基于MATLAB的遥感图像恢复研究
第34卷增刊
2009年10月
测绘科学
Science of Surveying and M app ing
Vol 134Supp l
Oct 1
作者简介:柏春岚(19782),女,山东
莒县人,硕士毕业,研究方向为遥感图像处理及其应用。E 2mail:bcl02008@hncj 1edu 1cn 收稿日期:2009205218
基于M AT LAB 的遥感图像恢复研究
柏春岚,王 洒
(河南城建学院测绘与城市空间信息系,河南平顶山 467044)
【摘 要】本文主要研究遥感图像恢复。建立遥感图像的退化模型,分析遥感图像恢复方法,主要有非约束还原
和约束还原。在此基础上,采用Lucy 2R ichards on 与维纳滤波方法进行遥感图像恢复结果分析与比较。结果表明,Lucy 2R ichards on 方法对遥感图像恢复能够较清晰反映实际图像。【关键词】图像恢复;遥感图像;非约束还原;约束还原;MAT LAB 【中图分类号】TP751 【文献标识码】A 【文章编号】100922307(2009)0820130203
1 引言
遥感图像反映了地球表面物体反射的光谱信息,还包含了丰富的空间结构信息。对遥感图像的处理与分析,一直是遥感工作者研究的热点。图像处理是对图像进行各种加工以改善图像的视觉效果,提高遥感图像的判读精度,并为自动识别打基础。图像恢复是其中一个重要的方面。图像恢复在图像处理领域非常重要,与图像增强等其他基本图像处理一样,也是以获取视觉质量某种程度的改善为目的,所不同的是图像恢复过程实际上是一估计过程,需要根据指定的图像退化模型,对其图像进行恢复,以获取原始图像[123]。随着科学技术的发展,出现了很多种图像复原方法,如逆滤波、维纳滤波、约束最小平方滤波等。
2 遥感图像恢复
211 图像恢复理论
遥感图像的获取、传输以及记录保存过程要经过目标、大气、光学系统、电子信号传输等一系列环节。在这些环节中,大气状况、摄像设备中光学系统的绕射和像差、成像设备与物体之间的相对运动以及摄像扫描的非线性等因素所引起的几何失真,都难免会造成图像的畸变和失真等图像质量的下降,被称为图像退化。图像退化的典型表现是图像出现模糊、失真以及附加噪声等。由于图像的退化,在图像接收端显示的图像已不再是传输的原始图像,图像效果明显变差。为较好地显示图像,必须对退化的图像进行处理,恢复出真实的原始图像,这一过程就称为图像恢复[229]。
图像恢复过程中首先要对图像建立退化模型,如图1;然后根据所建立的退化模型中的退化图像g (x,y )、考虑退化因素的系统函数h (x,y )以及有关噪声模型n (x,y )来对原始图像进行估计;最后估计出的图像尽可能接近真实图像f (x,y )。
图1 图像退化模型
退化模型函数根据上图可表示为:
g (x,y )=f (x,y )×h (x,y )+n (x,y )
(1)但是在实际中,处理的都是数字图像,对上式要进行离散化表示为:
g (x,y )=
∑M -1m =0∑N -1
n =0
f (m ,n )
×h (x -m ,y -n )+n (x,y )
(2)
式中,x =0,1,2,…,M -1,y =0,1,2,…,N -1。函数f (x,y )和h (x,y )分别是周期为M 和N 的函数,如果不是,必须对其补零延拓,以避免卷积周期的重叠。212 图像恢复方法
图像恢复的方法很多,但目前没有统一的分类标准,大都是根据不同的应用物理环境,采用了不同的退化模型、处理技巧和估计推则,从而得到了不同的恢复方法。本文只采用非约束还原和约束还原两种方法对遥感图像进行恢复[7~9]。
1)非约束还原
噪声模型函数在未知情况下,寻找原始函数的估计函数使其与考虑退化因素的系统函数乘积在最小均方差条件下最接近退化函数,使噪声模型函数的范数最小,则:
‖n ‖=n T n =‖g -H^f ‖2=(g -H^f )T
(g -H^f )(3) 式中,原始函数f 的估计函数。
令:
L ( f )=‖g -H^f ‖
(4) 求L 取极小值。从中求取原始函数f 的估计函数的微分就可以得到恢复公式,此称无约束恢复,即:
^f =H -1
g
(5) 2)约束还原
图像处理要求满足某条件,如公式(4)求解需要使用拉格朗日乘法,令Q 为f 的约束算子,寻找一个最优估计,即求解:
L ( f )=‖Q^f ‖2+λ(‖g -H f ‖-‖n ‖2
)
(6)^f =(H T
H +1λ
Q T Q )-1H T g
(7) 此方法为约束恢复。
3 遥感图像恢复分析
311 M AT LAB 介绍
MAT LAB 在图像处理中应用是由一系列支持图像处理的操作函数组成,如几何操作、区域操作和块操作、滤波、变换、图像分割、图像边缘提取、图像增强、图像恢复等,因此为便于应用在该软件中形成图像处理工具包。图像处理工具包的函数种类很多:图像显示、图像文件输入与输出、几何操作、像素值统计、图像分析与增强、图像滤波、图像变换、图像类型转换以及图像恢复等。该工具包与其他一样,使用者可以根据自行需要编写函数,用来满足特
增刊 柏春岚等 基于MAT LAB 的遥感图像恢复研究定的需求。312 图像恢复分析
遥感图像的处理和分析一般可用算法的形式描述,而大多数的算法可用软件实现,只有在为了提高速度或克服通用计算机限制的情况下才用特别的硬件。由于MAT LAB 软件具有强大的图形处理功能,而且软件操作简便。本文以某遥感图像为例进行分析。31211 非约速还原
遥感图像恢复方法有很多,目前常用的非约束还原方法有Lucy 2R ichards on 恢复和盲解卷积恢复。本文以Lucy 2R ichards on 恢复方法为例进行遥感图像分析。
1)编程
I =i m read (’F 1JPG’
); %读入图像subp l ot (2,2,1);i m show (I );
title (’原始图像’
);axis square;
LE N1=30;T HET A1=10;PSF =fs pecial (’m oti on’,LE N1,THET A1); %产生运动模糊的PSF
I 1=i m filter (I,PSF,’circular’,’conv’
);subp l ot (2,2,2);i m show (I 1);
title (’模糊后的图像’
);axis square;
noise =0113randn (size (I )); %设置噪声I 1noise =i m add (I 1,i m 2uint8(noise ));%加噪声
subp l ot (2,2,3);i m show (I 1noise );
title (’模糊加噪后的图像’
);luc1=deconvlucy (I 1noise,PSF,10); %Lucy 2R ich 2ards on 恢复
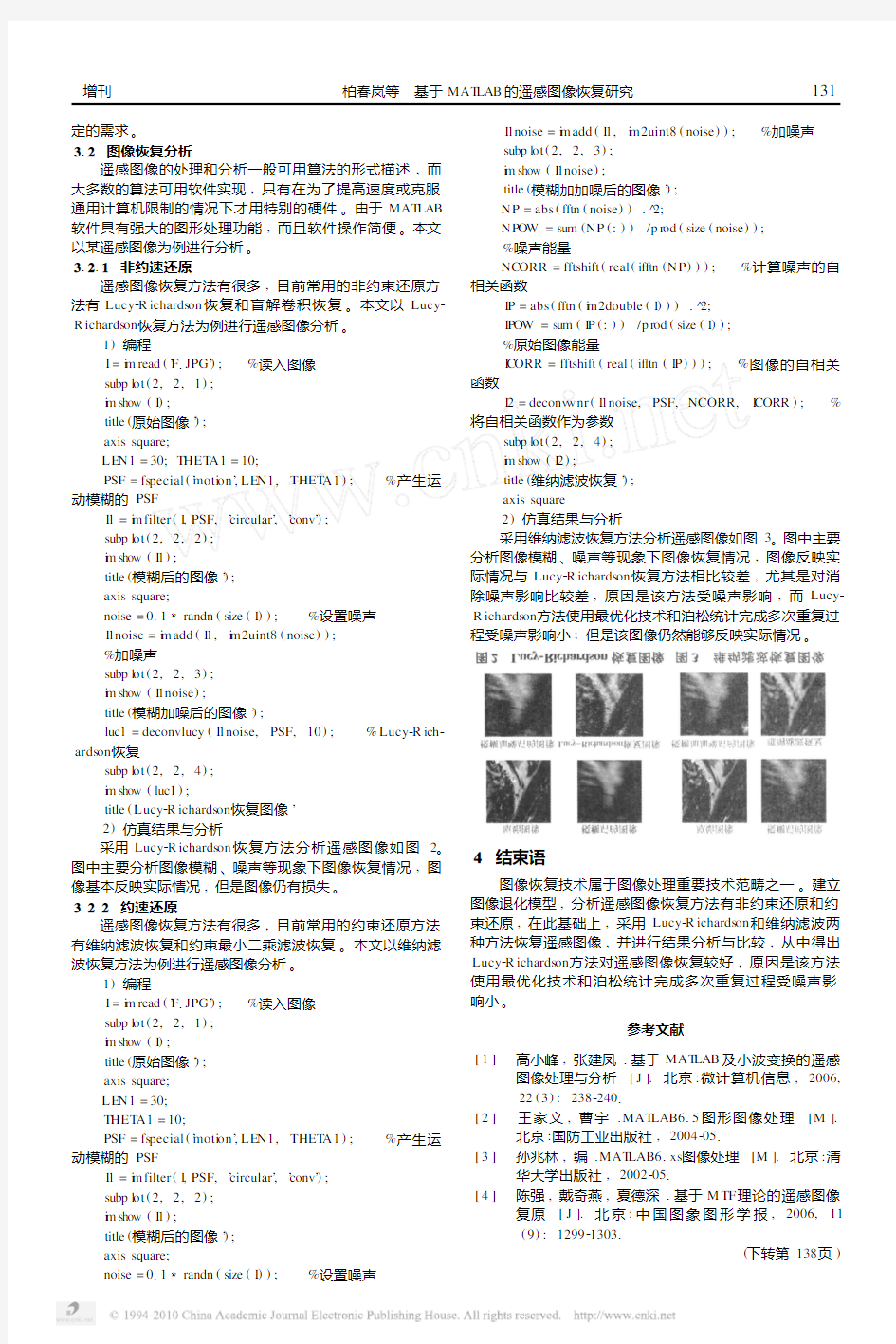
subp l ot (2,2,4);i m show (luc1);title (’L ucy 2R ichards on 恢复图像’2)仿真结果与分析采用Lucy 2R ichards on 恢复方法分析遥感图像如图2。图中主要分析图像模糊、噪声等现象下图像恢复情况,图像基本反映实际情况,但是图像仍有损失。31212 约速还原
遥感图像恢复方法有很多,目前常用的约束还原方法有维纳滤波恢复和约束最小二乘滤波恢复。本文以维纳滤波恢复方法为例进行遥感图像分析。
1)编程
I =i m read (’F 1JPG’
); %读入图像subp l ot (2,2,1);i m show (I );
title (’原始图像’
);axis square;LE N1=30;T HET A1=10;PSF =fs pecial (’m oti on’,LE N1,THET A1); %产生运动模糊的PSF
I 1=i m filter (I,PSF,’circular’,’conv’
);subp l ot (2,2,2);i m show (I 1);
title (’模糊后的图像’
);axis square;
noise =0113randn (size (I )); %设置噪声
I 1noise =i m add (I 1,i m 2uint8(noise )); %加噪声subp l ot (2,2,3);i m show (I 1noise );
title (’模糊加加噪后的图像’
);NP =abs (fftn (noise ))1^2;
NP OW =su m (NP (:))/p r od (size (noise )); %噪声能量
NC ORR =fftshift (real (ifftn (NP ))); %计算噪声的自相关函数
I P =abs (fftn (i m 2double (I )))1^2;I P OW =su m (I P (:))/p r od (size (I ));%原始图像能量
I C ORR =fftshift (real (ifftn (I P ))); %图像的自相关函数
I 2=deconv wnr (I 1noise,PSF,NCORR,I CORR ); %将自相关函数作为参数
subp l ot (2,2,4);i m show (I 2);
title (’维纳滤波恢复’
);axis square
2)仿真结果与分析
采用维纳滤波恢复方法分析遥感图像如图3。图中主要分析图像模糊、噪声等现象下图像恢复情况,图像反映实际情况与Lucy 2R ichards on 恢复方法相比较差,尤其是对消除噪声影响比较差,原因是该方法受噪声影响,而Lucy 2R ichards on 方法使用最优化技术和泊松统计完成多次重复过程受噪声影响小;但是该图像仍然能够反映实际情况
。
4 结束语
图像恢复技术属于图像处理重要技术范畴之一。建立图像退化模型,分析遥感图像恢复方法有非约束还原和约束还原,在此基础上,采用Lucy 2R ichards on 和维纳滤波两种方法恢复遥感图像,并进行结果分析与比较,从中得出Lucy 2R ichards on 方法对遥感图像恢复较好,原因是该方法使用最优化技术和泊松统计完成多次重复过程受噪声影响小。
参考文献
[1] 高小峰,张建凤1基于MAT LAB 及小波变换的遥感
图像处理与分析[J ].北京:微计算机信息,2006,22(3):23822401
[2] 王家文,曹宇1MAT LAB615图形图像处理[M ].
北京:国防工业出版社,20042051[3] 孙兆林,编1MAT LAB61xs 图像处理[M ].北京:清
华大学出版社,20022051[4] 陈强,戴奇燕,夏德深1基于M TF 理论的遥感图像
复原[J ].北京:中国图象图形学报,2006,11(9):1299213031
(下转第138页)
1
31
测绘科学 第34卷
进行权属调查。
3)地籍调查表问题
由于权属调查人员大多不是测量专业,绘制宗地草图有一定的难度,经常出现地籍调查表中的宗地草图与测绘成果界址点不符而需要修改,造成了地籍调查表凌乱而且有破坏现象,并且修改过的地籍调查表其法律效力也受到影响。采取测绘前置的作业方法后可以现状图为基础绘制宗地草图(边长可内业量取),宗地草图也可直接微机出图,可避免此种情况的发生。
4)界址点坐标问题
传统的作业模式是先进行权属调查,埋好界桩或设定好界址点后再进行地籍测量,测得界址点坐标。这种作业方式由于埋设界桩不准,导致测得的界址点坐标也不准确。采用测量前置的作业方法,权属调查人员拿着现状图到实地进行调查,在现状图上标明界址线的位置,然后由内业工作人员上图,直接取得界址点坐标,这样界址点坐标的精度要准确得多。
4 测绘前置的可行性研究
我市采用测绘前置的作业方法,提前完成了城镇地籍调查工作,既节约了人力、物力和财力,又大大提高了测量精度,在检查验收时得到专家首肯。
1)可以更有效的利用资源。采取测绘前置,以现状图作为工作底图的工作方法,可以使工作人员在开展工作前即对全区土地状况有一个概括的了解,对各个调查区域宗地的数量、密度等情况做出准确判断,合理划分街坊。以便将现有的人力、物力、财力等资源更合理的分配于各个调查区域,从而更有效的利用资源,同时也缩短了工作时间。
2)作业效果较好。在平度城区地籍调查工作中,全部采用了测绘前置的工作方法进行地籍测量与权属调查,测绘前置的作业方法得到了有效发挥,实现了既定目标,在检查验收时,精度较高,得到专家首肯,收到了良好效果。
3)有可借鉴的先进经验。在澳大利亚等国普遍采用的登记系统已有200余年历史,是一套较完备的土地登记体系,类似本文中所提的“测绘前置”,是有一定的先进经验可以借鉴。
4)是城镇地籍调查的趋势。国土资源部新颁布的《土地登记规定》(讨论意见稿)中对地籍调查做出了部分调整,未来地籍调查工作将更多的由社会中介单位承担,这一规定是城镇地籍调查发展的趋势,也为实行测绘前置的工作方式提供了条件。
5 结束语
实践证明,在城镇地籍调查中采用测绘前置的工作方法可提高工作效率和质量,并能为地籍管理信息化奠定基础。目前全省的第二次土地调查工作正在进行,建议的第二次土地调查工作中广泛采用测绘前置的工作方法,以进一步加快土地调查进度,提高成果质量。
参考文献
[1] T D1001293,城镇地籍调查规程[S].
[2] CH2001292,全球定位系统(GPS)测量规范[S].
[3] 元重举1测绘事业的发展与管理[J].西部资源,
2005,(6)1
[4] 陈军1关于测绘与可持续发展的若干思考[J].测
绘通报,2001,(8)1
[5] 杨正卫1现代城镇数字地籍调查的工作实践[J].
建材与装饰,2009,(5)1
M app i n g pre2fea si b ility stud i es i n the cada stra l survey
Abstract:Based on the Pingdu city cadastral survey work,study f oreign successful experiences and p ractices,combined with the devel opment trend of cadastral survey,a si m p le analysis of the survey used in the cadastral surveying and mapp ing p re2feasibility study t o exp l ore the more quickly,rati onal and effective working methods in order t o gain a more real,the current potential of the land base data,establish a s ound cadastral manage ment syste m,s o as t o achieve the land res ource inf or mati on s ociety services1 Key words:cadastral survey;mapp ing;research
L I AN G Hui2yi①,L I U Shi2ning②(①Shandong Pr ovince Pingdu Land and Res ources Bureau,Shandong Pingdu266700,China;
②Ocean University of China,Shandong Q ingdao266001,China)
(上接第131页)
[5] 陈杨,陈荣娟,等1MAT LAB61x图形编程与图像处
理[M].西安:西安电子科技大学出版社,
20022101
[6] 罗军辉,冯平,哈力旦A1MAT LAB710在图像处理
中的应用[M].北京:机械工业出版社,20052061[7] 董长虹1Matlab图像处理与应用[M].北京:国防工
业出版社,20042011
[8] 吴亚东1图像复原算法研究[D].西安:电子科技
大学,20062091
[9] 邱晓君1基于MTF的遥感图像恢复技术研究[D].
南京:南京理工大学,20062061
Study recover i n g of re m ote sen si n g i m age on M AT LAB
Abstract:The paper is mainly researched recovering of re mote sensing i m age1Degradati on model of re mote sensing i m age is estab2 lished1Per m issive revivificati on method and constraints revivificati on methods are used t o analyze recovering of re mote sensing i m2 age1On this basis,remote sensing i m age are adop ted Lucy2R ichards on method and W iener filtering method t o recovere1And then,the results are analyzed and compared1The results show that the recovering of re mote sensing i m age is app lied Lucy2R ichards on method with more definiti on1
Key words:I m age recovering;re mote sensing i m age;non2li m it recovering;li m it recovering;MAT LAB
BA I Chun2lan,WAN G Sa(Depart m ent of survey2mapp ing&U rban2s pace infor mati on,Henan University of U rban Constructi on, Henan Pingdingshan467044,China)
831
基于MATLAB的图像复原
基于MATLAB的图像复原 摘要 随着信息技术的发展,数字图像像已经充斥着人们身边的任意一个角落。由于图像的传送、转换,或者其他原因,可能会造成图像的降质、模糊、变形、质量下降、失真或者其他情况的图像的受损。本设计就针对“图像受损”的问题,在MATLAB环境中实现了利用几何失真校正方法来恢复被损坏的图像。几何失真校正要处理的则是在处理的过程,由于成像系统的非线性,成像后的图像与原图像相比,会产生比例失调,甚至扭曲的图像。 图像复原从理论到实际的操作的实现,不仅能改善图片的视觉效果和保真程度,还有利于后续的图片处理,这对医疗摄像、文物复原、视频监控等领域都具有很重要的意义。 关键字:图像复原;MATLAB;几何失真校正
目录 摘要 (1) 1 MATLAB 6.x 信号处理 (1) 2 图像复原的方法及其应用 (13) 2.1 图像复原的方法 (13) 2.2 图像复原的应用 (14) 3 几何失真校正实现 (15) 3.1 空间变换 (15) 3.1.1 已知()y x r,和()y x s,条件下的几何校正 (16) 3.1.2 ()y x r,和()y x s,未知条件下的几何失真 (16) 3.2 灰度插值 (17) 3.3 结果分析 (19) 参考文献 (20) 附录 (21)
1 MATLAB 6.x信号处理 (1)对MATLAB 6 进行了简介,包括程序设计环境、基本操作、绘图功能、M文件以及MATLAB 6 的稀疏矩阵这五个部分。MATLAB的工作环境有命令窗口、启动平台、工作空间、命令历史记录与当前路径窗口这四部分。M文件的编辑调试环境有四个部分的设置,分别是:Editor/Debugger的参数设置,字体与颜色的设置,显示方式的设置,键盘与缩进的设置。MATLAB采用路径搜索的方法来查找文件系统的M文件,常用的命令文件组在MATLAB文件夹中,其他M文件组在各种工具箱中。基本操作主要是对一些常用的基本常识、矩阵运算及分解、数据分析与统计这三方面进行阐述。MATLAB的基本操作对象时矩阵,所以对于矩阵的输入、复数与复数矩阵、固定变量、获取工作空间信息、函数、帮助命令进行了具体的描述。矩阵运算是MATLAB的基础,所有参与运算的数都被看做为矩阵。MATLAB中共有四大矩阵分解函数:三角分解、正交分解、奇异值分解以及特征值分解。数据分析与统计包括面向列的数据分析、数据预处理、协方差矩阵与相关系数矩阵、曲线拟合这四部分。MATLAB 中含有丰富的图形绘制寒素,包括二维图形绘制、三维图像绘制以及通用绘图工具函数等,同时还包括一些专业绘图函数,因此其具有很强大的绘图功能。简单的二维曲线可以用函数plot来绘制,而简单的三维曲线图则用plot3来绘制。在绘制图形时,MATLAB自动选择坐标轴表示的数值范围,并用一定的数据间隔标记做标注的数据,当然自己也可以指定坐标轴的范围与数据间隔。专业的绘图函数有绘梯度图制条形图、饼图、三维饼图、箭头图、星点图、阶梯图以及等高线。M文件时用户自己通过文本编辑器或字处理器生成的,且其之间可以相互调用,用户可以根据自己的需要,自我编写M文件。M文件从功能上可以分为底稿文件与函数文件两类,其中底稿文件是由一系列MATLAB语句组成的,而函数文件的第一行必须包含关键字“function”,二者的区别在于函数文件可以接受输入参数,并可返回输出参数,而底稿文件不具备参数传递的功能;在函数文件中定义及使用的变量大都是局部变量,只在本函数的工作区内有效,一旦退出该函数,即为无效变量,而底稿文件中定义或使用的变量都是全局变量,在退出文件后仍为有效变量。稀疏矩阵是一种特殊类型的矩阵,
基于matlab的图像识别与匹配
基于matlab的图像识别与匹配 摘要 图像的识别与匹配是立体视觉的一个重要分支,该项技术被广泛应用在航空测绘,星球探测机器人导航以及三维重建等领域。 本文意在熟练运用图像的识别与匹配的方法,为此本文使用一个包装袋并对上面的数字进行识别与匹配。首先在包装袋上提取出来要用的数字,然后提取出该数字与包装袋上的特征点,用SIFT方法对两幅图进行识别与匹配,最终得到对应匹配数字的匹配点。仿真结果表明,该方法能够把给定数字与包装袋上的相同数字进行识别与匹配,得到了良好的实验结果,基本完成了识别与匹配的任务。
1 研究内容 图像识别中的模式识别是一种从大量信息和数据出发,利用计算机和数学推理的方法对形状、模式、曲线、数字、字符格式和图形自动完成识别、评价的过程。 图形辨别是图像识别技术的一个重要分支,图形辨别指通过对图形的图像采用特定算法,从而辨别图形或者数字,通过特征点检测,精确定位特征点,通过将模板与图形或数字匹配,根据匹配结果进行辨别。 2 研究意义 数字图像处理在各个领域都有着非常重要的应用,随着数字时代的到来,视频领域的数字化也必将到来,视频图像处理技术也将会发生日新月异的变化。在多媒体技术的各个领域中,视频处理技术占有非常重要的地位,被广泛的使用于农业,智能交通,汽车电子,网络多媒体通信,实时监控系统等诸多方面。因此,现今对技术领域的研究已日趋活跃和繁荣。而图像识别也同样有着更重要的作用。 3 设计原理 3.1 算法选择 Harris 角点检测器对于图像尺度变化非常敏感,这在很大程度上限制了它的应用范围。对于仅存在平移、旋转以及很小尺度变换的图像,基于Harris 特征点的方法都可以得到准确的配准结果,但是对于存在大尺度变换的图像,这一类方法将无法保证正确的配准和拼接。后来,研究人员相继提出了具有尺度不变性的特征点检测方法,具有仿射不变性的特征点检测方法,局部不变性的特征检测方法等大量的基于不变量技术的特征检测方法。 David.Lowe 于2004年在上述算法的基础上,总结了现有的基于不变量技术的特征检测方法,正式提出了一种基于尺度空间的,对图像平移、旋转、缩放、甚至仿射变换保持不变性的图像局部特征,以及基于该特征的描述符。并将这种方法命名为尺度不变特征变换(Scale Invariant Feature Transform),以下简称SIFT 算法。SIFT 算法首先在尺度空间进行特征检测,并确定特征点的位置和特征点所处的尺度,然后使用特征点邻域梯度的主方向作为该特征点的方向特征,以实现算子对尺度和方向的无关性。利用SIFT 算法从图像中提取出的特征可用于同一个物体或场景的可靠匹配,对图像尺度和旋转具有不变性,对光照变化、
基于Matlab的彩色图像分割
用Matlab来分割彩色图像的过程如下: 1)获取图像的RGB颜色信息。通过与用户的交互操作来提示用户输入待处理的彩色图像文件路径; 2)RGB彩色空间到lab彩色空间的转换。通过函数makecform()和applycform()来实现; 3)对ab分量进行Kmean聚类。调用函数kmeans()来实现; 4)显示分割后的各个区域。用三副图像分别来显示各个分割目标,背景用黑色表示。Matlab程序源码 %文件读取 clear; clc; file_name = input('请输入图像文件路径:','s'); I_rgb = imread(file_name); %读取文件数据 figure(); imshow(I_rgb); %显示原图 title('原始图像'); %将彩色图像从RGB转化到lab彩色空间 C = makecform('srgb2lab'); %设置转换格式 I_lab = applycform(I_rgb, C); %进行K-mean聚类将图像分割成3个区域 ab = double(I_lab(:,:,2:3)); %取出lab空间的a分量和b分量 nrows = size(ab,1); ncols = size(ab,2); ab = reshape(ab,nrows*ncols,2); nColors = 3; %分割的区域个数为3 [cluster_idx cluster_center] = kmeans(ab,nColors,'distance','sqEuclidean','Replicates',3); %重复聚类3次 pixel_labels = reshape(cluster_idx,nrows,ncols); figure(); imshow(pixel_labels,[]), title('聚类结果'); %显示分割后的各个区域 segmented_images = cell(1,3); rgb_label = repmat(pixel_labels,[1 1 3]); for k = 1:nColors color = I_rgb; color(rgb_label ~= k) = 0; segmented_images{k} = color;
基于MATLAB的图像分割方法及应用
安徽财经大学 (《图像处理》课程论文) 题目:图像分割算法研究——基于分水岭分割法的彩色图像分割学院:管理科学与工程学院 专业:电子信息工程 姓名:万多荃 学号:20123712 电话: 任课教师:许晓丽 论文成绩: 2015年10月
目录 摘要 图像分割技术是非常重要的图像处理技术之一,无语是在理论研究还是在实际应用中人们都非常的重视。图像分割有许多的种类和方式,一些分割运算能够直接应用于任何图像,而另外一些却只适用于特别种类的图像。图像分割技术是从图像处理技术,再到后期的图像分析的关键步骤,图像分割结果的好坏,可以说对图像的理解有直接影响。
本文根据图像分割原理及人眼视觉的基本理论,研究图像的彩色模型及图像分割的常用方法,比较各方法的特点,并选择合适的方法对图像进行分割。本文采用MATLAB软件对图像进行彩色坐标变换及阈值分割,计算简单,具有较高的运行效率,分割的结果是使图像更符合人眼的视觉特性,获得比较好的效果。 关键字:图像处理;图像分割;人类视觉;MATLAB 1.前言 1.1图像分割技术 图像分割技术是非常重要的图像处理技术之一,无语是在理论研究还是在实际应用中人们都非常的重视。图像分割有许多的种类和方式,一些分割运算能够直接应用于任何图像,而另外一些却只适用于特别种类的图像。图像分割技术是从图像处理技术,再到后期的图像分析的关键步骤,图像分割结果的好坏,可以说对图像的理解有直接影响。 图像数据的模糊和噪声的干扰是分割问题的两大难题。到目前为止,还没有一个完美的图像分割方法,可以根据人的意愿精确地分割任何一种图像。现实图像中景物情况各种不同,具体问题需具体分析,按照实际情况选择得当的方法。分割成果的好坏或正确与否,到现在为止,尚无一个统一的评价和判断标准,分割的好坏务必从分割的效果和现实应用的场合来判断。然而,在人类研究图像的历史长河中,仍然积累了许多经典的图像分割方法。固然这些分割方法不可以适应全部种类的图像分割,可是这些方法却是图像分割方法进一步发展的根基。实际上,当代一些分割算法恰巧是从经典的图像分割方法中产生出来的。图像分割法大致可以分为三个种:边缘检测法,阈值分割法和基于区域的图像分割法。 2研究目的 视觉是人类最高级的感知器官,所以图像在人类感知中承担着非常重要的角色,这是毋庸置疑的。 本文的主要研究目的是对图像的分割方法进行研究,选择适合本论文的设计方法,然后通过对图像的分割,以达到人眼的最佳视觉效果。 本课题主要是通过对人眼的视觉系统研究,然后选择与人眼视觉系统密切相关的颜色模型进行颜色空间模型之间的相互转换,再对图像分割方法进行比较选择合适的分割方法,通过MATLAB平台实现彩色图像分割,最后对分割后的图像进行比较来获得到最佳的视觉效果。
基于MATLAB的图像恢复算法研究
中北大学 课程设计说明书 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 学院:信息商务学院 专业:电子信息工程 题目:信息处理综合实践: 基于MATLAB的图像恢复算法研究 指导教师:职称: 年月日
中北大学 课程设计任务书 13/14 学年第一学期 学院:信息商务学院 专业:电子信息工程 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 课程设计题目:信息处理综合实践: 于MATLAB的图像恢复算法研究起迄日期: 课程设计地点:电子信息科学与技术专业实验室 指导教师: 系主任: 下达任务书日期: 年月日
目录 摘要: (6) 1.图像复原的概念 (6) 1.1图像复原的定义 (6) 1.2 图象恢复与图象增强的异同 (6) 1.3 图象退化的原因 (6) 1.4 维纳滤波的研究历史 (6) 1.5图象退化举例 (7) 2.退化模型 (8) 2.1图象退化模型概述 (8) 2.2连续函数退化模型 (8) 2.3离散函数退化模型 (8) 3.图象复原技术 (9) 3.1无约束恢复 (9) 3.2逆滤波 (9) 3.3 维纳(Wiener)滤波器基本原理 (10) 3.4维纳滤波复原法 (11) 3.5图像复原例图 (12) 4.图像复原的MATLAB实现实例 (13) 5.结束语 (14) 参考文献: (14) 附录: (14) (1).维纳滤波复原源代码: (14) (2).规则化滤波复原程序源代码: (15) (3).Lucy-Richardson复原滤波源代码: (15) (4).盲目去卷积复原源代码: (15)
摘要: 图像复原是图象处理的一个重要课题。图像复原也称图象恢复,是图象 处理中的一大类技术。它的主要目的是改善给定的图像质量。当给定了一幅 退化了的或者受到噪声污染了的图像后,利用退化现象的某种先验知识来重 建或恢复原有图像是复原处理的基本过程。可能的退化有光学系统中的衍 射,传感器非线性畸变,光学系统的像差,摄影胶片的非线性,大气湍流的 扰动效应,图像运动造成的模糊及几何畸变等等。噪声干扰可以由电子成像 系统传感器、信号传输过程或者胶片颗粒性造成。各种退化图像的复原都 可归结为一种过程,具体地说就是把退化模型化,并且采用相反的过程进行 处理,以便恢复出原图像。文章介绍了图象退化的原因,几种常用的图像滤 波复原技术,以及用MATLAB实现图像复原的方法。 1.图像复原的概念 1.1图像复原的定义 图像复原也称图象恢复,是图象处理中的一大类技术。所谓图像复原,是指去除或减轻在获取数字图像过程中发生的图像质量下降(退化)这些退化包括由光学系统、运动等等造成图像的模糊,以及源自电路和光度学因素的噪声。图像复原的目标是对退化的图像进行处理,使它趋向于复原成没有退化的理想图像。成像过程的每一个环节(透镜,感光片,数字化等等)都会引起退化。在进行图像复原时,既可以用连续数学,也可以用离散数学进行处理。其次,处理既可在空间域,也可在频域进行。 1.2 图象恢复与图象增强的异同 相同点:改进输入图像的视觉质量。 不同点:图象增强目的是取得较好的视觉结果(不考虑退化原因);图象恢复根据相应的退化模型和知识重建或恢复原始的图像(考虑退化原因)。 1.3 图象退化的原因 图象退化指由场景得到的图像没能完全地反映场景的真实内容,产生了失真等问题。其原因是多方面的。如: 透镜象差/色差 聚焦不准(失焦,限制了图像锐度) 模糊(限制频谱宽度) 噪声(是一个统计过程) 抖动(机械、电子) 1.4 维纳滤波的研究历史 维纳是著名的数学家,后来被誉为信息理论家。维纳的著作不仅是一个很好的创见,而且具有结合工程的实际意义,是线性滤波理论研究的一个重要的开端. 在第二次世界大战中,由于雷达的发明以及防空炮火控制的任务,把大量有修养的数学家和物理学家都动员到信息科学这个研究领域中来了,这个时候人们活跃于这个领域,并有许多重大的科学创造。数学家维纳对于滤波理论的研究成果,就是这时候重大的科学创见之一。
基于MATLAB的图像处理字母识别
数字图像处理 报告名称:字母识别 学院:信息工程与自动化学院专业:物联网工程 学号:201310410149 学生姓名:廖成武 指导教师:王剑 日期:2015年12月28日 教务处制
目录 字母识别 1.---------------------测试图像预处理及连通区域提取 2.---------------------样本库的建立采集feature 3.---------------------选择算法输入测试图像进行测试 4.---------------------总结
字母识别 1.imgPreProcess(联通区域提取)目录下 conn.m:连通区域提取分割(在原图的基础上进行了膨胀、腐蚀、膨胀的操作使截取的图像更加接近字母) %%提取数字的边界,生成新的图 clear; clc; f=imread('5.jpg'); f=imadjust(f,[0 1],[1 0]); SE=strel('square',5); %%膨胀、腐蚀、膨胀 A2=imdilate(f,SE); SE=strel('disk',3) f=imerode(A2,SE) SE=strel('square',3); f=imdilate(f,SE); gray_level=graythresh(f); f=im2bw(f,gray_level); [l,n]=bwlabel(f,8) %%8连接的连接分量标注 imshow(f) hold on for k=1:n %%分割字符子句 [r,c]=find(l==k); rbar=mean(r); cbar=mean(c); plot(cbar,rbar,'Marker','o','MarkerEdgeColor','g','MarkerFaceColor',' y','MarkerSize',10); % plot(cbar,rbar,'Marker','*','MarkerEdgecolor','w'); row=max(r)-min(r) col=max(c)-min(c) for i=1:row for j=1:col seg(i,j)=1; end
部分图像分割的方法(matlab)
部分图像分割的方法(matlab)
大津法: function y1=OTSU(image,th_set) image=imread('color1.bmp'); gray=rgb2gray(image);%原图像的灰度图 low_high=stretchlim(gray);%增强图像,似乎也不是一定需要gray=imadjust(gray,low_high,[]); % subplot(224);imshow(gray);title('after adjust'); count=imhist(gray); [r,t]=size(gray); n=r*t; l=256; count=count/n;%各级灰度出现的概率 for i=2:l if count(i)~=0 st=i-1; break end end %以上循环语句实现寻找出现概率不为0的最小灰度值 for i=l:-1:1 if count(i)~=0; nd=i-1; break end end %实现找出出现概率不为0的最大灰度值 f=count(st+1:nd+1); p=st;q=nd-st;%p和分别是灰度的起始和结束值 u=0; for i=1:q; u=u+f(i)*(p+i-1); ua(i)=u; end
程序二: clc; clear; cd 'D:\My Documents\MATLAB' time = now; I = imread('qr4.bmp'); figure(1),imshow(I),title('p1_1.bmp'); % show the picture I2 = rgb2gray(I); figure(2),imshow(I2),title('I2.bmp'); %?D?μ??2¨ J = medfilt2(I2); figure(3),imshow(J); imwrite(J,'J.bmp'); [M N] = size(J); J1 = J(1:M/2,1:fix(N/2)); J2 = J(1:M/2,fix(N/2)+1:N); J3 = J(M/2+1:M, 1:fix( N/2)); J4 = J(M/2+1:M, fix(N/2)+1:N); % figure(4), img = J1; T1 = test_gray2bw( img ); % figure(5), img = J2; T2 = test_gray2bw( img ); % figure(6), img = J3; T3 = test_gray2bw( img ); % figure(7), img = J4; T4 = test_gray2bw( img ); T = [T1,T2;T3,T4]; figure,imshow(T) % T1 = edge(T,'sobel'); % figure,imshow(T1); % BW = edge(T,'sobel'); % f igure,imshow(BW); function [bw_img] = test_gray2bw( img ) %大津法 [row_img col_img ] = size( img ) all_pix = row_img * col_img % get probability of each pixel(????). count_pix = zeros(1,256) % pro_pix = [] for i = 1 : 1 : row_img for j = 1 : 1 : col_img count_pix(1,img(i,j)+1) = count_pix(1,img(i,j)+1) + 1 %í3??′?êy end en d pro_pix = count_pix / all_pix % choose k value; max_kesi = -1 T = 0 for k = 1 : 1 : while( i <= k ) wa = wa + pro_pix(1,i+1) %?°k??i£?????????μ??ò?è???ê£????êoí ua = ua + i * pro_pix(1,i+1) i = i + 1 end
基于matlab的直方图均衡化
目录 1、引言 (2) 2、直方图基础 (3) 3、直方图均衡化 (3) 3.1 直方图均衡化的概念 (3) 3.2 直方图均衡化理论 (4) 3.3 Matlab 实现 (4) 4、结论 (7) 致谢 (7) 参考文献 (7)
图像增强处理 —直方图均衡化的Matlab 实现摘要:为了使图像的灰度范围拉开或使灰度均匀分布,从而增大反差,使图像细节清晰,以达到增强的目的,通常采用直方图均衡化及直方图规定化两种变换,此文中探讨了直方图的理论基础,直方图均衡化的概念及理论,以Matlab为平台,对某地区遥感TM单波段遥感影像进行直方图均衡化,并给出了具体程序、仿真结果图像、直方图及变换函数。实验结果表明,原来偏暗的且对比度较低的图像经过直方图均衡化后图像的对比度及平均亮度明显提高,直方图均衡化处理能有效改善灰度图像的对比度差和灰度动态范围。 关键词:图像增强直方图均衡化 Matlab 1、引言 图像增强是指对图像的某些特征,如边缘、轮廓或对比度等进行强调或尖锐化。当一幅图像曝光不足或过度,造成对比度过小或过大而不能显示具体细节,通过增加这些细节的动态范围改善图像的视觉效果。图像增强可以突出图像中所感兴趣的特征信息,改善图像的主观视觉质量,提高图像的可懂度。 增强的首要目标是处理图像,使其比原始图像更适合于特定应用。图像增强的方法分为两大类:空间域方法和频域方法。“空间域”一词是指图像平面本身,这类方法是以对图像的像素直接处理为基础的。“频域”处理技术是以修改图像的傅氏变换为基础的。 一般说来,原始遥感数据的灰度值范围都比较窄,这个范围通常比显示器的显示范围小的多。增强处理可将其灰度范围拉伸到0-255 的灰度级之间来显示,从而使图像对比度提高,质量改善。增强主要以图像的灰度直方图最为分析处理的基础。直方图均衡化能够增强整个图像的对比度,提高图像的辨析程度,算法简单,增强效果好。本文主要讨论了空间域的直方图均衡化增强,并用Matlab 进行实验验证。 2、直方图基础 1、灰度直方图是灰度级的函数,描述的是图像中具有该灰度级的像元的个数。确定图像像
基于MATLAB的运动模糊图像处理
基于MATLAB的运动模糊图像处理 提醒: 我参考了文献里的书目和网上的一些代码而完成的,所以误差会比较大,目前对于从网上下载的模糊图片的处理效果很不好,这是我第一次上传自己完成的实验的文档,希望能帮到一些人吧。 研究目的 在交通系统、刑事取证中图像的关键信息至关重要,但是在交通、公安、银行、医学、工业监视、军事侦察和日常生活中常常由于摄像设备的光学系统的失真、调焦不准或相对运动等造成图像的模糊,使得信息的提取变得困难。但是相对于散焦模糊,运动模糊图像的复原在日常生活中更为普遍,比如高速运动的违规车辆的车牌辨识,快速运动的人群中识别出嫌疑人、公安刑事影像资料中提取证明或进行技术鉴定等等,这些日常生活中的重要应用都需要通过运动模糊图像复原技术来尽可能地去除失真,恢复图像的原来面目。因此对于运动模糊图像的复原技术研究更具有重要的现实意义。 图像复原原理 本文探讨了在无噪声的情况下任意方向的匀速直线运动模糊图像的复原问题,并在此基础上讨论了复原过程中对点扩散函数(PSF)的参数估计从而依据自动鉴别出的模糊方向和长度构造出最为近似的点扩散函数,构造相应的复原模型,实现运动模糊图像的复原;在模糊图像自动复原的基础上,根据恢复效果图的纹理特征和自动鉴别出的模糊长度和角度,人工调整模糊方向和长度参数,使得复原效果达到最佳。 实验过程 模糊方向的估计: 对图1(a)所示的原始图像‘车牌’图像做方向θ=30?,长度L=20像素的匀速直线运动模糊,得到退化图像如图1(b)
1(a) 1(b) j=imread('车牌1.jpg'); figure(1),imshow(j); title('原图像'); len=20; theta=30; psf=fspecial('motion',len,theta); j1=imfilter(j,psf,'circular','conv'); figure,imshow(j1); title('PSF 模糊图像'); 图1(c)和1(d)分别为原图像和模糊图像的二次傅里叶变化
部分图像分割的方法(matlab)
大津法: function y1=OTSU(image,th_set) image=imread('color1.bmp'); gray=rgb2gray(image);%原图像的灰度图 low_high=stretchlim(gray);%增强图像,似乎也不是一定需要gray=imadjust(gray,low_high,[]); % subplot(224);imshow(gray);title('after adjust'); count=imhist(gray); [r,t]=size(gray); n=r*t; l=256; count=count/n;%各级灰度出现的概率 for i=2:l if count(i)~=0 st=i-1; break end end %以上循环语句实现寻找出现概率不为0的最小灰度值 for i=l:-1:1 if count(i)~=0; nd=i-1; break end end %实现找出出现概率不为0的最大灰度值 f=count(st+1:nd+1); p=st;q=nd-st;%p和分别是灰度的起始和结束值 u=0; for i=1:q; u=u+f(i)*(p+i-1); ua(i)=u; end
%计算图像的平均灰度值 for i=1:q; w(i)=sum(f(1:i)); end %计算出选择不同k的时候,A区域的概率 d=(u*w-ua).^2./(w.*(1-w));%求出不同k值时类间方差[y,tp]=max(d);%求出最大方差对应的灰度级 th=tp+p; if th
基于matlab的遥感图像处理程序
基于matlab的遥感图像处理程序报告 南京理工大学电光学院,无履仙人 一、程序简介 基于matlab的GUI可视化遥感图像处理程序,界面布局如下图: 菜单栏包括:文件,图像旋转,自动识别有效区域,获取有效区域,压缩,图像增强,伪彩色图像,还原重做,退出,关于等项。 主界面部分包含两个图像显示,和部分按钮及需要输入的参数。由于界面大小有限,部分功能留在菜单栏中。 二、处理步骤及部分源码 1、打开和保存文件 首先是文件菜单,包含打开和保存,打开的文件将显示在原始图像和处理图像两部分中,在处理过程中,原始图像不变,以作为和处理图像对比,保存图片只保存处理后的图片,处理前的图片不做保存。 图片打开后如图所示,
2、图像旋转 由图可见图像有部分区域无有效信息,不利于处理和获得有效信息,故应去除,首先进行旋转,便于去除无效区域。 在旋转角度编辑栏内输入要旋转的角度然后点旋转按钮,进行旋转。旋转后如图, 图像旋转源码为: function imrotate_Callback(hObject, eventdata, handles) h=getappdata(handles.figure_demo,'img_2'); x=get(handles.angle,'string'); an=str2num(x); g=imrotate(h,an,'bilinear','crop'); img_2=g; axes(handles.tag); imshow(img_2); setappdata(handles.figure_demo,'img_2',img_2); 3。、有效区域自动提取 现在图中有效区域基本是在一个矩形内,可以通过算法将有效区域边界的坐标求出来,单击自动识别有效区域按钮,求出后显示在图片右边的静态文本框内。如下图, 图像自动识别有效区域源码如下, function auto_Callback(hObject, eventdata, handles) h=getappdata(handles.figure_demo,'img_2'); [x,y]=size(h); flag=1; for i=1:x
MATLAB实现图像恢复设计报告
MATLAB实现图像恢复设计报告 一、设计目标及需求分析 设计目标:希望通过matlab设计一个软件来实现对CT图像的模糊再恢复的过程,是对现实中CT图像复原的一个简单仿真。 需求分析:随着网络和通信技术的发展,数字图像处理与分析技术已经在科学研究、工业生产、医疗卫生、教育等领域得到了广泛应用,对推动社会的发展和提高人们的生活水平都起到了重要作用[1]。而在医学CT影像中,CT图像的影响因素众多,包括部分容积效应,空间分辨力,密度分辨力,相机条件设定和噪声等[2]。这些因素会造成CT 图像模糊失真,需要对图像进行恢复,才能满足对临床诊断的要求。 二、设计概要 图像退化 三、详细设计 在GUI界面设计中选取三个静态文本分别叫“原始图像”、“模糊加噪图像”、“恢复图像”,添加三个坐标轴,三个按钮分别用于“读入原始图像”、“模糊和加噪”、“恢复”。 图一 GUI界面设计
①点击按钮“读入图像”,将选取的原始肺部CT图像导入第一个坐标轴中。 ②点击按钮“模糊和加噪”,对原始CT图像进行运动模糊,加入高斯噪声,生成的图像显示在第二个坐标轴中。 图二模糊和加噪 在这里用MATLAB图像处理工具函数fspecial生成了一个运动模糊的点扩展函数PSF,PSF 再与原图卷积得到模糊图像,这一步操作是为了模拟现实CT图像中由于病人身体的移动,心脏搏动和胃肠蠕动这些不自主的运动造成的伪影。在CT图像中的噪声有多种类型,有高斯噪声,椒盐噪声,泊松噪声,斑点噪声等。这里只引入了高斯噪声是由于通过查阅文献得知,CT图像中的噪声主要是高斯噪声[3],是一个抽象简化的退化模型。 ③点击按钮“恢复”,对模糊和加噪的图像进行图像复原,将复原后的图像显示在第三个坐标轴上。
基于matlab的人脸识别算法(PCA)
3.基于matlab的人脸识别算法 3.1 问题描述 对于一幅图像可以看作一个由像素值组成的矩阵,也可以扩展开,看成一个矢量,如一幅 N*N 象素的图像可以视为长度为N2 的矢量,这样就认为这幅图像是位于N2 维空间中的一个点,这种图像的矢量表示就是原始的图像空间,但是这个空间仅是可以表示或者检测图像的许多个空间中的一个。不管子空间的具体形式如何,这种方法用于图像识别的基本思想都是一样的,首先选择一个合适的子空间,图像将被投影到这个子空间上,然后利用对图像的这种投影间的某种度量来确定图像间的相似度,最常见的就是各种距离度量。因此,本次试题采用PCA算法并利用GUI实现。 对同一个体进行多项观察时,必定涉及多个随机变量X1,X2,…,Xp,它们都是的相关性, 一时难以综合。这时就需要借助主成分分析来概括诸多信息的主要方面。我们希望有一个或几个较好的综合指标来概括信息,而且希望综合指标互相独立地各代表某一方面的性质。 任何一个度量指标的好坏除了可靠、真实之外,还必须能充分反映个体间的变异。如果有一项指标,不同个体的取值都大同小异,那么该指标不能用来区分不同的个体。由这一点来看,一项指标在个体间的变异越大越好。因此我们把“变异大”作为“好”的标准来寻求综合指标。3.1.1 主成分的一般定义 设有随机变量X1,X2,…,Xp,其样本均数记为,,…,,样本标准差记为S1,S2,…,Sp。首先作标准化变换,我们有如下的定义: (1) 若C1=a11x1+a12x2+ … +a1pxp,…,且使 Var(C1)最大,则称C1为第一主成分; (2) 若C2=a21x1+a22x2+…+a2pxp,…,(a21,a22,…,a2p)垂直于(a11,a12,…,a1p),且使Var(C2)最大,则称C2为第二主成分; (3) 类似地,可有第三、四、五…主成分,至多有p个。 3.1.2 主成分的性质 主成分C1,C2,…,Cp具有如下几个性质: (1) 主成分间互不相关,即对任意i和j,Ci 和Cj的相关系数 Corr(Ci,Cj)=0 i j (2) 组合系数(ai1,ai2,…,aip)构成的向量为单位向量, (3) 各主成分的方差是依次递减的,即 Var(C1)≥Var(C2)≥…≥Var(Cp)
基于Matlab的彩色图像分割
3 Matlab编程实现 3.1 Matlab编程过程 用Matlab来分割彩色图像的过程如下: 1)获取图像的RGB颜色信息。通过与用户的交互操作来提示用户输入待处理的彩色图像文件路径; 2)RGB彩色空间到lab彩色空间的转换。通过函数makecform()和applycform()来实现; 3)对ab分量进行Kmean聚类。调用函数kmeans()来实现; 4)显示分割后的各个区域。用三副图像分别来显示各个分割目标,背景用黑色表示。3.2 Matlab程序源码 %文件读取 clear; clc; file_name = input('请输入图像文件路径:','s'); I_rgb = imread(file_name); %读取文件数据 figure(); imshow(I_rgb); %显示原图 title('原始图像'); %将彩色图像从RGB转化到lab彩色空间 C = makecform('srgb2lab'); %设置转换格式 I_lab = applycform(I_rgb, C); %进行K-mean聚类将图像分割成3个区域 ab = double(I_lab(:,:,2:3)); %取出lab空间的a分量和b分量 nrows = size(ab,1); ncols = size(ab,2); ab = reshape(ab,nrows*ncols,2); nColors = 3; %分割的区域个数为3 [cluster_idx cluster_center] = kmeans(ab,nColors,'distance','sqEuclidean','Replicates',3); %重复聚类3次 pixel_labels = reshape(cluster_idx,nrows,ncols); figure(); imshow(pixel_labels,[]), title('聚类结果'); %显示分割后的各个区域 segmented_images = cell(1,3); rgb_label = repmat(pixel_labels,[1 1 3]); for k = 1:nColors
基于Matlab的遥感图像处理
基于Matlab的遥感图像处理 测绘工程1161641014 鲍家顺 摘要文章运用Matlab软件对遥感影像的不足之处进行处理改善,详细介绍了处理方法和处理的原理,对处理结果进行了比对分析,并进行了边缘检测与特征提取,论证了处理方法的可行性。 关键词图像处理;matlab ;均衡化;规定化;色彩平衡;边缘检测;特征提取 在获取遥感图像过程中,由于多种因素的影响,会导致图像质量的退化,为了改善图像质量,突出遥感图像中的某些信息,提高图像的视觉效果,需要对图像进行各方面的处理,如分段线形拉伸,对数变换,直方图规定化、正态化,图像滤波,纹理分析及目标检测等。通过图像处理可以去除图像中的噪声,增强感兴趣的目标和周围背景图像间的反差,有选择地突出便于人或电脑分析的信息,抑制一些无用的信息,强调出图像的边缘,增强图像的识别方便性,从而进行边缘检测和特征提取。图像写出函数,显示图像函数有image ( ) 、inshow ( ) 等。[2 ]Matlab 图像处理工具箱处理工具提供了imhist () 函数来计算和显示图像的直方图, 提供了直方图均衡化的函数histeq() 、边缘检测函数edge ( ) 、腐蚀函数imerode () 、膨胀函数imdilate () 及二值图像转换函数im2bw () 等。文中实验数据采用的是桂林市区灰度遥感图像,宽度为1024 像素,高度为713 像素。 文件读入: 讲workspace切入到图片所在图层: Cd d:\ 读入图片: [x,cmap]=imread('m.PNG'); %将图片读入转换为矩阵 clf;imshow(x); %显示图片 原始图片
基于MATLAB的运动模糊图像恢复技术
基于MATLAB的运动模糊图像恢复技术 王洪珏 (温州医学院,浙江,温州) 摘要:MATLAB是当今流行的科学计算软件,它具有很强的数据处理能力。在其图像处理工具箱中有四个图像复原函数,本文就这些函数的算法原理、运用和恢复处理效果结合实力效果作简要对比讨论。 0前言 图像复原时图像处理中一个重要的研究课题。图像在形成、传输和记录的过程中,由于传感器的噪声、摄像机未对好焦、摄像机与物体相对运动、系统误差、畸变、噪声等因素的影响,使图像往往不是真实景物的完善影像。这种图像在形成、传输和记录过程中,由于成像系统、传输介质和设备的不完善,使图像质量下降的过程称为图像的退化。图像复原就是通过计算机处理,对质量下降的图像加以重建或恢复的过程。 图像复原过程一般为:找退化原因→建立退化模型→反向推演→图像复原 1算法产生概述 开发算法时,首先要创建图像退化的线性数学模型,接着选择准则函数,并以适当的数学形式表达,然后进行数学推演。推演过程中通常要进行表达形式(即空域形式、频域形式、矩阵-矢量形式或变换域形式)的相互转换,最后得到图像复原算式。 退化数学模型的空域、频域、矢量-矩阵表达形式分别是: g(x,y)=d(x,y)*f(x,y)+n(x,y) G(u,v)=D(u,v)〃F(u,v)+N(u,v) g=HF+n 其中:g(x,y)、d(x,y)、f(x,y)、n(x,y)分别为观测的退化图像、模糊函数、原图像、加性噪声,*为卷积运算符,(x=0,1,2,…,M-1),(y=0,1,2,…,N-1)。 2运动模糊的产生 景物与相机之间的相对运动通常会使相机所成的像存在运动模糊。对于线性移不变模糊,退化图像u0可以写成,u0=h*u+n,其中h为模糊核,*表示卷积,n为加性噪声。 由du/dt=0,文献[5]将这种运动模糊过程描述为波动方程:
基于MATLAB的人脸识别
基于MATLAB的人脸识别
————————————————————————————————作者: ————————————————————————————————日期:
图像识别 题目:基于MATLAB的人脸识别 院系:计算机科学与应用系 班级: 姓名: 学号: 日期:
设计题目基于MATLAB的人脸识别设 计技术参数 测试数据库图片10张训练数据库图片20张图片大小1024×768 特征向量提取阈值 1 设计要求综合运用本课程的理论知识,并利用MATLAB作为工具实现对人脸图片的预处理,运用PCA算法进行人脸特征提取,进而进行人脸匹配识别。 工作量 两周的课程设计时间,完成一份课程设计报告书,包括设计的任务书、基本原理、设计思路与设计的基本思想、设计体会以及相关的程序代码; 熟练掌握Matlab的使用。 工作计划第1-2天按要求查阅相关资料文献,确定人脸识别的总体设计思路; 第3-4天分析设计题目,理解人脸识别的原理同时寻求相关的实现算法;第5-8天编写程序代码,创建图片数据库,运用PCA算法进行特征提取并编写特征脸,上机进行调试; 第9-12天编写人脸识别程序,实现总体功能; 第13-14天整理思路,书写课程设计报告书。 参考资料1 黄文梅,熊佳林,杨勇编著.信号分析与处理——MATALB语言及应用.国防科技大学出版社,2000 2 钱同惠编著.数字信号处理.北京:机械工业出版社,2004 3 姚天任,江太辉编著.数字信号处理.第2版.武汉:武汉理工大学出版社,2000 4 谢平,林洪彬,王娜.信号处理原理及应用.机械工业出版社,2004 5刘敏,魏玲.Matlab.通信仿真与应用.国防工业出版社,2005 6 楼顺天.基于Matlab7.x 的系统分析与设计.西安电子科技大学,2002 7孙洪.数字信号处理.电子工业出版社,2001 目录 引言?错误!未定义书签。 1 人脸识别技术?错误!未定义书签。 1.1人脸识别的研究内容?错误!未定义书签。 1.1.1人脸检测(Face Detection)........... 错误!未定义书签。
车牌图像分割matlab代码
图像分割matlab代码 作者:佚名发布时间:2010-1-1 阅读次数:498 字体大小: 【小】【中】【大】 % This is a program for extracting objects from an image. Written for vehicle number plate segmentation and extraction % Authors : Jeny Rajan, Chandrashekar P S % U can use attached test image for testing % input - give the image file name as input. eg :- car3.jpg clc; clear all; k=input('Enter the file name','s'); % input image; color image im=imread(k); im1=rgb2gray(im); im1=medfilt2(im1,[3 3]); %Median filtering the image to remove noise% BW = edge(im1,'sobel'); %finding edges [imx,imy]=size(BW); msk=[0 0 0 0 0; 0 1 1 1 0; 0 1 1 1 0; 0 1 1 1 0; 0 0 0 0 0;]; B=conv2(double(BW),double(msk)); %Smoothing image to reduce the number of connected components L = bwlabel(B,8);% Calculating connected components mx=max(max(L)) % There will be mx connected components.Here U can give a value between 1 and mx for L or in a loop you can extract all connected components % If you are using the attached car image, by giving 17,18,19,22,27,28 to L you can extract the number plate completely. [r,c] = find(L==17); rc = [r c]; [sx sy]=size(rc);