三相坐标系和相坐标系转换
交流电动机矢量控制变压变频调速系统(三)第三讲坐标
变换的原理和实现方法
收藏此信息打印该信息添加:李华德来源:未知
由第二讲的内容可知,在三相静止坐标系中,异步电动机数学模型是一个多输入、多输出、非线性、强耦合的控制对象,为了实现转矩和磁链之间的解耦控制,以提高调速系统的动静态性能,必须对异步电动机的数学模型进行坐标变换。
3.1 变换矩阵的确定原则
坐标变换的数学表达式可以用矩阵方程表示为
y=ax (3-1)
式(3-1)表示利用矩阵a将一组变量x变换为另一组变量y,其中系数矩阵a称为变换矩阵,例如,设x是交流电机三相轴系上的电流,经过矩阵a的变换得到y,可以认为y是另一轴系上的电流。这时,a称为电流变换矩阵,类似的还有电压变换矩阵、阻抗变换矩阵等,进行坐标变换的原则如下:
(1)确定电流变换矩时,应遵守变换前后所产生的旋转磁场等效的原则;
(2)为了矩阵运算的简单、方便,要求电流变换矩阵应为正交矩阵;
(3)确定电压变换矩阵和阻抗变换矩阵时,应遵守变换前后电机功率不变的原则,即变换前后功率不变。
假设电流坐标变换方程为:
i=ci′ (3-2)
式中,i′为新变量,i称为原变量,c为电流变换矩阵。
电压坐标变换方程为:
u′=bu (3-3)
式中,u′为新变量,u为原变量,b为电压变换矩阵。
根据功率不变原则,可以证明:
b=ct (3-4)
式中,ct为矩阵c的转置矩阵。
以上表明,当按照功率不变约束条件进行变换时,若已知电流变换矩阵就可以确定电压变换矩阵。
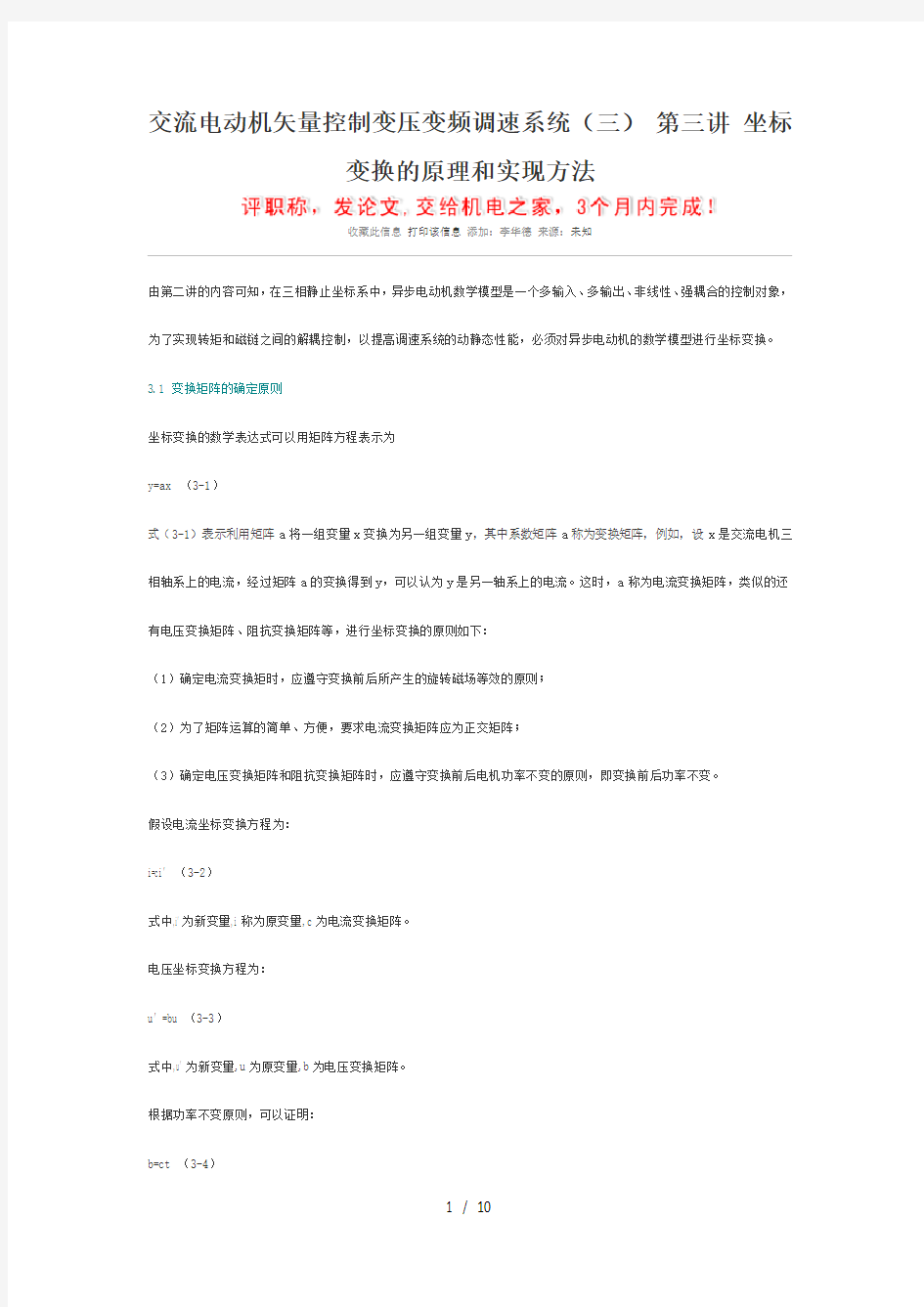
3.2 定子绕组轴系的变换(a-b-c<=>α-β)
所谓相变换就是三相轴系到二相轴系或二相轴系到三相轴系的变换,简称3/2变换或2/3变换。
三相轴系和二相轴系之间的关系如图3-1所示,为了方便起见,令三相的a轴与两相的α轴重合。假设磁势波形是按正弦分布,或只计其基波分量,当二者的旋转磁场完全等效时,合成磁势沿相同轴向的分量必定相等,即三相绕组和二相组绕的瞬时磁势沿α、β轴的投影应该相等,即:
(3-5)
式中,n3、n2分别为三相电机和两相电机每相定子绕组的有效匝数。
经计算并整理之后可得:
(3-6)
(3-7)
图3-1 三相定子绕组和二相定子绕组中磁势的空间矢量位置关系
用矩阵表示为:
(3-8)
如果规定三相电流为原电流i,两相电流为新电流i′,根据电流变换的定义式(3-2),式(3-8)具有i′=c-1i的形式,为了通过求逆得到c就要引进另一个独立于isα和isβ的新变量,记这个新变量为io,称之为零序电流,并定义为:
(3-9)
式中,k为待定系数。
补充io后,式(3-8)变为:
(3-10)
则:
(3-11)
将c-1求逆,得到:
(3-12)
其转置矩阵为:
(3-13)
根据确定变换矩阵的第三条原则即要求c-1=ct,可得和,从而有和,代入相应的变换矩阵式中,得到各变换矩阵如下:
二相—三相的变换矩阵:
(3-14)
三相—二相的变换矩阵:
(3-15)
对于三相y形不带零线的接线方式有,ia+ib+ic=0则,ic=-ia-ib,由式(3-8)可以得到:
(3-16)
而二相—三相的变换可以简化为:
(3-17)
图3-2表示按式(3-16)构成的三相—二相(3/2)变换器模型结构图。
图3-2 3/2变换模型结构图
3/2变换、2/3变换在系统中的符号表示如图3-3所示。
图3-3 3/2变换和2/3变换在系统中的符号表示
如前所述,根据变换前后功率不变的约束原则,电流变换矩阵也就是电压变换矩阵,还可以证明,它们也是磁链的变换矩阵。
3.3 转子绕组轴系变换()
图3-4(a)是一个对称的异步电动机三相转子绕组。图中ωsl为转差角频率。在转子对称多相绕相中,通入对称多相交流正弦电流时,生成合成的转子磁势fr,由电机学可知,转子磁势与定子磁势具有相同的转速、转向。
图3-4 转子三相轴系到两相轴系的变换
根据旋转磁场等效原则及功率不变约束条件,同定子绕组一样,可把转子三相轴系变换到两相轴系。具体做法是,把等效的两相电机的两相转子绕组d、q相序和三相电机的三相转子绕组a、b、c相序取为一致,且使d轴与a轴重合,如图3-4(b)所示。然后,直接使用定子三相轴系到两相轴系的变换矩阵(参见式3-15)。
3.4 旋转变换
在两相静止坐标系上的两相交流绕组α和β和在同步旋转坐标系上的两个直流绕组m和t之间的变换属于矢量旋转变换。它是一种静止的直角坐标系与旋转的直角坐标系之间的变换。这种变换同样遵守确定变换矩阵的三条原则。
转子d、q两相旋转轴系,根据确定变换矩阵的三条原则,也可以把它变换到静止的α-β轴系上,这种变换也属于矢量旋转坐标变换。
3.4.1 定子轴系的旋转变换
图3-5 旋转变换矢量关系图
在图3-5中,fs是异步电动机定子磁势,为空间矢量。通常以定子电流is代替它,这时定子电流被定义为空间矢量,记为is。图中m、t是任意同步旋转轴系,旋转角速度为同步角速度ωs。m轴与is之间的夹角用θs表示。由于两相绕组α和β在空间上的位置是固定的,因而m轴和α轴的夹角是随时间变化的,即,其中为任意的初始角。在矢量控制系统中,通常称为磁场定向角。
以m轴为基准,把is分解为与m轴重合和正交的两个分量ism和ist,分别称为定子电流的励磁分量和转矩分量。
由于磁场定向角是随时间变化的,因而is在α轴和β轴上的分量isα和isβ也是随时间变化的。由图3-5可以看出,isα、isβ和ism和ist之间存在着下列关系:
写成矩阵形式为:
(3-18)
简写:
式中,为同步旋转坐标系到静止坐标系的变换矩阵。
变换矩阵c是正交矩阵即ct=c-1,因此,由静止坐标系变换到同步旋转坐标系的矢量旋转变换方程式为:
简写:
式中,为静止坐标系到同步旋转坐标系的变换矩阵。
电压和磁链的旋转变换矩阵与电流的旋转变换矩阵相同。
根据式(3-18)和式(3-19)可以绘出矢量旋转变换器模型结构,如图3-6所示。
图3-6 矢量旋转变换器模型结构图
由图3-6可知,矢量旋转变换器由四个乘法器和两个加法器及一个反号器组成,在系统中用符号vr,vr-1表示,如图3-7所示。在德文中,矢量旋转变换器叫做矢量回转器用符号vd表示。
图3-7 矢量旋转变换器在系统中的符号表示
3.4.2 转子轴系的旋转变换
转子d-q轴系以角速度旋转,根据确定变换矩阵的三条原则,可以把它变换到静止不动的α-β轴系上,如图3-8所示。
图3-8 转子两相旋转轴系到静止轴系的变换
转子三相旋转绕组(a-b-c)经三相到二相变换得到转子两相旋转绕组(d-q)。假设两相静止绕组αr、βr除不旋转之外,与d、q绕组完全相同。根据磁场等效的原则,转子磁势fr沿α轴和β轴给出的分量等式,再除以每相有效匝数,可得:
写成矩阵形式
(3-20)
如果规定ird、irq为原电流,irα、irβ为新电流,则式中:
(3-21)
c-1的逆矩阵为:
若存在零序电流,由于零序电流不形成旋转磁场,只需在主对角线上增加数1,使矩阵增加一列一行即可
(3-22)
需要指出的是,由于转子磁势fr和定子磁势fs同步,可使αr、βr与αs、βs同轴。但是,实际上转子绕组与α、β轴系有相对运动,所以αr绕组和βr绕组只能看作是伪静止绕组。
需要明确的是,在进行这个变换的前后,转子电流的频率是不同的。变换之前,转子电流ird、irq的频率是转差频率,而变换之后,转子电流irα、irβ的频率是定子频率。可证明如下:
(3-23)
利用三角公式,并考虑到θr=ωrt则有:
(3-24)
从转子三相旋转轴系到两相静止轴系也可以直接进行变换。转子三相旋转轴系a-b-c到静止轴系α-β-ο的变换矩阵可由式(3-15)及式(3-21)相乘得到:
(3-25)
求c-1的逆,得到
(3-26)
c是一个正交矩阵,当电机为三相电机时,可直接使用式(3-25)给出的变换矩阵进行转子三相旋转轴系(a-b-c)到两相静止轴系(α-β)的变换,而不必从(a-b-c))到(d-q-o),再从(d-q-o)到(α-β-ο)那样分两步进行变换。
3.5 直角坐标—极坐标变换(k/p)
在矢量控制系统中常用直角坐标—极坐标的变换,直角坐标与极坐标之间的关系是:
(3-27)
(3-28)
式中,θs为m轴与定子电流矢量is之间的夹角。
由于θs取值不同时,的变化范围为0~∞,这个变化幅度太大,难以实施应用,因此常改用下列方式表示θs 值。
因为:,
所以:(3-29)
根据式(3-27)和式(3-29)构成的直角坐标一极坐标变换的模型结构图(德语称为矢量分析器vector analyzer-va)如图3-9所示。
图3-9 直角坐标—极坐标变换器模型结构图
由图可知,直角坐标一极坐标变换是由两个乘法器、两个求和器和一个除法器组成,符号表示如图3-10所示。
空间直角坐标系坐标转换方法
坐标转换方法 空间直角坐标系如果其原点不动,绕着某一个轴旋转而构成的新的坐标系,这个过程就叫做坐标旋转。在旧坐标系中的坐标与在旋转后新坐标系中的坐标有一定的转换关系,这种转换关系可以用转换矩阵来表示。 如图5.7,直角坐标系XYZ,P点的坐标为(x, y, z),其相应的在XY 平面,XZ平面,YZ平面分别为M(x, y,0),Q(x,0, z)和N(0, y, z)。 图5.7直角坐标系XYZ 设?表示第j 轴的旋转角度,R j (?) 表示绕第j 轴的旋转,其正方向是沿坐标轴向原点看去的逆时针方向。很明显当j 轴为旋转轴时,它对应的坐标中的j 分量是不变的。由于直角坐标系是对称的,下面我们以绕Z轴旋转为例推导其旋转变换矩阵,其它两个轴推导和它是一样的。 设图5.7的坐标绕Z轴逆时针旋转θ角度,新坐标为X 'Y'Z',如图5.8所示: 图5.8 坐标绕Z 轴逆时针旋转θ角度 由于坐标中的z 分量不变,我们可以简化地在XY 平面进行分分析,如图
5.9所示: 图5.9坐标绕Z 轴逆时针旋转θ 角度的XY 平面示意图 点 M X 和点M X ' 分别是M 点在X 轴和X '轴的投影。如图5.9 cos cos() sin sin() X X X X x OM OM MOM OM y MM OM MOM OM ?θ?θ==∠=-??==∠=-? (5-1) cos cos sin sin X X X X x OM OM MOM OM y MM OM MOM OM ? ?'''''==∠=??'==∠=? (5-2) 把(5-1)式按照三角函数展开得: cos cos sin sin sin cos cos sin x OM OM y OM OM ?θ?θ ?θ?θ=+??=+? (5-3) 把(5-2)式代入(5-3)式得: cos sin sin cos x x y y x y θθ θθ''=+??''=-+? (5-4) 坐标中的z 分量不变,即z = z'这样整个三维坐标变换就可以写成(用新坐标表 示旧坐标) cos sin sin cos x x y y x y z z θθ θθ''=+? ?''=-+??' =? (5-5) 把式(5-5)用一个坐标旋转变换矩阵R Z (θ) 表示可以写成:
84坐标系向其他的坐标系转化方法
Garmin手持机中WGS84坐标转换成BJ54坐标时要设置哪些参数?如何设置? 答:可以通过用户自定义的方式来实现。方法如下: 1.进入"主菜单页面"的"设置"子页面中,按动方向键选择“单位”按输入键进入坐标设置 的页面,将"位置格式"的选项改为" User UTM Grid "(自定义坐标格式)。 2.在出现的参数输入页面中输入相关的参数,包括中央经线,投影比例(该数值为1), 东西偏差(该数值为500000),南北偏差(该数值为0)。 3.按下屏幕上的"存储"按钮后,再将"地图基准"(有的机器称之为"坐标系统")的选项改 为"User"(自定义坐标系统)。 4.在出现的参数输入页面中输入相关参数,包括DX,DY,DZ,DA和DF。其中DA的数值 为-108,DF的数值为0.0000005。按下屏幕上的"存储"按钮后,机器显示的位置将用北京54坐标来表示了。如果是80坐标,则DA=-3,DF=0。 5.DX,DY,DZ三个参数因地区而异,具体如何求解可以让他们首先与本地测绘部门去咨 询,如果不给的话,可以通过如下方法来求解: 首先知道一个点的已知BJ54坐标(这个他们肯定都有,如果要做工作的话),然后用手持机测此点的坐标(WGS84坐标),通过坐标转换程序,即可求出DX,DY,DZ。需要注意的是,此程序中的y为6位数,也就是要将Bj54坐标中的前两位(带数)去掉。如果不知道BJ54坐标的高程,可以输入与WGS84坐标相同的即可。 通过上述设置后,即可将坐标系进行转换,此时手持机中显示的坐标上行为y,下行为x坐标。 中央子午线计算方法:例如,计算东经85°32'在3度带/6度带的代号N 经度L1与6度带带号N的关系为: L1=6N-3° 则N=Int((L1+3°)/6 + 0.5)=Int((85°32'+3°)/6 +0.5)=Int(15.26)=15 其中,Int()为取整函数 所以,东经85°32'在6度带上的带号为15,则带号为15的6度带的中央子午线为L1=6N-3=87° 经度L2与3度带带号n的关系为: L2=3n 则n=Int(L2/3+0.5)=Int(85°32'/3 +0.5)=Int(29.01)=29 所以,东经85°32'在3度带上的带号为29,则带号为29的3度带的中央子午线为L2=3n=87°
电子图纸坐标系的转换方法和步骤
电子图纸坐標系的轉換方法和步驟 测量坐标系在整个测量工作中是非常重要的。相对一些结构复杂,难度系数比较大的工程,在坐标及角度计算方面的工作量就相当之大,同时对于数据计算的准确度要求就更严格,为了减轻测量数据的计算量和提高数据计算的效率及准确度,确保工程的质量,特对电子图纸坐标系的转换方法和步骤简介如下。 1、确定电子图纸坐标系的夹角。如果所承建的工程不是座落在正南正北方向上的话,就要确定设计的现场轴线测量坐标系与电子图纸上的轴线坐标系所存在的夹角度数(如东莞玉兰大剧院工程所存在的夹角度数为75.4823°)。方法:就是用90°减去设计图纸上坐标方格轴线纵横方位角中小于90°的方位角即可。 2、旋转电子图纸的面。方法:在CAD的命令行里输入UCS—新建N—X轴—180°—回车。意思是说整个图纸以X轴为旋转轴顺时针旋转了一个180°的面。 3、旋转电子图纸的坐标系。方法:利用直线命令在操作面上画出“十”字标志,然后用旋转命令旋转第一步中所知道的夹角度数。 4、定义电子图纸的坐标系。方法:在CAD的命令行里输入UCS—新建N—三点—原点(用光标选中“十”字标志的交叉点)—X轴(用光标选中“十”字标志竖轴的正上方端点)—Y轴(用光标选中“十”字标志横轴的右手方端点)—回车。意思就是确定电子图纸轴线坐标系的X轴和Y轴的方向。 5、定义电子图纸的坐标原点。方法:由于电子图纸上的轴线坐标点在没有转换坐标系之前,该点的实际坐标值与图纸上所标注的坐标值是不一致的,所以首先要在电子图纸上找到有坐标值的点作为基点,然后用相对坐标法画直线,在直线命令中输入下一点时就要按“@-x,-y”的方法输入该基点的坐标值,最后在画完直线后就要定义原点了,
地方坐标系与CGCS2000坐标系转换方法的研究
地方坐标系与CGCS2000坐标系转换方法的研究 摘要:本文提出了地方坐标系和国家大地坐标系(CGCS2000)的几种转换方法,结合使用Mapinfo坐标转换软件,并进一步分析转换方法的转换结果,并提出相 应的结论。 关键词:地方坐标系;CGCS2000坐标系;转换方法;验证 引言 在新时期下,想要推动并发展数字地球、数字区域,必须要加强各类信息的 统一整合,加强信息共享度,这就需要结合GIS技术展开多源信息集成,空间坐 标系变换和统一则是实现多元数据统一管理、无缝集成的核心。GIS最为重要的 信息源就是地图(数字地图),在不同区域、不同时间段,其中的各类地图坐标 系也存在着些许差异。我国地图坐标系发展中,在上世纪90年代,我国基本比 例尺地形图主要采用了北京54坐标系、1980西安坐标系两种。而地方为了能够 满足当地城市建设发展需求,通常会构建独立的坐标系(地方坐标系),部分地 区甚至构建了两个及以上的独立坐标系。而如何进行地方坐标系与CGCS2000坐 标系相互转换是需要注意的问题。下文通过CGCS2000坐标系、地方坐标系建立 原理,分析二者的转换关系,并提出多种有效的转换方法。 1.地方坐标系与CGCS2000坐标系之间的关系 我国地形图比例尺中,小比例尺采用了6°分带、大中比例尺采用了3°分带, 均采用了高斯-克吕格投影。构建国家坐标系是以高斯-克吕格投影分带为基础, 并且每个分带都构建了直角坐标系,也就是高斯直角坐标系。结合投影变换规律,投影变形越大证明离中央经线的距离越远。绝大部分地区都难以精准的位于投影 中央带,这就需要结合CGCS2000坐标系进行转换。以黑龙江省大庆市为例,大 庆市辖5区4县,市区所处位置是E124°19'至E125°12',位于6°分带中的21带,中央经线为E123°;在3°投影带上,主要为42带,中央经线为E126°,其中杜尔 伯特蒙古族自治县还属于41带和42带两个投影带,中央经线为E123°、E126°。 由此可见,大庆市无法精确的在地图上表达空间信息,所以如果不进行坐标转换,则无法满足大比例尺测图要求,工程建设也无法满足工程要求。因此很多城市都 建立了独立的坐标系,在大比例尺地形当中单独使用。 地方坐标系构建,需要结合某地区国家控制点作为原点,通过原点的经线作 为中央经线。通常情况下,是在区域中部、西南角选择原点。地方坐标系与CGCS2000坐标系的关系见图1. 图1 地方坐标系与CGCS2000坐标系关系 2.地方坐标系和CGCS2000坐标系转换方法 对于当今绝大部分城市来说,城市大比例尺地图都是表示地方坐标系,不表 示CGCS2000坐标系(也不表示经纬度)。此类地图数据缺乏通用性,适用范围 局限,也是实现数据融合、发展数字地球的一大阻碍。因此,本文通过对地方坐 标系、CGCS2000坐标系建立原理、二者相互关系的研究,提出了几种坐标系转 换方法,主要有: 2.1直接变换法 如图1所示,地方坐标系与CGCS2000坐标系之间存在着平移、旋转关系,
地方坐标系与国家坐标系转换方法探讨
地方坐标系与国家坐标系转换方法探讨 摘要:提出地方坐标系与国家坐标系的两种转换方法,开发基于MapInfo的坐标转换软件,用实例验证和分析两种转换的结果。 在GIS 环境下进行多源信息的集成,将各种数据整合成统一规范的信息,从而实现数据的共享是数字地球、数字区域的必由之路,空间坐标系的变换与统一则是实现多源数据的统一管理、无缝集成的关键。地图是GIS 主要的信息源之一,而不同的时期、不同的区域、不同的用途使得各种地图的坐标系存在很大的差异。就我国的地图坐标体系而言,20世纪90 年代前后,国家基本比例尺地形图分别采用北京坐标系和西安坐标系。地方上为了适应各类城市建设的需要,往往建立自己的独立或相对独立的坐标系,称为地方坐标系。有些地区甚至存在两个以上的独立坐标系。 本文根据国家坐标系及地方坐标系建立的原理,从理论上对其转换关系进行分析,提出两种可操作的转换方法及其实现方案。 一、地方坐标系与国家坐标系的关系 我国大、中比例尺地形图均采用6°分带或3°分带的高斯―克吕格投影,国家坐标系的建立是以高斯―克吕格投影分带为基础的,各带分别建立直角坐标系,简你高斯直角坐标系。根据高斯―克吕格投影的变形规律,离开中央经线越远,所产生的投影变形就越大。而大多数地区或城市都不可能正好位于投影带中央。例如,上海市所处的位置大约是E120°50′~E122°00′,在6°分带中位于第21 带,其中央经线为E123°,区域的最大长度变形可达0.000 52 ;对于3°投影带,上海又同时属于第40,41这两个投影带,中央经线分别是E120°和E123°。如此对于上海这样的城市来说,就不能精确地在地图上表达其空间信息,因而不能满足大比例尺测图或工程建设的需要。因此,一些大中城市都建立了自己的独立坐标系,并在大比例尺地形图中单独使用。 地方坐标系的建立,通常是根据需要以本区某国家控制点为原点(地方坐标系的起算点),过原点的经线为中央经线。原点通常选择在区城的中部或者西南角。地方坐标系与国家坐标系关系如图1a(略)所示 二、地方坐标与国家坐标变换方法 目前我国许多城市的大比例尺地图通常只表示其地方坐标系,一般并不表示国家坐标,也不表示经纬度。这类地图数据的通用性一般比较差,成为多源数据融合的一个障碍。笔者根据国家与地方坐标系建立的原理及其相互关系,提出地方坐标转换为国家坐标乃至地球坐标的两种方法:直接变换法和间接变换法。 1.直接变换法 如图1a 所示,地方坐标系与国家坐标系之间存在一种旋转与平移的关系。因此,进行两坐标系转换的最直接办法是求算地方坐标系相对于国家坐标系的旋转角度和平移量。 (1)、计算地方系对国家系的旋转角 在高斯―克吕格投影中,除中央经线投影为直线外,其余经线均对称并收敛于中央经线。根据国家坐标系和地方坐标系的建立原则,国家与地方两坐标系的夹角即为子午线收敛角。已知某地方原点的经纬度,利用子午线收敛角公式可计算地方坐标系相对于国家坐标系的旋转角度α。
转坐标系详细步骤
转坐标系详细步骤
————————————————————————————————作者:————————————————————————————————日期: ?
“北京54坐标系”转“西安80坐标系”一、数据说明 北京54坐标系和西安80坐标系之间的转换其实是两种不同的椭球参数之间的转换,一般而言比较严密的是用七参数布尔莎模型,即X平移,Y平移,Z平移,X旋转(WX),Y旋转(WY),Z旋转(WY),尺度变化(DM)。若得七参数就需要在一个地区提供3个以上的公共点坐标对(即北京54坐标下x、y、z和西安80坐标系下x、y、z),可以向地方测绘局获取。 下面讲述利用已知的3个以上(本例采用4个点计算)的公共点计算七参数方法转换: 二、利用4个已知公共点计算转换七参数 1、数据准备 (1)将已知54、80坐标系直角坐标拷贝到文本文档,其排列格式如下(图1、图2):不加带号。 图1 54直角坐标 图2 80直角坐标 (2)将已知54、80坐标系直角坐标利用MAPGIS“投影变换”转换为经纬度坐标,且坐标单位为“秒”,这样计算出的参数用来转换为80坐标系时更精确。具体操作步骤如下: 1)启动MAPGIS下“投影变换模块”,点击“投影变换”下“用户文件投影转换”弹出“用户数据点文件投影转换”对话框,如图3; 2)点击“打开文件”,选择已准备的“54直角坐标.txt”文本文档,打开后选择“按指定分隔符”后弹出的对话框点击确定激活“设置分隔符”选项,点击“设置分隔符”,其设置方式为:①“Tal键”、“空格”两个选
图3 图4
项前画勾,②修改“属性名称所在行”,点击其下拉箭头选择“无”字下面一组数据,③将“属性名称”修改为x、y,④“数据类型”修改为“5双精度”,⑤“小数位”修改为“5”或其他均可,但最好至少为“2”,其设置与最终转换出坐标的小数位数相关。设置完成后点击“确定”。如图4。 3)设置“用户投影参数”及“结果投影参数”其设置方式如图5、图6。注意:投影中心点经度一定要输入,如经度为105°,其格式为1050000,“用户投影参数”为“投影平面直角坐标”;“结果投影参数”为“地理坐标系”,且“比例尺分母”为“1”,“坐标单位”为“妙”,“投影中心点经度”要输入。二者“椭球参数”均为“54坐标系”。 图5用户投影参数 图6 结果投影参数 4)以上参数设置完成后点击“投影变换”——“写到文件”,弹出对话框如图7 ,先新建“54经纬度坐标.txt”,选中后点击保存,选择替换。 5)按照上述1)—4)步骤将已知的80直角坐标转换为以“秒”为单位的经纬度坐标。注意:在“用户投影参数”及“结果投影参数”设置时,二者“椭球参数”均为“80坐标系”,其他参数同上。 转换后的54和80坐标系以“秒”为单位的经纬度坐标如下:图7、图8。坐标中小数点前为“6位数”的是“经度”,小数点前为“5位数”的是“纬度”。 图7 54经纬度坐标图8 80经纬度坐标
坐标转换方法
在工作过程中许多朋友会遇到坐标转换的问题,下面笔者就经常使用的一个坐标转换软件的使用方法做一个稍微详细的说明。 1、坐标系的确定 图1 软件使用界面 图1为软件使用界面,目前我们在工作过程中碰到的XY坐标系大多为全国80(也称西安1980)坐标系,也会有少量的设计会使用北京54坐标系。 图2和图3为同一点转换成全国80和北京54后差别,从两个转换结果来看,两个坐标系相差较小,可能比系统误差还小。(坐标转换过程中会产生系统误差,在不同位置误差也会有差异,所以转换出来的坐标只能是大概位置的参考。有兴趣的可以去研究下大地坐标系和投影坐标系,研究明白了就知道了为啥会有一定程度的误差,而且偏离中心线越远,误差越大)
图2(北京54) 图3(全国80) 2、中央子午线的确定 中央子午线一般为三度带和六度带的中央子午线坐标(至于什么是三度带和六度带,有兴趣的可以自行去研究投影坐标系的由来)。三度带的中央子午线经度为3的整数倍,六度带的中央子午线经度为6的整数倍,以图3中坐标为例,经度为112°30′至115°30′以内的坐标均为以114°为中
央子午线经度的三度带分区内;经度为111°至117°以内的坐标均为以114°为中央子午线经度的六度带分区内。 无法确定所在区域的中央子午线经度,可将区域的经度转换成小数后除3或者6,四舍五入后再乘3或者6即为中央子午线经度,如图中114°30′,转换后为114.5°,除3,四舍五入后再乘3即为114°。 3、经纬度转XY坐标 图4 图4为经纬度转XY坐标方法示意,在确定区域的中央子午线经度后,在BL处填上相应的纬度和经度,点击转换即可转出所需坐标。 4、完整的XY坐标转经纬度 目前国内部分设计单位在设计时,出于某些目的,会省略XY坐标中的某些位数,因此在此处分完整的XY坐标转经纬度和不完整的XY坐标转经纬度。
手持GPS坐标系转换方法
手持GPS坐标系转换方法 杜大彬,张宽房,张开盾,李明贵 (陕西省地质调查院,西安710058) 摘要:导航型手持GPS目前在中小比例地质调查等领域得到广泛应用,由于坐 标系之I'.-1存在差异,在实际应用过程中,必须将手持机的WGS84坐标系转换为我 国应用的BJ54或西安8O坐标系。坐标转换的准确与否,直接影响到工程测量定位 的精度,传统的坐标转换计算所需要的起算资料不易收集,计算过程过于繁琐,非 专业人员难以掌握。本文根据收集的三角点BJ54坐标(或西安8O坐标),和现场 测定的过渡坐标,求出各参数在本工作地区的变化率,建立参数方程,反向求出适 合于当地的各项改正参数,方法简便易行,为手持GPS定位的坐标转换方法提出 一种新的思路。 关键词:坐标转换;WGS84坐标系;BJ54坐标系;过渡坐标;变化率 中图分类号:P228.4 文献标识码:B 随着技术的不断完善,导航型GPS的定位精度及功能较之以前有很大提高。它以其全 天候工作、携带方便、数据记录及回放快捷等功能,倍受使用者青睐。经过参数校正后的GPS,其平面精度完全可以取代地形图定点,因而在中小比例尺地质矿产调查数字填图、地球物理、地球化学勘探野外作业的点位测量中有着广泛的应用前景。 坐标系转换问题提出 由于GPS卫星星历是以WGS84坐标系(经纬度坐标)为依据而建立的,我国目前应 用的地形图一般采用1954年北京坐标(以下简称BJ54坐标)系或西安8O大地坐标系,不 同的坐标系之间存在平移和旋转关系,在不同地区,同一点位的WGS84坐标值与我国应用的坐标系的坐标值,有约6O~150 In的差值。在实际应用中,不同的坐标系必须进行坐标转换。由于手持机测量通常是短时间近似测量,采用单次测量或多次测量值取平均值,一般不作差分处理,从某种意义上讲,手持机的相对定位精度受其接收信号强度影响,坐标转换参数的准确与否,直接影响其绝对定位精度。 坐标转换的关键是求出不同坐标系之间的坐标转换参数,在实际工作过程中,坐标系统 收稿日期:2OO7一O5一O8 作者简介:杜大彬,男,37岁,工程测绘工程师,主要从事物化探及地质测量工作。 维普资讯https://www.360docs.net/doc/7e1876190.html, 第1期杜大彬等:手持GPS坐标系转换方法 的转换通常采用方法是在应用区域内GPS“B”级网内,收集三个以上网点的WGS84坐标 系B、L、H值及我国坐标系(BJ54或西安80)B、L、h、x(高程异常),按其参考球体的 投影方式,计算各参数的差值。由于各地GPS建网及重力研究工作程度不同,通常在某些地区,常用参数尤其是高程异常,一般不易收集,并且其计算过程较为繁琐。 为了寻求一种快捷、方便、精度满足工作要求的GPS坐标转换方法,作者经反复试验, 总结出坐标转换的一些规律。以台湾GARMIN仪器公司的ETREX VISTA (展望)机型使 用为例,这里给出一种只用一个三角点,推算其BJ54(西安80)坐标改正参数的方法。 2 参数变化在坐标系转换的规律 作者曾在陕南某地从事物探电法工作时,特意在一已知三角点作GPS参数变化试验, 、该三角点的BJ54坐标值为:X—XXX0433.217;Y—XXX67605.110,三角点位于汉江南岸,视野开阔,有利于GPS观测。在观测时设置当地中央经线、DA、DF等参数,DX、 DY、DZ均为0,在星况稳定且仪器显示估计误差为5 m 时,在已知点上读取若干组数据,取得其平均值为x—XXX0445;Y—XXX644。此值作为WGS84与BJ54坐标系之间转换的 过渡坐标。
北京54坐标与西安80坐标相互转换的两种方法
北京54坐标与西安80坐标相互转换的两种方法 一、北京54坐标系、西安80坐标系及其相互关系 1954年北京坐标系是我国五十年代由原苏联1942年普尔科沃坐标系传算而 来采用克拉索夫斯基椭球体其参数为长半轴为 6378245米扁率为 1 。这个坐标系的建立在我国国民经济和社会发展中发挥了巨大的作用但 该坐标系存在着定位后的参考椭球面与我国大地水准面不能达到最佳拟合在中 国东部地区大地水准面差距自西向东增加最大达+68米其椭球的长半轴与现代 测定的精确值相比109米的缺陷定向不明确椭球短轴未指向国际协议原点 CIO也不是中国地极原点起始大地子午面也不是国际时间局BIH 所定义的格林尼治平均天文台子午面。同时,该系统提供的大地点坐标是通过局 部平差逐级控制求得的由于施测年代不同、承担单位不同不同锁段算出的成 果相矛盾给用户使用带来困难。 1978年4月,中国在西安召开了全国天文大地网平差会议,在会议上决定建 立中国新的国家大地坐标系有关部门根据会议纪要,开展并进行了多方面的工 作,建成了1980西安国家大地坐标系(GDZ80)该坐标系全面描述了椭球的4个 基本参数,同时反映了椭球的几何特性和物理特性这4个参数的数值采用的是 1975年国际大地测量与地球物理联合会第16届大会的推荐值(简称IGA-1975椭 球 ) 。其主要参数为长半轴为6378140 米扁率为 1/。IAG-1975 椭球参数精度较高能更好地代表和描述地球的几何形状和物理特征。在其椭体 定位方面以我国范围内高程异常平方和最小为原则做到了与我国大地水准面 较好的吻合。 此外,1982年我国已完成了全国天文大地网的整体平差,消除了以前局部平 差和逐级控制产生的不合理影响提高了大地网的精度在上述基础上建立的 1980西安坐标系比1954年北京坐标系更科学、更严密、更能满足科研和经济建 设的需要。 由于北京54坐标系和西安80坐标系是两种不同的大地基准面这两个椭球 参数不同参心所在位置不同指向不同在高斯平面上其纵横坐标轴不重合 因而同一点的坐标是不同的无论是三度带六度带还是经纬度坐标都是不同的其平面位置最大相差80米。 二、转换原理 北京54坐标与西安坐标之间的转换其实是一种椭球参数的转换作为这种 转换在同一个椭球里的转换都是严密的而在不同的椭球之间的转换是不严密 的因此不存在一套转换参数可以全国通用也没有现成的公式来完成转换因此 必须利用具有两套坐标值的公共点实现转换。 以下作者结合工作实际分别给出利用南方测绘公司的地形地籍软件 CASS2008和工具软件把1954年北京坐标转换为1980西安坐标的方法。 三、转换方法 ㈠、利用南方CASS2008进行坐标转换 1、输入公共点坐标数据 首先准备好2至3个公共点即同时拥有54和80两套坐标这些点要覆盖 要转换数据所在在地区。然后打开CASS2008选择“地物编辑”菜单下的“坐 标转换”进入坐标转换界面,在“公共点”下面“转换前”后面的三个输入框中
坐标系转换坐标系详细教程
MAPGIS“北京54 坐标系”转“西安80坐标系”详细教程 北京54坐标系和西安80坐标系其实是一种椭球参数的转换,作为这种转换在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换是不严密,因此不存在一套转换参数可以全国通用的,在每个地方会不一样,因为他们是两个不同的椭球基准。那么,两个椭球间的坐标转换,一般而言比较严密的是用七参数布尔莎模型,即X平移,Y平移,Z平移,X旋转(WX),Y旋转(WY),Z旋转(WY),尺度变化(DM)。若求得七参数就需要在一个地区提供3个以上的公共点坐标对(即北京54坐标下x、y、z和西安80坐标系下x、y、z),如果区域范围不大,最远点间的距离不大于30km(经验值),这可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化面DM视为0。 方法: 第一步:向地方测绘局(或其他地方)找本区域三个公共点坐标对(即北京54坐标下x、y、z和西安80坐标系下x、y、z); 第二步:讲三个点的坐标对全部转换以弧度为单位。(菜单:投影转换——输入单点投影转换,计算出这三个点的弧度值并记录下来); 第三步:求公共点操作系数(菜单:投影转换——坐标系转换)。如果求出转换系数后,记录下来; 第四步:编辑坐标转换系数(菜单:投影转换——编辑坐标转换系数),最后进行投影变换,“当前投影”输入80坐标系参数,“目的投影”输入54坐标系参数。进行转换时系统会自动调用曾编辑过的坐标转换系数。 详细步骤如下: 首先将MAPGIS平台的工作路径设置为“…..\北京54转西安80”文件夹下。 下面我们来讲解“北京54 坐标系”转“西安80坐标系”的转换方法和步骤。 一、数据说明 北京54 坐标系和西安80 坐标系之间的转换其实是两种不同的椭球参数之间的转换,一般而言比较严密的是用七参数布尔莎模型,即X 平移,Y 平移,Z 平移,X 旋转(WX),Y 旋转(WY),Z 旋转(WY),尺度变化(DM)。若得七参数就需要在一个地区提供3 个以上的公共点坐标对(即北京54 坐标下x、y、z 和西安80 坐标系下x、y、z),可以向地方测绘局获取。 二、“北京54 坐标系”转“西安80 坐标系”的操作步骤 启动“投影变换模块”,单击“文件”菜单下“打开文件”命令,将演示数据“演示数据_北京54.WT”、“演示数据_北京54.WL”、“演示数据_北京54.WP”打开,如图1 所示:
手持GPS坐标系转换方法
手持GPS坐标系转换方法 陕西省地质调查院杜大彬陈书让张宽房张开盾李明贵 (西安市大兴东路12号710016) 摘要 导航型手持GPS目前在中小比例地质调查等领域得到广泛应用,由于坐标系之间存在差异,在实际应用过程中,必须将手持机的WGS84坐标系转换为我国应用的BJ54或西安80坐标系。坐标转换的准确与否,直接影响到工程测量定位的精度,传统的坐标转换计算所需要的起算资料不易收集,计算过程过于繁琐,非专业人员难以掌握。本文根据收集的三角点BJ54坐标(或西安80坐标),和现场测定的过渡坐标,求出各参数在本工作地区的变化率,建立参数方程,反向求出适合于当地的各项改正参数,方法简便易行,为手持GPS 测定坐标转换方法提出一种新的思路。 关键词:坐标转换 WGS84坐标系 BJ54坐标系过渡坐标变化率 随着技术的不断完善,导航型GPS的定位精度及功能较之以前有很大提高。它以其全天候工作、携带方便、数据记录及回放快捷等功能,倍受使用者青睐。经过参数校正后的GPS,其平面精度完全可以取代地形图定点,因而在中小比例尺地质矿产调查数字填图、地球物理、地球化学勘探野外作业的点位测量中有着广泛的应用前景。 1.坐标系转换问题提出 由于GPS卫星星历是以WGS84坐标系(经纬度坐标)为依据而建立的,我国目前应用的地形图一般采用1954年北京坐标(以下简称BJ54坐标)系或西安80大地坐标系,不同的坐标系之间存在平移和旋转关系,在不同地区,同一点位的WGS84坐标值与我国应用的坐标系的坐标值,有约60—150米的差值。在实际应用中,不同的坐标系必须进行坐标转换。由于手持机测量通常是短时间近似测量,采用单次测量或多次测量值取平均值,一般不作差分处理,从某种意义上讲,手持机的相对定位精度受其接收信号强度影响,坐标转换参数的准确与否,直接影响其绝对定位精度。 坐标转换的关键是求出不同坐标系之间的坐标转换参数,在实际工作过程中,坐标系统的转换通常采用方法是在应用区域内GPS“B”级网内,收集三个以上网点的WGS84坐标系B、L、H值及我国坐标系(BJ54或西安80)B、L、h、x(高程异常),按其参考球体的投影方式,计算各参数的差值。由于各地GPS建网及重力研究工作程度不同,通常在某些地区,常用参数尤其是高程异常,一般不易收集,并且其计算过程较为繁琐。 为了寻求一种快捷、方便、精度满足工作要求的GPS坐标转换方法,笔者经反复试验,总结出坐标转换的一些规律。以台湾GARMIN仪器公司的ETREX VISTA(展望)机型使用为例,这里给出一种只用一个三角点,推算其BJ54(西安80)坐标改正参数的方法。
探讨不同坐标系的坐标转换方法
探讨不同坐标系的坐标转换方法 摘要:本文主要讲述了应用Cass成图软件,用图解的方法进行转换参数的计算及图形、包括控制点在内的数据转换,并举例进行了说明。 关键词地籍调查坐标系转换 目前,城镇地籍调查成果还是把点的平面坐标与高程分开处理,两种坐标系下的成果转换也是把平面坐标与高程分别转换。 本文就城镇地籍调查中不同坐标系的成果,尤其是控制点成果,如何转换进行探讨。 1.不同坐标系下坐标转换的理论基础 不同坐标系的坐标转换与换带计算是有区别的。换带计算是在同一个参考椭球基础上进行坐标变换,本文所指的不同坐标系的坐标转换是在不同的参考椭球基础上的坐标转换。 1980年国家大地坐标系与1954年北京坐标系。在参考椭球的大小、定位及起始方向的确定等方面均存在差异。因此两种坐标系下的测量成果转换,不但需要进行平移、旋转,通常还需要进行尺度的缩放。 平面坐标是采用高斯——克吕格投影的高斯平面直角坐标。坐标转换参数有四个。其中二个坐标平移参数△x、△y,一个旋转参数△a,一个尺度参数k。要求得这四个转换参数,至少需要两个同时具有两套坐标系统坐标的控制点(公共点),按式(1)计算转换参数。如果公共点超过二个,则由(1)式按最小二乘原理计算。 X =x +△+ k(x- x )•cos△a-k(y-y )•sin△a y = y +△,+k(y-y ) •cos△a+k(x- x )•sin△a(1) 式中X、Y为新坐标系下的坐标,x,y是旧坐标系下的坐标,x ,yo是计算坐标原点(旧坐标系)。 一般的成图软件都具有计算坐标转换参数的功能。但有的成图软件显示的转换参数取位不够,如Cass成图软件,其坐标平移参数和尺度参数仅显示3位小数,旋转参数取位到0.1‖。这对于一般的图形转换来说,其精度可以满足。但对于控制点的转换而言,其精度就显然不够。如果要转换四等控制点,则尺度参数要达到6位小数,旋转参数取位到0.0l‖。也有的文献给出的坐标转换计算公
2000国家大地坐标系及其转换方法探讨
2000国家大地坐标系及其转换方法探讨 摘要:随着2000国家大地坐标的广泛应用,越来越多的工程都在采用2000国家大地坐标。分析研究地质成果2000国家大地坐标系转换技术方法与流程,实现地质调查成果、专题空间数据库坐标系向2000国家大地坐标系的转换,能为地质数据坐标系转换提供技术支撑。基于此,本文对2000国家大地坐标系进行了简要说明,并介绍了几种从传统大地坐标系向2000国家大地坐标系进行转换的方法,供大家参考和借鉴,不足之处敬请指正。 关键词:2000国家大地坐标系;坐标转换;ITRF框架 引言 2008年国家测绘地理信息局发布第2号公告“根据《中华人民共和国测绘法》,经国务院批准,我国自2008年7月1日起,启用2000国家大地坐标系”(2000国家大地坐标系英文名为:China Geodetic Coordinate System 2000缩写为CGCS2000)。2013年中国地质调查局下发了“中国地质调查局关于转发《2000国家大地坐标系推广使用技术指南》和《大地测量控制点坐标转换技术规程》的通知(中地调函〔2013〕332号)”,要求各地质调查项目承担单位学习相关文件,完成原坐标系成果向2000国家大地坐标系的转换工作。然而,经过十多年的积累,地质调查成果数量庞大。即使只考虑全国地质资料馆的馆藏基础地调成果,也有百万级的数量。对如此巨量的数据进行坐标转换,其工作量、工作成本以及投入的人力和其他资源必然将是一个庞大的数字。 1 2000国家大地坐标系的定义及实现 大地坐标系是建立地球空间框架的基础,是描述地球空间实体位置的参考基准,因此科学地定义和使用大地坐标系将会对航空航天、卫星定位、地壳形变、板块运动、工程建设等许多领域产生重大影响。2000国家大地坐标系(CGCS 2000)是依照国际地球参照系来进行定义的,完全符合ITRS基本的定义条件,具体如下: (1)CGCS 2000是整个地球质量的中心,即地心,包括了海洋以及大气层的整体质量。2000国家大地坐标系的Z轴由原点指向历元2000.0的地球参考极的方向,该历元的指向由国际时间局给定的历元为1984.0作为初始指向来推算,定向的时间演化保证相对于地壳不产生残余的全球旋转;X轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点;Y轴与Z轴、X轴构成右手正交坐标系。 (2)它是以米为单位对长度进行定义的。该尺度单位是在相对论的基础上,通过建立模型所得,并且与地心部分的时间坐标相同。 (3)1984.0国际时间局已经确立了国家大地坐标系的定向初始。2000国家大地坐标系由2000国家GPS网在历元2000.0的三维坐标和速度实现的,2000国家GPS大地网是经过联合平差得到的一个覆盖全国规模的GPS大地网,联合平差是以全球分布的IGS核心站的ITRF97框架下的坐标和速度为起算成果,并将成果归算到参考历元2000.0。 (4)地球整体结构的运转,在不考虑地球旋转的情况下,保证着定向的时间演变。 2000国家大地坐标系是以地心作为原点,以国际地球参照系的参考极的方向作为Z轴的方向,由国际地球参照系的I RM和赤道面的交线所形成的线就是2000国家大地坐标的X轴,X、Y、Z三轴共同组成了右手地固正交坐标系。2000
国家坐标系与地方独立坐标系坐标转换方法与计算
分类号: P221 2014年毕业论文 题目:国家坐标系与地方独立坐标系坐标 转换方法与计算 作者姓名:丁可 学号: 2012109105 系(院)、专业:地球科学与工程学院、测绘工程 指导教师姓名:徐长海 指导教师职称:助教 2014 年 5 月 4 日
CLC:P221 The 2013 session of the undergraduate thesis Title: National coordinate system transformation method and local independent coordinate system and calculated For name:Ding Ke Student ID:2012109105 Department:School of Earth Science and Mapping Engineering Name of instructor:Xu Chang Hai Instructor titles:Teaching Assistant May 5, 20
国家坐标系与地方独立坐标系坐标转换方法与计算 丁可 (地球科学与工程学院12测绘工程专升本234000) 摘要 随着我国经济的发展的突飞猛进,对测量精度要求的建设也越来越高,就是以便满足实际运行要求。但在一些城市或大型工程建设中可能刚好在两个投影带的交界处,布设控制网时如果按照标准的3度或者1.5度带投影,投影变形会非常大,给施工作业带来不便,此时需要建立地方独立坐标系。认识国家坐标系的转换和地方独立坐标系统有一定的现实意义,如何实现两者的换算,一直是关注的工程建设中的热点问题。因此,完成工程测量领域国家坐标定位成果与地方独立坐标成果的转换问题,以适应城市化和实际工程的需要。 关键词:国家坐标;独立坐标;坐标转换
国家坐标系与地方独立坐标系坐标转换方法与计算
国家坐标系与地方独立坐标系坐标转换方法与计算 作者姓名:岳雪荣 学号: 001 系(院)、专业:建筑工程学院、测绘工程14-1 2016 年 6 月 6 日
国家坐标系与地方独立坐标系坐标转换方法与计算 (建筑工程学院 14测绘工程专业) 摘要 随着我国经济的发展的突飞猛进,对测量精度要求的建设也越来越高,就是以便满足实际运行要求。但在一些城市或大型工程建设中可能刚好在两个投影带的交界处,布设控制网时如果按照标准的3度或者度带投影,投影变形会非常大,给施工作业带来不便,此时需要建立地方独立坐标系。认识国家坐标系的转换和地方独立坐标系统有一定的现实意义,如何实现两者的换算,一直是关注的工程建设中的热点问题。因此,完成工程测量领域国家坐标定位成果与地方独立坐标成果的转换问题,以适应城市化和实际工程的需要。 关键词:国家坐标;独立坐标;坐标转换
目录 1绪论 背景和意义 主要内容 解决思路和方法 2 建立独立坐标系的方法3常用坐标系统的方法介绍
1 绪论 背景和意义 随着社会的经济快速发展,尤其是近十多年来空间测量技术突飞猛进,得到了长足的发展,其精度也大幅提高。从测量的发展史来看,从简单到复杂,从人工操作到测量自动化、一体化,从常规精度测量到高精度测量,促使大地坐标系有参心坐标系到大地坐标系的转化和应用。大地测量工作已有传统的二维平面坐标向三位立体空间坐标转化,逐步形成四维空间坐标系统。 在测绘中,地方独立坐标系和国家坐标系为平面坐标系的两种坐标系统。对于工程测量和城市建设过程,建设区域不可能都有合适的投影子午线,势必可能有所差异,这样一来作业区域的高程和坐标或者是工程关键区域的高程和坐标能够与国家大地基准的参考椭球有较大的出入,在这种情况下,根据不同的投影区国家坐标系统,可能就会出现投影变形导致严重错误。建立地方独立坐标系统来降低高程归化影响和是归化投影变形,误差控制在一个小范围的数据计算和实际大致相符,不需要任何修改,从而可以满足工程建设和实际应用。 就当前而言,测量工作重要的触及应用三种常用的大地坐标系统,即为地方独立坐标系,地心坐标系,参心坐标系 [1]。地心坐标系:以为根据建立的,包括CGCS2000国家大地坐标系,GPS平差后的WGS-84坐标系等。参心坐标系:参心坐标系是以参考椭球为基准的,包括54北京坐标系和80西安坐标系等。独立坐标系:以自己情况而定的独立坐标,采用新椭球,投影到高斯平面上,计算参数,在结合相关数据解算得到,如城市建设坐标系。它们统称为地固坐标系统。有机结合在一起对于整个坐标系统来说具有很大的应用价值,解决了实际生活中各种的工程测量问题,如土地申报工程,矿产调查工程,全国土地调查工程等等。根据现在的经济建设情况,我们应该结合实际,展开建立国家大地坐标与地方独立坐标的研究工作是非常必要的。这一点也是目前需要解决的问题。 为了更方面的需求和发展,也使得更好地创建国家坐标系与地方独立坐标系的关系。在这里引入了”GPS坐标”这个概念。在这里我们用以工程测量,成为大型工程建设控制网和城建控制网的主要手段。基以GPS坐标系建立的精度高的独立坐标系,将方便于GPS较高精确的、高效的获取城建坐标和高程需求,有利于GPS与GIS的有机结合,进一步提升城市的综合能力,加速城市的现代化建设,对工程建设具有巨大的辅助作用[2]。根据GPS坐标系建立的地方独立坐标系是未来的希望。 主要内容
电子图纸坐标系转换方法
本站搜索更多关于“知道图纸上两点坐标,用天正如何知道其他的坐标”的内容 测量坐标系在整个测量工作中是非常重要的。相对一些结构复杂,难度系数比较大的工程,在坐标及角度计算方面的工作量就相当之大,同时对于数据计算的准确度要求就更严格,为了减轻测量数据的计算量和提高数据计算的效率及准确度,确保工程的质量,特对电子 图纸坐标系的转换方法和步骤简介如下。 特别说明:刚拿到的电子图纸和我们平时画的图一般都是数学坐标没有转换为大地坐标的图纸,也就要将数学坐标或其他坐标的图纸转换为大地坐标的图纸在CAD上面体现出来。设计院出的图纸一般为天正出图,一般的单位为mm,而全站仪用到的是以m为单位的,是 1000倍的。 1、确定电子图纸坐标系的夹角。如果所承建的工程不是座落在正南正北方向上的话,就要确定设计的现场轴线测量坐标系与电子图纸上的轴线坐标系所存在的夹角度数(如东莞玉兰大剧院工程所存在的夹角度数为75.4823°)。方法:就是用90°减去设计图纸上坐标方格轴线纵横方位角中小于90°的方位角即可。 2、旋转电子图纸的面。方法:在CAD的命令行里输入UCS—新建N—X轴—180°—回车。 意思是说整个图纸以X轴为旋转轴顺时针旋转了一个180°的面。 3、旋转电子图纸的坐标系。方法:利用直线命令在操作面上画出“十”字标志,然后用旋 转命令旋转第一步中所知道的夹角度数。 4、定义电子图纸的坐标系。方法:在CAD的命令行里输入UCS—新建N—三点—原点(用光标选中“十”字标志的交叉点)—X轴(用光标选中“十”字标志竖轴的正上方端点)—Y 轴(用光标选中“十”字标志横轴的右手方端点)—回车。意思就是确定电子图纸轴线坐 标系的X轴和Y轴的方向。 5、定义电子图纸的坐标原点。方法:由于电子图纸上的轴线坐标点在没有转换坐标系之前,该点的实际坐标值与图纸上所标注的坐标值是不一致的,所以首先要在电子图纸上找到有坐标值的点作为基点,然后用相对坐标法画直线,在直线命令中输入下一点时就要按“@-x,-y”的方法输入该基点的坐标值,最后在画完直线后就要定义原点了,也是在命令行里输入UCS—新建N—指定原点(用光标选中上述所画的直线端点)—回车。 6、校核电子图纸的坐标系。方法:利用“十”字光标指定到有坐标值的点位上,查看该点位实际坐标值与图纸上标注的坐标值是否一致,如果相同则说明转换成功,如果不同则要重新进行转换。为了方便以后的操作,经过转换坐标系的图纸最好是另外存在一个文件夹 内,不要替换原始的设计图纸。 说明: 第一步的步骤是先把总平面图上的有坐标的轴线交点的坐标值输入到电子图中,查询总平
坐标系转换问题及转换参数的计算方法
坐标系转换问题及转换参数的计算方法 对于坐标系的转换,给很多GPS的使用者造成一些迷惑,尤其是对于刚刚接触的人,搞不明白到底是怎么一回事。我对坐标系的转换问题,也是一知半解,对于没学过测量专业的人来说,各种参数的搞来搞去实在让人迷糊。在我有限的理解范围内,我想在这里简单介绍一下,主要是抛砖引玉,希望能引出更多的高手来指点迷津。 我们常见的坐标转换问题,多数为WGS84转换成北京54或西安80坐标系。其中WGS84坐标系属于大地坐标,就是我们常说的经纬度坐标,而北京54或者西安80属于平面直角坐标。对于什么是大地坐标,什么是平面直角坐标,以及他们如何建立,我们可以另外讨论。这里不多罗嗦。 那么,为什么要做这样的坐标转换呢? 因为GPS卫星星历是以WGS84坐标系为根据而建立的,我国目前应用的地形图却属于1954年北京坐标系或1980年国家大地坐标系;因为不同坐标系之间存在着平移和旋转关系(WGS84坐标系与我国应用的坐标系之间的误差约为80),所以在我国应用GPS进行绝对定位必须进行坐标转换,转换后的绝对定位精度可由80提高到5-10米。简单的来说,就一句话,减小误差,提高精度。 下面要说到的,才是我们要讨论的根本问题:如何在WGS84坐标系和北京54坐标系之间进行转换。 说到坐标系转换,还要罗嗦两句,就是上面提到过的椭球模型。我们都知道,地球是一个近似的椭球体。因此为了研究方便,科学家们根据各自的理论建立了不同的椭球模型来模拟地球的形状。而且我们刚才讨论了半天的各种坐标系也是建立在这些椭球基准之上的。比如北京54坐标系采用的就是克拉索夫斯基椭球模型。而对应于WGS84坐标系有一个WGS84椭球,其常数采用IUGG第17届大会大地测量常数的推荐值。WGS84椭球两个最常用的几何常数:长半轴:6378137±2(m);扁率:1:298.257223563 之所以说到半长轴和扁率倒数是因为要在不同的坐标系之间转换,就需要转换不同的椭球基准。这就需要两个很重要的转换参数dA、dF。 dA的含义是两个椭球基准之间半长轴的差;dF的含义是两个椭球基准之间扁率倒数的差。 在进行坐标转换时,这两个转换参数是固定的,这里,我们给出在进行84—〉54,84—〉80坐标转换时候的这两个参数如下: WGS84>北京54:DA:-108;DF:0.0000005 WGS84>西安80:DA: -3 ;DF: 0 椭球的基准转换过来了,那么由于建立椭球的原点还是不一致的,还需要在dXdYdZ这三个空间平移参量,来将两个不同的椭球原点重合,这样一来才能使两个坐标系的椭球完全转换过来。而由于各地的地理位置不同,所以在各个地方的这三个坐标轴平移参量也是不同的,因此需要用当地的已知点来计算这三个参数。具体的计算方法是: 第一步:搜集应用区域内GPS“B”级网三个以上网点WGS84坐标系B、L、H值及我国坐标系(BJ54或西安80)B、L、h、x值。(注:B、L、H分别为大地坐标系中的大地纬度、大地经度及大地高,h、x分别为大地坐标系中的高程及高程异常。各参数可以通过各省级测绘局或测绘院具有“A”级、“B”级网的单位获得。) 第二步:计算不同坐标系三维直角坐标值。计算公式如下: