能力风暴机器人高级编程控制
能力风暴机器人高级编程控制
通过前面的学习,同学们对能力风暴机器人的结构和传感器已经有了比较全面的了
解,并且能够利用VJC系统编写可视化的流程图程序来控制机器人的动作,这对进一步学
习和研究机器人是非常重要的。
能力风暴机器人的编程方式有两种,即流程图方式和JC代码方式。流程图方式虽然
简单直观,但功能有限,如果要编写更复杂的程序,特别是进行机器人创意设计时,就需
要使用JC代码方式来编写程序了。
使用JC代码方式编程,将有利于我们进一步掌握计算机解决问题的思路和方法,更
深层次地理解机器人智能化的工作原理,为进一步研究和制作机器人奠定基础。
本章我们将通过VJC系统开发版软件,介绍如何在JC编程环境下直接使用JC 代码编写程序。同时还将结合国内外机器人大赛中的一些比赛项目,如:机器人灭火、机器人踢
足球、机器人创意制作等,引导同学们综合实践机器人项目编程控制的方法与全过程。
-78-
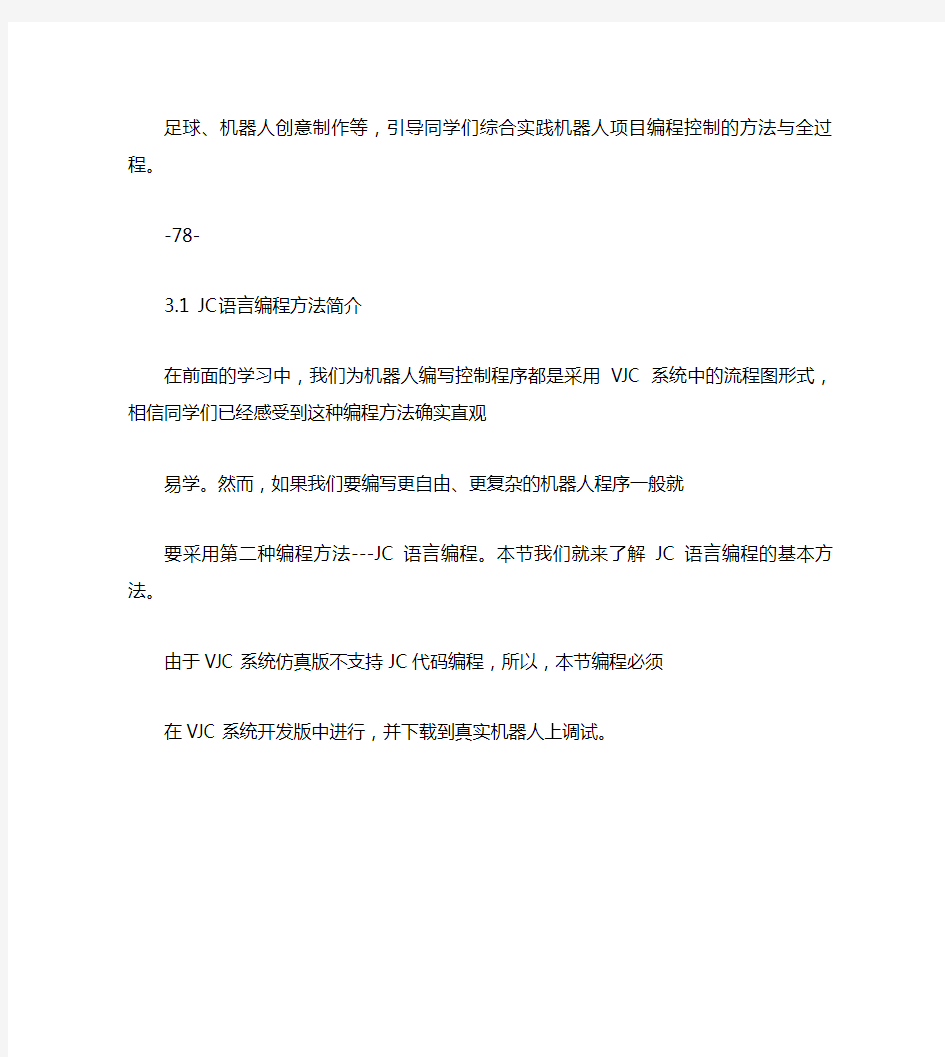
3.1 JC语言编程方法简介
在前面的学习中,我们为机器人编写控制程序都是采用VJC系统中的流程图形式,相信同学们已经感受到这种编程方法确实直观
易学。然而,如果我们要编写更自由、更复杂的机器人程序一般就
要采用第二种编程方法---JC语言编程。本节我们就来了解JC语言编程的基本方法。
由于VJC系统仿真版不支持JC代码编程,所以,本节编程必须
在VJC系统开发版中进行,并下载到真实机器人上调试。
3.1.1 JC编程的基本操作
1.进入JC编程界面
用JC语言编程时,首先要在计算
机中安装VJC系统开发版软件。启
动软件时,双击桌面上的VJC图标,
知识链接在VJC对话框中选择“JC代码程
序”,再单击“确定”按钮,就可进入
图3-1-1 VJC新建对话框 JC编程界面,界面组成如图3-1-2。
当机器人连
接在计算机上时,
在JC代码命令窗JC代码程序下载按钮编程方式切换按钮口可直接执行一条或若干条JC语
JC代码程序编辑窗口句,执行的结果将
显示在编译窗口
内。这一调试技巧JC代码命令窗口
常用于编辑时直
接测试某些命令
编译窗口语句的效果。
图3-1-2 JC语言编程界面
-79-
:流程图编程方式与JC代码编程方式可通过VJC工具栏
上的编程方式切换按钮进行切换,这种方式有利于初学者从流程图
编程方式起步,然后逐步过渡到用JC语言方式进行编程。
2.编辑JC语言程序
在JC代码编辑窗口内逐行用JC语句编写程序,每一句的后面
均可加入注释(注释内容放在“/* */”之间),便于阅读和修改。例如:下面就是一个用JC语言编写的控制机器人走正方形的程序。
知识链接
Main( )
一个JC语言
程序一般由一个
主函数(main( )
函数)和若干个自
定义函数组成。程
序的执行自动从
main( )函数开
始,在主函数的执
行过程中,可以调
用库函数,也可以
调用自定义函数,图3-1-3 机器人走正方形的JC程序
调用后还要返回分析上面的JC程序可以看出,编写JC程序有如下基本规定:到main( )函数,(1)一个JC程序至少有一个主函数,主函数说明语句一般是:在main( )函数中
void main( ) 结束整个程序的
其中:void为函数返回值类型,void类型表示该函数不返回值,运行。
main( )函其它返回值类型还有:int (整型)、float (浮点型)。main 为函数是系统定义的。数名,主函数一般均命名为main,自定义函数可命名为其它名称。
每个函数名后面必须有一对圆括号“()”,圆括号内可以定义函
数的参数。
(2)每个函数说明语句的下面都会有一对花括号“{ }”,用于
标出函数定义的开始位置和结束位置。
-80-
(3)在函数定义范围内是一系列用于控制动作、循环、判断
等的JC语句或库函数(JC的库函数请参看本书附录),每个JC语句后面必须以分号“ ;” 结束。
(4)如果在循环体或分支体内是一组语句,那么这组语句必
须包含在花括号“{ }”内。
3.下载调试
编辑好的JC程序可通过“下载”按钮下载到机器人中进行调试。
下载前首先按照1.2节阅读材料所述连接方法,将真实机器人
与计算机通过下载线正确地连接起来,然后打开机器人的电源开
关,再单击JC工具栏的“下载”按钮,就可将程序下载到机器人中。
如果程序编写无误,下载时系统会自动编译程序,并在编译窗
口内显示“编译成功”,同时弹出下载提示信息,如图3-1-4。如果程序编写有误,下载时在编译窗口内会显示相应的提示信息。
图3-1-4 下载提示信息
下载完毕后,拔掉下载线,将机器人放入调试的场地中,按下
机器人上的“运行”按钮,就可以运行或调试程序了。
3.1.2 JC编程的相关知识
用JC语句编程时,除了要熟记前面我们介绍的各模块对应的
JC语句或函数外,还应了解一些JC编程的相关知识。
1.常量
常量是程序运行过程中其值不能改变的量。JC中常量分为整型常量、长整型常量和浮点型常量。
-81-
(1)整型常量
常见的整型常量有以下几种形式:
十进制形式的整型常量:如:0、1、255、-1等;
二进制形式的整型常量:通常用“0b”作为前缀,如:0b1001001;十六进制形式的整型常量:通常用“0x”作为前缀,如:0x1abf;字符串型常量:字符串型常量是用双引号引起的一个或若干个
字符,如“a”、“abcd”;
整型常量的取值范围从-32768到+32767(十进制数)。
(2)长整型常量
在十进制整数后加上后缀“L” 就变成了长整型常量,其取值
范围从-2147483648到+2147483647(十进制数)。
(3)浮点型常量
浮点型常量是用小数形式或科学计数法表示的一类数,如:
81.24、2.543E+8,后者表示2.543×10。浮点型常量的取值范围从-383810到10。
在能力风暴机器人中因无浮点运算硬件,浮点运算要比整型运
算慢,所以尽量不要采用浮点运算。
2.变量
变量是程序中用于存放数据的量,它在程序运行过程中可以发
生改变。
(1)变量的命名
变量的命名一般由字母、数字、下划线字符组成(首字符必须
为字母),如:a、gi_1,但JC语言规定的专用词不能用作变量名,如:if、wait、drive等,此外,变量名和函数名也不能相同。(2)变量的类型
在JC程序中,变量的类型可分为整型(int)、长整型(long)、
浮点型(float)和字符型(char)。
(3)变量的定义
在JC程序中,要求变量必须先定义,后使用,通常变量定义
-82-
知识链接语句放在函数外或函数内块的起始处。变量定义语句的格式有两种:
<类型> <变量名>;
在一个定义<类型> <变量名>= <初始值>;
语句中,被定义的如:int gi_1=0;
变量可以是一个, float time;也可以是同类型
(4)局部变量的多个变量,但是
局部变量指在函数内部定义的变量(或函数的参数),它的作多个变量之间要用范围是局部的,即该变量只在该函数定义范围内有效。用逗号分隔。
(5)全局变量变量被定义
为某一类型后,其全局变量指在函数的外面定义的变量,如图3-1-3程序中的a
取值范围应当符变量。全局变量在该程序的所有函数范围内均有效。
合该变量类型。当局部变量与全局变量同名时,在该函数内系统会自动屏蔽全
局变量。为了避免产生混乱,一般多用局部变量,尽量少定义全局
变量。
3.运算符号及运算顺序
知识链接算术运算符:加法+,减法-,乘法*,除法/
关系运算符:大于>,小于<,等于==,大于等于>=,小于等
于<=,不等于!=
如果在程序位运算符:按位或 |,按位与&,按位异或^,按位取反~ 中用到逻辑运算,
逻辑运算符:或运算 | |,与运算&&,非运算 ! 总是把整数零作
对于多种运算混合的表达式,一般运算顺序是:为假(false),任
非运算?算术运算?关系运算?与运算和或运算。何非零值作为真
对于算术运算的顺序可概括为一句话:先括号、后函数、再乘(true)。除、最后加减。
4.屏幕显示函数及格式化字符参数
在前面的学习中,我们已经了解到屏幕显示函数主要用于输出
数据,语法格式如下:
printf ( 格式化字符串,[参数1],……[参数N]);
-83-
如:printf ( “max=%d \ n”,max) 表示显示字符串“max=”及其变量max 的值,其中%d表示以十进制数的形式显示,“\ n” 表示显示后光标自动换到下一行。我们将%d称作格式化字符,其它的
格式化字符见下表:
格式化字符数据类型说明
%d Int 十进制整数
%X Int 十六进制整数
%b Int 二进制数
%C Int ASCII字符
%f Float 浮点数
%S Char 字符串
【实践名称】JC环境下的编程与调试。
【实践目的】初步掌握用JC语言编写机器人控
制程序的方法。实践体验
【实践项目】试编写一段机器人在场地内听令出
发并自动走出迷宫的JC程序。
【实践步骤】
1. 项目分析:这个程序编写思路我们在前面已分步讨论过,
即:机器人听令出发后,采用左行规则划弧前进,不断检测左方和
前方是否有障(墙),遇到碰撞时,先后退一点,然后右转再继续
前进,直至到达迷宫出口。因为用JC编程,除了要启动VJC开发版软件进入JC编程环境外,还会用到许多JC函数、存放检测值的
变量以及循环结构和判断结构等,例如:
声音检测函数:microphone( ) ,碰撞检测函数:bumper()
红外检测函数:ir_detector(),单轮驱动函数:motor(1,100),双轮驱动函数:drive(-60,0)
2.编程与调试:
(1)启动VJC开发版,进入JC编程界面;
-84-
(2)在代码编辑窗口内逐行输入下列程序:
int Ir,bmp,mic=0; /*定义三个全局的传感变量*/
void main() /*定义主函数*/
{while (mic<80) mic=microphone(); /*循环检测声音*/
while(1)
{bmp=bumper();
if (bmp!=0) /*有碰撞,则倒退一点再右转前进*/
{drive(-60,0);wait(0.1000);stop();
drive(0,80);wait(0.2000);stop();
}
else /*否则检测前方是否遇到墙*/
{Ir=ir_detector();
if (Ir==4)
{drive(0,80);wait(0.2000);stop();}
else /*否则检测左方是否遇到墙*/
{if (Ir==1) {drive(0,80);wait(0.1500);stop();}
else /*无墙无碰时,按左行规则划弧前进*/
{motor(1,50);motor(2,100);wait(0.1000);}
}
}
}
}
(3)将机器人通过下载线与计算机连接起来,打开机器人电
源开关,单击VJC工具栏中的“下载”按钮,将程序下载到真实的机器人中;
(4)下载完毕时,拔掉下载线,将机器人放在真实的迷宫场
地,按下“运行”开关,并拍手发声,检验机器人能否走出迷宫。:如果用真实的机器人实践本程序,首先应调整红外检测
的距离,调整方法可参看相关的说明书。通过实际运行,再微调一下其它参数,如转弯的时间、速度等。如果无真实的机器人,则下
载调试这一步省略不做,只要理解并能在JC环境下编出程序即可。
-85-
(1)你能编写一段机器人自动寻光的JC程序吗?
(2)你能编写机器人绕标比赛的JC程序吗?试试
看,如有困难,先打开前面编写过的机器人绕标比
赛流程图程序,分析其对应的JC代码,然后再独练一练
立用JC语言进行编辑。
本节主要学习了能力风暴机器人的JC语言编程的基本方法。介绍了JC环
境的进入、界面组成以及如何编辑JC程序、如何下载JC程序等。另外还介绍了与JC编程相关的基础知识,如:常量、变量、运算符、表达式、运算顺序、
显示命令等。最后通过一个小实践项目,体验了JC编程控制机器人的全过程。
【反思评价】回顾本节学习内容,评价本节学习情况。
(1)我在本节学会了:
______________________________________________________
____________________________________________________________________ ____
(2)对于JC程序的基本格式及相关的基础知识:
我已理解并能运用 ? 初步理解 ? 还需进一步学习 ? (3)对照流程图程序:
我可以写出对应的JC代码程序 ?
我可以读懂对应的JC代码程序 ?
我还需要别人的帮助或提示才能读懂 ?
(4)用JC编程并控制机器人运行:
我已熟练掌握 ? 初步掌握 ? 还需进一步实践和研究 ?
-86-
阅读材料
北京时间1997年5月12日凌晨4时50分,当“深蓝”将棋盘上的兵走到C4位置时,卡斯帕罗夫推秤认负。至此轰动全球的第二次人机大战结束,“深蓝”以3.5:2.5微弱的优势取得了胜利。
那么“更深的蓝”是何许人也?卡斯帕罗夫又是何许人也?
“更深的蓝”是美国IBM公司生产的一台超级国际象棋电脑,重1270公斤,有32个大脑(微处理器),每秒钟可以计算2亿步。“更深的蓝”输入了一百多年来优秀棋
手的对局两百多万局。
卡斯帕罗夫是人类有史以来最伟大的棋手,在国际象棋棋坛上他独步天下,无人
能出其右。可是,在临近世纪末的1997年,孤独求败的卡斯帕罗夫不得不承认自己输
了,而战胜他的是一台没有生命力、没有感情的电脑。也许这是一件偶然的事件,可
是,这件事使人类看到了一个自己不愿看到的结果:人类的工具终于有一天会战胜自
己。
“深蓝”和卡斯帕罗夫曾于1996年交过手,结果卡斯帕罗夫以4:2战胜了“深蓝”。经过一年多的改进,“深蓝”有了更深的功力,因此又被称为“更深的蓝”。“更
深的蓝”与一年前的“深蓝”相比具有了非常强的进攻性,在和平的局面下也善于捕
捉杀机。
卡斯帕罗夫与“更深的蓝”的较量,引来了全世界无数棋迷和非棋迷的关注。人
们对此次人机大战倾注了巨大的热情,各种新闻媒体都竞相报道和评论此次人机大战,
显然不只是出于对国际象棋的热爱,事实上,许多关心比赛的记者和读者都是棋盲,
是因为这场比赛所蕴涵的机器与人类智慧的较量的特殊意义吸引了他们。
卡斯帕罗夫输掉这场人机大战在社会上引起了轩然大波,引出了两种不同的观点:
一部分人对此深感悲观,甚至惊恐不安,就像一些人对克隆技术感到可怕一样。另外
一些人则只是对这一结果感到不愉快,但他们认为这未必不是好事。首先,比赛的结
果不足以说明电脑就战胜了人脑,因为电脑的背后是包括美籍华裔谭崇仁、许峰雄等
一大批计算机专家。这些专家经过多年的努力,培养出来一个世界超级电脑棋手。电
脑的进步表明人类对人脑的思维方式有了更深入的了解。从科学意义上讲,人机大战
只是一项科学实验。其次,虽然电脑在棋盘上战胜了人类,但这并不会封杀国际象棋艺术,相反许多棋坛人士从人机大战中看到了国际象棋的新机遇。他们认为,如果在
-87-
今后的国际象棋比赛中,棋手们可以使用计算机,通过高科技手段检验我们认为天才
而又过分大胆的棋着。
不错,我们已经发明了比我们跑得快的、举得重的、看得远的机器,如汽车、起
重机、望远镜等,它们只能成为人类的一种工具,并没有影响到人的本质。人类发明
的机器或许可以分为两类:“体能机器”和“智能机器”。体能机器如汽车、飞机等,已经得到了公众的赞许,但智能机器却得到完全不同的反应。向来都自以为智商最高
的人类,却在智力游戏中输掉了,于是有人惊呼,今天我们输掉了最伟大的棋手,明
天我们还将输掉什么!
材料来源:中国科普博览网
-88-
能力风暴教育机器人暑期公益活动
能力风暴教育机器人暑期夏令营公益活动 第一部分:活动概述 能力风暴于1996年在全球首先创造了教育机器人这一品类,是教育机器人的开创者和领导者。能力风暴意义在于教育机器人是能力训练的最佳平台,它将激发出每个孩子内蕴的能力之风暴。因此,我们的梦想是“每个孩子拥有教育机器人,每个孩子拥有成功能力” 【活动名称】能力风暴教育机器人暑期夏令营公益活动 【活动时间】2017年7月——2017年9月 【活动主题】玩能力风暴练成功能力 【活动目的】每个孩子拥有教育机器人每个孩子拥有成功能力 【组织机构】能力风暴教育机器人体验中心 主办单位:WER赛事新疆选区伊犁组委会 承办单位:伊犁州教育局伊犁州科技局等 媒体支持:电视台广播媒体网络媒体平面媒体 【媒体传播效应】 在本次活动中,组委会将与企业共同建立一个面向全地州各类受众群体的媒体平台。
多家媒体全程参与,立体传播价值无限。 网络媒体:全面报道,强势宣传,公众平台,企业链接,活动专栏,网络推广; 平面媒体:跟踪专访,美誉传播,专家评论,活动报道,参赛须知,活动刊物; 口碑传播:广域影响,品牌保证,专家评委,家长参与,广泛参与,人物专访。 活动亮点: 一、品牌价值:高端品牌,权威主办、官方认可、主题鲜明、深入人心、影响广泛。 二、参与热度:数千名青少年儿童、上百家培训机构、八县一市区县选手、多场赛事活动 三、受众分析:一个孩子影响一个家庭。玩机器人的孩子其家庭收入也是不可小觑,属于市场主力购买人群,是各品牌客户数据库的中坚客户,优质人群! 四、推广平台:多优渠道,立体传播,深度结合。多元化的推广介质,深度结合的落地活动,属于完美打造的一首“企宣”进行曲。 五【活动节点及内容】 ★报名开始时间:2017年7月1日 ★报名截止日期:2017年7月30日 ★各市、县选拔赛: 2017年
信息技术-机器人教案
信息技术-机器人教案 第一课智能机器人登场 教学目标: 1.了解当今种类繁多的机器人家族 2.认识机器人的本领 3.认识仿真机器人 4.了解真实的机器人 教学重点:认识机器人的本领 教学难点:认识仿真机器人 教学时间:一课时 教学过程: 一、导入新课 同学们,我们猜个谜语好吗? 早晨,我们吃过早点上学以后,它立即用吸尘器清扫房间,用洗衣机洗涤我们换下的衣服。电话铃响了,它马上拿起耳机,在一张便条上记下对话内容。门铃响了,它并不急于开门,而首先问来访者是谁,然后根据来访者的声音仔细辨别他是不是主人的客人,以此决定是否开门。做晚餐的铃声响了,它走进厨房,熟练地焖米饭、炒菜,为我们准备可口的饭菜。门铃又响了,一听那熟悉的声音,它就知道是主人下班回来了,马上开门迎接……你知道它是谁吗?生答,师总结。那么今天我们就来一起认识一下,我们的新朋友——智能机器人。学生通过预习,查找资料来回答问题。 学生自己看书认识。 二、了解当今种类繁多的机器人家族。 同学们,你们知道吗?机器人技术作为20世纪人类最伟大的发明之一,自60年代初问世以来,经历40余年的发展已取得长足的进步。还有谁知道其他有关机器人的知识,说出来大家一起分享一下?生答。 三、认识机器人的本领 你想更多地了解机器人吗?你想探索机器人世界的秘密吗?让我们一起进入机器人世界,共同探索机器人世界的奥秘吧!老师给同学们几个网址大家一起去看看机器人到底有多神奇,let’s
go! 机器人世界: https://www.360docs.net/doc/7c844817.html,/sjdw/works/robot/In 机器人博览:https://www.360docs.net/doc/7c844817.html,/gb/technology/robot/index.html 看到这么多有关机器人的资料,同学们你来想象一下,未来机器人长什么样子?会干些什么?好在课本上写下自己的想象。 下面,我们就一起认识一下我们身边的机器人朋友“智能宝宝”(展示机器人) 四、认识仿真机器人 我们将要学习的是仿真机器人。SVJC就是机器人的仿真系统,它是为仿真机器人定制的编程工具。宇航员遨游太空之前,都是先在虚拟仿真的太空环境下进行练习的。许多大型工程在动工之前,也都是在虚拟仿真的环境中进行测试论证的。SVJC就拥有一个功能强大的系统仿真模块,可以创建和真实的机器人功能相当的虚拟智能机器人。 师:展示智能宝宝的本领 1.单击“打开”按钮。 2.选择C:\SVJC\sample中的“自由行走”程序,单击“打开”按钮。 3.单击“仿真”按钮 4.双击“标准灭火场地”,进入系统仿真活动场地。 5.找到并单击智能宝宝,将它拖放到仿真活动场地中。 刚才我们学习了虚拟仿真机器人的一些知识,可能有些小朋友手中有真正的机器人,下面我们以“能力风暴”AS-MII型机器人为例向大家简单介绍一下。 五、了解真实的机器人 机器人的模样? 机器人各个部位? 同学们可以看书也可以看老师这里的机器人来观察分析一下。你能说出仿真机器人和真实机器人的相同和不同之处吗? 师总结:同学们今天我们认识了机器人及我们新朋友:“智能宝宝”,可算是收获不小。他的本领可大,这节课,你们先自己研究,下节课我们接学习他的本领。 教后记
机器人认识实验实验报告
机器人认识实验实验报告 一、实验目的: 认识能力风暴机器人的基本结构。学会能力风暴机器人的连接、检测和程序下载等操作。 二、实验要求: 1、可以明确能力风暴机器人的各个组成部分。 2、指出主要组成部分的结构和功能。 3、学会程序的调试和下载。 三、实验内容、步骤: 1、记录自检程序运行的结果,回答每一步用到的传感器和执行器。 2、记录表演程序运行的结果,回答每一步用到的传感器和执行器。 3、完成机器人输出”Hello Robot”的编程。 4.、完成机器人走正方形编程。 四、实验代码: 程序1: #include "AS_UIII_LIB.h" void main() { printf(“Hello Robot!”); } 程序2: #include "AS_UIII_LIB.h" void goon(int s,float f) { drive(s,0); wait(f); stop(); } void tr() { int rot2; rot2=rotation(2); drive(0,10); while(rotation(2)-rot2<19) {} stop(); }
void tl() { int rot1; rot1=rotation(1); drive(0,-10); while(rotation(1)-rot1<16) {} stop(); } void main() { int i; for(i=4;i>0;i--) { goon(75,1); wait(0.5); tl(); } } 五、实验结果: 1、对于程序1,机器人的LCD液晶屏幕显示Hello Robot! 2、对于程序2,机器人大致上走了一个正方形。 六、实验小结: 通过这个实验我学会了用VJC编写机器人程序的过程,为进一步学习打下基础。
13简介能力风暴机器人仿真系统
13简介能力风暴机器人仿真系统 1.3 简介能力风暴机器人仿真系统 学习智能机器人,除了需要具备机器人硬件外,还需要为机器人编写控制程序,并在场地上进行反复调试。但如果手边暂时既无机器人实物,又无真实场地,我们还能学习和研究机器人吗,答案是可以的。能力风暴机器人为我们提供了一套仿真的VJC系统软件,在这个仿真系统中,我们不仅可以为机器人编写各种控制程序,同时还可以将编制的程序下载到仿真的机器人上,并在仿真的场地中进行模拟运行和调试,体验机器人控制的全过程。本节我们就来认识VJC系统仿真版软件,学习构建仿真场地和仿真调试的方法。 1.3.1 认识VJC系统仿真版软件 1(VJC系统仿真版软件的安装 安装VJC系统仿真版的方法很简单,先打开本书配套光盘上的 ”文件夹,找到名为“setup.exe”“VJC系统软件\VJC1.5仿真版 的安装程序,用鼠标双击该文件,系统自动将其安装到C盘中,并在Windows 桌面上自动生成一个“VJC1.5仿真版”的快捷方式 \program files\VJC1.5仿真版。图标,软件安装的路径默认为:C: 如果我们使用的计算机中已经安装了VJC系统仿真版,则安装这一步可以跳过不做。 2(VJC系统仿真版软件的启动及主界面 当需要进入VJC系统仿真版编程时,只要双击桌面上的“VJC1.5仿真版”快捷方式图标,就可进入VJC的编程环境。 VJC编程环境的主界面见图1-3-1。可以看出,主界面包含了以下几个部分:
(1)菜单栏及工具栏:位于窗口上方,工具栏上除了新建、打开、保存等常规按钮外,还有仿真、JC代码、缩放等按钮,见图1-3-2所示。 (2)模块库:位于窗口左侧,共有五大类模块库,其中:执行器模块库包含了基本动作模块,这是控制机器人运动的基本模 -22- 块;传感器模块库包含了基本的传感器检测模块,如:“红外检 测”、“碰撞检测”等,用于感知周围的环境信息;控制模块库包 含了循环、分支等程序控制模块,用于控制程序的结构;程序模块 库包含了新建子程序、结束图标等;AS多功能扩展卡包含了扩展应 用的一些功能模块。 工具栏 模块库 JC代码显示区 知识链接垃圾箱流程图编辑区 流程线
智能机器人的现状和发展趋势
智能移动机器人的现状和发展 姓名 学号 班级:
智能移动机器人的现状及其发展 摘要:本文扼要地介绍了智能移动机器人技术的发展现状,以及世界各国智能移动机器人的发展水平,然后介绍了智能移动机器人的分类,从几个典型的方面介绍了智能移动机器人在各行各业的广泛应用,讨论了智能移动机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能移动机器人方面发展并提出期望。 关键词:智能移动机器人;发展现状;应用;趋势 1引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能移动机器人则是一个在感知 - 思维 - 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能移动机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能 力。智能移动机器人与工业机器人的根本区别在于,智能移动机器人具有感知功 能与识别、判断及规划功能[1] 。 随着智能移动机器人的应用领域的扩大,人们期望智能移动机器人在更多领 域为人类服务,代替人类完成更复杂的工作。然而,智能移动机器人所处的环境 往往是未知的、很难预测。智能移动机器人所要完成的工作任务也越来越复杂; 对智能移动机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对 智能移动机器人的研究不断深入。 本文对智能移动机器人的现状和发展趋势进行了综述,分析了国内外的智能 移动机器人的发展,讨论了智能移动机器人在发展中存在的问题,最后提出了对 智能移动机器人发展的一些设想。 1
《机器人走图形》教学设计(一等奖)
《机器人走图形》教学设计(一等奖) 设计思路:《机器人走图形》这节课我是分以下几步去设想的:机器人走图形这节课以学生的研究活动为主体,以研究机器人走图形为主线,在课上设计个研究任务:机器人走直线,让学生学会用执行器模块库中的直行模块编写程序,通过调整该模块的速度和时间参数值,让机器人走得距离再长一些;机器人转弯,让学生学会用执行器模块库中的转向模块编写程序,通过调整该模块的速度和时间参数值,让机器人转向自如;机器人走正方形。 由出示课件,引导学生分析问题,巩固和提高前面学过的知识,进一步体会调整两个模块的参数的方法,让机器人行走的更自如。 在本节课中,通过让机器人走直线学转弯走正方形等不同层次的任务设计,完成对学生知识能力的教学。 培养学生归纳与总结的能力,培养学生语言表达的能力。 在任务教学环节中,教师在鼓励学生探究的同时比较具体的引导学生学会设置直行模块的参数。 在任务教学环节中,培养学生的知识迁移能力,引导学生利用已有的经验和方法自己进行上机尝试并学会转向模块的参数设置。 通过调试两个模块的参数,让学生体会运用两分法解决问题的好处。 在拓展练习中,给学生留有一些空间,充分发挥其自主性,让学生自己去探究去创新,让机器人走出形状不同的图形,让不同层次的
学生都能体验成功的快乐。 在编写和调试程序的过程中,让学生充分体验编写程序的目的是要让机器人听人的指挥,能够控制机器人,以进一步激发学生的学习兴趣,提高学生分析问题解决问题的能力,培养学生的创新意识。 《机器人走图形》课后反思《机器人走图形》这节课较好地完成了教学目标。 机器人走图形这节课以学生的研究活动为主体,以研究机器人走图形为主线,在课上设计个研究任务。 机器人走直线,让学生学会用执行器模块库中的直行模块编写程序,通过调整该模块的速度和时间参数值,让机器人走得距离再长一些;机器人转弯,让学生学会用执行器模块库中的转向模块编写程序,通过调整该模块的速度和时间参数值,让机器人转向自如;机器人走正方形。 由出示课件,引导学生分析问题,巩固和提高前面学过的知识,进一步体会调整两个模块的参数的方法,让机器人行走的更自如。 从整个完成的教学效果看,这节课改变了课堂的一惯模式,充分体现了学生的主体性和创新精神,鼓励学生自己去尝试。 我通过任务驱动探究式学习的教学方法,达到了这一目的,完成了预定的教学目标。 在学习过程中引导学生注意观察发现问题,分析和讨论问题,使学生在知识技能和情感等方面得到全面的发展。
能力风暴机器人常见问题参考答案
思考题 ?红外测距卡的测量范围及原理。 答:红外测距卡可以精确地测量10cm~80cm范围内障碍物的距离。 红外测距卡,顾名思义就是用红外光进行物体距离的检测。它分为一个模拟口的转接卡和红外测距传感器两部分。通过测量发射和反射红外光之间的相位差来测量物体的距离。红外测距卡能够把相位差的变化转化为输出电压的变化,输出电压可以通过红外测距的信号线接到微控制器的A/D转换口上。 ?多智能体通信的方式是什么? 答:多智能体通信主要有三种通信方式:直接通信,强信号通信,黑板通信。 (1)直接通信:是指信息发送方智能体直接将信息传送给接受方智能体,执行过程中没有缓冲。 (2)强信号通信:是指当一个智能体发送消息时,实际上是将信息向整个系统或环境发送,并且信息的强度随距离的增加而减少,这样靠近信号源的智能体对信息的反应最强。 (3)黑板通信:是通过存取一个公用数据区以达到交换信息的目的。 ?简述机器人无线控制的实现过程。 答:计算机通过电平转换装置与一个无线收发模块相连,而机器人本身带有无线收发模块,机器人的无线收发模块与它自己的微处理器有信号线相连。这样计算机处理器和机器人微处理器之间就可以通过这两个无线收发模块实现通信,这种通信方式是双向的,计算机可通过程序指令控制机器人的行为,机器人也可以借助计算机处理复杂的信息。 ?简述基于视频技术的野外探险机器人系统的硬件结构及实现过程 答:系统硬件结构:从总体上分为机器人和上位机(计算机)。其中机器人部分包括AS无线摄像机和微功率无线通讯模块,上位机部分包括视频采集卡和微功率无线通讯模块。 实现过程:机器人上的无线摄像机通过摄像获取各种现场环境参数,通过机器人和上位机上的两个微功率无线通讯模块实现数据和控制信号的传输,从而AS无线摄像机的接收模块的视频输出接到了视频采集卡的视频输入端,因而机器人能自主运动,也能通过上位机的人机交互式进行控制。 ?机器人上程序不能正确下载的原因有哪些? 答:主要有以下原因:操作系统崩溃、机器人死机、操作系统不正常、下载过程中按下复位键、型号不匹配、下载端口接触不良、下载线或端口已坏。 ?同步进程的处理原则是什么?如何利用同步进程的处理原则编写机器飞蛾程序?答:所有同步进程应该遵循以下四条原则: (1)空闲让进:当一个临界资源处于空闲状态时,允许一个请求进入临界区的进程立即进入自己的临界区。 (2)忙则等待:当已有进程进入自己的临界区时,其它试图进入临界区的进程必须等待,以保证进程互斥地访问临界资源。 (3)有限等待:对要求访问临界资源的进程,应保证进程能在有限时间进入临界区,
智能机器人论文
智能机器人的发展与应用前景 摘要 本文介绍了智能机器人的发展概况、机器人的感官系统、机器人运动系统及人工智能技术在机器人中的应用,智能机器人是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。 关键词: 智能机器人感官仿生人工智能 1.引言 人们通常把机器人划分为三代。第一代是可编程机器人。这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从60年代后半叶开始投入实际使用的,目前在工业界已得到广泛应用。第二代是“感知机器人”,又叫做自适应机器人,它在第一代机器人的基础上发展起来的,能够具有不同程度的“感知”周围环境的能力。这类利用感知信息以改善机器人性能的研究开始于70年代初期,到1982年,美国通用汽车公司为其装配线上的机器人装配了视觉系统,宣告了感知机器人的诞生,在80年代得到了广泛应用。第三代机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业,称之为智能机器人。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。而感知本身,就是人类和动物所具有的低级智能。因此机器的智能分为两个层次:①具有感觉、识别、理解和判断功能; ②具有总结经验和学习的功能。所以,人们通常所说的第二代机器人可以看作是第一代智能机器人。 2.智能机器人的感官系统 2.1触觉传感器 英国近几年在阵列触觉传感方面开展了相当广泛的研究。例如:Sussex大学和Shack-leton系统驱动公司研制的基于运动的介电电容传感的阵列;由威尔士大学和软件科学公司研制的采用压强技术的装在机器人夹持器上的传感器。 2.2视觉传感 在机器人视觉方面,目前市场上销售的有以下6类传感器:①隔开物体的二维视觉:双态成像;②隔开物体的二维视觉:灰度标成像;③触觉或叠加物体的二维视觉;④二维观察;⑤二维线跟踪;⑥使用透视、立体、结构图示或范围找寻技术从隔开物体中提取三维信息。在这类系统方面,它们只能做一些很简单的操作。例如:为了使机器人具有某种程度的人眼功能,已进行大量的研究工作并向如下两类系统发展:①从一维物体中提取三维信息;②活动机器人导航、探路和躲避障碍物的现场三维分析。伦敦大学目前正在研究一种双目视觉机器人的实时图像处理机。还有正在研究机器人视觉系统的教育机构有:考文垂工业大学、爱丁堡大学、格拉斯哥大学、格温特大学;而伯明翰大学则专门研究惯性传感器。另外,还有许多从事传感系统开发的单位,都进行了传感反馈研究。如米德尔塞克斯工业大学致力于使机器人能组织和使用来自不同类型传感器的数据。这种机器人能“看”、“感”和“听”,它更接近于人。 2.3听觉传感
搜救机器人实验报告
南昌航空大学开放型实验报告 年月日 课程名称:开放型实验实验名称:搜救机器人的组装与控制 班级:学生姓名:学号: 指导教师评定:签名: 一、实验目的(实验设计要求) 1.掌握红外传感器、火焰传感器、地面灰度传感器; 2.了解搜救机器人的硬件结构; 3.模拟现实世界中的搜救情景,能够自行设计搜救机器人的控制程序 4.多学科交流、启发学生创新性思维,模拟现实世界中的搜救情景,使机器人完成搜救任务。 5. 设计程序使机器人能够自动开始直线向前匀速行驶并在行驶一段距离后自动停止。 6.设计程序使机器人能够自动开始沿矩形边框走一圈回到原点并停止。 二、实验仪器 搜救机器人;红外传感器、火焰传感器、地面灰度传感器若干。 三、实验原理 学会使用能力风暴 “能力风暴”智能机器人是为培养在校学生动手能力和创造力.协作能力而推出的开放式机器人平台,融合了现代工业设计.机械.电子.传感器.计算机和人工智能诸多领域的先进技术。能力风暴的活动器官是执行具体功能(如说话.走路等)时所要用到的部件。 ⑴主板--能力风暴的大脑 位于能力风暴心脏部位的控制部件是能力风暴的大脑--主板,由中央处理器(CPU)存储器(RAM)数据总线和输入输出口以及外围接口电路所组成。 跟人的大脑一样,它在控制机体运动的时候,要完成接受信息、处理信息、发出指令等一系列过程。能力风暴的大脑有记忆功能,这主要由主板上的内存实现,至于大脑的分析、判断、决策的功能则由主板上的众多芯片共同完成。 ⑵传感器--能力风暴的眼睛 能力风暴有3只眼睛,它们由传感器组成。①能力风暴的双眼--红外传感器。能力风暴的红外传感器能够和人的眼睛一样,在遇到前方有障碍物时,将信息反馈给大脑,再由大脑通知行走部件,避开障碍物。人的眼睛有一定的可视范围,能力风暴的眼睛也一样。能力风暴的眼睛看到前方10~80厘米、90度范围内的比210毫米*150毫米的大障碍物。如果障碍物太小太细,或者在它的可视范围以外,它可就没法就看到了。在能力风暴的可视范围内,它的可视距离是可以调整的。②能力风暴的第3只眼睛--地面检测传感器。能力风暴有第3只眼睛,如果说前面两只眼睛起到探知外界环境以躲避外界障碍的作用,那么这第3只眼睛就是利用外界环境提供的不同信息,按照控制要求,执行相应的动作。
能力风暴机器人仿真系统备课教案
第一课 教学机器人 一、教学目标 帮助学生了解机器人的由来 二、重点难点 使学生理解机器人是靠什么来思考,机器人的部分。 三、教学过程: 第一课时 机器人的故事 新课导入 “robot”一词源出自捷克语“robota”,意为“强迫劳动”。1920年捷克斯洛伐克作家萨佩克写了一个名为《洛桑万能机器人公司》的剧本,他把在洛桑万能机器人公司生产劳动的那些家伙取名“Robot”,汉语音译为“罗伯特”,捷克语意为“奴隶”——萨佩克把机器人的地位确定为只管埋头干活、任由人类压榨的奴隶,它们存在的价值只是服务于人类。它们沒有思维能力,不能思考,只是类似人的机器,很能干, 以便使人摆脱劳作。它们能生存20年,刚生产出来时由人教它们知识。它们不能思考,也有感情,一个人能干三个人的活,公司为此生意兴隆。后来一个极其偶然的原因,机器人开始有了知觉,它们不堪忍受人类的统治,做人类的奴隶,于是,机器人向人类发动攻击,最后彻底毁灭了人类。“机器人”的名字也正式由此而生。 新课讲授 第一代机器人只能用手抓取东西,用脚行走,听“懂”主人的语言,做一些重复性的机械动作。人们把它称为工业机器人。现在,机器人经过好几代的更新改造,已经能和人们自由交谈,沟通语言,并灵活地走动。也就是说,它不仅有了听觉、视觉、触觉,而且还具有记忆、学习、思维和判断能力。人们把新一代的机器人称为智能机器 人。 明天的高级智能机器人将比今天的智能机器人具有更丰富的感觉功能和更熟练的活动能力。到那时,家庭里将有服务周到、态度和蔼可亲的家庭机器人。早晨,主人吃过早点上班以后,它立即用吸尘器清的房间,用洗衣机洗涤(dí)主人换下的衣服。电话铃响了,它马上拿起耳机,在一张便条上记下对话内容。“哇——”摇篮里的婴儿醒了,它又像慈祥的母亲一样抱起婴儿,喂水、喂奶,轻声哼(hēng)起一支 优美动听的催眠曲,把婴儿再一次送入梦乡。门铃响了,它并不急于开门,而首先问来访者是谁,然后根据来访者的声音仔细辨别他是不是主人的客人,以此决定是否开门。即使是盗贼的恐吓,它也不会害怕,而是声色俱厉地高喊:“快走,你这个无赖(lài)!再不走,我要报警了!”盗贼听到这喊声,只好胆战心惊地走开。做午餐的铃声响了,
人工智能机器人发展应用
随着“机器替人”在我国的进一步推进,不仅工业机器人的增速突飞猛进,服务机器人市场也开始出现大爆发,这种爆发一方面来自于国家陆续出台的产业扶植政策,另一方面也因为资本市场的逐渐活跃。因此,不管是上市公司还是初创型企业,都将眼光转向了服务机器人领域。在此背景下,传统的物业管理领域开始了“机器替人”的进程。 近年来,中国的经济飞速增长,劳动力成本也日渐水涨船高,物业管理人员工作繁重,重复性劳动过高,人员流失率大,从业人员素质不高等问题一直困扰着物业管理行业的发展。与此同时,人们对物业服务的要求也变得越来越高,智慧社区、智慧楼宇不仅逐渐成为高档小区的“标配”,也成为了未来社区发展的“终极目标”。机器人在这个过程中发挥了其不可替代的作用。 11月22日,国际房地产顾问“五大行”之一戴德梁行在和人工智能独角兽深兰科技举行签约仪式,戴德梁行亚太区董事局主席暨大中华区行政总裁张国正表示:未来,房产、物业要做到大多数的物业服务用机器人替代。随着人工智能技术的不断进步,像安全检查、访客管理、保洁巡逻、设备检查等多项物业服务都能用智能机器人完成,不仅提升了日常工作效率,也让物业公司大量节省了成本。 笔者观察发现,目前物业机器人主要应用在三大领域,分别是出入管理及接待、自动清洁以及自动巡逻。 生物智能系统:提升出入管理效率及服务体验 不管是小区物业还是写字楼场景,出入管理往往是最耗费时间的环节。陌生人如果要拜访小区或写字楼,往往需要登记身份证并进行核实,再由物业管理人员发放门禁卡。如果碰到前台服务人员过少,或一时之间有多人需要登记的情况,往往需要花费许多时间。若此时再遇上物业服务人员需要解决住户问题,或者还在接电话的情况,这个过程需耗费的时间就更长了。而生物智能管理系统则能很好的解决这个问题。 以深兰科技的手脉设备为例,这是一款用于解决写字楼楼宇、小区物业出入口、大堂单元楼、企业前台等门禁管理系统的手脉闸机。它采用了红外线照射手掌内部毛细血管分叉结构记录,用250位数字加密,识别速度快,并且精准度极高。用户只需通过扫描身份证便可完成验证,同时加载了大数据云端架构等技术,能够实现智能门禁、全景安全监控、智慧考勤等功能。据深兰科技市场品牌部丁先生介绍,深兰的手脉识别系统不仅可用于企业前台及公司门禁管理、自动化考勤及数据表单生成、写字楼、公寓、住宅门禁管理等场景,而且可以用于刷手购物,刷手坐地铁,刷手开车门等生活的方方面面。 类似手脉设备的物业机器人主要解决了三个问题:一是大大提升了人员进出的效率,二是节省了物业公司的人力成本,三则减少了业主与物业之间的矛盾。也正是因为这种人工智能技术能够真正解决行业痛点,不管是以绿地、永旺为代表的房产企业,还是类似雅乐居这样的物业服务公司,还是戴德梁行这样的全球领先地产服务商,都已将“机器替人”提上日程。 智能清洁机器人:提升清洁效率,降低运营成本 在物业清洁领域,重视劳动力的全人工时代早已过去,不少小区或者楼宇已经过渡到了人机协作的半自动化时代。而无人驾驶技术的出现,为劳动力的彻底解放带来“希望的曙光。” 成立于2013年的高仙机器人便是一个典型的例子,这是一家从事自主移动技术研发和应用探索的机器人企业,其生产了很多种类的无人驾驶洗地机。与传统清洁手段相比,这种能够自主移动的智能清洁机器人极大地提升清洁效率。
能力风暴机器人结题报告
编号:201301143 哈尔滨工业大学 大一年度项目结题报告 越野避障机器人的研究项目名称: 项目负责人:学号: 联系电话:电子邮箱: 院系及专业: 指导教师:职称:
联系电话:电子邮箱: 院系及专业: 哈尔滨工业大学基础学部制表 填表日期:2014年7 月9日1 一、项目团队成员(包括项目负责人、按顺序) 二、指导教师意见
三、项目专家组意见 四、项目成果 1
摘要 自从我们小组确定了《越野避障机器人的研究》这一科创项目后,以小组合作的形式进行了为期一学期的学习,主要针对其中的控制系统进行测试与运行。我们学习了传感器的使用以及相关运动指令的编程,并达到了预期效果。目前,我们能初步的控制机器人使之按照预定程序有效避障,课题目标基本达成,并采用实例展示。 有效避障运动编程关键词:避障机器人 (一)课题背景 1.项目意义 自从1959年世界上诞生了第一台机器人以来,机器人技术取得了长足的进步和发展至今已发展成为一门综合性尖端科学。机器人技术的发展集成了多学科的发展成果,代表高技术的发展前沿,是一个国家高科技水平和工业自动化程度的重要标志和体现。 随着计算机技术和遥控技术的迅猛发展,机器人正向多功能、多领域、智能化方向发展,各种用途的机器人如仿生机器人,灭火机器人,越野机器人等已开始研发、生产、应用并取得了不错的效果。而在近期发生的一系列自然灾害中避障探路机器人更是发挥了重要的作用。作为越野机器人的一个重要分支,它是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,能够在大范围运动,广泛的为人类承担各种任务,不只是搜救,更能完成深海地貌分析等多种任务。因此对越野机器人的避障技术研究无疑具有现实意义。 2.研究现状 随着计算机技术、传感器技术的发展和进步,避障探路机器人向实用化、智能化、系列化进军,日本、德国、美国都取得了各方面的先进研究成果。我国的研究从八五期间开始,至今在清华大学,哈尔滨工业大学,中科院自动化所,浙江大学等都取得了可喜的研究成果。目前,我国避障探路机器人的研究发展水平还和发达国家有一定的差距。 避障探路机器人的研究一直是一个重大的主题,它要求机器人必须能在具有障碍物的复杂环境中完成局部在线避障,需要解决三个重要问题:障碍物在空间的位置方向的精确检测;所获信息的分析和环境模型的建立;使机器人安全避障的策略。目前机器人的环境建模方法有以下几种: 可视图法(VGraph):由Nilsson在1968年提出的,其算法简单且能找到最短路径,但是由于其缺乏灵活性,在障碍物较多时,搜索时问将会很长并且要求障碍物的形状不能接近圆形,因此现在限制了其实际的应用。进而现在通常采用基于切线图法(Tangent Graph)和Voronoi法的改进可视图法。 栅格法(Grid):由W.E.Howden在1968年提出的,是目前研究较广泛的路径规划方法。其中栅格的大小影响着环境信息存储量的大小和时间的长短。栅格划
人工智能时代工业机器人的发展趋势
人工智能时代工业机器人的发展趋势 随着社会的飞速发展,科学技术不断进步,工业领域生产模式发生变化,人工智能时代势不可挡,尤其是机器人得到更大范围的推广与应用。工业机器人的突出优势是精准度较高,工作效率高,能够承受较大工作强度,为整个工业领域产量的提升以及质量的提高创造更加优质的条件。由此可见,工业机器人已成为现代工业发展的趋势与方向。文章基于行业发展,详细阐述了工业机器人的特征,探讨其未来发展趋势与方向,以期为整个工业行业的持续性发展提供更大的技术支撑。 标签:人工智能时代;工业机器人;趋势 Abstract:With the rapid development of society,the continuous progress of science and technology,industrial production mode changes,the era of artificial intelligence is unstoppable,especially the robot has been more widely promoted and applied. The outstanding advantages of industrial robots are high accuracy,high work efficiency,able to withstand a greater intensity of work,for the entire industrial field of production and quality improvement to create more high-quality conditions. Thus it can be seen that industrial robot has become the trend and direction of modern industrial development. Based on the development of the industry,this paper expounds the characteristics of the industrial robot in detail,and discusses its future development trend and direction,in order to provide greater technical support for the sustainable development of the entire industrial industry. Keywords:era of artificial intelligence;industrial robot;trend 隨着人工智能时代的到来,互联网技术取得巨大突破,大数据技术成为核心,为工业机器人产品性能的提升提供更加先进的技术支持。在工业机器人发展进程中,其操作趋于简易化,精准度更高,能够广泛应用在诸多领域,投入成本呈现不断降低的趋势。立足工业领域,机器人应用于产品检测、焊接以及搬运等环节。工业机器人的出现强化对人力应用的缓解,在优势上主要体现为较高的生产效率与较高品质的操作,同时,操作持久性更加突出。 1 工业机器人的构成以及类型 从构成上分析,工业机器人主要包含三个部分,即本体、驱动以及控制三个系统。从功能上分析,一种机器人的作用体现在对人类手、手臂的模仿。另外一种更具智能化,有效发挥仿生学的特征,能力更显多样化,自由度更高。在当前的工业领域,之所以选择工业机器人,主要源于其较低的单机价格,便于维修,应用效率较高。 2 人工智能时代工业机器人核心技术分析
交互式JC能力风暴机器人
实验一机器人认识实验 实验目的: 认识能力风暴机器人的基本结构。 学会能力风暴机器人的连接、检测和程序下载等操作。 实验要求: 可以明确能力风暴机器人的各个组成部分。 指出主要组成部分的结构和功能。 学会程序的调试和下载。 实验内容、步骤: 1、运行自检程序,说明每一项自检内容。 2、机器人表演程序包含6 个程序,说明每一项表演内容及每一项使用的传感器。 3、自己编写程序。在LCD上显示“HELLO”? 验证一: 1. LCD 液晶显示是否正常? 字符显示清晰,16×2 个字符不应有缺行、缺列现象。 2. 扬声器(喇叭)是否正常? 扬声器所播放的乐曲应清晰洪亮,无明显噪声。 3. 光敏传感器是否正常? 左右光敏传感器的感应数值随光强不同而变化,其范围为0~255。光强越弱,数值越大,
光强越强,数值越小。在相同光强条件下,左右两光敏传感器数值偏差小于10。 如:(photo L172 R210 )表示左边的光线强。 4. 红外传感器是否正常? 在前方10cm~80cm 范围内,有A4 纸大小的障碍物时,在LCD 上会有“<<<<”符号显示,并指明障碍物所在的方位(左前、右前或者正前)。 如: <<<< IR Test 表示机器人左前方有障碍。 5. 话筒是否正常? 对着AS-UII 话筒槽孔(蜂窝状小孔)说话,看LCD 上的 > 是否增加。 6. 碰撞传感器是否正常? 按动机器人下部的碰撞环,在LCD 上能显示碰撞方位。 7. 运动系统是否正常? 机器人可移动、转弯,同时在LCD 上显示光电编码器累计计数值和瞬时电机转速。 如:Motor 30 L 100 Test 31 R 100 表示左电机速度100,右电机速度100,左轮转过30 个单位,右轮转过31 个单位。 8. 光电编码器是否正常? 机器人左、右轮子分别转动1 圈,轮子内侧码盘也随之转动1 圈,LCD 上显示光电编码器的计数值约为 33。轮子连续转动,LCD 上则显示光电编码器的累计计数值。。 自检程序全部完成后,按一下复位键,机器人就会停止运行。最后关闭电源开关。也可以不按复位键,直接关闭电源开关。 验证二: 机器人表演程序包含6 个程序,说明如下: (1) 电子琴 Piano―――从不同的方位触动碰撞环,机器人会发出不同的声音。此次表演应用了碰撞传感器。 (2) 声与光 I'm in dark―――在明暗不同的光线下,机器人会发出不一样的叫声。此次表演用了光敏传感器。 (3) 跟我走 Follow―――机器人会跟着前方的物体走。此次表演用了红外传感器。 (4) 回声 Echo―――您叫机器人一声,机器人就会回应一声。此次表演用了麦克风。 (5) 走向亮光 Goto light―――如果房间里点着一支蜡烛,机器人就会向蜡烛走过去,此次表演用了光敏传感器。 (6) 三步舞 I'm dancing―――机器人还会跳舞呢,欣赏一下吧。此次表演用了碰撞传感器。
人工智能机器人论文
人工智能机器人论文 Prepared on 24 November 2020
《人工智能》课程报告 题目:机器人 学院:机电学院 专业:自动化 班级:二班 学号: 姓名:汪乾梁 指导教 师:姜丽莉 二〇一七年十一月二日 机器人 摘要:人工智能(Artificial Intelligence) ,英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,
它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式作出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。 关键词:人工智能;感官;仿生;机器人 1.前言 人们通常把机器人划分为三代。第一代是可编程机器人。这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从60年后半叶开始投入实际使用的,目前在工业界已得到广泛应用。第二代是“感知机器人”,又叫做自适应机器人,它在第一代机器人的基础上发展起来的,能够具有不同程度的“感知”周围环境的能力。这类利用感知信息以改善机器人性能的研究开始于70年代初期,到1982年,美国通用汽车公司为其装配线上的机器人装配了视觉系统,宣告了感知机器人的诞生,在80年代得到了广泛应用。第三代机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业,称之为智能机器人。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。而感知本身,就是人类和动物所具有的低级智能。因此机器的智能分为两个层次:①具有感觉、识别、理解和判断功能; ②具有总结经验和学习的功能。所以,人们通常所说的第二代机器人可以看作是第一代智能机器人。 1.国内外机器人发展现状 在国外,工业机器人技术日趋成熟,已经成为一种标准设备被工业界广泛应用。从而,相继形成了一批具有影响力的、着名的工业机器人公司,它们包括:瑞典的ABB Robotics,日本的FANUC、Yaskawa,德国的KUKA Robo ter,美国的Adept Technology、American Robot、Emerson Industrial Automation、S-T Robotics,这些公司已经成为其所在地区的支柱性产业。国外专家预测,机器人产业是继汽车、计算机之后出现的一种焊装线上。但总的来看,我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,如:可行性低于国外产品;机器人应用工程起步较晚,应用领域窄,生产线系统技术与国外比有差距;在应用规模上,我国已安装的国产工业机器人约200台,约占全球已安装台数的万分之四。以上原因主要是没有形成机器人产业,当前我国的机器人生产都是应用户的要求,“一客户,一
1.3 简介能力风暴机器人仿真系统
1.3 简介能力风暴机器人仿真系统 学习智能机器人,除了需要具备机器人硬件外,还需要为机器人编写控制程序,并在场地上进行反复调试。但如果手边暂时既无机器人实物,又无真实场地,我们还能学习和研究机器人吗?答案是可以的。能力风暴机器人为我们提供了一套仿真的VJC系统软件,在这个仿真系统中,我们不仅可以为机器人编写各种控制程序,同时还可以将编制的程序下载到仿真的机器人上,并在仿真的场地中进行模拟运行和调试,体验机器人控制的全过程。本节我们就来认识VJC系统仿真版软件,学习构建仿真场地和仿真调试的方法。 1.3.1 认识VJC系统仿真版软件 1.VJC系统仿真版软件的安装 安装VJC系统仿真版的方法很简单,先打开本书配套光盘上的“VJC系统软件\VJC1.5仿真版”文件夹,找到名为“setup.exe”的安装程序,用鼠标双击该文件,系统自动将其安装到C盘中,并在Windows桌面上自动生成一个“VJC1.5仿真版”的快捷方式图标,软件安装的路径默认为:C:\program files\VJC1.5仿真版。如果我们使用的计算机中已经安装了VJC系统仿真版,则安装这一步可以跳过不做。 2.VJC系统仿真版软件的启动及主界面 当需要进入VJC系统仿真版编程时,只要双击桌面上的“VJC1.5仿真版”快捷方式图标,就可进入VJC的编程环境。 VJC编程环境的主界面见图1-3-1。可以看出,主界面包含了以下几个部分: (1)菜单栏及工具栏:位于窗口上方,工具栏上除了新建、打开、保存等常规按钮外,还有仿真、JC代码、缩放等按钮,见图1-3-2所示。 (2)模块库:位于窗口左侧,共有五大类模块库,其中:执行器模块库包含了基本动作模块,这是控制机器人运动的基本模
智能机器人实验报告
机器人实验报告 1、 实验目的: 1、 认识“能力风暴”机器人,并会简单编辑程序,使其完成规 定动作。 2、 了解“能力风暴机器人内部构造,认识声音、光敏、碰撞等 传感器。 3、 了解AS多功能拓展卡,并能够简单应用。 2、 实验过程: 各组领取能力风暴机器人,老师对其进行讲解,然后各组对其观察,认识,并编辑一些小程序对其进行简单操 作。 1、认识能力风暴机器人 AS-UII有一个功能很强的“大脑”和一组灵敏的“感觉”器官。它不仅可以随着外部环境敏捷地作出反应,而 且还可以与你进行交流。它有听觉、视觉、和触觉,它还 会象人一样使用动作和声音,来表达与它周围世界互动时 的感觉。 开关:控制AS-UII电源的按钮。 电源指示灯:电源指示灯的颜色是绿色。开机时,这个灯会发光,告诉你机器人已经进入工作状态了!
充电指示灯:当你给机器人充电时,充电指示的红灯发光。 充电口:只要将充电器的直流输出端插在充电口上,再将另一端接到 220V电源上即可。 下载口:使用时只需将串口通信线的一端接下载口,另一端连接在电脑机箱后面的一个九针串口上。 “复位/ASOS”按钮:这是个复合按钮,用于下载操作系统和复位。 复位功能:在机器人运行程序的过程中,按下此按钮,机器人就会中断程序的运行。如果要重新运行程序,须按运行键。 下载操作系统功能:连接好串口通信线,打开机器人电源开关,在VJC1.5流程图编辑界面中选择“工具(T)--更新操作系统”命令,然后按下此按钮,即可下载操作系统。 运行键:机器人开机后,按击“运行”键,就可以运行最近下载的程序。 通信指示灯:通信指示灯位于机器人主板的前方,是一个黄色的小灯。在给机器人下载程序时,这个黄灯闪烁,表明下载正常,程序正在进入机器人的“大脑”。