车载激光与单目线阵相机的数据融合
三维激光扫描分类及工作操作规范
三维激光扫描分类及工作 操作规范 Revised by Hanlin on 10 January 2021
一、地面激光扫描系统 1、概述 地面激光扫描仪系统类似于传统测量中的全站仪,它由一个激光扫描仪和一个内置或外置的数码相机,以及软件控制系统组成。二者的不同之处在于激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。这些点云数据可以直接用来进行三维建模,而数码相机的功能就是提供对应模型的纹理信息。 2、工作原理 三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算日标点P与扫描仪距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。三维激光扫描测量一般为仪器自定义坐标系。X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。获得P的坐标。进而转 换成绝对坐标系中的三维空间位置坐标或三维模型。 3、作业流程 整个系统由地面三维激光扫描仪、数码相机、后处理软件、电源以及附属设备构成,它采用非接触式高速激光测量方式,获取地形或者复杂物体的几何图形数据和影像数据。最终由后处理软件对采集的点云数据和影像数据进行处理转换成绝对坐标系中的空间位置坐标或模型,以多种不同的格式输出,满足空间信息数据库的数据源和不同应用的需要。(1)、数据获取 利用软件平台控制三维激光扫描仪对特定的实体和反射参照点进行扫描,尽可能多的获取实体相关信息。三维激光扫描仪最终获取的是空间实体的几何位置信息,点云的发射密度值,以及内置或外置相机获取的影像信息。这些原始数据一并存储在特定的工程文件
车载激光扫描技术研究与应用现状
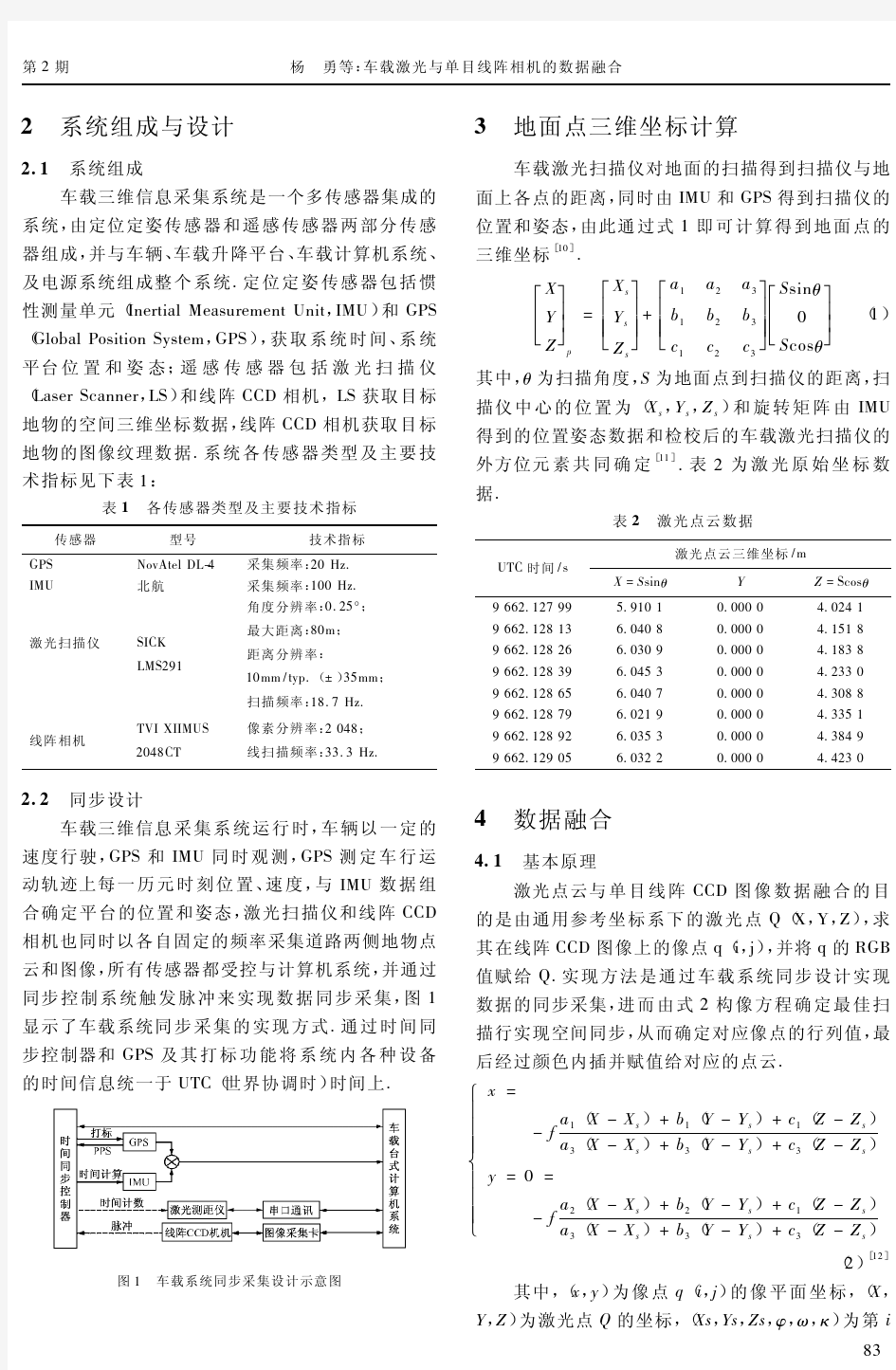
信息技术 摘要:近年来,随着三维激光扫描技术的不断发展和完善,车载激光扫描技术的应用越来越广泛。本文针对车载激光扫描技术,概述了该技术的工作原理,系统组成,处理流程,工程应用以及今后的发展。 关键词:车载激光扫描系统应用现状 0引言 三维激光扫描技术是测绘领域继GPS技术之后的一次技术革命,又被称为实景复制技术。它突破了传统的单点测量方法,具有快速,非接触式,渗透,实时,动态的,主动的,高密度,高精度,数字化,自动化等特点。三维激光扫描技术可以获取高精度高分辨率的数字地形模型,因为它能够提供扫描物体表面的三维点云数据。按照载体的不同,三维激光扫描系统又可分为机载、车载、地面和手持型几类。在许多环境下,车载激光扫描系统就可以克服利用地面激光测量系统扫描而造成的费时费力的问题,例如对大范围的区域进行制图。 1车载三维激光扫描系统的组成 在普通车的顶部的行李架上稳固连接车载三维激光扫描系统的传感器部分,或者直接在车顶直接加装一个定制部件的过渡板。激光传感器头、数码相机、IMU与GPS天线的姿态或位置可以通过车顶支架调整。传感器头与导 航设备间的相对姿态和位置关系靠高强度的结构保证。 2车载三维激光扫描系统的工作原理 车载激光扫描系统是将激光扫描仪与GPS、IMU联合使用。在测量的过程中,GPS测量记录道路两侧目标地物在世界坐标系的位置,激光扫描仪则负责记录影像纹理、形状距离,另外,还需要记录测量车行进的方向角以及行进过程中的加速度,可以计算任一时刻在每个方向上的速度,为IMU提供一些参数,从而可以采集到车载平台在任意时刻下的行进状态。同时,GPS会实时记录下测量车在世界坐标系下的坐标位置,这一位置为绝对位置,激光扫描仪会实时记录下测量车到道路两侧目标建筑物的相对距离和测量的角度,这个距离是激光脉冲发射点到目标地物表面的距离,根据几何关系,可以很容易的计算得出任一时刻,激光扫描脉冲发射点到目标建筑物的距离。利用空间和时间上的检校信息,就可以整合得到目标地物表面在世界坐标系下的绝对坐标,从而实现在没有任何参考点的情况下,动态、实时地获取道路两侧目标地物表面的三维信息的功能。 3车载三维激光扫描系统的研究现状 近年来迅速发展起来三维激光扫描技术,这一高新技术已经有许多西方发达国家将它应用于对敌观测系统和快速获取特定目标的立体模型。目前,许多国际研究机构都投入了大量的人力,物力和财力,进行相关技术的研究和开发。详细情况见表1。 4车载三维激光扫描系统的应用 现如今,车载三维激光扫描系统已经被越来越多的应用到各行各业。它可以完成大区域地形图测量;交通部门可以利用它进行事故的勘测,规划部门可以进行森林的计测,军事部门进行实战电脑模拟,建筑部门还可以进行各项建筑的实景建模。在2008年4月,在希腊从雅典到克林斯曼对一条长达120km的公路进行了详尽的测量工作。这项工程是在CAD中将主要的地物特征重建,用来扩建一条新的高速公路。整个过程中以每小时50km的车速,测量了9.8亿个点,仅仅花费了3个小时。 同时间段,英国的Leicester利用车载三维激光扫描系统将很多有科学价值的历史建筑物区域建模并完成归档,耗费的时间不长,但是达到了很高的精度。 国内某矿区,利用三维激光扫描仪制作了详实的矿区三维模型,结合地质、水文、采矿等数据,可用于开采方量计算、开采设计、回填方案制定、稳定性分析等矿山安全生产的多个方面。先进的法如三维激光扫描仪可在短期内完成大量的数据采集工作,结合强大的矿山后处理方案,是建设三维数字化矿山的必备工具。 5车载三维激光扫描系统的发展 车载三维激光扫描系统作为测绘科学的领先产品,是一种直接主动式测量方法,受天气条件的影响少,作业安全,作业周期快,易于更新,时效性强,而且,在数据处理后,所有带有3D坐标的点云都可以被输出到CAD的环境下进行进一步的数据处理和加工。从现在的形势来看,车载激光扫描系统基本涵盖测绘的各个领域。但是其自身还存在很多不足,如:系统获得的数据具有分布不规律,坐标不连续;用于普通地形测量的系统所发射的激光脉冲很容易被水吸收而很难产生发射光,因此,该系统难以确定水系的边界;到目前为止,还没有一套通用的作业规范和流程;目前LiDAR系统的价格昂贵,也一定程度上限制了该系统的普 车载激光扫描技术研究与应用现状 胡雨佳(辽宁地质工程职业学院) 名称 GPSVan VISAT GIMTM KISS GI-EYE CDSS WUMMS LD2000 LaserScan-nerMMS DDTI 开发单位 OhioState University University ofCalgary NAVSYS MunichU- niversityof theFederal Military NAVSYS Aachen大地 测量研究所 武汉测绘科 技大学 立得公司 武汉大学 美国数字数 据技术公司 平台 汽车、 火车 汽车 卡车 汽车 汽车 汽车 汽车 汽车 汽车 汽车 影像传感器 GPS,陀螺,里 程计,IMU 单色CCD,彩 色摄像机 CCD,摄像机 SVHS,单色 CCD,录音设 备 CCD 单色CCD CCD,激光扫 描仪 彩色CCD 激光扫描仪 触摸屏,录音 设备 参考文献 Goad,1991 Novak,1991 Schwarz,1993 EI-Sheimy,1999 Goetseeand Brown,1984 Caspary,1995 Brown,1998 Benningand Aussems,1998 LI等,1999 LI等,2001 LI等,2001 DDTI(网站)表1主要移动测图系统 301
海量车载激光扫描点云数据的快速可视化方法
海量车载激光扫描点云数据的快速可视化方法 激光扫描系统能够直接获取被测目标表面的三维空间坐标,具有采样密度高、点云分 布密集等特点,正逐渐成为三维空间信息快速获取的主要手段之一,被广泛应用于文物保护、三维重建、数字地面模型生产、城市规划等领域[1]。现代车载激光扫描系统,通常 安装多个激光扫描头采集三维点云数据,如Optech公司的LYNX系统,Riegl公司的VMX-450系统。车载激光扫描系统沿着某一轨迹采集数据,多个高频采样激光头数据相互叠加,产生海量三维点云数据,其数据量随着轨迹的延长而线性增加。例如,VMX-450系统在约 一个小时内,可获取40 km左右长度的点云数据,数据量高达1 TB。对于车载激光扫描系统采集的海量三维点云数据,单在数据量方面即对后续数据处理(如点云滤波、分割,目 标识别,三维重建和可视化等)带来巨大的挑战。为实现海量点云数据的空间分析及可视化,需要实时、高效地完成点云数据的调度和查询工作。空间数据的调度,关键在于数据 的索引与检索,索引的性能优劣直接影响到系统的效率和分析能力。因此,如何建立合理 的空间索引机制,是解决海量空间数据组织和快速调度的关键问题。许多标志性索引方法 已被广泛应用于空间数据的检索、查询、存储以及管理,如四叉树[2]、R树[3, 4]、R* 树[5]和八叉树[6]等。 在地理信息系统中,支持二维空间数据的索引方法已非常成熟。但是,随着三维点云 数据的广泛应用,迫切需要在虚拟地理环境下可视化全部三维点云数据。在三维点云数据 可用性不断增强的驱动下,出现了一些具有可视化和三维点云数据管理功能的商业软件[7, 8]。然而,Quick Terrain Reader、Point Tools等商业点云处理软件对载入点云数据量有严格限制,不支持车载海量激光点云数据的实时三维可视化,从而引发了完善三维 激光点云数据空间索引方法的热潮。 R树或R*树的每个子块包含一个对象,这些子块可以彼此重叠。文献[9]提出利用三 维 R 树结构管理虚拟环境下的三维建筑物。文献[10]提出使用三维 R 树结构快速索引激 光点云数据。但是,如何有效解决R 树子块重叠是三维点云数据管理尚未解决的问题。四叉树索引是一种基于树的空间索引,它按照一定的规则,将已知范围的空间递归地均分成 4个部分,直到每个子块满足条件为止[11]。文献[12]提出了一种基于四叉树的三维点云 渲染方法,此方法在假设连续点属于同一条扫描线的前提下,只存储每个叶子节点内的点 的位置以节省存储空间。但是,这种方法无法对多扫描仪获取的无序点云建立索引。八叉 树作为四叉树的3D扩展亦被广泛应用于三维数据索引。文献[13]提出了基于八叉树的三 维点云数据的多尺度可视化方法。文献[14]提出了一种开源的八叉树点云数据索引标准数 据格式,并测试其在海量点云特征提取算法方面的适用性。文献[15]通过哈希表数据结构 优化八叉树结构,实现三维点云数据的快速检索。文献[16]设计了一种基于外存的多分辨 率数据结构,实现了海量点云数据的实时可视化与交互编辑。一般情况下,基于八叉树 的树结构比较适合处理三维点云数据,并且该方法有现行开源标准数据格式[14]。但是, 对车载激光扫描系统采集的三维数据使用八叉树索引具有分布不均等缺点,会出现大量空 的叶节点。这直接造成了点云存储空间的低利用率,并且增加了空间数据查询的复杂度。 相比四叉树结构,八叉树结构需要更多的存储空间,更难实现。快速检索算法通常需要耗
机载和车载式激光扫描技术
机载和车载式激光扫描技术 2011-03-04 16:26:18 作者:admin来源:浏览次数: 为将基础设计方案作为设计规划的基础,用于地区通道巴苏木的改建和扩建工程,需要借助直升飞机和车辆上安装的测量系统来提取存档数据,并用CARD/1进行处理,准备用于设计。测量控制中要遵守RAS测量规范中对于这一测量方法的准确度要求。同样这一测量方式的安全性、便捷性和节约成本的特点都为您的设计拓宽了发展空间。 在交通车辆范围内对存档数据进行提取,这种操作模式对测量提出了特殊的挑战和要求。需要采取安全防护和隔离措施,才能允许并可能执行测量操作。尽管已提供了安全保护措施,在道路或轨道区域内进行的工作,对于测量小组而言仍然是危险的。而且几乎就不可能做到在毫无干扰的情况下完成一次测量操作。此外,测量作业还经常会对交通运行状况造成影响,特别是在车流量非常大的高速公路或主干线上根本不能长时间封锁车道。下面介绍了一种测量方法,可以允许在道路交通中安全无干扰的完成测量,并同时可为道路设计提取适宜的基础数据,而且还满足了RAS测量规范的准确度要求。 项目 在已设计的OD Bassum的改建和扩建工程中,要将路段的长度从11.64km缩短为10.037km,下萨克森州政府下属的道路施工和交通部门、尼恩堡的业务部(Dipl.-Ing. Bernd Habermann)共同承担了任务,完成工程所需的测量工作,并建立基础设计图作为整体设计的基础资料。这一任务的重要组成部分就是借助车载扫描仪(MLS)和机载扫描仪(ALS),完成一条1.3km长的地图通道的存档数据提取。并基于国家特殊的“编码2000“完成已提取点云的矢量化操作。利用大地坐标控制测量方式,除了可提交证明,而且用这种组合式的数据采集方法也可达到一定的准确度要求,并且允许在道路设计方案中使用扫描数据。 机载扫描技术(ALS) 和车载扫描技术(MLS) 为完成点数据和图片数据的采集,需要利用直升飞机和车辆上安装的测量系统来执行测量。在这一过程中需要用到TopEye (ALS)和Streetmapper (MLS)两种系统。ALS/MLS系统基本上是由下面几种组件构成的: ▲GPS, INS/IMU ▲一台或多台激光扫描仪 ▲照相机和录像机系统 ▲用于MLS的计程仪(Wegmesser) 由于车载系统的照相机图片对于高精度要求的项目而言,通常都只能用于识别对象。并且由于行驶速度,要求仪器必须要达到相当高的数据采集频率。因此照相机系统通常配备的是中等的分辨率(2-4百万分辨率)。相对而言,飞机上装配的激光扫描系统就配备了一台高分辨率并且已校准过的照相机(Rollei AIC,39百万分辨率)。 这两种系统都可在最短的时间内为长路段设施准确的提取存档数据。由于车载式测量系统较高的扫描频率,并且测量车是与行驶中的车流“一同行驶“的,因此避免了对交通状况造成影响。 飞行 为了从空中提取尽可能高分辨率的航拍图,并保存激光扫描数据,飞行过程中只能保持到地面150m的高度。在两条平行线路上方完成的飞行测量保证了为以后的分析操作准备一个足够宽的走廊带。 对于航拍数据可以达到下面的分辨率: 航拍图:地表分辨率2cm 点云:大约为每平方米50个测量点 行驶 测量车辆可沿两个行驶方向完成对每条行驶轨迹的测量。数据采集速度受交通状况影响,在30km/h到50km/h之间。基于较低的速度进行统计,两台扫描仪(测量频率为200000点/秒)采集的点密度为每平方米3000个测量点。 两种照相机系统都是沿行驶方向架设的。在行驶方向上还可增加一台录像机,记录整个过程。 对测量数据的分析 在结束了飞行和行驶过程后,测量数据就已准备完毕。然后需要将激光扫描数据转换到本地的坐标系中,并自动进行分类。对分类后的结果进行一次可视的检查,或者进行一次手动的后续编辑,都可保障已准备的点的数据质量。两种扫描系统的激光扫描数据可组合使用,因此在后续的分析过程中,可使用一个点
面向车载激光扫描点云快速分类的点云特征图像生成方法_杨必胜
第39卷 第5期测 绘 学 报 Vol .39,No .5 2010年10月 Acta Geodaetic a et Cartogra phica Sinic a Oct .,2010 文章编号:1001-1595(2010)05-0540-06 面向车载激光扫描点云快速分类的点云特征图像生成方法 杨必胜1,2,魏 征1,2,李清泉1,2,毛庆洲1, 2 1.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079; 2.武汉大学时空数据智能获取技术与应用教育 部工程研究中心,湖北武汉430079 A Classification -oriented Method of Feature Image Generation for Vehicle -borne Laser Scanning Point Clouds YANG Bisheng 1,2,W EI Zheng 1,2,LI Qingquan 1,2,MAO Qing zhou 1,2 1.State Key Laboratory of Information Engineering in Survey ing ,Ma pping and R emote Sensing ,Wuha n University ,Wuhan 430079,China ; 2.Engineering Resea rch Center for Spatio -temporal Da ta Smart Acquisit ion and Applica tion ,Ministry of Educa tion of China ,W uhan University ,W uha n 430079,China Abstract :An efficient method of feature image gener at ion of point clouds to automatical ly classify dense point cl ouds into d ifferent categories is proposed ,such as terra in points ,build ing points .The method first uses pl anar proj ect ion to sort points into d ifferent grids ,then calculates the weight s and fe ature val ues of grids according to the dist ribut ion of l aser scanning points ,and finall y generates the fe ature image of point clouds .Thus ,the proposed method adopt s contour extr act ion and tr acing me ans to extr act the bound aries and point clouds of man -made o bjects (e .g .bu ildings and trees )in 3D based on the image generated .Exper iments show that the proposed method provides a promising sol ut ion for cl assifying and extract ing man -made objects from vehicl e -borne l aser scanning point clouds . Key words :vehicl e -borne laser scanning ;data cl assi fication ;object extract ion ;image segmentat ion 摘 要:以车载激光点云数据为研究对象,提出一种适合于其快速分类与目标提取的点云特征图像生成方法。首先将扫描区域进行平面规则格网投影,通过分析格网内部点云的空间分布特征(平面距离、高程差异、点密集程度等)确定激光扫描点的定权,从而生成车载激光扫描点云的特征图像。利用生成的点云特征图像,可采用阈值分割、轮廓提取与跟踪等手段提取图像分割的建筑物目标的边界,从而确定边界内部点云数据,实现目标分类与提取。本文以Optech 公司的车载激光扫描数据为试验对象,验证本文提出方法的可行性和实用性。关键词:车载激光扫描;数据分类;目标提取;图像分割中图分类号:P 208 文献标识码:A 基金项目:国家自然科学基金(40871185);教育部新世纪优秀人才支持项目(NCET -07-0643);对地观测技术国家测绘局重点实验室经费;测绘遥感信息工程国家重点实验室专项科研经费 1 引 言 三维扫描技术起源于20世纪80年代,在获取空间信息方面提供了一种全新的技术手段,使传统的单点采集数据变为连续自动获取数据,且激光扫描仪能够直接获取被测目标表面点云的三维空间坐标,具有采样密度高、点云分布密集等特点,其已被广泛地运用于文物保护、三维重建、数字地面模型生产、城市规划等领域。 机载激光扫描数据在DEM 生成、建筑物顶部重建等方面的处理技术已相对成熟[1-6]。但机载激光扫描只能获取地物的顶部数据,缺乏立面的细节信息(如建筑物墙面)。近年来,以车辆为 搭载平台,集成GPS 、INS 、激光扫描仪、CCD 相机等多种传感器,在传感器同步控制的基础上实 现道路以及道路两侧建筑物、树木等地物的表面数据的快速获取已成为国际上研究的热点。国际摄影测量与遥感协会已开设多个专题组从事这方面的研究与讨论。国内外的研究机构与公司也相继推出了一些车载激光扫描系统,如:日本东京大学空间信息科学中心研制的VLMS [7-8],3D Laser Mapping 和IG I 公司合资开发的S treetM apper 系统[9],加拿大Optech 公司的Ly nx 系统[10]。 与机载激光扫描点云数据相比,车载激光扫描点云数据中存在大量Z 平面上的点云数据,如垂直于地面的一些竖直面上的点云数据。因而针
三维激光扫描分类及工作流程
一、地面激光扫描系统 1、概述 地面激光扫描仪系统类似于传统测量中的全站仪,它由一个激光扫描仪和一个置或外置的数码相机,以及软件控制系统组成。二者的不同之处在于激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。这些点云数据可以直接用来进行三维建模,而数码相机的功能就是提供对应模型的纹理信息。 2、工作原理 三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算日标点P与扫描仪距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。三维激光扫描测量一般为仪器自定义坐标系。X轴在横向扫描面,Y轴在横向扫描面与X轴垂直,Z轴与横向扫描面垂直。获得P的坐标。进而转 换成绝对坐标系中的三维空间位置坐标或三维模型。 3、作业流程 整个系统由地面三维激光扫描仪、数码相机、后处理软件、电源以及附属设备构成,它采用非接触式高速激光测量方式,获取地形或者复杂物体的几何图形数据和影像数据。最终由后处理软件对采集的点云数据和影像数据进行处理转换成绝对坐标系中的空间位置坐标或模型,以多种不同的格式输出,满足空间信息数据库的数据源和不同应用的需要。 (1)、数据获取 利用软件平台控制三维激光扫描仪对特定的实体和反射参照点进行扫描,尽可能多的获取实体相关信息。三维激光扫描仪最终获取的是空间实体的几何位置
信息,点云的发射密度值,以及置或外置相机获取的影像信息。这些原始数据一并存储在特定的工程文件中。其中选择的反射参照点都具有高反射特性,它的布设可以根据不同的应用目的和需要选择不同的数量和型号,通常两幅重叠扫描中应有四到五个反射参照点。 (2)、数据处理 1) 数据预处理 数据获取完毕之后的第一步就是对获取的点云数据和影像数据进行预处理,应用过滤算法剔除原始点云中的错误点和含有粗差的点。对点云数据进行识别分类,对扫描获取的图像进行几何纠正。 2)数据拼接匹配 一个完整的实体用一幅扫描往往是不能完整的反映实体信息的,这需要我们在不同的位置对它进行多幅扫描,这样就会引起多幅扫描结果之间的拼接匹配问题。在扫描过程中,扫描仪的方向和位置都是随机、未知的,要实现两幅或多幅扫描的拼接,常规方法式是利用选择公共参照点的办法来实现这个过程。这个过程也叫作间接的地理参照。选取特定的反射参照目标当作地面控制点,利用它的高对比度特性实现扫描影像的定位以及扫描和影像之间的匹配。扫描的同时,采用传统手段,如全站仪测量,获得每幅扫描中控制点的坐标和方位,再进行坐标转 换,计算就可以获得了实体点云数据在统一的绝对坐标系中的坐标。这一系列工作包含着人工参与和计算机的自动处理,是半自动化完成的。 (3)、建模 1) 算法选择
激光雷达点云数据
激光雷达点云数据 LiDAR(Light Detection and Ranging),是激光探测及测距系统的简称,另外也称Laser Radar或LADAR(Laser Detection and Ranging),由激光雷达进行扫描所获取的数据,即为激光雷达点云数据。 激光雷达是用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是激光技术与现代光电探测技术结合的先进探测方式。由发射系统、接收系统、信息处理等部分组成。发射系统是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器、半导体激光器及波长可调谐的固体激光器以及光学扩束单元等组成;接收系统采用望远镜和各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等组合。激光雷达采用脉冲或连续波2种工作方式,探测方法按照探测的原理不同可以分为米散射、瑞利散射、拉曼散射、布里渊散射、荧光、多普勒等激光雷达。 激光雷达的特点: 与普通微波雷达相比,激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多特点,主要有: (1)分辨率高 激光雷达可以获得极高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard也就是说可以分辨3km距离上相距0.3m的两个目标(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。分辨率高,是激光雷达的最显著的优点,其多数应用都是基于此。 (2)隐蔽性好、抗有源干扰能力强 激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此敌方截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率极低;另外,与微波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,适于工作在日益复杂和激烈的信息战环境中。
【CN110013934A】汽车白车身全自动激光扫描喷涂检测一体系统【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910263322.8 (22)申请日 2019.04.02 (71)申请人 清华大学 地址 100084 北京市海淀区清华园 (72)发明人 吴军 王立平 张彬彬 王潇剑 张瑞杰 (74)专利代理机构 北京清亦华知识产权代理事 务所(普通合伙) 11201 代理人 张润 (51)Int.Cl. B05B 13/04(2006.01) B25J 11/00(2006.01) G01B 11/24(2006.01) G01N 21/84(2006.01) (54)发明名称 汽车白车身全自动激光扫描喷涂检测一体 系统 (57)摘要 本发明公开了一种汽车白车身全自动激光 扫描喷涂检测一体系统,包括:三维激光扫描检 测子系统和基于壁挂式六轴喷涂机构的喷涂子 系统,其中,检测子系统包括冗余三平动索机构 和三维激光扫描仪,以在喷涂之前,用于扫描汽 车白车身,生成汽车白车身三维模型和喷涂轨 迹,并且在喷涂之后,检测汽车白车身表面上漆 率和表面质量;喷涂子系统包括第一和第二壁挂 式六轴喷涂混联机构,以根据汽车白车身三维模 型和喷涂轨迹控制第一和第二壁挂式六轴喷涂 混联机构协同作业,对不同类型汽车白车身根据 预设喷涂策略实施不同的喷涂工艺,完成喷涂作 业。该系统具有灵活性好、柔性好的特点,可对不 同汽车白车壳进行自动扫描、 喷涂和检测作业。权利要求书1页 说明书6页 附图2页CN 110013934 A 2019.07.16 C N 110013934 A
权 利 要 求 书1/1页CN 110013934 A 1.一种汽车白车身全自动激光扫描喷涂检测一体系统,其特征在于,包括: 三维激光扫描检测子系统,所述三维激光扫描检测子系统包括冗余三平动索机构和三维激光扫描仪,以在喷涂之前,用于扫描汽车白车身,生成汽车白车身三维模型和喷涂轨迹,并且在喷涂之后,检测汽车白车身表面上漆率和表面质量;和 基于壁挂式六轴喷涂机构的喷涂子系统,所述基于壁挂式六轴喷涂机构的喷涂子系统包括第一和第二壁挂式六轴喷涂混联机构,以根据所述汽车白车身三维模型和喷涂轨迹控制所述第一和第二壁挂式六轴喷涂混联机构协同作业,对不同类型汽车白车身根据预设喷涂策略实施不同的喷涂工艺,完成喷涂作业。 2.根据权利要求1所述的系统,其特征在于,所述冗余三平动索机构包括: 第一至第四绳索; 闭环导轨,所述闭环导轨设置于所述汽车白车身的上方,其中,所述闭环导轨的包围的空间大于所述汽车白车身的俯视空间; 第一至第四卷扬机,所述第一至第四卷扬机分别一一对应通过第一至第四移动副安装在所述闭环导轨上,并且第一至第四卷扬机分别一一对应通过所述第一至第四绳索连接所述三维激光扫描仪。 3.根据权利要求2所述的系统,其特征在于,所述第一至第四移动副中的一个或多个通过磁悬浮磁力驱动、齿轮齿条啮合驱动或滚轮轨道摩擦驱动。 4.根据权利要求1所述的系统,其特征在于,所述第一和第二壁挂式六轴喷涂混联机构的结构完全相同,并分别分布在所述汽车白车身的两侧的墙壁上。 5.根据权利要求4所述的系统,其特征在于,所述第一和第二壁挂式六轴喷涂混联机构的壁挂式六轴喷涂混联机构包括: 机座,所述机座固定在所述墙壁上; 腰部转台,所述腰部转台通过第一转动副和所述机座连接; 第一和第二大臂,第一大臂通过第二转动副和所述腰部转台连接,第二大臂通过第三转动副和所述腰部转台连接; 第一小臂和第二小臂,第一小臂通过第四转动副和所述第一大臂连接,第二小臂通过第五转动副和所述第二大臂连接,其中,所述第一小臂和所述第二小臂通过第六转动副相互连接,所述第二转动副、所述第三转动副、所述第四转动副、所述第五转动副和所述第六转动副的转动轴相互平行; 第一手腕至第三手腕,第一手腕通过第七转动副和所述第一小臂连接,第二手腕通过第八转动副和所述第一手腕连接,第三手腕通过第九转动副和第二手腕连接; 喷枪,所述喷枪和所述第三手腕固接。 6.根据权利要求5所述的系统,其特征在于,所述第一转动副、所述第二转动副、所述第三转动副、所述第七转动副、所述第八转动副和所述第九转动副为驱动副。 2
关于车载激光雷达的知识清单
关于车载激光雷达的知识清单 ?2017年6月28日 ? ?国际电子商情 本篇知识清单分享给你,助你快速了解车载激光雷达产业。 在无人驾驶架构中,传感层被比作为汽车的“眼睛”,包括车载摄像头等视觉系传感器和车载毫米波雷达、车载激光雷达和车载超声波雷达等雷达系传感器。其中激光雷达已经被大部分人认为是实现自动驾驶的必要基础,毕竟传统雷达无法识别物体细节,而摄像头在暗光或逆光条件下识别效率明显降低。 也正得益于无人驾驶汽车市场规模的爆发,预计2030年全球激光雷达市场可达到360亿美元的规模,将成为新的蓝海。本篇知识清单分享给你,助你快速了解车载激光雷达产业。 内容导读: 1.车载激光雷达的技术原理 2.激光雷达在自动驾驶应用中有何优缺点? 3.车载激光雷达有哪些应用? 4.如何降低自激光雷达的成本? 5.国内外最全激光雷达企业介绍 一、车载激光雷达的技术原理 激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,最初是军事用途。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。 这里详细介绍一下车载激光雷达的工作原理及实现方式。第一种是较为传统的扫描式激光雷达,这种设备被架在汽车的车顶上,能够用多束激光脉冲绕轴旋转360°对周围环境进行距离检测,并结合软件绘制3D图,从而为自动驾驶汽车提供足够多的环境信息。 这种激光雷达最初是在11年前的Darpa无人车挑战赛上,由美国Velodyne公司开发并被参赛团队使用(当时采用的是64线的激光雷达方案)。由于那时的成本