角度测量原理
角度测量原理
内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。
重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法;
难点:光学经纬仪的检验与校正。
§ 3.1 角度测量原理
角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。
一、水平角定义
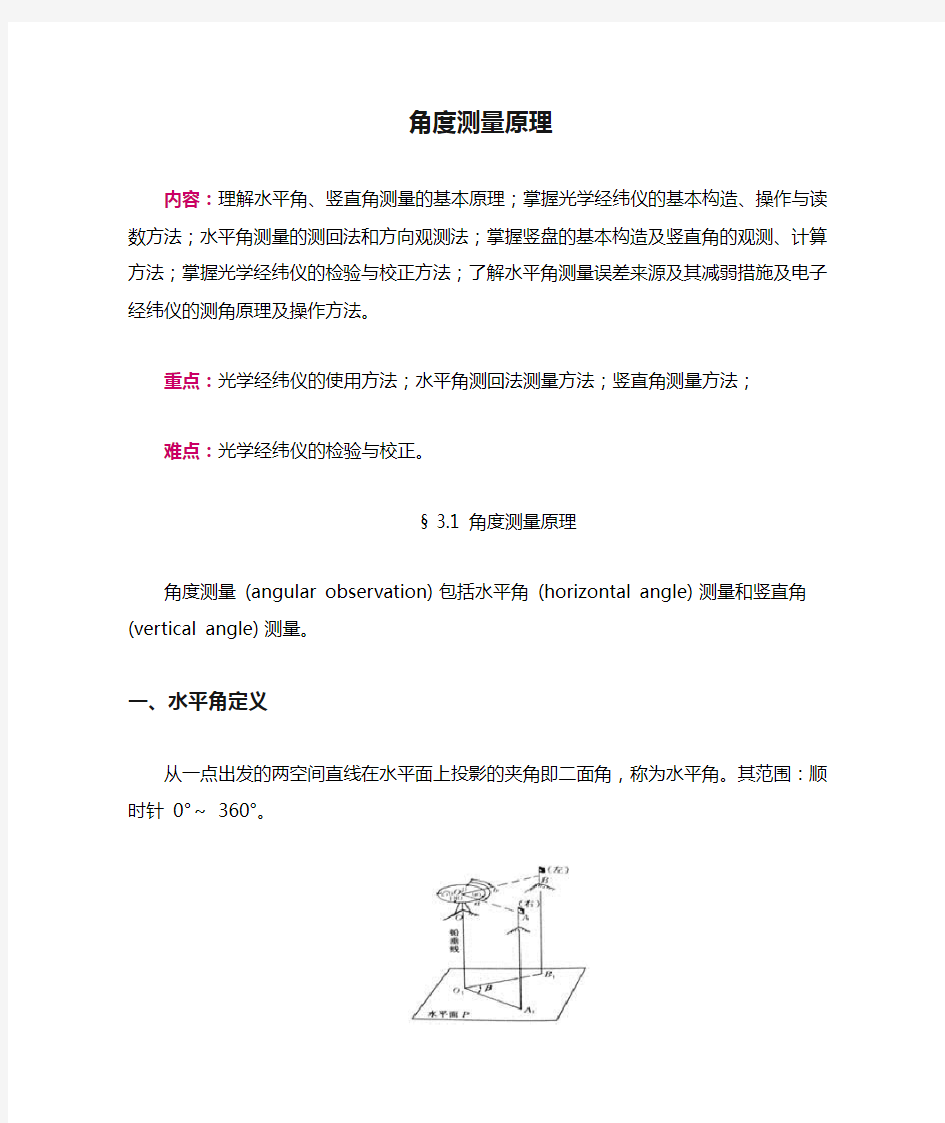
从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。其范围:顺时针0°~360°。
二、竖直角定义
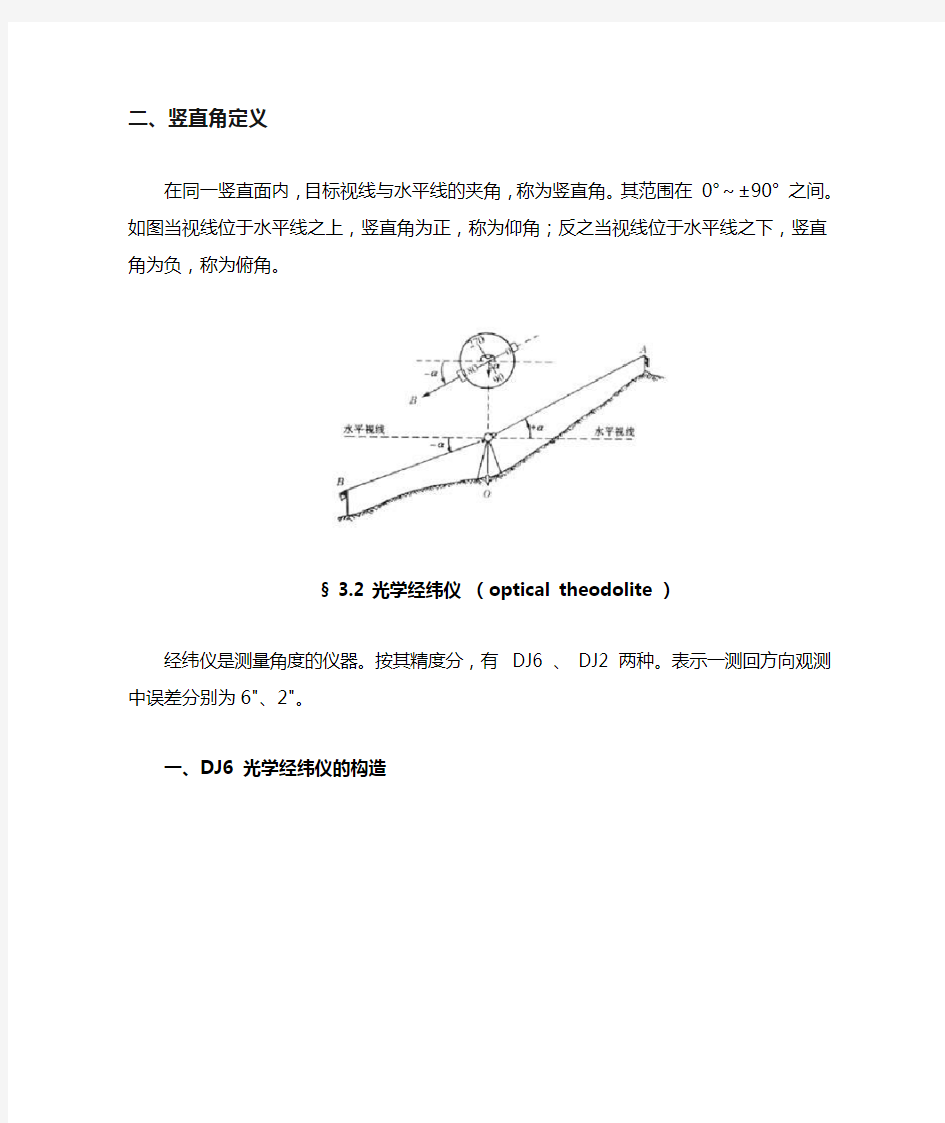
在同一竖直面内,目标视线与水平线的夹角,称为竖直角。其范围在0°~±90°之间。如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite )
经纬仪是测量角度的仪器。按其精度分,有DJ6 、DJ2 两种。表示一测回方向观测中误差分别为6"、2"。
一、DJ6 光学经纬仪的构造
DJ6 光学经纬仪图
1、照准部(alidade)
2、水平度盘(horizontal circle)
3、基座(tribrach)
二、J6的读数方法
1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。如图,水平度盘读数为:73°04ˊ24"。
2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。
三、J2 光学经纬仪的构造
如图与J6 相比,增加了:
1、测微轮——用于读数时,对径分划线影像符合。
2、换像手轮——用于水平读数和竖直读数间的互换。
3、竖直读盘反光镜——竖直读数时反光。
四、J2 的读数方法
一般采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。
五、经纬仪的安置
内容及要求:
对中(centering) ±小于3mm
整平(leveling) 小于1 格
1、垂球对中整平法步骤
(1)移动或伸缩三脚架(粗略对中)
(2)脚架头上移动仪器(精确对中)
(3)旋转脚螺旋使水准管气泡居中(整平)
(4)反复(2)、(3)两步。
2、光学对中整平法步骤
(1)大致水平大致对中
眼睛看着对中器,拖动三脚架 2 个脚,使仪器大致对中,并保持“ 架头” 大致水平。(2)伸缩脚架粗平
根据气泡位置,伸缩三脚架 2 个脚,使圆水准气泡居中。
(3)旋转三个脚螺旋精平
按“左手大拇指法则”旋转三个脚螺旋,使水准管气泡居中。
1)转动仪器,使水准管与1 、2 脚螺旋连线平行。
2)根据气泡位置运用法则,对向旋转 1 、2 脚螺旋。
3)转动仪器90°,运用法则,旋转 3 脚螺旋。
(4)架头上移动仪器,精确对中
(5)脚螺旋精平。
(6)反复(4)、(5)两步。
旋转三个脚螺旋进行精平的示意图
§ 3.3 水平角测量(horizontal angle observation)
水平角的测量方法常用的有测回法(method of observation set) 、方向观测法(method of direction observation) 。
一、经纬仪(theodolite,transit) 的安置
内容及要求:
对中(centering) 小于± 3mm
整平(leveling) 小于1 格
1、垂球(plumb bob) 法
2、光学对中器(optical plummet )法
二、瞄准方法
步骤:粗瞄—制动—调焦—微动精瞄。
两个基本概念:盘左(正镜)、盘右(倒镜)
三、测回法
1、适用:两个方向的单角(∠AOB )。
2、观测步骤:
(1)盘左瞄准左边A ,配度盘至0°0X ′,读取a1 。
(2)顺时针旋转瞄准右边B ,读取b1 。则上半测回角值:β1 =b1 -a1 。(3)倒镜成盘右,瞄准右边 B ,读取b2 。
(4)逆时针旋转瞄准左边A ,读取a2 。则下半测回角值:β2 =b2 -a2 (5)计算角值。若β1 - β2 ≤± 40" (图根级)则有:β = (β1 + β2)/2 3、记录格式
测站
盘位
目标
水平度盘读数
° ′ ″
半测回角值
° ′ ″
一测回角值
° ′ ″
备注
O
左
A
00 01 12
70 12 36
70 12 33
B
70 13 48
右
A
180 01 24
70 12 30
B
250 13 54
若要观测n 个测回,为减少度盘分划误差,各测回间应按180°/n 的差值来配置水平度盘。
测回法测水平角方法,可小结如下:
四、方向观测法
1、适用:在一个测站上需要观测两个以上方向。
2、观测步骤:(如下图,有四个观测方向)
(1)上半测回
选择一明显目标A 作为起始方向(零方向),用盘左瞄准 A ,配置度盘,顺时针依次观测 A 、B 、C 、D 、A 。
(2)下半测回
倒镜成盘右,逆时针依次观测 A 、 D 、 C 、 B 、A 。
同理各测回间按180°/n 的差值,来配置水平度盘。
3、记录、计算
(1)2C 值(两倍照准误差):
2C = 盘左读数-(盘右读数± 180°)。
一测回内2C 互差,对J2 ≤18"。对J6 不作要求。
(2)半测回归零差:
对J2 ≤ 12";对J6 ≤18" 。
(3)各方向盘左、盘右读数的平均值:
平均值=[ 盘左读数+(盘右读数± 180°)]/2
注意:零方向观测两次,应将平均值再取平均。
(4)归零方向值:
将各方向平均值分别减去零方向平均值,即得各方向归零方向值。
(5)各测回归零方向值的平均值:
同一方向值各测回间互差,对J2 ≤12" ;对J 6 ≤ 24"。
方向观测法可小结如下:
§ 3.4 竖直角测量
一、竖直度盘(vertical circle ) 的构造
1、竖直度盘的构造包括:
(1) 竖盘(vertical circle)
(2) 竖盘指标水准管(vertical index bubble tube)
(3) 竖盘指标水准管微动螺旋。
其中,竖盘指标水准管和竖盘指标水准管微动螺旋,可采用竖盘指标自动归零补偿器(vertical index compensator) 来替代。
2、指标线固定不动,而整个竖盘随望远镜一起转动。
3、竖盘的注记形式有顺时针与逆时针两种。
二、竖直角(vertical angle) 的计算公式
1、顺时针注记形式
故有:α左=90°-L ,α右=R-270°
一测回竖直角α = (α左+ α右)/2
2、逆时针注记形式
有:α左=L-90°,α右=270°-R
一测回的竖直角为:α =(α左+ α右)/2
三、竖盘指标差(index error of vertical circle)
1、定义
由于指标线偏移,当视线水平时,竖盘读数不是恰好等于90°或270°上,而是与90°或270°相差一个x 角,称为竖盘指标差。当偏移方向与竖盘注记增加方向一致时,x 为正,反之为负。
2、计算公式
(1)指标差:x= (L+R-360°)/2
对于顺时针注记的:
正确的竖直角α=(90°+ x )-L= α左+ x
α=R-(270°+x )= α右- x
(2)结论:取盘左盘右的平均值,可消除指标差的影响。
四、竖直角的观测及记录(格式见表)
一般规范规定,指标差变动范围,J6 ≤25" 、J2 ≤15" 。
测站
目标
盘位
竖盘读数
° ′ ″
半测回竖直角
° ′ ″
指标差
(" )
一个测回竖直角
° ′ ″
备注
O
M
左
76 45 12
13 14 48
-6
13 14 42
竖直度盘是顺时针注记的。
右
283 14 36
13 14 36
N
左
122 03 36
-32 03 36
12
-32 03 24
右
237 56 48
-32 03 12
§ 3.5 光学经纬仪的检验与校正如图所示,经纬仪的主要轴线:
1、竖轴VV(vertical axis)
2、水准管轴LL(bubble tube axis)
3、横轴HH(horizontal axis)
4、视准轴CC(collimation axis)
5、圆水准器轴L'L'(circle bubble axis)
一、经纬仪轴线应满足的条件
1、VV ⊥LL ——照准部水准管轴的检校。
2、HH ⊥十字丝竖丝——十字丝竖丝的检校
3、HH ⊥CC ——视准轴的检校
4、HH ⊥VV ——横轴的检校
5、竖盘指标差应为零——指标差的检校
6、光学垂线与VV 重合——光学对中器的检校
7、圆水准轴L'L' ∥VV ——圆水准器的检验与校正( 次要)
二、经纬仪的检验与校正
1、照准部水准管轴的检校
(1)检验:用任意两脚螺旋使水准管气泡居中,然后将照准部旋转180°,若气泡偏离 1 格,则需校正。
(2)校正:用脚螺旋使气泡向中央移动一半后,再拨动水准管校正螺丝,使气泡居中。此时若圆水准器气泡不居中,则拨动圆水准器校正螺丝。
2、十字丝竖丝的检校
(1)检验:用十字丝交点对准一目标点,再转动望远镜微动螺旋,看目标点是否始终在竖丝上移动。
(2)校正:微松十字丝的四个压环螺丝,转动十字丝环,使目标点始终在竖丝上移动。
3、视准轴的检校
(1)检验:如图,在平坦地面上选择一直线AB ,约60m ~100m ,在AB 中点O 架仪,并在 B 点垂直横置一小尺。盘左瞄准 A ,倒镜在 B 点小尺上读取B1 ;再用盘右瞄准 A ,倒镜在 B 点小尺上读取B2 。
J6 :2c >60" ;J2 :2c >30" 时,则需校正。
(2)校正:拨动十字丝左右两个校正螺丝,使十字丝交点由B2 点移至BB2 中点B3 。
4、横轴的检验与校正
(1)检验:
如图,在20—30m 处的墙上选一仰角大于30°的目标点P ,先用盘左瞄准P 点,放平望远镜,在墙上定出P1 点;再用盘右瞄准P 点,放平望远镜,在墙上定出P2 点。
对J6 经纬仪:i>20"时,则需校正。
(2)校正:
用十字丝交点瞄准P1 P2 的中点M ,抬高望远镜,并打开横轴一端的护盖,调整支承横轴的偏心轴环,抬高或降低横轴一端,直至交点瞄准P 点。此项校正一般由仪器检修人员进行。
5、指标差的检校
(1)检验:用盘左、盘右先后瞄准同一目标,计算指标差x=(L+R-360°)/2 。
对J6 经纬仪:x>1′;J2 经纬仪:x>30" 时,要进行校正。
(2)校正:用指标水准管微动螺旋使中丝对准(R-x)位置,再有拨针使指标气泡居中。
6、光学对中器的检校
(1)检验:精密安置仪器后,将刻划中心在地面上投下一点,再旋转照准部,每隔120°投下一点,若三点不重合,则需校正。
(2)校正:用拨针使刻划中心向三点的外接圆心移动一半。
7、圆水准器的检校(次要)
(1)检验:精平(水准管气泡居中)后,若圆水准气泡不居中,则需校正。
(2)校正:用圆水准气泡校正螺丝使其居中。
§ 3.6 水平角观测的误差分析
一、仪器构造误差
(一)视准轴误差的影响,盘左盘右观测的平均值可抵消该误差。
(二)横轴不水平误差的影响,盘左盘右观测的平均值可抵消该误差。
(三)纵轴误差的影响
(1) 纵轴误差的影响不仅随观测目标的垂直角的增大而增大,而且与横轴所处的方向有关;
(2) 盘左盘右取平均不能消除该项误差。
(四)照准部偏心差的影响在度盘对径方向上读取读数而取平均值的方法及盘左、盘右读数的平均值都可消除该项误差的影响。
(五)其他仪器误差的影响度盘刻划不均匀误差,竖盘指标差。
二、与观测者有关的误差
(1)仪器对中误差
(2)目标偏心误差
(3)照准误差
(4)读数误差
三、与外界条件有关的误差
(1)温度的变化
(2)大风的影响
(3)大气折光
(4)大气透明度
(5)地面稳定性
四、角度测量的注意事项:
1、观测前应检校仪器。
2、安置仪器要稳定,应仔细对中和整平。一测回内不得再对中整平。
3、目标应竖直,尽可能瞄准目标低部。
4、严格遵守各项操作规定和限差要求。
5、当对一水平角进行m 个测回观测,各测回应配度盘,每测回观测度盘起始读数变动值为180/m
6、观测时尽量用十字丝中间部分。水平角用竖丝,竖直角用横丝。
7、读数应果断、准确。特别应注意估读数。当场计算,如有错误或超限,应立即重测。
8、选择有利的观测时间和避开不利的外界条件。
§ 3.7 电子经纬仪
60 年代以来,随着近代光学、电子学的发展,使角度测量向自动化记录方向改进有了技术基础,从而出现了电子经纬仪等自动化测角仪器。电子经纬仪在结构及外现上和光学经纬仪相类似,主要不同点在于读数系统,它采用光电扫描和电子元件进行自动读数和液晶显示。电子测角虽然仍旧是采用度盘来进行,但不是按度盘上的刻划,用光学续数法读取角度值,而是以度盘上取得电信号,再将电信号转换成角度值。电子测角的度盘主要有编码度盘、光栅度盘和动态测角度盘三种形式。因此,电子测角也就有编码度盘测角,光栅度盘测角和编码度盘结合测角,以及动态测角等四种形式。如瑞士克恩( KERN) 厂的E 1 型和E2 型电子经纬仪采用光栅度盘,德国OPTONJ于1978 年生产的Elta-2 型电子速测仪,采用的是编码度盘,而现在主流速测仪的测角系统大多用的是动态测角系统,测角精度可达0.5″。从90 年代起,国内厂家如北京光学仪器厂、南方测绘仪器公司生产的电子经纬仪测角精度均在在5″左右。以下是北京和苏州生产的两款电子经纬仪。
雷达大作业---振幅和差角度测量及仿真
雷达原理大作业 单脉冲自动测角的原理及应用 学院:电子工程学院 作者: 2016年5月21日
单脉冲自动测角的原理及应用 一.摘要 单脉冲测角法是属于振幅法测角中的等信号法中的一种,其测角精度高,抗干扰能力强,在现实中得到了广泛的应用。而其中对于接收支路要求不太严格的双平面振幅和差式单脉冲雷达,更是备受青睐。 本文首先讲述了单平面振幅和差式单脉冲雷达自动测角的原理,再简述了双平面振幅和差式单脉冲雷达自动测角的结构框图,接着简述了本文仿真所用的一些原理和公式推导,包括天线方向图函数及其导数的推导,最后做了基于高斯形天线方向图函数的单脉冲自动测角,基于辛克函数形天线方向图函数的单脉冲自动测角,和基于高斯形天线方向图函数的双平面单脉冲自动测角。源代码在附录里。 二.重要的符号说明 三.单平面振幅和差式单脉冲自动测角原理 单脉冲测角法是属于振幅法测角中的等信号法中的一种。在单平面内,两个相同的波束部分重叠,交叠方向即为等信号轴的方向。将这两个波束接收到的回波信号进行比较就可以在一定范围内,一定精度要求下测到目标的所在角度。因为两个波束同时接到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲即可,所以称之为“单脉冲”。 因取出角误差的具体方式不同,单脉冲雷达种类很多,其中应用最广的是振幅和差式单脉冲雷达,其基本原理说明如下: 1.角误差信号 雷达天线在一个平面内有两个重叠的部分,如下图1所示: 图1.振幅和差式单脉冲雷达波束图
(a)两馈源形成的波束 (b)和波束 (c)差波束 振幅和差式单脉冲雷达取得角误差信号基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。其中差信号即为该角平面内角误差信号。 若目标处在天线轴方向(等信号轴),误差角0ε=,则两波束收到的回波信号振幅相同,差信号等于0。目标偏离等信号轴而有一个误差角ε时,差信号输出振幅与ε成正比而其符号则由偏离方向决定。 2.和差比较器 这里主要使用双T 插头,示意图如下图2(a )所示。它有四个端口:和端,差端和1, 2端。假定四个端都是匹配的,则从和端输出信号时,1,2端输出等幅同相的信号,差端无输出;从1,2端输入同相信号时,和端输出两信号之和,差端输出两信号之差。 图2.双T 接头和差比较器示意图 (a)双T 接头 (b) 和差比较器示意图 在发射信号时,从发射机来的信号加在和端,故1,2端输出等幅同相的信号,两波束在空间各点产生的场强同相相加,形成发射和波束的天线方向性函数为()F θ∑。 接收时,回波脉冲同时加到1,2端,此时在和端,输出两个回波信号同相相加之和,记为E ∑;在差端,输出两信号反相相加之和,记为E ?。 假设两个波束方向性函数完全相同,记为()F θ,两波束衰减倍数为k ,两波束相对天线轴线的偏角为δ,则对于θ方向的目标来说: 和信号振幅为:2 ()()()()()E kF F kF F kF θδθθδθθ∑∑∑∑=-++= 差信号振幅为:()()()()()()E kF F kF F kF F θδθθδθθθ?∑∑∑?=--+= 其中:()()()F F F θδθδθ∑=-++,()()()F F F θδθδθ?=--+。 实际情况下,θ是很小的,可以对()F δθ-和()F δθ+在δ附近做一阶泰勒展开:
工程测量原理与方法
第二讲工程测量学的原理、方法和技术Theory,way,technology of engineering surveying 主要内容:观测量和测量定位原理、地面测量方法和技术、专用测量方法与技术、空间测量方法与技术。 难点:专用测量方法与技术、空间测量方法与技术 2. 1概述 工程测量学与大地测量学、摄影测量与遥感学、地图制图学海洋测绘和 测绘仪器学一样,是现代测绘学的分支学科。它即遵循测绘学的基本原理、方法和技术,又为了解决工程和工程建设中的测绘技术问题,工程测量学也形成了具有自身特点的原理、方法和技术,以及各种专用和通用的测量仪器。 2. 2 观测量和测量定位原理 2. 2. 1工程测量中的观测量 工程测量的实质是: 1>通过各种观测量确定客观物体上的特征点在某一坐标系下的三维坐标(平面位置与高程即X,丫,H)及其随时间的变化。 2>根据设计坐标(X,丫,Z)通过各种观测量将设计实体放样到实地。 观测量: 1>角度(方向)观测量 角度观测量又分水平角和垂直角(高度角)或天顶距(观测方向线与铅垂线间的夹角) 所用仪器:经纬仪、全站仪 2>距离观测量 两点间的平距、斜距,一点到直线的距离,一点到平面的距离。 所用仪器:钢尺、皮尺、铟瓦线尺(叫丈量法或机械法) 经纬仪、视距仪(叫视距法或视差法) 测距仪、全站仪(叫物理测距法) GPS全球定位系统(伪距法) 3>高差观测量 两点正常高程之差 所用仪器:钢尺、水准仪、测距仪、全站仪、液体静力水准测量(用于工程变形测量) 4>方位角观测量 地面上某一方向线与真北方向的夹角(真方位角) 所用仪器:陀螺仪(用于矿山、铁路与公路隧道及城市地铁隧道中) 2. 2. 2工程测量中测量定位原理 工程测量的任务:测量、测设或放样 工程测量中所采用的坐标系统: 1>平面一高斯一克吕格平面直角坐标系或独立平面直角坐标系 2>高程一正常高系统 测量定位原理: 1>高差与高程的测定 不论进行水准测量还是利用水准仪进行高程放样,均是利用水平视线测定两
经纬仪原理及角度测量方法解析
经纬仪原理及角度测量方法 内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。 重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法; 难点:光学经纬仪的检验与校正。 § 3.1 角度测量原理 角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。 一、水平角定义 从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。其范围:顺时针0°~360°。 二、竖直角定义 在同一竖直面内,目标视线与水平线的夹角,称为竖直角。其范围在0°~±90°之间。如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite ) 经纬仪是测量角度的仪器。按其精度分,有DJ6 、DJ2 两种。表示一测回方向观测中误差分别为6"、2"。 一、DJ6 光学经纬仪的构造 DJ6 光学经纬仪图 1、照准部(alidade) 2、水平度盘(horizontal circle) 3、基座(tribrach) 二、J6的读数方法 1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。如图,水平度盘读数为:73°04ˊ24"。 2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。 三、J2 光学经纬仪的构造
雷达原理复习
1、雷达的任务:测量目标的距离、方位、仰角、速度、形状、表面粗糙度、介电特性。 雷达是利用目标对电磁波的反射现象来发现目标并测定其位置。 当目标尺寸小于雷达分辨单元时,则可将其视为“点”目标,可对目标的距离和空间位置角度定位。目标不是一个点,可视为由多个散射点组成的,从而获得目标的尺寸和形状。采用不同的极化可以测定目标的对称性。 任一目标P所在的位置在球坐标系中可用三个目标确定:目标斜距R,方位角,仰角 在圆柱坐标系中表示为:水平距离D,方位角,高度H 目标斜距的测量:测距的精度和分辨力力与发射信号的带宽有关,脉冲越窄,性能越好。目标角位置的测量:天线尺寸增加,波束变窄,测角精度和角分辨力会提高。 相对速度的测量:观测时间越长,速度测量精度越高。 目标尺寸和形状:比较目标对不同极化波的散射场,就可以提供目标形状不对称性的量度。 2、雷达的基本组成:发射机、天线、接收机、信号处理机、终端设备 3、雷达的工作频率:220MHZ-35GHZ。L波段代表以22cm为中心,1-2GHZ;S波段代表10cm,2-4GHZ;C波段代表5cm,4-8GHZ;X波段代表3cm,8-12GHZ;Ku代表,12-18GHZ;Ka代表8mm,18-27GHZ。 第二章雷达发射机 1、雷达发射机的认为是为雷达系统提供一种满足特定要求的大功率发射信号,经过馈线和收发开关并由天线辐射到空间。 雷达发射机可分为脉冲调制发射机:单级振荡发射机、主振放大式发射机;连续波发射机。 2、单级振荡式发射机组成:大功率射频振荡器、脉冲调制器、电源 触发脉冲 脉冲调制器大功率射频振荡器收发开关 电源高压电源接收机 主要优点:结构简单,比较轻便,效率较高,成本低;缺点:频率稳定性差,难以产生复杂的波形,脉冲信号之间的相位不相等 3、主振放大式发射机:射频放大链、脉冲调制器、固态频率源、高压电源。射频放大链是发射机的核心,主要有前级放大器、中间射频功率放大器、输出射频功率放大器 射频输入前级放大器中间射频放大器输出射级放大器射频输出固态频率源脉冲调制器脉冲调制器 高压电源高压电源电源 脉冲调制器:软性开关调制器、刚性开关调制器、浮动板调制器 4、现代雷达对发射机的主要要求:发射全相参信号;具有很高的频域稳定度;能够产生复杂信号波形;适用于宽带的频率捷变雷达;全固态有源相控阵发射机 5、发射机的主要性能指标: 工作频率和瞬时带宽:雷达发射机的频率是按照雷达的用途确定的。瞬时带宽是指输出功率变化小于1bB的工作频带宽度。 输出功率:雷达发射机的输出功率直接影响雷达的威力范围以及抗干扰的能力。雷达发
角度测量的原理及其方法
角度测量的原理及其方法 角度测量原理 一、水平角测量原理 地面上两条直线之间的夹角在水平面上的投影称为水平角。如图 3-1所示,A、B、O为地面上的任意点,通OA和OB直线各作一垂 直面,并把OA和OB分别投影到水平投影面上,其投影线Oa和Ob 的夹角∠aOb,就是∠AOB的水平角β。 如果在角顶O上安置一个带有水平刻度盘的测角仪器,其度盘 中心O′在通过测站O点的铅垂线上,设OA和OB两条方向线在水 平刻度盘上的投影读数为a1和b1,则水平角β为: β= b1 - a1(3-1) 二、竖直角测量原理 在同一竖直面内视线和水平线之间的夹角称为竖直角或称垂直 角。如图3-2所示,视线在水平线之上称为仰角,符号为正;视线在 水平线之下称为俯角,符号为负。
图3-1 水平角测量原理图图3-2 竖直角测 量原理图 如果在测站点O上安置一个带有竖直刻度盘的测角仪器,其竖盘中心通过水平视线,设照准目标点A时视线的读数为n,水平视线的读数为m,则竖直角α为: α= n - m (3-2) 光学经纬仪 一、DJ6级光学经纬仪的构造 它主要由照准部(包括望远镜、竖直度盘、水准器、读数设备)、水平度盘、基座三部分组成。现将各组成部分分别介绍如下:1.望远镜 望远镜的构造和水准仪望远镜构造基本相同,是用来照准远方目标。它和横轴固连在一起放在支架上,并要求望远镜视准轴垂直于横轴,当横轴水平时,望远镜绕横轴旋转的视准面是一个铅垂面。为了控制望远镜的俯仰程度,在照准部外壳上还设置有一套望远镜制动和
微动螺旋。在照准部外壳上还设置有一套水平制动和微动螺旋,以控制水平方向的转动。当拧紧望远镜或照准部的制动螺旋后,转动微动螺旋,望远镜或照准部才能作微小的转动。 2.水平度盘 水平度盘是用光学玻璃制成圆盘,在盘上按顺时针方向从0°到360°刻有等角度的分划线。相邻两刻划线的格值有1°或30′两种。度盘固定在轴套上,轴套套在轴座上。水平度盘和照准部两者之间的转动关系,由离合器扳手或度盘变换手轮控制。 3.读数设备 我国制造的DJ6型光学经纬仪采用分微尺读数设备,它把度盘和分微尺的影像,通过一系列透镜的放大和棱镜的折射,反映到读数显微镜内进行读数。在读数显微镜内就能看到水平度盘和分微尺影像,如图3-4所示。度盘上两分划线所对的圆心角,称为度盘分划值。 在读数显微镜内所见到的长刻划线和大号数字是度盘分划线及其注记,短刻划线和小号数字是分微尺的分划线及其注记。分微尺的长度等于度盘1°的分划长度,分微尺分成6大格,每大格又分成10,每小格格值为1′,可估读到0.1′。分微尺的0°分划线是其指标线,它所指度盘上的位置与度盘分划线所截的分微尺长度就是分微尺读数值。为了直接读出小数值,使分微尺注数增大方向与度盘注数方向相反。读数时,以在分微尺上的度盘分划线为准读取度数,而后读取该度盘分划线与分微尺指标线之间的分微尺读数的分数,并估读
激光雷达测距原理与其应用
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (1) 1雷达与激光雷达系统 (2) 2激光雷达测距方程研究 (3) 2.1测距方程公式 (3) 2.2发射器特性 (4) 2.3大气传输 (5) 2.4激光目标截面 (5) 2.5接收器特性 (6) 2.6噪声中信号探测 (6) 3伪随机m序列在激光测距雷达中的应用 (7) 3.1测距原理 (7) 3.2 m序列相关积累增益 (8) 3.3 m序列测距精度 (8) 4脉冲激光测距机测距误差的理论分析 (9) 4.1脉冲激光测距机原理 (9) 4.2 测距误差简要分析 (10) 5激光雷达在移动机器人等其它方面中的应用 (10) 6结束语 (11) 致谢 (12) 参考文献 (12)
激光雷达测距原理与其应用 摘要:本文简单介绍激光雷达系统组成,激光雷达系统与普通雷达系统性能的对比,着重阐述激光雷达测距方程的研究。针对激光远程测距中的微弱信号检测,介绍一种基于m序列的激光测距方法,给出了基于高速数字信号处理器的激光测距雷达数字信号处理系统的实现方案,并理论分析了脉冲激光测距机的测距误差。了解并学习激光雷达在移动机器人等其它方面中的应用。 关键词:激光雷达;发射器和接收器特性; 伪随机序列; 脉冲激光;测距误差 Applications and Principles of laser radar ranging Student majoring in Optical Information Science and Technology Ren xiaonan Tutor Shang lianju Abstract:This paper briefly describes the composition of laser radar systems, laser radar system and radar system performance comparison of normal, focusing on the laser radar range equation. Laser Ranging for remote signal detection, presents a introduction of a sequence based on laser ranging method m, gives the high-speed digital signal processor-based laser ranging radar digital signal processing system implementations, and theoretical analysis of the pulse Laser rangefinder range error.We understand and learn application of Laser radar in the mobile robot and other aspects. Key words:Laser radar; Transmitter and receiver characteristics;Pseudo-random sequence;Pulsed laser;Ranging error. 引言:激光雷达是传统雷达技术与现代激光技术相结合的产物,激光具有亮度 高、单色性好、射束窄等优点,成为光雷达的理想光源,因而它是目前激光应用主要的研究领域之一。激光雷达是一项正在迅速发展的高新技术,激光雷达技术从最简单的激光测距技术开始,逐步发展了激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术,使激光雷达成为一类具有多种功能的系统。利用激光作为遥感设备可追溯到30多年以前,从20世纪60年代到70年代,人们进行了多项试验,结果都显示了利用激光进行遥感的巨大潜力,其中包括激光测月和卫星激光测距。激光雷达测量技术是一门新兴技术,在地球科学和行星科学领域有着广泛的应用.LiDAR(LightLaser Detection and Ranging)是激光探测及测距系统的简称,通常指机载对地激光测距技术,对地激光测距的主要目标是获取地质、地形、地貌以及土地利用状况等地表信息。相对于其他遥感技术,LIDAR的相关研究是一个非常新的领域,不论是在提高LIDAR数据精度及质量方面还是在丰富LIDAR数据应用技术方面的研究都相当活跃。随着LIDAR传感器的不断进步,地表采点密度的逐步提高,单束激光可收回波数目的增多,LIDAR数据将提供更为丰富的地表和地物信息。激光测距可分为星载(卫星搭载)、机载(飞机搭载)、车载(汽车搭载)以及定位(定点测量)四大类,目前激光测距仪已投入使用,激光雷达正处在试验阶段,某些激光雷达已付诸实用.本文对激光雷达的测距原理、发射器和接收器特性、束宽、大气传输以及目标截面、外差效率进行分析, 提出基于伪随机序列的激光测距技术 ,可将激光
雷达原理
一、绪论 雷达:无线电探测与测距。利用电磁波对目标检测、定位、跟踪、成像和识别。 雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。 组成框图 雷达测量原理 雷达发射信号: 雷达接收信号: 雷达利用收发信号之间的相关性获取目标信息 雷达组成: 天线:向确定的方向发射和接收特定频段的电磁波 收发开关: 发射状态将发射机输出功率接到天线,保护接收机输入端 接收状态将天线接收信号接到接收机,防止发射机旁路信号 发射机:在特定的时间、以特定的频率和相位产生大功率电磁波 接收机:放大微弱的回波信号,解调目标信息 雷达的工作频率: 工作频率范围:22mhz--35ghz 扩展范围:2mhz--94ghz 绝大部分雷达工作在:200mhz--10000ghz 雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围 分辨力:区分点目标在位置上靠近的能力 距离分辨力:同一方向上两个目标之间最小可区别的距离 角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度 数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一个目标数据的次数。 跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度 发射功率的和调制波形: 发射功率的大小直接影响雷达的作用距离
发射信号的调制波形: 早期简单脉冲波形,近代采用复杂波形 脉冲宽度:脉冲雷达发射信号所占的时间。影响探测能力和距离分辨力 重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。决定单值测距的范围,影响不模糊速区域大小 天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示 天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。机械性扫描和电扫描 接收机的灵敏度:通常规定在保证50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收机的最小可检测信号功率。这个功率越小接收机的灵敏度越高,雷达的作用距离越远。 显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。 电子战对抗中的雷达: 电子战(EW ):敌我双方利用无线电电子装备或器材所进行的电磁信息斗争,包括电子对抗和电子反对抗。 电子对抗(ECM ):为了探测敌方无线电电子装备的电磁信息(电磁侦察),削弱或破坏其使用效能所采取的一切战术、技术措施(电子干扰、伪装、隐身和摧毁) 电子反对抗(ECCM ):在敌方实施电子对抗的条件下,保证我方有效采用电磁信息所采取的一切战术、技术措施(反侦察、抗干扰、反伪装、反隐身、反摧毁) 雷达反干扰 天线抗干扰:低旁瓣、旁瓣对消、波束控制、随机扫描 发射机抗干扰:提高有效辐射功率、频率捷变、频率编码、频率分集、脉冲压缩、波形隐蔽、窄脉冲、重频时变 接收机、信号处理机抗干扰:接收机抗饱和、重频、脉宽鉴别、MTI 、MTD 、积累检测 二、发射机 发射机任务:产生大功率高频振荡发射信号。脉冲雷达要求发射机产生一定宽度、一定重复频率、一定波形的大功率射频脉冲列 基本类型:连续波发射机、脉冲调制发射机(单极振荡式发射机、主振荡式发射机) 输出功率:发射机送到天线输入端的功率 峰值功率:脉冲期间发射机输出功率的平均值(不要过分增大法设计的峰值功率) 平均功率:脉冲重复周期内输出功率的平均值: 工作比D: 常规脉冲雷达工作比0.001 脉冲多普勒雷达工作比10-2 ~10-1量级 连续波雷达工作比100% 总功率:发射机输出功率与输入功率之比 主振放大式发射机特别注意改善输出级效率 信号形式: 信号形式由雷达体制决定 常规脉冲雷达为简单脉冲波形,特殊体制雷达为复杂调制波形 t r av P T P τ=r r T F D ττ= =
工程测量原理与方法
第二讲工程测量学的原理、方法和技术 Theory,way,technology of engineering surveying 主要内容:观测量和测量定位原理、地面测量方法和技术、专用测量方法与技术、空间测量方法与技术。 难点:专用测量方法与技术、空间测量方法与技术2.1 概述 工程测量学与大地测量学、摄影测量与遥感学、地图制图学海洋测绘和测绘仪器学一样,是现代测绘学的分支学科。它即遵循测绘学的基本原理、方法和技术,又为了解决工程和工程建设中的测绘技术问题,工程测量学也形成了具有自身特点的原理、方法和技术,以及各种专用和通用的测量仪器。2.2 观测量和测量定位原理2.2.1 工程测量中的观测量工程测量的实质是: 1> 通过各种观测量确定客观物体上的特征点在某一坐标系下的三维坐标(平面位置 与高程即X, 丫,H)及其随时间的变化。 2>根据设计坐标(X, Y, Z)通过各种观测量将设计实体放样到实地。观测量: 1> 角度(方向)观测量角度观测量又分水平角和垂直角(高度角)或天顶距(观 测方向线与铅垂线间的夹角) 所用仪器:经纬仪、全站仪2> 距离观测量 两点间的平距、斜距,一点到直线的距离,一点到平面的距离。所用仪器:钢尺、皮尺、铟瓦线尺(叫丈量法或机械法)经纬仪、视距仪(叫视距法或视差法)测距仪、全站仪(叫物理测距法)GPS 全球定位系统(伪距法) 3> 高差观测量两点正常高程之差所用仪器:钢尺、水准仪、测距仪、全站仪、液体静力水准测量(用于工程变形测量) 4> 方位角观测量地面上某一方向线与真北方向的夹角(真方位角)所用仪器:陀螺 仪(用于矿山、铁路与公路隧道及城市地铁隧道中) 2.2.2 工程测量中测量定位原理工程测量的任务:测量、测设或放样工程测量中所采用的坐标系统:1> 平面—高斯—克吕格平面直角坐标系或独立平面直角坐标系2> 高程—正常高系统 测量定位原理: 1> 高差与高程的测定不论进行水准测量还是利用水准仪进行高程放样,均是利用水平视线测定两
光学测量原理与技术
第一章、对准、调焦 ?对准、调焦的定义、目的; 1.对准又称横向对准,是指一个对准目标与比较标志在垂直瞄准轴方向像的重合或置 中。目的:瞄准目标(打靶);精确定位、测量某些物理量(长度、角度度量)。 2、调焦又称纵向对准,是指一个目标像与比较标志在瞄准轴方向的重合。 目的: --使目标与基准标志位于垂直于瞄准轴方向的同一个面上,也就是使二者位于同一空间深度; --使物体(目标)成像清晰; --确定物面或其共轭像面的位置——定焦。 人眼调焦的方法及其误差构成; 清晰度法:以目标和标志同样清晰为准则; 消视差法:眼睛在垂直视轴方向上左右摆动,以看不出目标和标志有相对横移为准则。可将纵向调焦转变为横向对准。 清晰度法误差源:几何焦深、物理焦深; 消视差法误差源:人眼对准误差; 几何焦深:人眼观察目标时,目标像不一定能准确落在视网膜上。但只要目标上一点在视网膜上生成的弥散斑直径小于眼睛的分辨极限,人眼仍会把该弥散斑认为是一个点,即认为成像清晰。由此所带来的调焦误差,称为几何焦深。 物理焦深:光波因眼瞳发生衍射,即使假定为理想成像,视网膜上的像点也不再是一个几何点,而是一个艾里斑。若物点沿轴向移动Δl后,眼瞳面上产生的波像差小于λ/K(常取K=6),此时人眼仍分辨不出视网膜上的衍射图像有什么变化。 (清晰度)人眼调焦扩展不确定度: (消视差法)人眼调焦扩展不确定度: 人眼摆动距离为b ?对准误差、调焦误差的表示方法; 对准:人眼、望远系统用张角表示;显微系统用物方垂轴偏离量表示; 调焦:人眼、望远系统用视度表示;显微系统用目标与标志轴向间距表示 ?常用的对准方式; 22 22 122 8 e e e D KD αλ φφφ ???? ''' =+=+ ? ? ???? 121 11e e l l D α φ'=-= 22 21 118 e l l KD λ φ'=-= e b δ φ'=
万能角度尺原理及使用说明
万能角度尺 科技名词定义 中文名称: 万能角度尺 英文名称: universal bevel protractor 定义: 用游标读数,可测任意角度的量尺。 。 国家标准:GB/T6315-2008游标、带表和数显万能角度尺 目录 简介 (1) 原理 (2) 结构说明 (2) 万能角度尺的使用方法 (3) 万能角度尺的读数方法 (6) 简介 万能角度尺又被称为角度规、游标角度尺和万能量角器,它是利用游标读数原理来直接测量工件角或进行划线的一种角度量具。 适用于机械加工中的内、外角度测量,可测0°-320° 外角及40°-130° 内角。
原理 万能角度尺是用来测量工件内、外角度的量具,其结构如图所示。 万能角度尺的读数机构是根据游标原理制成的。主尺刻线每格为1°。游标的刻线是取主尺的29°等分为30格,因此游标刻线角格为29°/30,即主尺与游标一格的差值为,也就是说万能角度尺读数准确度为2’。其读数方法与游标卡尺完全相同。 结构说明 测量时应先校准零位,万能角度尺的零位,是当角尺与直尺均装上,而角尺的底边及基尺与直尺无间隙接触,此时主尺与游标的“0”线对准。调整好零位后,通过改变基尺、角尺、直尺的相互位置可测试0-320°范围内的任意角。 应用万能角度尺测量工件时,要根据所测角度适当组合量尺, 万能角度尺的结构:它由尺身、90°角尺、游标、制动器、基尺、直尺、卡块等组成。 万能角度尺的测量范围 游标万能角度尺有Ⅰ型Ⅱ型两种,其测量范围分别为0°~320°和0°~360°。 图1 Ⅰ型
图2 Ⅱ型 万能角度尺的使用方法 测量时,根据产品被测部位的情况,先调整好角尺或直尺的位置,用卡块上的螺钉把它们紧固住,再来调整基尺测量面与其它有关测量面之间的夹角。这时,要先松开制动头上的螺母,移动主尺作粗调整,然后再转动扇形板背面的微动装置作细调整,直到两个测量面与被测表面密切贴合为止。然后拧紧制动器上的螺母,把角度尺取下来进行读数。 1.测量0°~50°之间角度 角尺和直尺全都装上,产品的被测部位放在基尺各直尺的测量面之间进行测量。 图3 测量0°~50°之间角度
雷达测速与测距 ()
雷达测速与测距 GZH 2016/3/29 系统流程图 模块分析 1 脉冲压缩 1.1 原理分析 雷达的基本功能是利用目标对电磁波的散射而发现目标,并测定目标的空 间位置。雷达分辨力是雷达的主要性能参数之一。所谓雷达分辨力是指在各 种目标环境下区分两个或两个以上的邻近目标的能力。一般说来目标距离不 同、方位角不同、高度不同以及速度不同等因素都可用来分辨目标,而与信 号波形紧密联系的则是距离分辨力和速度(径向)分辨力。两个目标在同一角 度但处在不同距离上,其最小可区分的距离称为距离分辨力,雷达的距离分 辨力取决于信号带宽。对于给定的雷达系统,可达到的距离分辨力为 (1.1) 其中c为光速,为发射波形带宽。 雷达的速度分辨率可用速度分辨常数表征,信号在时域上的持续宽度越大, 在频域上的分辨率能力就越好,即速度分辨率越好。 对于简单的脉冲雷达,,此处,为发射脉冲宽度。因此,对 于简单的脉冲雷达系统,将有 (1.2)在普通脉冲雷达中,由于信号的时宽带宽积为一常数(约为1),因此不 能兼顾距离分辨力和速度分辨力两项指标。 雷达对目标进行连续观测的空域叫做雷达的探测范围,也是雷达的重要 性能数,它决定于雷达的最小可测距离和最大作用距离,仰角和方位角的探 测范围。而发射功率的大小影响作用距离,功率大则作用距离大。发射功率 分脉冲功率和平均功率。雷达在发射脉冲信号期间 内所输出的功率称脉冲功 率,用Pt表示;平均功率是指一个重复周期Tr内发射机输出功率的平均值, 用Pav表示。它们的关系为 (1.3) 脉冲压缩(PC)雷达体制在雷达脉冲峰值受限的情况下,通过发射宽脉 冲而获得高的发能量,以保证足够的最大作用距离,而在接收时则采用相应
雷达测距、测角、测速基本原理
雷达测距、测角、测速基本原理 目标在空间的位置可以用多种坐标系表示。最常见的是直角坐标系,空间任一点目标P 的位段可用x,y,z三个坐标值来确定。在雷达应用中,测定目标坐标常采用极(球)坐标系统. 目标的斜距R为雷达到目标的直线距离OP;方位角a为目标的斜距R在水平面上的投影OB与某一起始方向(一般是正北方向)在水平面上的夹角;仰角B为斜距R与它在水平面上的投影OB在沿垂直面上的夹角,有时也称为倾角或者高低角。 如果需要知道目标的高度和水平距离,那么利用圆柱坐标系就比较方便。在这种坐标系中.目标的位由三个坐标来确定:水平距离D;方位角。;高度H, 球坐标系与圆柱坐标系之间的关系如下: D=RcosB H=RsinB a=a 上述这些关系仅在目标的距离不太远时是正确的;当距离较远时,由于地面的弯曲,必须作适当的修正。 现以典型的脉冲雷达为例来说明雷达测量的基本工作原理。它由发射机、发射天线、接收机和接收天线组成。发射电磁波中一部分能量照射到雷达目标上,在各个方向上产生二次散射。雷达接收天线收集散射回来的能量,并送至接收机对回波信号进行处理,从而发现目标,提取目标位置、速度等信息。实际脉冲雷达的发射和接收通常共用一个天线,以简化结构.减小体积和重量。 脉冲雷达采用的发射波形通常是高频脉冲串.它是由窄脉冲调制正弦载波产生的,调制脉冲的形状一般为矩形,也可采用其他形状。目标与雷达的斜距由电磁波往返于目标与雷达之间的时间来确定;目标的角位置由二次散射波前的方向来确定;当目标与雷达有相对运动时,雷达所接收到的二次散射波的载波频率会发生偏移,测量载频偏移就可以求出目标的相对速度,并且可以从固定目标中区别出运动目标来。
1测量技术讲解
1H412010测量技术 前言 本节的重点是:机电工程项目工程测量技术、起重技术、焊接技术,也是机电工程一级建造师必备的基本专业技术知识。 工程测量是指遵照施工图纸的要求,使用精密的测量仪器和工具,将工程项目的建(构)筑物、机电工程工艺生产线上的设备、系统管线等的坐标位置、几何形状、相关数据等准确地测量、放样到实地,并在施工全过程中进行测量控制。 本目重点是: 机电工程测量的方法; 测量的要求; 测量仪器的应用。 1H412011测量的方法 工程测量是按照设计和施工的要求将设计的建筑物、构筑物的平面位置和高程在地面上标定出来,作为施工的依据,并在施工过程中进行一系列的测量工作,以衔接和指导各工序之间的施工。 本条主要知识点是: 工程测量的目的和内容;工程测量的特点、工程测量的原则和要求;工程测量的基本原理及方法;工程测量的程序;竣工图的绘制;常见的机电工程中的测量。 一、工程测量的目的和内容 1.工程测量的目的 (1)工程测量的首要工作也是要做好控制点布测。工程测量包括对建(构)筑物施工放样、建(构)筑物变形监测、工程竣工测量等,以保证将设计的建(构)筑物位置正确地测设到地面上,作为施工的依据。 (2)工程测量贯穿于整个施工过程中。从场地平整、建筑物定位、基础施工、建筑物构件安装等,都需要进行工程测量,以使建筑物、构筑物各部分的尺寸、位置符合设计要求。 2.主要内容 (1)建立施工控制网。 (2)建筑物、构筑物的详细测设。 (3)检查、验收。每道施工工序完工之后,都要通过测量检查工程各部位的实际位置及高程是否与设计要求相符合。 (4)变形观测。随着施工的进展,测定建筑物在平面和高程方面产生的位移和沉降,收集整理各种变形资料,作为鉴定工程质量和验证工程设计、施工是否合理的依据。 二、工程测量的特点 与测图工作相比,具有如下特点: 1.目的不同。测图工作是将地面上的地物、地貌测绘到图纸上,而工程测量是将图纸上设计的建筑物或构筑物测设到实地。 2.精度要求不同。工程测量的精度要求取决于工程的性质、规模、材料、施工方法等因素。 一般高层建筑物的工程测量精度要求高于低层建筑物的工程测量精度,钢结构工程测量精度要求高于钢筋混凝土结构的工程测量精度,装配式建筑物的工程测量精度要求高于非装配式建筑物的工程测量精度。 此外,由于建筑物、构筑物的各部位相对位置关系的精度要求较高,因而工程
激光雷达测距测速原理说课讲解
激光雷达测距测速原 理
精品文档 收集于网络,如有侵权请联系管理员删除 激光雷达测距测速原理 1. 激光雷达通用方程 激光雷达方程用来表示一定条件下,激光雷达回波信号的功率,其形式如下: r P 为回波信号功率,t P 为激光雷达发射功率,K 是发射光束的分布函数,12a a T T 分别是激光雷达发射系统到目标和目标到接收系统的大气透过率,t r ηη分别是发射系统和接收系统的透过率,t θ为发射激光的发散角,12R R 分别是发射系统到目标和目标到接收系统的距离,Γ为目标的雷达截面,r D 为接收孔径。 方程作用:激光雷达方程可以在研发激光雷达初期确定激光雷达的性能。其次,激光雷达方程提供了回波信号与被探测物的光学性质之间的函数关系,因此可以通过激光雷达探测的回波信号,通过求解激光雷达方程获得有关大气性质的信息。 2. 激光雷达测距基本原理 2.1 脉冲法 脉冲激光雷达测距的基本原理是,在测距点向被测目标发射一束短而强的激光脉冲,激光脉冲到达目标后会反射回一部分被光功能接收器接收。假设目标距离为L ,激光脉冲往返的时间间隔是t ,光速为c ,那么测距公式为L=tc/2。 时间间隔t 的确定是测距的关键,实际的脉冲激光雷达利用时钟晶体振荡器和脉冲计数器来确定时间t ,时钟晶体振荡器用于产生固定频率的电脉冲震荡 ?T=1/f ,脉冲计数器的作用就是对晶体振荡器产生的电脉冲计数N 。如图所示,信息脉冲为发射脉冲,整形脉冲为回波脉冲,从发射脉冲开始,晶振产生脉冲与计数器开始计数时间上是同步触发的。因此时间间隔t=N ?T 。由此可得出L=NC/2f 。 图1脉冲激光测距原理图 2.2 相位法
角度测量原理
角度测量原理 内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。 重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法; 难点:光学经纬仪的检验与校正。 § 3.1 角度测量原理 角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。 一、水平角定义 从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。其范围:顺时针0°~360°。 二、竖直角定义 在同一竖直面内,目标视线与水平线的夹角,称为竖直角。其范围在0°~±90°之间。如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite ) 经纬仪是测量角度的仪器。按其精度分,有DJ6 、DJ2 两种。表示一测回方向观测中误差分别为6"、2"。 一、DJ6 光学经纬仪的构造 DJ6 光学经纬仪图 1、照准部(alidade) 2、水平度盘(horizontal circle) 3、基座(tribrach) 二、J6的读数方法
1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。如图,水平度盘读数为:73°04ˊ24"。 2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。 三、J2 光学经纬仪的构造 如图与J6 相比,增加了: 1、测微轮——用于读数时,对径分划线影像符合。 2、换像手轮——用于水平读数和竖直读数间的互换。 3、竖直读盘反光镜——竖直读数时反光。 四、J2 的读数方法 一般采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。 五、经纬仪的安置 内容及要求:
毫米波雷达测距原理
毫米波雷达测距原理(77GHz FMCW) 本章摘要:介绍什么是调频连续波(FMCW),它是如何进行测距的,测距分辨率分析,测距范围分析。 调频连续波测距的基本原理: 1、发射波TX为高频连续波,其频率随时间按一定规律规律变化。 2、发射波TX遇到物体之后反射,接收器接收到反射波RX。 3、信号的发射到接收,产生一定的时间间隔 t。由这个时间间隔,得到频率差值信号IF signal。 4、对频率差值信号,进行FFT变换,得到对应的频谱。频谱的峰值处对应的频率 f 和距离 d 具有对应关系,进而得到距离d。 5、测距分辨率的分析。 6、测距范围的分析。 上面只是调频连续波测距的整体逻辑,不太清楚没关系,下面逐步进行详细的分析: 一、调频连续波的发射信号TX 发射波为高频连续波,其频率随时间规律变化。一般为锯齿形,三角形,这里介绍锯齿形,其基本组成称为chirp,下面为其性质。 二、接收信号RX
1、合成器生成chirp信号。 2、发射天线发射信号TX。 3、接收天线接收反射回来的信号RX。 4、经过mixer,得到发射信号TX与接收信号RX之间的差值信号IF signal。过程如下: 三、时间差值 t,以及差值信号 IF signal ?由于雷达到障碍物之间有一定的距离,从信号发射,到返回接收,有一定的距离,这个距离就产生了接收时间差值t =2d/c,其中d 为雷达到障碍物的距离,c 为光速。 ?将发射/接收信号放在一个图里面,就得到如下的图。从图中可以看出,接收信号与发射信号一样,只是延迟了时间 t。 ?它俩经过mixer得到差值信号 IF signal ,其频率为 f= s*t,s为chirp的斜率,s = B/Tc。 ?由 t =2d/c,f= s*t,s = B/Tc 可以得出障碍物的距离 d 与 IF signal 信号频率 f 之间的关系式: d = f * c * Tc / (2B)。所以分析出了频率f,就可以得到距离d。 四、对IF signal 进行FFT变换,得到对应的频率 f,然后求得距离d
雷达测速原理简介及系统应用
测速雷达原理 雷达原理简介 首先,大家必须先了解雷达的基本原理,因为雷达仍是当前用来检测移动物体最普遍的方法。雷达英文为RADAR ,是Radio Detection And Ranging 的缩写。所有利用雷达波来检测移动物体速度的原理,其理论基础皆源自于「多普勒效应」,其应该也是一般常见的多普勒雷达(Doppler Radar),此原理是在19世纪一位澳地利物理学家所发现的物理现象,后来世人为了纪念他的贡献,就以他的名字来为该原理命名。 多普勒的理论基础为时间。波是由频率及振幅所构成,而无线电波是随着波而前进的。当无线电波在行进的过程中,碰到物体时,该无线电波会被反弹,而且其反弹回来的波,其频率及振幅都会随着所碰到的物体的移动状态而改变。若无线电波所碰到的物体是固定不动的,那么所反弹回来的无线电波其频率是不会改变的。然而,若物体是朝着无线电线发射的方向前进时,此时所反弹回来的无线电波会被压缩,因此该电波的率频会随之增加;反之,若物体是朝着远离无线电波方向行进时,则反弹回来的无线电波,其频率则会随之减小。下图为多普勒雷达(Doppler Radar)的基本原理图标: CS R-28测速雷达所应用的原理,就是可以检测到发射出去的无线电波,与遇到运动物体反弹回来的无线电波其间的频率变化及I 通道和Q 通道的相位变化。由频率的变化,依特定的比例关系,而计算出该波所碰撞到物体的速度。由I 通道和Q 通道之间的相位关系,计算判断运动物体是朝着无线电波的方向前进或朝其反方向前进。 根据多普勒原理,由于雷达发射和接受共用一个天线,且运动目标的运动方向与天线法线方向相一致,运动目标的多普勒频率fd 符合下列关系式。 (1) f d = 2V r f t C
经纬仪原理及角度测量方法
经纬仪原理及角度测量方法
经纬仪原理及角度测量方法 内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。 重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法; 难点:光学经纬仪的检验与校正。 § 3.1 角度测量原理 角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。 一、水平角定义 从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。其范围:顺时针0°~360°。 二、竖直角定义 在同一竖直面内,目标视线与水平线的夹角,称为竖直角。其范围在0°~±90°之间。如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite ) 经纬仪是测量角度的仪器。按其精度分,有DJ6 、DJ2 两种。表示一测回方向观测中误差分别为6"、2"。 一、DJ6 光学经纬仪的构造 DJ6 光学经纬仪图 1、照准部(alidade) 2、水平度盘(horizontal circle) 3、基座(tribrach) 二、J6的读数方法 1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。如图,水平度盘读数为:73°04ˊ24"。 2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。
最新西南科技大学雷达原理试卷及答案
卷一 一、填空题(每空2分,共20分) 1、以典型单基地脉冲雷达为例,雷达主要由天线、发射机、接收机、信号处理机和终端设备等组成。 2、在满足直视距离条件下,如果保持其他条件不变(其中天线有效面积不变),将雷达发射信号的频率从1 GHz提高到4GHz,则雷达作用距离是原来的2倍。 3、雷达发射机按产生的射频信号的方式,分为单级振荡式发射机和主振放大式发射机两类。 4、某雷达脉冲宽度为1μs,脉冲重复周期为1ms,发射功率为100KW,平均功率为100 W. 5、脉冲多普勒雷达的脉冲重复频率为=1000Hz,对动目标进行检测。其多普勒频率为,能够出现盲速的多普勒频率等于1000Hz 。 6、雷达测角的方法分为两大类,即振幅法和相位法。 7、双基雷达是发射机和接收机分置在不同位置的雷达。 8、已知雷达波长为λ,目标的径向速度为v,那么回波信号的多普勒频移= 。 二、单选题(每题2分,共30分) 1、以下哪个部件最不可能属于雷达接收机(C) A、低噪声高频放大器 B、混频器 C、脉冲调制器 D、信号处理机 2、雷达测距原理是利用电波的以下特性(D) A、在空间介质中匀速传播 B、在空间介质中直线传播 C、碰到目标具有良好的反射性 D、以上都是 3、雷达之所以能够发射机和接收机共用一个雷达天线,是因为(C) A、雷达天线是定向天线 B、雷达天线是波导天线 C、首发转换开关的作用 D、雷达天线用波导传输能量 4、雷达射频脉冲与固定目标回波相比(D) A、二者功率相同,频率相同 B、二者功率不同,频率不同 A、二者功率相同,频率不同 B、二者功率不同,频率相同 5、雷达定时器产生的脉冲是发射机产生的脉冲是(A) A、触发脉冲,射频脉冲 B、发射脉冲,视频脉冲 C、触发脉冲,视频脉冲 D、发射脉冲,触发脉冲 6、雷达发射脉冲的持续时间取决于(C) A、延时线的调整 B、3分钟延时电路的调整 C、调制脉冲的宽度 D、方波宽度的调整