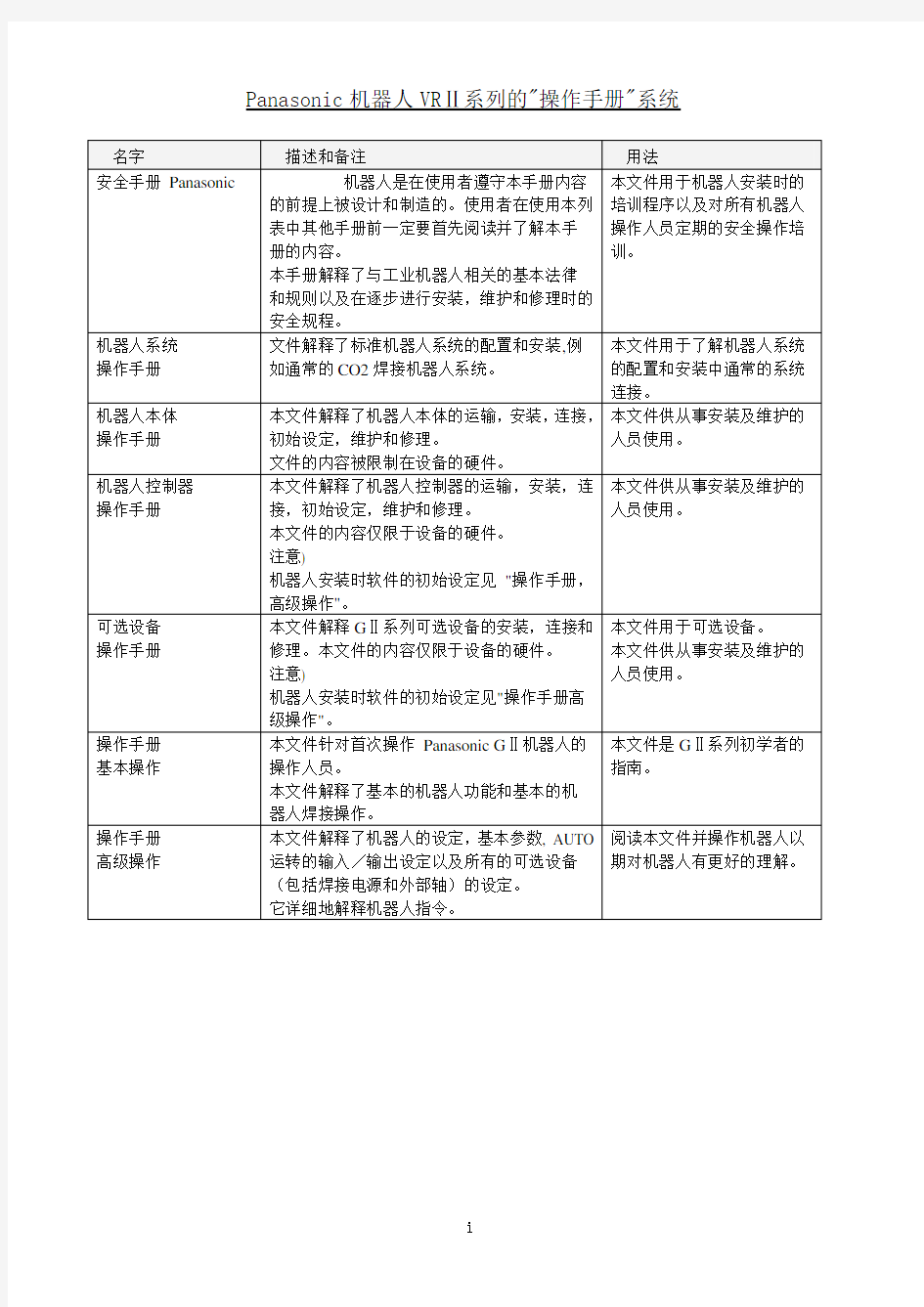
松下机器人操作说明

松下焊接机器人操作规程
松下机器人操作规程 一、资格要求: 1.1设备操作人员必须经过松下机器人的专业培训,取得机器人操作合格证后 上岗。 1.2没有使用部门的领导安排,不得擅自对设备的内部设定修改。 1.3禁止有参加培训的人员,擅自非法操作设备。 二、设备操作前的检查: 2.1机器人本体、控制柜、焊接电源示教盒及各附件连接电缆的外观良好。 2.2消耗品(焊丝、气体、导电嘴等)的确认,库存是否足够。 2.3部品件的夹具工作状况确认。 2.4设备急停按钮的有效确认。 2.5设备周边环境的确认(无易燃、易爆物及其他与工作不相关物品)。 2.6操作人员必要劳保用品的确认。 三、设备操作规程的规定: 3.1遵守设备上的危险、警告、注意、强制、禁止标志. 3.2依照正常的顺序对设备进行开机、关机。 3.3设备启动前一定要确认机器人工作范围内无干涉。 3.4设备工作中停顿,在示教盒上一般会有相应画面的显示,在画面显示的信 息没有得到记录并处理时,不要继续操作设备。 3.5操作人员除对焊接程序的修正外,禁止作其它影响设备正常工作的操作。 3.6因工作需要,对设备进行相应的改造时,需知会设备供应商,作相应的确 认。 3.7设备出现焊接过程中出现与平常不一样情况时,一定要找到造成这种不一
样状况的原因才能操作设备(工件、夹具、消耗品、设备)。 3.8对设备的清洁,严禁用水或其他液态清洁剂或含有水份的压缩空气。 3.9禁止对机器人本体擅自添加任何油品。 3.10机器人示教盒及电缆属于易损件,平时应加以保护,特别是不使用时要 放置于安全位置。 3.11设备每次开始运行或停顿,均要停放在安全位置。 3.12设备运作过程中,出现任何异常,应停止工作,记录异常情况,并知会 设备供应商,确认是否可继续工作。 四、设备点检与保养: 4.1每天开机前对设备的外观良好确认。 4.2每周对焊接电源及机器人本体清洁。 4.3依照设备定期保养表对设备进行保养。 4.4设备点检与保养建议由专业人员对应。 五、相关记录 5.1点检表(客户根据设备点检内容按ISO的规定自行作成点检表) 5.2保养及维修记录(客户按ISO的规定对每台设备自行作成保养及维修记录 表)
松下机器人故障手册
A3000焊接控制板CPU异常-焊接控制板的动作异常无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3010焊接控制板CPU/传感器 CPU异常 - 焊接控制板或者传感器CPU板的动作异 常 无 ①更换焊接控制板(ZUEP5750*) ②更换传感器CPU板 ③更换主CPU板(ZUEP5585*) 1.0 0.5 1.5 A3011内部区分异常(SNS、 WELD) -主CPU板的动作异常无更换主CPU板(ZUEP5585*) 1.5 A3020焊接控制板DSP异常-焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3030焊接控制板DSP通讯异常1焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3030焊接控制板DSP通讯异常2焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3100焊接控制板通讯异常1主CPU板和焊接控制板不能通讯无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3100焊接控制板通讯异常2主CPU板和焊接控制板不能通讯无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3100焊接控制板通讯异常3主CPU板和焊接控制板不能通讯无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3100焊接控制板通讯异常4主CPU板和焊接控制板不能通讯无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3100焊接控制板通讯异常5主CPU板和焊接控制板不能通讯无①更换焊接控制板(ZUEP5750*) ②更换主CPU板(ZUEP5585*) 1.0 1.5 A3100焊接控制板通讯异常1001焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3100焊接控制板通讯异常1002焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3100焊接控制板通讯异常2001焊接控制板的动作异常无更换焊接控制板(ZUEP5750*) 1.0 A3200焊接报警:1次过电压-检测出TAWERS电源单元1次侧过电压。 输入电压高于AC225V时会被检测出过电 压。输入为220V时也不排除会发生这种 情况! ①确认输入电压(应该在AC220V以下) ①改善电源设备 (请注意可能会有瞬间动作!) ②如果电源设备没有过电压的话,请更换焊接电源部 (电源单元:YA-1QD351T00/AEU01427)。 2.0~ A3210焊接报警:缺相异常-检测出TAWERS电源单元缺相。在AUTO模 式下打开伺服后,检测了电源单元内D1 ~电磁开关之间的电压。即使只有半个 波的缺相也会有所反映。 ①确认输入是否为3相(应该在AC170V以上) ①改善电源设备 (请注意可能会有瞬间动作!) ②如果电源设备没有缺相的话,请更换焊接电源部(电 源单元:YA-1QD351T00/AEU01427)。 2.0~ A3220焊接报警:检测出2次侧 主回路异常 - 检测出TAWERS电源单元的2次侧主回路 有异常。2次IGBT打开时,当检测出C-E 之间的电压长时间大于规定数值(4V以 上)的话,将变成该模式。 无 请更换焊接电源部(电源单元:YA- 1QD351T00/AEU01427)。 2.0~ A3230焊接报警:检测出2次侧 过电压 - 在2次侧主回路中加上了「瞬间电压 DC150V或DC120V500μS以上」的电压。 ①确认2次侧主回路和电机电源线的地线。 ②确认焊接控制板和焊接电源板之间的带状 电缆(误检测) ①确认地线位置 ②更换带状电缆 ③更换焊接控制板(ZUEP5750*) ④更换控制装置 0.5 0.5 1.0 2.0~
松下机器人操作规程
龙华五金松下机器人操作规程 1.安全规则及安全管理 1)为操作者提供充分的安全教育和操作指导。 2)确保为操作者提供充足的操作时间和正确的指导以便其能熟练使用。 3)指导操作者穿戴指定的防护用具。 4)注意操作者的健康状况,不要对操作者提出无理要求。 5)教育操作者在设备自动运转时不要进入安全护栏。 6)一定不要将机器人用于说明书中所指定应用范围之外的其它应用。 7)建立规章制度禁止无关人员进入机器人安装场所,并确保制度的实施。 8)操作者要保持机器人本体、控制柜、夹具及周围场所的整洁。(防止意外绊倒等所引发的安全事故)。 9)指定专人保管控制柜钥匙和门互锁装置的安全插销。 2.工作场所的安全预防措施请保持作业区域及设备的整洁 1)如果地面上有油、水、工具、工件时,可能绊倒操作者引发严重事故。 2)工具用完后必须放回到机器人动作范围外的原位置保存。 3)机器人可能与遗忘在夹具上的工具发生碰撞,造成夹具或机器人的损坏。 4)操作结束后要打扫机器人和夹具。 3.安全预防措施 操作前的安全预防措施: 1)编程人员应目视检察机器人系统及安全区,确认无引发危险的外在因素存在。检查示教盒,确认能正常操作。开始编程前要排除任何错误和故障。检查示教模式下的运动速度。在示教模式下,机器人控制点的最大运动速度限制在15 m/min (25 mm/s) 以内。当用户进入示教模式后,请确认机器人的运动速度是否被正确限定,正确使用安全开关。 2)在紧急情况下,放开开关或用力按下可使机器人紧急停止。开始操作前,请检查确认安全开关是否起作用。请确认在操作过程中以正确方式握住示教盒,以便随时采取措施。正确使用紧急停止开关。紧急停止开关位于示教盒的右上角。开始操作前,请确认紧急停止开关起作用。请检查确认所有的外部紧急停止开关都能正常工作。如果用户离开示教盒进行其他操作时,请按下示教盒上的紧急停止开关,以确保安全。 操作过程中的安全预防措施: 操作人员必须遵守的基本操作规程如下:禁止将机器人用于规格数所允许范围之外的其它用途。了解基本的安全规则和警告标示如:“易燃”、“高压”、“危险”等,并认真遵守。禁止靠在控制柜上或无意按下任何开关。禁止向机器人本体施加任何不当的外力。请注意在机器人本体周围的举止,不允许有危险行为或进行玩耍。注意保持身体健康–以便随时对危险情况做出反应。 电弧焊接时的安全预防措施: 请使用电焊眼镜或其它防护设备,防止操作者或其他人员受到焊接弧光、烟尘、飞溅及噪音的伤害或影响。弧光可能对皮肤及眼睛造成伤害。焊接中所产生的飞溅可能烫伤眼睛或皮肤。进行焊接作业或监测焊接作业时,请佩戴遮光用深色眼镜,焊接用皮质防护手套等。
松下机器人操作
松下产业用机器人机器人系统中心 GⅡ控制器 基本操作卷 (标准)(焊接电源内藏)
-目录- ①示教器说明 ?各种功能键说明 2 ?如何正确使用示教器 3 ?ID设定 4 ②机器人手动运转操作 ?如何进行操作 5 ?机器人运动6-7 ?微动量的设定7 ?暂停?紧急停止7 ③示教操作(新程序的创建) ?示教的速度8 ?如何进入示教模式?如何登录示教点9 ?示教点登录界面10 ?退出当前示教模式11 ?示教操作时功能键的使用11 ?示教的详细设定12 ?示教时的扩张机能设定12 ④文件(程序)的检查?修正(跟踪) ?当前所示教程序的跟踪?修正13 ?所选择程序跟踪?修正14 ?退出当前检查?修正操作15 ?程序跟踪时对示教点的操作(添加?变更?删除) 16-17 ?退出示教模式?返回视窗界面18 ?示教速度的变更18 ⑤圆弧的示教 ?圆弧插补(正确的示教方法?不正确的示教方法) 19 ⑥摆动运动的示教 ?示教方法20-21 ?摆动开始点?跟踪前后动作22 ?摆动运动示教点的删除?以及不完全删除后的运动23 ?摆动运动条件的限制23 ⑦焊接区间的定义 ?焊接开始点?中间点?结束点的命令24 ⑧编辑操作 ?打开/关闭文件(程序) 25 ?操作注意点26 ?命令的变更(ARC-SET,ARC-ON)?命令的删除27 ?命令的追加(输入ON,OFF,等待输入)28 ?命令的追加(等待时间),变更(等待时间)29 ?输入数值的变更30 ?使用MDI操作进行位置修正30 ?示教点的序号重新排序 ?置换操作(焊接条件?速度的成批替换)31 31 ⑨运转 ?启动方式 ?送丝/气体检查?运转条件限制32 32 32 ?运转中示教点的修正33 ⑩示教练习 ?直线示教练习34 ?直线修正练习35 ?圆弧示教练习36 ?圆弧修正练习37 ?摆动运动示教练习38 ?摆动修正练习39 ?综合练习40