介绍基于STC12C5A60S2单片机的炉温控制设计流程,介绍了炉温控制方案以及各个主要模块的工作原理和设计思路。本文并涉及温度传感器系统、继电器系统、
显示系统、输入系统的设计。
由于系统的复杂性和硬件使用要求以及人力、时间等方面的制约,考虑到系统的实时性和运算能力,系统并没有采用复杂的处理算法和控制算法,一切以实用为主。对于温度控制
算法还有待进一步的研究和改进。同时,在电路保护方面的设计有待进一步地学习和实践。
第二章课程设计要求
2.1课题要求
用单片机及相应的组成部件组成电阻炉温的自动控制系统,要求测温范围0~100℃,使其控制系统控制的温度保温值的变化范围为30~60℃。
要求:(1)完成电阻炉温度控制系统设计,包括硬件电路设计和软件程序设计;
(2)能够显示控温时的实际炉温和恒温时间;
(3)对其主电路和控制电路设计相应的保护电路,使其安全可靠地工作。
2.2元器件清单
表2.1 元器件清单
第三章电路设计
3.1总体设计方案
本系统采用STC12C5A60S作为系统的主控芯片,负责加热炉的温度检测与控制。
其主要任务是:
1、读取DS18B20的温度数据;
2、控制继电器通断,保证温度达到设定值并保温;
3、读取键盘设置的温度值;
4、在LED上显示设置的温度、当前温度以及恒温时间;
5、当温度到达警戒值的时候控制蜂鸣器报警。
图3.1 总体结构图
由于加热炉仅能通过通断电路控制,不具备良好的可控性,且加热所需的速度和精度要求并不高,这里无需使用PID算法这样的高速跟踪算法,只要使用二次线性化的方法控制,就可以很好地实现炉子的加热和恒温控制了。
3.2数据处理过程
首先使用循环查询的方法依次读取按键的键值,判断用户的指令,并以此为依据选择LED显示的数据。输入过程结束后,开始炉温控制模块,首先读取DS18B20数据,再与设定值比较,决定继电器的通断时间,控制加热炉温度及警报器超限报警。
图3.2 数据处理流程图
第四章硬件电路设计
4.1 SL-I型51单片机综合实验箱
4.1.1单片机最小系统
STC12C5A60S2系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),针对电机控制,强干扰场合。
最小系统如图4.1所示:
图4.1 单片机最小系统
4.1.2数码管显示模块
数码管的显示原理不论是共阴还是共阳,其基本原理是一样的,都是靠点亮内部的LED 来发光。一位数码管的引脚是十个,显示一个8字需要7个小段,另外还有一个小数点。
图4.2 数码管内部原理图
实验时为了保证编程的方便,通常将数码管的数字所对应的八位数字记录在数组中,程
端”是连在一起的,他们的GND或VCC端作为“位选端”来输入控制信号,这样单片机就可以通过程序来控制显示的字符。
下图是实验箱开发板中的数码管电路图:
图4.3 实验箱数码管电路
4.1.3按键模块
弹性按键被按下时闭合,松手后自动断开。单片机检测按键的原理是:单片机的I/O口既可以作为输出也可作为输入使用,当检测按键时使用的是它的输入功能,把按键的一端接地,另一端与单片机的某一个I/O口相连,开始时先给I/O口赋一高电平,然后让单片机不断地检测该I/O口是否变成低电平,当按键闭合时,即相当于该I/O口通过按键与地相连,变成低电平,程序一旦检测到I/O口变为低电平则说明按键被按下,然后执行相应的指令。
图4.4 按键按下时电压的变化
从图4.4可以看出,理想波形与实际波形之间是有区别的,实际波形在按下和释放的瞬间都有抖动现象,抖动时间的长短和按键的机械特性有关,一般为5~10ms。通常我们手动按时都要加上去抖动操作,有专用的去抖动电路,也有专用的去抖动芯片,但通常我们软件延时的方法就能很容易解决抖动问题,而没有必要再添加多余的硬件电路。
图4.5 按键检测流程图
无论独立键盘还是矩阵键盘,单片机检测其是否被按下的依据都是一样的,也就是检测该键对应的I/O口是否为低电平。独立键盘有一端固定为低电平,单片机写程序检测时比较方便。而矩阵键盘两端都与单片机I/O口连接,因此在检测时需人为通过单片机I/O口送出低电平。检测时,先送一列为低电平,其余几列为高电平,然后立即轮流检测一次各行是否有低电平,若检测到某一行为低电平,就可以确定当前被按下的按键是哪一行哪一列的,用同样的方法轮流各列送一次低电平,再轮流检测一次各行是否变为低电平,这样即可检测完所有的按键。
图4.6 矩阵键盘按键电路图
4.1.4报警模块
报警模块的结构比较简单,只是一个蜂鸣器模块,当温度高于设定值较大时,单片机在I/O口上输入一个低电平,就可以使蜂鸣器报警。
图4.7报警电路
4.2温度采集电路
4.2.1单线数字温度计DSl8B20介绍
DSl8B20数字温度计提供9位(二进制)温度读数,指示器件的温度。信息经过单线接口送入 DSl8B20 或从 DSl8B20 送出,因此从主机 CPU 到 DSl8B20 仅需一条线(和地线)。DSl8B20 的电源可以由数据线本身提供而不需要外部电源。
因为每一个 DSl8B20 在出厂时已经给定了唯一的序号,因此任意多个 DSl8B20 可以存放在同一条单线总线上。这允许在许多不的地方放置温度敏感器件。
DSl8B20 的测量范围从-55℃到+125℃,增量值为0.5℃可在 l s(典型值)内把温度变换成数字。
每一个 DSl8B20 包括一个唯一的 64 位长的序号,序号值存放在 DSl8B20内部的 ROM(只读存贮器)中。开始8位是产品类型编码(DSl8B20 编码均为 10H) 接着的48位是每个器件唯一的序号。最后8位是前面56位的CRC(循环冗余校验)码。DSl8B20 中还有用于贮存测得的温度值的两个8位存贮器 RAM 编号为0 号和1号。如果温度为负(℃)则1号存贮器8位全为1,否则全为0。0号存贮器用于存温度值的补码,LSB(最低位)的“1”表示0.5℃。将存贮器中的二进制数求补再转换成十进制数并除以2就得到被测温度值(-55℃~125℃)。DSl8B20的引脚如图。每只DS18B20 都可以设置成两种供电方式即数据总线供电方式和外部供电方式采取数据总线供电方式可以节省一根导线,但完成温度测量的时间较长;采取外部供电方式则多用一根导线但测量速度较快。
图4.8
4.2.2温度计算
(1) DS18B20 用 9 位存贮温值度,最高位为符号位,下图为DS18B20 的温度存储方式,负温度S=1,正温度 S=0。例如:00AAH为+85℃,0032H为 25℃,FF92H 为-55℃。
图4.9
(2)DS18B20用 12 位存贮温值度,最高位为符号位,下图为 18b20 的温
度存储方式。负温度S=1,正温度 S=0。
图4.10
4.2.3 DS18B20工作过程及时序
DSl820 工作过程中的协议如下:初始化、ROM 操作命令、存储器操作命令、处理数据。
(1)初始化
单总线上的所有处理均从初始化开始
(2) ROM 操作品令
总线主机检测到 DSl820 的存在,便可以发出 ROM 操作命令之一。这些命令如:指令代码
Read ROM(读 ROM) [33H]
Match ROM(匹配 ROM) [55H]
Skip ROM(跳过 ROM] [CCH]
Search ROM(搜索 ROM) [F0H]
Alarm search(告警搜索) [ECH]
(3)存储器操作命令
指令代码
Write Scratchpad(写暂存存储器) [4EH]
Read Scratchpad(读暂存存储器) [BEH]
Copy Scratchpad(复制暂存存储器) [48H]
Convert Temperature(温度变换) [44H]
Recall EPROM(重新调出) [B8H]
Read Power supply(读电源) [B4H]
(4)时序
①初始化
时序见下图主机总线 to 时刻发送一复位脉冲(最短为 480us 的低电平信号),接着在 tl 时刻释放总线并进入接收状态, DSl820 在检测到总线的上升沿之后,等待 15-60us ,接着 DS1820 在 t2 时刻发出存在脉冲(低电平持续 60-240 us) 如图中虚线所示。
图4.11
②写时间隙
当主机总线 t o 时刻从高拉至低电平时就产生写时间隙下图。从 to 时刻开始15us 之内应将所需写的位送到总线上。DS18B20在t o后15-60us间对总线采样。若低电平,写入的位是 0;若高电平,写入的位是1。连续写 2 位间的间隙应大于 1us。
图4.12 写0时序图4.13 写1时序
③读时间隙
主机总线 to 时刻从高拉至低电平时,总线只须保持低电平 l 7ts,之后在 t1 时刻将总线拉高,产生读时间隙。读时间隙在 t1 时刻后 t 2 时刻前有效。t z 距 to 为15us,也就是说,t z 时刻前主机必须完成读位,并在 t o 后的60us 一 120 fzs 内释放总线。
4.3继电器电路设计
本系统采用单相固态继电器SSR/1P-10A,当单片机给继电器供5V电压时,继电器导通。可以通过这个原理将加热炉的电源线火线分别接入继电器两端,所以单片机的I/O口供给低电平,继电器就可以导通,这样就可以控制加热炉的加热了。
如图所示:
图4.14 继电器结构
由于考虑到单片机引脚的驱动能力可能不足,因此制作了驱动电路,放大驱动电流,并在继电器两端加上续流二极管保证加热时间够长。
电路如下:
图4.15 驱动电路
第五章系统软件设计
5.1主程序设计
为了更简单的完成温度控制的任务,采用如下算法控制继电器,程序的软件流程图如下:
图5.1 软件流程图
首先在程序的开头先读取用户的按键命令,当没有按键时,数码管仅显示实际温度;若按下“b”键,则数码管显示用户的设定温度;按下“c”键,则进入设置温度子程序,用户通过1~9数字键就可以设置用户所需温度,这样就完成了用户的操作。接下来读取DS18B20的数据,并按格式装配成数码管可以显示的类型。最后根据当前的温度值控制继电器的通断。主程序就是以上述流程往复运行。
5.2数码管显示程序
数码管显示段选码:
unsigned char code Seg_Table[13] = { 0xC0,/*0*/ 0xF9,/*1*/ 0xA4,/*2*/ 0xB0,/*3*/ 0x99,/*4*/ 0x92,/*5*/ 0x82,/*6*/ 0xF8,/*7*/
0x80,/*8*/ 0x90,/*9*/
0x9c,/*10*/ //上框代表实际温度 0xa3,/*11*/ //下框代表设定温度
0xff//all off
};
5.3键盘扫描程序
这里使用4×4矩阵键盘作为命令输入,采用行列赋值的方法分别确定按键的行值和列值。
图5.2 键盘扫描流程图
5.4 DS18B20通信程序
DS18B20测温原理为图5.3所示。低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号送给计数器1。高温度系数晶振随温度变化其振荡率明显改变,所产生的信号作为计数器2的脉冲输入。计数器1和温度寄存器被预置在-55℃所对应的一个基数值。计数器1对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值的累加,此时温度寄存器中的数值即为所测温度。斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。
转化后得到的12位数据,存储在18B20的两个8比特的RAM中,二进制中的前面5位是符号位,如果测得的温度大于0,这5位为0,只要将测到的数值乘以0.0625即可得到实
际温度;如果温度小于0,这5位为1,测到的数值需要取反加1再乘以0.0625即可得到实际温度。例如+125℃的数字输出为07D0H,+25.0625℃的数字输出为0191H,-25.0625℃的数字输出为FF6FH,-55℃的数字输出为FC90H 。
根据DS18B20的通讯协议,主机(单片机)控制DS18B20完成温度转换必须经过三个步骤:每一次读写之前都要对DS18B20进行复位操作,复位成功后发送一条ROM指令,最后发送RAM指令,这样才能对DS18B20进行预定的操作。复位要求主CPU将数据线下拉500微秒,然后释放,当DS18B20收到信号后等待16~60微秒左右,后发出60~240微秒的存在低脉冲,主CPU收到此信号表示复位成功。
图5.3 DS18B20流程图
第六章加热炉温控系统使用方法
6.1系统连接方法
实验箱的USB口连接电脑,用作5V电源输入,DS18B20的VCC和GND分别接UART 的VCC和GND;数据端口接UART的RX。这样单片机就可以读取DS18B20的温度数据了,但是为了准确的测量加热炉温度,还要将芯片贴于加热炉的杯壁上,这样可以大致准确地检测炉温。
然后是继电器的连接,先将电源线的火线断开,分别接在继电器220V的两个引脚上,再将继电器的控制端分别接在放大器驱动电路的集电极和地线上,而驱动电路用实验箱上的5V输出供电,最后将放大器的基级经由一个2K的电阻接入实验箱UART的TX端。这样,单片机就通过控制TX端的高低电平,控制继电器的开合。
6.2系统使用方法
程序烧写完毕以后,重新打开开关,数码管就可以显示当前的温度,按下键盘上的“*”号键,就可以使用0~9数字键设置温度(默认温度为50度)。按下“#”号键,可以查看用
户设定温度。按下“D”键,可以看到恒温时间(在距设定温度0.8°C的时候开始启动计时器)。加热炉的保温范围大致在设定温度上下0.5°C的范围内,当超过设定温度0.5°C 时,就会启动蜂鸣器报警。
第七章实验数据
实验结果良好,此系统和装置性能是符合要求的。
第八章总结
本文主要介绍基于STC12C5A60S2单片机的炉温控制设计流程,介绍了炉温控制方案以及各个主要模块的工作原理和设计思路。本文涉及温度传感器系统、继电器系统、显示系统、输入系统的设计。
由于系统的复杂性和硬件使用要求以及人力、时间等方面的制约,考虑到系统的实时性和运算能力,系统并没有采用复杂的处理算法和控制算法,一切以实用为主。对于温度控制算法还有待进一步的研究和改进。同时,在电路保护方面的设计有待进一步地学习和实践。
总结整个设计过程,不仅使我们得到了对已有知识进行实践的机会,更培养了一定的科研能力,拓宽了知识面。展望未来,计算机控制技术必将在更广阔的领域得到应用。
参考文献
【1】郭天祥. 《51单片机C语言教程》.北京.电子工业出版社.2008
【2】宏晶STC单片机官方网站.《STC12C5A60S2器件手册》.2010
【3】https://www.360docs.net/doc/721755891.html,等.《18B20温度传感器应用解析》.2007
附录A 系统程序代码
#define uchar unsigned char
#define DELAY_TIME1 8
sbit DQ=P3^0; //改成P3^0
void ds18b20_delay(int time)//延时时间为(time * 6 us)
{
int i,s,temp;
temp=time;
for(i=0;i { s=temp; while(s>0)s--; } } //*********************18B20复位函数*********************// void Init_DS18B20(void) { unsigned char x=1,j; DQ=1;//先将数据口拉高 for(j=0;j _nop_();_nop_();_nop_();//延时大约2us } while(x) //进行判断,当数据口返回一个0时,跳出循环。初始化成功{ DQ=0; //拉低 ds18b20_delay(80); //延时大约850us,晶振为11.0592 DQ=1; //拉高 ds18b20_delay(8); //延时50us if(DQ==1) //设置判断条件,看ds1820的返回值,0则跳出while循环x=1; else x=0; ds18b20_delay(40);//延时500us } } //*********************18B20写命令函数*********************// void WriteOneChar(uchar val) { uchar i,j; for (i = 8; i > 0; i--) //定义8 bit,写8 bit { DQ = 1; for(j=0;j {_nop_(); _nop_();} DQ = 0; for(j=0;j _nop_(); _nop_(); _nop_(); _nop_(); _nop_();//5us } DQ = val & 0x01; //最低位移出,并写入总线 ds18b20_delay(6); //66us val = val >> 1; //右移一位,倒数第二位变为最低位} DQ = 1; ds18b20_delay(1); //高电平维持11us,写结束 } //*********************18B20读1个字节函数*********************// uchar ReadOneChar(void) { uchar i,j; uchar value = 0; for (i = 8; i > 0; i--) { DQ = 1; for(j=0;j { _nop_(); _nop_(); } value >>= 1; //右移一位 DQ = 0; for(j=0;j { _nop_(); _nop_(); _nop_(); _nop_(); //4us } DQ = 1; for(j=0;j { _nop_(); _nop_(); _nop_(); _nop_(); //4us ,读时隙 } if (DQ) value |= 0x80; //DQ=1,则写入为10000000 ds18b20_delay(6); //66us } DQ = 1; return(value); } float ReadTemperature(void) { uchar n = 0; //存储符号 unsigned int t; uchar a,b; //*********************读出温度函数*********************// Init_DS18B20(); //总线复位 WriteOneChar(0xCC); // 发Skip ROM命令 WriteOneChar(0xBE); // 发读命令 a = ReadOneChar(); //温度低8位 b = ReadOneChar(); //温度高8位 Init_DS18B20(); WriteOneChar(0xCC); // Skip ROM WriteOneChar(0x44); // 发转换命令 t = (b << 8) + a; return (t*0.0625); } 键盘扫描程序 #include #include"shuma.h" extern unsigned char KeyCounter; extern bit KeyFlag; extern bit SetFlag; extern bit DisFlag; extern bit ShowTimeFlag; unsigned char code keycode[16]={ 0x77,0x7b,0x7d,0x7e, //1,2,3,A 0xb7,0xbb,0xbd,0xbe, //4,5,6,B 0xd7,0xdb,0xdd,0xde, //7,8,9,C 0xe7,0xeb,0xed,0xee, //*,0,#,D }; unsigned char Key_Scan() //返回的是keycode[]数组的位数{ unsigned char i,X,Y; unsigned char KeyCode; P2 = 0x0f; if(P2 != 0x0f) { Delay(500); if(P2 != 0x0f) { X = P2; P2 = 0xf0; if(P2 != 0xf0) { 成都理工大学工程技术学院《过程控制系统课程设计实验报告》 名称:单容水箱液位过程控制 班级:2011级自动化过程控制方向 姓名: 学号: 目录 前言 一.过程控制概述 (2) 二.THJ-2型高级过程控制实验装置 (3) 三.系统组成与工作原理 (5) (一)外部组成 (5) (二)输入模块ICP-7033和ICP-7024模块 (5) (三)其它模块和功能 (8) 四.调试过程 (9) (一)P调节 (9) (二)PI调节 (10) (三)PID调节 (11) 五.心得体会 (13) 前言 现代高等教育对高校大学生的实际动手能力、创新能力以及专业技能等方面提出了很高的要求,工程实训中心的建设应紧紧围绕这一思想进行。 首先工程实训首先应面向学生主体群,建设一个有较宽适应面的基础训练基地。通过对基础训练设施的 集中投入,面向全校相关专业,形成一定的规模优势,建立科学规范的训练和管理方法,使训练对象获得机械、 电子基本生产过程和生产工艺的认识,并具备一定的实践动手能力。 其次,工程实训的内容应一定程度地体现技术发展的时代特征。为了适应现代化工业技术综合性和多学科交叉的特点,工程实训的内容应充分体现机与电结合、技术与非技术因素结合,贯穿计算机技术应用,以适应科学技术高速发展的要求。应以一定的专项投入,建设多层次的综合训练基地,使不同的训练对象在获得对现代工业生产方式认识的同时,熟悉综合技术内容,初步建立起“大工程”的意识,受到工业工程和环境保护方面的训练,并具备一定的实用技能。 第三,以创新训练计划为主线,依靠必要的软硬件环境,建设创新教育基地。以产品的设计、制造、控制乃至管理为载体,把对学生的创新意识和创新能力的培养,贯穿于问题的观测和判断、创造和评价、建模和设计、仿真和建造的整个过程中。 过程控制系统课程设计 设计题目加热炉温度控制系统 学生姓名 专业班级自动化 学号 指导老师 2010年12月31日 目录 第1章设计的目的和意义 (2) 第2章控制系统工艺流程及控制要求 (2) 2.1 生产工艺介绍 2.2 控制要求 第3章总体设计方案 (3) 3.1 系统控制方案 3.2 系统结构和控制流程图 第4章控制系统设计 (5) 4.1 系统控制参数确定 4.2 PID调节器设计 第5章控制仪表的选型和配置 (7) 5.1 检测元件 5.2 变送器 5.3 调节器 5.4 执行器 第6章系统控制接线图 (13) 第7章元件清单 (13) 第8章收获和体会 (14) 参考文献 第1章设计的目的和意义 电加热炉被广泛应用于工业生产和科学研究中。由于这类对象使用方便,可以通过调节输出功率来控制温度,进而得到较好的控制性能,故在冶金、机械、化工等领域中得到了广泛的应用。 在一些工业过程控制中,工业加热炉是关键部件,炉温控制精度及其工作稳定 性已成为产品质量的决定性因素。对于工业控制过程,PID 调节器具有原理简单、使用方便、稳定可靠、无静差等优点,因此在控制理论和技术飞跃发展的今天,它在工业控制领域仍具有强大的生命力。 在产品的工艺加工过程中,温度有时对产品质量的影响很大,温度检测和控制是十分重要的,这就需要对加热介质的温度进行连续的测量和控制。 在冶金工业中,加热炉内的温度控制直接关系到所冶炼金属的产品质量的好坏,温度控制不好,将给企业带来不可弥补的损失。为此,可靠的温度的监控在工业中是十分必要的。 这里,给出了一种简单的温度控制系统的实现方案。 第2章控制系统工艺流程及控制要求 2.1 生产工艺介绍 加热炉是石油化工、发电等工业过程必不可少的重要动力设备,它所产生的高压蒸汽既可作为驱动透平的动力源,又可作为精馏、干燥、反应、加热等过程的热源。随着工业生产规模的不断扩大,作为动力和热源的过滤,也向着大容量、高参数、高效率的方向发展。 加热炉设备根据用途、燃料性质、压力高低等有多种类型和称呼,工艺流程多种多样,常用的加热炉设备的蒸汽发生系统是由给水泵、给水控制阀、省煤器、汽包及循环管等组成。 本加热炉环节中,燃料与空气按照一定比例送入加热炉燃烧室燃烧,生成的热量传递给物料。物料被加热后,温度达到生产要求后,进入下一个工艺环节。 加热炉设备主要工艺流程图如图2-1所示。 目录 第一章引言..................................................... - 2 - 1.1 虚拟仪器技术............................................ - 2 - 1.2 CAT技术在液压测试系统中的应用.......................... - 3 - 1.3 本课题研究目的和意义.................................... - 3 - 1.4 课题提出及研究方案...................................... - 4 - 第二章电液伺服阀特性........................................... - 5 - 2.1电液伺服阀的组成......................................... - 5 - 2.1.1 电气—机械转换器................................... - 5 - 2.1.2 液压放大器......................................... - 6 - 2.1.3 检测反馈装置....................................... - 6 - 2.1.4 伺服阀的特性及测试原理............................. - 6 - 2.2伺服阀的静态特性......................................... - 6 - 2.2.1负载流量特性曲线................................... - 7 - 2.2.2空载流量特性曲线................................... - 8 - 2.2.3压力特性........................................... - 9 - 2.2.4静耗流量特性(泄特性)............................. - 9 - 2.3本章小结................................................ - 10 - 第三章测试系统硬件设计........................................ - 11 - 3.1传感器.................................................. - 12 - 3.1.1 压力传感器的选型.................................. - 13 - 3.1.2 温度传感器选型.................................... - 15 - 3.1.3 直线位移传感器.................................... - 17 - 3.1.4 线速度传感器...................................... - 18 - 3.2信号放大................................................ - 19 - 3.3流量计.................................................. - 20 - 3.4数据采集设备............................................ - 21 - 3.4.1 数据采集卡的基本性能指标.......................... - 21 - 3.4.2数据采集卡选型.................................... - 22 - 3.5本章小结................................................ - 23 - 第四章基于LabVIEW的伺服阀静态特性测试........................ - 24 - 4.1 面向仪器和测控过程的图形化开发平台-LabVIEW ............. - 24 - 4.1.1 LabVIEW简述...................................... - 24 - 4.1.2 LabVIEW的特点.................................... - 25 - 4.1.3 LabVIEW的仪器驱动程序............................ - 25 - 4.2用LabVIEW进行数据分析和处理............................ - 26 - 4.2.1加窗处理.......................................... - 26 - 4.2.2数字滤波器........................................ - 27 - 4.2.3频域转换.......................................... - 28 - 4.3静态测试系统软件及编程.................................. - 29 - 4.3.1用LabVIEW设计虚拟仪器的方法...................... - 30 - 4.3.2信号激励模块...................................... - 32 - H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:自动控制理论课程设计 设计题目:直线一级倒立摆控制器设计 院系:电气学院电气工程系 班级: 设计者: 学号: 指导教师: 设计时间:2016.6.6-2016.6.19 手机: 工业大学教务处 *注:此任务书由课程设计指导教师填写。 直线一级倒立摆控制器设计 摘要:采用牛顿—欧拉方法建立了直线一级倒立摆系统的数学模型。采用MATLAB 分析了系统开环时倒立摆的不稳定性,运用根轨迹法设计了控制器,增加了系统的零极点以保证系统稳定。采用固高科技所提供的控制器程序在MATLAB中进行仿真分析,将电脑与倒立摆连接进行实时控制。在MATLAB中分析了系统的动态响应与稳态指标,检验了自动控制理论的正确性和实用性。 0.引言 摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆。许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证我们所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。 本次课程设计中以一阶倒立摆为被控对象,了解了用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB仿真软件的使用方法及控制系统的调试方法。 1.系统建模 一级倒立摆系统结构示意图和系统框图如下。其基本的工作过程是光电码盘1采集伺服小车的速度、位移信号并反馈给伺服和运动控制卡,光电码盘2采集摆杆的角度、角速度信号并反馈给运动控制卡,计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带带动小车运动从而保持摆杆平衡。 图1 一级倒立摆结构示意图 天津渤海职业技术学院 毕业设计说明书 专业电气自动化 课题名称液压传动装置电气控制系统的设计学生蕊蕊 指导老师秦立芳利 电气工程系 2009年3月 容摘要 液压传动是用液体作为工作介质来传递能量和进行控制的传动方式。液压系统利用液压泵将原动机的机械能转换为液体的压力能,通过液体压力能的变化来传递能量,经过各种控制阀和管路的传递,借助于液压执行元件(缸或马达)把液体压力能转换为机械能,从而驱动工作机构,实现直线往复运动和回转运动而进行能量传递的一种传动方式。由于液压执行结构尺寸小,反应速度快,调节性能好,传递的力和扭矩较大,操纵、控制、调节比较方便,容易实现功率放大和过载保护,因此被广泛应用于机械制造、冶金、工程机械、农业、汽车、航空、船舶、轻纺等行业。近年来,又被应用于太空跟踪系统,海浪模拟装置,宇航环境模拟火箭发射助飞装置。 在机械加工中,例如组合机床加工长孔,为满足其技术要求并达到相应的自动化水平,加工前,应按工艺工程进行可行性模拟加工试验。本方案即为满足液压试验装置设计电气控制和自动控制。 本课题属于典型的机电技术结合项目,通过对课题的设计,研究和制作过程可达到综合利用自动化专业理论知识,提高专业综合操作技能,提高分析、组织能力,拓展学科领域的目的,并为机械加工生产技术改革提供试验操作平台。 常用词;液压装置、电器控制、PLC可编程控制器 致谢: 在本次毕业设计过程中得到了众多老师的帮助,在此表示忠心的感谢!同时也感谢这三 年来在学习和生活上给予帮助的所有老师! 目录 第1章设计对象及基本要求 (4) 1.1 设计对象 1.2 基本要求 1.3 技术要求 第2章电气线路的设计 (5) 2.1 线路设计的基本原理 2.2 绘制原理图 2.3 元器件的选择 2.4 元器件的分布图 第3章柜体电气线路的安全 (11) 第4章电气控制柜的通电试验 (15) 4.1 通电前的检查 4.2 电气控制柜的调试 第5章按给定实验项目进行的调试 (15) 5.1 用PLC可编程控制项目进行编程设计 第6章使用说明书 (18) 第7章结果分析 (18) 参考文献 (19) 计算机控制课程设计 报告 设计题目:电阻炉温度控制系统设计 年级专业:09级测控技术与仪器 化工、机械、食品等领域。温度控制是工业生产过程中经常遇到的过程控制,有些工艺过程对其温度的控制效果直接影响着产品的质量。因而设计一种较为理想的温度控制系统是非常有价值的。本设计就是利用单片机来控制高温加热炉的温度,传统的以普通双向晶闸管(SCR)控制的高温电加热炉采用移相触发电路改变晶闸管导通角的大小来调节输出功率,达到自动控制电加热炉温度的目的。这种移相方式输出一种非正弦波,实践表明这种控制方式产 生相当大的中频干扰,并通过电网传输,给电力系统造成“公害”。采用固态继电器控温电路,通过单片机控制固态继电器,其波形为完整的正弦波,是一种稳定、可靠、较先进的控制方法。为了降低成本和保证较高的控温精度,采用普通的ADC0809芯片和具有零点迁移、冷端补偿功能的温度变送器桥路,使实际测温范围缩小。 1.1电阻炉组成及其加热方式 电阻炉是工业炉的一种,是利用电流通过电热体元件将电能转化为热能来加热或者熔化元件或物料的热加工设备。电阻炉由炉体、电气控制系统和辅助系统组成,炉体由炉壳、加热器、炉衬(包括隔热屏)等部件组成。由于炉子的种类不同,因而所使用的燃料和加 热方法也不同;由于工艺不同,所要求的温度高低不同,因而所采用的测温元件和测温方法也不同;产品工艺不同,对控温精度要求不同,因而控制系统的组成也不相同。电气控制系统包括主机与外围电路、仪表显示等。辅助系统通常指传动系统、真空系统、冷却系统等,因炉种的不同而各异。电阻炉的类型根据其热量产生的方式不同,可分为间接加热式和直接加热式两大类。间接加热式电阻炉,就是在炉子内部有专用的电阻材料制作的加热元件, (4)电阻炉温度按预定的规律变化,超调量应尽可能小,且具有良好的稳定性; (5)具有温度、曲线自动显示和打印功能,显示精度为±1℃; (6)具有报警、参数设定、温度曲线修改设置等功能。 大学生电子设计竞赛 风力摆控制系统 学院: 计算机学院 项目:风力摆控制系统 负责人:王贤朝 指导老师:张保定 时间: 2017年5月20日 摘要 本系统采用K60开发板作为控制中心,与万向节、摆杆、直流风机(无刷 电机+扇叶)、激光头、反馈装置一起构成摆杆运动状态与风机速度分配的双闭 环调速系统。单片机输出可变的PWM波给电机调速器,控制4个方向上风机的风速,从而产生大小不同的力。利用加速度计模块MPU6050,准确测出摆杆移动的位置与中心点位置之间的关系,采样后反馈给单片机,使风机及时矫正,防止脱离运动轨迹。使用指南针模块判别方向,控制系统向指定方向偏移。控制方式采用PID算法,比例环节进行快速响应,积分环节实现无静差,微分环节减小超调,加快动态响应。从而使该系统具有良好的性能,能很好地实现自由摆运动、快速制动静止、画圆、指定方向偏移,具有很好地稳定性。 关键词:K60、空心杯电机、MPU6050、PID、无线蓝牙 目录 一、系统方案.............................................. 1.1 系统基本方案...................................... 1.1.1 控制方案设计................................ 1.1.2 机械结构方案设计............................ 1.2 各部分方案选择与论证 (1) 1.2.1电机选择 (1) 1.2.2 电机驱动的选择.............................. 1.2.3 摆杆与横杆的连接选择........................ 毕业设计(论文) 摘要 随着电子技术的飞速发展,单片机在国民经济生产各行业发挥了重要的作用。它因为集成度高、体积小、运行可靠、应用灵活、价格低、面向控制等特点得到了广大工程技术人员和客户的好评。在温度控制方面,单片机能够代替常规的模拟调节器。本文主要设计了单片机炉温控制系统硬件电路和软件程序。系统具工作可靠、实时性强等特点,满足控制精度的要求。本着在满足系统性能要求的前提下,尽可能的减少硬件成本。本文主要涉及到控制系统的硬件设计和单片机的控制软件编程。本系统选用AD590对炉温进行检测,并且选用 OP07低漂移高精度前置放大器,对信号进行放大。在PCF8951完成数模转换之后,8051单片机对数据进行处理。采用分段方法控制三台电阻炉温度。人机接口电路部分能实现温度设定、温度显示、超温报警等功能。本设计对温度的调节时间不做说明。本文重点介绍硬件的选取与接口电路的设计、模拟量输入通道和开关量输出通道的设计以及相应算法的软件程序编程。 关键词:单片机;炉温控制;接口电路; 30 毕业设计(论文) Abstract With the rapid development of electronic technology,Single-chip production of various sectors in the national economy played an important role. It is because of the high integration, small volume, reliable operation, flexible, low price and application for control of the engineering characteristics of technical staff and customers. In temperature control, SCM can replace conventional analog regulator.This paper designs the temperature control system of microcontroller hardware circuit and software program. With reliable work, real-time system as the control accuracy requirements. Based on system performance requirements in the premise, reduce cost of hardware. This paper involves controlling system of hardware design and the SCM control software programming. This system choose AD590 thermocouple to test temperature and choose OP07 low drift of preamplifier to a mplifiy signal. In PCF8591 complete digital-to-analog 8051 single chip microcomputer, after processing of data. Segmentation control algorithm of three resistance furnace temperature. Can realize human-machine interface circuit of the temperature setting, temperature display, and overtemperature alarm etc. The design of temperature regulation time to do that. This paper introduces the hardware design of interface circuit and analog input channel, and channel of switching output corresponding algorithm and the design of software programming. Key words: SCM, Temperature control, Interface circuit, 30 目录 第1章引言 (3) 1.1 课题背景及研究意义 (3) 1.2 计算机在热处理炉炉温控制中的应用 (3) 第2章系统硬件设计 (8) 2.1温度检测及变送器 (8) 2.2控制机构 (9) 2.3 A/D转换电路 (10) 2.4 温度控制电路 (14) 2.5 部分接口电路 (16) 第3章温度控制的算法和程序 (18) 3.1 温度控制的算法 (18) 3.2 温度控制的程序 (20) 第4章对于抗干扰的探究 (34) 4.1 抗干扰的措施 (34) 结束语 (35) 致谢 (36) 参考文献 (37) 附录1 电路图 (38) 附录2 英文专业文摘及翻译 (39) 基于单片机的电阻炉温度控制系统设计 摘要:主要以51系列单片机为核心对电阻炉炉温进行控制,使其温度稳定在某一个值上。最高温度为1000℃,并且有键盘输入给定温度值,由LED数码管显示温度值的功能. 关键词:单片机;电阻炉;温度控制 The design of temperature control system of the resistance furnace based on single chip microcomputer Abstract: Mainly with 51 series single chip microcomputer for the unit of nucleus heats to the control of The resistance furnace, the tallest temperature is 1000℃. And the temperature of keyboard input is constant, LED digitron displays the function of temperature point. Key words: single chip microcomputer;the resistance furnace; temperature control system 过程控制系统综合设计报告 班级: 姓名: 学号: 学期: 一、实验目的与要求 1.掌握DDC控制特点; 2.熟悉CS4100实验装置,掌握液位控制系统和温度控制系统构成; 3.熟悉智能仪表参数调整方法及各参数含义; 4.掌握由CS4100实验装置设计流量比值控制、液位串接控制、液位前馈反馈控制及四水箱解耦控制等设计方法; 5.掌握实验测定法建模,并以纯滞后水箱温度控制系统作为工程案例,掌握纯滞后水箱温度控制系统的建模,并用DDC控制方案完成控制算法的设计及系统调试。 以水箱流量比值控制、水箱液位串接控制、水箱液位前馈反馈控制及四水箱解耦控制为被被控对象,完成系统管路设计、电气线路设计、控制方案确定、系统调试、调试结果分析等过程的训练。以纯滞后水箱作为被控对象,以第二个水箱长滞后温度作为被控量,完成从实验测定法模型建立、管路设计、线路设计、控制方案确定、系统调试、结果分析等过程的训练。 具体要求为: 1)检索资料,熟悉传感器、执行器机械结构及工作原理。 2)熟悉CS4100过控实验装置的机械结构,进行管路设计及硬件接线; 3)掌握纯滞后水箱温度控制系统数学模型的建立方法,并建立数学模型; 4)掌握智能仪表参数调节方法; 5)进行控制方案设计,结合具体数学模型,计算系统所能达到性能指标,并通过仿真掌握控制参数的整定方法; 6)掌握系统联调的步骤方法,调试参数的记录方法,动态曲线的测定记录方法。记录实验数据,采用数值处理方法和相关软件对实验数据进行处理并加以分析,记录实验曲线,与理论分析结果对比,得出有意义的结论。 7)撰写实验设计报告、实验报告,具体要求见:(五)实践报告的内容与要求。 二、实验仪器设备与器件 1.CS4100过程控制实验装置 2.PC机(组态软件) 3.P909智能仪表若干 基于单片机的炉温自动控制系统设计 摘要:在工农业生产中,温度是工业生产对象中主要的被控参数之一。电阻炉是通过电流流过电阻体产生热量来加热或熔化物料的一种电炉。电阻炉广泛地应用在化工、冶金等行业。它对温度控制的要求较高,温度控制的好坏直接影响着产品质量及生产效率,因此电阻炉的温度控制在科学研究、工业生产中具有重要的意义。 本设计采用单片机作为数据处理与控制单元,以电阻炉作为控制对象,用热电偶作为测量元件,用晶闸管作为输出控制元件来实现对电阻炉温度自动控制。该系统利用K型热电偶温度传感器,把检测到的电阻炉温度的信号送入MAX6675芯片,经过信号放大等一系列转换后,再将信号送到单片机STC89C52内进行PID运算,同时可以通过键盘调节PID参数。经PID运算后,比例调节输出量改变晶闸管控制量,变晶闸管的导通角,从而控制电阻炉的加热强度。从而控制电阻炉的炉温。 关键词:电阻炉;MAX6675;单片机STC89C52;PID控制 Abstract:SummaryIn the industrial and agricultural production , the temperature is accused of one of the main objects of industrial production parameters . Furnace current flowing through the resistor generates heat to a furnace for heating or melting the material . Resistance furnace is widely used in chemical, metallurgical and other industries. It requires a higher temperature control , temperature control has a direct impact on product quality and production efficiency , and therefore resistance furnace temperature control is of great significance in scientific research , industrial production. The design uses a single chip for data processing and control unit to resistance furnace as a control object , as the measuring element with thermocouple with thyristor as a control element to achieve the output resistance furnace temperature control . The system uses K -type thermocouple temperature sensor , to detect resistance furnace temperature signal into the MAX6675 chip , after a series of converted signal is amplified and then signal to the microcontroller STC89C52 PID operation , and can adjust the keyboard PID parameters. After the PID operation , adjust the output volume ratio of the amount of change in thyristor controlled , variable thyristor conduction angle, so as to control the intensity of the resistance heating furnace . To control the furnace temperature resistance furnace . Key words:The resistance furnace; MAX6675; SCM STC89C52; PID contro 目录 新疆大学 实习(实训)报告 实习(实训)名称:电气控制与PLC综合实践 学院:新疆大学科学技术学院 专业、班级:电气12-1班 指导教师:努尔哈孜·朱玛力 报告人:郜志强 学号:20112450079 时间:2015年6月19日--7月3日 1设计部分 设计题目:车床液压系统自动机床控制系统设计 在机械工业中,传统普通车床仍占有相当比例,其中部分车床采用液压系统来控制刀具的自动切换,机床电气控制部分多应用继电器——接触器控制来实现,这类系统元器件多,体积大,连线复杂,可靠性和可维护性低,故障率高,工作效率低,而随着计算机技术、电子技术等的发展,计算机控制技术在液压传动控制中也得到了广泛的应用。以计算机技术为核心的PLC(可编程序控制器)具有抗干扰性强,运行可靠等诸多优点在工业自动化领域已被广泛应用。本文即是利用PLC控制技术,对传统液压回路进行系统控制设计,变传统电气控制为PLC 控制。 1.1车床液压控制回路的液压元件构成 此车床液压控制回路主要由以下原件组成:左夹紧液压缸用于夹紧工件和卸下工件,中横向进给液压缸带动刀具横向进给,右纵向进给液压缸带动刀具纵向进给,6个电磁换向阀控制进给液压缸的前进与后退,2个调速阀控制进给液压缸进给速度,双联泵提供液压油输出,另外采用3个单向阀控制液压油流动方向,减压阀和压力继电器监控夹紧缸的油压。 1.2 车床液压控制回路的工作原理 液压控制回路如图1所示,其作用主要是能够控制车床完成完整的切削加工过程,并且工作一个循环,分为8个步聚:1、装件夹紧;2、横快进;3、横工进;4、纵工进;5、横快退;6、纵快退;7、卸下工件;8、原位停止;各步骤的切换分别由行程开关SQ1、SQ2、SQ3、SQ4、SQ5、SQ6、SQ7控制,具体工作循环如图2所示。行程开关用于控制液压回路中6个电磁换向阀电磁铁的通电与否,进而改变液压油流向,影响液压缸实现动作顺序,完成切削过程。断电情况如表1所示。 摘要 电阻炉作为工业炉窑中的一种常用的加热设备被广泛的应用于工业生产中。对电阻炉温度控制精确与否将直接影像到产品的质量和生产效率。电阻炉是一种具有纯滞后的大惯性系统,开关炉门,加热材料,环境温度以及电网电压等都影像控制过程,传统的电阻炉控制系统大多建立在一定的模型基础上,难以保证加热要求。本文将PID控制算法引入到传统的电阻炉控制系统中,借此提高其控制效果。设计一个控制精度高,运行稳定的电阻炉温度控制系统是很有必要的。 本设计是以电阻炉温度为被控对象,单片机为核心的一种控制系统。其中以K型热电偶作为温度传感器。AT89c51单片机为控制核心,PID运算规律作为控制算法。文化中详细介绍了该控制系统的硬件电路设计。软件电路设计及PID控制算法。 在对电阻炉温度控制系统的研究之后,本设计主要完成温度控制系统的总体方案设计,硬件原理图的绘制,信号调理电路的设计,固态继电器的应用及温度控制电路的设计同时也完成了系统程序设计,并通过软件完成了对温度的控制功能。 关键词:电阻炉温度控制PID算法单片机 The Design of Temperature Control System of Resistance Furnace Abstract Resistance furnace was widely used in industrial production,the effect of the temperature control of Resistance furnace has a direct impact on product quality and productivity. Therefore, the design of high-precision control and stable operation of the resistance furnace temperature control system has a high application value. In this design, the resistance furnace as a controlled object,singlechip as the design of a control unit. Which type of thermocouple temperature sensor as K,AT89c51 microcontroller as control core and PID control algorithm for operation rule, This paper introduces the control system of the hardware circuit, software design and the PID control algorithm. On the resistance furnace temperature control system, the design of the main completed the overall scheme of the temperature control system design, hardware circuit principle diagram, the signal of the temperature contral circuit design of the system ,meanwhile finish the program design, through the software control to complete the function of temperature control. Key words:The resistance furnace Temperature control PID control Single-chip microcomp 目录 1.原理电路的设计 (1) 1.1总体方案设计 (1) 1.1.1简单原理叙述 (1) 1.1.2设计方案选择 (1) 1.2单元电路的设计 (3) 1.2.1温度信号的采集与转化单元——温度传感器 (3) 1.2.2电压信号的处理单元——运算放大器 (4) 1.2.3电压表征温度单元 (5) 1.2.4电压控制单元——迟滞比较器 (6) 1.2.5驱动单元——继电器 (7) 1.2.6 制冷部分——Tec半导体制冷片 (8) 1.3完整电路图 (10) 2.仿真结果分析 (11) 3 实物展示 (13) 3.1 实物焊接效果图 (13) 3.2 实物性能测试数据 (14) 3.2.1制冷测试 (14) 3.2.2制热测试 (18) 3.3.3性能测试数据分析 (20) 4总结、收获与体会 (21) 附录一元件清单 (22) 附录二参考文献. (23) 摘要 本课程设计以温度传感器LM35、运算放大器UA741、NE5532P及电压比较器LM339N 为电路系统的主要组成元件,扩展适当的接口电路,制作一个温度控制系统,通过室温的变化和改变设定的温度,来改变电压传感器上两个输入端电压的大小,通过三极管开关电路控制继电器的通断,来控制Tec制冷片的工作。这样循环往复执行这样一个周期性的动作,从而把温度控制在一定范围内。学会查询文献资料,撰写论文的方法,并提交课程设计报告和实验成品。 关键词:温度;测量;控制。 Abstract This course is designed to a temperature sensor LM35, an operational amplifier UA741, NE5532P and a voltage comparator LM339N circuit system of the main components. Extending the appropriate interface circuit, make a temperature control system. By changing the temperature changes and set the temperature to change the size of the two input ends of the voltage on the voltage sensor, an audion tube switch circuit to control the on-off relay to control Tec cooling piece work. This cycle of performing such a periodic motion, thus controlling the temperature in a certain range. Learn to query the literature, writing papers, and submitted to the curriculum design report and experimental products. Key words: temperature ; measure ;control 1 液压缸选型 四足机器人大腿上的液压缸所受的推力较大,而小腿上的液压缸所受的推力较小,而且,4个大腿上的液压缸所受的最大推力接近,4个小腿上的液压缸所受的最大推力也接近。因而,在设计液压缸时,大腿上的液压缸设计成相同尺寸,小腿上的液压缸设计成相同尺寸。 而四足机器人髋上的液压缸仅在四足机器人受到横向冲击的情况下工作。根据仿真结果可知,髋上的4个液压缸所受到的最大推力为 1.8kN,最大速度为130mm/s。由于髋上的液压缸推力和速度比大腿与小腿上的液压缸推力和速度小很多,在设计时,总流量主要考虑大腿和小腿上液压缸的叠加,髋上的液压缸流量由蓄能器供给。 根据仿真计算结果图,大腿上的液压缸所受最大推力取8kN,小腿上的液压缸所受的最大推力取4kN,即液压系统的最大载荷为8kN。查阅《液压工程师技术手册》如下表所示, 当载荷为5~10kN时,工作压力宜取1.5~2MPa,为了使液压控制系统的动态性能更好,同时使机械结构更紧凑,取液压缸的负载压力为6MPa。 液压缸暂定交由常州恒力液压有限公司生产。 1.1 大腿上的液压缸 大腿上的液压缸设计成相同尺寸,该液压缸的最大负载压力为P Lm=6MPa,所受最大负载推力为F m=8kN。 P1A1?P2A2=F 其中,P1——液压缸无杆腔压力; P2——液压缸有杆腔压力; D2; A1——液压缸无杆腔有效面积,A1=π 4 (D2?d2); A1——液压缸无杆腔有效面积,A2=π 4 F——负载推力; 液压缸负载压力F满足: P Lm=F m A1 =P1?P2 A2 A1 =6MPa 由上式可以得到 A1=F m P Lm = 8000 6 mm2=1333.3mm2 所以, D=4A1 π = 4×1333.3 π =41.2mm 圆整后取D=40mm。 查阅《液压工程师技术手册》如下表所示, 取d=25mm。根据仿真结果,液压缸行程大于70mm即可。液压缸和伺服阀组合成的液压包外形图按照之前设计的电动缸伺服电机外形图设计。 1.2 小腿上的液压缸 小腿上的液压缸设计成相同尺寸,该液压缸的最大负载压力也为P Lm=6MPa,所受最大负载推力为F m=4kN。 P1A1?P2A2=F 其中,P1——液压缸无杆腔压力; P2——液压缸有杆腔压力; A1——液压缸无杆腔有效面积,A1=π 4 D2; A1——液压缸无杆腔有效面积,A2=π 4 (D2?d2); F——负载推力; 液压缸负载压力F满足: P Lm=F m 1 =P1?P2 A2 1 =6MPa 由上式可以得到 A1=F m Lm = 4000 mm2=666.6mm2 所以,过程控制系统课程设计报告报告实验报告
加热炉温度控制系统设计
液压控制系统设计说明
自动控制系统课程设计报告说明书
液压传动装置电气控制系统的设计说明
计算机控制课程设计电阻炉温度控制系统
风力摆控制系统设计报告
炉温控制系统软硬件设计
基于单片机的电阻炉炉温控制系统
过程控制系统综合设计报告
基于单片机的炉温控制系统设计毕业设计
车床液压系统自动机床控制系统设计
电阻炉炉温控制系统的研制
模电课设—温度控制系统的设计
液压控制系统设计